Embed Size (px)
Citation preview
EECS 498
MAIZE TEAM
Edward Chakmakian, Kurt Lundeen, Daniel Morizio, Deepak Sharma
Project 1: Final Report
“PP for P-Day”

CONTENT
1. Background
1.1. Project Introduction
1.2. Equipment Involved
1.2.1. Computer Vision System
1.2.2. Dynamixel RX-64 and EX-106 Servo Motors
1.3. Design brainstorming
1.3.1. Hardware
1.3.1.1. Walker Robot
1.3.1.2. Crane Robot
1.3.1.3. Adaptation to Red teams (2014) Project 0 robot
1.3.1.4. Revolute-Revolute Manipulator Robot
1.3.1.5. Prismatic-Prismatic Robot
1.3.2. Software
2. Implementation
2.1. Initial Concept
2.2. Robot Design and Construction
2.3. Design Considerations
2.3.1. Sources of Error
2.3.2. Re-evaluation and Modifications
2.4. Motion Algorithm
2.4.1. Robot
2.4.2. Manual Controller
2.4.3. Autonomous Controller
3. Expected Performance
3.1. Modelling Software
3.2. Calibration and Modification
4. Results
4.1. P-Day Results
4.2. Observations
5. Discussion
5.1. Discussion of Other Teams
5.2. Reflection on Current Design
5.2.1. Mechanical Design
5.2.2. Software
5.3. Future Modifications
5.3.1. Mechanical Design
5.3.2. Software
6. References
7. Appendix

1. Background
1.1 Project Introduction
The project task is to develop a robot which could reach a sequence of waypoint
tags in a specific order while always pointing a laser mounted on the robot in +y
direction (red line as shown in Figure 1 (Fig. 1)).
Figure 1: Schematic diagram of the 2D tags (grey boxes) and robot with red laser in the
arena.
The details of the project (as discussed in Project 1 Task Specification file [1]) is
mentioned the following four points:
● Trajectory defined by waypoints: The four waypoints enveloped by the corner
tags (as shown in Fig. 1) define the overall path that robot has to take to
complete the task. The location of a waypoint, indicated by tag, is the centroid of
the corners recovered by the vision system. The robot also carries a tag, which
defines the location of the robot. A waypoint is reached when the center of the

robot tag is within the tag diameter of the waypoint tag on the plane of the
waypoint.
● Simulated sensor readings: The project also includes an optional aid provided
by the vision system to help with the navigation of the bot. The vision system
simulates two sensors (cyan and magenta circle markers in Fig. 1). It measures
the perpendicular distance between each sensor and the line segment
connecting previous and next waypoint (tag). If these perpendicular distances fall
outside the segment between the waypoints, or the sensor is too far away from
the line segment, the sensor value is 0.
● Information available to robot: Messages are sent to the robot controller when
the robot tag is observed. This message contains two sets of data. First, the
sensor measurements (as discussed above) in form of a dictionary of key-value
pairs, where keys ‘f’ and ‘b’ indicate the “front” and “back” sensors and have 8-bit
values. Second is the waypoint information; which consists of key ‘w’, which is
part of the aforementioned dictionary, containing a list of waypoints with each
waypoint containing two integers (global x and y coordinates of waypoints). The
waypoints list is sent periodically and when a waypoint is reached. The list keeps
on reducing as the waypoints are reached. Before P-Day trials, coordinates of
four corners of the arena will be given to make safety checks of keeping robot in
the arena. Also, apart from the arena dimensions, another important
measurement consideration is to keep the laser dot projected on the whiteboard
at a distance of at least 25 cm above arena.
● Objective and Pass-Fail criterion: On P-Day, teams will be given 15 minutes to
transverse the waypoints and will be scored on the basis of the RMS (root-of-
mean-of-squares) of the “tracking error”. This error is defined as the difference
between the x-Coordinate of laser dot on screen (whiteboard) and the robot tag’s
projected x-Coordinate (as shown in Fig. 2). After setting the bot in behind the
arena in 1 meter deep area, team can manually drive the bot to the first waypoint.
Upon reaching this waypoint, bot has to automatically navigate through the
remaining three waypoints. To pass the P-Day specification, robot (not just the
tag) has to remain in the arena, robot should reach the final waypoint within 15
minutes and laser should never illuminate in the negative y-direction. In the case
where any of these rules aren’t met, the team will be allowed to manually driving
the bot through remaining waypoints, forfeiting any chances of winning the
competition.

Figure 2: Schematic Representation of “tracking error”.
1.2 Equipment Involved
1.2.1 Computer vision system
To track the arena and robot barcode tags, computer-vision system was provided
that used a Logitech webcam. The software simulated the two aforementioned robot tag
sensors, in addition to mapping arena coordinates and noticing if the robot tag has
reached the next waypoint.
1.2.2 Dynamixel RX-64 and EX-106 Servo Motors
Servo motors were provided along with the python library. These motors allowed
both constant rotation and joint mode operations, where prescribed torque between -1 to
+1 or prescribed angles between -10000 to 10000 could be specified. Maximum of 6
servo motors (a combination of RX-64 and EX motors) were allowed in any suitable
configuration.

1.3 Design Brainstorming
1.3.1 Hardware
Group brainstorming meetings focused on making a design which is efficient and
avoids the usage of complex mechanical structures and mechanisms which could be
interfaced with robust and flexible code. The team came up with 5 designs satisfying the
constraints in the given problem statement. These robot ideas are as follows:
1.3.1.1 Walker Robot
At first, the team came up with an idea of a robot moving on wheels with a
“walker” attached to it. The walker pushes down each time the robot has to turn and
helps in turning of the wheels by lifting them. Walker also mounts the laser on it so that
laser doesn’t change direction each time the robot turns (see Fig. 3). This idea is
inspired from the Blue team’s bot from 2012. The idea was also implemented by Blue
team in this year’s project 1.
Pros and Cons: This bot solves the issue of laser always pointing in the Y-direction.
Also, it discretizes motion in x and y direction only and with good calibration, could lead
to very accurate 90 degree turns. But, on the downside, the robot includes complexity at
both hardware and software ends. Two complex mechanical mechanisms including
rotating wheels and walker are required on the same bot chassis which could hinder
with the laser projection.
Figure 3: Concept design of Walker Robot
1.3.1.2 Crane Robot
This robot uses a slider-linkage mechanism to cover the arena in y-direction by
moving robot in a guided rail. When the robot moves in x-direction, the robot is lifted
using the rope attached to the base of the robot (as shown in Fig. 4). This rope also
helps the bot in pushing and pulling it in y-direction.

Pros and Cons: The robot provides discrete x and y motions running on two different
rails. Also, the bot uses a slider-linkage mechanism which has well-documented
mathematical modeling. But, the bot is bulky in design and may threaten the design
parameters of having less complex design.
Figure 4: Concept design of Crane Robot
1.3.1.3 Adaptation of Red Team’s Project 0 Robot
Red team in project 0 made a robot which could make precise and repeatable
movements and could use a servo controlled turret style laser to adapt to this project.
Pros. and Cons: Fig. 5 shows the robot Red team made for project 0 which has an
advantage that it’s already made but it is susceptible to error accumulation.

Figure 5: Concept design of Adaptation Robot
1.3.1.4 Revolute-Revolute (RR) Manipulator Robot
This robot has two rotating links operated by controlling the joint angles as shown
in Fig. 6.
Pros. and Cons: The bot is able to orient laser quite accurately using synchronized
belt-pulleys as shown in Fig. 7 (side view) and Fig. 8 (top view). But, the bot may require
high torque motor to move the arms. Also, to avoid crossing out of the arena, the bot
may need a robust trajectory planning while reaching waypoints placed anywhere in the
arena.

Figure 6: End effector of R-R robot locating different points in arena (top view)
Figure 7: R-R Robot showing belts and pulley system (side view)

Figure 8: Belt-Pulley system (with constantly upward pointing arrows) of R-R Robot (top view)
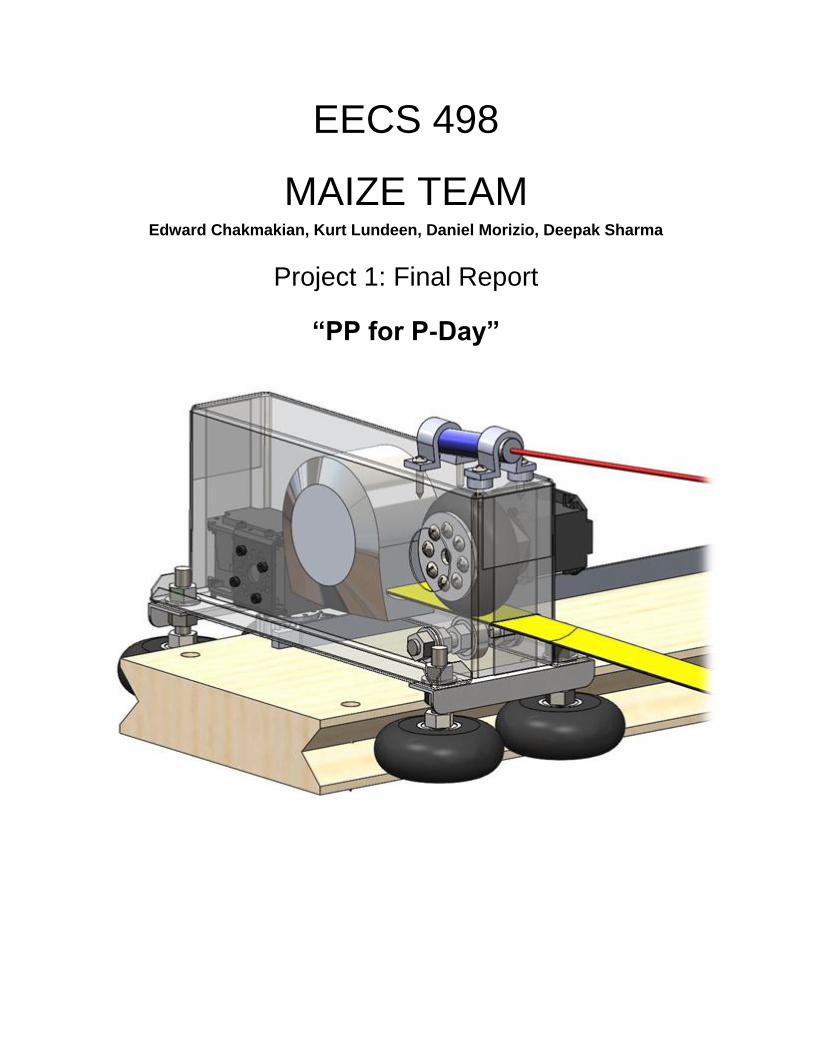
1.3.1.5 Prismatic-Prismatic (P-P) Robot
This robot works with two prismatic links moving in both x and y directions. Being
inspired from a video [2] showing the usage of automatically controlled tape measure,
team came up with idea of using the “electric tape measure” to govern the movements
in y-direction. An extension-retraction system shown in Fig. 9. A guiding track made out
of belts, rails or rack and pinion could be used for the movements in x-direction as
shown in Fig. 10 using belt and pulley assembly (as shown in horizontal (x) direction).
Pros and Cons: This robot has a simpler design than that the aforementioned R-R
robot and will require easier to implement control system. But, this bot could be slower
than some of the aforementioned bot designs and will need a better consideration over
measuring the extension of robot tag in y-direction.
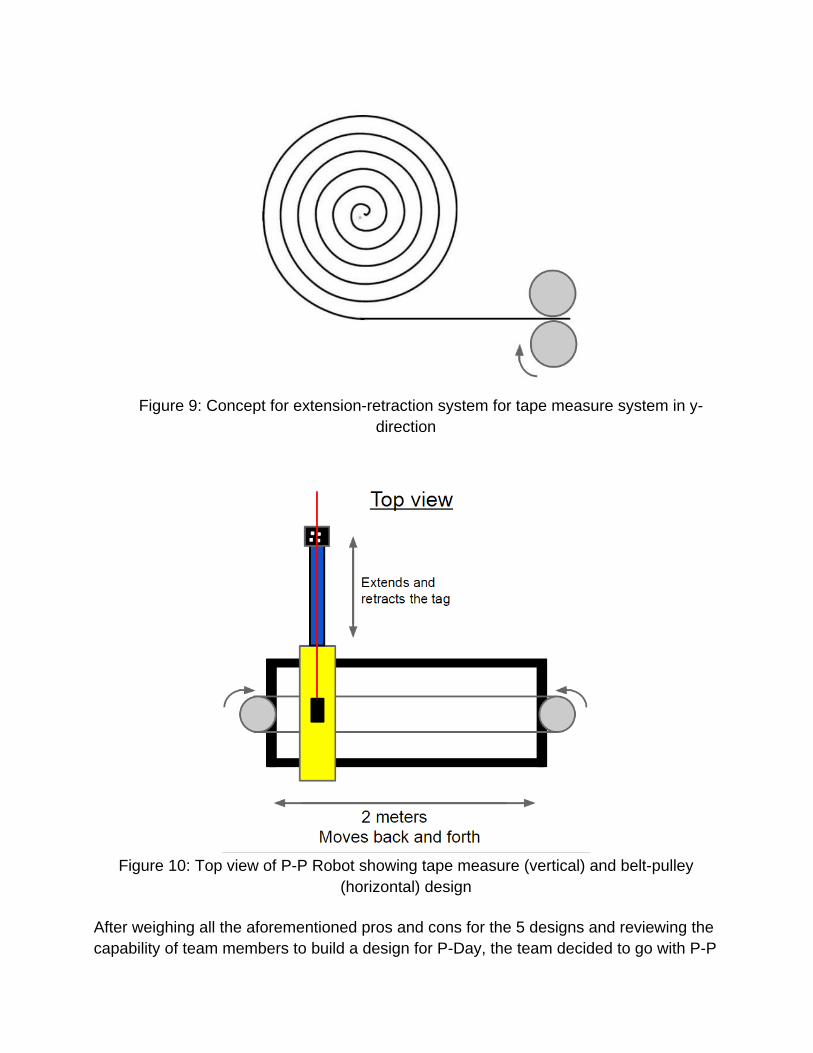
Figure 9: Concept for extension-retraction system for tape measure system in y-
direction
Figure 10: Top view of P-P Robot showing tape measure (vertical) and belt-pulley
(horizontal) design
After weighing all the aforementioned pros and cons for the 5 designs and reviewing the
capability of team members to build a design for P-Day, the team decided to go with P-P

Robot (5th design) and used rack and pinion instead of belt-pulley system for x-direction
motion.
1.3.2 Software
The 1996 paper by Borenstein et al [3] influenced the direction of our software
design. Knowing that the accumulating odometry error of buggy style robots was
unbounded, we quickly settled on a mechanical platform that avoided this movement
style. Initially a revolute-revolute planar manipulator was decided upon and software
development moved forward in this direction. If the team would have settled with this
design, a controller using the inverse kinematics described in Kucuk and Bingul’s Robot
Kinematics [4] would have been implemented in Python to calculate the necessary
servo angles to move to the waypoints. However a mechanical change to a prismatic-
prismatic manipulator changed the course of development.
The initial plan for the software controller was to first implement manual
controller based on the ShaveAndHaircut.py; included in the virtual machine
environment. This would help debug the mechanics of the robot before a final
automated controller was implemented. This manual controller would utilize a Korg MIDI
controller which included sliders, which could be used to fine tune arm speed and
buttons to activate movement.
Finally an autopilot would be implemented which would use the odometry with the
rack and pinion controlling movement in x-direction. A rack and pinion with the
Dynamixel MX-64 motor and its no dead-zone encoder controller was considered
adequately accurate to get our waypoint within the bounds of the target waypoints. This
assumption would need to be tested in system later on and if it fails, additional x-axis
sensors such as the Sharp GP2Y0A21YK0F could be implemented to increase the
accuracy. The flowchart shown in Fig. 11 shows the general outline of the vision for our
robots controller. It is based on the assumption that we would have MX-64 motor
modules and our odometry would be accurate enough to get us within the waypoint
perfectly.

Figure 11. Initial Controller Flowchart

2. Implementation
2.1 Initial Concept
A top view of the initial concept is shown in Fig. 10. The concept was inspired by
the recollection of the existence of electrically-driven tape measures during a
brainstorming discussion. The initial robot concept was drawn with a belt and pulley
system, but it was only meant to represent a generic mechanism for linear translation
along the x- direction.
2.2 Robot Design and Construction
The design process for the Prismatic-Prismatic (PP) Electric Tape Robot began
with a consideration of the robot’s x- and y- movements. The requirement that the robot
be able to reach any point in the arena, combined with the inherent nature of a
prismatic-prismatic manipulator, suggested that the tag should be capable of translating
the entire length of the arena in both the x- and y- directions (see Fig. 12). Such
prismatic motion is often accomplished mechanically by means of rails, guide ways, or
tracks. In some systems like gantry cranes and 3D printing machines, tracks span the
entire workspace and the end effector remains within the confines of the tracks. In other
prismatic systems like cabinet drawers and telescoping cranes, the end effector extends
beyond the limits of the track. In general, spanning tracks over the entire workspace
seemed to offer the benefits of increased position control and mechanical stability.
Figure 12: Competition Arena
The first decision confronting the design was whether to span tracks over the
entire arena, or to extend the robot beyond its tracks. Translations along the x-direction
were considered first. Although the robot is constrained to begin each competition run
inside the setup area, the setup area spans the entire x-dimension of the arena, so it
seemed sensible to span a track along the entire x-dimension of the arena. However,

translations along the y-direction are different. Since the robot is constrained to begin
each run inside the setup area, and since the setup area is outside the span of the
workspace, it follows that the robot must either extend into the arena or deploy a y-
displacement track system into the arena after the start of the run. While deployment of
a track system may have been a surmountable challenge, it seemed to add a level of
complexity to the system in terms of mechanical design and operation. Considering the
time constraints of the project, it was decided to sacrifice position control and
mechanical stability for simplicity in mechanical design and operation. Thus, it was
decided the robot would extend in the y-dimension of the arena, rather than deploying a
track system.
The specifics of the robot’s y-directional extension were considered next. Likely,
the simplest method for extending the robot may be to translate a single rigid member
relative to the main robot. One can imagine a long stick being moved across the robot to
reach long distances. However, such a solution was not pursued because the rigid
member would need to be at least 2 meters long to reach all points in the arena, while
the setup area is only 1 meter deep. Thus, it might be difficult to fit the rigid member in
the setup area at the start of the run, and the member would likely protrude from the
rear of the setup area during the run.
Possibly the next simplest method for extending the robot outward would be to
translate multiple rigid members relative to the robot, and relative to one another, i.e.,
the robot could extend along the y-direction by telescoping. As the setup area is 1 meter
deep and the arena is 2 meters long, the robot would require a minimum of two
telescoping members and one stationary member to reach every point in the arena.
However, the actuation of one member relative to another member, as well as a second
member relative to the first member, in both forward and reverse directions seemed to
present considerable challenges in terms of mechanical design. Thus, the telescoping
solution was not pursued.
Lastly, extending the robot could be accomplished by translating a member
having properties of both rigidity and flexibility. The member could sufficiently resist
compression, bending, and buckling while extending outward, but exhibit those
behaviors when retracted into the setup area. For example, one can think of a tape
measure. A tape measure can be extended out and support its own weight at some
distances, yet can also be retracted and coiled around a spool inside a compact
enclosure. Such a system offers the benefits of being both compact and requiring
actuation of only one member. This was the method selected for extending the robot in
the y direction.
Once it was determined that extension in the y-direction would be accomplished
by a member possessing both rigidity and flexibility, a further investigation of that
mechanism was in order. As previously mentioned, a tape measure is capable of
exhibiting both rigidity and flexibility by changing its cross sectional shape. The tape can
be thought of as a spring. In fact, one material commonly used to make tape measures

is spring steel. The tape is pre-stressed to form a cupped shape when relaxed, but can
be flattened when rolled against a flat spool. Due to the properties of spring material, the
tape will return to a cupped shape after leaving the spool. A comparison of a cupped
tape cross section versus a flattened tape cross section is shown in Fig. 12, where the
images represent the tape in extension from the robot. It can be seen that, in general,
the cupped cross-sectional area has shifted away from the neutral axis. In other words,
each infinitesimal area of the cross section has a greater y-displacement from the
neutral axis, and thus the squared sum of infinitesimal area centroid y-displacements
has increased. More concisely, the second moment of area, 𝐼, has increased (see the
equation below).
𝐼𝑥𝑥 = ∫ ∫ 𝑦2𝑑𝑥 𝑑𝑦𝐴
Material stress due to bending is related to the inverse of the second moment of
area, 𝐼. Thus, the internal stresses in the tape are less in the cupped shape, and the
material is better able to support the load of its own weight (with some deflection).
Figure 12: Cross Sections and Side Views of Extended Members
Although a tape measure is known to exhibit the desired characteristics of rigid
extension and flexible storage, a brainstorming of alternatives led to a counterpart
foamcore concept. In the foamcore concept, a piece of ½” or 1” thick foamcore is cut
into a beam. Then, transverse slits are cut through the foamcore at a fixed interval along
the length of the beam, leaving the upper skin intact (see Fig. 13). When the foamcore is
rolled on a spool, the slits open, and the foamcore beam bends into an arc. When the
foamcore is extended, the slits close, and the lower portions of the foamcore compress

against one another. The foamcore concept works in a similar manner to the tape (see
Fig. 12). If the foamcore is thick, its second moment of area will be large, its internal
stresses will be low enough to resist crushing or tearing, and the foamcore will stand
horizontally (with some deflection). The foamcore might be actuated by driving the spool
itself, or by driving the foamcore with smooth or toothed rollers. The foamcore concept
seemed like a viable solution, but was not pursued due to lack of familiarity with the
material’s characteristics and concerns about bulkiness.
Fig. 13: Foamcore Beam Concept
Having decided that a tape measure would be used for y-extension, actuation of
the tape was considered next. Brainstorming led to three primary options for actuating
the tape: drive the tape using toothed rollers, drive the spool directly, and drive the tape
using smooth rollers. Driving the tape using toothed rollers offers the benefits of
negligible accumulated slip and tracking error, but may require making numerous
precision cuts in the tape material. Additionally, such cuts may have the undesirable
effect of increasing the tape’s deflection. Driving the spool directly offers the benefits of
negligible accumulated slip and tracking error. However, in order for the system to
function properly, the tape measure would need a smooth outer track upon which to
slide as it is uncoiling from the spool. One can imagine attempting to drive a tape by
rotating a spool. When the spool is rotated backward, the tape is pulled firmly against
the spool, but when the spool is rotated forward, the tape may have a tendency to uncoil
itself from the spool. Thus, rotating the spool forward does not necessarily produce
forward motion of the tape out of the enclosure, but rather, might cause unspooling of
the tape inside the enclosure. The spool itself can be thought of as an inner track to
guide the tape as it is being drawn inside the enclosure, but tape measures, in general,
do not possess an outer track to guide the tape as it is being pushed out of the
enclosure. This is due to the fact that tapes are generally not pushed out of the
enclosure, but pulled out. Attempts were made to create a smooth outer track to allow
for a spool-driven system, but were unsuccessful. Based on observations, it seemed
likely that such an outer track could be successfully developed, if given more time. Thus,
it was decided the tape itself would be driven by smooth rollers. Despite the fact that
smooth rollers were expected to produce slip and tracking errors, they offered simplicity
in terms of mechanical design and fabrication.
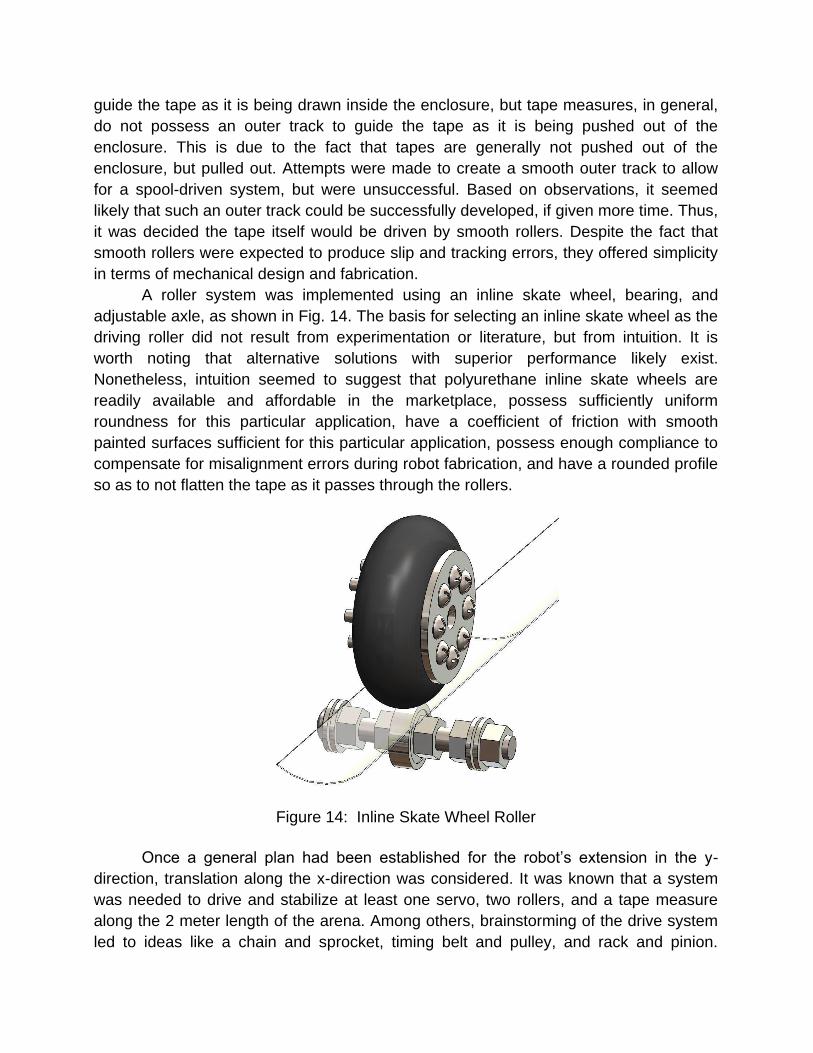
A roller system was implemented using an inline skate wheel, bearing, and
adjustable axle, as shown in Fig. 14. The basis for selecting an inline skate wheel as the
driving roller did not result from experimentation or literature, but from intuition. It is
worth noting that alternative solutions with superior performance likely exist.
Nonetheless, intuition seemed to suggest that polyurethane inline skate wheels are
readily available and affordable in the marketplace, possess sufficiently uniform
roundness for this particular application, have a coefficient of friction with smooth
painted surfaces sufficient for this particular application, possess enough compliance to
compensate for misalignment errors during robot fabrication, and have a rounded profile
so as to not flatten the tape as it passes through the rollers.
Figure 14: Inline Skate Wheel Roller
Once a general plan had been established for the robot’s extension in the y-
direction, translation along the x-direction was considered. It was known that a system
was needed to drive and stabilize at least one servo, two rollers, and a tape measure
along the 2 meter length of the arena. Among others, brainstorming of the drive system
led to ideas like a chain and sprocket, timing belt and pulley, and rack and pinion.

Although all three systems seemed equally suitable for driving the robot along the 2
meter span, a search of sizes and pricing suggested that a nylon rack and pinion system
would likely be the most economical solution.
Not only was it important to consider the mechanism for driving the robot’s
translation along the x-direction, but also stabilizing such movements. For the case of
this particular robot, it was expected that control the robot’s Euler angles would be
critical to the robot’s performance due to the distance of the laser from the screen. For
example, with the tag fully retracted, the tag and laser pointer could be approximated as
being at the same location, roughly 3 meters from the projection screen. In such a case,
a 1 degree perturbation in the robot’s yaw angle could produce roughly a 5 centimeter
discrepancy between the tag’s x-location and the projected laser dot’s x-location.
Similarly, with the tag fully extended (2 meters from the robot), a perturbation in yaw
angle could initiate oscillations in the tape. The tape’s oscillations could potentially
continue after the main robot and laser have come to rest, thereby accumulating error
from discrepancies between the tag’s x-location and the projected laser dot’s x-location
until the oscillations dampen out.
The mechanism selected for achieving such stabilization was a track and loaded
roller system. By preloading the rollers against the track, especially with a viscoelastic
material, the robot is equipped with some ability to reject disturbances from such
sources as track irregularities, roller irregularities, friction between the tape and the
ground, and resistance between the tag and air. Similar to passive automobile
suspension systems, which consist of a spring and a damper, viscoelastic materials
naturally exhibit the properties of a spring and a damper. Thus, polyurethane inline
skate wheels were selected for the track rollers due to their perceived market availability
and affordability, uniform roundness, viscoelastic material properties, and rounded
profile. The reason for seeking a rounded profile was to provide the robot with
multidirectional support. As can be seen in Fig. 15, the combination of a rounded profile
roller and a v-grooved track allows for directional control of the contact forces. The
multidirectional, preloaded forces statically load the robot’s body in all degrees of
freedom (y, z, yaw, pitch, and roll) except along the x-direction. These forces, along with
the damping properties of the rollers, act to support the weight of the robot, reduce
impulse forces between the rollers and track that might otherwise occur if the rollers
were not statically loaded, and help to reject disturbances to the system.
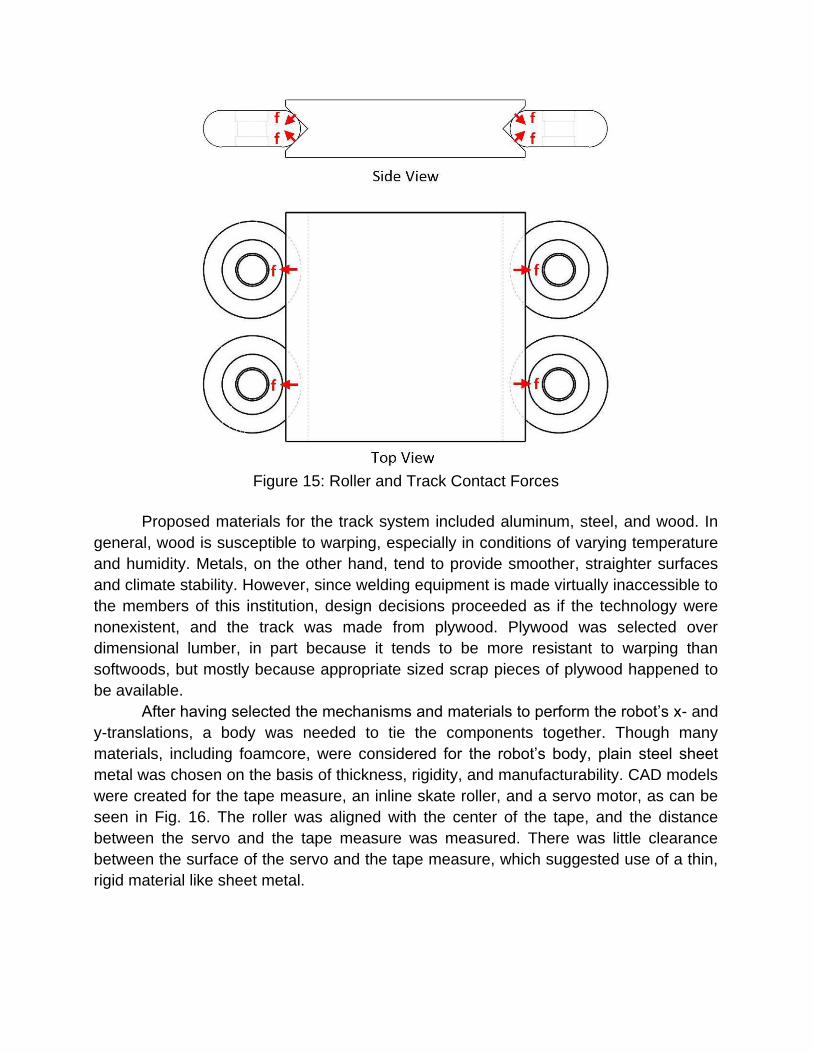
Figure 15: Roller and Track Contact Forces
Proposed materials for the track system included aluminum, steel, and wood. In
general, wood is susceptible to warping, especially in conditions of varying temperature
and humidity. Metals, on the other hand, tend to provide smoother, straighter surfaces
and climate stability. However, since welding equipment is made virtually inaccessible to
the members of this institution, design decisions proceeded as if the technology were
nonexistent, and the track was made from plywood. Plywood was selected over
dimensional lumber, in part because it tends to be more resistant to warping than
softwoods, but mostly because appropriate sized scrap pieces of plywood happened to
be available.
After having selected the mechanisms and materials to perform the robot’s x- and
y-translations, a body was needed to tie the components together. Though many
materials, including foamcore, were considered for the robot’s body, plain steel sheet
metal was chosen on the basis of thickness, rigidity, and manufacturability. CAD models
were created for the tape measure, an inline skate roller, and a servo motor, as can be
seen in Fig. 16. The roller was aligned with the center of the tape, and the distance
between the servo and the tape measure was measured. There was little clearance
between the surface of the servo and the tape measure, which suggested use of a thin,
rigid material like sheet metal.

Figure 16: Clearance between Tape Measure and Servo Influences Material Selection
Another design concern was the potential for tracking error caused by
misalignment of the roller. It was anticipated that a high force would be required
between the roller and the tape to minimize tape slip, but that such a force might
inadvertently bend the body of the robot. As can be seen in Fig. 17 where the body of
the robot is represented by a green line, bending of the body can result in misalignment
of the roller, and therefore tracking error of the tape. Thus, rigidity was also an important
criteria for selection of the body material. Additionally, sheet metal was selected
because it was a material with which members of the team were familiar.
Figure 17: Potential for Body Bending to Produce Tracking Errors

Lastly, a guide way was incorporated in the design as a mechanism for limiting
the accumulation of tape tracking error. If the roller were to push the tape to the left or
right, the tape would track to that side until contacting the guide way. Upon contact,
forces exerted on the tape from the guide way would restrict the tape from tracking
further. Said another way, the slot’s edges would act to constrain the transverse motion
of the tape. The guide way was formed by cutting a rectangular slot in the robot body, as
shown in Fig. 18.
Figure 18: Tape Guide way to Limit Accumulation of Tape Tracking Error
More details regarding the specific dimensions, materials, hardware, costs, CAD
files, and manufacturing processes used to make the Prismatic-Prismatic (PP) Electric
Tape Robot can be found in the project construction document [5].
2.3 Design Considerations
2.3.1 Sources of Error
We identified three main potential sources of error for our robot: camera
projection, tape measure angle, and y-axis slip. Of the three errors, we concluded that y-
axis slip error caused by extending and retracting our tag would be the most problematic
for our design. Below is a more in depth description and our thoughts on each of these
errors.
Camera projection error is the error caused by having the tag off of the ground at
a certain height. Fig. 19 shows the physical set up of the arena how we can
conceptualize the projection error.
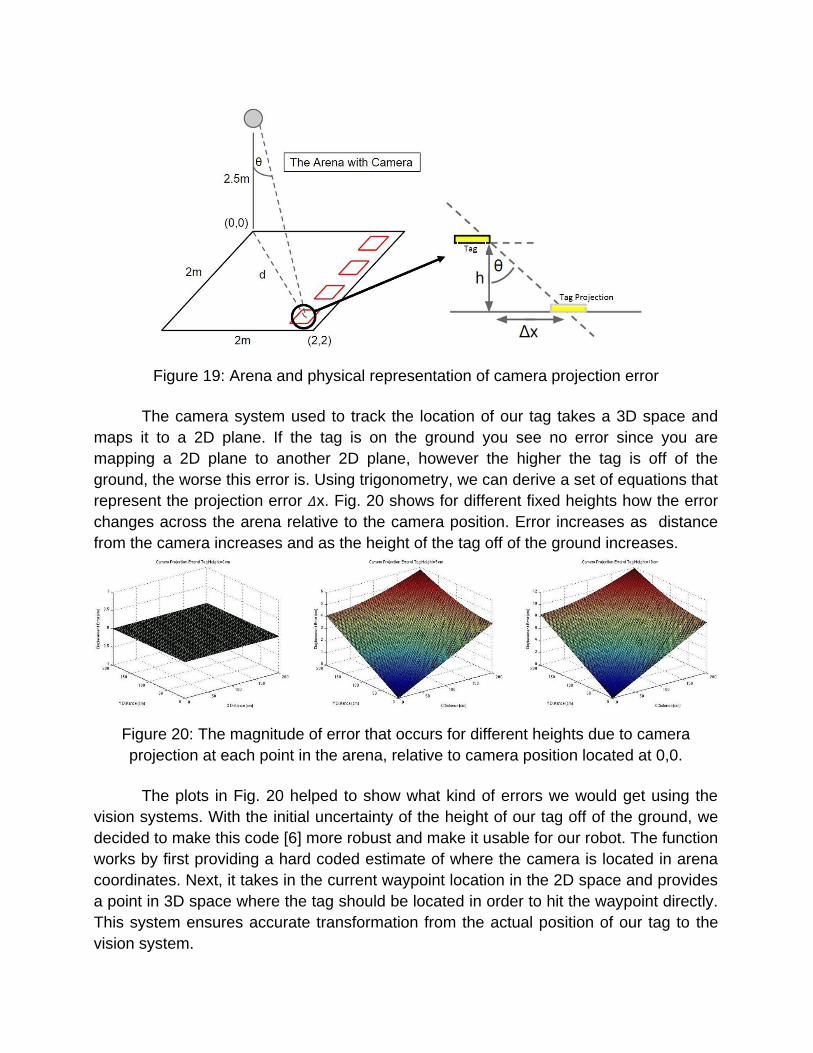
Figure 19: Arena and physical representation of camera projection error
The camera system used to track the location of our tag takes a 3D space and
maps it to a 2D plane. If the tag is on the ground you see no error since you are
mapping a 2D plane to another 2D plane, however the higher the tag is off of the
ground, the worse this error is. Using trigonometry, we can derive a set of equations that
represent the projection error 𝛥x. Fig. 20 shows for different fixed heights how the error
changes across the arena relative to the camera position. Error increases as distance
from the camera increases and as the height of the tag off of the ground increases.
Figure 20: The magnitude of error that occurs for different heights due to camera
projection at each point in the arena, relative to camera position located at 0,0.
The plots in Fig. 20 helped to show what kind of errors we would get using the
vision systems. With the initial uncertainty of the height of our tag off of the ground, we
decided to make this code [6] more robust and make it usable for our robot. The function
works by first providing a hard coded estimate of where the camera is located in arena
coordinates. Next, it takes in the current waypoint location in the 2D space and provides
a point in 3D space where the tag should be located in order to hit the waypoint directly.
This system ensures accurate transformation from the actual position of our tag to the
vision system.

Tape measure angle error is caused by the potential of our tape to extend at
some angle theta away from our desired path; our desired path is parallel with the laser
which is shown in Fig. 21. This deflection in theta could be caused by misalignment or a
force on the side of the tape measure. To gauge how bad of a problem this would be for
our robot, we applied a force to the tape while it was extended; we measured a
maximum deflection angle 𝜃=10°. Fig. 22 shows error with respect to the distance our
tape is extended and the angle 𝜃. It is easily seen that as both theta and the extended
distance increase, the error is very large.
Figure 21: Tape measure angle error caused by misalignment or force on the side of the
tape measure
Figure 22: Error of the tape measure as it extends out at different angles
This error can be related to the acceleration of the base in x-direction. Using the
first principles, this arrangement could be related to an accelerated pendulum where the
tape acts like a pendulum. Two forces (given air drag is assumed to be zero) acting on
the end of the hanging tape are surface friction (F) and tension force (T) caused by tape.

For an acceleration of “a”, there’s a deflection in tape by an angle theta when the end of
the tape moves with a velocity “v” (as shown in Fig. 23).
Figure 23: Schematic representation of accelerating robot (base) and deflecting tape
This system of forces could be resolved in x and y direction as follows:
X- Direction: 𝑇. 𝑐𝑜𝑠(𝜃) − 𝐹. 𝑠𝑖𝑛(𝜃) = 𝑚.𝑣2
𝐿
Y- Direction:𝑇. 𝑠𝑖𝑛𝜃) + 𝐹. 𝑐𝑜𝑠(𝜃) = 𝑚. 𝑎
where,
F= K.(Normal from ground)= K.m.g ;
K= Coefficient of rolling friction, m=mass of the end (clip) of measuring tape, g=gravitational force constant.
These equations give x-acceleration in terms of deflection angle error 𝜃 as:
𝑎 =𝑣2. 𝑡𝑎𝑛 (𝜃)
𝐿+ 𝐾. 𝑔. 𝑠𝑒𝑐( 𝜃)
Using this equation, for a given value of 𝜃, appropriate value of acceleration could be
obtained.
Y-axis slip error is caused by the slipping of the roller on the tape as it extends or
retracts. This is a problem because if there is a little bit of slippage, it goes unaccounted
for because there is no way to track it. This error is even more dangerous because it
will accumulate throughout the run. There is no way to accurately model y-axis slip error
for our system because it is based solely off physical design and performance of the
system. However, it is easy to conceptualize how to reduce this slippage; we can
increase the friction between the roller and the tap. This could be done by adding a
material with a high friction coefficient or by providing a large upward force on the tape.

2.3.2 Re-evaluations and Modifications
After looking at our potential errors and where our robot could fail, we made
several conclusions. The first, our robot’s tag should remain as close to the ground as
possible. Large errors in both finding the waypoints and laser tracking make us shy
away from having a tag high off the ground. Instead of angling our tape measure up in
the air so that when fully extend it does not hit the ground, we extend our tape out
straight with no angle compensation and allow it to hit the ground. The tag will hit the
ground when the tape is extended at a distance of approximately one meter. Once it hits
the ground, it will slide on a furniture slider that is placed at the end of the tape. After
looking at Fig. 20 and taking into account the low heights of our tag, the camera
projection error seems negligible. Also with this modification, it limits our movement in
the x-direction as the tape will be touching the ground producing friction force. Similar to
Fig. 21, the tape will experience some amount of angular deflection. Since the tape Is
subject to deflect up to 10° and causing a large error, we found it best not to translate in
the x-direction while the end of the tape was touching the ground.
The second conclusion we made is that a guardrail for the tape measure should
be in place to ensure the extension and retraction of the tape was inline with the laser.
Looking at Fig. 22, it is clear that if we can limit angle 𝜃 to less that 1.5°, the error will be
reduced for most of the points in the arena. But during testing, it was observed that even
with the guardrail in place, the tape still wobbled while translating in the x-direction as it
touched the ground. This leaves us with only one option of retracting the tape and tag in
the y-direction, before each x-direction movement from one tag to another. With this
being said, we no longer have to take into the x-acceleration error since we will be
moving with our tag fully retracted. Overall, this modification simplifies the movement of
our robot.
The last conclusion we made was that we would not be able to track the y-
position of our tag accurately if there is slip between the roller and the tape. If we tried to
match the tag position with the encoder in the motor and slip occurred, the encoder
value would not match up with tag position. Over time, this error would accumulate and
the tag would not be able to hit the waypoints and potentially go out of bounds. To
compensate for this, our plan is to fully extend our tag to the edge of the arena and then
retract it back to its original location based off of a manual time calibration. This
calibration will help to alleviate the uncertainties associated with the tape extension.
2.4 Motion Algorithm
2.4.1 Robot
Inside of Robot.py there are two implementations of a robot included. The first
class named Robot was designed under the assumption that we would be using MX-64

motors. These motors would be populated by the Cluster command in the logical.py
module and passed into the Robot instance. The original implementation of this robot
was designed with guiding idea that the rack which our robot rode on could be broken
up into integer N rotation chunks and then its location could be fine tuned using the no
deadzone encoder in the MX-64 motor controller. This was chosen as due to the
diameter of our pinion being 3.18 cm which led to the full rotation x-translation shown
below:
𝑑𝑒𝑛𝑐𝑜𝑑𝑒𝑟 ∗ 𝜋 = 9.99 𝑐𝑚
This nicely segmented the the arena into 20 equal chunks. Movement was
facilitated by the moveNRotationsForward and moveNRotationsBackward functions
inside the robot. These would move the robot approximately 10cm to the right or left
respectively and update the robots Xrotations variable by the amount of rotations
moved. Fine movement was handled by the move2EncoderPos and the
move2EncoderPosBack functions which when given an encoder position would move
the robot to within 1° or 0.028 of the desired location. Once the use of our two MX-64
modules was made impossible due to failure, development of this class was halted.
The second class in Robot.py named EXRobot was the class used for our robot
once we had made the switch to EX-106 motor modules and the one used in final
competetion. The deadzone in these modules was large and thus could not be used
reliably with the code developed for the MX-64 modules. The decision was made to
instead configure the EX-106 modules for multi-turn mode which reported encoder
positions from -13000 to 390000 in units of hundredths of a degree. Given this fact, an
incrementPosRegister was developed which, during movement would increment the
absPos instance variable to keep track of absolute position of the robot on the rack.
Next a function called calcTargetPos was developed to calculate the
corresponding absPos needed to line the robot tag with the next waypoint tag. This
value was stored in the targetPos member variable. This function along with checkPast
were the two functions that facilitated the logic of movement in the autopilot. The
function checkPast would return false unless absPos was greater or less than the
targetPos for forward and backward movement respectively.
The last base EXRobot function was the unfurl function. This facilitated the
expelling of the tape measure and its subsequent retraction. It based its timing using the
time library in Python, which was deemed sufficient as the only alternative was to
implement another sensor for control.
2.4.2 Manual Controller
The slider and buttons of the Korg MIDI controller made it easy to create a
manual controller that offered our team the ability to test our mechanical platform easily.
Our implementation is contatined in TagStreamer.py and used a joyApp subclass to
handle MIDI events; specifically, the slider was used to adjust the amount of torque
delivered by the motors. With the slider pushed all of the way up; it would deliver max
torque and when pushed all the way down, it would deliver no torque. The other 254
values that the slider could output were mapped linearly between these two bounds.
The buttons in the first MIDI slot controlled the xtranslation motor, with up being
movement in the positive x-direction and down being the negative x-direction, and the
second controlled the tape unfurling motor in a similar fashion.
During mechanical debugging, frequent event queue overflows were being
reported by TagStreamer.py. This pushed development of a keyboard based controller,
with the arrow keys being mapped to movement and a fixed torque, was implemented
which solved this problem.
2.4.3 Automated Controller
While mechanical characterization and verification was ongoing work begun on
the implementation of our automated controller. This was controlled first by setting a
zero point on the rack where all absPos measurements would be referenced from. For
this task, a zero point on the extreme left of the rack was chosen, and once the “\” was
pressed absPos logging began in the EXRobot instance being used.
Once set the user would move to the first waypoint using the controls in the
EXRobotApp class and press the “enter” key. This would first pull the waypoint back
based on a time that would be found during the calibration period. After the waypoint
was pulled back the EXRobotApp would ignore user input and call the EXRobot class’s
autoPilot class.
The initial autoPilot logic was the one diagramed in Fig. 24 which worked in
getting the robot within 10 cm of the desired waypoint. To help increase accuracy the
following calibration factor was multiplied to the X location of the next waypoint to
calibrate out the difference in our rack size and the real arena size:
𝐶𝑎𝑙𝐹𝑎𝑐𝑡𝑜𝑟 = 𝑑𝑖𝑠𝑡𝑋−𝐶𝑜𝑟𝑛𝑒𝑟 𝑇𝑎𝑔𝑠/𝑙𝑒𝑛𝑔𝑡ℎ𝑅𝑎𝑐𝑘
This decreased our X-location error to below 2 cm which given an ideal vision
system would have made this a complete controller. However because our robots
waypoint hung as high as 5 cm above the ground the projection error due to the camera
could still lead to missed tags. To rectify this a “wiggle” function was added to the
EXRobot class which changed the logical flow chart of automated movement as shown
in Fig. 25. 5 cm was chosen for the the wiggle distance as it roughly the size of the robot
tag and the max projection error we modeled was 2.5 cm. This was also the distance
used by the wiggle function in our final model.

Figure 24: Initial Controller Flowchart

Figure 25: Final Controller Flowchart
Wherever set_torque commands were sent to the two motors a value of .5 input.
This was decided because we verified that this was a torque high enough to ensure
movement both directions without being too fast for the camera system.
3. Expected Performance
3.1 Modeling Software
The modeling code for our robot was stored in simTagStreamer.py, robotSim.py,
robotFunctions.py and plotter.py. simTagStreamer.py holds both the manual controls
for the robot along with the mechanism by which the robots postion is reported to
waypointServer.py in the TestRobot class. The manual control was implemented with
the left and right arrow keys handling negative and positive x-axis translation and the up
and down arrow keys handling positive and negative y-axis translation. Two other
controls were also implemented. The first being a save function which is controlled by
the ‘s’ key and saves a log of the laser and tag position for plotting. The other control is
the autopilot controlled by the ‘a’ key. Once pressed the robot assumes full control of its
motions.
The error modeling is implemented in the robotFuncitons.py which includes
functions that handle the three sources of error: the tape being expelled at an angle, the
error induced by the camera and slip on the tape and rack and pinion. The function
tapeAngleError returns an array of the x-axis and y-Axis error induced by the measuring
tape being expelled at an angle relative to the laser pointer. These values are governed
by the following equations:
𝑥𝑒𝑟𝑟𝑜𝑟 = 𝑡𝑎𝑝𝑒𝐿𝑒𝑛𝑔𝑡ℎ ∗ 𝑠𝑖𝑛(𝜃𝑒𝑟𝑟𝑜𝑟)
𝑦𝑒𝑟𝑟𝑜𝑟 = 𝑡𝑎𝑝𝑒𝐿𝑒𝑛𝑔𝑡ℎ − 𝑡𝑎𝑝𝑒𝐿𝑒𝑛𝑔𝑡ℎ ∗ 𝑐𝑜𝑠(𝜃𝑒𝑟𝑟𝑜𝑟)
The function cameraProjectionError implements the error caused by the camera
not being positioned at the same x and y location of our robot. This error is implemented
as shown in the previous section and has a controllable height parameter referring to
the height of our robot’s tag off the ground.
Finally the slipError function takes in a given movement distance and returns a
movement distance that is subject to some slip in the actuation. We modeled slip as a
simple coefficient referring to the percentage of motor rotation that has no effect on
movement. As an example a movement distance of 1m and a slipCoef of 0.1 would be
returned as 99cm
The functional logic for our robot is held in robotSim.py, specifically in the
ppRobot class. This includes the horizTranslate and vertTranslate functions which
facilitate a horizontal or vertical translation respectively based on some input distance. A
save function is also implemented which pickles (a form of data serialization) a log of
laser location and waypoint location data for later plotting. Finally the autopilot and
wiggle functions handle autonomous motion using the same program flow as shown in
Fig. 25.
To get a better idea of robot performance relative to the task a plotting tool,
plotter.py, was also developed which unpickles the laser and waypoint location saved in
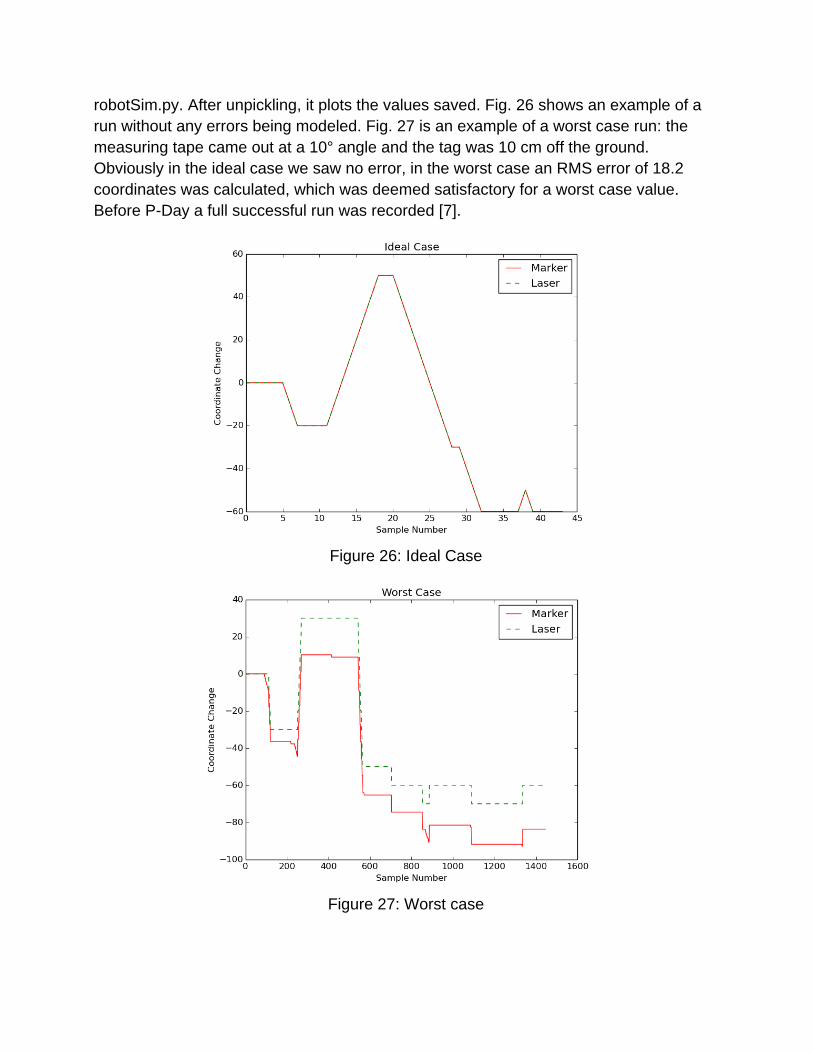
robotSim.py. After unpickling, it plots the values saved. Fig. 26 shows an example of a
run without any errors being modeled. Fig. 27 is an example of a worst case run: the
measuring tape came out at a 10° angle and the tag was 10 cm off the ground.
Obviously in the ideal case we saw no error, in the worst case an RMS error of 18.2
coordinates was calculated, which was deemed satisfactory for a worst case value.
Before P-Day a full successful run was recorded [7].
Figure 26: Ideal Case
Figure 27: Worst case

3.2 Calibration and Verification
3.2.1 Laser Calibration
In order to verify that our robot’s laser system, we used a long exposure camera.
During the test, we moved our robot from one end of the track to the other end and then
back to the original position, thus covering the full range of x-translation. Fig. 28 shows
that our laser tracks a horizontal line during the test. This is exactly what we expect with
our robot since our laser only moves along the x-axis. This laser tracking provides us
with a visual representation of what the camera system will see during P-Day.
Figure 28: Long Exposure Picture of Real Time Laser Tracking
3.2.2 Tape Angle Validation
In testing our measuring tape before its installation inside of the housing we
measured a maximum deflection angle of 10 degrees. This would lead to a maximum
tag to laser x-location error of 35 cm. This was deemed unacceptable so in the final
mechanical design a small output window 3 cms after the output of the measuring tape
was added to help keep the tape straight. Fig. 29 shows two images of the tape being
extended from the same location and an overlay showing the output angle. The output
angle is clearly smaller than the maximum of 10 degrees allowed for in our model. We
concluded that this error is negligible.

Figure 29: Tape Angle Validation
(The red line represents the initial axis of the measuring tape before extending it to a
length of 2 meters. After full extension, we can see that the red line deviates slightly
from the center of measuring tape. We found this error be negligible.)
3.2.3 X-Movement Slip Verification
Due to its rack and pinion design it was assumed before testing that the X-
translation would be very resistant to slip. This was validated using Fig. 30 below that
shows two images of the robot moving 5 rotations to the right and back taken from the
same position. No slip was observed.

Figure 30: x-translation Slip Validation
The red box represents the initial position of our tag. After moving 5 rotations and
coming back to the original position, we can see that the error is minimal.
3.2.4 Tape Extension Calibration
To ensure our robot would not be disqualified we calibrated the tape unfurling by
measuring the time it took to fully extend the tape and the time it took to completely
detract it. This measurement was required in both directions because we noticed after
repeated usage that the retracting slip was larger than the extending. In the end, values
of 10.5 seconds for unfurling and 12 seconds for retracting were decided upon.
3.2.5 X-Translation Calibration
The X-length of the arena could be variable and our rack is of constant length.
We established a scale factor by using the following expression:
(x-length of the arena)/(x-length of our rack)
This factor helps us to achieve the correct x-position on our rack in relation to the arena
coordinates.
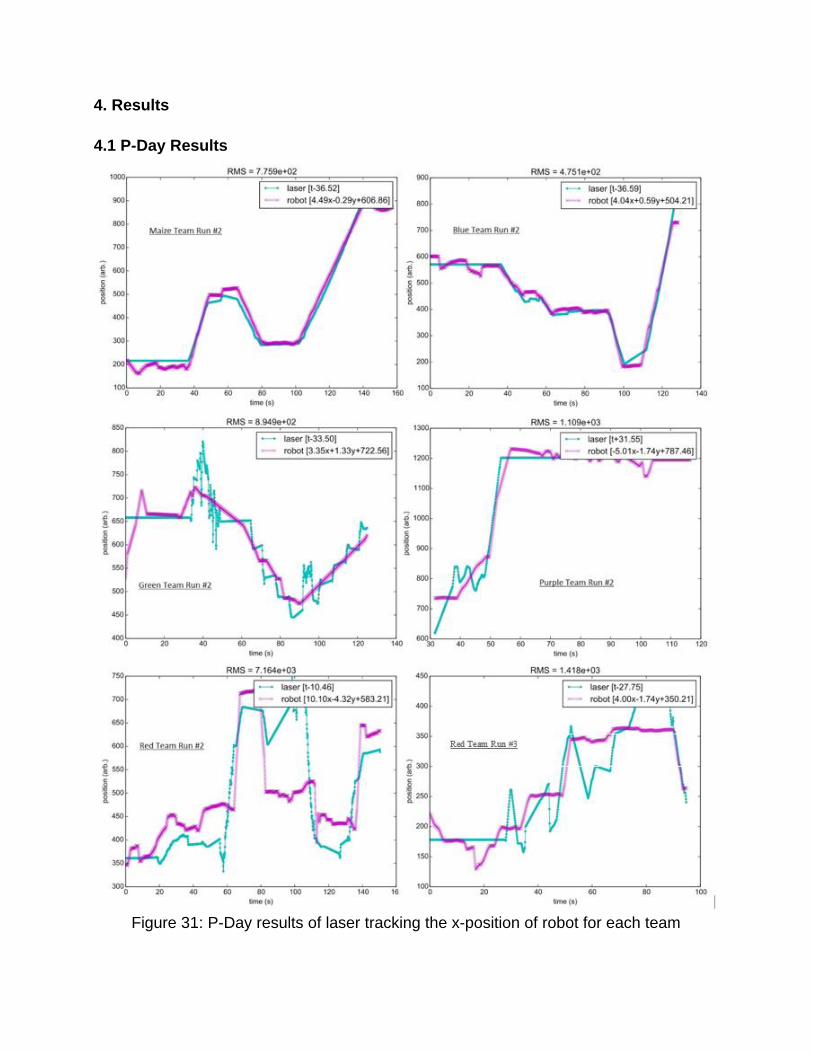
4. Results
4.1 P-Day Results
Figure 31: P-Day results of laser tracking the x-position of robot for each team
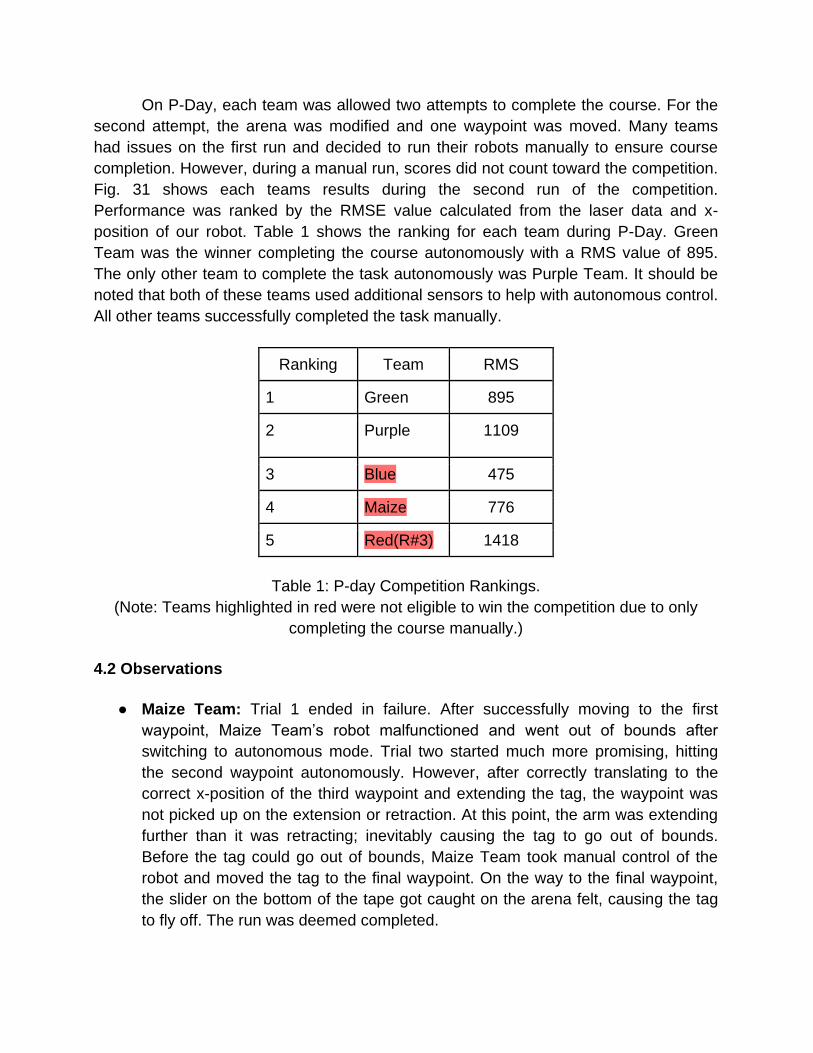
On P-Day, each team was allowed two attempts to complete the course. For the
second attempt, the arena was modified and one waypoint was moved. Many teams
had issues on the first run and decided to run their robots manually to ensure course
completion. However, during a manual run, scores did not count toward the competition.
Fig. 31 shows each teams results during the second run of the competition.
Performance was ranked by the RMSE value calculated from the laser data and x-
position of our robot. Table 1 shows the ranking for each team during P-Day. Green
Team was the winner completing the course autonomously with a RMS value of 895.
The only other team to complete the task autonomously was Purple Team. It should be
noted that both of these teams used additional sensors to help with autonomous control.
All other teams successfully completed the task manually.
Ranking Team RMS
1 Green 895
2 Purple 1109
3 Blue 475
4 Maize 776
5 Red(R#3) 1418
Table 1: P-day Competition Rankings.
(Note: Teams highlighted in red were not eligible to win the competition due to only
completing the course manually.)
4.2 Observations
● Maize Team: Trial 1 ended in failure. After successfully moving to the first
waypoint, Maize Team’s robot malfunctioned and went out of bounds after
switching to autonomous mode. Trial two started much more promising, hitting
the second waypoint autonomously. However, after correctly translating to the
correct x-position of the third waypoint and extending the tag, the waypoint was
not picked up on the extension or retraction. At this point, the arm was extending
further than it was retracting; inevitably causing the tag to go out of bounds.
Before the tag could go out of bounds, Maize Team took manual control of the
robot and moved the tag to the final waypoint. On the way to the final waypoint,
the slider on the bottom of the tape got caught on the arena felt, causing the tag
to fly off. The run was deemed completed.

● Green Team: In trial 1, Green Team successfully navigated to the second
waypoint autonomously. However, an error in their code prevented them from
finishing the course autonomously and they were forced to manually finish the
run. During trial 2, they successfully completed the course autonomously. The
laser looked a little jumpy during the run, but based on Fig. 30 it was tracking the
x-position fairly well.
● Red Team: Started off having trouble with the calibration of their robot. During
trial 1, Red team was disqualified because the laser tracking system ended up
pointing in the -y-direction. For trial 2, Professor asked the team to finish a
manual run before attempting autonomous run. The team was able to
successfully complete a manual run and further, tried an autonomous run in trial
3 which was completed as a manual run.
● Blue Team: After an initial problem where their robot would not stop driving while
headed to the first waypoint, Blue Team completed trial 1 manually. Trial 2 for
Blue team was perhaps one of the biggest disappointments of the competition.
After successful autonomous navigation to the third waypoint and turning to hit
the final waypoint, Blue Team’s robot moved away from the last waypoint. They
were then forced to disconnect and manually drive their robot to final waypoint.
● Purple Team: Did not attempt an autonomous run in trial 1 Purple team did
complete the manual movement to each waypoint with ease. During the second
trial, Purple team had problems finding the first waypoint autonomously. After a
little bit of waiting and searching, the robot made it and then very quickly finished
the rest of the course, all autonomously.

5. Discussion
5.1 Discussion of Other Teams
Blue Team: Blue Team utilized a five section robot that used 3 servos and 2 continuous
rotation motors attached to wheels. Using the second to end servos on both sides the
robot could pick up the wheels which were used for translation. The center servo
allowed for rotation around a central base allowing the robot to make turns without
changing the position of the laser. This novel movement style was clearly very
successful leading to the lowest RMS error for Blue team amongst any team. On the
other hand perhaps the complicated mechanism proved difficult to control which lead to
the team not being able to complete an autonomous run.
Red Team: Red Team utilized a simple buggy style robot with a rotatable “mast” which
allowed them to decouple the rotation of the robot and the laser. This proved to be a
tough controls challenge. The Red Team scored highest RMS error in both of their trials.
This robot would have benefited considerably from another form of sensing such as the
ones implemented by Purple and Green as measuring rotations of a robot using only
odometry from the wheels according to works of Borenstein et al. [3].
Purple Team: The “Dorito” fared well in the task after some late game modifications. It
utilized a three omniwheel translation platform which allowed the base to move without
changing its angle relative to the positive-y direction. On top of that a vision system was
developed which improved the robots ability to compensate for minor rotation changes.
Their simple mechanical platform led to a completed autonomous run and the vision and
omniwheel aided laser position managed to score a fourth place error score. Future
refinements to the vision system could probably have cut this error but given the felt
surface of the challenge area its unlikely that the omniwheels could have performed
better.
Green Team: The Green team built a simply two wheel buggy platform with an elevated
laser platform which was controlled by a magnetometer. The simple buggy mechanism
proved to be easy to control leading to this team registering one of the two fully
autonomous runs. The feedback loop developed for the laser also scored a 3rd place
error score. This made the Green Team the overall champions. Further optimizations to
the laser control could have likely lowered the error score even more, also the robot
operated more slowly than it needed to and could have cut its run time significantly.

5.2 Reflection on Current Design
5.2.1 Mechanical Design
The mechanical system generally performed as anticipated, though some
subsystems exceeded expectations. For example, the fully extended tape measure was
not as susceptible to oscillations from x-directional accelerations as anticipated.
Similarly, the tape and marker were less affected by aerodynamic disturbances than
expected.
Conversely, some subsystems did not meet expectations. For example, tracking
error proved to be a greater challenge than anticipated. The tape was driven from the
robot at a slight yaw angle and forced to rub along the edges of the guide way slot.
Eventually, such rubbing distorted the edges of the tape and caused bouncing of the tag
as the tape extended from the robot. On the day of the competition, the roller system
was adjusted to reduce misalignment. In general, the system seemed more sensitive to
tracking error than expected.
Similarly, the accumulation of slip error between the roller and tape proved more
detrimental than anticipated. Though slip error was expected, it was thought its effects
could be mitigated through calibration to achieve acceptable system performance. In the
end, that was found to not be true. It is worth noting, however, that slip seemed to
increase on the day of the competition. It is also worth noting that the aforementioned
roller adjustments were made in the direction of decreasing pressure between rollers.
Therefore, one cause of tape slip could likely have been the adjustment of the rollers on
competition day.
5.2.2 Software
Our robot’s software performance held up in line with our model on two accounts,
namely that camera projection did not hurt autonomous performance and that angle
error would not be a problem. On the other hand we modeled tape slip insufficiently.
During early testing the tape was deemed a robust mechanical system, as the robot was
used this began to change.
The control software’s major strength is its relative simplicity. The autonomous
code is based off one simple loop which has only one branch, the wiggle system. This
allowed for quick prototyping and changes could be implemented quickly. On top of that
the simplicity kept the codebase small.
The performance of the autonomous controller allowed the robot to navigate to
two waypoints totally autonomously and the logic and proved the logic of the controller.
The robot was slow but finished the task in 2:20 which was well within the bounds of the
task. During the manual positioning portion of the run our manual controller was running
into an issue where the EX-106 servos were timing out while reading the position
register. This issue was likely due to the length of the CAT-5 cables used and wasn’t
worth the time it would have taken to mitigate.
5.3 Future Modifications
5.3.1 Mechanical Design
With proper design, it is believed many of the robot’s components could have
been built from less expensive, easier to manufacture materials like foamcore.
Fabrication of the rack and pinion system from foamcore, for example, could have
resulted in an overall cost savings of approximately 35 percent.
Similarly, the incorporation of modularity in the design could have helped save
time in development. On one occasion during the development process, both servos
needed replacement. Without modularity in the design, such servo replacement required
a near complete dismantling and reassembly of the robot.
Lastly, a more careful design of the tape guide way system might have helped
improve the robot’s overall performance. If the edges of the guide way slot had been
rounded or made from a smoother, softer material like plastic, they might not have worn
away the edges of the tape as quickly, and the system might have been more robust to
tracking errors. Similarly, applying greater pressure to the rollers might have helped
reduce slip between the rollers and tape. In that same regard, a more sophisticated
adjustment system might have helped to properly adjust roller pressure and tracking.
5.3.2 Software
The largest flaw in the software design for this robot stems from an inability to
compensate for fatigue on mechanical parts and the assumption that external sensors
were not a worthwhile addition to the design. The two teams who developed the best
autonomous platforms both relied heavily on sensing. The green team used a feedback
loop and a magnetometer to keep the laser aligned with the robot and the purple team
implemented a full vision system to again help with alignment. The benefit of sensing
systems and feedback loops in general is immunity to plant changes.
The most significant plant change our robot experienced was a large change in
performance of the measuring tape while being expelled and retracted. During testing it
was decided that a dead reckoning style time based controller would be able to control
the waypoint extending without problem but as more trials were put onto the tape it
became clear that this trend wouldn’t continue. By P-Day the performance of the tape
was erratic and hard to model which led to our robots near disqualification.
Had some sensing system been implemented to alert the robot controller when
the waypoint was fully extending, this issue could have been avoided. Something as
simple as a slack servo with a string attaching the servo horn to the end of the tape
could have accomplished this. While the tape was extending the string would have
pulled the servo horn up changing the encoder angle until some critical angle was

reached. After reaching this angle the tape could have been retracted without risking
disqualification.
Another improvement that could have been implemented was the inclusion of x-
axis location sensors. A simple IR distance sensor could have lessened our reliance on
servo odometry and made the x-axis location finding trivial. The obvious downside to
these solutions is the time required for implementation, but given another chance, they
would definitely improve autonomous performance.
6. References
[1] Project 1 Task Description:
https://wiki.eecs.umich.edu/hrb/index.php/File:2014Project1Task.docx
[2] Electric tape measure video (used as inspiration for the robot design):
http://www.youtube.com/watch?v=8QYbqkR2BgY
[3] Borenstein, J., & Feng, L. (1996). Measurement and Correction of Systematic
Odometry Errors in Mobile Robots. IEEE Transactions on Robotics and Automation,
12(5). Retrieved from
https://wiki.eecs.umich.edu/global/data/hrb/images/a/a6/Borenstein-1996.pdf
[4] Kucuk, S., & Bingul, Z. (n.d.). Robot Kinematics: Forward and Inverse Kinematics. In Robot
Kinematics.
[5] Chakmakian, E., Lundeen, K., Morizio, D., Sharma, D. (2014, Nov. 3). Construction,
Calibration & Validation, Project 1, Maize Team. Retrieved from https://wiki.
eecs.umich.edu/hrb/index.php/File:Fall2014_P1_Maize_ConstCalibValidDoc.pdf
[6] Error Modeling Code: mainly for camera projection
https://drive.google.com/open?id=0B65jDZ3dAk83aE5Ja0dYSHhEdms&authuser=0
[7] Practice run of our robot finishing the track autonomously:
https://www.youtube.com/watch?v=Q3oJIg4bsaY

7. Appendix
● Modeling Code
https://drive.google.com/a/umich.edu/folderview?id=0B65jDZ3dAk83ZEhfdjFtVG5
2LXc&usp=drive_web
● Robot Code
https://drive.google.com/a/umich.edu/folderview?id=0B65jDZ3dAk83dHZnMmJjT
GxRZkk&usp=drive_web
● Calibration Pictues
https://drive.google.com/a/umich.edu/folderview?id=0B65jDZ3dAk83RzFrTm96a
21URGs&usp=drive_web
● CAD (Computer Aided Design) Models
https://umich.box.com/s/0uy0m3k2qe48x2exn8l0
● Construction Photos
https://umich.box.com/s/aifpky8s7iufhl9y4yax
● Brainstorming Documents
https://umich.box.com/s/evehzociv3j8gdbztwr3