Embed Size (px)
Citation preview

GSR approach to Horndeski inflation
Héctor RamírezIFIC - University of Valencia
COSMO - August ‘17
Based on a work in preparation with W. Hu, H. Motohashi and O. Mena.

S =5X
i=2
Zd4x
p�gLi
L2 = K (�, X)
L3 = �G3 (�, X)⇤�
L4 = G4 (�, X)R+G4X
h(⇤�)2 � (rµr⌫�)
2i
L5 =G5 (�, X)Gµ⌫rµr⌫�
� G5X
6
h(⇤�)3 � 3 (⇤�) (rµr⌫�)
2 + 2 (rµr⌫�)3i
X ⌘ �1
2@µ�@
µ�
“The most general scalar-tensor theory, in curved spacetime, which leads to second-order equations of motion”:

S
(2)⇣ =
Zd4x
a
3bs✏H
c
2s
✓⇣
2 � c
2sk
2
a
2⇣
2
◆
S
(2)� =
X
�=+,⇥
Zd4x
a
3bt
4c2t
✓�
2� � c
2tk
2
a
2�
2�
◆
Horndeski inflation
bs = bt = cs = ct = 1
In canonical inflation:
• Kobayashi et al.; 1105.5723 • Motohashi, Hu; 1704.01128

bs =c2s✏H
w1(4w1w3 + 9w2
2)
3w22
�
c2s =3(2w2
1w2H � w22w4 + 4w1w1w2 � 2w2
1w2)
w1(4w1w3 + 9w22)
bt = w1c2t c2t =
w4
w1
Scalar parameters:
Tensor parameters:
✏H = � H
H2
w1 = M2pl � 2
⇣3G4 + 2HG5�
⌘+ 2G5,�X ,
w2 = 2M2plH � 2G3�� 2
⇣30HG4 � 5G4,��+ 14H2G5�
⌘+ 28HG5,�X ,
w3 = �9M2plH
2 + 3⇣X + 12HG3�
⌘+ 6
⇣135H2G4 � 2G3,�X � 45HG4,��+ 56H3G5�
⌘� 504H2G5,�X ,
w4 = M2pl + 2
⇣G4 � 2G5�
⌘� 2G5,�X .

S
(2)⇣ =
Zd4x
a
3bs✏H
c
2s
✓⇣
2 � c
2sk
2
a
2⇣
2
◆
d2v
d⌧2+
✓c2sk
2 � 1
z
d2z
d⌧2
◆v = 0
v = z⇣
z = a
s2bs✏Hc2s
,
Mukhanov - Sasaki equation

S
(2)⇣ =
Zd4x
a
3bs✏H
c
2s
✓⇣
2 � c
2sk
2
a
2⇣
2
◆
d2v
d⌧2+
✓c2sk
2 � 1
z
d2z
d⌧2
◆v = 0
v = z⇣
z = a
s2bs✏Hc2s
Mukhanov - Sasaki equation
Either,
• Assume slow-roll approximation.
• Use GSR techniques.
• Solve numerically.

S
(2)⇣ =
Zd4x
a
3bs✏H
c
2s
✓⇣
2 � c
2sk
2
a
2⇣
2
◆
d2v
d⌧2+
✓c2sk
2 � 1
z
d2z
d⌧2
◆v = 0
v = z⇣
z = a
s2bs✏Hc2s
Mukhanov - Sasaki equation
Either,
• Assume slow-roll approximation.
• Use GSR techniques.
• Solve numerically.

Generalized slow-roll recipe:
• Stewart; 0110322 • Dvorkin, Hu; 0910.2237 • Hu; 1104.4500 • Hu; 1405.2020 • Motohashi, Hu; 1503.04810 • Motohashi, Hu; 1704.01128
… and others.

1. Write down Mukhanov-Sasaki equation.Generalized slow-roll recipe:

1. Write down Mukhanov-Sasaki equation.2. Isolate deviations from de Sitter background.
d2y
dx2+
✓1� 2
x
2
◆y =
f
00 � 3f 0
f
y
x
2
ss ⌘Z
csd⌧y ⌘p
2cskv x ⌘ kss
f =
r8⇡2
bs✏HcsH2
aHsscs
Generalized slow-roll recipe:

1. Write down Mukhanov-Sasaki equation.2. Isolate deviations from de Sitter background.
3. Apply Green function techniques (GSR).
ln �2(1) = G (ln x
m
) +
Z 1
xm
d(ln x)W (kx)G0 (ln x)
d2y
dx2+
✓1� 2
x
2
◆y =
f
00 � 3f 0
f
y
x
2
G = �2ln f +2
3(ln f)0
W (u) =3 sin(2u)
2u3� 3 cos(2u)
u2� 3 sin(2u)
2u
Generalized slow-roll recipe:

4. Taylor expand GSR formula and write down analytic equations (OSR).
1. Write down Mukhanov-Sasaki equation.2. Isolate deviations from de Sitter background.
3. Apply Green function techniques (GSR).
ln �2(1) = G (ln x
m
) +
Z 1
xm
d(ln x)W (kx)G0 (ln x)
d2y
dx2+
✓1� 2
x
2
◆y =
f
00 � 3f 0
f
y
x
2
Generalized slow-roll recipe:

Optimized SR for Horndeski (leading order):
ln�2⇣ ⇡ ln
✓H2
8⇡2bscs✏H
◆� 10
3✏H � 2
3�1 �
7
3�s1 �
1
3⇠s1
���x=x1
ns � 1 ⇡ �4✏H � 2�1 � �s1 � ⇠s1 �2
3�2 �
7
3�s2 �
1
3⇠s2
���x=x1
↵s ⇡ �2�2 � �s2 � ⇠s2 �2
3�3 �
7
3�s3 �
1
3⇠s3 � 8✏2H � 10✏H�1 + 2�21
���x=x1
ln�2� ⇡ ln
✓H2
2⇡2btct
◆� 8
3✏H � 7
3�t1 �
1
3⇠t1
���x=x1
nt ⇡ �2✏H � �t1 � ⇠t1 �7
3�t2 �
1
3⇠t2
���x=x1
↵t ⇡ ��t2 � ⇠t2 �7
3�t3 �
1
3⇠t3 � 4✏2H � 4✏H�1
���x=x1
Tensors
Scalars
ln �2 ' G (ln xf ) +1X
p=1
qp (ln xf )G(p) (ln xf )
G = �2ln f +2
3(ln f)0
f =
r8⇡2
bs✏HcsH2
aHsscs
• Motohashi, Hu; 1704.01128

Optimized SR for Horndeski (leading order):
r ⌘4�2
�
�2⇣
⇡ 16✏Hbscsbtct
⇡ �8bscsbtct
nt,
Deviations from the standard consistency relation in the observations could be checked in this context.

+ chaotic inflation = G-inflationG3
WMAP7
Ohashi, Tsujikawa; 1207.4879
L2 = X � V (�) =1
2�2 � 1
2m2�2
L3 = M�3X⇤�
L4 =1
2M2
plR *Using SR techniques*

0.930 0.945 0.960 0.975 0.990Primordial tilt (ns)
0.08
0.16
0.24
0.32
Tenso
r-to
-sca
lar
ratio
(r)
Planck TT + lowPPlanck TT,TE,EE + lowP
Galileon inflation
(c)(b)
(a)
WMAP7
+ chaotic inflation = G-inflationG3
Ohashi, Tsujikawa; 1207.4879
L2 = X � V (�) =1
2�2 � 1
2m2�2
L3 = M�3X⇤�
L4 =1
2M2
plR *Using SR techniques*

M = 3⇥ 10�4Mpl
M = 4.2⇥ 10�4Mpl
M = 1⇥ 10�3Mpl
a)
b)
c)
c2s > 0 M > 4.2⇥ 10�4MplFor ,
Ohashi, Tsujikawa; 1207.4879
L3 = M�3X⇤�

+tanh + chaotic inflationG3
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
HR, H. Motohashi, W. Hu, O. Mena; in preparation.

+tanh + chaotic inflationG3
M = 3⇥ 10�4Mpl
M = 4.2⇥ 10�4Mpl
M = 1⇥ 10�3Mpl
a)
b)
c)
(c)
(b)
(a)
�r = 5Mpl
75 76 77 78 79 800.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
c2 s
N
d = 3Mpl
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
HR, H. Motohashi, W. Hu, O. Mena; in preparation.

+tanh + chaotic inflationG3
d = Mpl
d = 2.1Mpl
d = 5Mpl
Condition: d �r
�r = 5Mpl
75 76 77 78 79 800.0
0.5
1.0
1.5
2.0
c2 s
N
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
HR, H. Motohashi, W. Hu, O. Mena; in preparation.

+tanh + chaotic inflationG3
�r = 5Mpl
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
5 10 50 100 5000
2
4
6
8
10
12
14
N
ϕ/Mpl
N
�/M
pl
d = 0.1Mpl
HR, H. Motohashi, W. Hu, O. Mena; in preparation.
m2�2
G3

+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
HR, H. Motohashi, W. Hu, O. Mena; in preparation.
1 5 10 50 100 5000.00
0.01
0.02
0.03
0.04
0.05
Chaotic inflation
G-model
Step model
N
✏ H
m2�2
G3
✏H = � H
H2✏H = � H
H2

1 5 10 50 100 5000.00
0.01
0.02
0.03
0.04
0.05
Chaotic inflation
G-model
Step model
+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
N
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
✏ HHR, H. Motohashi, W. Hu, O. Mena; in preparation.
m2�2
G3
r ' 16✏H
✏H = � H
H2✏H = � H
H2

+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
m2�2
10-12 10-7 0.01 1000.00
5
10
50
100
10 13 16 19 22 25 28 31 34 37 40 43 46 49 52
k [Mpc-1 ]
109Δ2
ξ(k)
N
10-12 10-7 0.01 1000.00
0.25
0.30
0.35
0.40
0.45
0.50
0.55
8 11 14 17 20 23 26 29 32 35 38 41 44 47 50 53
k [Mpc-1 ]
109Δ2t(k
)
N
k [Mpc�1] k [Mpc�1]
N N
109�
2 h(k)
109�
2 ⇣(k)
m2�2
G3
G3
*Using GSR techniques*
HR, H. Motohashi, W. Hu, O. Mena; in preparation.

+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
m2�2
10-12 10-7 0.01 1000.00
5
10
50
100
10 13 16 19 22 25 28 31 34 37 40 43 46 49 52
k [Mpc-1 ]
109Δ2
ξ(k)
N
10-12 10-7 0.01 1000.00
0.25
0.30
0.35
0.40
0.45
0.50
0.55
8 11 14 17 20 23 26 29 32 35 38 41 44 47 50 53
k [Mpc-1 ]
109Δ2t(k
)
N
k [Mpc�1] k [Mpc�1]
N N
109�
2 h(k)
109�
2 ⇣(k)
m2�2
G3
G3
*Using GSR techniques*
HR, H. Motohashi, W. Hu, O. Mena; in preparation.
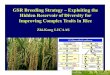
ns = 0.9556 r = 0.0155

0.930 0.945 0.960 0.975 0.990Primordial tilt (ns)
10�3
10�2
10�1
Tens
or-to
-sca
larr
atio
(r)
Planck TT + lowPPlanck TT,TE,EE + lowP
G3 - inflationG3+ step - inflation (N = 55)
Canonical m2�2
Msmaller
N = 60N = 50
M = 2⇥ 10�4Mpl � 8⇥ 10�3Mpl
*Using GSR techniques*

+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
HR, H. Motohashi, W. Hu, O. Mena; in preparation.
109�
2 ⇣(k)
N
k [Mpc�1]
N
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
109�
2 h(k)
GSRSR
OSRGSRSR
OSR10-12 10-7 0.01 1000.00
5
10
50
100
10 13 16 19 22 25 28 31 34 37 40 43 46 49 52
10-12 10-7 0.01 1000.00
0.26
0.28
0.30
0.32
0.348 11 14 17 20 23 26 29 32 35 38 41 44 47 50 53
k [Mpc�1]

+tanh + chaotic inflationG3
�r = 13.5Mpl
d = 0.1Mpl
HR, H. Motohashi, W. Hu, O. Mena; in preparation.
109�
2 ⇣(k)
N
k [Mpc�1]
N
L3 = M�3
1 + tanh
✓�� �r
d
◆�X⇤�
109�
2 h(k)
GSRSR
OSRGSRSR
OSR10-12 10-7 0.01 1000.00
5
10
50
100
10 13 16 19 22 25 28 31 34 37 40 43 46 49 52
10-12 10-7 0.01 1000.00
0.26
0.28
0.30
0.32
0.348 11 14 17 20 23 26 29 32 35 38 41 44 47 50 53
k [Mpc�1]
ns = 0.9456
ns = 0.9556
ns = 0.9551
r = 0.0154
r = 0.0160
r = 0.0155

Conclusions
Inflation in the Horndeski framework is viable and could cure some popular models.
Our model allows us to compute observables during a G-inflation period and to end inflation as canonical.
‣ Extra note: Generalized slow-roll and Optimized slow-roll techniques are efficient tools for computing the power spectra in noncanonical models.




![Parameterized post-Newtonian limit of Horndeski's gravity ...kodu.ut.ee/~manuel/talks/stg/2015_06_29_moscow.pdf · Horndeski gravity [G. W. Horndeski ’74]: Scalar-tensor theory](https://img.pdfslide.us/doc/110x75/5f72d3e004311b75e85a63b1/parameterized-post-newtonian-limit-of-horndeskis-gravity-koduuteemanueltalksstg20150629.jpg)