Embed Size (px)
Citation preview

IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 7, NO. 3, JULY 2010 535
GRANMA: Gradient Angle Model Algorithm onWideband EMI Data for Land-Mine DetectionGanesan Ramachandran, Paul D. Gader, Senior Member, IEEE, and Joseph N. Wilson, Member, IEEE
Abstract—This letter presents a simple and fast algorithm toanalyze wideband electromagnetic induction data for subsurfacetargets. A well-known four-parameter model is differentiated,resulting in a two-parameter model. A fast lookup table is usedto find parameters as opposed to nonlinear optimization. Theproposed approach provides a computationally faster way to re-produce the results of state-of-the-art methods. A detailed mathe-matical analysis of the model is given that describes the advantagesand limitations of the proposed method.
Index Terms—Argand diagram, Bell–Miller model, Cole–Colemodel, electromagnetic induction (EMI), land-mine detection.
I. INTRODUCTION
W IDEBAND electromagnetic induction (WEMI) is awidely investigated method for detecting land mines.
A typical sensor has a transmit coil that generates a primaryelectromagnetic field. It has one or more receive coils thatmeasure the induced fields caused by the interactions of theprimary field with the surrounding material.
There have been many attempts in the past to model theinduced fields measured by a WEMI sensor. Miller et al. [1]developed one of the most successful mathematical models tomodel unexploded ordnance. Recent studies [2], [3] have shownthat these models can also characterize land-mine responses.
This letter describes a gradient approach that can efficientlyestimate the parameters in a sequential manner. The first stepin the sequence involves finding two parameters using a lookuptable. The remaining two parameters can then be estimated bysolving a linear least squares (LS) problem.
II. MODELING DIPOLE RESPONSE
A. Signal Models
Miller et al. [1] proposed parametric models for WEMI data.The four-parameter model is explored here. Let I and Q repre-sent the in-phase (real-part) and quadrature-phase (imaginary-part) components of the WEMI response, respectively, and let
Manuscript received June 4, 2009; revised July 23, 2009. Date of publicationMarch 15, 2010; date of current version April 29, 2010. This work wassupported by Army Research Office under Grant W911NF0510067.
G. Ramachandran is with the Department of Electrical and ComputerEngineering, University of Florida, Gainesville, FL 32611 USA (e-mail:[email protected]).
P. D. Gader and J. N. Wilson are with the Department of Computer andInformation Science and Engineering, University of Florida, Gainesville,FL 32611 USA (e-mail: [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/LGRS.2010.2041184
ω denote the frequency. The four-parameter Bell–Miller modelfor WEMI data Z is given by
Z(ω) = (I(ω) + iQ(ω))p4= A
(s +
(iωτ)c − 2(iωτ)c + 1
)(1)
where A, s, τ , and c denote the amplitude, shift in the real part,time constant, and width in the imaginary part, respectively.Their ranges are given by A, s ε � and τ , c ε �+.
B. Existing Methods for Parameter Estimation
With minor modification, the four-parameter Bell–Millermodel in (1) can be shown to be equivalent to the Cole–Colemodel [2]. Denoting the WEMI response at infinite and zerofrequencies, respectively, as Z∞ and Z0, the amplitude and shiftcan be shown to be
A =Z∞ − Z0
3s =
2Z∞ + Z0
Z∞ − Z0. (2)
Substituting for A and s yields
Z(ω) = Z∞ +Z0 − Z∞
1 + (iωτ)c≡ Cole−Cole. (3)
While there have been many attempts to estimate the Cole–Cole model parameters, most of them are iterative methodsbased on LS approximation or Bayesian modeling [4]. Thesemethods are too computationally intensive to be practical inland-mine detection.
Pelton et al. [5] formulated the Cole–Cole model in terms ofinduced-polarization parameters in the form of
Z(ω) = Z0
[1 − m
(1 − 1
1 + (iωτ)c
)], m = 1 − Z∞
Z0.
(4)
Xiang et al. [6] use direct inversion to estimate the param-eters of the Pelton model, which is more computationally effi-cient than the Bayesian or LS methods. However, their methodrequires m, c ∈ [0, 1], which fails to model certain mines andleads to poor performance, as shown in Section V-C.
C. Gradient Angle Model
While the model specified in (1) has been used success-fully [3] to model metallic objects, estimating the parame-ters requires nonlinear optimization methods. However, thedependence on amplitude and shift can be removed by usingderivatives [7], so A and s can be eliminated by applying thegradient angle approach to the parametric models.
1545-598X/$26.00 © 2010 IEEE

536 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 7, NO. 3, JULY 2010
Separating the I(ω) and Q(ω) components using Mathemat-ica (verified numerically and by the MATLAB Symbolic MathToolbox), the four-parameter model becomes
I(ω) =A
(s + 1 − 3
(1 + (ωτ)c cos
(cπ2
))1 + (ωτ)2c + 2(ωτ)c cos
(cπ2
))
(5)
Q(ω) =A
(3(ωτ)c sin
(cπ2
)1 + (ωτ)2c + 2(ωτ)c cos
(cπ2
))
. (6)
We define the angle function by
m(ω) = atan2(
∂Q
∂ω,∂I
∂ω
). (7)
We use the MATLAB definition of atan2. The equation for thegradient angle for the four-parameter model (for A > 0) is
m(ω) = −2 tan−1
(−1 + (ωτ)c
1 + (ωτ)ctan
(cπ
4
)). (8)
The range of m(ω) is given by its value at the extrema of ωτ
m(ω)|ωτ=0 =cπ
2m(ω)|ωτ=∞ = −cπ
2.
These equations show that the gradient angle varies betweencπ/2 and −cπ/2, which is adequate to model all angles whenthe value of c ∈ [0, 2]. They also show that the three-parametermodel developed in [1], where c is restricted to be equal to 0.5,can only characterize angles between −π/4 and π/4. From ourdata, we found it to be inadequate to model most land mines.
Because (8) involves only two variables, a lookup table wascreated for m(ω) for a range of values of τ and c. The values ofτ and c were found by matching m(ω) [numerically computedusing (7)] with the m(ω, c, τ) table values for the least meanabsolute error
E(c, τ) =∑ω
|m(ω) − m(ω, c, τ)| . (9)
Lookup table error EL is defined as follows:
EL = E(c, τ), where c, τ =arg minc,τ
(E(c, τ)
). (10)
Amplitude A was found by substituting the estimates τ andc in (6) and finding an LS estimate
A =
Nf∑k=1
Q(ωk)
Nf∑k=1
[3(ωk τ)c sin( cπ
2 )1+(ωk τ)2c+2(ωk τ)c cos( cπ
2 )
] (11)
where τ and c are lookup table estimates, and Nf is the numberof measured frequencies (Table I).
Finally, shift s was found by substituting the estimates of A,τ , and c in (5)
s =1
Nf
Nf∑k=1
(I(ωk)
A− 1 − 3
(1+(ωk τ)c cos
(cπ2
))1+(ωk τ)2c+2(ωk τ)c cos
(cπ2
))
.
(12)
TABLE ILIST OF FREQUENCIES (IN HERTZ)
Fig. 1. m versus ωτ and c. It shows a discontinuity in m when c = 2 andωτ = 1.
The goodness of fit for this method can be measured as thenormalized error between the actual data and the fit
EF =
Nf∑k=1
∣∣∣Z(ωk) − A(s + (jωk τ)c−2
(jωk τ)c+1
)∣∣∣2Nf∑k=1
|Z(ωk)|2. (13)
D. Stability of the Lookup Table Method
All the parameter estimates depend on the accuracy of thegradient and on the accuracy of the lookup table estimates ofτ and c. First, it is necessary to see how a small error in theparameter estimate in the (τ, c) space due to the finite size ofthe lookup table affects the angle estimate. Fig. 1 shows thedependence of m on τ and c. It shows two regions of interest,namely, one being c = 0, and another being c = 2. Fig. 2 showsthat near regions where ωτ = 1, there is a large change in m forsmall changes in τ and c due to the fact that the argument in theright-hand side of (8) becomes zero. The stability analysis isdone by studying the effect of perturbation on τ and c.
Next, it is necessary to analyze the robustness of the es-timated parameters with respect to noise in the data and inthe gradient estimates. Because the noise in the parameters isnonlinearly linked to the noise in the data, it is difficult to deriveexpressions linking the noise in them. Therefore, the stability ofthe method with respect to the noise in the data will be analyzedin the context of classifier design.
III. DATA SETS
The experiments were performed on two data sets. The firstcontained 62 different types of objects, including 26 differenttypes of mines collected over 11 adjoining lanes divided into220 grid cells. The second contained 24 different types ofobjects, including 12 different types of mines collected over

RAMACHANDRAN et al.: GRANMA: GRADIENT ANGLE MODEL ALGORITHM 537
Fig. 2. ∂m/∂τ and ∂m/∂c of the proposed model, computed numerically,shown at 330 Hz. It shows the pattern that near to regions where ωτ = 1and 1 < c < 2, there is a big difference in the angles for a small changein τ or c.
TABLE IINOMENCLATURE AND PROPORTION
12 adjoining lanes divided into 225 cells. Table II shows thedistribution of different types of objects in the data. The datawere collected in two opposite directions over the same set ofgrid locations. The object was assumed to be at the center of thegrid cell; position errors were fixed manually.
The data collection setup consisted of a single dipole trans-mitter and an array of quadrupole receivers [8], [9]. Thedata were collected over 21 frequencies starting from 330 to90 030 Hz spaced in log scale.
In the first data set, each grid cell was of dimensions 1.5 m ×1.5 m, and in the second one, they were 1 m × 1 m. The WEMIsensor collected complex responses in 21 frequencies at 1-cmintervals in three channels. This resulted in a 21 × 3 × 150 or21 × 3 × 100 complex data matrix for each cell. As candidatefor the analysis, only one data vector was extracted from themiddle channel at the center of the cell.
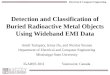
Fig. 3. Histogram of burial depths in the data set.
Fig. 4. Relationship between τ , c, and EL for different mine types.
Fig. 5. τ and c for different object types.
This made the first data set of size 220 grid cells ×2 directions and the second data set of size 225 × 2.
Fig. 3 shows the histogram of burial depths of differenttargets in the combined data set. Most antipersonnel mines wereburied from 0 to 7 cm, and antitank mines were buried from2.5 to 12.5 cm.
The lookup table estimates of τ and c for these data setsare shown in Fig. 5. Fig. 1 and Section II-D show that theerror surface and the update gradients are highly nonlinear,particularly near regions where ωτ = 1 and c ≈ 2. However,Fig. 4 shows that searching for c between 0.1 and 1.4 (in linearscale) and for τ between 10−6 and 1 (in log scale) is sufficient.

538 IEEE GEOSCIENCE AND REMOTE SENSING LETTERS, VOL. 7, NO. 3, JULY 2010
Fig. 6. Effect of τ and c on the signal shape in the Argand diagram. The blue markers show the 21 frequencies, and the green and red asterisks indicate 330 and90 030 Hz, respectively.
This justifies the choice of using a lookup table method. Futureresearch is targeted toward using alternative methods to alookup table, such as regression and direct inversion.
The features are log10(A), s, log10(τ), c, log10(EL), andEF , making a feature set of size 220 × 2 for the first data setand of size 225 × 2 for the second data set
Feature vector
F =
[log10(τ)
τmax
c
cmax
log10(EL)Emax
log10(A)Amax
s
smaxEF
](14)
where Amax, smax, τmax, cmax, and Emax are the scalingparameters.
Fig. 5 shows that different object types form their individualclusters in the (c, τ) space, but nonmetallic clutter (NMC) isspread all over. It is because there is no specific region in thelookup table that matches with NMC.
Fig. 6 shows the effect of varying τ and c on the shape ofthe Argand diagram. The real part or the in-phase componentis plotted on the x-axis against the imaginary part or thequadrature-phase component in the y-axis. The blue markersshow the 21 frequencies with green and red asterisks indicating330 and 90 030 Hz, respectively. As τ goes outside a boundaryof values, only part of the shape is visible in the frequencybandwidth of operation. Therefore, the range of τ is limited bythe bandwidth of the sensor.
IV. CLASSIFIER DESIGN
The classification was done using a soft K nearest neighbormethod with K = 7. The value of K was found as the one thatgave minimum variance without sacrificing performance. Theconfidence value for cell i is given by
conf(i) =
K∑j=1
nij
K∑j=1
mij
(15)
TABLE IIICOMPARISON WITH THE FOUR-PARAMETER MODEL
where nij is the distance to the jth nearest nonmine neighbor
and mij is the distance to the jth mine neighbor.
V. EXPERIMENTS AND RESULTS
A. Experiment Setup
A tenfold cross-validation was performed [10], i.e., the datawere split into ten sets, and each set was tested against aclassifier trained on the other nine sets. Care was taken to avoidhaving the same cell represented in both training and test setssimultaneously by splitting the training and test sets based oncell names.
B. Case 1: Comparison With Nonlinear Optimization
In this case, the proposed GRANMA method was matchedagainst the results of the nonlinear optimization method usedby Fails et al. [3] and the direct inversion method proposed byXiang et al. [6]. Because the paper by Fails et al. used onlydata set 1, the comparison was done only on the same data set.Table III shows that the proposed method performed about thesame statistically as compared to the original four-parametermodel while producing a significant gain in speed.
To compare computation speeds, the LS method wascompared against our proposed method on 500 samples ofsynthetic data generated using the Cole–Cole model. Theparameters were extracted using MATLAB’s lsqnonlin for LSand compared against the actual values. For the same estimationerror, the proposed method ran 10–15 times faster than theLS method. The variability arises due to the random nature ofconvergence of the LS method, rendering it unsuitable for real-time applications like land-mine detection.

RAMACHANDRAN et al.: GRANMA: GRADIENT ANGLE MODEL ALGORITHM 539
Fig. 7. Effect of added noise on the WEMI signature of an HMAP mine. Theblue and red dotted lines represent the noise-free and noisy signals, respectively.
Fig. 8. ROC curves for the GRANMA and direct inversion methods atdifferent added noise levels.
C. Case 2: Stability Analysis With Noisy Data
The observed data contained noise due to variation inground response, sensor drift, hardware limitations, andimperfect coupling between the transmitter and receiver. Inthis case, white Gaussian noise was added to the complexWEMI data to represent such a scenario. To avoid low metalsignatures getting drowned in noise, the standard deviationof the noise being added was kept relative to the energy inthe signal. If ρ denotes the noise level and j is
√−1, thenthe noisy version of the signal Z ′(ω) is given by Z ′(ω) =Z(ω) + ρCN(0, σ2), where σ2 = (1/Nf )
∑Nf
k=1 |Z(ωk)|2 andCN(0, σ2) = N(0, σ2) + jN(0, σ2).
The proposed algorithm was compared against the directinversion method by Xiang et al. The noise level was varied as0.01, 0.05, and 0.1 times the average energy in the signal. Thecross-validation experiments, as described in Section V-A, wererepeated five times, and the averaged scores were comparedfor different feature subsets. This made 3 (noise levels) ×5 (epochs) × 63 (feature subset combinations) experimentsfor the GRANMA method and 3 × 5 × 31 experiments for thedirect inversion method. The nonlinear optimization methodwas not included in the comparison because its computationalrequirements are extremely high comparatively.
Fig. 7 shows that ρ = 0.05 was enough to model most ofthe noisy signals encountered in the data. Fig. 8 shows that the
proposed method outperformed the direct inversion method atall noise levels.
VI. CONCLUSION
The algorithm presented here models the WEMI data math-ematically with acceptable accuracy. It is fast and reliable andis able to overcome the typical pitfalls of usual model-basedmethods. The proposed method is able to classify differenttypes of mines well from clutter and also provides insight tothe type of object that we encounter. It can also be modifiedto search for parameters in a local neighborhood in case ofreal-time implementation. This letter is on improving the clas-sifier design and fusion algorithms to be used with ground-penetration radar data. Also, future experiments will involvetesting the robustness of the GRANMA method in the presenceof different noise models.
ACKNOWLEDGMENT
The authors would like to thank R. Harmon of the ArmyResearch Office, R. Weaver, M. Aeillo, and M. Locke ofthe Night Vision and Electronic Sensors Directorate for theirsupport.
REFERENCES
[1] J. T. Miller, T. H. Bell, J. Soukup, and D. Keiswetter, “Simple phe-nomenological models for wideband frequency-domain electromagneticinduction,” IEEE Trans. Geosci. Remote Sens., vol. 39, no. 6, pp. 1294–1298, Jun. 2001.
[2] AMDS Internal Report W. Scott, Broadband Electromagnetic InductionSensor for Detecting Buried Landmines, Jan. 2008.
[3] E. Fails, P. Torrione, W. Scott, and L. Collins, “Performance of a fourparameter model for landmine signatures in frequency domain wide-band electromagnetic induction detection systems,” in Proc. SPIE Detec-tion Remediation Technol. Mines, Mine-Like Targets XII, R. S. Harmon,J. T. Broach, and J. H. Holloway, Jr., Eds., 2007, vol. 6553, p. 655 30D.
[4] A. Ghorbani, C. Camerlynck, N. Florsch, P. Cosenza, and A. Revil,“Bayesian inference of the Cole–Cole parameters from time- andfrequency-domain induced polarization,” Geophys. Prospect., vol. 55,no. 4, pp. 589–605, Jul. 2007.
[5] W. H. Pelton, S. H. Ward, P. G. Hallof, W. R. Sill, and P. H. Nelson,“Mineral discrimination and removal of inductive coupling with multifre-quency IP,” Geophysics, vol. 43, no. 3, pp. 588–609, Apr. 1978.
[6] J. Xiang, N. B. Jones, D. Cheng, and F. S. Schlindwein, “Direct inversionof the apparent complex-resistivity spectrum,” Geophysics, vol. 66, no. 5,pp. 1399–1404, Sep./Oct. 2001.
[7] S. E. Yuksel, G. Ramachandran, P. Gader, J. Wilson, D. Ho, and G. Heo,“Hierarchical methods for landmine detection with wideband electro-magnetic induction and ground penetrating radar multi-sensor systems,”in Proc. IGARSS, Jul. 2008, vol. 2, pp. II-177–II-180.
[8] A. C. Gurbuz, W. R. Scott, Jr., and J. H. McClellan, “Locationestimation using a broadband electromagnetic induction array,” in Proc.SPIE Detection Sens. Mines, Explosive Objects, Obscured Targets XIV ,R. S. Harmon, J. T. Broach, and J. H. Holloway, Jr., Eds., 2009, vol. 7303,pp. 730 30U-1–730 30U-9.
[9] E. Fails, P. Torrione, W. Scott, and L. Collins, “Performance com-parison of frequency domain quadrupole and dipole electromag-netic induction sensors in a landmine detection application,” inProc. SPIE Detection Remediation Technol. Mines, Mine-Like Targets XII,R. S. Harmon, J. T. Broach, and J. H. Holloway, Eds., 2007, vol. 6553,pp. 695 304.1–695 304.11.
[10] R. Kohavi, “A study of cross-validation and bootstrap for accuracy esti-mation and model selection,” in Proc. Int. Joint Conf. Artif. Intell., 1995,pp. 1137–1143.