Embed Size (px)
Citation preview

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 1/14
GEOPH YSICS, VOL. 52 , NO. i jj.&NUPiiW i987); P; 37-50, ii PIGS., 3 TABLES .
Two-dimensional velocity inversion
synthetic seismogram computation
Tianfei Zhu* and Larry D. Brown*
and
ABSTRACT
A traveltime inversion schem e has been developed to
estimate velocity and interface geometries of two-
dimensional media from deep reflection data. The veloc-ity structure is represented by finite elements, and the
inversion is formulated as an iterative, constrained,
linear least-squa res problem which can be solved by
either the singular value truncation method or the
Levenberg-Marquardt method. The damping factor of
the Levenbe rg-Marqu ardt method is chosen by the
model-trust region approach. The traveltimes and de-
rivative matrix required to solve the least-squares prob-
lem are computed by ray tracing. To aid seismic inter-
pretation, we also include in the inversion sch eme a fast
algorithm based on asymptotic ray theory for calculat-
ing synthetic seismograms from the derived velocity
model. Nu merical tests indicate that the inversionscheme is effective, and that the accuracy of inversion
results depends upon both noise in the data and the
aperture of recording used in data acquisition. Two real
examples demonstrate that the new inversion scheme
produces velocity models fitting the data better than
those estimated by other approaches.
INTRODUCTION
Results from d eep reflection profiling have shown that the
continental crust is typically laterally heterogeneous due to
nonhorizon tal interfaces and/or la teral velocity variations
(e.g., Schilt et al., 1979 ). The velocity s tructure of these hetero-
geneous media from the deep reflection data must be deter-
mined in order to exploit them. A conventional approach for
estimating subsurface velocities is to treat s tacking velocities
from normal-moveout (NMO) analysis as root-mean-square
(rms) velocities and then compute the corresponding interval
velocities by using the Dix equation (Dix, 1955; Taner and
Koehler, 1969; Al-Chalabi, 1974). However, this approach
may produce unacceptable errors in the interval velocities be-
cause it assumes a horizontally homogeneous medium and
even then is valid only for small source-receiver offset.
A m ore flexible approach was proposed by Sattlegger (1965)
who modeled the subsurface as a stack of dipping, c onstant-
velocity layers and estimated both layer velocities and inter-face dips and depths by classical least-squares inversion. While
this approach may be useful for data collected with sm all
offset, for deep reflection data recorded with large offset the
effect of lateral velocity variations could be so significant that
the constant-velocity layer model wou ld no longer be appro-
priate.
A method for modeling lateral velocity variations w as pro-
posed by Aki et al. (1977 ). They divided a horizontally layered
medium into rectangular blocks, and then estimated a con-
stant perturbation for each block by inverting trave ltime d ata.
With this block model, however, it is difficult to accommodate
nonhorizon tal interfaces comm only detected by deep reflec-
tion su rveys. This m odel also introduces artificial dis-
continuities cau sing problems for ray tracing. Hawley et al.(I 98 I) sugges ted using an interpolation function to vary veloc-
ities smoothly between blocks, but suc h smoothing may de-
crease the resolution of vdoeity estimates.
Since asymptotic ray theory implies smooth velocity vari-
ations within each layer, it is more app ropriate to represent
such a med ium by finite elements. In the inversion schem e
described here, we divide each layer of a medium into finite
elements, assigning each nodal point of the elements a velocity
(node velocity). Velocity within an element is linearly interpo-
lated from its node velocities. With this velocity mo del, no
additional smoothing is necessary for ray tracing. Since the
finite-element model includes triangular, rectangu lar, and
trapezoidal elements with adjustable boun daries, it is not difi-
cult to incorporate nonhorizontal interfaces whose dips and
depths can change during iteration. This is desirable because
in our inversion sch eme interfaces are not fixed as they are in
the scheme of Aki et al. (1977); instead, interfaces are esti-
mated, a long with the node velocities, from reflection travel-
time data. Furthermore, the finite-element model is flexible
and it is possible to approxim ate a velocity structure from a
few large elements.
Seismic velocities and reflector depths were also determined
simultaneously from shallow reflection data by Bishop et al.
Manu script receivedby the Editor December31, 1985; evisedmanuscript eceived une6, 1986.*Institute for the Study of the Continentsand D epartment of GeologicalSciences, orn ell University, thaca, NY 14853.
#P 1987 Society of Exploration Geophysicists. All rights reserved.
37

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 2/14
38 Zhu and Brown
(1985) using a rectangular block model with smoothing. In
addition to employing a different velocity model, the emphasis
of the present study also differs from that of Bishop et al.
(13%); Whtle they cm~ eLl’d 7-d !arg seismic tomogra phy prob-
lems. the main purpose of this study is to develop a flexible
inversion technique for determining accurate velocities from
several selected field reco rds. Such velocities are often useful
for interpretational purposes such as calibrating the velocity
profiles routinely produced in data processing by the conven-
tional method.
The inversion is explicitly formulated as an iterative, con-
strained. linear least-squares problem that can be solved by
either the singular value truncation (SVT) method (Wiggins,
1972; Lawson and Hanson, 1974), or the Levenberg-
Marquardt (L-M) method (also known as the damped least-
squares method) (Levenberg, 1944; Marquardt, 1963-). Suc-
cessful application of the L-M method req uires an appropriate
damping factor (L-M param eter). In this study, we introduce
the model-trust region approach (More, 1977; Dennis and
Schnabe l, 198 3) to optimize the choice of the damping factor.
To aid seismic interpretation and reduce the nonuniquene ss
in traveltime inversion, we also incorporated into the routine
an algorithm for computing reflection seismograms for a two-
dimensional (2-D) medium. This algorithm is similar to an
efficient approach used by M arks (1980) and Spence et al.
(1984 ), and the width of a ray tube in the out-of-plane direc-
tion is computed by an analytic express ion, Unlike theirs,
however, our algorithm is not limited to a particular velocity
model, but is applicable to any media where the ray method is
valid. B y using this algorithm, the synthetic seismograms for
an estimated velocity model can be generated, along with the
velocity inversion, with little additional effort.
We discuss the formulation and solution of the inverse
problem, and the algorithm for computing synthetic seismo-
grams. Then we present results from num erical tests which
illustrate the capabilities and limitations of the inversion
scheme, and the effects of noise in the data and of the apertureof recording (i.e., maxim um source-receiver offset) on the final
results. In two real data exa mples, we compare the results
from our inversion scheme with those from other methods.
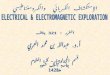
0 E*X
FIG. I. Finite-element velocity model and a reflected ray OE.The thick lines represent the interfaces and thin lines are div-ider boundaries of the finite elements.
MODEL AND FORMULATION
Velocity model
In the finite-element velocity model u sed in this study. each
layer of a 2-D medium (e.g., Figure 1) is divided such that an
interface always forms the boundaries of certain elements.
Thus there are two types of boundaries between adjacent ele-
ments: divider bound aries across which velocities are continu-
ous (thin lines in Figure 11,and interfaces (thick lines in F igure
1). To represent the velocity discontinuity across an interface,
two nodes with different node velocities are assigned to each
intersection point involving the interface, while only one node
is assigned to an intersection point of two divider bound aries.
The locations of interfaces may c hange during iterations of an
inversion. All nodes in Figu re 1 are labeled. For examp le, the
nodes of a typical element (F in Figu re I) a re iabeied p, 4, r,
and s. The corresponding node velocity and node coord inates
such as those for node p are deno ted a s cp and (xp, z,), respec-
tively. The velocity at a point (x, Z) within F is linearly inter-
polated from the surrounding node velocities by
2$x. Z) = A + B(x - x&J+ C(z - ZP)
+ D(s - xp) (z - “J.
where
(l)
A = PC’
c = (c, - UJ/(Z, - z&J,
:D = (c, - L',,) :
i 1(x, - x,&z, - zq) - C/(x, - xP),
an d
B =
[
f’ - up - C(Z,? zp)I’(x . XJ - D(z, - “J.//For a triangular element, D = 0. and the velocity gradient
within this element is constant. In the case where each layerforms an e lement with constant velocity. the model redu ces to
Sattle gge r’s mod el.
The interfaces within the medium are approximated by
straight lines:
zt = a/.x + b,, f = I, 2, . , L,
where L is the total number of interfaces in the medium and a,
an d h, are referred to as interface parameters. Thus the
medium is now represented by a set of model parameters
consisting of P node velocities and 2L interface parameters
which ca n be written a s a vector of length M = P + 2L ,
m = (ml, m2, . . . . 111~)~.
where T denotes matrix transpose. With this parame -terization, we can formulate the inverse problem.
Linearization of the nonlinear least-squares
problem
The associated forward problem is to calcula te reflection
traveltimes for a parameter vector m by the system of nonlin-
ear equations
T = T(m).
where T=(T,, T, ,..,, TN)’ corresponding to N (N > M) ob-
served traveltimes t = (t,, t2, , t,)‘‘ The inverse problem is

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 3/14
Velocity Inversion and Seismograms 39
to find an m tha t m inimizes the sum of squares of the difTer-
ences between T and t, which can be written as
min II t - T(m) II, (2)
where 11 - T(m) 11 [t - T(m)]‘[t - T(m)]. This nonlinear
least-squares problem is solved by the Gauss -Newton method
which linearizes expression (2) about a current m, to obtain
the linear least-squares problem
min IIb - J&m 11. (3 )
where b = t - T(m,) is the vector of traveltime residuals, and
d is the Jacobian matrix containing the derivatives
_?Ti7Ji, - I Illcinj. i-:, 2, . . . . N;j= :, 2, ___ ) w. (4
Then the current m,. is iteratively corrected by an amoun t Sm
solved from equa tion (3). In general, the approxim ation of
equation (3) to equation (2) is only valid for a small Sm. In
practice, however, the Sm solved from equation (3) may be
large, or even unbounded, due to the fact that the matrix J
may be singular or nearly singular (e.g.. Jupp and VozofT,
197 5; Aki et al., 19 77). To stabilize the iteration, it is necessary
to solve equation (3) subject to 11m // 5 A. Here A is a posi-
tive number and delines the radius of a model-trust region inwhich one can trust the local linear model b - JSm in equa-
tion (3) to approximate the nonlinear fun ction t - T(m) ad-
equately in eq uation (2). Thu s the inverse problem is finally
reduced to solving iteratively the constrained, linear least-
squares problem:
min (11 - JSm 11 11m 11 A) . (5 )
It is clear from equation (5 ) that the implementation of the
inverse problem involves two fun dame ntal steps: finding for-
mulas for computing T(m) and J based on the previously
described velocity model and then from the resulting J, and b
solving for the correction vector Sm which satisfies
11m 11 A. The first step is accomplished (shown next) by ray
tracing.
Chmputathr af iraveltimes and- he Jacobian- matrix
A shooting method similar to those described by Cerven$ et
al. (1977) and Julian and Gubbins (1977) is used here for
tracing a ray between two specified points. This method in-
volves repetitively tracing a ray from a source point (0 in
Figure I) with a trial takeoff angle PO , and employing a pro-
cedure for adjusting that angle until the distance between the
receiver (E in Figure I) and the end point of a trial ray is
smaller than a given tolerance. To trace a ray through themedium , a fourth-order Runge -Kutta integration routine is
used to solve the 2-D ray equations (e.g., cervenjl et al., 1977 ).
If only triangular elements are used in the finite-element
model, then there is a simple analytic solution for the ray
equations within each element and the Runge -Kutta routine
can be replaced by a more efficient ray-tracing routine similar
to that used by Miiller (1984 ). The proced ure for adjusting
takeoff angles involves solving a nonlinear e quation,
X = X(Po), (6 )
where X is the distance between 0 and the end point of a ray
starting from 0. Equation (6) is iteratively solved by the
secant method (Dennis and Schnabel, 1983):
where X, is the distance between 0 and E.
Assume that the ray OE in Figure 1 corresponds to the ith
observation and is divided into R(i) segments. Then the travel-
time along this ray is computed by
(7 )
where As, is the length of kth ray segm ent and v(k - 1) and
a(k) are the velocities at the end points of this~ ay segm ent
(Figure 1).
Com bining equations (1), (4), and (7) yields the formula for
compu ting the derivatives of the traveltime with respect to the
node velocities :
_,,= _; yAsk ’ iiu(k- )
k=, u2(k 1) av j
I 1 W )?(k) aoj 1 (8
i= 1,2,..., N; j=l,2 ,..., P,
where P is the total number of the node velocities. There is noanalytic formula such as equation (8) for the derivatives of the
traveltime with respect to the interface parameters. These de-
rivatives are compu ted by a finite-difference approxim ation
(Lines et al., 1984),
J__ _ a’& __T(m’ aj + Aaj) - T(m’ uj)1, iiccj Aa j
(9 )
i = 1, 2, __., N; j= P+ 1, P+2 ,..., M,
where Aaj is the perturbation of the jth interface param eter aj,
and m’ represents the remaining unchanged model parameters.
So far, we have obtained the basic comp utational formulas
for the traveltimes, equation (7), and the Jacobian matrix,
equations (8) and (9). Now we can proceed to solve the con-strained least-squares problem in equation (5 ).
SOCUTIUN OF THE CONSTRAINED
LINEAR LEAST-SQUARES PROBLEM
The solution of equation (5) can be obtained by using either
the SVT m ethod or the L-M method. Both methods are im-
plemented he re by using singular value decompo sition (SVD ).
The SV D of J is (Lanczos, 1961 )
J = UQy,
where u and v are N x M and M x M matrices withUTU = VTV = VVT = 1__ __ __ -M 1 and b is an M x M diagonal
matrix containing the singular values
an d
hpi, -h,,,=,..=h,=O.
Here p is the rank of a. Without considering the constraint of
11m 11 A, the generalized inverse solution of equation (5) is

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 4/14
40 Zhu and Brown
where 4’ is a diagonal matrix with A,; = l/hi if hi > 0,
A:, = 0; otherwise, Vj is thejth column of v and
g = yTb. (13)
In practice, some nonzero singular values can be very small
(e.g., Jupp and Vozoff, 1975) and can cause solution (12 ) to
increase and e xceed the limit in which the linear model is
valid. To stabilize the solution, the SVT method reduces the
sire of 6m by eliminating the terms associated with smallsingular values from the summation in equation (12) while the
I--M method ac hieves this by modifying I/h, to h,/(hj -t p)
with a damping factor u > 0.
1,-M method with the mode l-trust region approach
Impleme ntation of the L-M method described here is simi-
lar to the implemen tation d escribed in More (197 7) and
Dennis and Schnabel (1983). However, instead of QR and
Cholesky decompositions, we have used the more robust SVD
in this study. The extra computing time involved in the SVD
is marginal compared to the overhead of the rest of the pro-
gram and is more than compensated by the extra information
prov>ided.With equations (10) and (13) the solution of equa-tion (5) can be written as
general. p approaches unity when the agreement is good and
becomes smaller as the agreement becomes poorer. In the case
wrhere I(b( +) > I)b // (i.e., the inversion diverges), p < 0
(More, 1977). To ensure a reasonable convergence rate, we
follow Dennis and Schnabel(l983) and accept a solution when
p 2 0.000 1; otherwise we reduce A to its half-value and
repeat the current iteration. When a current solution is accept-
ed, A is updated for the next iteration using a scheme adopted
from More (1977) and Dennis and Schnabel (1983). The basicidea is that we take a large step in correcting the parameter
vector when p is large, otherwise we decrease A (hence increas-
ing u) to stabilize the solution. Thus , for large p (> 0.9) we
save the current solution 6m and recompute equations (14)
and (15) with an increased A = 2 11m 11o obtain a new solu-
tion If the ratio p associated with the new solution is less than
0.00 0 1. we drop back to the earlier solution a nd proceed to
the next iteration with the updated A = 2 (( m 11; ut if the
ratio p is again larger than 0.9, we may repeat the procedure.
This a pproach reduces the numbe r of iterations by fully u tiliz-
ing the current linear model and thus saving computer time
For 0.000 1 c: p i 0.9, we update A as follows: A = 11m 11f
p > 0.25, A = t311m 11f p < 0.25. The quantity 9 is computed
by the formula
8 = u/ ‘(I Ibi+) II2 IIb I I2+ 2-r),6m(p) = v(.A’ + ~1)~ ‘Qg. (14)
When u = 0 and 11m(O)” I A, the solution of equation (5) is
Sm(0). Otherwise, there is a unique u determined from the
equation
+(cl) = II 6W) II - A = 0, (15)
and its corresponding 6m(p) is the solution of equation (5).
In practice, it is not necess ary to solve equa tion (15)
exactly; instead we only require that 6m satisfy
0.75A < //Fm(p) /I < 1.5A. In this case, a satisfactory p c an
easily be obtained by the iteration (Dennis and Schnabel,
1983, p. 134-l 3 6)
where y = 11&m II2 + p 118m/’ (More, 1977). If 0 is outside of
the interval CO.2, .61, we replace 0 by the closer end point of
this interval. To assure convergence and efficiency of the algo -
rithm. we also adopted or modified some other techniques
described by Marc (1977) and Dennis and Schnabel (1983),
including computing upper and lower bounds on p and using
a parameter weighting matrix in equation (5). The latter is also
used in the SVT method discussednext.
The ‘+‘VT me tho d
P- I = pk (11m@ ) ~~,/A)& I~)/$‘($),
where the derivative is computed by
The controlling effect of u on the inversion results has been
discussedby various investigators (e.g., Jupp and VozoK, 197 5;
Crosson, 1976; Haw ley et al.. 1 981). The choice of p depends
upon the problem considered. An optima l u. which shou ld be
as small as possible to achieve the maximum resolution and
convergence rate yet large enough to stabilize the solution,
also varies from iteration to iteration. An effective algorithmfor selecting I_Ihas recently been developed by More (1977)
and Dennis and Schnabel (1983) and is adopted here. This
algorithm. known as the model-trust region approach, at-
tempts to find an optimal p through equation (15) by varying
A in each iteration. The A for the next iteration is estimated
based on the size of the current solution and the ratio between
the actual reduction in 11 11 nd the reduction predicted by
the !ocal !inear mode! in equation (5) is
Since it is not necessary o satisfy the constraint in equation
(5) exactly, we can also use the SVT method. To accomplish
this. we only need to select a large enough cutoff value and
eliminate from the summ ation (12) the terms associated with
the singular values smaller than the cutoff value , such that the
norm of the resulting solution is closest to b ut sm aller than A.
Lawson and Hanson (1974) describe the procedure. which
selects a cutoff value by inspection and req uires no extra func-
tion ev aluation for c ompu ting a criterion such as p in the last
section. We comp uted a series of candidate so lutions Sm k by
using each singular value A, as the cutoff value in equation
(12):
6mk = 6m km’ + V,g ,:‘h,, k= 1,2 )..., p,
where 6m” = 0. At the same time the norm of each solution11mk // and the asso ciated residual norm rli are also compu ted
by using the formulas
1Ii2
11mk-’ I I2 + (qk/hk)2 ,
an d
P = ( II h I I’ - II b(+) II%ll b ,,2 - II b - Jh 112),,
where b( + ) = t - T(m + 6m). The ratio p measures the agree- where (r’)’ = g”g. By comparing these computed quantities,
ment between the linear model and the nonlinear function. In we select an accep table solution by req uiring that its norm be

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 5/14
Velocity Inversion and Seismograms 41
smaller than an a priori limit (an estimated magnitude of
6m 11)and the associated residual norm must be acceptably
small. In practice, we found that an acceptable solution can
often be located based on the structure of the singular values.
For a nearly singular Jacobian matrix, some of the later singu-
!ar values~are significant!y smaller than the ear!ier ones in
equation (I I), and small values are often separated from large
values by a distinct “cliff,” as observed by Jupp and Vozoff
(1975). It is natural to choose a cutoff value to eliminate these
small sing ular valu es because they cau se the solution to be
large and unstable, while contributing little to reducing the
residual norm (Ju pp and Vozoff, 197 5). A further che ck for the
selected solution is provided by the diagonal elements of the
resolution matrix and standard deviations computed for each
candidate solution, as discussed by W iggins (1972).
COMPUTATION OF SYXTHETIC SEISMOGRAMS
The algorithm used here for computing s ynthetic seismo-
grams for a velocity model is based on asymptotic ray theory.
Although this method cannot model certain types-of signals,
e.g., diffractions and c austics, it is simple a nd ha s proven ap-
plicable in a wide range of velocity structures. The principlesand limitations of asymptotic ray theory have been described
in detail by various authors (e.g., cerven$ and Ravindra , 197 1;
C‘ervenp et al., 1 977 ); here we concentrate on the formu las
relevant to comp utation of ray amplitudes. According to
cervenjr and R avindra (1971). the amplitude A(E) at the end
point E of the reflected ray OE (Figure 1) is related to the
initial amp litude A (0) at the source point 0 by
where H, is the incident point of the ray at the Ith interface
an d R, is its transmission (reflection) coefficient computed by
using the routine of Young and B raile (1976). The velocity
r(H,) and density p(H,) are evaluated on the side of the inci-
dent ray, while d(H,) an d p’H,) are on the side of the emerg-
ent ray. The geometric spreading L in equation (16) is given by
J(E)
[ 1:2 iv
L= 7
sm PO,pos o,/cosq’” (17)
where 0, and 0; are, respectively, the angles of incidence and
emergence at H,. Following Marks (1980), the Jacobian J(E)
in equation (17) is given by
J(E ) = cos P(E ) (?X/ (‘p,) (+:‘?a,) . (18)
P(E) is the angle between the ray an d the z-axis at E, X the
distance between 0 and E, y the out-of-plane coordinate, an d
a0 the takeoff angle of the ray measured from the x-z plane.Computing J(E) is a key step in generating an asymptotic
seismogram . In o ur algorithm, ‘:X,/C;&, is approxim ated by the
difference AX/A&, compu ted by using two rays with their end
points close to E. The derivative r3Ja/Oa,,s related to the width
of the ray tube in the out-of-plane direction and calcu lated by
a formula derived from the ray equations (see the Appendix)
where p is the angle between the ray and the z-axis and S the
length of ray O E. It is clear from eq uation (1 9) that ay/da, =
X when i%/?x = 0. Formula (19) is applicable to 2-D media
with arbitrary, smooth velocity distributions. A similar ap-
proach for computing L7y/Sa, was also employed by Marks
(1980) and Spence et al. (1984). Their approach. how ever, is
limited to the velocity model consisting of blocks with con-
stant velocity gradient. With the algorithm described here, the
raysamplitude in eeqqltiion~16) can_ a.sily he computed, along
with traveltimes, at minor additional cost. Neither incon-
venient out-of-plane ray tracing nor time-consum ing “dynam-
ic ray tracing” is needed. In the latter app roach, ra y ampli-
tudes are calculated by solving a set of differential equations
in addition to the ray equations (e.g., Cerven? et al., 1977 ).
After the amplitudes for all desired reflections arriving at a
particular receiver are calculated, a seismic trace is generated
in which each arrival is represented by an impulse proportion-
al to its amplitude. Convo lution of the seismic traces with an
appropriate apparen t wavelet produces the final seismogram.
ln the case where an a rrival is phase-shifted due to internal
caustics and/or complex reflection coefficients, the wavelet is
replaced by a linear combination of the wavelet with its Hil-
bert transformation (cervcny and Ravindra, 197 1).
NUMERICAL TESTS
Num erical tests on synthetic data hav e been undertak en to
study the abilities and limitations of our inversion scheme.
Results from two tests are presented. The first test was pri-
marily designed to examine the capability of the inversion
scheme in recovering laterally varying velocity structure, while
the second studied the effects of noise and the maximum
source-receiver offset (recording aperture) on the accuracy and
stability of inversion.
Test 1
The velocity model u sed to generate the synthetic data in
this test is shown in Figure 2a. The node velocities linearly
increase vertically as well as laterally. A s ynthetic seismogramfor this model is shown in Figure 2b. The CPU time for
calculating ray am plitudes is about 5 s on an SEL 32,/77. In
comp uting this seismogram, we have assum ed that the half-
space P-wave velocity is 6.5 km/s. Th e S-wave velocities and
densities used in equation (16) were computed from P-wave
velocity v by v,~ v/d and p = 0.252 + 0.378 80, respectively
(Birch, 1964 ). Note that in spite of a smaller impedance con-
trast due to the lateral velocity increase of layer 2, the ampli-
tude of the wide-angle reflection from the lower interface at
trace 10 is still considerably larger th an the o thers. The large-
amplitude, wide-angle reflections from the upper interface
start at trace 5. The phase shift of wide-angle reflections is due
to complex reflection coefficients.
The traveltimes us ed for inversion were directly calcu lated
from the velocity model. 200 reflection arrivals were computed
with about 15 km recording ape rture, and then noise, in the
form of random traveltime delays with 5 ms standard d evi-
ation, was added to these data. Tw o separate inversions were
made from the synthetic traveltime data, and the resulting
model parameters, along with the initial models, are shown in
Figures 3 and 4, respectively. While only no de velocities were
calculated in Figure 3, both node velocities and the depth and
dip of the lower interface were calculated in Figure 4. In both
cases, the rms residuals were reduc ed to the level of the noise
(defined here as the standard deviation of the random travel-
time delays) after three to five iterations. E xcellent results were

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 6/14
Zhu and Brown
A DISTANCE (km)
0 0 16
2.0 2.64 3.282
6
6 DISTANCE (km)
0 3 6 9 12 15
III I ISOURCE
Ll
TRACE 2 4 6 0 lb
FIG. ? . (a) Two-layer velocity model used in test 1 . The numb ers shown on the corners of the elements are the nodevelocities. (b) A synthetic seismogram from the velocity mo del.
A DISTANCE (km1 B DISTANCE (km)
0 8 16 0 8 16
3.0 3.0 3.0 20 0 2.65 3.29
(50.0) (13.6) (8.5) (0.0) (0.41 (0.3)
(35.7) (IO.51 (6.9)
2 4 3.8 3.8 38
- 4.8 4.6 4.8
= (26.31 (8.1) (5.5)
aw (4.7)
D 5.68
+
C DISTANCE (km)0 8 16
c1.97 2.64 3.32
(I.51 (0.01 (1.2)
i 4;;;
(0.3) (0.7)3.45 4.04
4.43 5.09
z (0.3) (0.2) (0.2)
w”n
(0.2)
IO
1
FIG. 3. Inversion results when only the node velocities were estimated from the synthetic data of the velocity model inFigure 2 . (a) The initial model. (b) and (c) The final m odels estimated by the L-M method and the SVT methodrespectively. The numbe rs inside parentheses ndicate the percent differences between estimated parameters and actualvalues.

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 7/14
Vi3locity hversibn and Seismograms
obtained by both L-M and SVT methods, except for the re-
sults shown in Figure 4c which have larger differences from
their actual values than those in Figure 4b. The SVT method,
however, does not require extra function evaluation for
choosing cutoff values, and was found very useful when only
node velocities are to be determined from the data (see, for
example, Figure 3~).
For comparison, we also computed the model parameters
by using the L-M method with a fixed u selected through a
trial-and-error process (Crosson, 1 976). The results show thatthis conventional L-M method is less effective than either the
SVT method or the improved L-M method used in this study.
For example, the maximum differences between actual node
velocities and those produced by the conventional L-M
method after five iterations for the cases n Figures 3 and 4 are
respectively about 5 percent and 8 percent, which are larger
than those shown in Figures 3b, 3c, and 4c (about 2 percent).
In addition to its strong convergence properties, the improved
L-M method is simple to use because it is no longer necessary
to choose an initial u by empirical trials as is required by the
conventional L-M method.
To estimate the reliability of an obtained so lution, the diag-
onal elements of the resolution matrix and standard devi-
ations for the solution were computed in this study using the
formula given by Wiggins (1972) and Aki et al. (1977). The
diagonais of the resoiurion matrices for the estimates shown in
Figures 3 and 4 are generally large (most of them are larger
A DISTANCE (km)
0 8
3.0 3.0
(50.0) (13.6)
(35.71 (10.5)
4 3.8 3.84.8 4.8
(26.3) (8.11
(20.0) (9.5)
8 6.0 6.0
16
3.0
(8.51
(6.9)
3.84.8
(5.51
(0.7)
6.0
C DISTANCE (km)
0 8
1.97 2.64
( 1.5) (0.0)
(1.41 (0.0)4 284 3.44
3.51 4.17
(7.61 (6 . I)
16*
3.30
(0.61
(0.5)4.064.96
12.41
than 0.7), indicating that these estimates are reasonably re-
solved. In general, this is also true for the rest of the numerical
examples presented. The standard deviations for the estimates
are small (e.g., the maxim um for the estimated node velocities
in Fig ure 4 is 3.2 percent) because of the small amoun t of
noise and large recording aperture used.
Test 2
Data for our inversion schem e were taken from deep reflec-tion results recorded with surface sources and receivers. With
such data, the stability of an inversion and the uncertainty of
estimated m odel pa rameters are sensitive to the recording ap-
erture used. The sensitivity must be ana lyzed (see, e.g., Limond
and Patriat, 1975 ); here we study this sensitivity numerically,
as well as the effect of noise in the data, by using a constant-
velocity layer model shown in Figure 5 a. Although simple, this
model is particularly useful for sma ll-aperture data. A series of
traveltime data sets was generated from this velocity model by
simulating different recording apertures, including 2.5, 5, and
10 km (IO km is now commonly used in COCO RP field sur-
veys, for exa mple). E ach set consists of 60 reflection arrivals to
which noise was added in the form of random traveltime
delays with varying standard deviations (5, 10, and 20 ms).
From these data, the velocities of all three layers and the dips
Andydepths of interfaces 2 and 3 were then calculated. All
calculations started with the initial model shown in Figure 5b,
B DISTANCE (km)
0 8 16
1.97 2.65 3.32
11.5) (0.4 1 (I.21
-Z
(2.1) (0.3) (1.0)
r 4 ‘;8”7” 345 4.044.52 5.21
: (1.81 (I.81 (2.5)
Eln (1.71
FIG. 4. Inversion results when the dip and depth of the lower interface as well as the node velocities were estimatedfrom the synthetic data of the velocity mo del in Figu re 2. (a) The flat-layered initial model. (b) and (c) The final modelsfrom the L-M method and the SVT method, respectively.

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 8/14
44 Zhu and Brown
an d the rms residuals were reduced to the level of noise after
three iterations.
The resulting velocity profiles are shown in Figure 6, and
the standard deviations for the estimated parameters are listed
in Ta ble 1. It is clear from these results that the effect of noise
on the accuracy of estimated parameters is largely controlled
by the ratio of the recording aperture to interface depth (A,/D).
With the 10 km aperture, the increase in noise causes only a
small increase in the errors in the estimated param eters, and
good results were obtained even when the noise level is high.
For example, the difference between the actual vj and that
estimated with 20 ms noise is 2.6 percent, and the correspond-
Ao’STANzE (km)
B0 10 0 D’STAN:E (lcrn) 10
ing standqrd d eviation is 0.17 km /s (3.4 percent) (Table 1). In
contrast, for the 5 km aperture, the errors were largely ampli-
fied, particularly for the parameters associated with the d eep
layers. The difference between the actual V, and that estimated
from data with 20 ms noise is now 14.4 percent, and the
standard deviation is 0.90 km/s (18 percent). Comparing the
results in Figures 6a and 6 b as well as their s tandard devi-
ations (Table 1) shows that the am plification of the param eter
errors due to the reduction of A/D also increases with the
depth o f a layer (defined as the depth to the lower interface).
While reducing the aperture from 10 to 5 km only slightly
increased the error in the estim ated VI, the increase in the
errors of the parameters of layers 2 and 3 due to such re-
duction is mu& iarm This indicates ihat A,0 is a critical
parameter in deep reflection surveys, especially for those de-
signed for m apping subsurface velocities. This is, of course, an
expression of the well-known fact that large offsets tend to
improve velocity resolution.
The num erical results from this test also confirm that small
recording aperture and noisy data can make an inversion un-
stable. All results in Figu res 6a and 6b were obtained by the
classical least-squares procedure (i.e., the L-M method with
u = 0). This p rocedure, however, diverged for the data w iththe 2.5 km aperture. The results in Figure 6c were obtained by
the SVT method which also failed to converge for the data
with 20 ms noise. The derivatives of traveltimes with respect
to the parameters of a deep layer approach zero when A/D is
small (e.g., Lines et al., 198 4). This corresponds to the cas e
“1 -4,o(km/a)INTERFACEi z7-F
FIG. 5 . (a) The ve locity mod el, and (b) the initial model used in
C
test 2.
A
4 6
1
Iiiiiii Dl =0.02
i D2~0.04
D3=0.06.-.-.-. -51
:iii.:I
Dl=0.15 ,i
D2~0.13 _i
D3~0.11 _JL._.-
B
VELOCITY (km/s)
d
2 4 60 0
4 4
8
E
8
12
8 8
-.._.
12
r
fi
i!
:I.
i!
t !:! D1=0.06
:I D2=0.11
ii D3~0.40. . . .
L.-.-.-..
II
16 16 i 16
Dl= 0.89
D2= 0.25
- TRUE VALUE. . . . , . WITH 10 ms NOISE
-- - WITH 5 ms NOISE -‘-‘- WITH 20 ms NOISE
FIG. 6. The estimated velocity profiles at the zero distance in Figure 5: (a) from 10 km, (b) from 5 km, and (c) from 2.5km aperture data. Som e velocity profiles, such as that es timated from data with 5 ms noise in (a), are too close to thetrue value to be shown. Dl, D2, and D 3 indicate the differences (in degree) between the true dips and those estimatedfrom the data w ith 5, 10, and 2 0 ms noise, respectively.

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 9/14
Velocity Inversion and Seismograms 45
where the matrix J, in equation (5) is nearly singular. In this
case, as indicated by eq uation (12) the small singular values of
J will largely am plify the noise and cau se the solution to
become large and unstable. In general, the stability of an in-
version also depends upon the velocity structure involved. For
example, in spite of the fact that a small amount of noise and
a large A/D ratio were used in test 1, nonzero damping factors
were required in order to stabilize the iterations. The SVT or
L-M method was also used in the real data examples present-
ed below. Thus, an acceptable A/D for a particular case de-
pends upon the noise level and required accuracy as well as on
the velocity structure involved. In this example, if the veloci-
ties are required to be accurate to within 5 percent, then the
acceptable A/D for the data w ith 10 ms noise is about 0.5.
REAL DATA EXAMPLES
The present inversion scheme was applied to different types
of COCO RP deep reflection data to provide subsurface veloc-
ities for seismic interpretation. Presented here are examples
from COC ORP experiments in Michigan (Zhu and Brown,
1986) and Utah (Liu et al., 1986). Data used in both examples
have been extensively processed in order to increase thesignal-to-noise (S/N) ratio and data resolution. As a result,
traveltimes can be more accurately picked on the field records.
Unfortunately, such processing also destroyed the true-
amplitude relations of the data; hence no attempt was made
to compu te synthetic seismograms. Howe ver, deep reflections
with unusually strong amplitudes have been observed on
various sites (e.g., De Voogd et al., 1986 ). In these cases, syn-
thetic seismogram s could be u seful, for exam ple, in ded ucing
reflectivity of an interface.
Example 1
The data in this example were collected by COCOR P in
central Michigan near the McClure-Sparks no. 1-8 deep wellwith a recording aperture of about 7 km (Zhu and Brown,
1986 ). Two field records close to the dee p well were used in
the calculation; one is shown in Figure 7. Five reflections on
these records were selected (Figure 7) because they corresp ond
to reflectors separating seismic sequences identified on the
6
0 2 4 6
OFFSET (km)
FIG. 7. A field record from CO COR P Michigan surveys andfive reflections (dotted curves) used in the inversion. The re-flections were selected based on the seismic units identified onstacked sections (Zhu and Brown. 1986).
Table 1. Standard deviations for the parameters estimated in test 2.
Recording DataStandard deviation
aperture noise Layer velocity (km/s) Dip (degree) Depth (km)
(km) (ms)Y V2 V3 a2 a3 b2 b3
I-
1;
e;co~ fi;c+ OJ3~ 0104 O:t'r OIB 0.04
10 0.00 0.02 0.08 0.08 0.22 0.05 0.09
20 0.01 0.04 0.17 0.18 0.45 0.13 0.19
5 0.00 0.04 0.20 0.08 0.40 0.12 0.19
5 10 0.01 0.09 0.39 0.16 0.86 0.25 0.30
20 0.02 0.20 0.90 0.34 1.80 0.55 0.90
2.5 5 0.00 0.10 0.13 0.20 0.50 0.28 0.10
10 0.20 0.28 0.03 0.40 0.94 0.57 0.20

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 10/14
stacked sections Zhu and Brown, 1986). Traveltimes along
these reflections were then visually picked and digitized. The
accuracy of such picks depends upon the ability to identify
and c orrelate individual reflections on a record by sight. In
this example, reflections B to E can be clearly identified. The
deep reflection F , however, is less certain du e to the lower S/N
ratio. Trav eltime picks for this reflection were guided by a
smooth curve connecting the correlatable reflection segments.
The resulting velocities and depths, as well as their standard
deviations, are shown in Table 2. No significant dips were
detected. As expected, the uncertainties of the estimated pa-
rameters increase as the A/D decreases with the depth o f the
layers (Table 2).
For comparison, Table 2 also lists the results obtained with
the conventional method (Zhu and Brown, 1986). This method
estimates the interval velocities from stacking velocities by
using the Dix equation. Th e s tacking velocities were deter-
mined b y the velocity semblance technique (Taner a nd Koeh-
ler, 1969).
The resulting interval velocities and depths from these two
. .
*;;‘... ‘‘..:E. . . . . . . .
. .
%ic4 . . . . 1.. . . . . . . . .,
46 Zhu and Brown
different approaches agree reasonably well for some intervals,
but not so well for others. Higher interval velocities below
layer B derived from the stacking velocities (Table 2) may be
due at least in part to the known bias between stacking and
rms velocities, which leads to e rroneously high interval veloci-
ties (Taner and Koehler, 1969; Al-Chalabi, 1974). Traveltime
curves for both velocity models were computed and compared
to the actual traveltime picks in Figure 8. It is evident that the
velocity model estimated by the new method fits the observed
traveltimes better than the model from the conventional
method.
The resultant velocity model is consistent with the data
from the deep well and the structure imaged by the stacked
seismic sections. For examp le, the flat-layer structure indicated
by the velocity model was also imaged by the stacked sections
near the deep well (Zhu and Brown, 1986), and the calculated
depth of the lower interface of layer B matches the thickness
of Paleozoic rocks from the deep well, which penetrated about
3.7 km of Paleozoic section and 1.6 km of underlying Precam-
brian rocks (Sleep and Sloss, 1978). Based on the velocity
model, the lithologies encountered in the deep well, the seismic
character of the stacked sections, and the regional g eology, an
interpretive stratigraph ic section (Table 2 from Zhu andBrown. 1986) was constructed which provides a useful con-
straint on the seismic interpretation of the deep structures
beneath the Michigan basin (Zhu and Brown, 1986).
Example 2
FIG. 8. Comparison between the traveltimes picked from theCOC ORP Michigan d ata (dotted curves) and calculatedtraveltimes (solid curves) (a) from the con ventional method,and (b) from the new inversion scheme.
In order to improve subsurface velocity estimates by in-
creasing A/D, COCO RP sometimes also records expanding
spread profiles (ESP) on selected sites (Liu et al., 198 6). One
such ESP was recorded in the Sevier Desert of west-central
Utah, where COCO RP Utah line 1 clearly imaged a shallow,
low-angle normal fault, the Sevier Desert detachment, and a
relatively prom inent dee p reflector interpreted as the Moho
(Allmendinger et al., 1983). The maximum recording aperture
in this survey is about 32 km, or three times normal (Liu et al.,
198 6). The traveltime-offset display of the ESP data an d the
picked reflections are shown in Figure 9. Similar to example 1,
the uncertainty involved in visually picking traveltimes for
reflection E is also considerably larger than the uncertainty for
Table 2. Velocity m odels from Michigan data and the interpreted stratigraphy. Velocity and depth for the layer A wereestimated from first refractions Zhu and Brown, 1986).
Conventional Standard deviation Interpreted
method New method of the new method stratigraphy
Velocity Depth Velocity Depth Velocity Depth
Layer (km/s) (km) (km/s) (km) (km/s) (km)-------
A 2.30 0.13 2.30 0.13 Surface
low-velocity layer
6 5.31 3.49 5.62 3.72 0.01 0.01 Paleozoic
C 5.56 5.35 5.46 5.55 0.05 0.02 Upper Keweenawan
D 5.83 7.47 5.29 7.47 0.08 0.03 elastics
E 6.15 11.30 5.71 11.02 0.09 0.05 Middle Keweenawan
F 6.59 18.00 5.94 17.06 0.12 0.11 volcanic sequence

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 11/14
Velocity Inversion and Seismograms 47
the shallow reflections, especially beyond 23 km.
Originally, the data were analyzed by assuming a horizon-
tally homogeneous medium, and the analysis included the
methods used in test 1 and Al-Ch alabi’s shifting-stack tech-
nique, which attempts to remove bias from stacking velocities
(Al-Chalabi. 197 4). The stack ing velocities used in the conven-
tional method for this example were determined by the
7‘* - X 2 technique (Dix. 195 5; Al-Chalabi, 1974 ). The re-
sulting velocities and depths, as well as their standard devi-
ations, are listed in Table 3 . The traveltime curves compu tedfrom these velocity models are compared to the observed
traveltimes in Figure 10. Again, the interval velocities deter-
mined by the conventional method are higher than those de-
termined by the other two methods, and they lead to large
discrepancies between the calculated and observed traveltimes
(Figure 1Oa).
Although the results from both the shifting-stack metho d
and ou r inversion schem e agree well with the observations for
the shallow layers. there is a large mismatch at the deepest
reflection for all the velocity models in Table 3. This mismatch
may be due to inadequate representation of the crustal struc-
ture by a 1-D model (Liu et al.. 198 6). Thus. the computation
was repeated by us ing the new inversion sch eme with a 2-Dmodel sho wn in Figure lla. Becaus e the velocities and depths
derived from I-D inversion are satisfactory for four shallow
layers. the model parameters for the upper eight elements were
fixed to be identical with those results. Only the node veloci-
ties of the two lowest elements and the depth of the lowest
interface were allowed to vary, and the resulting estimates and
their standard deviations are shown in Figure 1 a. The travel-
times calculated from the final model are now in excellent
agreeme nt with the observations (Figure lib), and the stan-
dard deviations of the estimates are also smaller than those for
the velocity and depth of the lowest layer shown in Table 3. In
this final model, velocities in the lower crust increase slowly
from south to no rth, as indicated by the node velocities in
Figure 1 a. Howev er, note that the node velocities at eitherend of the profile are significant only for interpolating velocity
values for the shaded portion of the crust where the seismic
rays have actually sampled the subsurface.
CONCL<USIONS AND DISCUSSION
We have presented a new technique for determining subsur-
face velocities from deep reflection data. Becaus e it uses a
finite-element model, this technique is simple but flexible and
can accommo date nonhorizontal interfaces as well as lateral
velocity variations. We also include an algorithm for calculat-
ing synthetic seismograms of a 2-D medium . This algorithm is
efficient ar..i subject only to the limitations of asymptotic ray
theory. Th us, the routine provides a useful tool for seismic
interpreters to model the velocity structure as well as the am-
plitude and phase response of any 2-D media with smooth
layer velocities.
The inverse problem was explicitly form ulated as an itera-
tive, constrained, linear least-squares problem. Two effective
methods. the SVT method and the improved L-M method,
-- *0 1’0 2'0
SHOT-RECEIVER OFFSET (km)
FIG. 9. COCO RP Utah ESP data and five reflections (dottedcurves) used in the inversion. Reflection A is from a basaltlayer, reflection D is from the Sevier Desert detachment, andreflection E is interpreted as the Moho reflection. Thequestion m ark indicates that reflection E is less certain be yond23 km.
Table 3. Homogeneous layered velocity models from Utah data.
Conventional Shifting stack Standard deviation
method method New method of the new method
Velocity Depth Velocity Depth Velocity Depth
Layer (km/s) (km)
Velocity Depth
(km/s) (km) (km/s) (km) (km/s) (km)--- --- --
A 2.15 1.05 2.15 1.05 2.1 1 1.05 0.01 0.00
B 4.30 2.38 3.65 2.19 3.54 2.15 0.02 0.01
C 5.15 3.67 4.84 3.39 4.82 3.40 0.03 0.01
D 6.26 5.36 5.06 4.76 5.18 4.75 0.03 0.01
E 7.83 38.87 6.21 31.32 6.21 31.18 0.43 0.59

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 12/14
48 Zhu and Brown
were used to solve this problem. The L-M method w as imple-
mented with the model-trust region approach. This improved
L-M method is robust and has strong convergence properties.
Also, although the SVT method is less effective than the L-M
method for simultaneously determining node velocities and
interface parameters. it is useful when on ly node velocities are
to be determined.
Experiments with synthetic data indicated that accurate ve-
locity and interface geome tries can be determined with our
inversion scheme, providing the traveltime picks are accura te
and/or recording aperture is sufficiently large. Based on ou r
experiences, accura te reflection arrivals can be picked from
data when the S/N ratio is high. For the noisy data, large
uncertainties may be involved in such picks. Theoretically, we
may improve the inversion results for noisy data by increasing
the recording aperture . In practice, however, such improve-
ment is limited due to the fact that the S/N ratio also de-
creases as the recording aperture increases, and 2-D and 3-D
variations become more significant.
Computations with real data suggest that while a simple
A
0 z a 8
---Observed
-Calculated
w9
2E
12
t
-‘-.------W
15VOFFSET (km)
B
I50 IO 20 30
OFFSET (km)
C
15WOFFSET (km)
FIG. 10. Com parison of the traveltimes picked from ESP d ata (dotted cu rves) and calcu lated traveltimes (solid curves)(a) from the conventional methodd,~(b)rom shifting-stack method, and (c) from the new inversion scheme using a 1-Dmodel.
A FINITE-ELEMENT MODEL
0.mt 05
2.153.40
4.75
B 0~. -Observed
-Calculated
3
OFFSET (KM)
FIG. 11. ESP velocity results from the new inversion scheme using a 2-D model. (a) Velocity structu re determined bythe inversion. Shaded area indicates the portion of the crust where seismic rays have actually sam pled the subsurface.The numbe rs shown in the center of the eight upper elem ents indicate the velocities (km/s) of the elements. Thenumb ers in the corne r of the two lowest elements are nod al velocities, and numb ers inside parentheses are theirstandard d eviations (km/s). (b) Com parison between the observed traveltimes (dotted curv es) and the calcu latedtraveltimes (solid curves) from the 2-D model.

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 13/14
Velocity Inversion and Seismograms 49
constant-velocity layer model is useful for data with a small
recording aperture, the heterogeneity effect may be so signifi-
cant on the wide-aperture data that a 2-D, or even a 3-D,
analysis technique is necessary in order to find a realistic sub-
surface velocity structure . Although this study was limited to
2-D media, the technique can be generalized to 3-D media.
Howe ver, the computing cost involved will be correspondingly
higher. The technique can also be modified to solve a large
seismic tomograp hy problem. This modification may include
using a more efficient ray-tracing routine by limiting the ve-locity model to triangular elements and incorporating auto-
matic traveltime-picking techniques. It is also necessary to
approxim ate the interfaces by more flexible functions than for
the linear function used here. The latter is approp riate only
when the data have limited lateral extent.
ACKNOWLEDGMENTS
We tha nk Prof. J. Oliver and J. McB ride for reading the
manuscript and making valuable suggestions. We thank two
rcviewcrs for their suggested revisions to the manu script. Th e
comp utations and data processing were performed on
CO CO RP’s MEG ASE TS’” system. The field data were col-
lected by crew 683 4 of Petty-Ray Exploration Service of Geo-
source, Inc. This work was supported by National Science
Foundation grants EAR 82-12445 and EAR 8 3-13569. Insti-
tute for the Study of the Continents (IN STO C) Contribution
no. 40.
“ Seiscom Delta Inc.
REFLRENCES
Aki, K., Christoffersson. A.. and Husebye. E. S., 1977. Determination
of the three-dimensional seismic structure of the lithosphere: J.Geophys. Res.. 82. 217-296.
Al-Chalahi, M., 1974, An analysis of stacking, RMS, average. and
interval velocities over a horizontally layered ground: Geophys.
Prosp., 22,4588475.
.Allmendinger. R~.,Sharp. J., Von T&h. D., Serpa. L., Brown, L., Kauf-
man. S.. Oliver. J., and Smith, R. B., 1983, Cenozoic and Mesozoic
structure of the eastern Basin and Range from COCORP seismic
reflection data: Geology, I I, 532-536.
Birch. F. 1964, Density and composition of the mantle and core: J.
Geophys. Res., 69,437774387.
Bishop. T. N., Bube. K. P., Cutler, R. T., Langan, R. T.. Love, P. L.,
Resnick, J. R.. Shuey. R. T., Spindler, D. A., and Wyld, H. W., 1985.
Tomographic determination of velocity and depth in laterally vary-
Cing media: Geophysics. SO. 003 923.
erveny. V.. and Ravindra, R.. 1971. Theory of seismic head waves:Univ. of Toronto Press.
Cerveny, V.. Molotkov. I. A., and PSenEik. 1, 1977. Rav method inseismology: Univ. Karlova.
Crosson, R. W.. 1976, Crustal structure modeling of earthquake data,
I. Simultaneous least-squares estimation of hypocenters and veloci-
ty parameters: J. Geophys. Res.. 81, 303663046.
Dennis. J. E., Jr. and Schnabel, R. B., 1983, Numerical methods for
unconstrained optimization and nonlinear equations: Prentice-
Hall. Inc.
De Voogd, H.. Serpa, L., Brown, L., Hauser. E., Kaufman, S., Oliver,
J.. Troxel. B. W., Willemin, J.. and Wright. L. A., 1986, Death
Valley bright spot: A midcrustal magma body in the southern
Great Basin. California’?: Geology. 14, 6467.Dix, C. H., 1955, Seismic velocities from surface measurements: Geo-
physics. 20, 68 X6.
Hawley. B. W., Zandt. G.. and Smith, R. B:, 1981, Simultaneous inver-sion for hypocenters and lateral velocity variations: an iterative
solution with a layered model: J. Geophys. Res., 86. 707337080.
Julian, B. R., and Gubbins, D., 1977, Three-dimensional seismic ray
tracing: J. Geophys., 43, 95- 113.Jupp. D. L. B., and Vozolfl K., 1975. Stable iterative methods for the
inversion of geophysical data: Geophys. J. Roy. Astr. SOC.,42, 957~
976.
I,awson, c‘ I.., and Hanson, R. J., 1974, Solving least-squares prob-
lems: Prentice-Hall. Inc.
Lancros, C.. 1961. Linear difierential operators: D. Van Nostrand Co.
Levenberg. K.. 1944, A method for the solution of certain nonlinear
problems in least-squares: Quart. Appl. Math.. 2, 1644168.
Limond. W. Q., and Patriat, Ph., 1975, The accuracy of determination
of seismic interval velocities from variable angle reflection (dispos-
able sonobuoy) records: Geophys. J. Roy. Astr. Sot., 43, 9055938.
Lines, L. R.. Bourgeois. A., and Covey, J. D., 1984, Traveltime inver-
sion of offset vertical seismic profiles-A feasibility study: Geophys-
ics, 49. 2%X264.
Liu, C-S. Zhu, T., Farmer, H.. and Brown, L., 1986, An expandingspread experiment during COCORP field operations in Utah, in
BaraTangi, M., and Brown. L., Eds.. Reflection seismology and the
continental crust: a global perspective: Geodynamic series 13, Am.
Geophys. Union, 237-246.
Marks, L. W.. 1980, Computational topics in ray seismology: Ph.D.
thesis, Univ. of Alberta.
Marquardt, D. W., 1963, An algorithm for least-squares estimation of
nonlinear parameters: Sot. Industr. Appl. Math., J. Appl. Math.,11.431-441.
More, J. J., 1977, The Levenberg-Marquardt algorithm: imple-
mentation and theory, in Wotson, G. A., Ed., Numerical analysis,
Lecture notes 630: Springer-Verlag.
Miller. G., 1984, Efficient calculation of Gaussian-beam seismograms
for two-dimensional inhomogeneous media: Geophys. J. Roy. Astr.
Sot.. 79, 153+166.
Sattlegger, J., 1965, A method of computing true interval velocities
from expanding spread data in the case of arbitrary long spreads
and arbitrarily dipping plane interfaces: Geophys. Prosp., 13, 306
318.Schilt, S., Oliver, J., Brown, L., Kaufman, S., Albaugh, D.. Brewer, J.,
Cook, F., Jessen. L., Krumhansl, P., Long, G., and Steiner, D.,1979, The heterogeneity of the continental crust: results from deep
seismic reflection prohhng using the Vibroseis technique: Rev. Geo-
phys. Space Phys., 17, 354-368.
Steep, N. H.. and Sloss, L. L.. 1978, A deep borehole in the Michiganbasin: J. Geophys. Res., 83,5815-5819.
Spence. G. D:. Whittail, K. P:, and Clowes, R. M.: 1984, Practicalsynthetic seismograms for laterally varying medta calculated by
asymptotic ray theory: Bull., Seis. Sot. Am., 74, 1209Yl223.
Taner, M. T., and Koehier, F.. 1969, Velocity spectra-Digital com-
puter derivation and applications of velocity functions: Geophysics,34, 859-88 I.
Wiggins, R. A.. 1972, The general linear inverse problem: implication
of surface waves and free oscillations for earth structure: Rev. Geo-phys. Space Phys., 10,251&285.
Young. G. B., and Braile, L. W., 1976, A computer program for the
application of Zoeppritz’s amplitude equations and Knott’s energy
equations: Bull., Seis. Sot. Am., 66, 1881-1885.
Zhu. T.. and Brown, L. D., 1986,COCORP Michigan surveys: repro-cessing and results: J. Geophys. Res., in press,

8/3/2019 GPH 52 1 Zhu Dimensional Velocity
http://slidepdf.com/reader/full/gph-52-1-zhu-dimensional-velocity 14/14
50 Zhu and Brown
APPENDIX
DERIVATION OF FORMULA (19)
The ray equations for a Z-D medium w ith velocity indepen-
dent of the y-axis are
NI.+/s = sin p CDS ,
di,/ds = cos fi>
da/ds = u, sin a/([: sin p),(A-1)
an d
dp/ds = (6, sin fi - oI cos p cos a)io,
where s is the arc length along a ray, a and j3 are the azimuth
and declination of the ray, and u, and U, are the derivatives of
velocity c with respect to x and 2, respectively. The corre-
sponding ray c oordinates are (s. a,, PO), a, and PO are the
azimuth and dec lination at the source point, often referred to
as the takeoff angles. For our purp ose, we only need to con-
sider the rays with small a. Thus, the fourth equation in equa-
tions (A-l) can be written da/ds = u,a/(u sin p), which has the
solution
where
a = a0 E(s, a,, PO), (A-2)
Differentiating the second equation in equ ations (A-l) with
respect to a0 and us ing equation (A-2) yield
d i v-2
i is ?a,= sinpcosa(E +a,,g] + sinucosflg. (A-3)
Integrating equation (A-3) an d letting a, (hence a) approach
zero, we obtain formula (19):
sdJ:/cYa,= sin J3E(s,0, p,) ds.