Embed Size (px)
Citation preview

DRO Deakin Research Online, Deakin University’s Research Repository Deakin University CRICOS Provider Code: 00113B
Haptic technology for micro-robotic cell injection training systems — a review
Citation of the final article: Faroque, Syafizwan, Horan, Ben, Adam, Husaini, Pangestu, Mulyoto and Joordens, Matthew 2016, Haptic technology for micro-robotic cell injection training systems — a review, Intelligent automation & soft computing, vol. 22, no. 3, pp. 509-523.
This is an Accepted Manuscript of an article published by Taylor & Francis in Intelligent Automation & Soft Computing on 30 Nov 2015, available at: https://www.tandfonline.com/doi/full/10.1080/10798587.2015.1109200
© 2015, TSI Press
Downloaded from DRO: http://hdl.handle.net/10536/DRO/DU:30079972

HAPTIC TECHNOLOGY FOR MICRO-ROBOTIC CELL INJECTION
TRAINING SYSTEMS – A REVIEW
SYAFIZWAN FAROQUE1, BEN HORAN1, HUSAINI ADAM1, MULYOTO PANGESTU2, AND MATTHEW JOORDENS1
1School of Engineering, Deakin University, Waurn Ponds, 3216 Australia 2Department of Obstetrics and Gynaecology, Monash University, Clayton, 3168 Australia
ABSTRACT—Currently, the micro-robotic cell injection procedure is performed manually by expert human bio-operators. In order to be proficient at the task, lengthy and expensive dedicated training is required. As such, effective specialized training systems for this procedure can prove highly beneficial. This paper presents a comprehensive review of haptic technology relevant to cell injection training and discusses the feasibility of developing such training systems, providing researchers with an inclusive resource enabling the application of the presented approaches, or extension and advancement of the work. A brief explanation of cell injection and the challenges associated with the procedure are first presented. Important skills, such as accuracy, trajectory, speed and applied force, which need to be mastered by the bio-operator in order to achieve successful injection, are then discussed. Then an overview of various types of haptic feedback, devices and approaches is presented. This is followed by discussion on the approaches to cell modeling. Discussion of the application of haptics to skills training across various fields and haptically-enabled virtual training systems evaluation are then presented. Finally, given the findings of the review, this paper concludes that a haptically-enabled virtual cell injection training system is feasible and recommendations are made to developers of such systems. Key Words: Bio-engineering; Cell injection; Haptics; Micro-robotics; Skills training; Virtual reality
1. INTRODUCTION Cell injection is the process of inserting a small volume of material, e.g. protein, DNA, sperm or
biomolecules, into a specific location of suspended or adherent cells. The technology has been widely adopted in drug development, toxicology, cellular biology research, transgenics, and in vitro fertilization (Kuncova & Kallio, 2004). The technology can, for example, enable researchers to observe at the cellular level the implications of injecting material or drugs into a cell. It is also extensively used in intracytoplasmic sperm injection (ICSI). ICSI is performed by injecting a sperm into cytoplasmic of a mature egg to enable fertilization.
Conventionally, micro-robotic cell injection is carried out manually by a qualified bio-operator. The task requires the bio-operator to perform operations such as moving the micropipette appropriately in order to penetrate the cell membrane, and requires a high level of skill. It is common for the procedure to be performed by experts who have undertaken extensive training and developed years of experience in order to be proficient at the task. However, despite extensive training, success rates can still remain low (Pillarisetti, Pekarev, Brooks, & Desai, 2006; Sun & Nelson, 2002). One reason for this is that successful injection is not necessarily repeatable. Also, given the nature of the process, manual, or human-in-loop cell injection, is inherently limited to low speed and poor precision (Ghanbari, Wang, Hann, Chase, & Chen, 2009), and low throughput and reproducibility (W. Wang, Liu, & Sun, 2009).
The term haptics refers to the human’s sense of touch (Saddik, Orozco, Eid, & Cha, 2011). Haptics can assist in training users to perform physical tasks and has been used in applications requiring motor skills training such as medicine, sport and aviation. The integration of haptics has shown to improve training against metrics including speed (Palluel-Germain et al., 2007), accuracy (Bettini, Lang, Okamura, & Hager, 2002), and the time taken to master a task (Pocheville, Kheddar, & Yokoi, 2004). Researchers have proposed simulators for cell injection procedures such as ICSI (Abe, Mizokami, Kinoshita, & He, 2007), and also for other procedures including cell indentation (Ladjal et al., 2012) and heart myoblast cell injection (Le, Nahavandi, & Creighton, 2010). None of these works however focus on bio-operator training efficacy for cell injection.
This paper reviews the relevant literature and considers parallels to works where haptic technology has been used for motor skills training and improving user performance. Previous and ongoing related works
1

2
are discussed in the aim of providing an inclusive resource for those looking to apply or extend the approaches presented. Also, the main approaches to cell bio-mechanical modeling introduced by researchers are discussed and may serve as useful information to those working in the domain.
The following section considers cell injection and the challenges associated with the procedure such as accuracy, trajectory, speed and applied force, which need to be mastered by the bio-operator in order to achieve successful cell injection.
2. BACKGROUND In the biological cell injection procedure, the bio-operator is required to appropriately move the
micropipette towards the immobilized cell, puncture the cell membrane at a suitable location, insert the micropipette’s tip into the cell and then deposit the specific material in the cell (Ghanbari, Abdi, et al., 2010). Cell diameters can range from 1 to 100µm (Campbell, Williamson, & Heyden, 2006) and the contact force exerted by the micropipette during cell injection is in the range of mN to µN (Kasaya, Miyazaki, Saito, & Sato, 1999). Successful cell injection can be determined based on cell survivability and is related to injection accuracy, trajectory and speed (Sun & Nelson, 2002), as well as the force applied to the cell membrane during penetration (H. Huang, Sun, Mills, Li, & Cheng, 2009; D.-H. Kim, Yun, & Kim, 2004).
It is worth mentioning that applicable methodologies and technologies may differ for suspended and adherent cells and therefore careful considerations should be made prior to development of a cell injection system. For example, one of the most apparent differences is that the holding or suction micropipette is not normally required for adherent cell injection because this type of cell will naturally adhere to the dish. Unlike adherent cells however, suspended cells typically need to be immobilized and held by a suction micropipette. There are several developed microinjection systems which specialize in either suspended (W. Wang et al., 2009) or adherent (Ghanbari, Wang, et al., 2009; W. Wang, Sun, et al., 2008) cells and accommodate the inherent properties of each cell type. Although suspended and adherent cells have different properties, such as size and morphology, the steps to perform injection of both types of cells are very similar. In this paper, the works discussed are applicable to both cell types and the essential microinjection parameters common to both cell types are discussed in Sections 2.1 and 2.2 below.
2.1 Accuracy and Trajectory Injected material needs to be deposited within the cell’s nucleus, and as such the boundary of the
nucleus needs to be identified (W. Wang, Hewett, Hann, Chase, & Chen, 2008). Given the small size of biological cells, as well as the large variety of cell types, the injection micropipette requires precise positioning (W. Wang, Sun, et al., 2008). To achieve successful injection, the tip of the micropipette should first be positioned to be able to penetrate at a suitable point on the cell membrane. Then, by moving the micropipette, force should be applied to pierce the cell membrane. The micropipette then needs to move through the cytoplasm, stop at the required deposition point (e.g. the nucleus), and then deposit the desired material (Ghanbari, Horan, Nahavandi, Chen, & Wang, 2012). The micropipette’s trajectory needs to be carefully considered in order to prevent damage to the cell and micropipette. For example, when the penetration point on the cell membrane is too far from the center the interaction can cause a torque which can rotate the cell, the micropipette can fail to penetrate the cytoplasmic membrane and potentially collide with the cell holding micropipette. Once the membrane has been penetrated, the optimal micropipette trajectory is along the cell’s diameter line passing through and eventually stopping at the center of the cytoplasmic membrane (Z. Lu et al., 2011). Ammi and Ferreira (2005) discussed how to remove the micropipette once the deposition has been made. To increase the likelihood of success, the micropipette should be extracted back along the path of insertion.
2.2 Insertion Speed and Force A significant challenge in enabling haptic feedback in a cell injection training system is the dynamic
nature of the micro-scale cells making it difficult to determine necessary cell parameters and behavior in order to develop suitable systems to simulate the cell injection procedure.
The cell membrane is delicate and can be easily damaged by excessive insertion force and is a critical parameter in survivability of the injected cells. Accurate force must be applied to the cell membrane during penetration. While insufficient force can result in the micropipette failing to puncture the cell wall, an even slightly excessive insertion force can damage the cell membrane. Being able to measure and control the

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 3
force arising during cell injection can enhance the functionality of cell injection systems (H. Huang, Sun, Mills, & Li, 2006). It is also important, that once the cell membrane has been penetrated, the exerted force be rapidly reduced to avoid overshoot which can cause damage to the opposite wall. Pillarisetti, Anjum, Desai, Friedman, and Brooks (2005) described a force feedback interface which reflected the insertion force to the user. The force change before and during insertion were recorded, which includes the sudden loss of membrane reaction force once puncture has occurred.
Aside from insertion force, the speed of insertion is important to successful cell injection. Different cell types have different physical properties and it is important that the micropipette is inserted and withdrawn at a speed appropriate for the particular type of cell. Determination of the appropriate injection speed is normally based on a bio-operator’s observations and experience (Zhang, Han, Shee, Ang, & Chia, 2007). After successful deposition of the desired material, the micropipette must be retracted as quickly as possible to minimize damage to the cell during removal (Ammi & Ferreira, 2005).
3. OVERVIEW OF HAPTIC FEEDBACK, DEVICES AND APPROACHES In order to develop a virtual reality (VR) training system for a particular application, it is essential that
appropriate feedback, devices and approaches are employed. Haptic feedback can facilitate the user’s sense of touch and feel in virtual training and this section discusses different types of haptic feedback and devices relevant to virtual training.
3.1 Haptic Feedback Haptic feedback refers to the display of information through the human’s haptic modality and can
include force and tactile interaction. Force feedback provides kinesthetic information, while tactile feedback systems emulate cutaneous sensations. Force and tactile feedback and their application to different manipulation tasks are discussed in the following subsections.
3.1.1 Force Feedback Force feedback stimulates the human’s kinesthetic system, which perceives sensations originating in
muscles, tendons and joints. In the medical domain, force feedback has been employed in robotic surgery applications enabling the surgeon to perceive forces such as those exerted by the robot during surgery (Takhmar, 2014; Turro, Khatib, & Coste-Maniere, 2001).
3.1.2 Tactile Feedback Tactile feedback interacts with the human’s cutaneous system, which responds to sensations on the
skin’s surface. These sensations are generated by mechanoreceptors within the skin and are sensitive to mechanical stimuli (Burgess & Perl, 1973). Mechanoreceptors can be categorized by their receptive field size and adaptation rate. Type 1 mechanoreceptors are small and with well-defined borders, and type 2 have large borders which are not well defined. In terms of adaptation rate, there are slow adapting and fast-adapting. Table I illustrates the classification of the mechanoreceptors in human hand skin based on receptive field and adaptation rate properties.
Table I. Characteristics of the Four Types of Mechanoreceptors - Adapted from (Johnson, 2002).
Mechanoreceptor type
Rapidly adapting type 1 (RA)
Slowly adapting type 1 (SA1)
Rapidly adapting type 2 (PC)
Slowly adapting type 2 (SA2)
Afferent ending Meissner corpuscle - small receptive field
Merkel cell - small receptive field
Pacinian corpuscle - large receptive field
Ruffini complexes - large receptive field
Effective stimulus Skin motion Texture (edges, points, curvature)
High frequency vibration
Skin stretch
Frequency range 1-300 Hz 0-100 Hz 5-1000 Hz 0-? Hz
Aside from the more sophisticated haptic devices discussed in Section 3.2, there are range of simpler
input devices which utilize tactile feedback, including the 3D mouse (Paley, 1994), touch screen CRT (Embach, 1989), touch pad panel (Blouin, 1999), and keyboard (Goodwin, Isensee, Poston, & Tsao, 2001).

4
Kuchenbecker et al. are active in this field and their work includes a haptically-enabled oral presentation timing notification system (Tam, MacLean, McGrenere, & Kuchenbecker, 2013), methods for generating haptic texture models (Culbertson, Unwin, Goodman, & Kuchenbecker, 2013; Romano & Kuchenbecker, 2012) and a tool-mediated texture interaction simulation (McDonald & Kuchenbecker, 2013).
3.2 Haptic Devices Haptic devices are mechatronic systems enabling haptic interaction with a human user. The choice of
haptic devices and hardware is a critical consideration to the effectiveness of a haptically-enabled training system. A complete survey of all available haptic devices extends beyond the scope of this work, rather herein devices relevant to the development of a haptically-enabled cell injection training system are discussed. For a wider reaching survey of haptic devices in general, the following works are a good starting point: Biggs and Srinivasan (2002), Fisch, Mavroidis, Melli-Huber, and Bar-Cohen (2003), Hayward and Astley (1996), Hayward, Astley, Cruz-Hernandez, Grant, and Robles-De-La-Torre (2004), and Stone (2001).
Haptic devices can be categorized into two types: ground-based or body-based (Committee on Virtual Reality Research and Development Computer Science and Telecommunications Board National Research Council, 1994). Ground-based devices refer to those where they are attached to the ground or a point in the environment, e.g. a desk or wall. Ground-based devices have the ability to have their mass supported by the ground, and being able to provide grounded forces to the user. Devices in this category include passive devices (without force feedback) such as computer mice, joysticks, steering wheels and flight yokes, and active devices (force reflecting), such as the commercially available Geomagic Touch (previously Phantom Omni) range of devices (3D Systems Inc., 2015). Given their nature, ground-based devices are inherently limited to a restricted working area.
Body-based devices are attached to and supported by the human body. Examples include gloves, suits and exoskeletons which generate haptic sensations. Some well-known commercially available devices are CyberTouch (CyberGlove Systems LLC, 2009) glove which provides vibrotactile feedback to the palm and fingers, the HapticGEAR (Hirose et al., 2001) worn like a backpack and the WearableMaster (Iwata & Nakagawa, 1998) which is mounted on the user’s forearm. Unlike ground-based devices, these provide a theoretically large workspace. This however comes at the cost of the user needing to sometimes support bulky and heavy hardware. This can be especially troublesome if the user needs to use the device for a prolonged period of time.
Researchers have proposed approaches aiming to enhance the capabilities of common grounded Commercial-off-the-Shelf (COTS) haptic devices. One such work is the low-cost 5-DOF haptic interface presented by Isaksson, Horan, and Nahavandi (2012). The interface employs two Phantom Omni devices, which each offers 6-DOF positional sensing and 3-DOF force feedback, to provide a low-cost 5-DOF haptic interface while maintaining the Phantom Omni’s stylus interaction. A similar approach was introduced by Shah, Teuscher, McClain, and Abbott (2010) which uses two Novint Falcon devices to build a very low-cost 5-DOF haptic wand. Both approaches provide the user with 3-DOF Cartesian forces and 2-DOF pitch and yaw torques. While COTS haptic devices offering 5-DOF or more are available, it should be acknowledged that they can be expensive and potentially cost prohibitive for the proposed virtual training system.
The use of a 5-DOF haptic device providing pitch and yaw torques and 3-DOF Cartesian forces, offers significant potential for a virtual training system for cell injection. The 3-DOF forces can be used to represent the interaction of the injection micropipette in 3D Cartesian space, while the pitch and yaw torques can represent the micropipette’s orientation. Given the nature of the cell injection process, and that of the micro-manipulator used to move the micropipette, representing the roll rotation of the micropipette is of lesser importance and given the cost for which the 5-DOF system can be achieved using approaches such as that Isaksson et al. (2012) and Shah et al. (2010), a 5-DOF solution represents a valuable trade-off when compared with the cost of purchasing a 6-DOF device.
Researchers have proposed approaches modifying the functionality of commercial haptic devices to better suit specific applications. One example is Horan et al.’s Reconfigurable Multipurpose Haptic Interface (Horan, Faroque, Isaksson, & Ang, 2014) providing a low-cost mobile platform and four kinematic configurations achieved by using two Phantom Omnis and customized detachable end-effectors. Some of the applications which have already utilized this interface are such as the above mentioned 5-DOF haptic stylus (Isaksson et al., 2012), the multi-point haptic grasping (Ang, Horan, Najdovski, & Nahavandi,

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 5
2011) and haptic VR micro-robotic cell injection training environment (Faroque, Horan, Adam, Pangestu, & Thomas, 2015).
3.3 Approaches to Haptic Feedback There are three different approaches normally used for incorporating haptic feedback for performance
and training. These are (i) virtual fixtures, (ii) record/replay strategy, and (iii) the shared control paradigm (O'Malley, Gupta, Gen, & Li, 2006). To overcome the passive learning problems associated with the application of these three approaches, progressive haptic guidance has also been proposed by researchers and is discussed in Subsection 3.3.4.
3.3.1 Virtual Fixtures Virtual fixtures were first introduced by Rosenberg (1992, 1993a, 1993b) as a perceptual overlay used
to enhance telepresence and assist the operator in controlling a robot in a remote environment. Virtual fixtures are passive guides able to assist the operator in following an ideal trajectory or surface, or from moving past a predetermined geometrical area and moving into a prohibited zone (Abbott, Marayong, & Okamura, 2007). Haptic virtual fixtures have demonstrated to enhance performance in path following tasks against metrics such as speed and precision (Bettini et al., 2002; Marayong, Bettini, & Okamura, 2002; Payandeh & Stanisic, 2002). The benefits of using virtual fixtures for guidance in a training environment was investigated by Kuang, Payandeh, Zheng, Henigman, and MacKenzie (2004) where participants used a haptic device to hold a virtual object and then bring it to a target location at the end of a maze. The results of the work indicated promising learning outcomes against time taken and path length for the performed task.
3.3.2 Record/replay Strategy The record/replay strategy is used for training where the interaction with a haptic device by an expert is
recorded and subsequently played back to the learner. Using such an approach the learner can feel the ideal motion and conform to it, and then later attempt to perform it without guidance from the haptic device. Yokokohji, Hollis, Kanade, Henmi, and Yoshikawa (1996) focused on human-to-human skills transfer systems using haptic and visual representation. Despite having proven to be effective in skills transfer and training, a limitation of the record/replay strategy is that the learner is passive while undergoing training due to the absence of corrective feedback. The work developed a prototype of a WYSIWYF (‘What You See Is What You Feel’) display employing the record/replay strategy. Their experiments involved manipulating and moving a simple virtual cube on a flat table, however were later considered by the authors as not challenging enough to obtain significant results. The paper does however provide useful information and ideas regarding the feasibility of utilizing the record/replay strategy for skills training. A later study by K. Lu, Liu, Zhang, Guo, and Zhou (2010) applied the record/replay strategy to a virtual tank gunnery skills training system. In one of its two system modes, the expert would move a handle to draw a virtual sine path. The path was recorded and played back using a proportional-derivative (PD) controller. Although this experiment showed that the PD controller can provide comparable replication of the expert’s movement, the actual effectiveness of the system for skills training and acquisition requires further investigation.
3.3.3 Shared Control Paradigm The shared control paradigm provides automatic intervention to the user’s control of a system (Li,
Patoglu, & O'Malley, 2009). In a training system shared control can provide corrective feedback to the user by dynamically intervening during training. In a series of studies, O’Malley et al. demonstrated that shared control can enhance performance (O'Malley & Gupta, 2003a) and training outcomes (O'Malley & Gupta, 2003b) in a dynamic targeting task. They implemented a modified Fitts’ Law (Fitts, 1954), which has been widely used for measuring human hand-eye coordination performance, to examine performance and learning improvement when controlling an under-actuated slave system. In the studies, subjects were instructed to maneuver the end-effector to hit a fixed pair of targets, alternating on each repetition. Four pairs of targets were used with only one individual target being active at any time. If performed correctly this should typically produce rhythmic movement similar to that of controlling a yo-yo. The results showed that the haptic guidance assisted in improving task performance.

6
3.3.4 Progressive Haptic Guidance As mentioned earlier progressive haptic guidance has also been proposed by researchers to overcome
passive learning associated with the application of the approaches discussed in the above three subsections. When learning passively, learners are likely to expend less effort on correcting their movements even when making noticeable mistakes, and as a result it is possible that passive visuo-haptic training may achieve efficacy no better than visual training alone (Yang, Bischof, & Boulanger, 2008).
To overcome an over-reliance on error-correction and guidance features, Huegel and O'Malley (2009), and Li, Huegel, Patoglu, and O'Malley (2009) presented a progressive guidance training system where guidance gradually reduced as the trainee’s performance improved. The works by O'Malley et al. (2006) and Li, Patoglu, et al. (2009) both developed a virtual mass-spring-damper system to study the efficacy of an error-reducing guidance scheme. In the experiments, participants were asked to control an under-actuated mass-spring-damper system so as to alternately hit the given pair of targets during 20-second intervals. The results demonstrated that progressive haptic guidance can improve training of a dynamic task.
The ability to employ progressive haptic guidance, where the level of guidance to the user decreases as the user’s performance improves, and even where the complete removal of guidance once a performance threshold has been reached, has significant potential for a haptically-enabled cell injection training system. Such an approach could allow users to train using the training system and then once adequately trained, move to a real-world system, which may not have haptic guidance to perform cell injection.
4. CELL MODELING APPROACHES Accurate biomechanical cell models are required for a virtual cell injection training environment. The
approaches to cell modeling discussed in this section provide some insight into modeling techniques that may be utilized to represent the cell interactions within a virtual cell injection training system.
As depicted by Figure 1, most of the models developed for representing the biomechanical properties of living cells can be classified into three main approaches: (i) continuum; (ii) energetic; and (iii) micro/nanostructural.
A detailed review of the continuum approach can be found in the work by Lim et al. (2006). Using such an approach, cells are considered as continuum materials with fluidic, elastic, viscoelastic or solid properties. As shown by Figure 1 there are different modeling techniques which can be classified as continuum approaches.
The Newtonian liquid drop model considers a cell as a uniform liquid core encapsulated by a cortical shell (Yeung & Evans, 1989). The technique has been applied and investigated in a variety of works to achieve various research aims (Needham & Hochmuth, 1992; Thoumine, Cardoso, & Meister, 1999; Tran-Son-Tay, Needham, Yeung, & Hochmuth, 1991; Tsai, Frank, & Waugh, 1993). Some researchers have discussed the non-homogeneous characteristic of the cell’s inner region and that the nucleus has greater stiffness and viscosity than the surrounding cytoplasm (Caille, Thoumine, Tardy, & Meister, 2002; Dong, Skalak, & Sung, 1991; Guilak, Tedrow, & Burgkart, 2000; Maniotis, Chen, & Ingber, 1997). For this reason, the compound Newtonian liquid drop model employs a more complex structure using three major cell layers (Dong et al., 1991; Hochmuth, Ting-Beall, Beaty, Needham, & Tran-Son-Tay, 1993; Tözeren et al., 1992). Each of the three layers; the plasma membrane, cytoplasm and core, have their own mechanical properties. The outermost layer is the plasma membrane with an approximate thickness of 0.1µm (Zhelev, Needham, & Hochmuth, 1994) and under constant tension. The cytoplasm is the middle layer and has the smallest viscosity value. The innermost layer, the core layer, represents the nucleus of the cell and surrounds the cytoskeleton. It has higher viscosity but smaller volume than the middle/cytoplasm layer. The compound Newtonian liquid drop model also considers some other additional parameters and according to Lim et al. (2006) is more proficient in modeling the actual cell and representing some of the non-linear events which cannot be achieved by using the homogeneous model. As opposed to both of the earlier discussed Newtonian models, the data from Tsai et al. (1993)’s experiment demonstrated non-Newtonian behavior of the neutrophil cytoplasm. To characterize this non-Newtonian behavior of the cytoplasm the mean shear rate was estimated based on numerical simulation. The paper describes the shear thinning behavior of the neutrophil cytoplasm and suggests that the power-law fluid model is a more suitable model. Using the shear thinning liquid model the cell cytoplasm is modeled as a power-law liquid surrounded by a cortex with constant tension and offers benefits for representing the large deformation of the human neutrophils. While the shear thinning liquid model can effectively represent large cell deformation, there is

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 7
also the need for a model which considers the small deformations likely to occur during the initial phase of micropipette aspiration. The Maxwell liquid drop model was employed to examine the deformations of partially aspirated cells into a small micropipette, as well as the recovery of cells after the expulsion from full aspiration into a large micropipette (Dong, Skalak, Sung, Schmid-Schönbein, & Chien, 1988). It was observed that the model is able to replicate the experiment results of using a micropipette for rapid small deformation during the initial entry and gradual recovery after undergoing a large deformation.
In addition to liquid-like cell models, some researchers have also considered the solid behavior of
certain types of cells such as chondrocytes and endothelial (Hochmuth, 2000; W. R. Jones et al., 1999). Using solid models the entire cell is assumed to be homogeneous and unlike the cortical shell-liquid core models, there are no multiple layers such as the cortical and cytoplasm layers. Elastic solid models, which are fundamental to the below discussed viscoelastic solid model, are constructed based on experiments on cells using micropipette aspiration (Theret, Levesque, Sato, Nerem, & Wheeler, 1988), cell poker (Petersen, McConnaughey, & Elson, 1982), magnetic twisting cytometry (Mijailovich, Kojic, Zivkovic, Fabry, & Fredberg, 2002) and atomic force microscopy (Bilodeau, 1992). The viscoelastic solid model was first proposed for evaluating the rheology and mechanical properties of leukocytes in micropipette aspiration experiments (Schmid-Schönbein, Sung, Tözeren, Skalak, & Chien, 1981). It was determined that the solid viscoelastic model is capable of precisely characterizing the small strain deformation of the leukocytes.
Later research by Fabry et al. (2001) inferred that the cytoskeleton undergoes a sol-gel transition, where it exists in the form of liquid and then a solid in the sol and gel phases respectively. Based on experimental data, the authors identified that rather than behaving as the assumed gel, the investigated cells exhibit soft glassy material (SGM) behavior, existing close to a glass transition. As such the power-law structural damping model was proposed because the viscoelastic models are not suited to represent the rheology of SGMs.
Single-phase models such as those discussed above often fail to represent certain essential cell behaviors such as volume variation as the result of mechanical or osmotic loading, mechanical foundation due to viscoelasticity, and the association of mechanical, electrical and chemical attributes inside the cell (Guilak, Haider, Setton, Laursen, & Baaijens, 2006). Multiphasic (biphasic and triphasic (Lai, Hou, &
Cortical shell-liquid core/liquid drop
models • Newtonian (Yeung &
Evans, 1989) • Compound (Dong et
al., 1991; Hochmuth et al., 1993; Tözeren et al., 1992)
• Shear Thinning (Tsai et al., 1993)
• Maxwell (Dong, 1988)
Fractional derivative model
• Power law structural damping (Fabry et al., 2001)
Biomechanical Models for Living Cells
Micro/nanostructural approach Continuum approach Energetic approach
Viscoelastic models Multiphasic models
Solid models • Elastic (Bilodeau,
1992; Mijailovich et al., 2002; Petersen et al., 1982; Theret et al., 1988)
• Viscoelastic (Schmid-Schönbein et al., 1981)
• Percolation theory and polymer physics models (Forgacs, 1995)
• Glass-transition model (Cohen & Grest, 1979)
Cytoskeletal models for adherent cells
• Tensegrity model (Ingber, 1993; Ingber & Jamieson, 1985)
• Tensed cable networks (Coughlin & Stamenović, 2003)
• Open-cell foam model (Satcher Jr & Dewey Jr, 1996)
Spectrin-network model for erythrocytes
(Boey et al., 1998; Discher et al., 1998; Lee
et al., 1999) Biphasic models
(Mow, Holmes, et al., 1984; Mow,
Kuei, et al., 1980)
Triphasic models (Lai et al., 1991)
Figure 1. An Overview of Approaches for the Mechanical Modeling of Living Cells (Ladjal, Hanus, & Ferreira, 2008a; Lim, Zhou, & Quek, 2006).

8
Mow, 1991)) models were designed to take into consideration the relationship between solid, fluid and, in certain instances ionic phases, of cells. The fundamental basis of biphasic theory is that articular cartilage and chondrocytes are treated as a mixture of fluid and solid (Mow, Holmes, & Lai, 1984; Mow, Kuei, Lai, & Armstrong, 1980).
Unlike continuum approaches which consider cells to contain certain continuum material properties, energetic approaches consider the contribution of the cell structure to the energy budget of a cell. Energetic approaches are based on percolation theory and polymer physics models (Cohen & Grest, 1979; Forgacs, 1995) and provide the advantage of being independent of the coordinate system selection and cytoskeleton structure (Ladjal et al., 2008a). However the approach has the drawback that it requires large cell deformation and disregards the extracellular matrix attributes of cell mechanics (Asgari, Ghanbari, & Nahavandi, 2011).
The third category of cell models considered are micro/nanostructural approaches which focus on the inner molecular structure of cells as the key factor for determining biomechanical properties. One such model is the spectrin-network model developed for examining the role of the spectrin-network and cell membrane in large deformation of red blood cells. This model assumes that the mechanical properties of the cell membrane are influenced by the intrinsic elasticity and topology of spectrin within the skeleton (Hansen, Skalak, Chien, & Hoger, 1997). The basis for the approach was introduced by Discher et al. (Boey, Boal, & Discher, 1998; Discher, Boal, & Boey, 1998; Lee, Wong, & Discher, 1999) who discussed a spectrin-based model which exists in between continuum and atomic scales. While the spectrin-network model was developed for suspended cells, it remains unclear as to whether it is suitable for modeling adherent cells.
The tensed cable network model on the other hand was proposed to enable prediction of adherent cells’ mechanical response. In a study by Coughlin and Stamenović (2003), actin cytoskeletons of adherent cells were modeled as a network of pre-stressed elastic cables. Simulations of adherent cell deformation were performed to emulate the measurement techniques of cell poking, magnetic twisting cytometry and magnetic bead microrheometry. While the model was not able to fully represent cell response for magnetic twisting cytometry and magnetic bead microrheometry, the simulations demonstrated that filament tension is a key determinant of the response of the model.
Another microstructural modeling approach is the tensegrity model introduced by Ingber (1993), and Ingber and Jamieson (1985). The approach is based on the tensegrity architecture introduced earlier by Fuller (1961) and represents an adherent cell by a network of pre-stressed cables connected to sets of rigid struts. The pre-stressed cables represent the microfilaments and intermediate filaments while the rigid (compression-resistant) struts represent the microtubules of the cytoskeleton. The premise of this model is that the cytoskeletal mesh holds initial stress (pre-stress) before the application of any external loading, and the pre-stress is balanced by the compression of the microtubule (strut) and extracellular matrix adhesion (Stamenović, 2006).
In order to replicate the mechanics of endothelial cells, an open-cell foam model (Satcher Jr & Dewey Jr, 1996) was developed by applying the theory of foam (Gibson & Ashby, 1997). The authors observed that the endothelial cell cytoplasm is filled by a network of cross-linked F-actin - distributed cytoplasmic structural actin (DCSA). The developed model considers DCSA as having a foam-like microscopic structure. Based on computation and comparison with experimental data, it was determined that implementation of the theory of foam is useful for modeling the DCSA network to determine endothelial cell mechanical properties.
It is apparent that a cell’s biomechanical properties vary according to the cell’s type. As such, different techniques are required for modeling different cell types. The models presented in this section, with modification as required, can be used to represent the biomechanical properties of cells within a virtual environment. These properties such as viscosity, elasticity, etc. can then be displayed to the user by the haptic device.
5. HAPTICALLY-ENABLED SKILLS TRAINING Over the past two decades, haptic technology has been considered for enhancing human motor skills
training in applications such as weapons handling (Chen & Barnes, 2008; Liu & Lu, 2011), vehicle maneuvering (Arioui, Nehaoua, Hima, Seguy, & Espie, 2010; X. Wang, Seet, Lau, Low, & Tan, 2000), sporting (P. Y. Huang, Kunkel, Brindza, & Kuchenbecker, 2011; Ruffaldi et al., 2009), medical operation

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 9
(Basdogan et al., 2004; Nudehi, Mukherjee, & Ghodoussi, 2003), and handwriting and calligraphy (Boroujeni & Meghdari, 2009; Y. Kim, Duric, Gerber, Palsbo, & Palsbo, 2009; Nishino, Murayama, Kagawa, & Utsumiya, 2010; Palluel-Germain et al., 2007; Shuto, Nishino, Kagawa, & Utsumiya, 2009; D. Wang, Zhang, & Yao, 2006; Wu, Wang, & Zhang, 2009). This section discusses existing approaches to haptically-enabled skills training and their relevance to a VR cell injection training system.
5.1 Haptics in Motor Skills Training According to Godfrey and Kephart (1969) ‘motor skill’ refers to “an activity of a person involving a
single or a group of movements performed with a high degree of precision and accuracy” (p. 8). Fitts and Posner (1967) suggest that the learning process is sequential and that there are three different phases when learning a new skill: 1. Cognitive phase: identifying and developing the skill components including construction of
corresponding mental images. 2. Associative phase: relating the skill components to a refined action including training and reflection to
achieve perfection. 3. Autonomous phase: developing an automatic action where minimum awareness or attention required
when performing the skill (only certain performers are able to achieve this stage) (Fitts & Posner, 1967).
Research by Solis, Avizzano, and Bergamasco (2003) demonstrated that haptic feedback can be used to
improve learning in the first two phases. In the study, reactive robot control and hidden Markov models were used to replicate Japanese characters and evaluate the stochastic user’s performance. The user’s performance significantly improved when both visual and haptic cues were supplied.
5.2 Haptics in Micro-manipulation Training Cell injection can be considered as micro-domain manipulation due to the small value of the parameters
(sizes, forces, etc.) involved in the procedure. There are both similarities and differences to macro domain manipulation which should be considered in developing an effective micro-manipulation system (Menciassi, Eisinberg, Izzo, & Dario, 2004). Amongst these considerations are the fabrication and actuation of the micro-mechanism so as to ensure mechanical performance, as well as the effects of operating at the micro-scale where forces such as electrostatic and Van der Waals become significant. Also, the three-dimensional integration between micro-size parts can make the development of 3D micro-manipulation systems difficult (Fukuda & Arai, 2000).
Given the challenges inherent to using current micro-manipulation systems, realization of a VR training system offers significant promise. Moreover, by employing haptics, these VR training systems can provide the user with additional information and physical guidance such as through virtual fixtures, record and replay, and shared control. This section reviews some of the related work.
In the field of rational drug design, Sourina, Torres, and Wang (2008) proposed a haptically-enabled virtual biomolecular docking system for studying helix-helix interactions. It was proposed that the system can be used for e-learning in subjects such as physics and chemistry. Haptics for the docking process was also considered by Persson et al. (2007) where a Chemical Force Feedback system was developed and experimental validation with 23 Biological Chemistry and Biotechnological Engineering undergraduate students demonstrated that it assisted students in understanding important information related to ligand-enzyme interaction.
Marchi et al. (2005) evaluated an educational haptic system for studying nano-scale physical phenomenon (approach-retract phenomenon). Forty post-graduate Physics students took part in the experiments and the results showed improvement in students’ understanding and skills acquisition. M. G. Jones, Andre, Superfine, and Taylor (2003) investigated the use of a haptically-enabled web-based learning tool for improving students’ knowledge regarding viruses, microscopy, and nanometer scale. Based on assessment of fifty high school students, it was demonstrated that comprehension of micro-scale, virus morphology and dimensionality had improved as a result of using the web-based tool.
Given the demand for optical fiber by the industrial sector, Luo and Xiao (2006) developed haptically-enabled VR models for micro/nano optical fiber assembly tasks. Based on the experimental results, it was

10
argued that the developed models and simulation could be valuable for micro/nano-scale skills training and automated assembly designs.
In the area of cellular studies, Minogue, Jones, Broadwell, and Oppewall (2006) explored the advantages of haptic feedback augmentation for a VR program for middle-school Science instruction. Eighty students participated in experiments which examined the cognitive and affective impact of haptic technology on students’ knowledge of an animal cell’s structure and functions. The paper presents important theoretical and practical fundamentals to be considered in the development and implementation of haptically-enabled instructional VR programs in terms of the system’s impact on students.
5.3 Haptics in Medical Skills Training The use of haptic technology in virtual simulation for medical training has received significant interest
over the past 15 years (Peterlik, Nouicer, Duriez, Cotin, & Kheddar, 2011). Coles, Meglan, and John (2011) present a detailed discussion of the role of haptic technology in virtual medical training applications. Surgical training is an important area benefiting from the application of haptic technology.
Most medical procedures require fine motor skills such as precise movement (mainly focused on the coordination of wrist, hands and fingers), and control of applied forces. These skills are similar to those required to perform cell injection. There are also similarities in the types of tools used in both procedures such as the injector (syringe and pipette), and the grasper and holder.
Researchers have presented various studies employing haptically-enabled medical skills training systems for procedures such as manual surgery (Fu, Yuan, Du, & Song, 2005; Sewell et al., 2007; Shen et al., 2008; Tokuyasu, Kitamura, Sakaguchi, & Komeda, 2003; Yaacoub, Hamam, & Abche, 2008), telerobotic surgery (Niemeyer et al., 2004; Xie et al., 2011) and dentistry (Tse et al., 2010), as presented in Table II. These studies provide valuable knowledge and insight related to the development of a haptic cell injection training system.
Table II. Utilization of Haptic Technology in Medical Skills Training.
Application area Application Training focus Literature reference
Surgery General surgical procedures, e.g. stapedotomy and cochleostomy
Virtual drilling simulation Sewell et al., 2007
Eye cataract surgery, i.e. replace a clouded lens with an artificial lens
Cataract surgery simulation Shen et al., 2008
Cardiac muscle palpation for cardiac surgeon
Training system consists of virtual beating heart and haptic device
Tokuyasu et al., 2003
Virtual surgery Virtual surgical system consists of virtual scalpel Fu et al., 2005
Wrist arthroscopic surgery Computer-based training simulation Yaacoub et al., 2008
Telerobotics surgery
Telerobotic surgical training Surgical simulation using THUMP console Niemeyer et al., 2004
Telerobotic spine surgery VR simulation system Xie et al., 2011
Dentistry Common dental procedures, e.g. drilling, caries removal and cavity preparation
VR simulation system with master-slave control structure
Tse et al., 2010
5.4 Haptics in Cell Injection When performing cell injection, the human bio-operator mostly depends on visual information via a
microscope which is prone to errors such as slippage, overshoot, hand tremor and excessive contact force which can easily damage the cell or micropipette. This section considers studies which propose haptic technology for cell injection. Haptics can be applied for real-time cell injection assistance, such as the haptic display of cell injection forces, or for training using a virtual environment, using for example cell models for providing a virtual representation of a cell to be injected. To demonstrate the performance improvement of utilizing haptic technology in haptically-enabled cell injection setups the results of user evaluation of are presented in Subsection 5.4.5.

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 11
Common techniques for employing haptics for cell injection are by using physical polyvinylidene
fluoride (PVDF) force sensors, image analysis, cell biomechanical models and virtual fixtures - as described in the subsections below (see Figure 2 for an overview). These techniques have been utilized to aid bio-operators both in real-time operation and offline cell injection training and simulation. Force sensors and image analysis are mainly applied to real-time applications whereas cell biomechanical models can be used as the basis for real-time estimation of cell injection forces or for representing virtual cells in virtual training and simulation. Like cell biomechanical models, virtual fixtures have been employed in both real-time applications and virtual training.
5.4.1 Force Sensors PVDF sensors can be used to measure forces during real-time cell injection procedure which can then
be displayed to the bio-operator so as to assist them during the procedure. Additionally the data recorded from the sensor during injections could also be useful to formulate realistic cell biomechanical models. Studies by Cho and Shim (2004), and D.-H. Kim, Kim, Yun, and Kwon (2004) were amongst the earliest work using haptic augmentation for cell injection. Both studies introduced systems aimed at overcoming the problems associated with the conventional cell injection procedure. Micro end-effectors were developed by attaching a PVDF sensor to the micropipette tip enabling measurement of contact and penetration forces. This force information was then displayed by a haptic device enabling the bio-operator to feel the injection force. The papers demonstrated the capability of the systems to measure injection force with high signal-to-noise ratio, stability, linearity and repeatability. The usability and practicality of the system however requires further research. Pillarisetti et al. (2005) then proposed the integration of visual and haptic feedback in a semi-automatic cell injection system. The work successfully implemented and calibrated a force sensor and integrated a force feedback interface to display forces to user during the cell penetration process. Experiments performed on two types of egg cells, salmon and flying fish, demonstrated that the user could easily feel the puncture of the cell membrane based on the sudden drop of force felt through the haptic device. This system relies on access to a suitable force sensor, and the authors suggest that the system may not be able to be generalized to cells smaller than 50µm. This is a significant limitation considering that plant and animal cells can have a diameter as small as 1µm (Campbell et al., 2006). In their later work, Pillarisetti et al. (2006) developed a cell injection system with visual and force feedback able to measure force within the μN range. Evaluation involving 40 novice subjects performing injection of trepan blue dye into zebrafish egg cells demonstrated that providing both types of feedback simultaneously can lead to higher injection success rates (see Subsection 5.4.5). However a comparative study of the subjects’ performance against other parameters such as trajectory and accuracy would prove a useful benchmark for the feasibility of haptic technology for the procedure.
5.4.2 Image Analysis To aid bio-operators during physical cell injection, Ammi and Ferreira (2005) developed a user
interface providing a combination of visual and haptic feedback. Rather than a physical PVDF force sensor, a vision-based biomembrane pseudo-force technique which estimates the applied force, was used. Based on the force information, a virtual fixture in the form of a cone-shaped attractive haptic force was used to assist the bio-operator. Aside from the complexity and lacking commercial availability of PVDF cell force sensing, the vision-based approach enables estimation of forces in different areas of the cell in contrast to
Haptics in Cell Injection
Force Sensors
(D.-H. Kim et al., 2004; Pillarisetti et al. 2005, 2006; Cho & Shim, 2004)
Cell Biomechanical Models
(Horan et al., 2011; Ladjal et al., 2008a, 2008b, 2011)
Image Analysis
(Ammi & Ferreira, 2005; Ammi et al., 2006)
Virtual Fixtures
(Ghanbari, Abdi, et al. 2010; Ghanbari, Chen, et al. 2010;
Ghanbari, Horan, et al., 2012)
Figure 2. Techniques Proposed for Cell Injection.

12
using a PVDF sensor attached to a micropipette which can only measure at the single point of contact. The paper however does not evaluate the impact of providing the haptic information to bio-operator performance. Later work by Ammi, Ladjal, and Ferreira (2006) presents a 3D pseudo-haptic rendering system through integration of visual tracking data of cell deformation and a mass-spring-damper model to estimate interaction forces. The paper also demonstrated convincing experimental results showing the practical efficacy of the multimodal system (see Subsection 5.4.5).
5.4.3 Cell Biomechanical Models The modeling of cell’s biomechanical properties is challenging. While the works discussed in Section 4
present underlying concepts and approaches to cell biomechanical modeling, this subsection focuses on cell biomechanical models developed specifically for haptically-enabled cell injection systems. Several works discussed in this subsection present the application of cell biomechanical models discussed in Section 4 for virtual micro-robotic cell injection environments. The dynamic modeling of cytoplasm and cytoskeletons using the finite element method (FEM) with a mass-tensor model and viscoelastic Kelvin–Voigt elements was proposed by Ladjal et al. (2008a), and Ladjal, Hanus, and Ferreira (2008b). The model was used to simulate cell deformation during the perforation process. Both studies aimed mainly at developing a virtual environment with a visual and haptic interface to assist in training and simulation of the cell injection procedure. Their later work (Ladjal, Hanus, & Ferreira, 2011) described the development of a computer-based training system for simulating ICSI in a virtual environment. The haptic and visual feedback elements of the system make it applicable to bio-manipulation training.
To reduce training and maintenance costs, Horan et al. (2011) presented an offline training system by developing a virtual replication of their haptic cell injection system. The training system has the ability to augment the virtual environment with training aids and other information. In order to virtually represent the cell deformation and penetration force in a realistic manner, the particle-based cell model introduced by Asgari et al. (2011) was implemented. The work by Horan et al. (2011) also discusses two different approaches to the development of the virtual training environment. First, the virtual environment was developed using Webots simulation software (Michel, 2004), however satisfactory real-time interaction with the virtual cell could not be achieved due to the update rate of the software. Second, a virtual training environment was developed using C++ and DirectX and demonstrated improved graphics and cell rendering. The preliminary work may contribute to future work into more comprehensive studies development of haptically-enabled cell injection training systems.
5.4.4 Virtual Fixtures An alternative to existing autonomous and semi-autonomous cell injection systems is presented by
(Ghanbari, Abdi, et al., 2010) and (Ghanbari, Chen, et al., 2010), where haptic devices are used to intuitively command (Ghanbari, Horan, Nahavandi, Chen, & Wang, 2009) and control (Ghanbari, Chen, & Wang, 2009) a micro-robot. The paper describes a micro-robotic system which guides the bio-operator during the cell injection procedure using haptic virtual fixtures. The system guides the bio-operator to appropriately maneuver the micropipette towards the cell membrane for penetration and then after penetrating the cell membrane, to terminate the micropipette’s movement at a deposition target location inside the cytoplasm. The papers introduce cone and paraboloid-shaped force-field haptic virtual fixtures. These virtual fixtures provide haptic forces to bio-operator’s hand as guidance so to move the micropipette tip along a desirable trajectory to an appropriate penetration point at the cell membrane. Apart from the guidance virtual fixtures, the papers also introduce a planar forbidden region virtual fixture (Abbott et al., 2007) to stop the bio-operator from commanding the micropipette tip beyond the deposition target location within the cell.
Ghanbari et al.’s work is perhaps one of the latest published papers concerning the implementation of haptic technology for cell injection (Ghanbari et al., 2012). One of the main contributions is the realization of a haptically-enabled micro-robotic system for assisting bio-operators in performing real-time cell injection. In order to guide the bio-operator to the appropriate penetration point, the same virtual fixtures concept as introduced in their earlier works (Ghanbari, Abdi, et al., 2010; Ghanbari, Chen, et al., 2010) was utilized. A new neiloid-shaped force-field virtual fixture was introduced and the three volumetric (neiloid, cone and parabolic) virtual fixtures were then compared against each other in order to evaluate their performance in terms of success rate and completion time. Another significant contribution of the paper is the implementation of a virtual training environment to replicate the haptically guided cell injection system.

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 13
This allows the bio-operator to perform offline training and later on apply their acquired skills to the actual cell injection system. To better utilize this innovation, detailed studies are required to analyze the efficacy of the approach in terms of skills acquisition and motor learning.
5.4.5 User Evaluations on Haptics for Micro-robotic Cell Injection The works discussed thus far in this section have considered the technical aspects of employing haptics
for micro-robotic cell injection. Included amongst them, are two studies which have undertaken user evaluation in order to investigate the performance improvement when haptic feedback is provided. Both studies observed better performance when haptic feedback was provided, as shown in Table III.
Table III. Performance Results for Haptically-enabled Micro-robotic Cell Injection.
Haptic Technique(s) Utilized
No. of Subjects Results Literature reference
Force sensor for measurement and display of cell injection forces
Forty novice participants • Higher success rate with haptic feedback • No significant improvement of completion time
Pillarisetti et al., 2006
Image analysis and cell biomechanical model for interaction force estimation and virtual fixtures for haptic guidance
Thirteen participants (experts, students and technicians)
• More stable micropipette motion with haptic feedback
• Lower execution time with haptic feedback • Higher participant appreciation with haptic
feedback
Ammi et al., 2006
The study by Pillarisetti et al. (2006) (discussed in Subsection 5.4.1) found that 30 of 40 participants’
achieved higher success rates when haptic feedback was provided compared with that of visual feedback alone. In the experiments participants were asked to perform five trials with visual feedback only and then five trials with combined visual and haptic feedback. Freshly harvested zebrafish eggs with diameter range between 600−700µm and trepan blue dye were used for injection. Two scenarios were considered in the experiments: transparent and non-transparent (simulated by prohibiting participants from seeing the material deposition process) cells. For the non-transparent cell injection trials, the results showed that participants achieved an average success rate of 37% subject to visual feedback only and 81% for visual and haptic feedback combined. For the transparent cell injection trials the average success for using the visual feedback only was 75% and 89% for the visual and haptic feedback combined.
In the work by Ammi et al. (2006) (discussed in Subsection 5.4.2), thirteen participants from different backgrounds (experts, students and technicians) were evaluated. Execution time and participants’ appreciation were among the parameters considered for two different scenarios. In the first scenario participants were asked to perform cell injection with and without haptic feedback. The results showed that all participants improved their execution time when haptic feedback was provided. Twelve of the thirteen participants rated higher appreciation for the haptic feedback. The second experiment scenario was designed to consider the rectilinear virtual fixture proposed in addition to the haptic feedback. The results demonstrated significant improvement in execution time when the virtual fixture was provided for both with and without haptic feedback, compared to when only haptic feedback was provided. The appreciation rates were at their highest when both haptic feedback and virtual fixture provided simultaneously.
6. HAPTIC SYSTEM EVALUATIONS The use of haptic technology, especially in skills training, requires a combination haptic hardware with
other computer-based technologies which may provide different sensory information, e.g. visual and sound. The system as a whole, which is the combination of these technologies, can provide a VR environment. As such another topic worth discussing is the application of VR in providing skills training. Before being able to develop an effective virtual training system, thorough investigation of the components involved for specific skills training should be made in order to achieve the desired results of using such a system. For example, it is important to take into account components such as hand trajectory, speed of movement, location accuracy and applied force in performing successful cell injection. However, even if the system has

14
been carefully designed to consider all of the necessary skills, the efficacy of the system as a tool for assisting users in mastering the skills requires extensive evaluation. Realism of the VR, long-term skills acquisition and retention, and transferability of skills all need to be considered.
According to Samur, Wang, Spaelter, and Bleuler (2007), there are two commonly employed evaluation methods for haptically-enabled VR systems, the haptic interface performance and the user perceived haptic feedback. The first method is generally performed using algorithm validation and comparison based on the rendering realism (Ruffaldi, Morris, Edmunds, Barbagli, & Pai, 2006), while the second, involves evaluation of psychophysical factors to measure feedback perceived by users (Murray, Klatzky, & Khosla, 2003). Various human factor analyses have evaluated the haptic systems performance in sensory-motor control tasks, in terms of both the haptic interface and the feedback perceived by users (Ricciardi et al., 2010; Samur et al., 2007; Sutcliffe, Gault, & Shin, 2005). Apart from these, there are also several works which propose different methodologies for haptic system evaluation. Among the recent work in this area has been of the work by Jia et al. which introduced a Multidimensional User-centered Systematic Training evaluation (MUSTe) method for haptically-enabled VR training systems (Jia, Bhatti, Mawson, & Nahavandi, 2009; Jia, Bhatti, & Nahavandi, 2009a, 2009b, 2012). The method was designed to overcome the limitations such as the reliability of the expert-based evaluation methods inherent in the previous user-centered evaluation method (Gabbard, Hix, & Swan, 1999). The work provides a significant contribution towards a better understanding of the important aspects in VR training system efficiency and their influence on the end results of virtual training.
7. CONCLUSIONS AND RECOMMENDATIONS Studies have shown that haptic feedback can assist in the training of a wide range of motor skill tasks.
In order to be of practical use for cell injection training, a thorough investigation of the specific skills such as the ability to execute accurate trajectories, speeds, and forces is necessary. Determining these required skills needs to be in the context of a pragmatic system design otherwise it may not feasible for real-world training operations. Problems associated with skills acquisition and motor learning curves should be considered and any virtual training system developed should consider psychomotor and cognitive learning theories.
In order to develop an effective haptically-enabled virtual training system for cell injection, further research is required to carefully consider suitable commercially available hardware and devices in the context of the skills to be trained, or to some extent to upgrade, modify or develop new hardware. Given the acquisition of the appropriate haptic hardware, the techniques and methodologies for displaying haptic information need to be developed.
A portable cell injection training system may prove more useful in terms of access and time constraints. Therefore, utilizing portable platforms such as the reconfigurable multipurpose haptic interface (Horan et al., 2014) may be beneficial. The interface can provide several kinematic configurations (as discussed in Section 3). To optimize this capability further investigation on the integration of the interface with compatible applications is recommended. Our previous work, the virtual cell injection training environment (Faroque et al., 2015) and the 5-DOF haptic stylus (Isaksson et al., 2012) are applications which have already utilized the interface. Additionally, by mapping the orientation of the 5-DOF interface stylus to the orientation of the micropipette, as opposed to 3-DOF point-to-point mapping, more intuitive and realistic control can be realized.
As discussed earlier, there are three main approaches to incorporating haptic feedback to the user in terms of training and performance enhancement, i.e. virtual fixtures, record/replay and shared control. In developing a specific cell injection training system, the applicability of each of these approaches needs to be taken into account for determining which individual or combination of approaches is suitable for displaying haptic information to the trainee.
To develop a comprehensive haptically-enabled cell injection training system which includes cell specific haptic information, further research is recommended for developing a database of different cell biomechanical properties. This includes information relating to factors including types, shapes, sizes, subcellular locations, stiffness, viscosity and elasticity. The database should also include realistic images for visually representing the cells to trainees. The realization of such a database will enable the training system to call upon information pertaining to a particular cell type as required.

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 15
Despite the level of sophistication of a cell injection training system, its level of effectiveness in supporting skills acquisition and performance improvement is the most important characteristic pertaining to the usefulness of the system. For this reason it is suggested that a more specific method for evaluating the cell injection system by considering both the user-centered evaluation processes and outcomes as the one proposed by Jia, Bhatti, Nahavandi, and Horan (2012) be developed. Skills acquired through use of the haptically-enabled system need to be evaluated during real time procedures.
Overall, the works considered in this survey suggest that it is feasible to use haptic feedback for virtual cell injection training systems. The integration of haptic technology to the virtual training system will presumably provide extra guidance and realism to the system, thereby leading to better training outcomes. However, relevant problems have been identified and discussed and need to be mitigated when developing a haptically-enabled training system for cell injection.
REFERENCES 3D Systems Inc. (2015). Haptic Devices [Brochure]. Retrieved from
http://www.geomagic.com/files/6114/3940/9416/Haptic_Device_brochure-8-2015-final.pdf Abbott, J. J., Marayong, P., & Okamura, A. M. (2007). Haptic virtual fixtures for robot-assisted
manipulation. Robotics Research, 28, 49-64. doi: 10.1007/978-3-540-48113-3_5 Abe, N., Mizokami, R., Kinoshita, Y., & He, S. (2007). Providing simulation of medical manipulation with
haptic feedback. 17th International Conference on Artificial Reality and Telexistence, 143-148. doi: 10.1109/ICAT.2007.14
Ammi, M., & Ferreira, A. (2005). Realistic visual and haptic rendering for biological-cell Injection. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 918-923. doi: 10.1109/robot.2005.1570234
Ammi, M., Ladjal, H., & Ferreira, A. (2006). Evaluation of 3D pseudo-haptic rendering using vision for cell micromanipulation. Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2115-2120. doi: 10.1109/iros.2006.282490
Ang, Q.-Z., Horan, B., Najdovski, Z., & Nahavandi, S. (2011). Enabling multi-point haptic grasping in virtual environments. IEEE Symposium on 3D User Interfaces (3DUI), 55-58. doi: 10.1109/3DUI.2011.5759217
Arioui, H., Nehaoua, L., Hima, S., Seguy, N., & Espie, S. (2010). Mechatronics, design, and modeling of a motorcycle riding simulator. IEEE/ASME Transactions on Mechatronics, 15(5), 805-818. doi: 10.1109/tmech.2009.2035499
Asgari, M., Ghanbari, A., & Nahavandi, S. (2011). 3D particle-based cell modelling for haptic microrobotic cell injection. Proceedings of the 15th International Conference on Mechatronics Technology, 1-6.
Basdogan, C., De, S., Kim, J., Muniyandi, M., Kim, H., & Srinivasan, M. A. (2004). Haptics in minimally invasive surgical simulation and training. IEEE Computer Graphics and Applications, 24(2), 56-64. doi: 10.1109/mcg.2004.1274062
Bettini, A., Lang, S., Okamura, A., & Hager, G. (2002). Vision assisted control for manipulation using virtual fixtures: Experiments at macro and micro scales. Proceedings of the 2002 IEEE International Conference on Robotics & Automation, 4, 3354-3361 vol.3354. doi: 10.1109/robot.2002.1014229
Biggs, S. J., & Srinivasan, M. A. (2002). Haptic interfaces. In K. S. Hale & K. M. Stanney (Eds.), Handbook of virtual environments: Design, implementation, and applications (pp. 93-116). Boca Raton, FL: CRC Press.
Bilodeau, G. (1992). Regular pyramid punch problem. Journal of Applied Mechanics, 59(3), 519-523. doi: 10.1115/1.2893754
Blouin, F. (1999). U. S. Patent No. 5,977,867. U. S. Patent. Boey, S. K., Boal, D. H., & Discher, D. E. (1998). Simulations of the erythrocyte cytoskeleton at large
deformation. I. Microscopic models. Biophysical Journal, 75(3), 1573-1583. doi: 10.1016/s0006-3495(98)74075-5
Boroujeni, M. M., & Meghdari, A. (2009). Haptic device application in Persian calligraphy. International Conference on Computer and Automation Engineering, 160-164. doi: 10.1109/iccae.2009.55

16
Burgess, P. R., & Perl, E. R. (1973). Cutaneous mechanoreceptors and nociceptors. In A. Iggo (Ed.), Somatosensory system (Vol. 2, pp. 29-78). New York, NY: Springer Berlin Heidelberg.
Caille, N., Thoumine, O., Tardy, Y., & Meister, J.-J. (2002). Contribution of the nucleus to the mechanical properties of endothelial cells. Journal of Biomechanics, 35(2), 177-187. doi: 10.1016/s0021-9290(01)00201-9
Campbell, N. A., Williamson, B., & Heyden, R. J. (2006). Biology: Exploring life. Boston, MA: Pearson Prentice Hall.
Chen, J. Y. C., & Barnes, M. J. (2008). Robotics operator performance in a military multi-tasking environment. 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI), 279-286. doi: 10.1145/1349822.1349859
Cho, S.-Y., & Shim, J.-H. (2004). A new micro biological cell injection system. Proceedings of 2004 IEEE/RSJ lnternatlonal Conference on Intelligent Robots and Systems, 2, 1642-1647. doi: 10.1109/iros.2004.1389631
Cohen, M. H., & Grest, G. (1979). Liquid-glass transition, a free-volume approach. Physical Review B, 20(3), 1077-1098.
Coles, T. R., Meglan, D., & John, N. W. (2011). The role of haptics in medical training simulators: A survey of the state of the art. IEEE Transactions on Haptics, 4(1), 51-66. doi: 10.1109/toh.2010.19
Committee on Virtual Reality Research and Development Computer Science and Telecommunications Board National Research Council. (1994). Virtual reality: Scientific and technological challenges. Washington, DC: National Academies Press.
Coughlin, M. F., & Stamenović, D. (2003). A prestressed cable network model of the adherent cell cytoskeleton. Biophysical Journal, 84(2), 1328-1336. doi: 10.1016/s0006-3495(03)74948-0
Culbertson, H., Unwin, J., Goodman, B. E., & Kuchenbecker, K. J. (2013). Generating haptic texture models from unconstrained tool-surface interactions. World Haptics Conference (WHC), 2013, 295-300. doi: 10.1109/WHC.2013.6548424
CyberGlove Systems LLC. (2009). CyberTouchTM [Brochure]. Retrieved from http://static1.squarespace.com/static/559c381ee4b0ff7423b6b6a4/t/5602fbf3e4b07ebf58d4806a/1443036147885/CyberTouch_Brochure.pdf
Discher, D. E., Boal, D. H., & Boey, S. K. (1998). Simulations of the erythrocyte cytoskeleton at large deformation. II. Micropipette aspiration. Biophysical Journal, 75(3), 1584-1597. doi: 10.1016/s0006-3495(98)74076-7
Dong, C., Skalak, R., & Sung, K. P. (1991). Cytoplasmic rheology of passive neutrophils. Biorheology, 28(6), 557-567.
Dong, C., Skalak, R., Sung, K. P., Schmid-Schönbein, G. W., & Chien, S. (1988). Passive deformation analysis of human leukocytes. Journal of Biomechanical Engineering, 110(1), 27-36. doi: 10.1115/1.3108402
Embach, J. T. (1989). U. S. Patent No. 4,885,565. U. S. Patent. Fabry, B., Maksym, G. N., Butler, J. P., Glogauer, M., Navajas, D., & Fredberg, J. J. (2001). Scaling the
microrheology of living cells. Physical Review Letters, 87(14), 148102. Faroque, S., Horan, B., Adam, H., Pangestu, M., & Thomas, S. (2015). Haptic virtual reality training
environment for microrobotic cell injection. In H. Kajimoto, H. Ando & K.-U. Kyung (Eds.), Haptic interaction (Vol. 277, pp. 245-249). Tokyo: Springer Japan.
Fisch, A., Mavroidis, C., Melli-Huber, J., & Bar-Cohen, Y. (2003). Haptic devices for virtual reality, telepresence, and human-assistive robotics. In Y. Bar-Cohen & C. L. Breazeal (Eds.), Biologically inspired intelligent robots (pp. 73-102). Bellingham: SPIE Press.
Fitts, P. M. (1954). The information capacity of the human motor system in controlling the amplitude of movement. Journal of Experimental Psychology, 47(6), 381-391. doi: 10.1037/h0055392
Fitts, P. M., & Posner, M. (1967). Human performance. Oxford, UK: Brooks and Cole. Forgacs, G. (1995). On the possible role of cytoskeletal filamentous networks in intracellular signaling: An
approach based on percolation. Journal of Cell Science, 108(6), 2131-2143. Fu, Y.-j., Yuan, K., Du, Q.-x., & Song, W.-g. (2005). Development of a virtual surgery system with a
virtual scalpel. Proceedings of the 2005 IEEE International Conference on Information Acquisition, 253-257. doi: 10.1109/icia.2005.1635091

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 17
Fukuda, T., & Arai, F. (2000). Prototyping design and automation of micro/nano manipulation system. Proceedings ICRA '00. IEEE International Conference on Robotics and Automation, 1, 192-197. doi: 10.1109/ROBOT.2000.844058
Fuller, B. (1961). Tensegrity. In A. Frankfurter (Ed.), Portfolio Artnews Annual: No. 4 (pp. 112-127). New York, NY: Art Foundation Press.
Gabbard, J. L., Hix, D., & Swan, J. E. (1999). User-centered design and evaluation of virtual environments. Computer Graphics and Applications, IEEE, 19(6), 51-59. doi: 10.1109/38.799740
Ghanbari, A., Abdi, H., Horan, B., Nahavandi, S., Chen, X., & Wang, W. (2010). Haptic guidance for microrobotic intracellular injection. Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, 162-167. doi: 10.1109/biorob.2010.5627016
Ghanbari, A., Chen, X., & Wang, W. (2009). Neuro-fuzzy microrobotic system identification for haptic intracellular injection. 2009 IEEE International Conference on Control and Automation, 860-866. doi: 10.1109/icca.2009.5410444
Ghanbari, A., Chen, X., Wang, W., Horan, B., Abdi, H., & Nahavandi, S. (2010). Haptic microrobotic intracellular injection assistance using virtual fixtures. 2010 11th Int. Conf. Control, Automation, Robotics and Vision, 781-786. doi: 10.1109/icarcv.2010.5707390
Ghanbari, A., Horan, B., Nahavandi, S., Chen, X., & Wang, W. (2009). Towards haptic microrobotic intracellular injection. ASME/IEEE International Conference on Mechatronic and Embedded Systems and Applications, 3, 135-142. doi: 10.1115/DETC2009-87822
Ghanbari, A., Horan, B., Nahavandi, S., Chen, X., & Wang, W. (2012). Haptic microrobotic cell injection system. IEEE Systems Journal, 8, 371-383. doi: 10.1109/jsyst.2012.2206440
Ghanbari, A., Wang, W., Hann, C. E., Chase, J. G., & Chen, X. (2009). Cell image recognition and visual servo control for automated cell injection. Proceedings of the 4th International Conference on Autonomous Robots and Agents, 92-96. doi: 10.1109/icara.2000.4803986
Gibson, L. J., & Ashby, M. F. (1997). Cellular solids: Structure and properties (2nd ed.). Cambridge, UK: Cambridge University Press.
Godfrey, B. B., & Kephart, N. C. (1969). Movement patterns and motor education. New York: Appleton-Century-Crofts.
Goodwin, J. G., Isensee, S. H., Poston, R. L., & Tsao, I.-H. (2001). U. S. Patent No. US 6,218,966 B1. U. S. Patent.
Guilak, F., Haider, M. A., Setton, L. A., Laursen, T. A., & Baaijens, F. P. T. (2006). Multiphasic models of cell mechanics. In R. D. Kamm & M. K. Mofrad (Eds.), Cytoskeletal mechanics : Models and measurements (pp. 84-102). Cambridge, NY: Cambridge University Press.
Guilak, F., Tedrow, J. R., & Burgkart, R. (2000). Viscoelastic properties of the cell nucleus. Biochemical and Biophysical Research Communications, 269(3), 781-786. doi: 10.1006/bbrc.2000.2360
Hansen, J. C., Skalak, R., Chien, S., & Hoger, A. (1997). Influence of network topology on the elasticity of the red blood cell membrane skeleton. Biophysical Journal, 72(5), 2369-2381. doi: 10.1016/S0006-3495(97)78882-9
Hayward, V., & Astley, O. R. (1996). Performance measures for haptic interfaces. In G. Giralt & G. Hirzinger (Eds.), Robotics research: The 7th International Symposium (pp. 195-207). London: Springer London.
Hayward, V., Astley, O. R., Cruz-Hernandez, M., Grant, D., & Robles-De-La-Torre, G. (2004). Haptic interfaces and devices. Sensor Review, 24(1), 16-29. doi: 10.1108/02602280410515770
Hirose, M., Hirota, K., Ogi, T., Yano, H., Kakehi, N., Saito, M., & Nakashige, M. (2001). HapticGEAR: The development of a wearable force display system for immersive projection displays. Proceedings of the Virtual Reality 2001 Conference (VR'01) 123-129. doi: 10.1109/VR.2001.913778
Hochmuth, R. M. (2000). Micropipette aspiration of living cells. Journal of Biomechanics, 33(1), 15-22. doi: 10.1016/S0021-9290(99)00175-X
Hochmuth, R. M., Ting-Beall, H. P., Beaty, B. B., Needham, D., & Tran-Son-Tay, R. (1993). Viscosity of passive human neutrophils undergoing small deformations. Biophysical Journal, 64(5), 1596-1601. doi: 10.1016/s0006-3495(93)81530-3

18
Horan, B., Faroque, S., Isaksson, M., & Ang, Q.-Z. (2014). Reconfigurable multipurpose haptic interface. In M. Auvray & C. Duriez (Eds.), Haptics: Neuroscience, devices, modeling, and applications (Vol. 8619, pp. 432-434). Berlin: Springer Berlin Heidelberg.
Horan, B., Lowe, D., Ang, Q.-Z., Asgari, M., Ghanbari, A., & Nahavandi, S. (2011). Virtual haptic cell model for operator training. Proceedings of the 15th International Conference on Mechatronics Technology, 1-5.
Huang, H., Sun, D., Mills, J. K., & Li, W. J. (2006). A visual impedance force control of a robotic cell injection system. Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, 233-238. doi: 10.1109/robio.2006.340159
Huang, H., Sun, D., Mills, J. K., Li, W. J., & Cheng, S. H. (2009). Visual-Based impedance control of out-of-plane cell injection systems. IEEE Transactions on Automation Science and Engineering, 6(3), 565-571. doi: 10.1109/TASE.2008.2010013
Huang, P. Y., Kunkel, J. A., Brindza, J., & Kuchenbecker, K. J. (2011). Haptically assisted golf putting through a planar four-cable system. IEEE World Haptics Conference 2011, 191-196. doi: 10.1109/whc.2011.5945484
Huegel, J. C., & O'Malley, M. K. (2009). Visual versus haptic progressive guidance for training in a virtual dynamic task. Third Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 399-400. doi: 10.1109/whc.2009.4810914
Ingber, D. E. (1993). Cellular tensegrity: Defining new rules of biological design that govern the cytoskeleton. Journal of Cell Science, 104, 613-613.
Ingber, D. E., & Jamieson, J. D. (1985). Cells as tensegrity structures: Architectural regulation of histodifferentiation by physical forces transduced over basement membrane. In L. C. Andersson, C. G. Gahmberg & P. Ekblom (Eds.), Gene expression during normal and malignant differentiation (pp. 13-32). Orlando, FL: Academic Press.
Isaksson, M., Horan, B., & Nahavandi, S. (2012). Low-cost 5-DOF haptic stylus interaction using two phantom omni devices. In M. Auvray & C. Duriez (Eds.), Haptics: Neuroscience, devices, modeling, and applications (pp. 139-149). Berlin: Springer Berlin Heidelberg.
Iwata, H., & Nakagawa, H. (1998). Wearable force feedback joystick. Human Interface N&R, 13(2), 135-138.
Jia, D., Bhatti, A., Mawson, C., & Nahavandi, S. (2009). User-centered evaluation of a virtual environment training system: Utility of user perception measures. In R. Shumaker (Ed.), Virtual and mixed reality (Vol. 5622, pp. 196-205). Berlin: Springer Berlin Heidelberg.
Jia, D., Bhatti, A., & Nahavandi, S. (2009a). Design and evaluation of a haptically enable virtual environment for object assembly training. IEEE International Workshop on Haptic Audio visual Environments and Games, 75-80. doi: 10.1109/HAVE.2009.5356130
Jia, D., Bhatti, A., & Nahavandi, S. (2009b). MUSTe method for quantifying virtual environment training system efficacy. Proceedings of the 21st Annual Conference of the Australian Computer-Human Interaction, 305-308. doi: 10.1145/1738826.1738881
Jia, D., Bhatti, A., & Nahavandi, S. (2012). The impact of self-efficacy and perceived system efficacy on effectiveness of virtual training systems. Behaviour & Information Technology, 33(1), 16-35. doi: 10.1080/0144929X.2012.681067
Jia, D., Bhatti, A., Nahavandi, S., & Horan, B. (2012). Human performance measures for interactive haptic-audio-visual interfaces. IEEE Transactions on Haptics, 6(1), 46-57. doi: 10.1109/toh.2012.41
Johnson, K. (2002). Neural basis of haptic perception. In H. Pashler, S. Yantis, D. Medin, R. Gallistel & J. Wixted (Eds.), Stevens' Handbook of Experimental Psychology: John Wiley & Sons, Inc.
Jones, M. G., Andre, T., Superfine, R., & Taylor, R. (2003). Learning at the nanoscale: The impact of students' use of remote microscopy on concepts of viruses, scale, and microscopy. Journal of Research in Science Teaching, 40(3), 303-322. doi: 10.1002/tea.10078
Jones, W. R., Ping Ting-Beall, H., Lee, G. M., Kelley, S. S., Hochmuth, R. M., & Guilak, F. (1999). Alterations in the Young’s modulus and volumetric properties of chondrocytes isolated from normal and osteoarthritic human cartilage. Journal of Biomechanics, 32(2), 119-127. doi: 10.1016/s0021-9290(98)00166-3
Kasaya, T., Miyazaki, H., Saito, S., & Sato, T. (1999). Micro object handling under SEM by vision-based automatic control. Proceedings of the 1999 IEEE International Conference on Robotics & Automation, 3, 2189-2196. doi: 10.1109/robot.1999.770431

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 19
Kim, D.-H., Kim, B., Yun, S., & Kwon, S. (2004). Cellular force measurement for force reflected biomanipulation. Proceedings of the 2004 IEEE International Conference on Robotics & Automation, 3, 2412-2417. doi: 10.1109/robot.2004.1307422
Kim, D.-H., Yun, S., & Kim, B. (2004). Mechanical force response of single living cells using a microrobotic system. Proceedings of the 2004 IEEE International Conference on Robotics & Automation, 5, 5013-5018. doi: 10.1109/robot.2004.1302512
Kim, Y., Duric, Z., Gerber, N. L., Palsbo, A. R., & Palsbo, S. E. (2009). Poster: Teaching letter writing using a programmable haptic device interface for children with handwriting difficulties. IEEE Symposium on 3D User Interfaces, 145-146. doi: 10.1109/3dui.2009.4811228
Kuang, A. B., Payandeh, S., Zheng, B., Henigman, F., & MacKenzie, C. L. (2004). Assembling virtual fixtures for guidance in training environments. Proceedings of the 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS’04), 367-374. doi: 10.1109/haptic.2004.1287223
Kuncova, J., & Kallio, P. (2004). Challenges in capillary pressure microinjection. Proceedings of the 26th Annual International Conference of the IEEE EMBS, 2, 4998-5001. doi: 10.1109/iembs.2004.1404381
Ladjal, H., Hanus, J.-L., & Ferreira, A. (2008a). Interactive cell injection simulation based on 3D biomechanical tensegrity model. 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2296-2302. doi: 10.1109/iros.2008.4650973
Ladjal, H., Hanus, J.-L., & Ferreira, A. (2008b). Methodologies of dynamic cell injection techniques using FEM biomechanical modeling. Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 631-636. doi: 10.1109/biorob.2008.4762805
Ladjal, H., Hanus, J.-L., & Ferreira, A. (2011). Microrobotic simulator for assisted biological cell injection. 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1315-1320. doi: 10.1109/iros.2011.6094965
Ladjal, H., Hanus, J.-L., Pillarisetti, A., Keefer, C., Ferreira, A., & Desai, J. P. (2012). Reality-based real-time cell indentation simulator. IEEE/ASME Transactions on Mechatronics, 17(2), 239-250. doi: 10.1109/TMECH.2010.2091010
Lai, W. M., Hou, J. S., & Mow, V. C. (1991). A triphasic theory for the swelling and deformation behaviors of articular cartilage. Journal of Biomechanical Engineering, 113(3), 245-258.
Le, V. T., Nahavandi, S., & Creighton, D. (2010). A haptic training environment for the heart myoblast cell injection procedure. 11th International Conference on Control Automation Robotics & Vision (ICARCV), 448-452. doi: 10.1109/ICARCV.2010.5707421
Lee, J. C. M., Wong, D. T., & Discher, D. E. (1999). Direct measures of large, anisotropic strains in deformation of the erythrocyte cytoskeleton. Biophysical Journal, 77(2), 853-864. doi: 10.1016/s0006-3495(99)76937-7
Li, Y., Huegel, J. C., Patoglu, V., & O'Malley, M. K. (2009). Progressive shared control for training in virtual environments. Third Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 332-337. doi: 10.1109/whc.2009.4810873
Li, Y., Patoglu, V., & O'Malley, M. K. (2009). Negative efficacy of fixed gain error reducing shared control for training in virtual environments. ACM Transactions on Applied Perception (TAP), 6(1), 3:1-3:21. doi: 10.1145/1462055.1462058
Lim, C. T., Zhou, E. H., & Quek, S. T. (2006). Mechanical models for living cells - A review. Journal of Biomechanics, 39(2), 195-216. doi: 10.1016/j.jbiomech.2004.12.008
Liu, G., & Lu, K. (2011). Networked tank gunnery skill training based on haptic interaction. 2011 4th International Conference on Biomedical Engineering and Informatics (BMEI), 4, 2220-2224. doi: 10.1109/bmei.2011.6098650
Lu, K., Liu, G., Zhang, Y., Guo, W., & Zhou, M. (2010). Two-mode system for tank gunnery skill training based on haptic interaction. Proceedings of the 2010 IEEE International Conference on Mechatronics and Automation, 1449-1453. doi: 10.1109/icma.2010.5588998
Lu, Z., Zhang, X., Leung, C., Esfandiari, N., Casper, R. F., & Sun, Y. (2011). Robotic ICSI (Intracytoplasmic Sperm Injection). IEEE Transactions on Biomedical Engineering, 58(7), 2102-2108. doi: 10.1109/tbme.2011.2146781

20
Luo, Q., & Xiao, J. (2006). Haptic simulation for micro/nano-scale optical fiber assembly. IEEE/RSJ International Conference on Intelligent Robots and Systems, 1353-1358. doi: 10.1109/IROS.2006.281922
Maniotis, A. J., Chen, C. S., & Ingber, D. E. (1997). Demonstration of mechanical connections between integrins, cytoskeletal filaments, and nucleoplasm that stabilize nuclear structure. Proceedings of the National Academy of Sciences, 94(3), 849-854. doi: 10.1073/pnas.94.3.849
Marayong, P., Bettini, A., & Okamura, A. (2002). Effect of virtual fixture compliance on human-machine cooperative manipulation. Proceedings of the 2002 IEEWRSJ Intl. Conference on Intelligent Robots and Systems, 2, 1089-1095. doi: 10.1109/irds.2002.1043876
Marchi, F., Urma, D., Marliere, S., Florens, J.-L., Besancon, A., Chevalier, J., & Luciani, A. (2005). Educational tool for nanophysics using multisensory rendering. Proceedings of the WorldHaptics 2005 Conference, 1-8. doi: 10.1109/WHC.2005.45
McDonald, C. G., & Kuchenbecker, K. J. (2013). Dynamic simulation of tool-mediated texture interaction. World Haptics Conference (WHC), 2013, 307-312. doi: 10.1109/WHC.2013.6548426
Menciassi, A., Eisinberg, A., Izzo, I., & Dario, P. (2004). From "macro" to "micro" manipulation: models and experiments. Mechatronics, IEEE/ASME Transactions on, 9(2), 311-320. doi: 10.1109/TMECH.2004.828657
Michel, O. (2004). WebotsTM: Professional mobile robot simulation. International Journal of Advanced Robotic Systems, 1, 39-42.
Mijailovich, S. M., Kojic, M., Zivkovic, M., Fabry, B., & Fredberg, J. J. (2002). A finite element model of cell deformation during magnetic bead twisting. Journal of Applied Physiology, 93(4), 1429-1436. doi: 10.1152/japplphysiol.00255.2002
Minogue, J., Jones, M. G., Broadwell, B., & Oppewall, T. (2006). The impact of haptic augmentation on middle school students’ conceptions of the animal cell. Virtual Reality, 10(3-4), 293-305. doi: 10.1007/s10055-006-0052-4
Mow, V. C., Holmes, M. H., & Lai, W. M. (1984). Fluid transport and mechanical properties of articular cartilage: A review. Journal of Biomechanics, 17(5), 377-394. doi: 10.1016/0021-9290(84)90031-9
Mow, V. C., Kuei, S. C., Lai, W. M., & Armstrong, C. G. (1980). Biphasic creep and stress relaxation of articular cartilage in compression? Theory and experiments. Journal of Biomechanical Engineering, 102(1), 73-84. doi: 10.1115/1.3138202
Murray, A. M., Klatzky, R. L., & Khosla, P. K. (2003). Psychophysical characterization and testbed validation of a wearable vibrotactile glove for telemanipulation. Presence: Teleoperators and Virtual Environments, 12(2), 156-182. doi: 10.1162/105474603321640923
Needham, D., & Hochmuth, R. M. (1992). A sensitive measure of surface stress in the resting neutrophil. Biophysical Journal, 61(6), 1664-1670. doi: 10.1016/s0006-3495(92)81970-7
Niemeyer, G., Kuchenbecker, K. J., Bonneau, R., Mitra, P., Reid, A. M., Fiene, J., & Weldon, G. (2004). THUMP: An immersive haptic console for surgical simulation and training. In J. D. Westwood (Ed.), Medicine meets virtual reality 12 (Vol. 98, pp. 272-274). Amsterdam, The Netherlands: IOS Press.
Nishino, H., Murayama, K., Kagawa, T., & Utsumiya, K. (2010). A Japanese calligraphy trainer based on skill acquisition through haptization. 2010 24th IEEE International Conference on Advanced Information Networking and Applications, 1225-1232. doi: 10.1109/aina.2010.112
Nudehi, S. S., Mukherjee, R., & Ghodoussi, M. (2003). A haptic interface design for minimally invasive telesurgical training and collaboration in the presence of time delay. Proceedings of the 42nd IEEE Conference on Decision and Control, 5, 4563-4568 Vol.4565. doi: 10.1109/cdc.2003.1272274
O'Malley, M. K., & Gupta, A. (2003a). Passive and active assistance for human performance of a simulated underactuated dynamic task. Proceedings of the 11th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (HAPTICS’03), 348-355. doi: 10.1109/HAPTIC.2003.1191308
O'Malley, M. K., & Gupta, A. (2003b). Skill transfer in a simulated underactuated dynamic task. Proceedings of the 2003 IEEE lnternational Workshop on Robot and Human Interactive Communication, 315-320. doi: 10.1109/roman.2003.1251864

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 21
O'Malley, M. K., Gupta, A., Gen, M., & Li, Y. (2006). Shared control in haptics systems for performance enhancement and training. Journal of Dynamic Systems, Measurement, and Control, 128, 75-85. doi: 10.1115/1.2168160
Paley, W. B. (1994). U. S. Patent No. 5,296,871. U. S. Patent. Palluel-Germain, R., Bara, F., Hillairet de Boisferon, A., Hennion, B., Gouagout, P., & Gentaz, E. (2007).
A visuo-haptic device - telemaque - increases kindergarten children's handwriting acquisition. Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'07), 72-77. doi: 10.1109/whc.2007.13
Payandeh, S., & Stanisic, Z. (2002). On application of virtual fixtures as an aid for telemanipulation and training. Proceedings of the 10th Symp. On Haptic Interfaces For Virtual Envir. & Teleoperator Systs. (HAPTICS'02), 18-23. doi: 10.1109/haptic.2002.998936
Persson, P. B., Cooper, M. D., Tibell, L. A. E., Ainsworth, S., Ynnerman, A., & Jonsson, B. H. (2007). Designing and evaluating a haptic system for biomolecular education. IEEE Virtual Reality Conference, VR '07., 171-178. doi: 10.1109/VR.2007.352478
Peterlik, I., Nouicer, M., Duriez, C., Cotin, S., & Kheddar, A. (2011). Constraint-based haptic rendering of multirate compliant mechanisms. IEEE Transactions on Haptics, 4(3), 175-187. doi: 10.1109/toh.2011.41
Petersen, N. O., McConnaughey, W. B., & Elson, E. L. (1982). Dependence of locally measured cellular deformability on position on the cell, temperature, and cytochalasin B. Proceedings of the National Academy of Sciences, 79(17), 5327-5331. doi: 10.1073/pnas.79.17.5327
Pillarisetti, A., Anjum, W., Desai, J. P., Friedman, G., & Brooks, A. D. (2005). Force feedback interface for cell injection. Proceedings of the First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 391-400. doi: 10.1109/whc.2005.57
Pillarisetti, A., Pekarev, M., Brooks, A. D., & Desai, J. P. (2006). Evaluating the role of force feedback for biomanipulation tasks. Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 11-18. doi: 10.1109/haptic.2006.1627080
Pocheville, A., Kheddar, A., & Yokoi, K. (2004). I-TOUCH: A generic multimodal framework for industry virtual prototyping. First IEEE Technical Exhibition Based Conference on Robotics and Automation, TExCRA '04, 65-66. doi: 10.1109/TEXCRA.2004.1425000
Ricciardi, S., Nappi, M., Paolino, L., Sebillo, M., Vitiello, G., Gigante, G., . . . Vozella, A. (2010). Dependability issues in visual–haptic interfaces. Journal of Visual Languages & Computing, 21(1), 33-40. doi: 10.1016/j.jvlc.2009.07.001
Romano, J. M., & Kuchenbecker, K. J. (2012). Creating realistic virtual textures from contact acceleration data. IEEE Transactions on Haptics, 5(2), 109-119. doi: 10.1109/TOH.2011.38
Rosenberg, L. B. (1992). The use of virtual fixtures as perceptual overlays to enhance operator performance in remote environments. Stanford CA: Center for Design Research, Stanford University.
Rosenberg, L. B. (1993a). The use of virtual fixtures to enhance operator performance in time delayed teleoperation. Stanford CA: Center for Design Research, Stanford University.
Rosenberg, L. B. (1993b). Virtual fixtures: Perceptual tools for telerobotic manipulation. 1993 IEEE Virtual Reality Annual International Symposium, 76-82. doi: 10.1109/vrais.1993.380795
Ruffaldi, E., Filippeschi, A., Frisoli, A., Sandoval, O., Avizzano, C. A., & Bergamasco, M. (2009). Vibrotactile perception assessment for a rowing training system. Third Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, 350-355. doi: 10.1109/whc.2009.4810849
Ruffaldi, E., Morris, D., Edmunds, T., Barbagli, F., & Pai, D. K. (2006). Standardized evaluation of haptic rendering systems. 14th Symposium onHaptic Interfaces for Virtual Environment and Teleoperator Systems, 2006, 225-232. doi: 10.1109/HAPTIC.2006.1627081
Saddik, A. E., Orozco, M., Eid, M., & Cha, J. (2011). Haptics technologies: Bringing touch to multimedia. Berlin: Springer-Verlag, Berlin Heidelberg.
Samur, E., Wang, F., Spaelter, U., & Bleuler, H. (2007). Generic and systematic evaluation of haptic interfaces based on testbeds. IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2007, 2113-2119. doi: 10.1109/IROS.2007.4399522
Satcher Jr, R. L., & Dewey Jr, C. F. (1996). Theoretical estimates of mechanical properties of the endothelial cell cytoskeleton. Biophysical Journal, 71(1), 109-118. doi: 10.1016/s0006-3495(96)79206-8

22
Schmid-Schönbein, G. W., Sung, K. L., Tözeren, H., Skalak, R., & Chien, S. (1981). Passive mechanical properties of human leukocytes. Biophysical Journal, 36(1), 243-256. doi: 10.1016/s0006-3495(81)84726-1
Sewell, C., Blevins, N. H., Peddamatham, S., Tan, H. Z., Morris, D., & Salisbury, K. (2007). The effect of virtual haptic training on real surgical drilling proficiency. Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'07), 601-603. doi: 10.1109/whc.2007.111
Shah, A. V., Teuscher, S., McClain, E. W., & Abbott, J. J. (2010). How to build an inexpensive 5-DOF haptic device using two Novint Falcons. In A. M. L. Kappers, J. B. F. Erp, W. M. Bergmann Tiest & F. C. T. Helm (Eds.), Haptics: Generating and perceiving tangible sensations (Vol. 6191, pp. 136-143). Berlin: Springer Berlin Heidelberg.
Shen, X., Zhou, J., Hamam, A., Nourian, S., El-Far, N. R., Malric, F., & Georganas, N. D. (2008). Haptic-enabled telementoring surgery simulation. IEEE Multimedia, 15(1), 64-76. doi: 10.1109/mmul.2008.9
Shuto, K., Nishino, H., Kagawa, T., & Utsumiya, K. (2009). A handwritten character training system with haptization of instructor's brush-strokes. International Conference on Complex, Intelligent and Software Intensive Systems, 1030-1035. doi: 10.1109/cisis.2009.140
Solis, J., Avizzano, C. A., & Bergamasco, M. (2003). Validating a skill transfer system based on reactive robots technology. Proceedings of the 2003 IEEE International Workshop on Robot and Human Interactive Communication, 175-180. doi: 10.1109/roman.2003.1251841
Sourina, O., Torres, J., & Wang, J. (2008). Visual haptic-based biomolecular docking. International Conference on Cyberworlds, 2008 240-247. doi: 10.1109/CW.2008.77
Stamenović, D. (2006). Models of cytoskeletal mechanics based on tensegrity. In R. D. Kamm & M. K. Mofrad (Eds.), Cytoskeletal mechanics : Models and measurements (pp. 103-128). Cambridge, NY: Cambridge University Press.
Stone, R. J. (2001). Haptic feedback: A brief history from telepresence to virtual reality. In S. Brewster & R. Murray-Smith (Eds.), Haptic human-computer interaction (Vol. 2058, pp. 1-16). Berlin: Springer Berlin Heidelberg.
Sun, Y., & Nelson, B. J. (2002). Biological cell injection using an autonomous microrobotic system. The International Journal of Robotics Research, 21(10-11), 861-868. doi: 10.1177/0278364902021010833
Sutcliffe, A., Gault, B., & Shin, J.-E. (2005). Presence, memory and interaction in virtual environments. International Journal of Human-Computer Studies, 62(3), 307-327. doi: 10.1016/j.ijhcs.2004.11.010
Takhmar, A. (2014). Control of cooperative haptics-enabled teleoperation systems with application to minimally invasive surgery (Doctor of Philosophy). University of Western Ontario, Canada.
Tam, D., MacLean, K. E., McGrenere, J., & Kuchenbecker, K. J. (2013). The design and field observation of a haptic notification system for timing awareness during oral presentations. Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, 1689-1698. doi: 10.1145/2470654.2466223
Theret, D. P., Levesque, M. J., Sato, M., Nerem, R. M., & Wheeler, L. T. (1988). The application of a homogeneous half-space model in the analysis of endothelial cell micropipette measurements. Journal of Biomechanical Engineering, 110(3), 190-199. doi: 10.1115/1.3108430
Thoumine, O., Cardoso, O., & Meister, J.-J. (1999). Changes in the mechanical properties of fibroblasts during spreading: a micromanipulation study. European Biophysics Journal, 28(3), 222-234. doi: 10.1007/s002490050203
Tokuyasu, T., Kitamura, T., Sakaguchi, G., & Komeda, M. (2003). Development of training system for left ventricular plastic surgery. IEEE EMBS Asian-Pacific Conference on Biomedical Engineering, 60-61. doi: 10.1109/apbme.2003.1302583
Tözeren, A., Mackie, L. H., Lawrence, M. B., Chan, P. Y., Dustin, M. L., & Springer, T. A. (1992). Micromanipulation of adhesion of phorbol 12-myristate-13-acetate-stimulated T lymphocytes to planar membranes containing intercellular adhesion molecule-1. Biophysical Journal, 63(1), 247-258. doi: 10.1016/s0006-3495(92)81578-3

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 23
Tran-Son-Tay, R., Needham, D., Yeung, A., & Hochmuth, R. M. (1991). Time-dependent recovery of passive neutrophils after large deformation. Biophysical Journal, 60(4), 856-866. doi: 10.1016/s0006-3495(91)82119-1
Tsai, M. A., Frank, R. S., & Waugh, R. E. (1993). Passive mechanical behavior of human neutrophils: Power-law fluid. Biophysical Journal, 65(5), 2078-2088. doi: 10.1016/s0006-3495(93)81238-4
Tse, B., Harwin, W., Barrow, A., Quinn, B., San Diego, J., & Cox, M. (2010). Design and development of a haptic dental training system - hapTEL. In A. M. L. Kappers, J. B. F. van Erp, W. M. Bergmann Tiest & F. C. T. van der Helm (Eds.), Haptics: Generating and perceiving tangible sensations (Vol. 6192, pp. 101-108). Berlin: Springer Berlin Heidelberg.
Turro, N., Khatib, O., & Coste-Maniere, E. (2001). Haptically augmented teleoperation. Proceedings ICRA IEEE International Conference on Robotics and Automation, 2001, 1, 386-392. doi: 10.1109/ROBOT.2001.932582
Wang, D., Zhang, Y., & Yao, C. (2006). Machine-mediated motor skill training method in haptic-enabled chinese handwriting simulation system. Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5644-5649. doi: 10.1109/iros.2006.282363
Wang, W., Hewett, D., Hann, C. E., Chase, J. G., & Chen, X. (2008). Machine vision and image processing for automated cell injection. IEEE/ASME International Conference on Mechtronic and Embedded Systems and Applications, 309-314. doi: 10.1109/mesa.2008.4735751
Wang, W., Liu, X., & Sun, Y. (2009). High-throughput automated injection of individual biological cells. IEEE Transactions on Automation Science and Engineering, 6(2), 209-219. doi: 10.1109/tase.2008.917136
Wang, W., Sun, Y., Zhang, M., Anderson, R., Langille, L., & Chan, W. (2008). A system for high-speed microinjection of adherent cells. Review of Scientific Instruments, 79(10), 104302. doi: 10.1063/1.3006000
Wang, X., Seet, G. G. L., Lau, M. W. S., Low, E., & Tan, K. C. (2000). Exploiting force feedback in pilot training and control of an underwater robotics vehicle: An implementation in LabVIEW. OCEANS 2000 MTS/IEEE Conference and Exhibition, 3, 2037-2042. doi: 10.1109/oceans.2000.882239
Wu, J., Wang, D., & Zhang, Y. (2009). Virtual fixture based haptic rendering of handwriting. IEEE International Conference on Virtual Environments, Human-Computer Interfaces and Measurements Systems VECIMS '09, 16-21. doi: 10.1109/vecims.2009.5068858
Xie, Y., Pheng, A. H., Zhang, J., Liu, P., Zhu, T., & Li, J. (2011). A simulation system for training telerobotic spine surgery. 2011 International Conference on Electric Information and Control Engineering (ICEICE), 102-105. doi: 10.1109/iceice.2011.5778101
Yaacoub, F., Hamam, Y., & Abche, A. (2008). Computer-based training system for simulating wrist arthroscopy. 21st IEEE International Symposium on Computer-Based Medical Systems, 421-423. doi: 10.1109/cbms.2008.67
Yang, X.-D., Bischof, W. F., & Boulanger, P. (2008). Validating the performance of haptic motor skill training. Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems, 129-135. doi: 10.1109/haptics.2008.4479929
Yeung, A., & Evans, E. (1989). Cortical shell-liquid core model for passive flow of liquid-like spherical cells into micropipets. Biophysical Journal, 56(1), 139-149. doi: 10.1016/s0006-3495(89)82659-1
Yokokohji, Y., Hollis, R. L., Kanade, T., Henmi, K., & Yoshikawa, T. (1996). Toward machine mediated training of motor skills. Skill transfer from human to human via virtual environment. IEEE International Workshop on Robot and Human Communication, 32-37. doi: 10.1109/roman.1996.568646
Zhang, Y., Han, M., Shee, C. Y., Ang, W. T., & Chia, T. F. (2007). Automatic vision guided small cell injection: Feature detection, positioning, penetration and injection. Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, 2518-2523. doi: 10.1109/icma.2007.4303952
Zhelev, D. V., Needham, D., & Hochmuth, R. M. (1994). Role of the membrane cortex in neutrophil deformation in small pipets. Biophysical Journal, 67(2), 696-705. doi: 10.1016/S0006-3495(94)80529-6

24
NOTES ON CONTRIBUTORS
Syafizwan Faroque is a PhD student within the School of Engineering, Deakin University, Australia. His research is concerned with the utilization of haptic technology in providing skill training. His research is funded by the Ministry of Education Malaysia.
Ben Horan the Director of the CADET VR Lab and the Course Director of Bachelor of Mechatronics Engineering within the School of Engineering, Deakin University, Australia. His current research interests include haptic human robotic interaction, haptic device design and mobile robotics.
Husaini Adam received B.Sc. in Electrical Engineering and M. Ed. both from University Technology of Malaysia in 1996 and 1998. He is a Senior Lecturer at Seberang Perai Polytechnic, Malaysia and currently a PhD student at Deakin University, Australia. His research study is sponsored by Ministry of Education Malaysia.

Haptic Technology for Micro-robotic Cell Injection Training Systems – A Review 25
Mulyoto Pangestu is a lecturer in Clinical Embryology and laboratory manager at Department of Obstetrics and Gynaecology, Monash University. He obtained his Bachelor in Animal Science from Jenderal Soedirman University Indonesia, and continued his Master and PhD at Monash University. His research interests are embryo manipulation and cryopreservation in human and animal. He trains Monash’s Clinical Embryology students in embryo handling, preservation and micromanipulation. He also retains his lecturer position at Jenderal Soedirman University Indonesia and develops many collaborations with other universities in Indonesia. Mulyoto is also actively assisting few infertility clinics in Indonesia to improve their services.
Matthew Joordens began his career with Industrial Control Technology designing control systems to automate various different industrial processes. For 5 years he designed microprocessor based control systems for companies such as Ford, Pilkington Glass, Webtek and Blue Circle Southern Cement. He then moved to Deakin University and wrote their first electronics units. Using his industrial experience he designed one of the first Australian Engineering degrees in Mechatronics that still runs at Deakin as Mechatronics and Robotics. He currently lectures units in Digital Electronics, Microcontrollers, Robotics and Artificial Intelligence after 20 years at Deakin. His general research areas of interest are; macro, nano and swarm robotics, surface and underwater robotics, industrial control and haptics.

![NormalTouch and TextureTouch: High-fidelity 3D Haptic Shape … · 2018. 1. 4. · Haptic Master [34], Virtuose 6D [13], Falcon [26], Snake Charmer [2]). More recently, a robotic](https://img.pdfslide.us/doc/110x75/60afa0ccd5f50d6ccc4e524c/normaltouch-and-texturetouch-high-fidelity-3d-haptic-shape-2018-1-4-haptic.jpg)


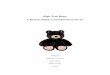










![Intelligent Precision Control for Haptic Microrobotic Cell Injection … · 2013-11-25 · mobile robotic teleportation [Horan et al., 2008a; Horan et al., 2008b], and medical simulation](https://img.pdfslide.us/doc/110x75/5f6f6cc98c9f3c78cf6c184f/intelligent-precision-control-for-haptic-microrobotic-cell-injection-2013-11-25.jpg)