Embed Size (px)
Citation preview
GraspIt!: A Versatile Simulator for Grasp Analysis
Andrew T. Miller PeterK. AllenDepartmentof ComputerScience
ColumbiaUniversityNew York, NY 10027
�
ABSTRACT
We have createda uniquetool for graspsimulation,visualization,andanalysisthatallows a userto createandanalyzegraspsof a given3D objectmodelwith a given articulatedhandmodel. The graspscanbe performedeitherautomatically, wherethesystemclosesthefingersaroundtheobjectatpresetvelocities,or manuallythroughdirectmanip-ulationof thejoints. As collisionsoccurbetweenthelinks of thefingersandtheobject,thesystemlocatesthecontactsandanalyzestheevolvinggraspon thefly. Eachtime thegraspchanges,thesystemupdatestwonumericmeasuresof qualityandrecomputes3D projectionsof thegraspwrenchspacewhich areusefulwhenvisualizinga grasp’s capabilities.We provideexamplesof thesystembeingusedwith four differentartic-ulatedrobotichandmodels,eachgraspingdifferentobjectmodels.Wefeel thesystemis veryusefulfor handdesignerswhoprototypedifferenthandmodelsin simulationanddeterminehow designdecisionsaffect ahand’s graspingability. It is alsousefulfor researchersin graspplan-ning or for simulationandvirtual reality designerswishing to performrealisticgraspingin a virtual setting.
1 INTRODUCTION
Designingan articulatedrobotic handis a difficult taskwith manyconsiderationssuchastaskrequirements,mechanismcomplexity, andphysicalsize and weight. Often a physicalprototypeis necessarytotruly testa hand’s ability to performtasks,but this canbe quitecostlyanddesignchangesarenot easyto make. What is neededis a systemthat would allow a userto load a handdesign,to interactwith it andperform graspsof objects,and to visualizeand evaluatethe spaceofforcesandtorquesthat it canapply.�
This work was supportedin part by an ONR/DARPA MURI awardONR N00014-95-1-0601, DARPA AASERT awardsDAAHO4-93-G-0245andDAAH04-95-1-0492, andNSFgrantsCDA-96-25374andIRI-93-11877.
The increasingpower of thecurrentlyavailabletools for geometricmodelingandcomputationalgeometryhave madesucha systempos-sible. An earlierpaper[12] describedour initial versionof a systemwhich whengiven 3D modelsof a robotichandandanobject,aswellasa usersuppliedhandconfiguration,wouldrunoffline andanalyzethegrasp.Uponcompletionit presentstwo numericmeasuresof thegraspqualityaswell useful3D projectionsof the6D graspwrenchspace.Wehave sincetakenthe coreanalysisroutinesfrom that systemandbuilta real-time,interactive simulatorthatallows theuserto manipulatethehand,performgrasps,andseetheanalysisresultson thefly. Theintentof this paperis to demonstratethe versatility andeffectivenessof ourlatestsystem,which we have dubbed“GraspIt!”, aswell asto describeits softwarecomponents.
This systemallowsusto testa hand’sability to graspdifferentkindsof objects.Thisenablescomparisonof handdesignsto find theonebestsuitedto particularkinds of tasks.Until now, handdesignshave emu-latedthehumanhandbecauseof its provenability to performcomplexgraspingandmanipulationtasks,but a systemwith thesecapabilitieswould bean indispensabletool for designingandtestingalternatepos-sibilities. Anotheruseof this systemis planninggraspingtasksfor anexisting robotic hand. Futurework will allow a userto synthesizelo-cally optimal graspsand will considermoreof the task requirementsandreachabilityconstraints.Finally, GraspIt!caneasilybecomepartofa largersimulationor virtual reality projectwhererealisticgraspingofobjectsis required.
In summarywe feeloursystemhasthefollowing advantages:� We have a largeandgrowing library of handandobjectmodels.� By employinga generalmethodof specifyingkinematicsandge-ometry it hasthe flexibility to allow a wide variety of new handdesigns.� Real-timecollision detectionandgraspevaluationalgorithmsal-low direct interactionwith the handandresultsareproducedonthefly.� Graspscanbeperformedautomatically, saving time over individ-
Hand/Object�
ConstructionUser�
InterfaceContact
DeterminationQuality�
ComputationWrench SpaceVisualization
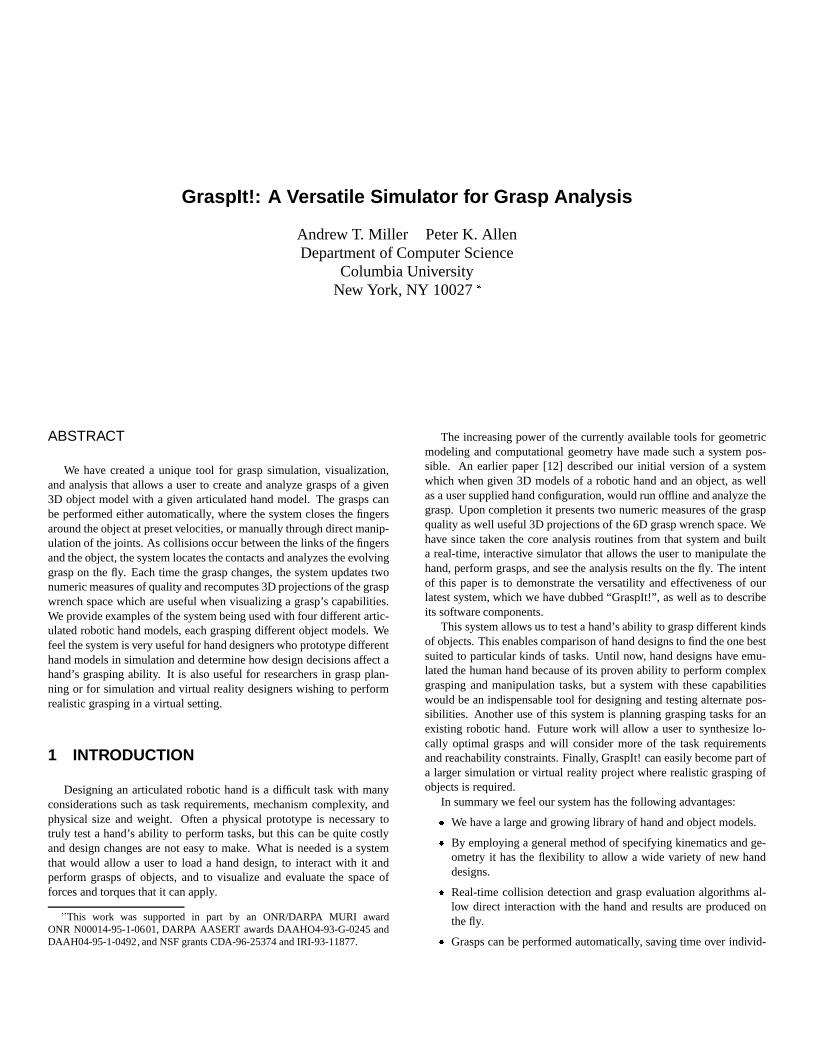
➤ read object model➤ read link models➤ read kinematics➤ assemble hand
➤ view 3D scene➤ change hand pose➤ auto-grip ➤ manually move joints
➤ detect collisions➤ adjust contact to object surface➤ find contact area➤ add friction cone(s)
➤ compute grasp wrench space➤ find min facet distance➤ find hull volume
➤ project facets to force space and to torque space➤ intersect both sets of halfspaces.
GraspIt!
Figure1: Theinternalcomponentsof GraspIt!andtheir functions.
ually manipulatingeachdegreeof freedom.� Novel visualization methodsaid the user in understandingagrasp’sstrongandweakpoints.
Theremainderof this paperis laid out asfollows. Section2 brieflyreviews someof the previous research.Section3 describesthe soft-ware architectureof GraspIt!, and describeshow the variouscompo-nentswork togetherto evaluategrasps.Section4 demonstratesthesys-tem in actionby presentingthe analysisof examplegraspsperformedby a parallel jaw gripperand the Barrett,DLR, andRobonautrobotichands.Finally, Section5 summarizesour contributionsanddetailsourproposedresearchdirections.
2 RELATED WORK
Thereis agreatdealof previousresearchin thefieldof graspanalysisandsynthesis.However, duetospaceconstraintswecanonly highlightafew of themostrelevantpapers.Seereviews by MishraandSilver [13]andby Troccaz[15] for referencesof someof the older work. Salis-bury [17] classifiedtypesof contacts,with andwithoutfriction, betweentwobodiesandprovidedanapproachthataccountsfor uni-sensecontactwrenchesin determiningwhethera graspcompletelyrestrainsanobjectwhich he calls form-closure. Pollard[16] developeda parallelsystemto computehighqualitygraspsusingprototypegraspsasinput,andFis-cherandHirzinger[5] createdasystemthatrepeatedlychooses3 contactpointsonanobjectusingaheuristicandcheckswhetherthesepointscanberealizedby thehand.Recentwork by MaekawaandHollerbach[11]will allow a userto feel the interactionforcesinvolved in graspingormanipulatinganobjectwith theuseof a humanhandmodelanda hap-tic displaydevice.
Given the goal of minimizing the sum magnitudeof the contactforces,Kirkpatrick etal. [7] proposedageneralmeasureof qualityfor an� -contactgrasp,definingit astheradiusof thelargestwrenchspaceballwhichjustfits within theunit graspwrenchspace.FerrariandCanny [4]developedthismeasurefurtherandproposedanothermeasureminimiz-ing the maximumcontactforce. Earlier, Li andSastry[8] notedthatsimilar measuresarenot invariant to the choiceof torqueorigin, andproposedusing the volumeof the graspwrenchspaceas an invariantqualitymeasure.They alsodevelopedaqualitymeasureusingtaskellip-soidsto bettermodelthespaceof wrenchesrequiredfor a task,whereasthepreviousauthorsall assumedthetaskwrenchspaceis unknown andthereforedefinedthespaceasa ball centeredat theorigin of thewrenchspace.Our implementationof thegraspqualitycomputationsis derived
from thethepresentationof the��
unit graspwrenchspaceby FerrariandCanny.
3 THE GRASPING SIMULATOR
While GraspIt! is quiteeasyto use,it relieson severalcomponentsto runsmoothlyandefficiently. Someof theoperationsit mustperforminclude: assemblingthegeometriclink modelsof thechosenhand,lo-catingcontacts,evaluatinggraspquality, andproducingwrenchspaceprojections(seefigure1 for anoverview). We describetheworkingsofeachof thesepiecesin thefollowing sections.
3.1 Hand Construction
We havedesignedthesimulatorto beasgeneralaspossiblesothatitis usefulfor a varietyof handsandobjects.However, it wasnecessaryto createstandardformatsfor thedefinitionsof a handandanobject,sothatthey canbeunderstoodby thesystem.An objectconfigurationfileis fairly simple,andconsistsonly of a pointerto a CAD modelfile anda materialspecification.Currentlythesurfaceof theobjectis assumedto becomposedentirelyof onetypeof materialto easethestaticfrictioncomputations.
Our handdescriptionfile similarly allows us to describethe linkgeometriesas complete3D entities,eachwith an associatedmaterialspecification.Furthermore,it fully describesthekinematicsof thehandusingstandardDenavit-Hartenberg parameterswith additionalinforma-tion regardingjoint limits andfingerbasetransforms.Eachjoint, whichis eitherrevolute or prismatic,hasits freeparameterconnectedto oneof the hand’s degreeof freedomvariableseitherdirectly or throughalinear function. This allows for coupledjoints like the passively con-trolled distal joint found in many anthropomorphicfingerdesigns.Wehavefoundourdescriptionmethodis flexible enoughto constructhandsassimpleasaparalleljaw gripperor ascomplicatedasmany of thefullyarticulatedhandsin usetoday.
After readingthe descriptionfile, GraspIt! readseachof the linkmodelfilesandsetstheinitial transformsbasedonthekinematics.Oncethehandconstructionis completed,it turnscontrolover to theuser.
3.2 Collision Detection and Contact Location
Throughoutthe simulationthe object remainsfixed with its centerof gravity on the WCS origin, andthe usercontrolsonly the configu-rationof thehand.Thehandcanbetranslatedin threedimensionsand

rotatedin threedimensionsaboutany arbitrarypoint. In addition, theusercanindividually manipulateeachof thehand’s internaldegreesoffreedomor startanauto-graspwhereseveraljointsclosesimultaneouslyatvelocitiesspecifiedin thehanddescriptionfile.
Theauto-graspis a new featurein our systemthatallows theoper-ator to quickly form a graspat the touchof a key, makingthe manualpositioningof thelinks a lesstimeconsumingprocessrequiredonly forsmall refinementsof the initial grasp.As thegraspcloses,any contactbetweentheobjectanda link causesall of the joints (andtheir relatedDOF)thatarepreviousto thelink in thefingerchainto stop,while jointsfurther in the chaincontinueto closeuntil anothercontactis found orthejoints reachtheir limits.
To detectthesecontactsandprevent the links from passingthroughthe objector eachother, we have incorporatedthe V-Collide collisiondetectionpackage[6]. During initialization, this packagearrangesthetrianglesthat makeup eachdistinctobjectinto a hierarchyof orientedboundingboxes. A fast recursive algorithmdescendsthesehierarchiesandcandeterminein realtime if two objectsarecolliding. We modifiedthealgorithmsothat in theevent that two trianglesarecolliding, it de-termineswhetherall theverticesof the triangleshave moved lessthansomesmallepsilon.Usingthisasastoppingcondition,weimplementeda binarysearchto refinethehandDOF parametersuntil thelink is sep-aratedfrom theobjectby a distancelessthanthetoleranceof thesolidmodeler(currentlysetto ��� �� mm).
At this point GraspIt! calls theACIS solid modelingengineto per-form anintersectionbetweenthelink andtheobjectresultingin a com-monsurfacepatch.If thepatchconsistsonly of apoint, thenweclassifyit asa point contact. If the patchhastwo verticesthenthe contactisclassifiedasa line contact,andfor a patchwith greaterthantwo ver-tices,we considerit a planecontact.Nguyen[14] pointsout that thesecomplex contacts(linear andplanar)canbe representedastheconvexsumof properpointcontactsateachof theverticesof thesurfacepatch.
To find thespaceof forcesthat may be appliedat a particularcon-tact,wefirst find thelocalcontactnormalwhich is definedastheinwardpointing normalof the tangentplaneof the contact. If a contacttan-gentplanecannotbe defined,thecontactis consideredunstableandisdisregardedfor the remainderof theprocess.If we assumea Coulombfriction model,thenthe total force, � , actingon theobjectat a contactpoint must lie within a conethat hasan apex at the contactpoint, anaxisalongthecontactnormal,anda half angleof ����� ��� � , where
� �is thecoefficientof staticfriction. In orderto find thetotalgraspwrenchspacewhenwe computethe graspquality, we will needa finite basissetof vectors,soit is necessaryto approximatethis conewith a properpyramid(seefigure 2). The coefficient
� � is definedbetweenpairsofmaterialsandcanonly be foundempirically. However, sinceit canbedifferentfor eachpairof materials,we haveallowedthematerialsof thelinks andobject to be individually specified,thus increasingthe flex-ibility and realismof the system. Table 1 is a matrix containingthecoefficientswe have assumedfor thematerialscurrentlydefinedin oursimulation.Thesevalueswereobtainedfrom therangesprovidedin theCRCHandbookof ChemistryandPhysics[9].
Eachtime acontactoccurswefollow thisprocedure,andif thereareat leastthreepoint contacts,GraspIt!computesthegraspquality.
������ "!$#&% �
% ('*)�+-, � "!$# % /.10f3f
28 f1 f
22
f27
tan3
µ-1
ff2
Figure2: Wehaveapproximatedthefriction conewith an8 sidedpyra-mid. Thecontactforce, � , is representedasa convex combinationof 8forcevectorsaroundtheboundaryof thecone.
material metal glass plastic wood rubber
metal 0.2 0.2 0.2 0.3 1.0glass 0.2 0.2 0.2 0.3 1.0
plastic 0.2 0.2 0.3 0.4 1.0wood 0.3 0.3 0.4 0.4 1.0rubber 1.0 1.0 1.0 1.0 2.0
Table1: The valuesof thecoefficient of friction for materialsdefinedwithin GraspIt!.
3.3 Computing Grasp Quality
First, thesystemmustanalyzeeachcontactanddetermineits contri-bution to theoverall stability of thegrasp.Thenwe computea convexhull of thecontactwrenchesto determinetheoverall spaceof wrenchesthat canbeappliedby this grasp.Using thehull, thesystemcancom-putetwo commonlyusedmeasuresof graspquality. Althoughwe onlypresenta summaryof thesesteps,a more in depthdescriptioncanbefoundin ourearlierwork [12].
Using the object’s centerof gravity asreferencepoint, we startbyfinding the6D-wrenchthatis associatedwith eachforceactingatacon-tact point. Thenwe must computethe unit graspwrenchspace,andFerrari andCanny [4] describetwo differentmethods.Onelimits themaximummagnitudeof the contactnormal forcesto 1, and the otherlimits their summagnitudeto 1. We have implementedthesecondop-tion due to its easeof computation. Under this constraint,the setofwrenchesthatcanbeexertedon theobjectis:46587:9<;>=�?A@CBED<FGFIHKJLMON ��PRQ MTS �CU�V�V�V�U Q MGS WKXCY (1)
If this convex hull containsthe wrenchspaceorigin thenthe graspis stable.Onequality measurethat is oftenproposedis theradius,Z , ofthe largest6D ball, centeredat theorigin, thatcanbeenclosedwith thehull. The vector from the wrenchspaceorigin to the point wheretheball contactstheboundaryof thehull is thesmallestmaximumwrenchthatcanbeappliedby thegrasp.In this worstcasethesummagnitudeof thecontactwrencheswould have to be
� [timesthemagnitudeof the
disturbancewrench.Thecloser Z is to 1 themoreefficient thegraspis.However, this measureis not invariantto thechoiceof torqueorigin asLi andSastrypoint out, sothevolume \ of theconvex hull canbeusedasaninvariantaveragecasequalitymeasurefor thegrasp.
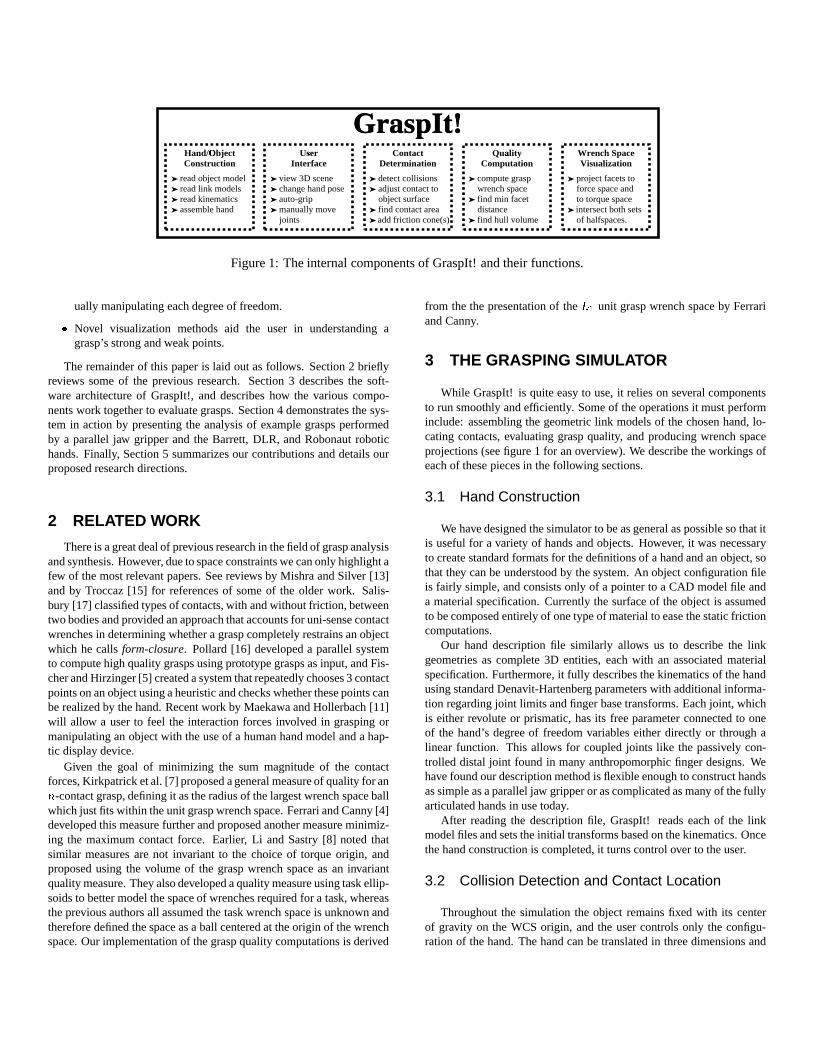
Figure3: Left: Translatingtheparalleljaw gripperinto positionover thephonehandset.Right: A completedstablegraspof thephone.
We have implementedthis portion of the analysiswith the Qhullprogram[2]. It producesa list of facetsof the convex hull, andeachis describedby a normal vector and a signedoffset from the origin.This makesit easyto determinewhethertheorigin is containedin thehull, indicatinga stablegrasp,andwhich facetis closestto theorigin,indicatingthemostdifficult wrenchfor thegraspto apply. Clearly, thewrenchin theoppositedirectionis themostdifficult externalwrenchforthegraspto resist. The minimum offsetvaluegivesus Z andindicateshow efficient thegraspis at handlingthis worstcase.Qhull canalsobequeriedfor thevolumeof thecomputedhull whichgivesus \ .3.4 Wrench Space Visualization
One reason3D examplesareavoided in previous papersis due tothedifficulty of visualizingthe results.A 2D planarobjectwill have a3D wrenchspace,but a 3D objectwill have a 6D wrenchspace,andtodisplayit, wemustprojectit into 3D spaceby fixing threeof thewrenchcoordinates.Wehavechosenfour projectionsof thegraspwrenchspacethat canhelp us understandsomeof the characteristicsof a particulargrasp. If we fix the torquecoordinatesof the wrenchspaceto 0, theresultingprojectionshowsthespaceof forcesthatcanbeappliedby thegraspwithout imparting a net torqueto it, and likewise, if we fix theforcecoordinatesto 0, we canvisualizethespaceof torquesthatcanbeappliedto theobjectwithout a net forceactingon thebody. By settingthe torquecoordinatesto their valuesat thepoint on thehull boundarythatisclosestto theorigin, Q^]W_M J , wecandisplaythespaceof forcesthatcanbe appliedif the worst casetorqueneedsto be applied. Similarlywe candisplaythespaceof torquesthatcanbeappliedif theworstcaseforce, Qa`W_M J , mustbeapplied.In general,westartwith thecollectionof6D halfspaces,b J>ced�fhgji , but oncewe have chosenvaluesfor threecoordinatesof f , wearrive atanew setof 3D halfspaces,bakJ>c � flgmi k .FromthereweuseQhull againto computetheir intersectionwhichgivesusthehull bodiesthatarepresentedin thenext section.
4 EXAMPLES
In this section,we presentexamplesof different graspsof variousobjectsperformedusing modelsof a parallel jaw gripperand two ar-ticulatedrobotic hands. Eachsectionbegins with a descriptionof thehandusedandcontinueswith a demonstrationof theprocessdescribedin theprevioussection.Theseexamplesareintendedto demonstratetheversatilityof thesystemandits effectivenessasa tool for visualizingagrasp’sstrengthsandweaknesses.
4.1 A Parallel-Jaw Gripper
Ourgrippermodelhastheapproximatedimensionsof anactualLordgripper. For easeof use,we changedthe kinematicsof our grippersothateachplatecanbeindependentlycontrolled.Whenonly onecoupledDOF is usedto grip a non-moving object,thegrippermustbecenteredover theobjectexactly for both platesto comein contact.Besidesthekinematics,we alsospecifiedthesurfacematerialof thepalmasmetalandtheplatesasrubber.
Figure3 shows two screenshotsfrom GraspIt!. The first shotis aportion of the main window which containsour model of the gripperanda model of a telephonehandsetwith a coordinateframe attachedto its centerof gravity. Theuseris translatingthegripperto a positionabove thephone’scenterat which point thegrippercanbeloweredandits platesclosed.Sincethereis no contactbetweenthegripperandtheobject, the graspis still unstable,and that is indicatedin the qualityreadoutat thebottomof thewindow. Thesecondshot,this time of thefull-screen,shows that when the jaws areclosed,the result is a stablegrasp,andthetwo sidewindows displayselected3D projectionsof thecomputedgraspwrenchspace.Currently, the top sidewindow showsthe 3D spaceof forcesthat can be applied to the phonewith no nettorque,andthebottomsidewindow showsthespaceof torquesthatcanbe appliedwith no net force,althoughtheseprojectionchoicescanbe

Figure4: Left: TheBarretthandhasbeentranslateduntil thepalmcontactedthemugsurface.Right: A completedstablegraspof themug.
changed.Theredcones1 seenontheinsidesurfaceof thephonearethefriction conesplacedat the verticesof the contactregions. Finally, inadditionto thecoordinateaxespresentbefore,two new indicatorshaveappearedin the main window. They show the directionsof the force-torquecombinationthat is mostdifficult for this graspto resist,in thiscasea twist parallel to the jaw axis anda simultaneousforce pushingtangentiallyalongthe the plates. This sort of disturbancewrenchcanonly be resistedwith the frictional forcessincethereare no contactsnormalto thetwist axisandno contactsopposingtheforcevector.
4.2 The Barrett Hand
Thedextrousrobothandusedin thisexampleis theBarrettHand[1].It is aneight-axis,three-fingeredmechanicalhandwith eachfingerhav-ing two joints. Onefinger is stationaryand the other two canspreadsynchronouslyup to 180degreesaboutthepalm(finger3 is stationaryandfingers1 and2 rotateaboutthepalm).Althoughthereareeightaxes,thehandis controlledby four motors.Eachof thethreefingershasoneactuatedproximal link, anda coupleddistal link that movesat a fixedratewith theproximallink. A novel clutchmechanismallows thedistallink to continueto move if theproximal link’s motionis obstructed(re-ferredto asbreakaway). An additionalmotorcontrolsthesynchronousspreadof thetwo fingersaboutthepalm.
The Barretthandhas10 degreesof freedom:6 for the poseof thewrist, 1 for thespreadangleof thefingers,and3 for theanglesof theproximal links. Our currentmodelof thehandusesslightly simplifiedlink geometries,but thekinematicsof themodelmatchtherealhandex-actly. Becausetheactualhandin our lab is outfittedwith tactilesensorson the innerpadof eachlink, including thepalm,we have setthe linkmaterialof eachlink in themodelto rubber. Ourobjectto begraspedisa mug,andwe have setthematerialasglassin theobjectconfigurationfile.
1A color versionof thispaperis availableathttp://www.cs.columbia.edu/˜amiller
We beganthis graspby translatingthehanduntil theflat palmcon-tactedthe roundedouter surfaceof the mug. At this point we haveGraspIt! performanauto-graspwherethethreefingermotorshave thesamerelative velocity and the spreadmotor hasits velocity set to 0.Eachfingerhasa contacton its innerlink which resultsin theouterlinkbreakingaway andcontinuingto closeuntil anothercontactoccursatthe finger endpoints.The resultingwrappinggraspis very stabledueto thenumberof highly frictional contactsspreadout aroundthemug’scenterof gravity (figure4).
4.3 The DLR Hand
The DLR hand[3], developedat the GermanAerospaceCenter, isa four-fingeredarticulatedrobotichand,andit hasananthropomorphicdesign.The fingersareidentical,andeachconsistsof threelinks withtwo jointsat thebase,onejoint betweentheproximalandmediallinks,and one joint betweenthe medial and distal links. This last joint iscoupledin a fixedratio to theprevious joint in thechainjust asit is inthehumanhand.TheDLR handhasa total of 18 degreesof freedom:6specifytheposeof thewrist, andthereare3 independentlycontrollablejoints in eachof the4 fingers.In thedescriptionfile for theDLR hand,we specify its kinematics,including joint limits, andits link materials(metalfor thepalm,proximal,andmediallinks, rubberfor distal links).Also specifiedarethe link models,which areaccuratereplicasof theactualhand,exceptwe have omittedunnecessary detailsat the joints.Theobjectto begraspedin this exampleis a glassErlenmeyerflask.
Translatingthehandtowardstheflaskresultsin only onepoint con-tact on the palm, but by rotatingaroundthat contactpoint, asseenintheleft portionof figure5, anothercontactwill occur. After performingan auto-graspwherethe motor velocitiesaresetso the fingerscurl atequalspeeds,the resultis a somewhatweakbut stablegraspshown intheright portionof thatfigure.However, by manuallyadjustingthefin-ger joints so thatcontactsoccuron theproximalfingerlinks andsothethumbcontactsthebottomsurfaceof theflask,we have founda higherqualitygrasp(figure6).

Figure5: Left: TheDLR handbeingrotatedabouta contactpoint until thesecondpoint of contactbetweenthepalmandflaskoccurs.Right: Aftertheauto-grasphasfinishedtheresultis a stablegraspof theflask.
Figure6: AdjustingtheDOFmanuallycanimprove upontheauto-grasp.Notetheproximallinks of thefingersarenow in contactwith theflask.

Figure7: TheRobonauthandmodel.
4.4 The Robonaut Hand
The final handwe examinedwasthe RobonauthanddevelopedatNASA’s JohnsonSpaceCenter[10]. It is the most anthropomorphicandcomplex of thehanddesignswith 5 fingersand14 internaldegreesof freedom(seefigure 7). The index and middle fingersalong withthethumbareconsideredtheprimarymanipulationfingersandarecap-bableof abductionandadduction.Thering andpinkie aremountedonsqueezingpalm joint which makethemgoodgraspingfingerscapableof wrappingarounda tool or otherobject. Althoughthe link geometryonly specifiesthemetalstructureof thehand,we assumedrubbercon-tactsurfacesto facilitatestrongergrasps.In this example,we chosetheratherdifficult starmodelto seeif thehand’s many degreesof freedomcouldallow it to graspthestarstably.
After moving thepalm into contactwith the top surfaceof thestar,we rotatedthetwo primaryfingersto the left away from thesecondarygraspingfingers. This pregraspshapeis shown on the left sideof fig-ure8. Thenweperformedanauto-graspwhichclosedthefingersaroundthesidesof thestar. A small bit of adjustmentwasnecessaryto bringtwoof thefingertipsin contactwith thebottomsurfaceof thestar. Whilewewereableto performarelatively stablegraspof thestar, wenotethatthegraspis still weakat resistingforcespushingaway from the palm.Thisobjectmodelmaybeat thelargeendof therangeof whatthishandcangraspgivenits kinematicstructure.Furtherresearchwill determinethesizeandshapesof objectsthatareeasiestfor this handto grasp.
5 CONCLUSION AND FUTURE WORK
We have demonstrateda systemthat,givenmodelsof a handandanobject,allows a userto manipulatethe handto performgraspsof theobjectwhich thesystemanalyzes.Thereal-timeanalysisresultsin twonumericmeasuresof graspquality aswell asindicatorsof the grasp’s
weakpoint,andapartialvisualizationof thespaceof forcesandtorquesthat canbe appliedby thegrasp. The systemhasbeendesignedto beflexible soit is easyto addin new handor objectmodels,andthankstothefastcollision detectionalgorithm,we areableto analyzehow com-plex modelsinteractwith real link geometries,ratherthan restrictingourselvesto contactson theendsof roundedfingertips.
Futurework will includeaddingmorequality measuresto the sim-ulator, including a measureof a grasp’s manipulability, and addingavariety of handandobjectmodels. Sucha graspinglibrary will allowus to performmany comparative testsandhelp answerthequestionofhow the kinematicand geometricdesignof a handaffects graspsta-bility and graspmanipulability. We are also interestedin the areaofgraspsynthesis,andwhile thetotal spaceof handconfigurationsis pro-hibitively large,we hopeto useheuristicsandalimited numberof handpreshapesto limit thetotal spacewe actuallylook at. We would like tohave GraspIt! at leastlocally optimizea graspperformedby theuser.Finally, we would like to adda workspaceandanarmattachmentsowecanconsiderreachabilityconstraintsandpossiblytestthesegraspswitha realhand.
Acknowledgment: Wewouldlike to thankProfessorGerdHirzingerand Dr. Max Fischerfrom the GermanAerospaceCenter(DLR) forproviding us with modelsof their robotic hand. We would also liketo thankDr. Myron Diftler of NASA’s JohnsonSpaceCenterfor theRobonauthandmodel.
References
[1] P. K. Allen, A. T. Miller, P. Y. Oh,andB. S. Leibowitz. Using tactileandvisualsensingwith a robotichand.In Proc. of the 1997 IEEE Int. Conf. onRobotics and Automation, April 1997.
[2] C. B. Barber, D. P. Dobkin, andH. Huhdanpaa.The Quickhull algorithmfor convexhulls. ACM Transactions on Mathematical Software, 22(4):469–483,December1996.
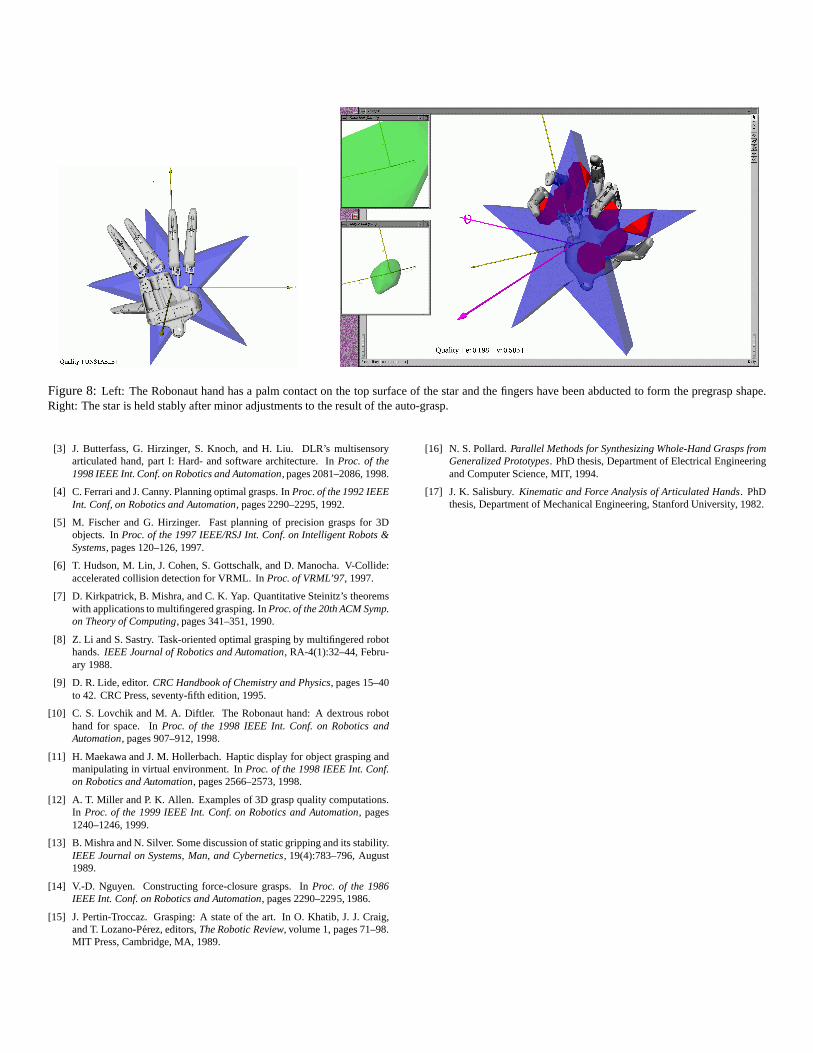
Figure8: Left: TheRobonauthandhasa palmcontacton the top surfaceof thestarandthefingershave beenabductedto form thepregraspshape.Right: Thestaris heldstablyafterminor adjustmentsto theresultof theauto-grasp.
[3] J. Butterfass,G. Hirzinger, S. Knoch, andH. Liu. DLR’s multisensoryarticulatedhand,part I: Hard- andsoftwarearchitecture. In Proc. of the1998 IEEE Int. Conf. on Robotics and Automation, pages2081–2086,1998.
[4] C.FerrariandJ.Canny. Planningoptimalgrasps.In Proc. of the 1992 IEEEInt. Conf, on Robotics and Automation, pages2290–2295,1992.
[5] M. Fischerand G. Hirzinger. Fastplanningof precisiongraspsfor 3Dobjects. In Proc. of the 1997 IEEE/RSJ Int. Conf. on Intelligent Robots &Systems, pages120–126,1997.
[6] T. Hudson,M. Lin, J. Cohen,S. Gottschalk,andD. Manocha.V-Collide:acceleratedcollisiondetectionfor VRML. In Proc. of VRML’97, 1997.
[7] D. Kirkpatrick, B. Mishra,andC. K. Yap. QuantitativeSteinitz’s theoremswith applicationsto multifingeredgrasping.In Proc. of the 20th ACM Symp.on Theory of Computing, pages341–351,1990.
[8] Z. Li andS.Sastry. Task-orientedoptimalgraspingby multifingeredrobothands.IEEE Journal of Robotics and Automation, RA-4(1):32–44,Febru-ary 1988.
[9] D. R. Lide, editor. CRC Handbook of Chemistry and Physics, pages15–40to 42. CRCPress,seventy-fifthedition,1995.
[10] C. S. Lovchik andM. A. Diftler. The Robonauthand: A dextrousrobothand for space. In Proc. of the 1998 IEEE Int. Conf. on Robotics andAutomation, pages907–912,1998.
[11] H. MaekawaandJ.M. Hollerbach.Hapticdisplayfor objectgraspingandmanipulatingin virtual environment. In Proc. of the 1998 IEEE Int. Conf.on Robotics and Automation, pages2566–2573,1998.
[12] A. T. Miller andP. K. Allen. Examplesof 3D graspquality computations.In Proc. of the 1999 IEEE Int. Conf. on Robotics and Automation, pages1240–1246,1999.
[13] B. MishraandN. Silver. Somediscussionof staticgrippingandits stability.IEEE Journal on Systems, Man, and Cybernetics, 19(4):783–796,August1989.
[14] V.-D. Nguyen. Constructingforce-closuregrasps. In Proc. of the 1986IEEE Int. Conf. on Robotics and Automation, pages2290–2295,1986.
[15] J. Pertin-Troccaz. Grasping:A stateof the art. In O. Khatib, J. J. Craig,andT. Lozano-Perez,editors,The Robotic Review, volume1, pages71–98.MIT Press,Cambridge,MA, 1989.
[16] N. S.Pollard.Parallel Methods for Synthesizing Whole-Hand Grasps fromGeneralized Prototypes. PhDthesis,Departmentof ElectricalEngineeringandComputerScience,MIT, 1994.
[17] J. K. Salisbury. Kinematic and Force Analysis of Articulated Hands. PhDthesis,Departmentof MechanicalEngineering,StanfordUniversity, 1982.







![Adversarial Grasp Objects - Ken Goldberg...Examples include GraspIt! [16], OpenGRASP [17], and the Dexterity Network (Dex-Net) 1.0 [11]. To satisfy the as-sumption of known state,](https://img.pdfslide.us/doc/110x75/5f1ed00ee73d0329b36351d4/adversarial-grasp-objects-ken-goldberg-examples-include-graspit-16-opengrasp.jpg)