-
8/16/2019 Gps in Time Domain
1/17
Pergamon
Transp. Res.-C. Vol. 3, No. 4, pp. 193-209, 1995
Copyright (3 1995 Elsevier Science Ltd
Printed in Great Britain. AI1
rights reserved
0968-090X/95 9.50+ 0.00
0968-09OX 95)OOOOG2
GLOBAL POSITIONING SYSTEMS IN THE TIME DOMAIN:
HOW USEFUL A TOOL FOR INTELLIGENT
VEHICLE-HIGHWAY SYSTEMS?
R. ZITO, G. D’ESTE and M. A. P. TAYLOR
Transport Systems Centre, University of South Australia. The
Levels, South Australia 5095,
Australia
Recei ved 31 Januar y 1995)
Abstract --
Much of the research and development work in intelligent
vehicle-highway systems
(IVHS) relies on the availability of methods for locating and
monitoring vehicles (e.g. “probe
vehicles”) in real time across a road network. This paper
considers the use of the global positioning
system (GPS) as one method for obtaining information on the
position, speed and direction of
travel of vehicles. It reports the results of a series of field
studies, in which real-time GPS data were
compared to data collected by an instrumented vehicle, under a
range of physical and traffic
conditions. The field studies and consequent data analysis
provide a picture of the reliability and
usefulness of GPS data for traffic monitoring purposes, and
hence the possibilities for the use of
GPS in IVHS projects. The use of GPS receivers tailored for
mobile applications, and able to
provide direct observations of vehicle speed and travel
direction, coupled with database manage-
ment using geographic information systems (GIS) software, was
found to provide a reliable and
efficient system for vehicle monitoring. Field data collection
under “ideal” GPS conditions indi-
cated that accurate speed and position data were readily
obtained from the GPS. Under less
favourabie conditions (e.g. in downtown networks), data accuracy
decreased but useful infor-
mation could still be obtained. In addition, the conditions and
situations under which GPS data
errors could be expected were noted. The finding that it is
possible to relate standard GPS signal
quality indicators to increased errors in speed and position
provides an enhanced degree of
confidence in the use of the GPS system for real-time traffic
observations.
INTRODUCTION
Much of the research and development work in IVHS relies on the
availability of methods
for locating and monitoring vehicles (e.g. “probe vehicles”) in
real time across a road
network. This paper considers the use of the global positioning
system (GPS) as one
method for obtaining information on the position, speed and
direction of travel of
vehicles. It reports the results of a series of field studies,
in which real-time GPS data were
compared to data collected by an instrumented vehicle, under a
range of physical and
traffic conditions. The field studies and consequent data
analysis provide a picture of the
reliability and usefulness of GPS data for traffic monitoring
purposes, and hence the
possibilities for the use of GPS in IVHS projects.
The GPS consists of some 24 satellites encircling the earth at
inclined orbits of 60”.
There are six terrestrial control stations that update the
satellites with new information as
it comes to hand (see Fig. 1 for a schematic representation of
the GPS system). GPS is
owned and maintained by the U.S. Department of Defense, and is
available worldwide to
any user who has a GPS receiver. The basic output from a
receiver is the x, y and z
coordinates for a moving or stationary object, at possible
update rates of the order of
once/s. Figure 1 shows the three segments that make up the GPS
system, with the user
segment being the final segment where the GPS data can be used
in many different appli-
cations, such as transport planning, management, control and
scheduling, and hence can
play a potentially important role in IVHS.
193
-
8/16/2019 Gps in Time Domain
2/17
194
R. Zito et
al.
The PS ystem
Space Segment
Fig.
I.
Schematic representation of the GPS system and its
components.
HOW DOES GPS WORK?
GPS satellites are essentially radio stations that are
constantly emitting data, at a
transmission frequency of approx 1500 MHz. Data are received and
processed by GPS
receivers to obtain the latitude, longitude and height
coordinates of the receiver’s antenna.
The advantage of using satellites is that as long as there is a
clear view to the sky the
coordinates of the receiver can be calculated anywhere in the
world: it is also an all
weather system that will give 24 h coverage once fully
implemented. Any other terrestrial
system would have problems with signal blockage due to the
topography of the earth’s
surface. A satellite system therefore provides the best means of
worldwide coverage.
However GPS does suffer from signal blockage: for example GPS
signals will not pene-
trate into tunnels or go through bridges, or may have
difficulties penetrating through tree-
lined streets. This can cause some concerns if tracking a
vehicle with GPS as these features
are quite common in urban areas. However, at present GPS gives
better global coverage
than any other system currently available. One objective of this
paper is to test the ability
of GPS to provide good locational data in various parts of an
urban area. A second
objective is to examine the practical ability of GPS to provide
information about the
speed of a moving vehicle.
The basis of the GPS system is triangulation. The distances from
a set of satellites to the
GPS receiver are measured using the speed of light and the time
taken for the GPS signal
to travel from each satellite to the GPS receiver. These times
are found by examining the
phase shift between the GPS signal and the receiver. Therefore
timing is a crucial part of
GPS. GPS receivers on the ground need consistent clocks that are
accurate to the nano-
second for good positioning results, while the satellites use
atomic clocks for their timing
functions. Once the distance is found, the position in space of
the satellite must be
obtained. This position is transmitted from the control segment
(see Fig. I) and relayed to
the GPS receiver through the satellite, as part of the signal
received from the satellite.
-
8/16/2019 Gps in Time Domain
3/17
Global positioning systems
195
Finally, corrections must be made for atmospheric conditions.
The GPS signal (which
is, of course, electromagnetic radiation) will travel at
different speeds through mediums of
different density. Since the timing is so critical these types
of errors must be corrected for,
since as the GPS signal travels from space to the earth it
passes through the ionosphere,
troposphere and the atmosphere. Corrections must be made
depending on the conditions of
these media. The control segment provides data for the changing
atmospheric conditions. As
an example of how necessary a good timing system is, an induced
error of 1 ps could pro-
duce a range error of 300 m (the range is the distance from a
satellite to the GPS receiver).
The nature of the triangulation calculation is such that there
are four unknowns, which
may be seen as the X, V, z coordinates of the receiver and the
clock drift of the receiver.
The clock drift is the difference in synchronization between the
satellite’s clock and the
receiver’s clock. This must be determined for an accurate range
measurement to be
calculated. Three satellites in view can be pictured as the
intersection of three spheres for
which the radius of each sphere is equal to the range value of
each satellite. The inter-
section of three spheres yields two points in space, one of
which will be on the surface of
the earth (the calculated location point of the receiver) while
the other will be in outer
space and can be ignored. However, this still leaves the clock
drift as an unknown. In the
situation where only three satellites are in view, the procedure
adopted in GPS location is
to calculate the x and J’ coordinates of the receiver and the
clock drift variable for it, and
to leave the z coordinate undetermined. When at least four
satellites are in view then the
four known range values can be used to solve for all four
unknowns, so the x, y, z and
clock drift variable can be computed.
When the GPS system was first introduced there were large
portions of a day where less
than three operational satellites were in view in any given area
of the globe. The GPS
system could only be used for a limited time each day. By 1994,
however, with 24 satellites
encircling the earth, coverage of at least three satellites in
view for 24 h a day was just
about achievable at any point on the earth’s surface. Figure 2
provides a typical indication
of satellite visibility over a 24 h period.
GPS transmits data on two wavelengths: one is Coarse Acquisition
Code (C/A Code)
which has a wavelength of 24 cm and the other is Precise
Acquisition Code (P Code) that
has a wavelength of 19 cm. The smaller the wavelength, the more
accurate the position
calculation will be. However, the cost of the receivers needed
to obtain the P Code data is
Numberof Visible Satellites us Tine
Latitude :34 48’48”s
Longitude :I33 37’84”E
Hmber of Satellites
15 ~
1
J._._..______..._.__._._..__._..__._._.__.__._._.___..__.___._._.___“_I
13J_.__.___._.._____._____._.._.._._..- - ---.-.- .-
_.-...._..._._..._._____..1
12 ]_..______.__.-_-.-._.-._-__.---.--..-.---..__._
..__...._----.J
I I J.-__._--_- ._._.-I..--- --..- -.--.-.--...- ----.
.___.__.....____.__.1
10
_1....-..__._.__.___.._.._.___..___.___.._____.-.__-.^_..____
9
J...-..-._...__-._.._.-..-._.--.-- _..___..-.- __.._._.-.-_--
..-...--..-
_.._ .-._..J
1. _,.___..__,____.,._._._
..-.-...- ___..J
a
--.-. -- ----.-_. _.-.
.-...
-_. _.______._...______..._...._.._._..___..I
0: 00
4:00
a
00 12:00
16:&l 20:00 24:
00
The
Increment of 60.8 minutes
Fig. 2. A sample plot of number of GPS satellites in view over
hours of the day,
-
8/16/2019 Gps in Time Domain
4/17
196
R. Zito et al.
usually more expensive than the C/A Code receivers. For
transportation applications the
accuracies obtained by the C/A Code receivers have proven
satisfactory for most appli-
cations. In contrast the P Code receivers are more suited to
surveying applications.
As well as range data being transmitted by GPS, once an hour
ephemeris and almanac
data are also sent. These are data packets that contain
atmospheric and clock correction
parameters. Almanac data contains corrections to satellite
clocks and atmospheric delay
parameters. It also contains approximate orbital constants for
each satellite, allowing the
GPS receiver to obtain a quick fix on the satellites that are in
view. The ephemeris data
contains accurate orbital constants that are used in the
position calculations. These data
are sent to the satellites from the control segment as shown in
Fig. 1. It is crucial to
the GPS system and must be accurate and reliable for the GPS
system to provide good
positioning solutions. As well as the GPS system supplying
locational data it also supplies
parameters that can be used to assess the reliability of the GPS
data. One of these
parameters is the position dilution of precision (PDOP).
Geometrically PDOP can be
thought of as the inverse of the volume of the pyramid formed by
the satellites in view and
the GPS antenna. Since triangulation is the basis of GPS, the
geometry of the satellite
constellation will affect the quality of the position
calculation. For example if the satellites
used are close to the horizon the quality of the positional
calculation will be in doubt, and
the value of the PDOP will be high, i.e. greater than five. An
ideal situation exists when
the satellites are directly above the antenna at an even
spacing. Good quality results will
emerge and a low PDOP value, i.e. less than three, will be
found. Thus the PDOP value
can be used as a reliability indicator. This is useful, for it
means that although GPS
is not a 100% reliable system there are readily available
indicators that can provide
information on the quality and reliability of the observed GPS
data.
GPS errors
In a system such as GPS there are bound to be a number of
inherent errors. These
include satellite orbit errors, satellite clock errors, receiver
noise errors, tropospheric and
ionospheric errors, coordinate transformations and selective
availability. Satellite orbit
errors occur due to the inherent limitations in modelling the
exact orbits of the satellites.
Satellite clock errors occur due to the inconsistencies in the
clocks used by the GPS
satellites, and the applied corrections not being exact.
Multi-path errors occur when a
reflected signal (e.g. from a tall building or an escarpment)
reaches a GPS receiver and
interferes with the direct signal, so inducing an error.
Receiver noise error is due to the
time taken for the GPS signal to actually get into the hardware
of the GPS receiver. This
error is usually receiver specific.
Other errors, previously mentioned, were the
tropospheric and ionospheric errors that are caused by the GPS
signal being delayed due
to atmospheric effects. A secondary source of error, resulting
from the processing of the
data received from the GPS, could be the transformation of GPS
global coordinates into a
local system. This can occur surprisingly often but is easily
eliminated merely by deter-
mining the correct transformation to use to properly locate the
GPS coordinates on the
available map base However, the biggest source of error from GPS
is due to
sel ecti ve
avai lab i l i ty : the error deliberately inserted into the GPS
signals by the U.S. Department of
Defense. The system was, after all, primarily introduced for
military purposes. The sole
purpose of selective availability is to degrade the accuracies
of GPS for real-time non
U.S.-military users. Errors are introduced into the almanac and
ephemeris data via the
control segment. Selective availability is constantly on, and
apparently the only period for
which it has been disabled was during the Gulf War crisis in the
Middle East, when the
U.S. Armed Forces were obliged for logistical reasons to use
some civilian GPS receivers
to augment their supply of military units.
GPS accuracy
With all the sources of error described above, just what are the
actual positional
accuracies obtainable with GPS? In most transportation
applications it is necessary to talk
about real-time accuracies. Real-time can be defined as the
instantaneous position output
-
8/16/2019 Gps in Time Domain
5/17
Global positioning systems
4000SST 19 Feb Pillar 15
197
Fig. 3. The variability of GPS position information as shown by
the apparent movement of a GPS receiver
located at a known point over an I h period.
of the GPS receiver available at any point in time. It can be
thought of as the coordinates
given by the GPS receiver without any post-processing being
undertaken. Heuristically it
can be stated that in absolute positioning mode GPS can have
accuracies of about f 50 m:
absolute position refers to uncorrected output from a GPS
receiver. The error specifi-
cation for GPS provided by the U.S. Department of Defense is
that location errors will be
better than f 50 m for 95% of the time. If the coordinates are
corrected by the use of a
differential correction either in real-time or after
post-processing then the accuracy is
increased to f 5 m. Figure 3 provides an indication of how the
GPS readings drift, in
absolute positioning mode about a point of known location. In
this example the variation
is well within the f 50 m criterion mentioned, but this is
probably due to a high quality
receiver being used in this case, the Trimble 4000SST GPS unit,
and the presence of at
least four satellites in view for the entire duration of the
test.
A differential correction involves the use of another GPS
receiver located at a known
reference point. Therefore the errors in GPS positioning it
undergoes can be determined
and correction vectors calculated. These vectors can then be
applied to another GPS
receiver to achieve greater accuracies, even with selective
availability in place. Without
selective availability absolute positioning accuracies would
drop to f 5 m and differen-
tially corrected locations would be accurate to the sub-metre
level. Drane (1992) describes
the theoretical background to, and analysis of, GPS errors.
GPS APPLICATIONS IN TRAFFIC STUDIES
GPS time, position and speed data can be usefully employed in
traffic studies and in
vehicle tracking. Speed and acceleration are important
indicators for assessing vehicle and
traffic systems performance, especially in congested conditions
(Taylor, 1992). The follow-
ing sections discuss the availability and accuracy of speed and
acceleration data derived
from GPS observations taken in moving vehicles.
GPS and speed
There are two ways in which speed can be calculated using GPS.
The first and more
obvious is to derive it from the position calculations since all
GPS position calculations
are time tagged. It is a simple matter of dividing the distance
travelled between GPS
readings by the difference in time between these readings to
obtain speed. Combining this
with the fact that present-day GPS receivers can output position
readings at rates of up to
10 p/s, a large set of speed data observations can be obtained.
However, as discussed in
the last section, uncorrected GPS coordinates can have errors of
about f 50 m, so that on
-
8/16/2019 Gps in Time Domain
6/17
198 R. Zito et al.
a second by second basis the error in speed calculated from
distance travelled over a short
time interval can be up to 180 km/h. This result would make the
speed value meaningless.
However, during extensive practical testing this magnitude of
speed error was never
experienced.
Many GPS receivers available at the lower end of the market do
not directly output
speed so the method of calculating speed from distance travelled
over time is the only way
available to obtain a speed value. To make use of this method it
is necessary to apply
correction techniques, including Kalman filtering, to the data
to improve the accuracy of
the derived speed (Zito and Taylor, 1994).
The second method of obtaining speed data is to obtain a GPS
receiver that outputs
speed directly: the one used for the tests described in this
paper is the Trimble SV6 GPS
receiver. This unit employs a method independent of the position
calculations to obtain
both speed and direction of travel (bearing). The method,
described by May (1992) uses
the Doppler effect to measure the rate of change of the GPS
signal and hence derives a
speed directly, in principle the same method as that used in
conventional speed surveys
using a radar gun. The series of tests performed as part of this
study indicated that this
method gave far superior speed accuracies to those based on
speeds calculated from
changes in position over time.
Speed data were collected by the use of the University of South
Australia Transport
Systems Centre (TSC)‘s instrumented Toyota Camry Sedan. The GPS
antenna was
mounted on the roof of the vehicle and data were logged on a
laptop computer in the car.
The car was permanently equipped with the Australian Road
Research Board (ARRB)‘s
Travel Time Data Acquisition System (TTDAS). This system
includes an optical trans-
ducer connected to the speedometer cable of the vehicle, so that
speed readings could be
made directly. See Young and Taylor (1993) for a description of
the TSC instrumented
vehicle and its capabilities. The data from TTDAS consists of
time tagged distance and
speed readings, taken at a rate of 1 reading/s, and were logged
on a second laptop com-
puter. TTDAS gives a reliable speed reading to within f 1 km/h.
Matching the TTDAS
speeds to the speed readings given by GPS allowed speed errors
to be calculated and
analyzed.
Tests comparing speed values from TTDAS and the Trimble SV6 GPS
receiver were
conducted at Mallala, a small rural town north of Adelaide,
South Australia. This site was
chosen because of its topography and the small volumes of
traffic in the area. A long flat
stretch of road with an all-round clear view to the sky was used
just outside this small
township, the speed limit on that stretch of road was 110 km/h
so high-speed tests could
be performed. The method involved driving the instrumented
vehicle at acceleration rates
ranging from 1 to 8 km/h/s along the test section whilst
recording data using GPS and
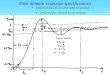
TTDAS simultaneously. Figure 4 shows a typical result for the
TTDAS and GPS speed
profiles. At the scale used for this plot the two speeds appear
to match extremely well.
Even when the scales of the graphs are enlarged the lines still
overlap. This is quantified by
Fig. 5, where it can be seen that most of the speed errors lie
in the range of f 2 km/h with
only a few outliers. This is a pleasing result, since it also
shows that the speed error is not
related to the actual speed of travel, but more so on the GPS
conditions. The mean speed
error for this set of data is 0.21 km/h with a standard
deviation of 1.35 km/h. Remember
that the TTDAS system is only capable of accuracies to within f
1 km/h.
An interesting observation to come from this test and many
others performed is that
the mean of the speed error has always been skewed positively.
This is probably best
explained by the fact th_tt when the vehicle is stationary i.e.
its speed is zero km/h, the
GPS receiver may still be recording a speed of up to 2.0 km/h.
This is due to the inherent
errors that are involved in GPS but can mainly be attributed to
selective availability.
Another interesting observation is that when the speed errors
are collected and plotted
on a histogram, the distribution of the errors has a similar
form to a normal distribution
(see Fig. 6). In fact, the distribution is not normal, with the
differences essentially being
that there are outliers present, the shape of the curve is
“spikier” than that of the normal
distribution (observed kurtosis coefficient of 4.600 compared to
an expected value of three
-
8/16/2019 Gps in Time Domain
7/17
Global positioning systems
199
Comparison of llDAS and SV6 Speed
0 500
1000
1500 2000
2500
Time (sets)
Fig. 4. Comparison of SV6 and TTDAS speeds (Mallala data).
Speed Error v Speed
All Data Sets From Mallalo
6
Speed (km/h)
Fig. 5. GPS speed error vs vehicle speed (Mallala data).
Speed Error Bins
Speed
Enor Bh’ts
km/h) (0.5 Intervals)
Fig. 6. Speed error histogram (Mallala data)
-
8/16/2019 Gps in Time Domain
8/17
200
R. Zito et al.
Comparison of SV6 Direct and Calculated Speed
20
40 60
80
IQ) 120
SV6 Dlred Speed km/h)
Fig. 7.
Comparison of calculated and direct GPS speeds with actual
travel speed obtained from TTDAS
(Mallala data).
for the normal distribution), and the mean is skewed slightly
negative (skewness coeffi-
cient -0.009). As a comparison 72.5% of the speed errors lie
within 1 SD of the mean,
hence the spikiness of the curve. For the normal distribution,
67.5% of the data points
would lie within 1 SD of the mean. However, 94.5% of the speed
errors in Fig. 6 lie within
+2 SD of the mean, whereas for the normal distribution 96.6% of
the data points lie
within that range. To confirm this visual discrepancy between
the observed distribution of
errors and the normal distribution, a x2 test of goodness-of-fit
was conducted by fitting a
normal distribution with the observed mean and standard
deviation of the errors to the
data in Fig. 6. This yielded a x2 statistic of 70.85 (14 df),
which is highly significant (the
0.01 significance level is 29.14). The discrepancy is probably
best explained by the fact that
there are always likely to be a number of outliers occurring
when the GPS receiver loses
lock on a satellite, or there is a change in the visible
constellation of satellites.
All the above results have dealt with speed values obtained
directly from the GPS
receiver. Figure 7 shows a comparison of calculated speed (as
the speed calculated from
the change in distance over time) as well as the direct speed
observations. The relation-
ship between actual direct (GPS) speed and actual (TTDAS) speed
is a line at 45”,
which is consistent with the earlier findings. A linear
regression performed on the data
yielded a line of best fit with
r =
0.999 and a slope of 0.999 for a data set of some 1593
Acceleration Error v Acceleration
All Cuta Sets From Mallala
.
I
Accelemtlon
km/h/s)
Fig. 8. GPS acceleration error vs acceleration given by TTDAS
(Mallala data).
-
8/16/2019 Gps in Time Domain
9/17
Global positioning systems
Acceleration Error Bins
201
Accdomtlon Error
Fig. 9. Acceleration error histogram for the Mallala data.
observations. Although there are a number of outliers visible in
this plot, this could be
expected given the large data set-the interesting question is
under what conditions
can these outliers occur and can these conditions be anticipated
given knowledge of GPS
signal quality indicators such as PDOP? This question is pursued
in subsequent sections
of this paper. Interestingly enough, calculated speed showed an
almost random relation-
ship with the TTDAS speed, which is reflected in an
r2
value of 0.001 in comparisons of
those two data variables. This further emphasises the finding
that, whenever possible,
direct GPS speed must be obtained, since calculated speed gives
such poor results. Receivers
that enable direct speed to be obtained are now more common and
are continuing to
reduce in price, in this way enabling the mass market
availability of GPS.
GPS and acceleration
Acceleration is a derived quantity, and neither GPS nor TTDAS
provide it directly.
Acceleration must be calculated using the change in speed
divided by the change in time.
The value of acceleration can then be seen to be relatively
reliable since the change in time
is small at approx 1 s. Figure 8 shows acceleration error,
defined as the difference between
the GPS-derived acceleration and the TTDAS acceleration, plotted
against the TTDAS
acceleration. It shows similar properties to Fig. 5 in that even
at the higher and lower
acceleration rates the acceleration error does not seem to
increase at all but seems to stay
within the range of *2 km/h/s.
When the acceleration errors are grouped and displayed on a
histogram (Fig. 9) it can
be seen that the distribution is very much gathered around a
mean value that is close to
zero. In fact the mean of the acceleration errors is 0.003
km/h/s, with a standard deviation
of 0.66 km/h/s. It was also found that 84.6% of the errors lie
within ?C1 SD of the mean
and 94.5% lie within *2 SD of the mean. The distribution has a
positive skew, with a
skewness coefficient of 1.029. In similar but more pronounced
fashion to the results for
the speed errors, the observed error distribution is “spikier”
than the normal distribution
(observed kurtosis coefficient of 14.17). Since the acceleration
values are derived from the
speed values perhaps these results are not really surprising.
However the results are
encouraging and give a user some confidence of accuracy and
reliability in the results
obtained by the GPS system under good GPS conditions, as found
at the Mallala test site.
USE OF THE GPS SYSTEM IN A DOWNTOWN AREA
Although the tests performed at Mallala show that the accuracies
obtained by GPS can
be quite satisfactory for traffic monitoring, the conditions
these tests were performed in do
not represent typical urban driving conditions. One of the major
disadvantages of GPS is
-
8/16/2019 Gps in Time Domain
10/17
202
R. Zito et
al.
Fig. 10. Map trace of a GPS downtown run in the CBD of Adelaide,
Australia.
that it can suffer from signal blockage, and nowhere is that
more apparent than in the
downtown area, or central business district (CBD) of a city,
where high rise buildings
form concrete canyons that make it difficult for the GPS signals
to reach down to the
antenna on a vehicle. Figure 10 shows a run performed by the TSC
instrumented car
whilst driven in the CBD of Adelaide, South Australia. Adelaide
is the capital city of that
state and has a population of 1 million people.
The track of the vehicle in Fig. 10 has been represented by the
use of three different
shapes: squares, triangles and circles. The squares represent
points where only three
satellites were in view, for which only a two-dimensional fix
was able to be calculated. The
triangles represent the points where PDOP exceeds three and/or
the number of satellites
(NSAT) is only equal to three. The circles represent the points
where signals from four
satellites were available to obtain a fix and PDOP was less than
three. Generally it can be
seen that the triangles and squares lie further from the centre
lines of the roads than the
circles. This is a useful result since it means that a GPS user
can gain some idea on the
integrity and quality of the results from the GPS system, by
observing NSAT as well as
the PDOP. This information is readily available as a standard
part of the GPS output
data. For example, if the GPS data shows that there are only
three satellites in view and
that the PDOP is greater than three then the user must treat the
corresponding GPS
positional data with care, as it is likely to be unreliable. In
addition, the GPS data stream
is a sequence of second-by-second observations in which there
may be some missed
observations due to signal blockage, but these may not be
important in providing an
overall picture of the progression of the vehicle. By way of
comparison, during the
Mallala test there were always at least four satellites in view
and the PDOP was always
less than three.
If the positional accuracies may be degraded in the CBD, then
what happens to the
accuracies of the GPS speed data? The speeds logged by the
Trimble SV6 GPS receiver
used in the CBD run were analyzed in similar fashion to the
Mallala data set. It was found
that the speed accuracies were also degraded in the CBD. Figure
11 shows that there is
a wider spread of the speed errors over the entire speed range
when compared to the
Mallala results (Fig. 5).
-
8/16/2019 Gps in Time Domain
11/17
Global positioning systems
Speed Error v Speed
All
Cata From
City
Run
10
.
a-
.
203
-a
Speed (km/h)
Fig.
I I.
GPS speed error vs vehicle speed (Adelaide CBD data).
GPS Run in the CBD
7-
6 -.
,---
No
Sots
PDOP
Fig. 12. GPS speed error. number of satellites in view and PDOP
vs time. for the Adelaide CBD data
Analyzing the results of Fig. 11 revealed that the average speed
error for the CBD data
was 0.60 km/h with a standard deviation of 4.2 km/h. Both the
mean error and the
standard deviation of the errors are about three times those
found for the Mallala results,
but they are still good enough for the data to be useful. Speed
error, the number of
satellites (NSAT) and PDOP were then plotted against time (Fig.
12). The general trend
of these plots shows that the speed errors seem to increase
whenever the PDOP values are
high (i.e. greater than three) and/or NSAT drops to three.
Thus the experiments have shown that, even though in some
circumstances the GPS
system can appear to provide unreliable results, the user can
always obtain some indi-
cation on the quality of the GPS signals by keeping track of
standard GPS variables such
as the number of satellites present and the PDOP. However,
another important concern is
when shadowing from the surrounding buildings is encountered,
and NSAT drops below
three, so a GPS fix cannot be made. Occurrences of this
phenomenon are shown in Fig. 10
by the large gaps between the dots in some of the tracks. What
can also be seen in this
figure is the self-adjusting nature of the GPS system. When
observations were missed the
GPS receiver was able to regain lock on at least three
satellites within a short period of
time (of the order of a few seconds). Thus although GPS by
itself may not be a 100%
reliable system, it is capable of providing an ongoing stream of
position and speed data at
a minimum frequency of observation likely to be useful for most
traffic monitoring tasks.
-
8/16/2019 Gps in Time Domain
12/17
204
R. Zito et al.
The value of the GPS position and speed data can be assessed by
reference to GPS system
parameters provided with that data.
GPS AND RELIABILITY
As indicated above, GPS alone may not provide a completely
reliable vehicle tracking
system in some environments. Whether this is a problem will
depend upon the application
being considered. For example, if GPS were being used by a
courier company to monitor
the location of their fleet, then a temporary loss of lock on a
vehicle would not incur any
major consequences. However if a vehicle tracking system was
being used by emergency
service for routing and dispatching then the consequences of
having that type of a system
working for only 90-95% of the time might be less
acceptable.
There are a few techniques that could be applied to GPS to make
it more reliable, see
for instance Sweeney and Loughmiller (1993). The first of these
is to incorporate a dead
reckoning system together with GPS. The dead reckoning system
could implement the
use of inertial systems to determine the position of the vehicle
from a starting location.
Inertial systems do suffer from long term drift so GPS could be
used to apply periodic
corrections to bring the system back on track. In this way the
advantage of both GPS and
inertial systems are utilized to give a vehicle tracking system
that is as close to 100%
reliable as one could hope to get at present. However this
option is resource hungry, for
not only does the GPS hardware have to be obtained but also the
gyroscopes for the
inertial system must be purchased. Then the appropriate software
must be developed or
acquired to link the two systems together. If this option were
to be employed, the large
resource implications required to implement the system,
especially in fleet applications,
might make it prohibitive.
A simpler option than the inertial system could be to make use
of a magnetic compass
and a transducer connected to the speedometer cable of the car.
In this way if GPS were
to lose lock on the satellites then the compass would give the
direction of travel and the
transducer could give the distance travelled so a position could
be calculated from this
information until GPS regained lock. This option would give good
reliability but would
still need advanced software and hardware to make it
operational. Connection to terres-
trial positioning and communications systems such as the ANTTS
(Automatic Network
Travel Time System) in Sydney, Australia (Longfoot and Quail,
1990) or the Houston
Automatic Vehicle Identification (AVI) system (Levine and
McCasland, 1994) would be
another option.
The simplest option would be to store the last direction of
travel and speed and
periodically extend the track of the vehicle using these
parameters. This would not be as
reliable a solution as the first two options but it would be
easier to implement, more cost
effective, and for certain applications, such as off-line
monitoring of a vehicle traversing a
pre-selected route (e.g. a bus), would be quite suitable.
When accuracy is a particular concern then there are options to
apply corrections to
the GPS coordinates either in real-time or in post-processing,
The correction is called a
differential correction and takes the calculated apparent errors
of a GPS receiver fixed on
a known point and applies them to the roving GPS receiver.
Dailey et al (1993) discussed
an example of a pilot system using differential GPS as part of a
traffic information and
management system in Seattle. A differential GPS system requires
a reliable com-
munications link to pass the corrections from the base station
to the rover for real-time
applications. For the post-processing option differential
processing software must be
purchased or developed, and the GPS receivers that are able to
perform this correction are
usually more expensive. However, if the roving receiver does not
have at least three
satellites in view it still cannot calculate a position so the
correction cannot be made.
The easiest solution of all but probably the least practical is
to only use GPS when there
are at least five satellites in view. This will increase the
reliability of GPS data and give
better quality solutions. It will not, however, guarantee that
lock will not be lost in the
concrete canyons of the CBD, although it will reduce the
chances. Software can be
-
8/16/2019 Gps in Time Domain
13/17
Global positioning systems
205
purchased from GPS receiver distributors that will allow
planning of a GPS run. Statistics
are given on how many satellites will be in view for how long
and what position in the sky
they will be. Although this solution is easy to implement it is
not very practical for most
applications, as it limits the use of GPS to time periods
favoured by the GPS system
rather than for time periods of interest to the traffic engineer
or the transport services
operator.
USES OF GPS IN TRAVEL TIME SURVEYS
Travel time and delay data are important in assessing the
performance of a road traffic
system, especially in urban areas (Taylor et al., 1995). Travel
time and delay also provide
necessary information for use in route guidance and congestion
monitoring systems
(Taylor, 1992). Since GPS has the ability to log time-tagged
position and speed data it is
an ideal tool for travel time surveys. Linking GPS to a
geographical information system
(GIS) creates a powerful data collection, display and analysis
technique. Such a technique
has been developed at TSC, by linking the GPS data and the
MapInfo for Windows GIS
software. Figure 13 shows an example of the interactive data
display and analysis method,
in this case applied to data from a travel time survey performed
on the Eastern Freeway
in Melbourne, Australia. The dialogue box labelled “Info Tool”
displays a number of
attributes which have been associated with each point in the
travel time survey. These
attributes include an individual identification number, the
longitude and latitude of the
point, the actual time of observation, the elapsed time from the
beginning of the journey,
the total distance travelled in the journey so far, the distance
between the last reading and
the present one, the speed of the vehicle at that point, the
percentage stopped time so far
in the journey and the direction of travel (as a compass
bearing). The advantages of dis-
playing the results in a GIS are apparent, for example the
display of the street network
.
.:’
Info
Tool
ID: 354
k
Total_Distnce. 9.880
Mta_Dtstance. 0.120
Speed:/61
1
Stop_Tlme_ 33.0
I----+
earlng~ N
I I
able: EASTIPM x
Fig. 13. GIS interactive map display of a GPS travel time survey
on the Eastern Freeway in Melbourne,
Australia.
-
8/16/2019 Gps in Time Domain
14/17
206
R. Zito
et al
Eastern Freeway 4 May PM
Peak
steppe
lTDAS
d Time
Eastern Freewa y 4 Ma y PM Peak
Stopped
‘/TRACK
Time
21
aa
oving
Moving
fime
Time
79
80
Fig. 14. Comparison of stopped time recorded by TTDAS and GPS
(Eastern Freeway, Melbourne)
together with the travel time observation points provides a
clear picture of the survey
route. In addition, the GIS also provides a powerful database
analysis tool, so that the
attributes associated with each data observation can be queried.
Figure 13 also displays an
example of a simple query: what data points in the journey have
a speed value less than or
equal to 5 km/h? The corresponding points meeting this condition
have been displayed as
squares along the path trace in the figure. The ability to
provide interactive query and
answer information of this type enables the analyst to determine
the congested sections
along the surveyed route. Figure 13 shows that the main areas of
congestion occur before
entry onto the freeway and at a couple of the exit points along
the freeway. This kind of
data can be used to determine where heavy congestion occurs.
Zito and Taylor (1994)
provided a full description of this system.
Stopped time
The amount of stopped time in a journey is an important
performance indicator when
assessing the efficiency of a road system and the level and
extent of congestion. As
described above, GPS has the ability to calculate and store
stopped time data. When the
stopped times given by TTDAS were first compared to GPS stopped
times, the GPS
values significantly underestimated the TTDAS figures, which
were known to be accurate.
This initial comparison used a GPS speed of zero as the
indicator that the vehicle was
stopped. As indicated earlier in this paper, the GPS receiver
may still be recording speeds
of up to 2 km/h when it is actually stationary. Therefore there
is an obvious error when
trying to calculate the amount of time that the probe vehicle is
stationary (actual speed
zero). Choice of a criterion that all GPS speeds of less than 1
km/h indicate that the
vehicle is stationary was found to produce reliable estimates of
stopped time. Figure 14
indicates that the difference in the percentage of observed
stopped times between TTDAS
and GPS was only 1%. This result has been consistently repeated
in other GPS travel time
runs. It suggests that the GPS technique has significant
potential for use in travel time,
delay and congestion studies, given its low cost and
versatility.
DATA FORMAT PROTOCOLS
Present day GPS can provide a user with large amounts of data,
at rates of up to
10 readings/s, with a rate of 1 reading/s being most common. If
these data are not
managed properly or if the application that the GPS is being
used for does not require
update rates of this rapidity then GPS could be seen as
contributing to information
overload. A number of standard data protocols for GPS are
available, and the choice of
the most desirable protocol for a given application must be
considered, for it provides one
means to counter information overload. One of the most common
data format protocols
is the NMEA (National Marine Electronics Association) standard
protocol. It is primarily
designed for marine instrumentation, on the basis of
communications using an ASCII
sentence library. The ASCII sentences can be transmitted from
the receiver sequentially at
rates of up to l/s. In a vehicle tracking context only two
sentences are required. The first is
the GGA sentence which gives the most comprehensive information
for a GPS fix within
-
8/16/2019 Gps in Time Domain
15/17
Global positioning systems
207
the standard. It includes variables such as universal time,
latitude, longitude, a quality
indicator which determines what type of GPS fix is being used,
the number of satellites
(NSAT) used in the fix, the PDOP, the altitude, the geoid
ellipsoid separation, and the age
of the differential correction (if applicable). The second is
the VTG sentence which gives
direction of travel and speed indicators. This type of data
protocol was successfully used
during the travel time surveys mentioned above, for it can
provide a large amount of data
frequently (Zito and Taylor, 1994). This protocol is preferred
when an analysis is required
on parts of the journey as well as the journey as a whole, as is
the case in traffic systems
surveys.
A variation to the NMEA standard is the TAIP (Trimble Standard
ASCII Protocol)
protocol. This is configured such that it will only output GPS
data when the user sends the
receiver a specific string a specifying what data are required.
A useful application of this
type of communication protocol would be in fleet monitoring
applications, where the user
is not interested in knowing where the vehicle is continually,
but rather what is the status
of the fleet when a new service is required, so that the most
appropriate vehicle to perform
the service may be selected. This type of protocol greatly
reduces the amount of data
being processed by the control station and so helps to reduce
possible information over-
load in, say, fleet management, despatching and scheduling
applications.
REAL-TIME IVHS AND GPS
GPS has the ability to collect and store large amounts of useful
data. If these data could
be used in real-time then a number of applications in IVHS would
be opened up. If data
such as percentage stopped time and speed of a probe vehicle
circulating in a network
could be known in real-time, which is eminently feasible given a
good communication
system, then assessments can be made as to where congestion
levels are highest. This
information could then be relayed to the public as part of a
traffic user information system
(e.g. Koutsopoulos and Xu, 1993; Rilett and Van Aerde, 1993;
Collier, 1993) for instance
providing drivers with warnings to avoid areas where congestion
delays were expected.
How this information could be relayed would depend on the
authority that had control
over it. Methods for IVHS applications include the use of
advance warning signs and
electronic billboards along highways to display this
information, and radio stations
devoted to providing the public with details of current traffic
situations.
Public transport could also greatly benefit from GPS. Commuters
could be informed of
the likely arrival time of the next buses and also notified of
any delays or deviations from
schedules that may have been encountered. If the whole or a
major proportion of the
public transport fleet were equipped with GPS then real-time
information of traffic con-
gestion could also be obtained. Perhaps this might reduce the
need for dedicated probe
vehicles to be used, which might be seen as contributing to
congestion themselves. If
government agencies were to fit out their vehicles with GPS then
this would be another
source where a transport department could obtain real-time
information about congestion
levels. Equipping government vehicles and taxis with
transponders for terrestrially-based
location systems has already been undertaken in some places, for
instance the ANTTS
system in Sydney (Longfoot and Quail, 1990) has seen road
transport agency vehicles and
metropolitan taxis so equipped. In Houston, Texas, a pool of
volunteer drivers have had
their vehicles equipped with transponders which then provide
information back to a
central controller (Levine and McCasland, 1994). The major issue
with this approach lies
in the way to tap and manage the available data so that sense
can be made from it.
Understandably, a large fleet equipped with GPS which is
constantly sending information
back to a control station is likely to overload the control
station. There appears to be
good sense in avoiding the presence of a large number of
special-duty probe vehicles,
especially in congested areas if those vehicles themselves
contribute to the congestion. On
the other hand if the fleet equipped with GPS is so small that a
representative picture of
congestion levels cannot be obtained then the quality of
information being obtained must
be suspect. Methods such as aggregating data and selecting only
appropriate yet sufficient
-
8/16/2019 Gps in Time Domain
16/17
208
R.
Zito et al.
data are issues to be addressed in the development of advanced
traffic control and driver
information systems. Research is also needed on specific issues
such as optimum popula-
tion size and distribution for probe vehicles in a network, to
obtain satisfactory coverage
whilst not unduly affecting congestion levels or overloading the
monitoring system, and
on the combination of vehicle location methods (e.g. GPS in
combination with dead-
reckoning or terrestrial location systems) most appropriate for
comprehensive coverage in
an urban area.
CONCLUSIONS
Methods for automatic vehicle monitoring (AVM) form an integral
component of
IVHS technology, with many IVHS applications requiring
information on the real-time
location of vehicles. GPS offers one readily available method,
of low cost to users who
need only provide suitable receivers to use the GPS satellite
system. The question has
been, just how useful and accurate is GPS information,
especially for mobile applications?
This paper has presented some basic findings about the use of
GPS in IVHS and other
road traffic-related areas, and has described the results of
some extensive field trials,
conducted under a variety of conditions, that suggest that
useful traffic and travel data
can be taken from GPS, and that the commonly available GPS
information also contains
information on the quality of the received information.
The following conclusions may be drawn from the experimental
program described
here:
(a) GPS can provide useful real-time data on vehicle position
and speed, provided that
account is taken of the quality of the signals received in
judging the usefulness of the
observed data. In this regard, particular attention needs to be
given to those obser-
vations which are taken immediately following a change in the
number of satellites
available or the constellation of satellites in view.
Significant errors can occur in
such observations;
(b) the choice of GPS receiver capability is important in
vehicle monitoring appli-
cations, and preference should be given to those GPS receivers
expressly designed
for mobile use. These receivers are not necessarily the most
expensive available.
The important feature for a suitable GPS receiver is its ability
to provide direct
measurements of the speeds;
(c) GPS direct speed measurements should always be used in
preference to speeds
calculated on the basis of vehicle positions over time. Such
calculations are likely to
be error prone, whereas the direct speeds correspond closely
with those observed
using on-board vehicle instrumentation;
(d) the errors from GPS are dependent on the physical
environment (topography and
built form) of the region in which a probe vehicle is operating.
Errors increase
in dense urban areas e.g. downtown areas, compared with other
environments.
Suburban and rural areas provide the minimum errors. The effects
of physical
environment lie mainly in the restrictions that will be placed
on the number of
satellites visible to the GPS receiver;
(e) there is evidence that errors in direct speed measurements
can be related to GPS
performance parameters (e.g. number of satellites and PDOP) that
are provided as
part of the standard GPS information strings. Further work is
required to firmly
establish the possible relationships and to test the relative
value of alternative signal
quality parameters, but at this stage the occurrence of sudden
changes in PDOP and
NSAT may be taken as indications of possible errors in position
and speed values at
that point in time. These errors will then dampen down in
successive (second by
second) observations.
The general conclusion is thus that GPS has much to offer as a
vehicle identification
and monitoring tool for IVHS applications. As described in this
paper, the GPS system
has the capability to provide large amounts of individual time,
position and speed data at
-
8/16/2019 Gps in Time Domain
17/17
Global positioning systems
209
rapid update rates. A key issue is thus one of data management,
so that a steady string of
reliable and useful information on vehicle position and progress
can be obtained. One
promising example shown in the paper is the use of GIS as a
display and analysis tool for
the GPS data. Without such tools, GPS might well do little more
than add to information
overload. Data management is the key to transforming good data
into useful information.
To obtain reliable GPS data several considerations must be taken
into account. Firstly
the minimum degree of accuracy needed by the application must be
known. Is centimetre
accuracy (as in a land surveying application) required, or is f
5 or * 50 m satisfactory?
Are the data required in real-time, or can they be
post-processed? These are some of the
questions to be considered when considering a potential GPS
application. The answers to
these questions help to determine the necessary features of
suitable GPS receivers for the
application, such as the number of input channels, need for
inbuilt memory, and the kind
of GPS processing software. There are also a number of features
common to all GPS
receivers: as clearly demonstrated by the field studies both
speed and position data can be
degraded in unfavourable physical environments (e.g. the
concrete canyons of a CBD).
Then the use of the signal quality indicators should be
considered so that assessments can
be made of the reliability of the incoming GPS data.
This area of GPS reliability demands further research at
present. GPS is based on “line
of sight” principles. If there is not a clear view to the sky
(e.g. in a tunnel or under a
bridge) then readings are not possible. When the view to the sky
is restricted, inferior
signals may result in less accurate data observation. Other
systems such as “dead
reckoning”, or simply using the last bearing and speed value to
calculate a new position,
may have to be used until the GPS position is re-established.
The experiences gained in the
Adelaide field trials suggest that these lost signal durations
will only be of the order of
seconds under normal operating conditions. Of course, it must
also be noted that alter-
native technologies may not be capable of providing the wealth
of information available
from GPS at anything like the same update rates. GPS stands
ready as a valuable tool for
IVHS applications. given adequate attention to its possible
shortcomings.
REFERENCES
Collier C. (1993) An information network for route guidance and
travel guidance systems.
Par@ Rim TransTech
Confiwncr~ Volume I. Advanced Technologies. Third 1n1. Co@ on
Applications qf Advanced Technologies in
Traruporration Engineering
(Hendrickson C. and Sinha K., Eds), pp.
265-271.
ASCE. New York.
Dailey D. J, Haselkorn M. P. and Lin P. (1993) Traffic
information and management in a geographically dis-
tributed computing environment.
Pacific Rim TransTech Conference- Volume I: Advanced
Technologies.
Third Ini. Conf. on Applications of’ Advanced Technologies in
Transporration Engineering
(Hendrickson C. and
Sinha K.. Eds), pp. 159 165. ASCE, New York.
Drane C. (1992) Positioning Systems: u Un ed Approach.
Springer-Verlag, Berlin.
Koutsopoulos H. N. and Xu H. (1993) An information discounting
routing strategy for advanced traveller
information systems,
Transpn. Res.-C. 1, 249-264.
Levine S. Z. and McCasland W. R. (1994) Monitoring freeway
traffic conditions with automatic vehicle identi-
fication systems.
ZTE Ji 64, 23 .28.
Longfoot J. E. and Quail D. J. (1990) Automatic network travel
time measuring system (ANTTS).
Pro