Upload
gwhammett
View
223
Download
0
Embed Size (px)
Citation preview
7/31/2019 Hammett-Bowman Generalized EDQNM
1/23
arXiv:physics/0203
031v1[physics.flu
-dyn]11Mar2002
Non-white noise and a multiple-rate Markovian closure theory for turbulence
Gregory W. HammettPlasma Physics Laboratory, Princeton University, P.O. Box 451, Princeton, NJ 08543
John C. BowmanDepartment of Mathematical Sciences, University of Alberta, Edmonton, Alberta, Canada T6G 2G1
[email protected](Submitted to Physics of Fluids: February 11, 2002)
Markovian models of turbulence can be derived from the renormalized statistical closure equa-tions of the direct-interaction approximation (DIA). Various simplifications are often introduced,including an assumption that the two-time correlation function is proportional to the renormalizedinfinitesimal propagator (Greens function), i.e. the decorrelation rate for fluctuations is equal to thedecay rate for perturbations. While this is a rigorous result of the fluctuationdissipation theoremfor thermal equilibrium, it does not necessarily apply to all types of turbulence. Building on previouswork on realizable Markovian closures, we explore a way to allow the decorrelation and decay ratesto differ (which in some cases affords a more accurate treatment of effects such as non-white noise),while retaining the computational advantages of a Markovian approximation. Some Markovianapproximations differ only in the initial transient phase, but the multiple-rate Markovian closure(MRMC) presented here could modify the steady-state spectra as well. Markovian models can beused directly in studying turbulence in a wide range of physical problems (including zonal flows,of recent interest in plasma physics), or they may be a useful starting point for deriving subgridturbulence models for computer simulations.
PACS: 47.27.Eq, 47.27.Sd, 05.40.-a
1
http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v1http://arxiv.org/abs/physics/0203031v17/31/2019 Hammett-Bowman Generalized EDQNM
2/23
I. INTRODUCTION
Our derivation builds on and closely follows the workby Bowman, Krommes, and Ottaviani1 (we will fre-quently refer to this paper as BKO), on realizableMarkovian closures derived from Kraichnans direct-interaction-approximation (the DIA). The DIA is basedon a renormalized perturbation theory and gives an
integro-differential set of equations to determine the two-time correlation function. The DIA involves time inte-grals over the past history of the system, which can becomputationally expensive. Markovian approximationsgive a simpler set of differential equations that involveonly information from the present time. They approx-imate two-time information in the correlation functionand in the renormalized Greens function by a decorrela-tion rate parameter. The structure of the equations wederive here is similar to the realizable Markovian closure(RMC) of BKO,1 but with extensions such as replacing asingle decorrelation rate parameter with several differentnonlinear rate parameters, to allow for a more accurate
model of effects such as non-white noise. (As will bediscussed more below, the RMC does include more non-white-noise effects than one might think at first.)
The basic issue studied in the present paper can beillustrated by a simple Langevin equation (which will bediscussed in more detail in the next section):
t+
(t) = f(t), (1)
where is the decay rate and f is a random forcing or stir-ring term (also known as noise). As is well known, iff iswhite noise, then the decorrelation rate for is given by, so that in a statistical steady state the two-time corre-
lation function (t)(t) = C0 exp(|t t|) (assum-ing constant real here). However, if f(t) varies slowlycompared to the 1/ time scale, then the solution to theLangevin equation is just (t) f(t)/, and the decorre-lation rate for is instead given by the decorrelation ratefor f. Note that the Greens function (the response to aperturbation at time t) is still exp((t t)). PreviousMarkovian closures employed some variant of an ansatz,based on the fluctuationdissipation theorem, that thetwo-time correlation function and the Greens functionwere proportional to each other. This is a rigorous re-sult for a system in thermal equilibrium, but may notnecessarily apply to a turbulent system. The purpose of
the present paper is to explore an extended Markovianclosure, which we will call the Multiple-Rate MarkovianClosure (MRMC), that allows the decorrelation rate of to differ from the decay rate .
In practice, the corrections due to non-white-noise ef-fects may be quantitatively modest, as the decorrelationrate for the turbulent noise f that is driving at a par-ticular wave number k is often comparable to or greaterthan the nonlinear damping rate at that k. This isbecause the turbulent noise driving mode k arises from
the nonlinear beating of other modes p and q such thatk = p + q. Thus |p| or |q| has to be comparable toor larger than |k|, and will thus have comparable orlarger decorrelation rates, since the decay rate is usu-ally an increasing function of |k|. Furthermore, thereare some offsetting effects due to the time-history inte-grals in the DIAs generalized Langevin equation thatmight further reduce the difference between the decay
rate and the decorrelation rate. Indeed, past compar-isons of the RMC with the full DIA or with the full non-linear dynamics have generally found fairly good agree-ment in many cases,14 including two-field HasegawaWakatani drift-wave turbulence5,6 and galactic dynamoMHD turbulence.7 Some of the results in this paper helpto give a deeper insight into why this agreement is of-ten fairly good, despite the arguments of the previousparagraph, i.e., why the fluctuationdissipation ansatzis often a reasonable approximation even out of ther-mal equilibrium. But there may be some regimes wherethe differences are important and the improvements sug-gested here would be welcome. These might include in-clude plasma cases where the wave dynamics can make vary strongly with the direction of k in some cases(with strong Landau damping in some directions andstrong instabilities in other directions, for example), ornon-steady-state cases involving zonal flows exhibitingpredator-prey dynamics.
Markovian closures such as the test-field model(TFM) or Orszags eddy-damped quasinormal Markovian(EDQNM) closure have been extensively used to studyturbulence in incompressible fluids and plasmas. Theintroduction of BKO1 provides useful discussions of thebackground of the DIA and Markovian closures, and wewill add just a few remarks here (there are also manyreviews on these topics, such as Refs. 3,812). The RMC
developed in BKO1 is similar to the EDQNM, but hasfeatures that ensure realizability even in the presence ofthe linear wave phenomena exhibited by plasmas (e.g.drift waves) and rotating planetary flows (e.g. Rossbywaves). Realizability is a property of a statistical clo-sure approximation that ensures that, even though it isonly an approximate solution of the original equations,it is an exact solution to some other underlying stochas-tic equation, such as a Langevin equation. The absenceof realizability can cause serious physical and numericalproblems, such as the prediction of negative or even di-vergent energies. The RMC reduces to the DIA-basedversion of the EDQNM in a statistical steady state, so
in some cases the issue of realizability is only importantin the transient phase as a steady state is approached orin freely decaying turbulence. Realizability may also beimportant in certain cases of recent interest among fusionresearchers where oscillations may occur between variousparts of the spectrum (such as predatorprey type oscil-lations between drift waves and zonal flows13,14) where asimple statistical steady state might not exist, or whereone is interested in the transient dynamics. Unlike someMarkovian models that differ only in the transient dy-
2
7/31/2019 Hammett-Bowman Generalized EDQNM
3/23
namics, the Multiple-Rate Markovian Closure presentedhere could also alter the steady-state spectrum.
Our results apply to a Markovian approximation ofthe DIA for a generic one-field system with a quadraticnonlinearity. They are immediately applicable to somesimple drift-wave plasma turbulence problems, Rossby-wave problems, or two-dimensional hydrodynamics. Fu-ture work could extend this approach to multiple fields,
similar to the covariant multifield RMC of BKO1
or theirlater realizable test-field model.2 Multiple field equationscan get computationally difficult (with the compute timescaling as n6, where n is the number of fields), thoughtwo-field studies have been done6 and disparate scaleapproximations15 or other approximations16 might makethem more tractable. In addition to their direct usein studying turbulence in a wide range of systems, theMarkovian closures discussed here might also be use-ful in deriving subgrid turbulence models for computersimulations.17,18
While our formulation is general and potentially ap-plicable to a wide range of nonlinear problems involvingMarkovian approximations, we were motivated by somerecent problems of interest in plasma physics and fusionenergy research, such as zonal flows.1922 Initial analyticwork elucidating the essentials of nonlinear zonal flowgeneration used weak-turbulence approximations23,24 orsecondary-instability analysis.25 Recent interesting workby Krommes and Kim15 uses a Markovian statistical the-ory to extend the study of zonal flows to the strong tur-bulence regime. An important question is why the stronggeneration of zonal flows seen near marginal stability isnot as important in stronger instability regimes (i.e., whyis the Dimits nonlinear shift finite?).2628 A strong tur-bulence theory is needed to study this. An alternativeapproach,27,28 which has been fruitful in providing the
main answers to the finite Dimits shift question, is toanalyze the secondary and tertiary instabilities involvedin the generation and breakup of zonal flows. That worksuggests that a complete strong-turbulence Markovianmodel of this problem would also need multi-field andgeometrical effects (involving at least the potential andtemperature fields, along with certain neoclassical effectsin toroidal magnetic field geometry).
Based on the reasoning immediately following Eq. (1)above, one might think that the assumption that the two-time correlation function and the Greens function areproportional to each other is rigorous only in the limitof white noise (which has an infinite decorrelation rate).
The Realizable Markovian Closure has been shown tocorrespond exactly to a simple Langevin equation (wherethe effects of the turbulence appear in nonlinear dampingand nonlinear noise terms), for which this might appearto be the implication. However, the mapping from statis-tically averaged equations (such as Markovian closures)back to a stochastic equation for which it is the solution,is not necessarily unique. In particular, the full DIA cor-responds to a generalized Langevin equation (Eq. (40)below), in which the damping term (t) in the sim-
ple Langevin equation is replaced by a time-history in-tegral operator. As we will find, it is then possible forthe two-time correlation function and the Greens func-tion to be proportional to each other even when the noisehas a finite correlation time. This allows the fluctuationdissipation theorem (which is rigorous in thermal equi-librium) to be satisfied without requiring the noise to bewhite (since the noise is not necessarily white in thermal
equilibrium). Thus the fluctuationdissipation ansatz ofBKO is a less restrictive assumption than one might haveat first thought. [It should be noted that previous Marko-vian models account implicitly for at least some non-white-noise effects. For example, in the calculation ofthe triad interaction time kpq = 1/(k + p + q) forthree-wave interactions, finite values of the assumed noisedecorrelation rate p + q are used.]
Nevertheless, there is still no reason in a general sit-uation that the two-time correlation function and theGreens function be constrained to be proportional toeach other. As described elsewhere, there may be regimeswhere the resulting differences between the decorrelationrate and the decay rate are significant.
The outline of this paper is as follows. Sec. (II)presents some of the essential ideas of this paper for avery simple Langevin equation, and includes a sectionmotivating the choice of the limit operator introduced byBKO1 to ensure realizability. Sec. (III) presents a moredetailed calculation of the non-white Markovian modelfor a simple Langevin equation, including the effects ofcomplex damping rates (to represent the wave frequency)and the issue of Galilean invariance. The model is com-pared with exact results in the steady-state limit, andthen an extension to time-dependent Langevin statisticsis presented (along with, in Appendix A, an alternativeproof of realizability for this case). Sec. (IV) presents the
notation of the full many-mode nonlinear equations wewill solve and summarizes the direct interaction approxi-mation (DIA), which is our starting point. Sec. (V) sum-marizes how the non-white Markovian approach is de-rived for the steady-state limit (with further details givenin Appendix B), while Sec. (VI) presents the full non-white Markovian approximation for the time-dependentDIA. Sec. (VII) discusses some important properties ofthese equations, including the limits of thermal equilib-rium and inertial range scaling, and some difficulties dueto the lack of random Galilean invariance in the DIA anddescribed in Appendix C. The conclusions include somesuggestions for future research.
II. SIMPLE EXAMPLES BASED ON THE
LANGEVIN EQUATION
Here we expand upon the analogy given in Sec. (I) us-ing a simple Langevin equation, which provides a usefulparadigm for understanding the essential ideas consid-ered in this paper. Since realizable Markovian closure
3
7/31/2019 Hammett-Bowman Generalized EDQNM
4/23
approximations to the DIA can be shown to correspondexactly to an underlying set of coupled Langevin equa-tions, the analogy is quite relevant. In this section wewill consider heuristic arguments based on some simplescalings; later sections will be more rigorous.
Consider the simple Langevin equation
t
+ (t) = f(t), (2)where is a damping rate and f is a random forcingor stirring term (also known as noise). [Here we nowforce Eq. (1) with the complex conjugate of f, for con-sistency with the form of the equations used later for ageneric quadratically nonlinear equation.] The statisticsof the noise are given by a specified two-time correla-tion function Cf(t, t
) = f(t)f(t). [In the white-noiselimit, Cf(t, t
) = 2D(t t), and the power spectrum ofthe Fourier-transform off(t) is independent of frequency,and is thus called a white spectrum.] The Langevinequation is used to model many kinds of systems exhibit-ing random-walk or Brownian motion features. Here we
can think of as the complex amplitude of one compo-nent of the turbulence with a specified Fourier wave num-ber k. Note that may be complex (representing bothdamping and wave-like motions) and represents both lin-ear and nonlinear (renormalized) damping or frequencyshifts due to interactions with other modes. The randomforcing f represents nonlinear driving by other modesbeating together to drive this mode.
The response function (or Greens function or propa-gator) for this equation satisfies
t+
R(t, t) = (t t), (3)
which easily yields R(t, t) = exp((t t))H(t t) if is independent of time, where H(t) is the Heavisidestep function. The solution to the Langevin equation
is just (t) =t0 dt R(t, t)f
(t) (for the initial condition(0) = 0). It is then straightforward to demonstrate thestandard result that, if f is white noise and the long-time statistical steady-state limit is considered, then thecorrelation function for is
C(t, t).
= (t)(t) = C0 exp((t t))for t > t, where C0 = 2D/( + ) (we emphasize def-initions with the notation
.=). [For t < t, one can use
the symmetry condition C(t, t
) = C
(t
, t).] That is,the decorrelation rate for is just . This is equivalentto the assumption in a broad class of Markovian modelsthat the decorrelation rate for is the same as the decayrate of the response function.
However, consider the opposite of the white-noise limit,where f varies slowly in time compared to the 1/ timescale. Then the solution of Eq. (2) is approximately(t) = f(t)/, and the decorrelation rate for willbe the same as the decorrelation rate for f. In this
limit, the assumption in many Markovian models thatthe decorrelation rate is is not valid.
Denote the decorrelation rate for f as f, and thedecorrelation rate for as C. Then one might guessthat a simple Pade-type formula that roughly interpo-lates between the white-noise limit f and the op-posite red-noise limit f would be something like1/C 1/ + 1/f, or
C = f
+ f. (4)
In fact, we will discover in the next section that moredetailed calculations give similar results in the limit ofreal and f, though the formulas are more complicatedin the presence of wave behavior with complex and f.
We note that in many cases of interest, the noise decor-relation rate f turns out to be of comparable magnitudeto (for example, if the dominant interactions involvemodes of comparable scale). In this case, while the white-noise approximation is not rigorously valid, the correc-tions to the decorrelation rate considered in this paper
might turn out to be quantitatively modest, 50%. Fur-thermore, in the case of the full DIA and its correspond-ing generalized Langevin equation, we will find additionalcorrections that can, in some cases, offset the effects inEq. (4) and cause C to be closer to .
Before going on to the more detailed results in the nextsection, we consider the meaning of an operator intro-duced in the BKO1 derivations in order to preserve real-izability in the time-dependent case, where (t) varies intime and may be negative (transiently), representing aninstability. [In order for a meaningful long-time steady-state limit to exist, the net (which is the sum of lin-ear and nonlinear terms) must eventually go positive to
provide a sink for the noise term. But it is importantto preserve realizability during the transient times when may be negative.] Based on arguments about symme-try and the steady-state fluctuationdissipation theorem,they initially proposed a time-dependent ansatz of theform
C(t, t) = C1/2(t)C1/2(t)exp
tt
dt (t)
(5)
(for t > t), where C(t).
= C(t, t) is the equal-timecovariance. Later in their derivation, they state thatin order to ensure realizability, (t) in this expressionhad to be replaced with P((t)), where the operatorP() = Re H(Re ) + i Im prevents the real part ofthe effective in Eq. (5) from going negative.
Physically this makes sense for the following reasons.Consider Eq. (2) with white noise f (thus ignoring thenon-white-noise effects). Then in a normal statisti-cal steady state where (t) is constant and Re > 0,Eq. (5) properly reproduces the usual result C(t, t) =C0 exp(|t t|). However, if Re < 0 (which it mightdo at least transiently in the full turbulent system con-sidered later), then Eq. (2) cant reach a steady state,
4
7/31/2019 Hammett-Bowman Generalized EDQNM
5/23
and the solution is eventually (t) = 0 exp(t) =|(t)| exp(i Im t), after an initial transient phase.Thus C(t, t) = C1/2(t)C1/2(t) exp(i Im (t t)), inagreement with and providing an additional intuitive ar-gument for BKOs modified form of Eq. (5), includingthe P() operator. [There may be an initial phase wherethe noise term f in Eq. (2) dominates and causes C(t)to grow linearly in time, C(t) = (t)(t) = 2Dt. Buteventually the unstable term will become large enoughto dominate and lead to exponential growth of .]
The model we will introduce below replaces in Eq. (5)with a separate parameter C, and develops a formula torelate C to other parameters in the problem such as and f. In the white-noise limit, the formula for Cautomatically reproduces the effects of the P limitingoperator, as will be described in the next section andin Appendix (A). But numerical investigation of non-white noise with wave dynamics (Im = 0 or Im f = 0)uncovered cases where the P limiting operator is stillneeded to ensure realizability. This will be explained atthe end of Sec. (IIIC).
We considered naming the method described in thispaper the Non-White Markovian Closure since, for thesimple Langevin equation considered here and in the nextsection, the decorrelation rate and the decay rate areequal only in the white-noise limit, and this approach al-lows these rates to differ. [Alternatively, to emphasizethe flexibility of this method one might have called it theColored-Noise Markovian Closure since instead of beingrestricted to white-noise (a uniform spectrum) we can al-low a noise spectrum of width Re f peaked nearan arbitrary frequency Im f. In other words, thisclosure can model spectra with a range of possible col-ors.] However, as we will discuss further, while a simpleLangevin equation is sometimes used to demonstrate re-
alizability of Markovian approximations, the DIA is actu-ally based on a generalized Langevin equation involvinga non-local time-history integral (compare Eq. (2) withEq. (40)). Because non-white fluctuations enter not onlyby making the noise term non-white but also by affectingthis time-history integral, it is possible for the decay-rateand the decorrelation rate to be equal even in some caseswhere the noise is not white (as indeed is the case in ther-mal equilibrium where the fluctuationdissipation theo-rem must hold but the noise is not necessarily white). Wethus favor the name Multiple-Rate Markovian Closure(MRMC), to emphasize that the method developed hereis a generalization of the previous Realizable Markovian
Closure (RMC) to allow for multiple rates (i.e., separatedecay and decorrelation rates).
III. DETAILED DEMONSTRATION OF THE
MULTIPLE-RATE MARKOVIAN METHOD
WITH THE LANGEVIN EQUATION
In this section, we demonstrate the Multiple-RateMarkovian approach starting with a simple Langevin
equation. The steps in the derivation are quite similarto the steps that will be taken in the following sectionsfor the case of the more complete DIA for more compli-cated nonlinear problems, and thus help build insight andfamiliarity. In this section, we will be introducing vari-ous approximations that may seem unnecessary for thesimple Langevin problem, which can be solved exactlyin many cases (for simple forms of the noise correlation
function). But these are the same approximations thatwill be used later in deriving Markovian approximationsto the DIA, and so it is useful to be able to test theiraccuracy in the Langevin case.
Our starting point is the Langevin Eq. (2), but weallow (t) to be a function of time, so that the solutionto Eq. (3) for the response function is
R(t, t) = exp
tt
dt (t)
H(t t) (6)
(instead of the solution given immediately after Eq. (3),which assumes that is independent of time). The solu-tion to the Langevin equation is
(t) = R(t, 0)(0) +
t0
dt R(t, t)f(t). (7)
In principle it is possible to calculate directly two-timestatistics like C(t, t) = (t)(t) from this, but inpractice it is often convenient to consider instead the dif-ferential equation for C(t, t)/t, which from Eq. (2)and Eq. (7) is
t+
C(t, t) = f(t)(t)
=t0
dt R(t, t)Cf(t, t), (8)
where the noise correlation function is defined asCf(t, t
) = (f(t)f(t), and we have assumed that theinitial condition (0) has a random phase. This equationis the analog of the DIA equations for the two-time corre-lation function (compare with Eq. (39a) and Eqs. (41)),but with an integral only over the noise and no nonlinearmodification of the damping term.
We define the equal-time correlation function C(t) interms of the two-time correlation function C(t, t) asC(t) = C(t, t) = (t)(t) (note that these two func-tions are distinguished only by the number of arguments).
Then
C(t)
t+ 2Re C(t) = 2Re
t0
dt R(t, t)Cf(t, t). (9)
This is the analog of the DIA equal-time covariance equa-tion, Eq. (42).
5
7/31/2019 Hammett-Bowman Generalized EDQNM
6/23
A. Langevin statistics in the steady-state limit
Consider the steady-state limit where t, t (butwith finite time separation t t), and assume the noisecorrelation function has the simple form Cf(t, t
) =Cf0 exp[f(t t)] for t > t. In this section we as-sume and f are time-independent constants. Theresponse function reduces back to its steady-state form
R(t, t) = exp[(tt)]H(tt). Then Eq. (9) in steadystate gives
C0.
= limt
C(t) = Cf0Re( + f)
Re()( + f)( + f). (10)
Writing = +i and f = f+if in terms of their realand imaginary components, and denoting the frequencymismatch = + f (remember, because the complexconjugate f is used as the forcing term, resonance occurswhen Im() = Im(f)) this can be written as
C0 =Cf0
(+ f)
(+ f)2 + ()2. (11)
This has a familiar Lorentzian form characteristic of res-onances.
To find the two-time correlation function, the time in-tegral in Eq. (8) can be evaluated for t > t to give
t+
C(t, t) =
Cf0 + f
exp[f(t t)]. (12)
With the steady-state boundary condition C(t = t, t) =C0, this can be solved to give
C(t, t) = C0
1 Re()( + f)
Re( + f)(
f)
exp[(t t)]
+ C0Re()( + f)
Re( + f)( f)exp[f(t t)]. (13)
In the white-noise limit, |f| ||, this reduces to thestandard simple result C(t, t) = C0 exp[(t t)]. Butin the more general case of non-white noise, the two-time correlation function is more complicated. [Despitethe apparent singularity in the denominator, it is can-celled by the exponentials so that C(t, t) is well-behavedin the limit f.] In the context of the turbulent in-teraction of many modes, Cf(t, t
) and thus C(t, t) maybe very complicated functions. Even if the noise cor-relation function has a simple exponential dependenceCf(t, t) exp[f(t t)], we see that the resulting cor-relation function for is more complicated.
Consider the task of fitting this complicated C(t, t)with a simpler model of the form
Cmod(t, t) = C0 exp[C(t t)] (14)
(for t > t). One way to define the effective decorrela-tion rate C might be based on the area under the timeintegral,
t
dt Cmod(t, t) =
C0C
=
t
dt C(t, t). (15)
This can be evaluated either by directly substitutingEq. (13), or by taking a time average of Eq. (12); thesame answer results either way. It turns out that in thelater versions of this calculation it is easier to determineC by integrating the governing differential equation over
time. Operating on Eq. (12) witht dt
and usingt
dtC(t, t)
t=
t
t
dt C(t, t) C(t, t), (16)
we find
1
C=
1
+
Re()( + f)
Re( + f) f. (17)
This recovers the white-noise limit f and the red-noise limit f discussed in Sec. II. In the limit ofreal and real f it simplifies to the Pade approxima-tion C = f/( + f) also suggested in the introduc-
tion. However, there is a problem with Eq. (17) related toGalilean invariance. Suppose we make the substitutions = exp[i2t] and f
= f exp[i2t] into the LangevinEq. (2). Then it can be written as
t+
= f(t), (18)
where = + i2, and the results should be thesame if written in terms of the transformed variables.In particular, the correlation function should trans-form as (t)(t) = exp[i2(t t)](t)(t) =exp[i2(t t)]C(t, t). Thus the decorrelation rate Cfor should be related to the decorrelation rate C for by C = C + i2. The decorrelation rate for the trans-formed noise term f also transforms as f =
f + i2.
In the case of fluid or plasma turbulence where rep-resents the amplitude of a Fourier mode exp[ik x]and f represents the amplitude of two modes with wavenumbers p and q beating together to drive the k mode(so p + q = k), these transformations correspond to aGalilean transformation to a moving frame x = x0 + vt,with 2 = k v.
So all results should be independent of 2 under thetransformation = i2, f = f i2, (thusf = f + i2), C = C i2. Eq. (11) satisfies this,but Eq. (17) fails this test. This problem and its solu-tion is described in the review paper by Krommes,29 whoshows it is related to other differences in various previousMarkovian closures. The problem can be traced to thedefinition of Eq. (15), which doesnt satisfy the invari-ance for general forms ofC(t, t). For example, we couldhave multiplied the integrand in Eq. (15) by an arbitraryweight function (such as exp[i2(t t)]) before takingthe time average, and the results would have changed.The way to fix this problem is to do the time average in
6
7/31/2019 Hammett-Bowman Generalized EDQNM
7/23
a natural frame of reference for that accounts for itsfrequency dependence. This leads us to the definition:
C20C + C
.=
t
dt Cmod(t, t)C(t, t). (19)
This corresponds to fitting Cmod(t, t) to C(t, t) by re-
quiring that both effectively have the same projection
onto the function Cmod(t, t
). [As Krommes29
points out,using the invariant definition Eq. (19) instead of Eq. (15)is a non-trivial point needed to ensure realizability andavoid spurious nonphysical solutions in some cases.]
Operating on Eq. (12) witht dt
Cmod(t, t), using a
generalization of Eq. (16), and doing a little rearrangingyields
C = Cf0(C + C)
C0( + f)(C +
f)
. (20)
This is properly invariant to the transformation describedin the previous paragraph. Solving for C while leaving
C on the other side of the equation, eventually leads to
C =fRe( + f) + i
C Im(
f)
( + C)Re( + f) + (f +
)Re(f). (21)
If we consider the limit where , f, and thus C are allreal, this simplifies to the form
C =f
+ f + C. (22)
This is similar to (but more accurate than) the rough in-terpolation formula Eq. (4) suggested in the introduction.This kind of recursive definition, with C appearing on
both sides, is a common feature of the steady-state limitof theories based on the renormalized DIA equations, andcan be solved in practice by iteration, or by consideringthe time-dependent versions of the theories. In Eq. (22)with real coefficients, one can easily solve this equationfor C, but the solution is much more difficult in the caseof complex coefficients in Eq. (21). The resulting calcula-tion is laborious, so we used the symbolic algebra pack-age Maple30 to solve for C with complex coefficients.Looking at the real and imaginary parts of Eq. (21) sep-arately eventually leads to a quadratic equation and a lin-ear equation to determine the real and imaginary partsof C. Unfortunately it takes 16 lines of code to write
down the resulting closed-form solution (though perhapsthere are common subexpressions that would simplify it).(Maple worksheets that show this calculation and checkother main results in this paper are available online.31)This is tedious for humans but easy to evaluate in For-tran, C, or other computer language. On the other hand,this is only helpful for the simple Langevin problem any-way since direct solution is not really practical for thefull nonlinear problem considered by the DIA, where thenoise term of the Langevin equation is replaced by a sum
over many modes. In many cases of interest, the noisedecorrelation rate f turns out to be comparable in mag-nitude to , so iteration of Eq. (21) usually convergesquickly. (However, there are limits where convergenceis slow, such as some strongly non-resonant cases whereRe is very close to Re f and both are very small com-pared to Im(f + ).) The other option is to considerthe time-dependent problem, the topic of the subsection
after next, which effectively performs an iteration in timeas a steady state is approached.
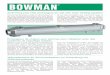
= 4f
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 1fwn
modelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 0.25f
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
2 4 6 8 10 12 14
FIG. 1. ReC(t, t)/C0 vs. t t, for the exact Langevin re-
sult of Eq. (13), for the Multiple-Rate model with decorrela-tion rate C given by Eq. (21), and for the simple white-noiseassumption C(t, t) = C0 exp(|t t
|). Time is normalizedsuch that = 1, and the value off is noted in each figure.
7
7/31/2019 Hammett-Bowman Generalized EDQNM
8/23
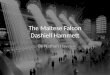
= 0.25 - 4 if
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 0.25 - 4 if
wnmodelexact
Im C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
FIG. 2. Real and imaginary parts ofC(t, t)/C0 vs. t t,
for the same three functions as in Fig. 1, but withf = 0.25 4i. Note that ImC = 0 for the white-noise casein this and later figures.
= 1 - if
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 1 - if
wnmodelexact
Im C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
FIG. 3. Real and imaginary parts ofC(t, t)/C0 vs. t t,
for the same three functions as in Fig. 1, but with f = 1 i.
= 1 - 4 if
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 1 - 4 if
wnmodelexact
Im C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
FIG. 4. Real and imaginary parts ofC(t, t)/C0 vs. t t,
for the same three functions as in Fig. 1, but with f = 14i.
= 1 - 16 if
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 1 - 16 if
wnmodelexact
Im C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
FIG. 5. Real and imaginary parts ofC(t, t)/C0 vs. t t,
for the same three functions as in Fig. 1, but with f = 116i.
8
7/31/2019 Hammett-Bowman Generalized EDQNM
9/23
= 4 - 16 if
wnmodelexact
Re C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
= 4 - 16 if
wnmodelexact
Im C(t,t)
t-t
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5
FIG. 6. Real and imaginary parts ofC(t, t)/C0 vs. t t,
for the same three functions as in Fig. 1, but with f = 416i.
B. Comparison of the Multiple-Rate model with
exact Langevin result
Figs. (1-6) provide a comparison of the exact andmodel results for various parameters. The exactLangevin solution for C(t, t)/C0 is given by Eq. (13).
The curves labeled model are for the Multiple-RateMarkovian model Cmod(t, t
)/C0 = exp(C|t t|),where C is obtained by solving Eq. (21). The curveslabeled wn are the results for a simple white-noise as-sumption C(t, t)/C0 = exp(|t t|). The plots showboth the real and imaginary parts ofC(t, t), except whenC(t, t) is purely real.
The results are shown in Figs. (1-6) for a varietyof parameters. We choose = 1 as a standard nor-malization in all cases. Only the frequency mismatch( = Im( f)) between the oscillator and the ran-dom driving term and the relative decorrelation rate(Re(f)/ Re()) can matter. Thus we choose a frame
of reference where Im = 0 and any frequency mismatchis reflected in the value of the noise frequency Im f.These comparisons show that the non-white-noise
Multiple-Rate model for C does fairly well in most cases.All formulas of course agree well in the white-noise limitof Re f Re . The errors of the white-noise model areparticularly large in the red-noise limit Re f Re ,though they are noticeable even if Re f Re . Thewhite-noise model has a purely real correlation func-tion in all cases, thus missing the frequency shifts that
arise when Im f = 0, while the multiple-rate modeldoes a fairly good job of capturing the real and imag-inary parts of C(t, t) in most cases. The most challeng-ing case for even the multiple-rate model is depicted inFig. (5), where there is a large frequency mismatch butcomparable decorrelation rates, Re f Re . However,Eq. (11) shows that the amplitude, C0 2Cf0/()2 2Cf0/(Im( f))2, will be small in this strongly non-resonant case, and perhaps does not matter much com-pared to resonant interactions in realistic many-modeturbulence cases. Strongly non-resonant cases are eas-ier to model with disparate values of Re f and Re , asshown in Fig. (6) and Fig. (2), because interference effectsare less important. To do better for the non-resonant casewith Re f Re would probably require a more elab-orate two-exponential model than Eq. (14), to allow forthe constructive and destructive interference effects rep-resented in Fig. (5). Of course, for the simple Langevincase of this section, such a model could exactly repro-duce Eq. (13), although for more complicated cases itwould again become a model to be fit to the true C(t, t)dynamics. (Another approach, which might improve thelong-time fit a bit, might be to use Cmod(t, t
)(tt) as theweight function in Eq. (19) instead of just Cmod(t, t
).)
C. Time-dependent Langevin statistics
We now return our attention to the more generalLangevin problem with time-dependent (t) and time-varying statistics for the noise term f(t). That is, forgenerality, we also allow the noise amplitude (given bythe equal-time covariance Cf(t)
.= Cf(t, t)) and the noise
decorrelation rate to vary in time. Our choice of a self-consistent model for Cf(t, t
) to accomplish this is moti-
vated by BKOs demonstration that the following formis a realizable correlation function:
Cf(t, t) = C1/2f (t)exp
tt
dt f(t)
C1/2f (t) (23)
(for t t). [BKO show this is realizable as long asRe(f(t)) 0 almost everywhere.] Using this expres-sion, Eq. (9) can be written as
C(t)
t+ 2Re (t)C(t) = 2Re C
1/2f (t)
(t), (24)
where
(t) .=t0
dt R(t, t)expt
t
dtf(t)
C1/2f (t). (25)
Taking the time derivative of this expression, and usingEq. (6), leads to
(t)
t= [(t) + f(t)](t) + C1/2f (t), (26)
which is more convenient to use in a time-dependent cal-culation than Eq. (25). The initial condition is (0) = 0.
9
7/31/2019 Hammett-Bowman Generalized EDQNM
10/23
Eq. (24) and Eq. (26) can be used to determine theequal-time covariance C(t), but how can we determinethe decorrelation rate C from the two-time correlationfunction C(t, t)? [In the full nonlinear equations usedfor the DIA, for one mode appears in noise terms forother modes, and so we would like to know the decorre-lation rate as well as the amplitude C(t).] Even in thesteady-state limit of the previous section, we found that
the full two-time correlation function C(t, t
) had a morecomplicated form than a simple exponential, and so wefit a simpler model Cmod(t, t
) to it in order to determinean effective decorrelation rate C.
We follow a similar procedure here. We again useBKOs form for a realizable time-dependent two-time cor-relation function to provide a model of C(t, t),
Cmod(t, t) = C1/2(t)exp
tt
dt C(t)
C1/2(t)
(27)
(for t t). Consider the integral
A(t) =
t
0
dt Cmod(t, t)C(t, t). (28)
This is the time-dependent analog of Eq. (19). Ratherthan try to use this to determine C directly, it is moreconvenient to again take time derivatives. If C(t, t) inEq. (28) is replaced with Cmod(t, t) of Eq. (27), then
A(t)
t= C2(t) [C(t) + C(t)]A +
1
C(t)
C(t)
tA. (29)
If we instead calculate A/t with the full C(t, t) inEq. (28), and use Eq. (8) to evaluate C(t, t)/t, then
A(t)t = C2(t) [(t) + C(t)]A + 12C(t) C(t)t A
+ 3(t)C1/2(t)C
1/2f (t), (30)
where
3(t) =
t0
dtCmod(t, t
)
C1/2(t)
t0
dt R(t, t)Cf(t, t)
C1/2f (t)
. (31)
Taking the time derivative of this, and using Eq. (23) forCf(t, t), gives
3(t)
t= C1/2(t)(t) [C(t) + f(t)]3(t). (32)
Equating Eq. (29) and Eq. (30), one can then solvefor the effective decorrelation rate C. Using Eq. (24) toeliminate the C(t)/t term, the result is
C(t) = P
(t) Re (t) + C1/2f (t)Re(t)
C(t)
3(t)C
1/2(t)C1/2f (t)
A(t)
, (33)
where we have added the P operator to enforce realiz-ability for the reasons discussed below. Here P(z) = zif Re z 0 and P(z) = i Im z if Re z < 0. SubstitutingEq. (24) into Eq. (29) gives
A(t)
t= C2(t) 2Re((t) + C(t))A(t)
+ 2Re (t)
C1/2f (t)
C(t) A(t). (34)
Eqs. (24), (26), and (32-34) provide a complete set ofequations that can be integrated forward in time. Theycomprise a Markovian closure theory (including non-white noise effects) for the time-dependent Langevinequation. The relevant initial conditions are discussedbelow. This set of equations can be used to determinethe amplitude C(t) and the effective decorrelation rateC(t) used to model the two-time behavior C(t, t
).In a normal long-time statistical steady state, where ,
f and Cf are constants (and Re() > 0 and Re(f) > 0),then one can show that the second and third terms on the
right-hand side of Eq. (33) cancel and that it reproducesthe steady-state result for C in Eq. (20).
Consider the behavior of these equations in an unstablecase, with Re = < 0. For simplicity, assume thecoefficients , f and Cf are all constant in time, withRe(f) > 0. Then one can show that C(t) eventuallygrows as exp(2t), while (t) exp(( f)t) growsmore slowly, so that the third term on the right-hand sideof Eq. (33) vanishes. The fourth term on the right-handside of Eq. (33) also vanishes because 3 exp(2t)while A exp(4t). In this limit, C = Re().
Thus with constant coefficients, the two cases of pos-itive or negative Re will, at least in the long-time
limit, naturally reproduce the limiting operator P() =Re H(Re ) + i Im , which was introduced by BKO1to preserve realizability for the assumed form of C(t, t)in Eq. (27). In the white-noise limit f , i t i sstraightforward to show that realizability is ensured forall time, not just in the long-time limit (see also Ap-pendix (A)). These results might suggest that the Pop-erator in Eq. (33) is not needed, if its argument alwayshas a positive real part anyway. However, by numeri-cally integrating Eqs. (24), (26), and (32-34), we havefound cases where this is not true and the Poperator isneeded in Eq. (33) to enforce the realizability conditionRe C 0. [Without the P operator, Re C will tran-siently go negative in some strongly non-resonant cases
such as = 1 and f = 0.25 + 16i.] Eqs. (24, 26) are anexact system of equations for the equal time covarianceC(t) for Langevin dynamics, which ensures that C(t) isalways positive. But according to Theorem 2 of BKO1
(and Appendix A of the present paper), Re C 0 isnecessary for Cmod(t, t
) as given by Eq. (27) to be arealizable two-time correlation function. This may beimportant if Cmod(t, t) is in turn used in a noise termdriving some other Fourier mode.
10
7/31/2019 Hammett-Bowman Generalized EDQNM
11/23
Formally, the initial conditions for this system of equa-tions require some care to handle an apparent singular-ity, but in practice this should not be a problem. Witha finite initial (0) in Eq. (7), the initial conditions forthe Markovian closure equations are (0) = 0, A(0) = 0,3(0) = 0, and C(0) = C1. For short times, we then have
C(t) C1, (t) C1/2f t. If C is finite, then for shorttimes we also have A(t) = C21 t and 3 = (C1Cf)
1/2t2/2.
It follows from Eq. (33) that C = Re + tCf/(2C1)for short times, which is a consistent solution that is fi-nite and continuous, resolving the 0/0 ambiguity in thelast term of Eq. (33). In a numerical code, it is conve-nient to use the initial conditions (0) = 0, 3(0) = 0(thus assuming the initial noise Cf = 0), C(0) = C1, andA(0) = C21t, where t is a time step smaller than anyother relevant time scales in the problem.
IV. FORMULATION OF THE FULL NONLINEAR
PROBLEM AND STATISTICAL CLOSURES
In this section we provide background on the generalform of the nonlinear problem we are considering andon the general theory of statistical closures. In partic-ular we will write down Kraichnans direct-interactionapproximation, which is the starting point of our calcula-tion. This section borrows heavily from the BKO paper1
(including some of their wording), but is provided forcompleteness to define our starting point.
A. The fundamental nonlinear stochastic process
Consider a quadratically nonlinear equation, written
in Fourier space, for some variable k:
t+ k
k(t) =
12
k+p+q=0
Mkpqp(t)
q(t). (35)
Here the time-independent coefficients of linear damp-ing k and mode-coupling Mkpq may be complex. Givenrandom initial conditions, we seek ensemble-averaged(or, if the system is ergodic, time-averaged) moments ofk(t), taking for simplicity the mean value of k to bezero.
Many important nonlinear problems can be repre-sented in this form with a simple quadratic nonlinearity.
For example, the two-dimensional NavierStokes equa-tion for neutral fluid turbulence can be written in thisform, where represents the stream function such thatthe velocity v = z, and Mkpq = zpq(q2p2)/k2.Other examples include Charneys barotropic vorticityequation for planetary fluid flow, and a class of two-dimensional plasma drift wave turbulence problems (suchas the HasegawaMima equation or the TerryHortonequation). Some three-dimensional one-field plasma tur-bulence problems can also be written in this form since
the dominant E B nonlinearity acts only in two dimen-sions perpendicular to the magnetic field. The three-dimensional NavierStokes equations and general multi-field plasma turbulence equations can also be written inthe form of Eq. (35) if k is considered as a vector andk and Mkpq become matrices or tensors. In fact, BKO
1
consider covariant multiple-field formulations of the DIAand Markovian closures. Here we will focus on the one-
field case, where k is a scalar amplitude for mode k.For each k in Eq. (35), the summation on the right-hand-side involves a sum over all possible p and q thatsatisfy the three-wave interaction k +p + q = 0 (this issometimes expressed as k = p+ q, but the reality condi-tions k =
k has been used to rearrange it). Without
any loss of generality one may assume the symmetry
Mkpq = Mkqp. (36)
Another important symmetry possessed by many suchsystems is
kMkpq + pMpqk + qMqkp = 0 (37)
for some time-independent nonrandom real quantity k.[See Refs. 32 and 33 for the relation between this sym-metry and the Manley-Rowe relations for wave actions.]Equation (37) is easily shown to imply that the nonlin-ear terms of Eq. (35) conserve the ensemble-averaged
total generalized energy E.
= 12
k k|k(t)|2. [Thenonlinear terms also conserve the generalized energy ineach individual realization, although we will be focus-ing on ensemble-averaged quantities, where . . . denotesensemble-averaging.] For some problems, Eq. (37) maybe satisfied by more than one choice of k; this impliesthe existence of more than one nonlinear invariant. For
example, in the case of two-dimensional hydrodynamics,Eq. (37) is satisfied for both k = k2 and k = k
4, whichcorrespond to the conservation of energy and enstrophy,respectively.
We define the two-time correlation function Ck(t, t)
.=
k(t)k(t) and the equal-time correlation functionCk(t)
.= Ck(t, t) (note that the two functions are distin-
guished only by the number of arguments), so that E =12
k kCk(t). In stationary turbulence, the two-time
correlation function depends on only the difference of itstime arguments: Ck(t, t
).
= Ck(t t). The renormalizedinfinitesimal response function (nonlinear Greens func-tion) Rk(t, t
) is the ensemble-averaged infinitesimal re-sponse to a source function Sk(t) added to the right-handside of Eq. (35) for mode k alone. As a functional deriva-tive,
Rk(t, t)
.=
k(t)
Sk(t)
Sk=0
. (38)
We adopt the convention that the equal-time responsefunction Rk(t, t) evaluates to 1/2 [although lim0+Rk(t + , t) = 1].
11
7/31/2019 Hammett-Bowman Generalized EDQNM
12/23
B. Statistical closures; the direct-interaction
approximation
The starting point of our derivation will be the equa-tions of Kraichnans direct-interaction approximation(DIA), as given in Eqs. (6-7) of BKO,1 and reproducedbelow as Eqs. (39-41).
The general form of a statistical closure in the absence
of mean fields is
t+ k
Ck(t, t
) +
t0
dt k(t, t)Ck(t, t)
=
t0
dt Fk(t, t)Rk(t, t), (39a)
t+ k
Rk(t, t
) +
tt
dt k(t, t)Rk(t, t)
= (t t). (39b)While these equations (with the expressions for k and
Fk given below) are an approximate statistical solutionto Eq. (35), they are the exact statistical solution to ageneralized Langevin equation
t+ k
k(t) +
t0
dt k(t, t)k(t) = fk(t), (40)
where k is the kernel of a non-local damping/propaga-tion operator, and Fk(t, t) = fk(t)fk (t). These equa-tions specify an initial-value problem for which t = 0 isthe initial time.
The original nonlinearity in Eq. (35) gives rise to twotypes of terms in Eqs. (39): those describing nonlineardamping (k) and one modeling nonlinear noise (
Fk).
The nonlinear damping and noise in Eqs. (39) are deter-mined on the basis of fully nonlinear statistics.
The direct-interaction approximation provides specificapproximate forms for k and Fk:
k(t, t) =
k+p+q=0
MkpqMpqkR
p(t, t)C
q(t, t), (41a)
Fk(t, t) = 12
k+p+q=0
|Mkpq|2Cp(t, t)Cq(t, t). (41b)
These renormalized forms can be obtained from the for-mal perturbation series by retaining only selected terms.
While there are infinitely many ways of obtaining a renor-malized expression, Kraichnan34 has shown that most ofthe resulting closed systems of equations lead to phys-ically unacceptable solutions. For example, they mightpredict the physically impossible situation of a negativevalue for Ck(t, t) (i.e., a negative energy)! Such behaviorcannot occur in the DIA or other realizable closures.
The DIA also conserves all of the same generalized en-ergies (12
k k|k(t)|2) that are conserved by the prim-
itive dynamics. To show this important property, it is
useful to write the equal-time covariance equation in theform
tCk(t) + 2Re Nk(t) = 2Re Fk(t), (42a)
where
Nk(t).
= kCk(t)
k+p+q=0MkpqM
pqk
pqk(t), (42b)
Fk(t).
= 12
k+p+q=0
|Mkpq|2kpq(t), (42c)
kpq(t).
=
tt0
dt Rk(t, t) Cp(t, t) Cq(t, t), (42d)
given initial conditions at the time t = t0 (unless other-wise stated, we will take t0 = 0). As shown in BKO,
1
the symmetries (36) and (37) ensure that Eq. (42a)conserves all quadratic nonlinear invariants of the formE .= 12
k kCk(t) in the dissipationless case where
Re k = 0. The Markovian closures that BKO1 devel-
oped, and that we extend here, preserve the structure ofEqs. (42) and so have all of the same quadratic nonlinearconservation properties as the original equations. [Onecan show that Fk is always real, so the Re operation onFk in Eq. (42a) is redundant.]
The DIA equations (39) and (41) provide a closed setof equations, but are fairly complicated because they in-volve convolutions over two-time functions. Their generalnumerical solution requires O(N3t ) operations, or O(N2t )operations in steady state. As described in BKO1 andKrommes,3 a Markovian approximation seeks to simplify
this complexity by parameterizing the two-time functionsin terms of a single decorrelation rate. Our approach hereis essentially to generalize this to allow several rate pa-rameters to be used, to allow the decorrelation rate forCk(t, t
) to differ from the decay rate for Rk(t, t).
V. RESPONSE FUNCTIONS IN A STATISTICAL
STEADY STATE
Markovian models provide approximations that cansimplify the integrals in Eqs. (39). For insight, we willfirst investigate the long-time limit where a statistical
steady-state should be reached, so that the two-time cor-relation function C(t, t) and response function R(t, t)can depend only on the time difference tt. In a statisti-cal steady state, all of the Markovian models in BKO1 usea simple exponential behavior for Ck(t, t
) and Rk(t, t).
Here we will assume the model forms
Rmod,k(t, t) = exp(k(t t))H(t t) (43)
and
12
7/31/2019 Hammett-Bowman Generalized EDQNM
13/23
Cmod,k(t, t)
.=
C0k exp(Ck(t t)) for t t,C0k exp(Ck(t t)) for t < t.
(44)
Note that k is the decay rate for the infinitesimal re-sponse function Rk, while Ck is the decorrelation ratefor Ck(t, t
).Inserting Eq. (41a) into Eq. (39b) and using the ex-
ponential forms of Eq. (43) and Eq. (44) in the integralsyields
t+ k
Rk(t, t
) = (t t)
+
k+p+q=0
MkpqMpqkC0qH(t t)
tt
dt exp((p + Cq)(t t) k(t t)). (45)
Evaluating the integral gives
t
+ kRk(t, t) = (t t)
+
k+p+q=0
MkpqMpqkC0q
p + Cq k
H(t, t)
exp(k(t t)) exp((p + Cq)(t t)) . (46)The solution to this equation for t > t is
Rk(t, t) = exp(k(t t))
+
k+p+q=0
MkpqMpqkC0q
p + Cq k
exp(k(t t)) exp(k(t t))
k
k
exp(k(t t)) exp((p + Cq)(t t))
p + Cq k
. (47)
Clearly this is not strictly consistent with the simple ex-ponential form for Rk assumed in Eq. (43) and used toevaluate the integrals in Eq. (39b). We will instead fit themodel Eq. (43) to Eq. (47), in the same way that we didin the Langevin case for Eq. (19). Requiring that bothEq. (43) and the full Eq. (47) give the same weightedaverage over time (where Rmod,k is used as the weight to
ensure invariance to frequency shifts) gives
1
k + k
.=t
dt Rmod,k(t, t)Rk(t, t). (48)
Inserting Eq. (47) on the right-hand side, and carryingout a few lines of algebra, the result is
1
k + k=
1
k + k
+
k+p+q=0
MkpqMpqkC0q
(k + k)(k + k)(
p +
Cq +
k)
. (49)
A little rearranging leads to
k.
= k
k+p+q=0
MkpqMpqkC0q
k + p +
Cq
. (50)
Note that this has a similar form to the steady-state de-cay rate in the DIA-based EDQNM, such as in Eq. (39b)of BKO1 (but with their q replaced by
Cq).
One can go through a similar calculation of Ck(t, t),and calculate its weighted time average to determine thedecorrelation rate Ck. We will not do so now, as onecan instead just take the steady-state limit of the resultsin the next section. Eq. (50) can also be obtained fromthe steady-state limit of the results in the next section,and so provides a useful cross-check.
We note that there is some flexibility in the choice ofweighting in Eq. (48). We could use Cmod,k(t, t
) as the
weight instead of Rmod,k(t, t). Either choice preserves
Galilean invariance. Using this alternate weight, Eq. (48)becomes
Ck0k + Ck.=t
dt Cmod,k(t, t)Rk(t, t) (51)
and the resulting expression for k is like Eq. (50) butwith k on the right-hand side of Eq. (50) replaced byCk, which would automatically agree with the steady-state k to be defined in Eq. (71). But it turns out thatthe main steady-state results of Sec. (VII) hold with ei-ther choice of weights, and it seems more symmetric andmakes more sense as a standard fitting procedure to useRmod,k as the weight for integrating Rk in Eq. (48). Thisraises the question of whether to use Cmod,k or R
mod,k as
the weight function for time averages of Ck(t, t), as we
will do in the next section. We can resolve this ambiguityby going back to the steady-state Langevin problem ofSec. (IIIA). If one tries to use R(t, t) as the weight inEq. (19), so that it becomes
C0C +
.=
t
dt exp((t t))C(t, t), (52)
then one can go through the same steps used to deriveEq. (22) and find that in the limit of real coefficientsit gives C = f/(2 + f). In the red-noise limitf , this gives C = f/2, which is a factor of 2off from the correct result (C = f) for the red noiselimit. Thus, we will use Cmod,k(t, t
) as the weight for
taking time-averages ofCk(t, t) and use Rmod,k(t, t) fortime-averaging Rk(t, t
). The weighting choices might bereconsidered in a multi-field generalization of a Marko-vian closure, where the requirement of covariance mayimpose constraints on the choice of the weight functions,but it seems that the symmetric choices made here aremost likely to generalize well.
13
7/31/2019 Hammett-Bowman Generalized EDQNM
14/23
VI. TIME-DEPENDENT MULTIPLE-RATE
MARKOVIAN CLOSURE
Applying these techniques in a straightforward way tothe time-dependent DIA equations leads to the Multiple-Rate Markovian Closure (MRMC) equations. The two-time correlation function is modeled with the realizableform
Cmod,k(t, t) = C
1/2k (t)C
1/2k (t
)exp
tt
dt Ck(t)
(53)
(for t > t, with Cmod,k(t, t) = Cmod,k(t
, t) for t < t),and the response function is modeled as
Rmod,k(t, t) = exp
tt
dt k(t)
H(t t). (54)
Denoting kpq(t) = kpq(t)C1/2p (t)C
1/2q (t), and insert-
ing Eqs. (53-54) into Eq. (42d), we can write the equal-
time DIA covariance equations of Eq. (42) as
tCk(t) + 2Re k(t) Ck(t) = 2Fk(t), (55a)
k.
= k
k+p+q=0
MkpqMpqk
pqk(t) C
1/2q (t)C
1/2k (t),
(55b)
Fk.
= 12
k+p+q=0
|Mkpq|2kpq(t) C1/2p (t) C1/2q (t), (55c)
tkpq + (k + Cp + Cq)kpq = C
1/2p (t)C
1/2q (t),
(55d)
kpq(0) = 0. (55e)
This is very similar to the BowmanKrommesOtta-viani Realizable Markovian Closure (RMC) (as given byEqs. (66ae) of BKO1), but with the replacement of thesingle decay/decorrelation rate of the RMC with threedifferent rates in these equations. [Other Markovianmodels, such as the EDQNM closure, also use a singledecorrelation rate parameter.] If in Eq. (55d) we replacek = k, Cp = P(p), and Cq = P(q), then theseequations become identical to the RMC.
To summarize the three different rates used here:
k is the nonlinear energy damping rate for thewave energy equation for the equal-time covarianceCk(t) in Eq. (55a), and is defined in Eq. (55b);
k is the decay rate for the infinitesimal responsefunction Rk(t, t
) in Eq. (54), and is defined inEq. (61);
and Ck is the decorrelation rate for Ck(t, t) inEq. (53), and is defined in Eq. (69).
To determine k(t) and Ck(t), we follow a similarprocedure as we did for the time-dependent Langevin
equation in Sec. (IIIC). Define Ak(t) as the followingweighted time-average of Rk
Ak(t) =
t0
dtRmod,k(t, t)Rk(t, t
). (56)
If Rk(t, t) = Rmod,k(t, t
) as given by Eq. (54), then
Akt
= 1 (k + k)Ak, (57)
while if Rk(t, t) satisfies Eqs.(39b,41a), then
Ak
t = 1 (
k + k)Ak
+
k+p+q=0
MkpqMpqkC
1/2q
1,pqk, (58)
where
1,pqk(t) =t0
dt Rmod,k(t, t)
tt
dtCq(t, t)
C1/2q (t)
Rp(t, t)Rk(t, t). (59)
It is often more convenient to work with the differentialversion of this, which, after using Eqs. (53-54) to replaceCq(t, t
) and Rp(t, t) with their model forms, is
1,pqkt
= (k + Cq + p)1,pqk + C1/2q Ak(t) (60)
(with the initial condition 1,kpq(0) = 0)). Requiringthat Eq. (57) and Eq. (58) be equivalent determines kto be
k = k 1Ak
k+p+q=0
MkpqMpqkC
1/2q
1,pqk. (61)
The calculation of Ck proceeds in a similar way.ACk(t) is defined as a weighted time integral of Ck(t, t
):
ACk(t) =
t
0
dt Cmod,k(t, t)Ck(t, t
). (62)
If Ck(t, t) in this integral is replaced by Cmod,k(t, t
) asgiven by Eq. (53), then
ACkt
= C2k(t) +1
Ck(t)
Ck(t)
tACk (Ck + Ck)ACk,
(63)
14
7/31/2019 Hammett-Bowman Generalized EDQNM
15/23
(where we make the time dependence ofCk(t) explicit todistinguish it from the two-time Ck(t, t
)). If the exactdynamics for Ck(t, t
) given by Eqs. (39a,41) are used,then
ACkt
= C2k(t) +1
2Ck(t)
Ck(t)
tACk (Ck + k)ACk
+ k+p+q=0
MkpqMpqkC
1/2k C
1/2q
2,pqk
+1
2
k+p+q=0
|Mkpq|2C1/2k C1/2p C1/2q 3,kpq, (64)
where
2,pqk(t) =t0
dtCmod,k(t, t
)
C1/2k (t)
t0
dtCq(t, t)
C1/2q (t)
Rp(t, t)Ck(t, t) (65)
and
3,kpq(t) =t0
dtCmod,k(t, t
)
C1/2k
(t)
t0
dtCq(t, t)
C1/2q (t)
Cp(t, t)
C1/2p (t)
Rk(t, t). (66)
Using Eqs. (53-54), the differential versions of these are
2,pqkt
= (Ck + Cq + p)2,pqk
+Ck(t)pqk(t) +
C1/2q (t)
C1/2k (t)
ACk(t) (67)
and
3,kpqt
= (Ck + Cq + Cp)3,kpq+C
1/2k (t)
kpq(t). (68)
The quantity Ck is then determined by equatingEq. (63) and Eq. (64), yielding
Ck = k +1
2Ck(t)
Ck(t)
t
1ACk
k+p+q=0
MkpqMpqkC
1/2k C
1/2q
2,pqk
1
2ACk
k+p+q=0|Mkpq|
2
C1/2k C
1/2p C
1/2q
3,kpq, (69)
where Eq. (55a) could be used to eliminate Ck(t)/t. Asin Eq. (33) for the case of the time-dependent Langevinequation, while there are effects in this equation that willtend to give Re Ck 0, it may be necessary to modifythis equation to enforce realizability in all cases. This isdone by replacing this equation, of the form Ck = RHS,with Ck = P(RHS). Note that it is only Re Ck 0 that
is needed for realizability, while Re k can transientlygo negative (as it does in two-dimensional hydrodynam-ics because of the inverse cascade, or in some plasmaproblems where the zonal flows may become nonlinearlyunstable27,15,23). This is similar to BKOs treatment.1
The complete set of equations that constitutes theMultiple-Rate Markovian Closure (MRMC) are Eqs. (55)for the equal-time covariance Ck(t) and related quan-
tities, Eqs. (57,60,61) for quantities related to the re-sponse function, and Eqs. (63,67-69) for quantities re-lated to the two-time correlation function. The MRMCextends the RMC to make less restrictive assumptionsand include additional effects, but at the expense of afew new parameters. In addition to replacing the sin-gle decay/decorrelation rate of the RMC with 3 differentrates, k, k, and Ck, it also replaces the single triadinteraction time of the RMC with 4 different triad inter-action times, kpq, 1,kpq, 2,kpq, and 3,kpq. Eachof these triad interaction times has a different weightingof response functions and two-time correlation functions.While this increases the complexity some, the overallcomputational scaling of this system is still
O(N
t), a
significant improvement over the O(N2t ) or O(N3t ) scal-ing of the DIA.
VII. PROPERTIES OF THE MULTIPLE-RATE
MARKOVIAN CLOSURE
In a steady-state limit, Eq. (61) simplifies to
k = k
k+p+q=0
MkpqMpqkCq
k + p +
Cq
. (70)
The steady-state balance Re kCk = Fk from Eq. (55a)
simplifies to
Ck Re
k
k+p+q=0
MkpqMpqkCq
Ck + p +
Cq
=1
2
k+p+q=0
|Mkpq|2CpCqk +
Cp +
Cq
. (71)
[Note the subtle notational differences: the expressionfor k becomes the expression for k if
k on the RHS of
Eq. (70) is replaced by Ck.] Finally, Eq. (69) reduces to
Ck.
= k
(Ck +
Ck)
k+p+q=0
MkpqMpqkCq
(Ck + p + Cq)2
+1
2Ck
k+p+q=0
|Mkpq|2CpCq(Ck+
Cp+
Cq)(
k+
Cp+
Cq)
.
(72)
Thus the decorrelation rate Ck equals the response func-tion decay rate k plus the two correction terms in brack-ets. For the simple steady-state non-wave case with real
15
7/31/2019 Hammett-Bowman Generalized EDQNM
16/23
and positive s, the second correction term will causeCk to decrease (as expected for non-white noise), whilethe first term will usually have an offsetting opposite signand cause Ck to increase. The origin of these two termscan be traced back to the DIA Eq. (39a). The secondcorrection term corresponds to the usual effects of non-white noise (related to the integral involving Fk(t, t) inEq. (39a)), but the first correction term in Eq. (72) is
related to the time-history integral involving the renor-malized propagator k(t, t) in Eq. (39a). Thus non-whitefluctuations in other modes Cq(t, t) not only change thenoise term for the k mode, but also change the effec-tive damping from the time-history integral, broaden-ing the width of k(t, t) in time (if the fluctuations Cqwere treated as white noise, then Eq. (41a) would givek(t, t) (t t)).
An important property to demonstrate is that in ther-mal equilibrium it is possible for these two terms to can-cel exactly. Then the decorrelation rate and responsefunction decay rate are equivalent, Ck = k, and thefluctuationdissipation theorem is satisfied. To demon-strate that this is true, we assume the result (
Ck = k)
to simplify some of the equations and then show that thisis a self-consistent assumption. (Note also that ifCk =k, then k = k also.) Splitting the first summation inbrackets in Eq. (72) into two equal parts and interchang-ing the p and q labels for one of these parts (i.e., usingan identity of the form Gkpq = Gkpq/2 + Gkqp/2),the terms in brackets in Eq. (72) can be written as
1
2Ck
k+p+q=0
Mkpq(k +
p +
q)2
(MpqkCqCk + MqpkCpCk + MkpqCpCq). (73)
In thermal equilibrium, the spectrum Ck is given byequipartition among modes of a generalized energy-likeconserved quantity. Consider an equipartition spectrum
of the form Ck = 1/k, where k =
i (i)
(i)k , the
(i)k
are the coefficients in Eq. (37) (related to the quadraticinvariants), and (i) are determined by the initial con-ditions. Substituting Ck = 1/k, Cp = 1/p, andCq = 1/q into Eq. (73), and using Eqs. (36-37), onecan show that Eq. (73) indeed vanishes, so that Eq. (72)simplifies to Ck = k. The proof that Ck = 1/k is asolution of the steady-state Eq. (71) proceeds in a simi-lar way, interchanging the p and q labels for half of thesummation on the left-hand side of Eq. (71), and not-ing that Re k = 0 in an isolated thermal system, etc.Rigorously, this only shows that the equipartition spec-trum Ck = 1/k is an equilibrium solution. This paperdoesnt demonstrate that it is a stable equilibrium orthat mixing dynamics will necessarily relax to this state.For a discussion of the Gibbs-type H theorem that leadsto this result, see Appendix H of Ref. 35 and Refs. 36and 37. It is significant to note that the thermal equilib-rium result holds even if the number of modes is small,and it does not assume that the noise spectrum is white.
This is unlike a simple Langevin equation of the formof Eq. (2) (which has a local damping term in contrastto the time-history integral of Eq. (40)), where the two-time correlation function and the infinitesimal responsefunction are proportional only if the noise is white.
We next estimate the importance of the correctionterms in the decorrelation rate for an inertial range ofa turbulent steady state, such as in two-dimensional hy-
drodynamics. Typically most of the energy is at longwavelengths (Cq is peaked at sufficiently low q), so thatthe dominant contributions to the sums in Eq. (72) comefrom long wavelengths: |q| |k| in the first sum,and |q| |k| or |p| = |k + q| |k| in the secondsum. This means that one can approximate the de-nominators in the sums of Eq. (72) using, for example,(Ck + p+ Cq) (Ck + k) (since k and Ck are typ-ically increasing functions ofk). Similar approximationsgive (k k) (k k)2k/(Ck + k). Using thesteady-state relation Fk = Re kCk from Eq. (71) andthe disparate scale approximations to rewrite the secondsum in Eq. (72) in terms of k, and allowing finite dissi-pation but ignoring wave dynamics (so that
kand the
various coefficients are real), one can show that Eq. (72)simplifies in this disparate scale limit to
Ck.
= k k 2k(k k)(k Ck)(Ck + k)2
. (74)
This gives a cubic equation for Ck. For k = 0 the rootsare Ck = k and Ck = (1
2)k. Our speculation
is that Ck = k will be the usual case in a steady-state inertial range. (This appears reasonable, but itmight require numerical simulations to test it more defini-tively.) The other roots are probably unstable equilibria,so that any perturbation away from it would eventually
approach the stable root, or may only be relevant in tran-sient inverse-cascade cases where Re k < 0 (Re Ck 0being required to satisfy realizability).
Thus the two correction terms in Eq. (72) again exactlycancel each other (assuming the root choice made above),leading to Ck = k and the result that non-white-noisecorrections are asymptotically unimportant in a wide in-ertial range (k large compared to the long-wavelengthenergy-containing wave number scale k0). However, thismay be an artifact of the problem that the underlyingDIA, on which the MRMC is based, does not satisfy ran-dom Galilean invariance. As is well known38,39,8,9,40,the reason the DIA predicts a slightly different spec-
trum (E(k) k3/2
in the energy cascade inertial range)than the Kolmogorov result (E(k) k5/3) is becauseof this lost random Galilean invariance. [The stan-dard definitions for two-dimensional hydrodynamics useE(k) k3C|k| when k represents the stream function,so that the total energy is
dk E(k), a one-dimensional
integral over the magnitude of k.] The magnitude ofthis discrepancy between the DIA and dimensionally self-similar predictions is calculated for a general equation ofthe form Eq. (35) in Appendix C.
16
7/31/2019 Hammett-Bowman Generalized EDQNM
17/23
The underlying reason for this failure of the DIA isthat the nonlinear damping and noise terms (the left- andright-hand sides of Eq. (71)) are dominated by contribu-tions from the energy at long wavelengths. A random-Galilean invariant theory should depend only on theshear of longer wavelength modes (as k does in Orszagsphenomenological EQDNM) and the most energeticallysignificant interactions should occur among comparable
scales (|q| |p| |k|). Then the disparate scale ap-proximations that led to Eq. (74) would no longer bevalid. In such a case, it would seem unlikely that the twoterms in Eq. (72) would still exactly cancel, and therewould probably be some difference between the decorre-lation rate Ck and the decay rate k. It would thereforebe interesting to try to apply the techniques developedhere (for allowing multiple rates) to other starting equa-tions that respect random Galilean invariance, such asthe Lagrangian-history DIA, test-field model, or renor-malization group methods.
A regime where the correction terms might not can-cel each other, and the differences between Ck and kmight be significant, even with the DIAs overemphasisof long-wavelength contributions to the eddy turnoverrate, is in ITG/drift-wave plasma turbulence, where thespectrum can often be anisotropic and have strong waveeffects. That is, k can be complex, with unstable modesin some directions and damped modes in others, so thatk and Ck vary strongly with the direction ofk. Someplasma cases have a reduced range of relevant nonlin-early interacting scales, and the simplifications of dis-parate scales in an inertial range used to derive Eq. ( 74)are not appropriate. The corrections might also be im-portant in non-steady-state transient cases (such as zonalflows with predatorprey dynamics) or in other regimeswhere interactions between comparable scales dominate.
Evaluating the difference between the decorrelation rateCk and the decay rate k in more general cases such asthese probably requires a numerical treatment.
Finally, it is useful to demonstrate that the Multiple-Rate Markovian Closure approximation preserves realiz-ability, which turns out to require one additional con-straint. The MRMC equations (55) have the underlyingLangevin equation
kt
+ k(t)k(t) = fk(t), (75)
where k is given by Eq. (55b). The statisticsthat fk must satisfy can be found by comparing
the solution for such a Langevin equation, givenby Eq. (9), with Eqs. (55), finding the constraint
Ret0
dt R(t, t)Cf(t, t) = Fk, where Fk is given by
Eq. (55c) and R(t, t) = exp( tt
dt k(t)) is the prop-
agator for Eq. (75). Using an integral form for kpq(similar to Eq. (42d)),
kpq(t) =
t0
dt Rmod,k(t, t)Cmod,p(t, t) Cmod,q(t, t)
C1/2p (t)C
1/2q (t)
,
we find that if the two-time statistics of fk satisfy
Cf(t, t) = exp
tt
dt (k(t) k(t))
12
k+p+q=0
|Mkpq|2Cmod,p(t, t)Cmod,q(t, t)
(for t > t), then the MRMC is the statistical solutionof Eq. (75). As shown in Theorem 1 of Appendix Bof BKO1 (and as can be inferred from considering thestatistics of f(t) = g(t)h(t), where g and h are sta-tistically independent), a product of realizable correla-tion functions is also a realizable correlation function.Cmod,p(t, t
) and Cmod,q(t, t) are individually realizable
because Re Ck > 0 for all k. So in order to guaranteerealizability ofCf(t, t), we need to impose the additionalcondition that Re k Re k. This constraint seemsphysically reasonable. The parameter k measures thedecay rate for the ensemble averaged response k(t),which can decay either as energy is nonlinear transferredout of mode k or as the energy that is in k becomes
randomly phased. The quantity k used in Eq. (55) mea-sures only the rate at which net energy (regardless ofphase) is transferred out of mode k into other modes,so it would seem reasonable that k k will naturallyresult.
VIII. CONCLUSIONS
In summary, we have demonstrated a method for ex-tending Markovian approximations of the DIA, to allowthe decorrelation rate for fluctuations to differ from thedecay rate for the infinitesimal response function (the
renormalized Greens function or nonlinear propagator).This can give a more accurate treatment of various ef-fects such as non-white-noise forcing terms. In practice,the corrections to the decorrelation rate are modest, atleast in isotropic non-wave cases, since the decorrelationrate of the noise is usually comparable to, if not muchlarger than, the decay rate for the response function.For example, if f = in the simple Langevin exampleof Eq. (22), then the decorrelation rate is 60% lowerthan its white-noise value. Furthermore, the Multiple-Rate Markovian Closure Eq. (72) for the full DIA con-tains an offsetting term that can increase Ck, so the netresult is less clear. This is because the DIA is related
to a generalized Langevin equation Eq. (40), where non-white fluctuations modify not only the noise term (whichtends to reduce the decorrelation rate) but also modifythe renormalized propagator in the time-history integral(which tends to increase the decorrelation rate).
We have demonstrated that these two terms in fact ex-actly cancel each other as they should in thermal equilib-rium where the fluctuationdissipation theorem applies.We have also found another case, that of a wide inertialrange with no waves, where it is possible for these two
17
7/31/2019 Hammett-Bowman Generalized EDQNM
18/23
corrections to offset each other exactly, so that the decor-relation rate and the decay rates become equal. How-ever, this may be an artifact of the loss of Galilean in-variance in the Eulerian DIA, where modes in the iner-tial range nonlinearly interact predominantly with longwavelength modes. Thus it would be interesting to tryto apply the techniques developed in this paper to otherrenormalized statistical theories, in which the dominant
nonlinear interactions in an inertial range are betweencomparable scales instead of disparate scales and whichproperly reproduce Kolmogorovs E(k) k5/3 inertial-range energy spectrum instead of the Eulerian DIAsE(k) k3/2. Single-rate Markovian approximationshave been applied in the past to other renormalized sta-tistical theories10 and white-noise assumptions have alsobeen employed in renormalization group calculations ofturbulence.10 An interesting question is whether there issome way to generalize such calculations to allow for mul-tiple rates and non-white noise as considered here. An-other question is whether multiple-rate extensions mightmodify subgrid turbulence models. [Such correctionswould probably be important only at short scales nearthe transition from resolved to unresolved scales.]
Even in the context of an Eulerian DIA-based theory,there may be some regimes where the multiple-rate cor-rections in this paper may be important and warrantfurther investigation. These might include cases wherenon-steady-state dynamics are important (i.e., predatorprey oscillations between different parts of the spectrum,such as between drift waves and zonal flows), or whereinteractions between comparable |k| scales are more im-portant, such as might occur in anisotropic plasma tur-bulence with wave dynamics and with instability growthrates or Landau damping rates that vary strongly withthe magnitude and direction of the wavenumber. One
could test whether these corrections are important ornegligible in various regimes by looking at 3-mode cou-pling cases,1,2 or by numerically comparing with the DIAor direct numerical simulations.
The complete set of equations that constitutes theMultiple-Rate Markovian Closure (MRMC) are summa-rized in the final paragraph of Sec. (VI). The MRMC ex-tends the Realizable Markovian Closure (RMC) of BKO1
to allow various nonlinear rates and interaction times todiffer. The single decay/decorrelation rate of the RMC isreplaced with 3 different rates, k (the response functiondecay rate), Ck (the decorrelation rate for the two-timecorrelation function), and k (the energy damping rate).
The triad interaction time of the RMC is replaced with 4different triad interaction times with various weightingsof decorrelation and decay rates. While this increases thecomplexity of the equations somewhat, the main compu-tational advantages of a local-in-time Markovian closurerelative to the non-local-in-time DIA are retained.
ACKNOWLEDGMENTS
We thank Prof. John A. Krommes for many helpfuldiscussions sharing his insights into the DIA and Marko-vian approximations. In particular, we thank him forpointing out how to get the symmetric form of Eq. (19),which helps preserve important invariance properties.This work was supported by U.S. Department of Energy
Contract No. DEAC0276CHO3073 and by the NaturalSciences and Engineering Research Council of Canada.
APPENDIX A: REALIZABILITY OF A
PARTICULAR TWO-POINT CORRELATION
FUNCTION
In theorem 2 of their Appendix B, Bowman, Krommes,and Ottaviani1 show one way to prove that a two-pointcorrelation function of the form of Eq. (27) is realiz-able (if Re C(t) > 0 is satisfied almost everywhere).Realizability means that this two-point correlation func-
tion is the exact solution to some underlying stochasticproblem, such as a Langevin equation. In the absence ofrealizability, non-physical difficulties can sometimes de-velop, such as the predicted energy C(t) = C(t, t) goingnegative or diverging. Here we present an alternate proofthat Eq. (27) is realizable.
Consider the standard Langevin equation with time-dependent coefficients, but in the white-noise limitf(t)f(t) = 2D(t)(t t). Then Eq. (9) simplifiesto
C(t)
t+ 2Re (t)C(t) = 2D(t), (A1)
while the equation for the two-time correlation function,Eq. (8), becomes just C(t, t)/t + (t)C(t, t) = 0 fort > t, with the boundary condition C(t, t) = C(t).Taking the time derivative of Eq. (27) gives
t+ C(t)
Cmod(t, t
) =1
2C(t)
C(t)
tCmod(t, t
).
(A2)
If C(t, t) = Cmod(t, t), then these last two equationsgive = C (C(t)/t)/(2C(t)). Using Eq. (A1),this becomes C(t) = (t) Re (t) + D(t)/C(t). Itis interesting to note that this ensures Re C 0 evenif Re < 0. These equations can be rearranged togive Im (t) = I m C(t), D(t) = C(t) Re C(t), andRe (t) = Re C(t) (log C(t)/t)/2. Thus, given any3 arbitrary functions C(t) 0, Re C(t), and Im C(t)that determine the model Eq. (27), it is possible to finda white-noise Langevin equation for which it is the exactsolution (as long as Re C 0 so that D 0). Con-versely, for any arbitrary complex (t) and real D(t) 0that specify a white-noise Langevin problem, one can finda corresponding solution of the form Eq. (27).
18
7/31/2019 Hammett-Bowman Generalized EDQNM
19/23
It is interesting to note that C(t, t) =
C(t) exp[ tt
dt (t)] (for t > t) is also an exact so-lution for this same white-noise Langevin problem. Thisform is valid for arbitrary (t) (even Re < 0). How-ever, BKO1 and references therein41 indicate that thisfails to preserve realizability when used in the context ofMarkovian approximations to the DIA, so they insteaduse Eq. (27).
On a related topic, BKO1 showed that their re-alizable Markovian closure (RMC), as given by theirEqs. (66a-e), has an underlying Langevin representationgiven by their Eq. (67) with a two-time noise correla-tion function fk(t)fk (t) of the form of their Eq. (64),which is not necessarily white noise. However, othertwo-time noise correlation functions can also give thesame equal-time statistics equivalent to their Eq. (66a).
This requires Fk(t) = Ret0 dt fk(t)fk (t)Rk(t, t), where
Fk(t) is the noise term in their Eq. (66a). For acase where Fk(t) is always positive, then the RMC isalso equivalent to a Langevin representation with white-noise, fk(t)fk (t) = 2Df(t)(t t), where Df(t)= 12 Re
k+p+q=0 |Mkpq|2kpqC1/2p C1/2q . While both
white and non-white noise can give the same equal-timeequations for C(t), they will give different results for thetwo-time correlation function C(t, t). However, therecan be cases where Fk(t) < 0, for which a realizableLangevin representation must use non-white noise, as intheir Eq. (64). [Note that while C(t) 0 is a funda-mental requirement preserved by a realizable theory, thetriad interaction time Re kpq may go negative. Anexample, similar to Eq. (47) of BKO,1 can be constructedfor the realizable kpq of Eq. (66d) of BKO in the limitof constant Cp and Cq with k = p + q = + ia.]
APPENDIX B: FITTING MODELS TO THE
TWO-TIME CORRELATION FUNCTION
Conceptually the process of fitting an exponentialmodel of decorrelation to the actual two-time correla-tion function seems straightforward. But as describedin Sec. (IIIA) and Sec. (V), there are various choicesone could make in the weights used to fit the models.Galilean invariance imposes some constraints, but doesnot completely constrain the problem. In this appendixwe further describe some options and our choices.
Consider the following measure of the error betweenthe actual two-time correlation function and a model cor-relation function:
S(t) =
t0
dt |C(t, t) Cmod(t, t)|2. (B1)
We will assume Cmod(t, t) is of the form of Eq. (27). The
equal time correlation function C(t) = C(t, t) is alreadyspecified, so our task is to choose C(t) in Eq. (27) in sucha way as to minimize the squared error S. We want tostay in a Markovian framework, where C(t) depends on
parameters only from the present time. We assume thatC(t
) for times t < t has already been chosen optimally.But we can choose C(t) at the present time so that theextrapolation of S(t) into the future is minimized. Thatis, we want to minimize S/t, which, after using Eq. (8)for C(t, t)/t and Eq. (27) to evaluate Cmod(t, t
)/t,is
St
= 2t0
dt(t)C(t, t) + t
0dt R(t, t)Cf(t, t)
12C(t)
C(t)
tCmod(t, t
) + C(t)Cmod(t, t)
(C(t, t) Cmod(t, t)) + c.c., (B2)
where c.c. indicates the complex conjugate of the pre-vious expression. Separately minimizing S/t with re-spect to the real part Cr and imaginary part Ci ofC(t)(i.e., set (S/t)/Cr = 0, and then (S/t)/Ci =0) leads to the requirement that
t0 dt
Cmod(t, t
)Cmod(t, t
) =t0 dt
Cmod(t, t
)C(t, t
).
(B3)
[Note that when evaluating derivatives of Eq. (B2) withre