-
Gravitational-Wave Physics and Astronomy
Jolien D. E. Creighton, Warren G. Anderson
An Introduction to Theory, Experiment and Data Analysis
WILEY SERIES IN COSMOLOGY
le-texDateianlage9783527636051.jpg
-
Jolien D. E. Creighton andWarren G. AndersonGravitational-Wave
Physicsand Astronomy
-
Related Titles
Stahler, S. W., Palla, F.
The Formation of Stars2004
ISBN: 978-3-527-40559-6
Roos, M.
Introduction to Cosmology
2003
ISBN: 978-0-470-84910-1
Liddle, A.
An Introduction to Modern Cosmology
2003ISBN: 978-0-470-84835-7
-
Jolien D. E. Creighton and Warren G. Anderson
Gravitational-Wave Physicsand Astronomy
An Introduction to Theory, Experimentand Data Analysis
WILEY-VCH Verlag GmbH & Co. KGaA
-
The Authors
Dr. Jolien D. E. CreightonUniversity of
Wisconsin–MilwaukeeDepartment of PhysicsP.O. Box 413Milwaukee, WI
[email protected]
Dr. Warren G. AndersonUniversity of
Wisconsin–MilwaukeeDepartment of PhysicsP.O. Box 413Milwaukee, WI
[email protected]
CoverPost-Newtonian apples created by TevietCreighton. Hubble
ultra-deep field image(NASA, ESA, S. Beckwith STScl and the
HUDFTeam).
All books published by Wiley-VCH are carefullyproduced.
Nevertheless, authors, editors, andpublisher do not warrant the
informationcontained in these books, including this book, tobe free
of errors. Readers are advised to keep inmind that statements,
data, illustrations,procedural details or other items
mayinadvertently be inaccurate.
Library of Congress Card No.: applied for
British Library Cataloguing-in-Publication Data:A catalogue
record for this book is availablefrom the British Library.
Bibliographic information published by theDeutsche
NationalbibliothekThe Deutsche Nationalbibliothek lists
thispublication in the Deutsche Nationalbibliografie;detailed
bibliographic data are available on theInternet at
http://dnb.d-nb.de.
© 2011 WILEY-VCH Verlag GmbH & Co. KGaA,Boschstr. 12, 69469
Weinheim, Germany
All rights reserved (including those of translationinto other
languages). No part of this book maybe reproduced in any form – by
photoprinting,microfilm, or any other means – nor transmittedor
translated into a machine language withoutwritten permission from
the publishers. Regis-tered names, trademarks, etc. used in this
book,even when not specifically marked as such, arenot to be
considered unprotected by law.
Typesetting le-tex publishing services GmbH,LeipzigCover Design
Adam-Design, WeinheimPrinting and Binding
Printed in SingaporePrinted on acid-free paper
ISBN Print 978-3-527-40886-3
ISBN ePDF 978-3-527-63605-1ISBN oBook 978-3-527-63603-7ISBN ePub
978-3-527-63604-4
-
V
JDEC: To my grandmother.
WGA: To my parents, who never asked me to stop asking why,
although they did stopanswering after a while, and to family,
Lynda, Ethan and Jacob, who give me the space Ineed to continue
asking.
-
VII
Contents
Preface XI
List of Examples XIII
Introduction 1References 2
1 Prologue 31.1 Tides in Newton’s Gravity 31.2 Relativity 8
2 A Brief Review of General Relativity 112.1 Differential
Geometry 122.1.1 Coordinates and Distances 122.1.2 Vectors 142.1.3
Connections 162.1.4 Geodesics 242.1.5 Curvature 252.1.6 Geodesic
Deviation 312.1.7 Ricci and Einstein Tensors 322.2 Slow Motion in
Weak Gravitational Fields 322.3 Stress-Energy Tensor 342.3.1
Perfect Fluid 362.3.2 Electromagnetism 382.4 Einstein’s Field
Equations 382.5 Newtonian Limit of General Relativity 402.5.1
Linearized Gravity 402.5.2 Newtonian Limit 432.5.3 Fast Motion
442.6 Problems 45
References 47
3 Gravitational Waves 493.1 Description of Gravitational Waves
493.1.1 Propagation of Gravitational Waves 55
-
VIII Contents
3.2 Physical Properties of Gravitational Waves 583.2.1 Effects
of Gravitational Waves 583.2.2 Energy Carried by a Gravitational
Wave 663.3 Production of Gravitational Radiation 693.3.1 Far- and
Near-Zone Solutions 693.3.2 Gravitational Radiation Luminosity
743.3.3 Radiation Reaction 783.3.4 Angular Momentum Carried by
Gravitational Radiation 803.4 Demonstration: Rotating Triaxial
Ellipsoid 803.5 Demonstration: Orbiting Binary System 843.6
Problems 91
References 95
4 Beyond the Newtonian Limit 974.1 Post-Newtonian 974.1.1 System
of Point Particles 1044.1.2 Two-Body Post-Newtonian Motion 1094.1.3
Higher-Order Post-Newtonian Waveforms for Binary Inspiral 1144.2
Perturbation about Curved Backgrounds 1144.2.1 Gravitational Waves
in Cosmological Spacetimes 1194.2.2 Black Hole Perturbation 1234.3
Numerical Relativity 1304.3.1 The Arnowitt–Deser–Misner (ADM)
Formalism 1304.3.2 Coordinate Choice 1394.3.3 Initial Data 1414.3.4
Gravitational-Wave Extraction 1434.3.5 Matter 1434.3.6 Numerical
Methods 1444.4 Problems 145
References 147
5 Sources of Gravitational Radiation 1495.1 Sources of
Continuous Gravitational Waves 1515.2 Sources of Gravitational-Wave
Bursts 1575.2.1 Coalescing Binaries 1575.2.2 Gravitational Collapse
1655.2.3 Bursts from Cosmic String Cusps 1695.2.4 Other Burst
Sources 1705.3 Sources of a Stochastic Gravitational-Wave
Background 1715.3.1 Cosmological Backgrounds 1725.3.2 Astrophysical
Backgrounds 1915.4 Problems 194
References 196
6 Gravitational-Wave Detectors 1976.1 Ground-Based Laser
Interferometer Detectors 198
-
Contents IX
6.1.1 Notes on Optics 2036.1.2 Fabry–Pérot Cavity 2076.1.3
Michelson Interferometer 2116.1.4 Power Recycling 2146.1.5 Readout
2166.1.6 Frequency Response of the Initial LIGO Detector 2216.1.7
Sensor Noise 2266.1.8 Environmental Sources of Noise 2306.1.9
Control System 2396.1.10 Gravitational-Wave Response of an
Interferometric Detector 2416.1.11 Second Generation Ground-Based
Interferometers (and Beyond) 2446.2 Space-Based Detectors 2516.2.1
Spacecraft Tracking 2516.2.2 LISA 2526.2.3 Decihertz Experiments
2566.3 Pulsar Timing Experiments 2566.4 Resonant Mass Detectors
2606.5 Problems 265
References 267
7 Gravitational-Wave Data Analysis 2697.1 Random Processes
2697.1.1 Power Spectrum 2707.1.2 Gaussian Noise 2737.2 Optimal
Detection Statistic 2757.2.1 Bayes’s Theorem 2757.2.2 Matched
Filter 2767.2.3 Unknown Matched Filter Parameters 2777.2.4
Statistical Properties of the Matched Filter 2797.2.5 Matched
Filter with Unknown Arrival Time 2817.2.6 Template Banks of Matched
Filters 2827.3 Parameter Estimation 2867.3.1 Measurement Accuracy
2867.3.2 Systematic Errors in Parameter Estimation 2897.3.3
Confidence Intervals 2917.4 Detection Statistics for Poorly
Modelled Signals 2937.4.1 Excess-Power Method 2937.5 Detection in
Non-Gaussian Noise 2957.6 Networks of Gravitational-Wave Detectors
2987.6.1 Co-located and Co-aligned Detectors 2987.6.2 General
Detector Networks 3007.6.3 Time-Frequency Excess-Power Method for a
Network of Detectors 3037.6.4 Sky Position Localization for
Gravitational-Wave Bursts 3057.7 Data Analysis Methods for
Continuous-Wave Sources 3077.7.1 Search for Gravitational Waves
from a Known, Isolated Pulsar 309
-
X Contents
7.7.2 All-Sky Searches for Gravitational Waves from Unknown
Pulsars 3167.8 Data Analysis Methods for Gravitational-Wave Bursts
3177.8.1 Searches for Coalescing Compact Binary Sources 3187.8.2
Searches for Poorly Modelled Burst Sources 3327.9 Data Analysis
Methods for Stochastic Sources 3337.9.1 Stochastic
Gravitational-Wave Point Sources 3447.10 Problems 345
References 347
8 Epilogue: Gravitational-Wave Astronomy and Astrophysics 3498.1
Fundamental Physics 3498.2 Astrophysics 351
References 353
Appendix A Gravitational-Wave Detector Data 355A.1
Gravitational-Wave Detector Site Data 355A.2 Idealized Initial LIGO
Model 359
References 361
Appendix B Post-Newtonian Binary Inspiral Waveform 363B.1
TaylorT1 Orbital Evolution 366B.2 TaylorT2 Orbital Evolution 366B.3
TaylorT3 Orbital Evolution 367B.4 TaylorT4 Orbital Evolution 368B.5
TaylorF2 Stationary Phase 369
References 370
Index 371
-
XI
Preface
During the writing of this book we often had to escape the
office for week-longmini-sabbaticals. We would like to thank the
Max-Planck-Institut für Gravitations-physik
(Albert-Einstein-Institute) in Hannover, Germany, for hosting us
for one ofthese sabbaticals, the Warren G. Anderson Office of
Gravitational Wave Research inCalgary, Alberta for hosting a second
one, the University of Minnesota for hostinga third and the
University of Cardiff for our final retreat.
We thank, in no particular order (other than alphabetic), Bruce
Allen, PatrickBrady, Teviet Creighton, Stephen Fairhurst, John
Friedman, Judy Giannakopoulou,Brennan Hughey, Lucía Santamaría
Lara, Vuk Mandic, Chris Messenger, EvanOchsner, Larry Price,
Jocelyn Read, Richard O’Shaughnessy, Bangalore Sathyapra-kash,
Peter Saulson, Xavier Siemens, Amber Stuver, Patrick Sutton, Ruslan
Vaulin,Alan Weinstein, Madeline White and Alan Wiseman for a great
deal of assistance.
This work was supported by the National Science Foundation
grants PHY-0701817, PHY-0600953 and PHY-0970074.
Calgary, June 2011 J.D.E.C.
-
XIII
List of Examples
Example 1.1 Coordinate acceleration in non-inertial frames of
reference 4Example 1.2 Tidal acceleration 6Example 2.1
Transformation to polar coordinates 13Example 2.2 Volume element
14Example 2.3 How are directional derivatives like vectors?
15Example 2.4 Flat-space connection in polar coordinates 18Example
2.5 Flat-space connection in polar coordinates (again) 20Example
2.6 Equation of continuity 21Example 2.7 Vector commutation
23Example 2.8 Lie derivative 24Example 2.9 Curvature 27Example 2.10
Riemann tensor in a locally inertial frame 28Example 2.11 Geodesic
deviation in the weak-field slow-motion limit 34Example 2.12 The
Euler equations 37Example 2.13 Equations of motion for a point
particle 39Example 2.14 Harmonic coordinates 42Example 3.1
Transformation from TT coordinates to a locally inertial frame
53Example 3.2 Wave equation for the Riemann tensor 55Example 3.3
Attenuation of gravitational waves 57Example 3.4 Degrees of freedom
of a plane gravitational wave 60Example 3.5 Plus- and
cross-polarization tensors 62Example 3.6 A resonant mass detector
65Example 3.7 Order of magnitude estimates of gravitational-wave
amplitude 72Example 3.8 Fourier solution for the gravitational wave
73Example 3.9 Order of magnitude estimates of gravitational-wave
luminosity 75Example 3.10 Gravitational-wave spectrum 76Example
3.11 Cross-section of a resonant mass detector 77Example 3.12 Point
particle in rotating reference frame 83Example 3.13 The Crab pulsar
84Example 3.14 Newtonian chirp 89Example 3.15 The Hulse–Taylor
binary pulsar 90Example 4.1 Effective stress-energy tensor
100Example 4.2 Amplification of gravitational waves by inflation
122
-
XIV List of Examples
Example 4.3 Black hole ringdown radiation 129Example 4.4 Analogy
with electromagnetism 135Example 4.5 The BSSN formulation
136Example 5.1 Blandford’s argument 156Example 5.2 Rate of binary
neutron star coalescences in the Galaxy 159Example 5.3
Chandrasekhar mass 166Example 6.1 Stokes relations 204Example 6.2
Dielectric mirror 205Example 6.3 Anti-resonant Fabry–Pérot cavity
209Example 6.4 Michelson interferometer gravitational-wave detector
212Example 6.5 Radio-frequency readout 219Example 6.6 Standard
quantum limit 228Example 6.7 Derivation of the
fluctuation–dissipation theorem 232Example 6.8 Coupled oscillators
261Example 7.1 Shot noise 272Example 7.2 Unknown amplitude
278Example 7.3 Sensitivity of a matched filter gravitational-wave
search 280Example 7.4 Unknown phase 284Example 7.5 Measurement
accuracy of signal amplitude and phase 288Example 7.6 Systematic
error in estimate of signal amplitude 289Example 7.7 Frequentist
upper limits 292Example 7.8 Time-frequency excess-power statistic
295Example 7.9 Nullspace of two co-aligned, co-located detectors
302Example 7.10 Nullspace of three non-aligned detectors 302Example
7.11 Sensitivity of the known-pulsar search 315Example 7.12 Horizon
distance and range 322Example 7.13 Overlap reduction function in
the long-wavelength limit 336Example 7.14 Hellings–Downs curve
337Example 7.15 Sensitivity of a stochastic background search
343Example A.1 Antenna response beam patterns for interferometer
detectors 358
-
1
Introduction
This work is intended both as a textbook for an introductory
course on gravitational-wave astronomy and as a basic reference on
most aspects in this field of research.
As part of the syllabus of a course on gravitational waves, this
book could be usedto follow a course on General Relativity (in
which case, the first chapter could begreatly abbreviated), or as
an introductory graduate course (in which case the firstchapter is
required reading for what follows). Not all material would be
covered ina single semester.
Within the text we include examples that elucidate a particular
point describedin the main text or give additional detail beyond
that covered in the body. At theend of each chapter we provide a
short reference section that contains suggestedfurther reading. We
have not attempted to provide a complete list of work in thefield,
as one might have in a review article; rather we provide references
to seminalpapers, to works of particular pedagogic value, and to
review articles that will pro-vide the necessary background for
researchers. Each chapter also has a selection ofproblems.
Please see http://www.lsc-group.phys.uwm.edu/~jolien for an
errata for thisbook. If you find errors that are not currently
noted in the errata, please [email protected].
Conventions
We use bold sans-serif letters such as T and u to represent
generic tensors andspacetime vectors, and italic bold letters such
as v to represent purely spatial vec-tors. When writing the
components of such objects, we use Greek letters for theindices for
tensors on spacetime, Tα� and uα , while we use Latin letters for
theindices for spatial vectors or matrices, for example v i and Mi
j . Spacetime in-dices normally run over four values, so α 2 f0, 1,
2, 3g, while spatial indices nor-mally run over three values, i 2
f1, 2, 3g, unless otherwise specified. We em-ploy the Einstein
summation convention where there is an implied sum over re-peated
indices (known as dummy indices), so that Tαμ uμ D P3μD0 Tαμ uμ
andMi j v j D
P3j D1 Mi j v j . In these examples, the indices α and i are not
contracted
Gravitational-Wave Physics and Astronomy, First Edition. Jolien
D. E. Creighton, Warren G. Anderson.© 2011 WILEY-VCH Verlag GmbH
& Co. KGaA. Published 2011 by WILEY-VCH Verlag GmbH & Co.
KGaA.
-
2 Introduction
and are called free indices (that is, these are actually four
equations in the first caseand three equations in the second case
since α can have the values 0, 1, 2, or 3,while i can have the
values 1, 2, or 3).
We distinguish between the covariant derivative, rα , and the
three-space gradi-ent operator
Δ
, which is the operator @/@x i in Cartesian coordinates. The
Lapla-cian is
Δ2 D @2/@x2 C @2/@y 2 C @2/@z2 in Cartesian coordinates, and the
flat-spaced’Alembertian operator is � D �c�2@2/@t2 C Δ2 in
Cartesian coordinates.
Our spacetime sign convention is �, C, C, C so that flat
spacetime in Cartesiancoordinates has the line element d s2 D �c2 d
t2 C dx2 C d y 2 C dz2. The signconventions of common tensors
follow that of Misner et al. (1973) and Wald (1984).
The Fourier transform of some time series x (t) is used to find
the frequency seriesQx ( f ) according to
Qx ( f ) D1Z
�1x (t)e�2π i f t d t , (0.1)
while
x (t) D1Z
�1Qx ( f )e2π i f t d f (0.2)
is the inverse Fourier transform.
References
Misner, C.W., Thorne, K.S. and Wheeler, J.A.(1973) Gravitation,
Freeman, San Francisco.
Wald, R.M. (1984) General Relativity, Universi-ty of Chicago
Press.
-
3
1Prologue
1.1Tides in Newton’s Gravity
A brief review of Newtonian gravity is useful not only as a
limit of weak-field rela-tivistic gravity, but also as a reminder
of the principles upon which general relativitywas formulated.
Newtonian gravity is conveniently formulated in a fixed
rectilinearcoordinate system in terms of an absolute time
coordinate. In such coordinates asthese, Newton’s laws of motion
and gravitation describe the motion of a body ofmass m falling
freely about another body of mass M by the force
F D m d2x
d t2D � G M mkx � x 0k3 (x � x
0) , (1.1)
where x is the position of the body with mass m, x 0 is the
position of the body withmass M, t is the absolute time coordinate,
and G ' 6.673 � 10�11 m3 kg�1 s�2 isNewton’s gravitational
constant. Famously, the quantity m cancels and
d2xd t2
D � G Mkx � x 0k3 (x � x0) . (1.2)
If there is a continuous distribution of matter then we can sum
up all contributionsto the acceleration from all pieces of the
distribution to obtain
d2xd t2
D �GZ
body
x � x 0kx � x 0k3 �(x
0)d3x 0 D Δ
264G Zbody
�(x 0)kx � x 0k d
3x 0
375 , (1.3)where � is the mass distribution (density) and
Δ
is the gradient operator in x .Therefore, the acceleration of
the body (with respect to the Newtonian system ofrectilinear
coordinates) is
a D d2x
d t2D � ΔΦ (x) , (1.4)
where
Φ (x) WD �GZ
body
�(x 0)kx � x 0k d
3x 0 (1.5)
Gravitational-Wave Physics and Astronomy, First Edition. Jolien
D. E. Creighton, Warren G. Anderson.© 2011 WILEY-VCH Verlag GmbH
& Co. KGaA. Published 2011 by WILEY-VCH Verlag GmbH & Co.
KGaA.
-
4 1 Prologue
is the Newtonian potential. The Newtonian potential satisfies
the Poisson equation
Δ2Φ (x) D �GZ
�(x 0)
Δ2 1kx � x 0k d
3x 0 D 4πG�(x ) , (1.6)
where we have used
Δ2 1kx � x 0k D �4πδ(x � x
0) . (1.7)
Because the mass of the falling body does not enter into the
equations of motion,any two bodies will fall the same way. If you
can only see nearby free-falling bodies,you cannot tell whether
you’re falling or not. You feel the same if you are freelyfalling
toward some massive object as you would if you were in no
gravitationalfield whatsoever. The gravitational acceleration
describes the motion of the fallingbody with respect to the
absolute Newtonian coordinates – but is there any way fora freely
falling observer to know if they are accelerating or not?
Einstein codified the observation that freely falling objects
fall together as a prin-ciple known as the equivalence principle: a
freely falling observer could always setup a local (freely falling)
frame in which all the laws of physics are the same as theywould be
if that observer were not in a gravitational field. The coordinate
acceler-ation a does not have any physical importance (as it does
in Newtonian gravity)because one can always choose a frame of
reference – freely falling with the ob-server – in which the
observer is at rest.
Example 1.1 Coordinate acceleration in non-inertial frames of
reference
An inertial frame of reference in Newtonian mechanics is any
frame of referencethat can be related to the absolute Newtonian
frame of reference by a uniformvelocity and a constant translation
of position. That is, if x is the location of aparticle in one
inertial frame of reference, then another inertial frame of
referencewill have x 0 D x � x0 � v t for some constant vectors x0
and v . Inertial framespreserve the form of Newton’s second law
since a0 D d2x 0/d t2 D d2x/d t2 D a.
In non-Cartesian coordinates, however, the form of the
coordinate acceleration isdifferent. For example, for a
two-dimensional system we could express the locationof a particle
in polar coordinates r D (x2 C y 2)1/2 and φ D arctan(y/x ). In
thesecoordinates, the coordinate velocity of a particle is given by
dr/d t D v � e r anddφ/d t D r�1v � eφ where e r and eφ are unit
vectors in the r- and φ-directions,and the equations of motion for
the particle are Fr D m[d2r/d t2 C r(dφ/d t)2]and Fφ D m[d2φ/d t2 C
2r�1(dr/d t)(dφ/d t)]. Even when there is no force on theparticle,
F D 0, there is still a coordinate acceleration in that d2r/d t2
and d2φ/d t2do not vanish except for purely radial motion. This
merely arises because of thechoice of non-Cartesian coordinates –
the geometrical form of Newton’s secondlaw, F D ma still holds.
A non-inertial frame is a frame that is accelerating relative to
an inertial frame.A common example is a uniformly rotating
reference frame with angular velocityvector ω. In such a reference
frame, Newton’s second law has the form F D ma C
-
1.1 Tides in Newton’s Gravity 5
mω � (ω � r) C 2mω � v where the two additional terms, the
centrifugal force,mω � (ω � r) and the Coriolis force, 2mω � v ,
arise because the frame of referenceis non-inertial. These are
known as fictitious forces.
A freely falling frame of reference in Newtonian theory is a
non-inertial frame ofreference because it is accelerating relative
to the absolute set of Newtonian coor-dinates. The following
coordinate transformation relates a freely falling frame
ofreference (primed coordinates) at point x0 with the absolute
Newtonian coordi-nates (unprimed): x 0 D x � x0 � 12 g t2, where g
D �
Δ
Φ (x0) is a constant. It isstraightforward to see that a0 D d2x
0/d t2 D � Δ[Φ (x) � Φ (x0)] which vanishes atpoint x0.
In fact, there is a way to tell if you are falling. If there is
another object that issome small distance away from you then its
acceleration will be slightly different.Suppose � is the vector
pointing from you to the other object. The acceleration ofthat
object is
a(x C � ) D a(x ) C (� � Δ)a(x ) C O(�2) (1.8)and so the
relative acceleration or tidal acceleration is
Δai D �� j @2Φ
@x i@x jD �Ei j � j , (1.9)
where
Ei j WD @2 Φ
@x i@x j(1.10)
is known as the tidal tensor field. The tidal acceleration is
not really local since itdepends on the separation � between
falling bodies. The tidal field, however, is alocal quantity, and
it encodes the presence of the gravitational field. We will see
laterthat in General Relativity, the tidal field is a measure of
the spacetime curvature.
In the above expressions, the indices i and j run over the three
spatial coordinatesfx1, x2, x3g or equivalently fx , y , zg and � i
is the ith component of the vector � .(The three components of the
vector are �1, �2 and �3 so we would write � i D[�1, �2, �3].) The
tidal field is a rank-2 tensor having nine components: E11, E12,
E13,E21, E22, E23, E31, E32 and E33. It is symmetric: E12 D E21,
E13 D E31 and E23 D E32,or, more concisely, Ei j D E j i .
Einstein’s summation convention is being used here:there is an
implicit summation over repeated indices. That is, the
expression
Ei j � j
is short-hand for3X
j D1Ei j � j D Ei1�1 C Ei2�2 C Ei3�3 .
For example, if two objects are separated in the x3- or
z-direction, so that �1 and�2 both vanish, then the three
components of the tidal acceleration are
Δa1 D �E13�3 , Δa2 D �E23�3 , and Δa3 D �E33�3 .
-
6 1 Prologue
Example 1.2 Tidal acceleration
Consider a body falling toward the Earth. The Newtonian
potential is
Φ D � G M˚(x2 C y 2 C z2)1/2 . (1.11)
The tidal field component E11 is
E11 D @2 Φ
@x2D �G M˚
�3
x2
(x2 C y 2 C z2)5/2 �1
(x2 C y 2 C z2)3/2�
, (1.12)
the tidal field component E12 is
E12 D @2Φ
@x@yD �G M˚
�3
x y(x2 C y 2 C z2)5/2
�, (1.13)
and so forth. The components can be written concisely as
Ei j D � G M˚r5�3xi x j � δ i j r2
�, (1.14)
where r D (x2 C y 2 C z2)1/2 and δ i j is the Kronecker
delta,
δ i j WD(
1 i D j0 i ¤ j , (1.15)
and so xi D δ i j x j .Suppose that a reference body is on the
z-axis at a distance r D z from the centre
of the Earth. Then the tidal tensor is
Ei j D G M˚r3
241 0 00 1 00 0 �2
35 . (1.16)Consider a nearby second body that is also on the
z-axis, a distance Δz farther
from the centre of the Earth. The relative tidal acceleration of
this body is
Δai D �Ei j � j D �Ei3Δz . (1.17)The only non-vanishing
component is the z-component:
Δa3 D 2 G M˚r3 Δz . (1.18)A third body is next to the reference
body, lying a small distance Δx away on the
x-axis. The relative tidal acceleration of this body is
Δai D �Ei j � j D �Ei1Δx (1.19)and the only non-vanishing
component is the x-component:
Δa1 D � G M˚r3 Δx . (1.20)Notice that a collection of freely
falling objects will be pulled apart along the
direction in which they are falling while being squeezed
together in the orthogonaldirections.
-
1.1 Tides in Newton’s Gravity 7
Unlike the coordinate acceleration, the tidal acceleration has
intrinsic physicalmeaning. We witness ocean tides caused by the
Moon and the Sun. These tidesdissipate energy on the Earth. That
is, tidal forces can do work. To compute thework, consider an
extended body (say, the Earth) moving within a tidal field
pro-duced by another body (say, the Moon). An element of the
extended body, locatedat a position x and having mass �(x )d3x ,
experiences a tidal force
Fi D �Ei j x j �(x )d3x . (1.21)If the element is moving through
the tidal field with velocity v then there is anamount Fi v i of
work per unit time done on that element. Summing over all ele-ments
that comprise the body yields the total amount of tidal work:
d Wdt
D �Z
body
Ei j v i x j �(x )d3x
D � 12Ei j
dd t
Zbody
x i x j �(x )d3x
D � 12Ei j
d I i j
d t, (1.22)
where
I i j WDZ
body
x i x j �(x )d3x (1.23)
is the quadrupole tensor. Note that this tensor is closely
related to the moment ofinertia tensor
Ii j WD�δ i j δk l � δ i k δ j l
�I k l D
Zbody
�r2δ i j � xi x j
��(x )d3x (1.24)
and also to the (traceless) reduced quadrupole tensor
I i j WD�
δ i k δ j l � 13 δ i j δk l
I k l DZ
body
�xi x j � 13 r
2δ i j
�(x )d3x . (1.25)
Here r2 D kxk2 D δ i j x i x j .Tidal work can also be performed
by a dynamical system with a time-changing
tidal field Ei j (t). The work performed by such a system on
another body with aquadrupole tensor I i j is found by integrating
Eq. (1.22) by parts:
W D � 12Ei j I i j
ˇ̌T0 C
12
TZ0
dEi jd t
I i j d t . (1.26)
The first term is bounded, while the second term secularly
increases with time andrepresents a transfer of energy from the
dynamical system that is producing the
-
8 1 Prologue
time-changing tidal field to the other body. For example, the
source of the time-changing tidal field might be a rotating
dumbbell or a binary system of two stars inorbit about each other.
Over a long time (large T ) the secularly growing term
willdominate, and we can write the work done by the dynamical
source on the bodywith moment of inertia tensor I i j as
d Wdt
� 12
dEi jd t
I i j . (1.27)
1.2Relativity
The special theory of relativity postulates that there is no
preferred inertial frame:local measurements of physical quantities
are the same no matter which inertialframe the measurement is made
in. This is the principle of relativity. In particular,measurements
of the speed of light in any inertial frame will always yield the
samevalue, c WD 299 792 458 m s�1. The consequence of this is that
the Newtonian sep-aration of space and time must be abandoned.
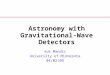
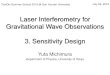
Consider a spaceship travelling at aconstant speed v in the
x-direction relative to the Earth (see Figure 1.1). Within
thespaceship, an experimental determination of the speed of light
is made in which aphoton is emitted from a source in the
y-direction, reflected by a mirror a distance12 Δy away from the
source, and received back at the source. The time-of-flight Δτis
measured and the speed of light c D Δy/Δτ is computed. For an
observer onthe Earth, however, the distance travelled by the photon
is [(Δx )2C(Δy )2]1/2, whereΔx D vΔ t and Δ t is the amount of time
the observer on the Earth determines ittakes the photon to travel
from the emitter to the receiver. Since the observer onEarth must
measure the same speed of light, c D [(Δx )2 C (Δy )2]1/2/Δ t, we
seethat
c2 D (Δx )2 C (Δy )2(Δ t)2
D (Δx )2 C (cΔτ)2(Δ t)2
, (1.28)
where we have used Δy D cΔτ, and so
c2(Δτ)2 D c2(Δ t)2 � (Δx )2 . (1.29)
y
x = v t
t = t t = tt = 0
Figure 1.1 A measurement of the speed oflight, performed in a
rocket moving at speedv relative to the Earth, as seen by an
observeron the Earth. A flash of light is produced att D 0. The
light travels a vertical distance
12 Δy , reflects off of the mirror and returnsto the source
after a time Δ t (as measuredby the observer on the Earth). The
rocket hasmoved a horizontal distance Δx D vΔ t inthis time.
-
1.2 Relativity 9
The usual time dilation formula Δ t D γ Δτ, where γ D (1 �
v2/c2)�1/2 is theLorentz factor, follows by setting Δx D vΔ t. This
relationship between how timeis measured within the moving frame of
the spaceship to how time is measuredon Earth is not particular to
the experiment with the photon: time really does movedifferently in
the different inertial frames of reference.
Equation (1.29) relates the amount of time Δτ between two
events, as recorded inan inertial frame in which the two events
occur at the same spatial position (whichis known as the proper
time between the two events), to the amount of time Δ tbetween the
same two events as seen in an inertial frame in which the two
eventsare separated by a spatial distance Δx . Since the notion of
an absolute time is lost inspecial relativity, we understand time
to simply be a new coordinate which, alongwith the three spatial
coordinates, depends on the frame of reference. Together,the time
and space coordinates are used to identify points (or events) on a
four-dimensional spacetime. For rectilinear coordinates in an
inertial frame, we definean invariant interval (Δ s)2 between two
points in spacetime, (t, x , y , z) and (t CΔ t, x C Δx , y C Δy ,
z C Δz), by
(Δ s)2 WD �c2(Δ t)2 C (Δx )2 C (Δy )2 C (Δz)2 , (1.30)
which has the same form as the Pythagorean theorem except for
the factor of �c2in front of the square of the time interval. This
equation is just a generalization ofEq. (1.29) with (Δ s)2 WD
�c2(Δτ)2.
Special relativity is incompatible with Newtonian gravity
because Newton’s lawof gravitation defines a force between two
distant bodies in terms of their separa-tion at a given instant in
time. However, in special relativity, there is no uniquenotion of
simultaneity. In addition, different frames of reference will make
differ-ent measurements of the Newtonian gravitational force, a
result that is at odds withthe principle of relativity.
The general theory of relativity provides a description of
gravity in terms of a curvedspacetime. This is discussed in Chapter
2. In general relativity, the inertial framesof reference are
freely falling frames, and the principle of relativity is then
takento hold in such frames of reference. Tidal acceleration is the
physical manifesta-tion of gravitation, but measurement of a tidal
field requires a somewhat extendedapparatus.
Of course, Newtonian gravity must be recovered in some limit of
general relativ-ity: this limit is when G M/(c2R) � 1 and v/c � 1
where M is the characteristicmass of the system, R is the
characteristic size of the system, and v is the charac-teristic
speed of bodies in the system. And since in Newtonian gravity a
changingtidal field is capable of producing work on distant bodies,
this must be true in gen-eral relativity as well. This means that
in order to ensure that energy is conserved,energy must be radiated
from the gravitating system that is producing the chang-ing tidal
field to the rest of the universe, because there is no way that the
bodieson which the work is done can create an instantaneous
reactive force on the grav-itating system – this would be
incompatible with relativity. The radiation is calledgravitational
radiation.
-
11
2A Brief Review of General Relativity
The intent of this chapter is to provide a brief review of
General Relativity and tointroduce the concepts and notation that
are required for the discussion of grav-itational waves in
subsequent chapters. The review will not be comprehensive asthere
are many excellent introductory texts on General Relativity: Hartle
(2003) is aclear, physics-first introduction to the subject, and
Schutz (2009) is another excel-lent text for a first course in
General Relativity. The classic Misner et al. (1973) is acomplete
reference book. Advanced texts include Wald (1984) and Weinberg
(1972)which have very different approaches but are both essential
reading.
The principle of relativity – a foundation of Einstein’s theory
of Special Relativity –suggests that there is no preferred frame of
reference or state of motion. Physicaltheory needs to be formulated
in a manner in which physical quantities are invari-ant under a
class of transformations known as Poincaré transformations. That
is,physics is invariant under translations, rotations and boosts.
Special relativity canbe elegantly formulated on a four-dimensional
spacetime in which the three normalspatial dimensions and a time
dimension are combined.
To describe relativistic gravity, Einstein extended the
principle of relativity to anew principle, the principle of general
covariance, which demands that there is nopreferred coordinate
system at all. For example, a freely falling observer can
alwaysconstruct a freely falling frame of reference and any
physical experiment carriedout in that frame of reference must give
the same results as a similar experimentcarried out by an observer
who is not in any gravitational field whatsoever. Einsteindescribed
gravity in terms of a curved spacetime in which particles naturally
followthe straightest possible lines – not necessarily straight
lines in some predeterminedcoordinate system – and the physical
effects of gravity can then be understood interms of the curvature
of spacetime. For example, the tidal field is related to
thecurvature tensor. The curvature is produced, to some extent, by
the masses inspacetime.
Gravitational-Wave Physics and Astronomy, First Edition. Jolien
D. E. Creighton, Warren G. Anderson.© 2011 WILEY-VCH Verlag GmbH
& Co. KGaA. Published 2011 by WILEY-VCH Verlag GmbH & Co.
KGaA.
-
12 2 A Brief Review of General Relativity
2.1Differential Geometry
General relativity is formulated on a four-dimensional manifold
– a four dimen-sional surface on which our physical theory is
described. The manifold of generalrelativity is called spacetime
because three of the dimensions correspond to theobserved three
dimensions of space and the fourth dimension of the manifold
cor-responds to what we perceive as time. The structure of the
manifold can be quitecomplicated in principle, but for our purposes
it is not necessary to consider gen-eral situations.
2.1.1Coordinates and Distances
Like the surface of the Earth, the manifold of spacetime can be
covered with patch-es or charts on which coordinates can be
constructed. The set of overlapping chartsthat covers all of
spacetime is called an atlas. Unlike Newtonian theory, there is
nointrinsically physical set of coordinates or charts. Physical
theory in general rela-tivity is formulated in a covariant way so
that the physical quantities are invariantunder changes of
coordinates.
There is a particularly useful class of coordinate choices are
called normal coordi-nates. Normal coordinates are the closest
things to inertial coordinates in flat-space,and so the reference
frame described by normal coordinates is called a locally iner-tial
frame. Normal coordinates can typically be constructed over a
region with a sizecomparable to the curvature scale of spacetime.
We will use the fact that, becauseof the equivalence principle, we
can always find normal coordinates in the vicinityof any spacetime
point and, in these coordinates, much of our flat-space
intuitionwill hold.
The distance between two points that are sufficiently close
together is a geometricinvariant and so it is the same regardless
of what set of coordinates are adopted. Thetwo points need to be
close together so that there is a unique notion of what path
istaken from one point to the other over which we construct the
distance. Thereforewe write Pythagoras’ formula in its differential
form: consider two points, P and Qthat are infinitesimally close
together. These points are labelled by the coordinatesx αP and
x
αQ respectively, and the infinitesimal coordinate difference
between the
two points is dx α D x αQ � x αP . The squared distance between
the two points, d s2,is computed by
d s2 D gμν(x α)dx μ dx ν , (2.1)where gμν(x α) is the metric
tensor of spacetime, which is a function of spacetimecoordinates x
α . Note that the index α runs over four values in a
four-dimensionalspacetime, and by convention we take values to be
f0, 1, 2, 3g so that x1, x2 and x3are the three spatial coordinates
and x0 is the single time coordinate. The metricdetermines the
distance between any two neighbouring points in spacetime
andtherefore determines all of the geometry of the spacetime.
-
2.1 Differential Geometry 13
In a flat spacetime or Minkowski spacetime, we use the symbol
ηα� for the met-ric. In the standard rectilinear coordinates the
distance between any two points inMinkowski spacetime is
d s2 D ημν dx μ dx ν D �c2d t2Cdx2Cd y 2Cdz2 (rectilinear
coordinates) .(2.2)
A transformation to a new set of coordinates is specified by the
four functionsx 0α(x μ) relating the new primed coordinates with
the original unprimed coordi-nates. Under this transformation,
dx μ D @xμ
@x 0αdx 0α , (2.3)
where x μ(x 0α) is the inverse transformation. Since the squared
distance elementd s2 is invariant under such transformations,
d s2 D gμν dx μ dx ν D gμν @xμ
@x 0α@x ν
@x 0�dx 0α dx 0� D g0α� dx 0α dx 0� , (2.4)
where
g0α� D gμν@x μ
@x 0α@x ν
@x 0�. (2.5)
In fact, any physical quantity does not depend on the choice of
the coordinate sys-tem; the freedom of coordinate redefinition x
0α(x μ) therefore represents the gaugefreedom of our geometric
description of gravity, and coordinate transformations arealso
gauge transformations.
For an infinitesimal coordinate transformation (or infinitesimal
gauge transfor-mations) of the form
x α ! x 0α D x α C α(x μ) , (2.6)where is a displacement vector
we see that
dx α ! dx 0α D dx α C @α
@x μdx μ (2.7)
and therefore
gα� ! g0α� D gα� � gαμ@ μ
@x �� gμ� @
μ
@x αC O( 2) . (2.8)
Example 2.1 Transformation to polar coordinates
Given the two-dimensional flat-space metric in rectilinear
coordinates,
d s2 D gμν dx μ dx ν D dx2 C d y 2 , (2.9)
one can transform into polar coordinates r D (x2 C y 2)1/2 and φ
D arctan(y/x ).The inverse transformation is x D r cos φ and y D r
sin φ so dx D
-
14 2 A Brief Review of General Relativity
cos φdr � r sin φdφ and d y D sin φdr C r cos φdφ and hence
d s2 D dx2 C d y 2 D (cos φdr � r sin φdφ)2 C (sin φdr C r cos
φdφ)2D dr2 C r2dφ2 D g0μν dx 0μ dx 0ν . (2.10)
Therefore we have g0r r(r, φ) D 1, g0φφ(r, φ) D r2, and g0r φ(r,
φ) D g0φ r(r, φ) D 0.
Example 2.2 Volume element
Under the coordinate transformation of Eq. (2.3), the metric
transforms accordingto Eq. (2.5). The metric is a 4 � 4 matrix
whose determinant is related to the volumeelement of spacetime. To
see this, we take the determinant of Eq. (2.5):
det g0 D detˇ̌̌̌
@(x)@(x0)
ˇ̌̌̌2det g , (2.11)
where J D @(x)/@(x0) is the Jacobian matrix J α� D @x α/@x 0� .
Recall that the Jacobiandeterminant arises in a change of variables
in integral calculus: under the coordinatetransformation x ! x0,
the measure changes as
d4x 0 D detˇ̌̌̌@(x0)@(x)
ˇ̌̌̌d4x . (2.12)
Since we can always locally perform a coordinate transformation
to a locally inertialCartesian frame in which the metric is g0α� D
ηα� D diag[�c2, 1, 1, 1], which hasdeterminant det η D �c2, and for
which the volume element is dV D cd4x 0 Dcd t0dx 0d y 0dz0, we see
that
dV D cd4x 0 D c detˇ̌̌̌@(x0)@(x)
ˇ̌̌̌d4x D c
sdet gdet η
d4x
D (� det g)1/2d4x . (2.13)
Therefore j det gj1/2d4x is the volume element at a location in
spacetime.As an example in two dimensions, consider the metric of
two-dimensional flat-
space in polar coordinates that was found in Example 2.1: gα� D
diag[1, r2]. Thevolume element is therefore (det g)1/2d2x D r d r
dφ.
2.1.2Vectors
Geometric constructs such as vectors and tensors need to be
generalized from theirnormal flat-space definition (e.g. a vector
as going from one point in space to an-other) to a generalized
definition that can be ported to curved manifolds.









![Gravitational Wave Astronomy and Astrophysics: Sources of ...2601).pdf · Interferometer Gravitational-wave Observatory (LIGO) [1] in the USA made the first direct detection of gravitational](https://img.pdfslide.us/doc/110x75/5ec93288982cc5439a4c9623/gravitational-wave-astronomy-and-astrophysics-sources-of-2601pdf-interferometer.jpg)