Embed Size (px)
Citation preview

HAL Id: hal-01694417https://hal.univ-reims.fr/hal-01694417
Submitted on 26 Feb 2018
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Grey-level hit-or-miss transforms-Part II: Application toangiographic image processing
Benoît Naegel, Nicolas Passat, Christian Ronse
To cite this version:Benoît Naegel, Nicolas Passat, Christian Ronse. Grey-level hit-or-miss transforms-Part II: Appli-cation to angiographic image processing. Pattern Recognition, Elsevier, 2007, 40 (2), pp.648-658.�10.1016/j.patcog.2006.06.011�. �hal-01694417�

Grey-level hit-or-miss transforms - Part II: Application toangiographic image processing
Benoıt Naegela,∗, Nicolas Passatb,c, Christian RonsebaEIG-HES (Ecole d’Ingenieurs de Geneve), 4 rue de la Prairie, CH-1202 Geneve, Switzerland
bLSIIT, UMR 7005 CNRS-ULP (Laboratoire des Sciences de l’Image, de l’Informatique et de la Teledetection), Bd S. Brant, BP 10413,F-67412 Illkirch Cedex, France
cInstitut Gaspard Monge, Laboratoire A2SI (Algorithmique et Architecture des Systemes Informatiques), Groupe ESIEE, Cite Descartes,BP 99, F-93162 Noisy-le-Grand Cedex, France
Abstract
The hit-or-miss transform(HMT) is a fundamental operation on binary images, widely used since forty years. As it is notincreasing, its extension to grey-level images is not straightforward, and very few authors have considered it. Moreover,despite its potential usefulness, very few applications ofthe grey-level HMT have been proposed until now. Part I of thispaper [1] was devoted to the description of a theory enablingto a unify the main definitions of the grey-level HMT, mainlyproposed by Ronse and Soille, respectively. Part II of this paper, developed hereafter, deals with the applicative potentialof the grey-level HMT, illustrated by its use for vessel segmentation from 3D angiographic data. Different HMT-basedsegmentation methods are then described and analysed, leading to concrete analysis techniques for brain and liver vessels,but also providing algorithmic strategies which could further be used for many other kinds of image processing applications.
Key words: Mathematical morphology, hit-or-miss transform, grey-level interval operator, angiographic image processing.
1. Introduction: 3D angiographic imaging
The development of medical imaging techniquesduring the last twenty years, has led to the creationof three-dimensional (3D) data acquisition processes.The most important ones are magnetic resonanceimaging (MRI) and computed tomography (CT),which are respectively based on nuclear magnetic res-onance properties of the atoms and on their behaviourwhen exposed to X-rays.
∗ Corresponding author: Benoıt Naegel.Email: [email protected], tel: (+41) (0)22 338 05 66.
Since visualisation of vessels or flowing blood(for surgery planning, vascular pathology detectionor functional analysis) constitutes an important issuein medical imaging, both CT and MRI have beenadapted to enable a correct discrimination of vascularstructures. These specific techniques, called computedtomography angiography (CTA) [2] and magnetic res-onance angiography (MRA) [3] generally provide 3Ddata of vessels (i.e., of blood) with a millimetric orsubmillimetric resolution. It has to be noticed that CT-scans of hepatic structures, which require an injectionof a contrast material in order to discriminate healthyfrom non healthy parts of the liver, also provide infor-mation on the vascular network. Examples of slices
Preprint submitted to Pattern Recognition 12 April 2006

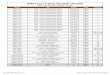
Fig. 1. Slices of three-dimensional angiographic data. Left: sagittal slice (medial plane) of a MRA of the brain, visualising arterial andvenous flowing blood. Right: axial slice of a CT-scan of the abdomen, visualising hepatic structures and branches of the portal network(on the left part of the slice).
of MRA and liver CT-scans are illustrated in Fig. 1.Angiographic images are generally characterized by
a high signal of the flowing blood (obtained by inject-ing a contrast agent: gadolinium in contrast-enhancedMRA [4] or iodinated contrast material in CT-scan,or by only using the physical properties linked to theblood flow in phase-contrast [5] and time-of-flight [6]MRA) by comparison to other tissues, whose signal isgenerally lower or removed.
This signal contrast between blood and other tis-sues, coupled with geometric and topological proper-ties of blood vessels (which are elongated structuresgenerally organized in tree-like networks) theoreti-cally enable to easily analyse 3D angiographic data.However, such data are generally huge, being com-posed of hundreds of slices, and often present a lowSNR. A straightforward consequence of these prop-erties is to make three-dimensional angiographic dataanalysis a long and error prone task for radiologists.
2. Use of grey-level HMT for vessel segmentation
Although classical two-dimensional visualisationtechniques such as maximum intensity projection(MIP) [7] are often used for the analysis of 3D an-giographies, the development of vessel segmentationstrategies enabling to generate a volumic object cor-responding to the vascular network represented in aCTA or a MRA, has been an active research field
for the last fifteen years. Several papers have ad-dressed the problem of 3D vessel segmentation, someof them being cited and discussed in the followingoverviews [8–11]. Most of the proposed methodsrely on assumptions concerning the high intensity ofblood signal and the tubular shape of vessels. Theseassumptions have been used to design algorithmsbased on many image processing concepts includingdeformable models, vessel-tracking or mathematicalmorphology. However, the use of grey-level HMThad never been considered before our work proposedin [12–15] (more generally, grey-level HMT had notbeen much considered for image processing applica-tions, before this work, except by Soille in [16], andby Barat et al. who used morphological probing fora few industrial applications [17,18], or illustrated itsbehaviour when applied on 2D medical data [19]).
Despite its low involvement in 3D vessel segmenta-tion, the grey-level HMT presents properties justifyinga more intensive use. Indeed, its definition in termsof foreground and background structuring elements(SE) is appropriate to the invariant vessel propertiesin terms of shape and intensity with respect to the re-maining tissues. For vessel segmentation purpose, theHMT can be used in different ways. It can be involvedin classical filtering strategies consisting in applyingwell-chosen structuring elements on the whole image,in order to detect the vessels. It can also be used as apart of heuristic criteria providing information on the“vesselness” of voxels or sets of voxels of the pro-
2

cessed image, such kinds of criteria being adapted tobe incorporated in vessel-tracking or region-growingsegmentation strategies.
The use of grey-level HMT for vessel segmentationfrom 3D angiographic data however requires to cor-rectly choose parameters such as shape or intensity,and to deal with the possibly high algorithmic com-plexity inherent to its use on huge data. The followingsection proposes a synthetic description of three meth-ods, previously proposed in [12–15], and of some re-sults they provide, illustrating the way the grey-levelHMT can be used for vessel segmentation, and hope-fully justifying its usefulness for many other kinds ofmedical and non-medical applications.
3. A few grey-level HMT-based methods
Vessel segmentation is often applied on angio-graphic data visualising cerebral or hepatic structures.In such cases, the segmented vessels can be used forplanning surgical procedures on the brain or the liver,or to detect and quantify vascular pathologies. Thethree vessel segmentation methods relying on grey-level HMT discussed in this section, are devoted tosuch hepatic and cerebral applications. Two versionsof the first method [12,13] are designed to automati-cally recognize a precise part of the hepatic venoustree from CT-scans: the entrance of the portal vein(EPV) of the liver. The second method [13] proposesa segmentation of this whole hepatic venous tree fromsimilar data. The third one [14,15] enables to segmentboth venous and arterial structures from MRA of thebrain.
In the sequel, the considered 3D angiographic im-ages, denoted byF, will be considered as functionsE → T with E = [0, dimX− 1] × [0, dimY− 1] ×[0, dimZ− 1] ⊂ Z3 (wheredimX, dimY, anddimZ arethe dimensions of the image) andT = [a, b] ⊂ Z, thendealing with the discrete nature of medical imagingdata. The structuring functions involved in grey-levelHMT, denoted byV,W will then be functionsE→ Z.All notations used hereafter follow those of Part I ofthis paper [1]. The grey-level HMT operators are alsothe ones defined in Section 3 of [1].
3.1. Choice of structuring functions
The first issue, when using grey-level HMT forsegmentation, is to correctly determine the structur-ing functions enabling to obtain correct results. Moreespecially, the choice of the “shape” of these func-tions, which means the support supp(V) of the fore-ground functionV and the dual support supp∗(W) ofthe background functionW, is fundamental. The ge-ometric properties of vessels, which can be modelledas elongated structures presenting a globally circularcross-section, can be used to guide this determination.Since the chosen shapes can present degrees of free-dom in terms of size and of orientation, two strategiescan then be considered.
The first one consists in determining a fixed shapefor the structuring functions. It is applicable when thesearched structures present few variations between dif-ferent patients. However it can sometimes be usefulto cope with these variations when using fixed shapestructuring functions. To match noisy objects or struc-tures with slightly different shapes the usual methodthen consists in relaxing the constraints imposed bythe structuring functions. Several strategies have beenproposed in the literature:– The erosion of both structuring function supports
(increasing the “don’t care space” [20]). The maindrawback of this method is the possible alterationof the boundaries of structuring function supports:important characteristics of the searched shape maythen be removed.
– Using the HMT with rank-order operators [16,21–23], which is an efficient way to detect shapesslightly altered by noise or imperfections.
– The subsampling or decimation of the structur-ing function supports in a regular manner, usingBloomberg’s method [21,24].
It has been experimentally observed that the decima-tion method provides similar results as those obtainedfrom HMT with rank-order operators, with the advan-tage that decimation reduces the computational com-plexity.
Using a fixed shape for the structuring functions isthe strategy considered in [12,13] where the structur-ing function supports are chosen according to a pri-ori anatomical knowledge. Indeed, the purpose is tosegment a particular structure: the EPV of the liver,
3

Fig. 2. Mean shape of the EPV, computed from a 18 case trainingbase. Left: sagittal view. Middle: coronal view. Right: axial view.
which presents few anatomical variations. To auto-matically detect the EPV from CT-scans of the liver,two different versions of the methods are used. In[12], the shapes of the structuring functions are cho-sen according to the mean shape of the EPV calcu-lated on a training base of images (see Fig. 2). Theshapes deduced from this mean representation model(illustrated in Fig. 3) are the following: supp(V) is acylinder parallel to the coronal plane and presentingan angle ofπ/4 with the axial plane, while supp∗(W)is a hollow cylinder with the same axis as supp(V)and with higher radius. A grey-level HMT (based onSoille’s integral interval operatorIKV,W) is then usedwith these structuring functions, enabling to highlightall the candidates structures. A next step consists ineliminating the false-positives based on some heuris-tics on the localisation and the size of EPV. In [13],another version of such a strategy is used. A first stepdetects the superior mesenteric vein (SMV) which isa structure connected to the EPV, while a second stepdetects the EPV itself. The shape of the SMV is al-ways similar to an elongated vertical structure, justi-fying the choice of a vertical cylinder for supp(V), andof a hollow cylinder with the same axis for supp∗(W).For detecting the EPV, a horizontal cylinder is cho-sen for supp(V), while a set of three hollow cylindersof same axis but with different sizes is considered forsupp∗(W). This enables to deal with the variability ofthe EPV in terms of size (it has to be noticed that theEPV presents few variations between patients in termsof orientation). These structuring functions are illus-trated in Fig. 4. Once both grey-level HMTs have beenperformed, the intersection between the two resultingimages permits keeping only the points belonging tothe EPV and SMV, and hence eliminating false pos-itives. A morphological reconstruction starting fromthese points can then be performed to reconstruct theconnected component corresponding to the EPV.
The second strategy for determining the structuring
Fig. 3. Shape of the structuring functions used in [12]. Left: fore-ground element (supp(V)). Right: background element (supp∗(W)).
functions consists in considering a large set of ele-ments, each one differing in terms of size and orien-tation. This approach is the one proposed in [14,15],where it is assumed that any size and any orienta-tion can lead to the creation of structuring functionswhich may be used during the HMT segmentation.Here supp(V) is chosen as being a discrete sphere. Theuse of the discrete version of an isotropic shape is jus-tified by the presence of tortuous arterial vessels whichcould hardly be detected by elongated structures suchas ellipsoids. The background shape supp∗(W) is a setof points regularly sampled on a discrete circle withthe same centre as supp(V). The use of a subset of adiscrete circle instead of a whole one enables to obtainmore robust results at positions such as bifurcations,where the vessels present a non circular cross section.These discrete shapes and their theoretical continuousversions are illustrated in Fig. 5. They present differentproperties linked to two degrees of freedom in termsof size (one for supp(V) and one for supp∗(W)) andtwo degrees of freedom in terms of orientation (forsupp∗(W)). Then, this second strategy leads no longerto a unique element, but to a large family of structuringfunctions varying according to the different parame-ters. A subset of this family of elements is illustratedin Fig. 6.
The last parameter which has to be determined is theintensity of the structuring functions, i.e. the respective
4

Fig. 4. Shape of the structuring functions used in [13]. First row: structuring functions used for detecting the SMV. Left: foreground element(supp(V)). Right: background element (supp∗(W)). The central point represents the origin and does not belong to supp∗(W). Second row:structuring functions used for detecting the EPV. From leftto right: foreground element (supp(V)), background elements (supp∗(W)). Thecentral point represents the origin and does not belong to supp∗(W).
Fig. 5. Shape of the structuring functions used in [14,15]. Left:theoretical continuous shapes. Right: real discrete ones.The fore-ground elements (supp(V)) are represented in dark grey, while thebackground ones (supp∗(W)) are represented in white.
values ofV andW on supp(V) and supp∗(W). In [12–15], V andW are assumed to present each a constantvalue on supp(V) and supp∗(W). These two valuesare chosen in such a way that the smallest positivedifference between image values on supp(V) and onsupp∗(W) leads to a positive response. Thus we take– V = Csupp(V),0, that isV(x) = 0 for all x ∈ supp(V),
and– W = C∗supp∗(W),−1, that is W(y) = −1 for all y ∈
supp∗(W), with the fittingHV,W, or equivalently ([1])– W = C∗supp∗(W),0, that is W(y) = 0 for all y ∈
supp∗(W), with the fittingKV,W.This enables the methods to rely more strongly on
Fig. 6. Subset of the possible structuring function supports usedin [14,15]. The foreground elements (supp(V)) are represented indark grey, while the background ones (supp∗(W)) are representedin white. They present specific properties in terms of size (supp(V),supp∗(W)) and of orientation (supp∗(W)).
shape properties of the searched vessels than on thepossibly low or inhomogeneous signal of the flowingblood, caused by noise or artifacts.
Note that in the particular case of the integral val-
5

uation, it is sometimes possible to derive the intervaloperator from the corresponding one with flat struc-turing functions. Consider two structuring elementsA, B ∈ P(E), the structuring functionsV = CA,a andW = C∗B,b (for a, b ∈ T′), and the associated flat struc-turing functionsV′ = CA,0 and W′ = C∗B,0. Then forany functionF ∈ TE and p ∈ E, we have
IHV′,W′ (F)(p) = max[
(F ⊖ A)(p) − (F ⊕ B)(p), 0]
and
IHV,W(F)(p) =
max[
(F ⊖ A)(p) − (F ⊕ B)(p) − a+ b, 0]
.
If a ≥ b we get:– IHV,W(F)(p) = max
[
IHV′,W′ (F)(p) − a + b, 0]
, andsimilarly
– IKV,W(F)(p) = max[
IKV′ ,W′ (F)(p) − a+ b, 0]
.In other words, whena ≥ b, from the integral valu-ation associated to the fitting obtained with two flatstructuring functionsV′ andW′, we can derive the in-tegral valuation associated to the fitting obtained withnon-flat structuring functionsV = CA,a andW = C∗B,b.
If a < b this relation does not hold anymore, andwe can only say that
IHV′,W′ (F)(p) > 0 =⇒
IHV,W(F)(p) = IHV′ ,W′ (F)(p) − a+ b ,
and similarly forIKV,W(F)(p). Indeed, the integral val-uation “loses” all negative differences (F ⊖ A)(p) −(F ⊕ B)(p), whose valuation is set to 0.
From an algorithmic point of view, in order to com-pute multiple grey-level hit-or-miss transforms (withintegral valuation) with structuring functionsV = CA,a
andW = C∗B,b for increasingt = a−b ≥ 0, (a, b ∈ Z), itis sufficient to compute only one HMT withV = CA,0
andW = C∗B,0. Other HMTs are obtained by subtract-ing t to each point. Note thatt = a − b < 0 is not aproblem in practice: one can for example define an-other integral valuation taking all possible (i.e. posi-tive and negative) values.
3.2. A few remarks about the flat/non-flat structuringfunctions
The vessel segmentation methods described in thispaper only use structuring functions with constant
grey-levels, flat or not (those structuring functionsbeing cylindersCA,t). Theoretically, it is howeverpossible to design non-flat structuring elements withnon-constant grey-levels. Such structuring functionsare more constrained, enabling to segment precisestructures according to their shape but also to preciselocal intensity properties. In the case of angiographicdata analysis, a few situations could justify the devel-opment of strategies using non-flat structuring func-tion with non-constant grey-levels. Such situationsare related to vascular (or more generally anatomical)objects presenting characteristic textures.
A first case is linked to the well known partialvolume effect, leading to smooth transitions betweenstructures, in the regions where voxels contain severaldifferent tissues. A HMT using grey-level structuringelements to detect this type of transitions (relying ona family of structuring functions whose slope is thesame as the transition between tissues) could be con-sidered in this kind of situation. However in such acase, a flat structuring element with an integral valu-ation could also be used to detect the local variationsof the function.
A second case is linked to a precise category ofMRA, called Phase-Contrast MRA, which detects theflowing blood movement, and more especially thephase shift of moving spins in the blood. The spinmovement being cyclic, signal artifacts can appear inthe resulting angiographic data. They generally corre-spond to a signal decrease at the center of the vessels,where the blood signal should reach its maximalvalue. These aliasing artifacts lead to a blood signallocally similar to a high intensity ring surrounding alower intensity area (which can sometimes be evenlower than the background signal). A HMT usinggrey-level structuring elements could then enable thedetection of blood signal, by considering a structuringfunction correctly fitting this kind of partial signal.However, the definition of such functions would firstrequire to model the physical phenomena leading tothese artifacts, and to consider several acquisitionparameters which are not necessarily available. More-over, even in this case, the use of a flat structuringfunction with well-chosen shapes (for example twohollow cylinders of same axis, modeling the vesseland the background) could probably also deal withthis kind of artifacts.
Finally, in practical cases (where the purpose is
6

generally to characterize structures from their shapeby imposing a constraint on the difference of con-trast between the object and a particular neighbor-hood), flat structuring elements are generally suffi-cient. The determination of situations where the use ofnon-flat structuring elements could be justified is notan easy task. This is a general question in mathemat-ical morphology, as erosions and dilations using non-flat and non-constant structuring functions have seenlittle practical use for now. This is the case when onewants to impose not only constraints on the contrastbetween an object and its neighborhood, but also aparticular ordering of the grey-levels inside the shapeor its neighborhood. However the main difficulty re-mains the choice of grey-levels in order to deal withthe variability of real image objects. In such situations,indeed, one has to face with “horizontal” variability(variation of “shape”) along with “vertical” variabil-ity (variation of scene illumination, scaling of intensi-ties), thus incresing the number of parameters of theproblem.
3.3. Algorithmic process
As previously stated, the grey-level HMT can essen-tially be used in two main ways: in a classical filteringprocess, or as part of heuristic criteria for guidance ofiterative segmentation processes.
3.3.1. Filtering segmentationFiltering segmentation consists in applying afitting
which associates toF a set of points (p, t) ∈ E×T′ forwhich V(p,t) andW(p,t) have some relation toF. Suchan exhaustive strategy implies that all the consideredpairs of structuring functions (V,W) have to be testedon each point of the processed imageF. This leads tocomplexities:– O1 = O(card(E)) = O(dimX.dimY.dimZ), for the
number of points where HMTs are applied;– O2 = O(card({V,W})), for the number of applied
HMTs on each point (where card({V,W}) stands forthe number of applicable pairs of elementsV andW);
– O3 = O(card(V).card(W)), for the application ofone HMT on one point ofF.
The global complexity of a filtering vessel segmen-tation O = O1.O2.O3 can then become prohibitive if
an exhaustive approach is considered. (Note howeverthat the complexityO1.O3 of a single HMT can be re-duced when the structuring elementsV andW satisfysome conditions, see [25,26] and [16, p. 81].)
In [12], the processed images are subsampled to re-duce the complexityO1. Moreover, since a fixed num-ber of structuring functions are considered, theO2
complexity is equal toO(1). Finally,O3 is also reducedby simplifying the structuring function supports ac-cording to Bloomberg’s method [24] which consists inremoving points in a regular manner (see Fig. 7). Notethat in this case the primary goal of this simplification(or decimation) is not the reduction of the complex-ity, but rather the relaxing of the constraints imposedby the structuring functions (see Subsection 3.1). Herethe complexity reduction then appears as an “interest-ing” side effect of decimation.
Thefittingstep in [12,13] isKV,W (following Soille’sapproach), while thevaluationis the binary mask oneM. The resultMKV,W is then intersected with the origi-nal image to keep the original grey-levels, finally lead-ing to the following filtering segmentation formula:
F ∧ MKV,W(F) :
p 7→
F(p) if ∃t ∈ T′, V(p,t) ≤ F ≪W(p,t) ,
−∞ otherwise .
Fig. 7. Structuring function support subsampled on a regular grid.Left: sagittal plane. Right: axial plane.
In [14,15], the number of pairs of structuringfunctions used for HMT (i.e. theO1.O2 complex-ity) is O(dimX.dimY.dimZ.RV.RW.θW.φW), whereRV,RW, θW, φW are the radii of supp(V) and supp∗(W)and the orientations of supp∗(W) in a spherical frame(i.e. the degrees of freedom of parameters of thestructuring function supports), respectively. Since thiscomplexity forbids to obtain results without expen-sive computation time, the proposed way to reduce
7

O1.O2 consists in using an atlas, which is a functionA defined onE and indicating for each pointp ∈ Eif a grey-level HMT has to be applied onp or not,and what are the subsets of parametersRV,RW, θW,and φW which should be considered to define thedifferent structuring functionsV andW applicable onp. In the sequel, the notation (V,W) ∈ A(p) will beused to indicate that the pair of structuring functions(V,W) presents correct properties with respect toA,and can then be applied on pointp. TheO1.O2 com-plexity is then no longer equal to the previously givenformula, but toO(
∑
p∈E card(A(p))). In the case ofcerebral MRA segmentation, such an atlasA (whichcan be generated by an anatomical property extrac-tion process [15,27]) enables to dramatically reducethe number of HMT applications without altering thequality of the results. Thefitting step of the HMTsegmentation proposed in [14,15] (based on Ronse’sHV,W) can then be defined by:
HA(F) ={
(p, t) ∈ E × T′ |
∃(V,W) ∈ A(p),V(p,t) ≤ F ≤W(p,t)
}
.(1)
The chosenvaluation used for this segmentationmethod is the binary oneB. It has to be noticed thatsince the main purpose of this method is to determinea binary image of the whole vascular structures, itis necessary to finally provide a volumic object. Asthe previously defined set represents a “skeletal” seg-mentation only visualising the centre points of thevessels, a volumic segmentation can be obtained bydilating each segmented point with the foreground el-ement supp(V) which enabled its detection. The finalsegmentation can then be defined by:
⋃
p∈E
{supp(V) ⊕ {p} | ∃t ∈ T′,∃W,
(V,W) ∈ A(p),V(p,t) ≤ F ≤W(p,t)} .
(2)
3.3.2. Heuristic criteria for region-growingsegmentation
While filtering methods tend to apply HMT on eachpoint of the processed image, the use of HMT as aheuristic criterion is quite different, as it consists in ap-plying it only on candidate points during a vessel seg-mentation process. The use of such criteria is generallyconsidered in iterative segmentation processes such
as region-growing or vessel-tracking ones. The appli-cation proposed hereafter is based on region-growingand corresponds to the method described in [13].
Region-growing segmentation consists in startingfrom a seed point, or a seed region which is assumed tobelong to the searched object. It then iteratively addspoints of the image to this seed, until obtaining thewhole structure to be segmented. As a consequence,a region-growing segmentation only requires two el-ements: the seedS ⊂ E and a heuristic criterionC(which can be seen as a Boolean function defined onE and depending on several parameters) indicating ifa candidate point can be added to the currently seg-mented object. The region-growing segmentation ofan imageF can then be formalised as the constructionof a sequence{Sk}k∈N:
S0 = S ,
∀k ≥ 0,Sk+1 =
Sk ∪ {p} if ∃p ∈ N(Sk),
C(E,Sk, p, . . .) = true ,
Sk otherwise .
where N(Sk) represents the set of neighbour pixelsof Sk according to a chosen connexity. The obtainedsegmentation is then given by:
S =∞⋃
k=0
Sk = limk
Sk .
The sequence{Sk}k∈N being increasing, the segmenta-tion process necessarily ends for finite images.
A heuristic criterion based on shape and contrast isused in [13] to characterize bright tubular structures.It is assumed that bright pixels surrounded by a ringof darker ones are likely to be included in a vascu-lar network. This is the principle of the criterion usedto segment the vascular network of the liver. Region-growing segmentation is performed by starting fromthe EPV, this seed being preliminarily detected by thepreviously described filtering method. The criterionused for the region-growing segmentation can be ex-pressed as:
C(F, p) =
true if3
maxi=1
[S KO,Ri (F)](p) > 0 ,
f alse otherwise ,
or:
8

C(F, p) =3∨
i=1
(
[S KO,Ri (F)](p) > 0)
,
whereO = i0,0 (ip,t being the impulse function) is thestructuring element only composed of the origin andRi (i = 1 to 3) are structuring elements used to con-strain the pointp to belong to a tubular structure. Suchstructuring elementsRi are three orthogonal discreterings of radiusr and thicknesst, parallel to the axial,coronal and sagittal planes (see Fig. 8). These two pa-rameters can be used to control the segmentation re-sult by determining the size of the branches detectedduring the region-growing (see Fig. 9 and 10).
Note that in this case, as the criterionC does notvary during the propagation (i.e. it remains the samefor all p ∈ E), the result of the region-growing al-gorithm is equivalent to applying the criterionC toall points and keeping in the resulting binary imagethe connected component containing the seedS (us-ing the same connexity as for the neighborhood func-tion N). However from an algorithmic point of viewit is more interesting to use the region-growing for-mulation since it reduces the complexity: the HMTsare computed only for the points included in the fi-nal result (for which the criterionC is true) and theirneighbors (for which the criterionC is false).
rt
Fig. 8. Discrete ring of radiusr and thicknesst, used to generatestructuring elementsRi involved in the region-growing segmenta-tion process of [13].
3.4. Results
The segmentation methods devoted to the EPV, de-scribed in [12,13], have been applied on a 16 casedataset. The detection of the EPV was successful forall images, leading to a detection rate of 100%. This
segmentation enables to obtain a robust seed (robust inthe sense that small variations in seeds lead to similarresults) used in a second step to segment the hepaticportal network using a region-growing algorithm (de-scribed above and in [13]). As illustrated in Fig. 11,the process provides visually satisfying results. Thenumber of segmented branches and the global qualityof the segmentation are variable between the cases,depending on the quality of the CT-scan acquisition.Indeed, the highlighting of the vascular network ob-tained from the contrast medium varies with the acqui-sition time. This leads to a great variability betweenacquisitions. It should also be noticed that the mainpurpose of these acquisitions remains the highlight-ing of the liver, and not the hepatic network. In suchconditions, the obtained results are quite satisfactorysince the maximal information available in the imagesis extracted. A comparative study has been performedbetween this method and a previous one described in[28–32]. This other method uses also a region-growingalgorithm but involves a criterion based on a fixedthreshold. It has been experimentally observed, on theimage dataset, that the threshold was either set toohigh, leading to poor results (with very few branches),either set too low, leading to an erroneous propaga-tion extending into neighbouring organs. The betterresults obtained from our method are mainly justifiedby the criterion used for segmentation, which relies nolonger on threshold information as in [28–32], but onlocal contrast, which seems actually more robust andaccurate.
The segmentation method proposed in [14,15] hasbeen applied on a dataset composed of 30 cerebralphase-contrast MRA (left part of Fig. 1), presentingdimensions varying from 2562 × 150 to 2562 × 180voxels and millimetric resolution. The obtained binarysegmentations have been compared to those providedby another vessel segmentation process [33], empha-sising imperfect but already promising results in termsof false negatives, and quite satisfying ones in termsof false positives. By comparison with other brain ves-sel segmentation strategies, this method presents spe-cific properties which are strongly linked to the use ofgrey-level HMT. Indeed, since it relies much more onshape properties of the vessels than on intensity prop-erties of the flowing blood, this segmentation processis less sensitive to vascular signal imperfections whichcan happen in MRA, such as aliasing artifacts, signal
9

Fig. 9. Segmentation result of the region-growing segmentation of [13], using the criterionC andRi elements of fixed thicknesst = 1 mmand increasing radii (top left to bottom right:r = 2 mm to r = 9 mm).
Fig. 10. Segmentation result of the region-growing segmentation of [13], using the criterionC and Ri elements of fixed radiusr = 5 mmand increasing thickness (top left to bottom right:t = 2 mm to t = 9 mm).
inhomogeneities or signal loss due to flow turbulence,or patient movement artifacts. This shape-based be-haviour is a major advantage for vessel segmentationapplications which do not require to mainly considerblood intensity, as neurosurgery planning or vascu-lar landmark detection for functional analysis. A seg-mented vascular tree obtained from this dataset, visu-alising both arterial and venous structures of the brain,is illustrated in Fig. 12.
Finally, the different methods proposed in this sec-tion and the results they provide for segmentation ofhepatic and cerebral vessels tend to demonstrate theusefulness and efficiency of the grey-level HMT in
the field of angiographic data analysis, but also inthe more general one of medical image analysis. In-deed, the high adaptiveness of this operator concerningshape and intensity, and its ability to detect structuresby considering their properties but also the propertiesof their neighbourhood, constitute real advantages forapplications related to medical images, where high-level a priori anatomical knowledge about the studiedstructures can often be used to guide image processingtools.
10

Fig. 11. 3D surface rendering visualisation of the portal networkstructures segmented from CT-data of the liver.
Fig. 12. 3D surface rendering visualisation of cerebral vascularstructures segmented from a phase-contrast MRA of the brain.
4. Conclusion
After the unified theory proposed in the first part ofthis paper [1], this second part has presented applica-tive aspects of grey-level HMT. Several vessel segmen-tation methods devoted to 3D angiographic data havebeen described. The accuracy of the results they pro-vide on datasets prove that the underuse of grey-level
HMT is probably unjustified in the fied of medical im-age analysis, and more globally in the field of imageprocessing. The different discussions in the previoussections also emphasize several ways enabling to eas-ily involve grey-level HMT in various general segmen-tation strategies (region-growing, filtering, . . . ), butalso to reduce the computational complexity of HMT-based methods by considering various heuristics. Thisshould convince the reader of the wide applicabilityof these operators in grey-level image processing.
In the field of vessel segmentation from 3D data,further works based on grey-level HMT will now con-sist in improving some of the methods described inthis paper by increasing the adaptiveness of the struc-turing functions used for HMT, in order to improvethe segmentation accuracy and robustness.
AcknowledgementThe authors thank Joseph Baruthio, Jean-Paul
Armspach, Claude Maillot and Luc Soler for theircontribution to the experimental works of this paper.Anatomical images of the head were provided by theradiology service of the Strasbourg University Hospi-tal, while those of the liver came from the ResearchInstitute against Cancer of the Digestive System inStrasbourg. They are grateful to the referee for con-structive suggestions.
References
[1] B. Naegel, N. Passat, C. Ronse, Grey-level hit-or-misstransforms - Part I: Unified theory, Submitted for publication.
[2] R. Schwartz, K. Jones, D. Chernoff, S. Mukherji,R. Khorasani, H. Tice, R. Kikinis, S. Hooton, P. Stieg,J. Polak, Common carotid artery bifurcation: Evaluation withspiral CT, Radiology 185 (2) (1992) 513–519.
[3] C. Dumoulin, H. Hart, Magnetic resonance angiography,Radiology 161 (3) (1986) 717–720.
[4] M. Prince, E. Yucel, J. Kaufman, D. Harrisson, S. Geller,Dynamic gadolinium-enhanced three-dimensional abdominalMR arteriography, Journal of Magnetic Resonance Imaging3 (6) (1993) 877–881.
[5] C. Dumoulin, S. Souza, M. Walker, W. Wagle, Three-dimensional phase contrast angiography, Magnetic Resonancein Medicine 9 (1) (1989) 139–149.
[6] F. Wehrli, A. Shimakawa, G. Gullberg, J. McFall, Time offlight MR flow imaging: Selective saturation recovery withgradient refocusing, Radiology 160 (3) (1986) 781–785.
11

[7] Y. Sun, D. Parker, Performance analysis of maximum intensityprojection for display of MRA data, IEEE Transactions onMedical Imaging 18 (12) (1999) 1154–1169.
[8] K. Buhler, P. Felkel, A. L. Cruz, Geometric methods forvessel visualization and quantification - A survey, TechnicalReport VRVis-2002-035, VRVis Center, Vienna (2002).
[9] P. Felkel, R. Wegenkittl, A. Kanitsar, Vessel tracking inperipheral CTA datasets - An overview, in: SCCG’01 -17th Spring Conference on Computer Graphics, Proceedings,IEEE, Budmerice, Slovakia, 2001, pp. 232–239.
[10] C. Kirbas, F. Quek, A review of vessel extraction techniquesand algorithms, ACM Computing Surveys 36 (2) (2004) 81–121.
[11] J. Suri, K. Liu, L. Reden, S. Laxminarayan, A review onMR vascular image processing: Skeleton versus nonskeletonapproaches: Part II, IEEE Transactions on InformationTechnology in Biomedicine 6 (4) (2002) 338–350.
[12] B. Naegel, C. Ronse, L. Soler, Segmentation automatique del’entree de la veine porte dans le foie par application de latransformee en tout-ou-rien en niveaux de gris, in: ORASIS2003, 9e congres, Proceedings, Gerardmer, France, 2003,pp.33–37.
[13] B. Naegel, C. Ronse, L. Soler, Using grey-scale hit-or-miss transform for segmenting the portal network of theliver, in: C. Ronse, L. Najman, E. Decenciere (Eds.),Mathematical Morphology: 40 years on. Proceedings of the7th International Symposium on Mathematical Morphology,Vol. 30 of Computational Imaging and Vision, Springer SBM,Paris, France, 2005, pp. 429–440.
[14] N. Passat, C. Ronse, J. Baruthio, J.-P. Armspach, Automaticparameterization of grey-level hit-or-miss operators forbrainvessel segmentation, in: ICASSP’05 - 30th InternationalConference on Acoustics, Speech, and Signal Processing,Proceedings, Vol. 2, IEEE, Philadelphia, Pennsylvania, USA,2005, pp. 737–740.
[15] N. Passat, C. Ronse, J. Baruthio, J.-P. Armspach,C. Maillot, Magnetic resonance angiography: Fromanatomical knowledge modeling to vessel segmentation,Medical Image Analysis 10 (2) (2006) 259–274.
[16] P. Soille, Morphological Image Analysis: Principles andApplications, 2nd Edition, Springer-Verlag Berlin Heidelberg,2003.
[17] J. Seneschal, C. Fournier, C. Barat, T. Fournel, Segmentation3D d’hologrammes numeriques de particules par palpagemorphologique : application a l’analyse d’un jet diesel haute-pression, in: GRETSI’03 - 19e colloque GRETSI sur letraitement du signal et des images, Proceedings, Vol. 2, Paris,France, 2003, pp. 311–315.
[18] C. Fournier, C. Barat, C. Ducottet, T. Fournel, Digitalholography applied to PIV hologram reconstruction andselection of a cloud of particles in the reconstructed volume,in: PSFVIP4 - 4th Pacific Symposium on Flow Visualization
and Image Processing, Proceedings, Chamonix, France, 2003,p. F4093.
[19] C. Barat, C. Ducottet, M. Jourlin, Line pattern segmentationusing morphological probing, in: S. Loncaric, A. Neri,H. Babic (Eds.), ISPA’05 - 3rd International Symposiumon Image and Signal Processing and Analysis, Proceedings,Vol. 1, IEEE, Rome, Italy, 2003, pp. 417–422.
[20] D. Bloomberg, Multiresolution morphological approach todocument image analysis, in: ICDAR’91 - 1st InternationalConference on Document Analysis and Recognition,Proceedings, Saint-Malo, France, 1991, pp. 963–971.
[21] D. Bloomberg, P. Maragos, Generalized hit-miss operations,in: P. Gader (Ed.), Image Algebra and Morphological ImageProcessing 1998, Proceedings, Vol. 1350, SPIE, San Diego,California, USA, 1990, pp. 116–128.
[22] P. Soille, On morphological operators based on rank filters,Pattern Recognition 35 (2002) 527–535.
[23] C. Ronse, A lattice-theoretical morphological viewon template extraction in images, Journal of VisualCommunication and Image Representation 7 (3) (1996) 273–295.
[24] D. Bloomberg, L. Vincent, Pattern matching using the blurhit-miss transform, Journal of Electronic Imaging 9 (2) (2000)140–150.
[25] M. van Herk, A fast algorithm for local minimum andmaximum filters on rectangular and octogonal kernels, PatternRecognition Letters 13 (7) (1992) 517–521.
[26] M. Van Droogenbroeck, H. Talbot, Fast computation ofmorphological operations with arbitrary structuring elements,Pattern Recognition Letters 17 (14) (1996) 1451–1460.
[27] N. Passat, C. Ronse, J. Baruthio, J.-P. Armspach, C. Maillot,Cerebral vascular atlas generation for anatomical knowledgemodeling and segmentation purpose, in: C. Schmid, S. Soatto,C. Tomasi (Eds.), Computer Vision and Pattern Recognition -CVPR’05, 23rd International Conference, Proceedings, Vol. 2,IEEE, San Diego, California, USA, 2005, pp. 331–337.
[28] D. Selle, B. Preim, A. Schenk, H.-O. Peitgen, Analysis ofvasculature for liver surgical planning, IEEE Transactions onMedical Imaging 21 (11) (2002) 1344–1357.
[29] D. Selle, T. Schindewolf, C. Evertsz, H. Peitgen, Quantitativeanalysis of CT liver images, in: M. G. K. Doi, H. MacMahon,K. Hoffmann (Eds.), 1st International Workshop on Computer-Aided Diagnosis in Medical Imaging, Proceedings, Elsevier,Chicago, Illinois, USA, 1998, pp. 435–444.
[30] D. Selle, W. Spindler, B. Preim, H.-O. Peitgen, Mathematicalmethods in medical imaging: Analysis of vascular structuresfor liver surgery planning, in: Engquist, Schmid (Eds.),Mathematics Unlimited 2001 and Beyond, Springer, 2001,pp. 1039–1059.
[31] C. Zahlten, H. Jurgens, C. Evertsz, R. Leppek, H. Peitgen,K. Klose, Portal vein reconstruction based on topology,European Journal of Radiology 19 (2) (1995) 96–100.
12

[32] C. Zahlten, H. Jurgens, H. Peitgen, Reconstruction ofbranching blood vessels from CT-data, in: R. Scateni,J. van Wijk, P. Zanarini (Eds.), Visualization in ScientificComputing’95, 6th Workshop, Proceedings, Eurographics,Chia, Italy, 1995, pp. 41–52.
[33] N. Passat, C. Ronse, J. Baruthio, J.-P. Armspach, C. Maillot,C. Jahn, Region-growing segmentation of brain vessels:An atlas-based automatic approach, Journal of MagneticResonance Imaging 21 (6) (2005) 715–725.
Vitae
Benoıt Naegel
Benoıt Naegel was born in 1978. He studied com-puter science at the Universite Louis Pasteur, Stras-bourg (Licence, 1998; M.Sc., 2000; Ph.D., 2004).From 2000 to 2004 he worked on medical image seg-mentation and mathematical morphology at the Re-search Institute Against Cancer of the Digestive Sys-tem (IRCAD) under the guidance of Christian Ronseand Luc Soler. He is presently in post-doctoral fellow-ship as a research assistant at theEcole d’Ingenieursde Geneve (Switzerland). His research interests in-clude image processing and biomedical applicationsof mathematical morphology.
Nicolas Passat
Nicolas Passat was born in 1978. He studied com-puter science at the Universite d’Orleans (Licence,2000) and the Universite Louis Pasteur, Strasbourg(M.Sc., 2002; Ph.D., 2005), specialising in image pro-cessing. During his research practice, he worked atthe LSIIT and IPB-LNV (Universite Louis Pasteur,Strasbourg), on vascular structure segmentation from3D medical images, under the supervision of Chris-tian Ronse and Joseph Baruthio. He is currently inpost-doctoral fellowship at the A2SI Laboratory (Uni-versite de Marne-la-Vallee). His scientific interests in-clude imaging processing, mathematical morphology,and medical imaging.
Christian Ronse
Christian Ronse was born in 1954. He studied puremathematics at the Universite Libre de Bruxelles (Li-
cence, 1976) and the University of Oxford (M.Sc.,1977; Ph.D., 1979), specialising in group theory. Be-tween 1979 and 1991 he was Member of ScientificStaff at the Philips Research Laboratory Brussels,where he conducted research on combinatorics ofswitching circuits, feedback shift registers, discretegeometry, image processing, and mathematical mor-phology. During the academic year 1991-1992 heworked at the Universite Bordeaux-1, where he ob-tained his Habilitation diploma. Since October 1992,he has been Professor of Computer Science at theUniversite Louis Pasteur, Strasbourg (promotion toFirst Class Professorship in 2001), where he con-tributed to the development of a research group onimage analysis, and the teaching of image processingto students at various levels. His scientific interestsinclude imaging theory, mathematical morphology,image segmentation and medical imaging.
13