Embed Size (px)
Citation preview

Gravity Gradient Boom
Design Team: Arthur Inglot, Jack Rafalowski, Gene Rossov, Steve Souza, Jason Stricker
Sponsor: John Hines
In Collaboration with:
Advisor: Gregory Kowalski

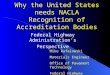
What is a Gravity Gradient Boom
Retracted Deployed
Boom ArmTip Mass
Satellite

Boom Stowed

Attitude ControlAttitude Control
Satellite stabilization Satellite stabilization and controland control Purpose:Purpose:
Maintain communication link to Maintain communication link to satellites antennassatellites antennas
Maintain a desired view for Maintain a desired view for imagingimaging
Heat dissipation and distributionHeat dissipation and distribution
Three AxesThree Axes LocationLocation DirectionDirection

Boom Deployed

Problem StatementProblem Statement
Design and develop a Gravity Gradient Boom as a stand alone Passive Attitude Control for a small satellite, conforming to the requirements put forth by NASA.

ONYXONYX
Project developed by Santa Clara U (Ca)Project developed by Santa Clara U (Ca) Collaboration with NASA, AFOSR and DARPA and part of the Collaboration with NASA, AFOSR and DARPA and part of the
University Nanosatellite Program University Nanosatellite Program OnOnboard autonomboard autonomyy e exxperimentperiment
Purpose:Purpose: To monitor anomalies in orbital motion and resolve them using To monitor anomalies in orbital motion and resolve them using
two independent processing systems autonomously while two independent processing systems autonomously while observing Earth. observing Earth.
Image capturing in multiple spectrumsImage capturing in multiple spectrums Research tool and educational service for K-12 and college Research tool and educational service for K-12 and college
students.students.

ONYXONYX
•30kg
•21cm/hexagonal sides x 42cm tall
•Center of gravity location [X, Y, Z]: [-0.326, 15.5, -0.170] cm
•Moment of inertia about CG: XX: 5.3E6g*cm2
YY: 4.6E6g*cm2
ZZ: 5.0E6g*cm2

Requirements and ConstraintsRequirements and Constraints
Orientation requirements:Orientation requirements: +/- 5 degrees+/- 5 degrees Constraints:Constraints:
MassMass:: <10 kg<10 kg Volume/DimensionsVolume/Dimensions:: 12 x 12 x 15 cm (.00216m12 x 12 x 15 cm (.00216m33 )) PowerPower:: << 30 watts30 watts
Opening on top:Opening on top: 10 cm x 10 cm10 cm x 10 cm
Preliminary Damping:Preliminary Damping: ProvidedProvided
Shock Resistance:Shock Resistance: ±20 Gs±20 Gs
Min. Resonance Freq.:Min. Resonance Freq.: 500 Hz500 Hz

Newton’s Law of Universal Newton’s Law of Universal GravitationGravitation
Low Earth Orbit is 200km-2000kmLow Earth Orbit is 200km-2000km
Mass of Earth is Mass of Earth is 5.9742 x 105.9742 x 102424 kgkg
Radius of Earth is Radius of Earth is 6380 km6380 km
G is the universal constant, G is the universal constant, 6.67 x 106.67 x 10-11-11NmNm22/kg/kg22


The Whole PictureThe Whole Picture

Offset Initial Angle and DampeningOffset Initial Angle and Dampening

Deployment OptionsDeployment Options
Telescoping BoomsTelescoping Booms High torsion and bending High torsion and bending
strengthstrength Intended for many cyclesIntended for many cycles Extreme deployment and Extreme deployment and
retraction forceretraction force
TethersTethers Complicated and costlyComplicated and costly Motor unwinds long Motor unwinds long
lengths of tether material lengths of tether material (2 Km)(2 Km)
Oscillation and reliability Oscillation and reliability concernsconcerns
Prone to space collisionsProne to space collisions
Coilable BoomCoilable Boom Very light weight (< 50g/m)Very light weight (< 50g/m) Stowage size is very smallStowage size is very small Low costLow cost High ReliabilityHigh Reliability

Wire Drum DeployerWire Drum Deployer
Copper-Beryllium Wire wound on a drumCopper-Beryllium Wire wound on a drum Proven Technology with industry backingProven Technology with industry backing Copper-Beryllium provides sufficient tension Copper-Beryllium provides sufficient tension Can be deployed using an electric motor or a passive Can be deployed using an electric motor or a passive
spring assemblyspring assembly Low weight, low cost, and space saving packaging Low weight, low cost, and space saving packaging Due to low weight of overall wire deployer a heavier tip Due to low weight of overall wire deployer a heavier tip
mass may be used to provide more stabilization mass may be used to provide more stabilization Have to account for physical and thermal oscillations, Have to account for physical and thermal oscillations,
additional hardware such as dampers may have to be additional hardware such as dampers may have to be implementedimplemented

Design MatrixDesign MatrixWeight Factor
Multiplier :3X 3X 2X 2X 1X 2X 4X 2X 4X 1X 2X
Deployment Type/Boom
Size/Volume WeightMechanical Complexity
RetractabilityThermal
CharacteristicsPossible Length
Adaptability to other missions
Structural Predictability
Damping/Dynamic
ResponsePower Cost
Wire/Drum 3.8 3.2 3.8 3.4 3 3.8 4 3.2 2.6 3 3.4
Telescoping Tubular 1.6 1.4 2.4 2.8 2.4 2 2.8 3.2 3.6 1.8 2
Tether 1.8 2.2 2 1.6 2 2.2 1.8 1.4 1.6 1.6 2
Coilable 2.8 3.4 1.8 1.8 2.6 2 1.4 2.2 2.2 3.6 2.6
Deployment Type/Boom
Totals
Wire/Drum 88.6
Telescoping Tubular 63.6
Tether 47.6
Coilable 60

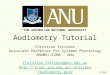
Wire Deployment SystemWire Deployment System
Tungsten Alloy Tip Mass
Delrin Mounting Ring
Frangibolt ® system
Copper Beryllium Wire Spool
Release Solenoid
Deployment Spider
Aluminum 6061 Machined Components
Stowed Configuration Deployed Configuration

The Frangibolt ® SystemThe Frangibolt ® System
•Non-Explosive Actuator
•High Factor of safety
•Consumes 25 Watts
•Yield strength 2200 N
•Compact size
•Flight certified with space heritage


Wire Deployer Wire Deployer
Mounted Deployed

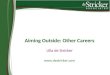
Cosmos Deformation AnalysisCosmos Deformation Analysis
6.295E6 N/m2 6.295E6 N/m2

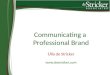
Final Optimized Decisions for Final Optimized Decisions for MATLAB InputMATLAB Input
Length of wire:Length of wire: 20.0 m20.0 m Tip Mass:Tip Mass: 3.00 kg3.00 kg Orbit:Orbit: CircularCircular Altitude:Altitude: 500km500km Inputing the parameters into the MATLAB Inputing the parameters into the MATLAB
program created from ONYX’s data show program created from ONYX’s data show resulted for stabilization.resulted for stabilization.

Stabilization GraphStabilization Graph
Settling Time:9.25 days from 30o +/- 5o tolerance

Proper StabilizationProper Stabilization Gravity Gradient Boom must overcome all disturbance Gravity Gradient Boom must overcome all disturbance
torques in spacetorques in space
Aero Dynamic Torque Aero Dynamic Torque 1.1 x 101.1 x 10-8 N-m
Solar Radiation TorqueSolar Radiation Torque 2.6 x 10-2.6 x 10-6 6 N-mN-m
Magnetic Field TorqueMagnetic Field Torque 8.6 x 10-8.6 x 10-4 4 N-mN-m
Torque Developed by GGBTorque Developed by GGB 3.2 x 10-3.2 x 10-3 3 N-mN-m

Final Optimized ConstraintsFinal Optimized Constraints
System Mass of 3.76kg, (6.24kg Under Max)System Mass of 3.76kg, (6.24kg Under Max)
Center of Mass and Moment of Inertia do not hinder Center of Mass and Moment of Inertia do not hinder
physical properties of the ONYX physical properties of the ONYX
High degree of accuracy with initial accuracy of 5 High degree of accuracy with initial accuracy of 5
degrees stabilizing to as low as 2 degreesdegrees stabilizing to as low as 2 degrees
Low Estimated cost of $4,000Low Estimated cost of $4,000
Highly adaptable to other satellites of similar sizeHighly adaptable to other satellites of similar size

ImprovementsImprovements
Improve modeling for FEA Vibration Improve modeling for FEA Vibration
analysisanalysis
Improve metal on metal contactImprove metal on metal contact
Integrate the use of a DC motor for more Integrate the use of a DC motor for more
controlcontrol

Any questions? Any questions?