Embed Size (px)
Citation preview
GNSS machine control with RTCM corrections from permanent networks
Guido Fastellini, Fabio Radicioni, Aurelio Stoppini, DICA, Department of Civil and Environmental Engineering,
University of Perugia
BIOGRAPHY Guido Fastellini, PhD in Civil Engineering, is a research assistant at the DICA, Perugia University, where he carries out researches on GNSS, Geodesy and Surveying. Fabio Radicioni, PhD in Geodetic and Surveying Sciences, is a full professor of Geodesy and Mapping at the Perugia University since 2002, formerly (1992 to 2002) associate professor. From 2004 to 2008 he has directed the Department of Civil and Environmental Engineering (DICA). Aurelio Stoppini, PhD in Geodetic and Surveying Sciences, is an associate professor of Geodesy and Mapping at the Perugia University since 2004, formerly (1997 to 2004) university researcher. ABSTRACT The GNSS machine control is a system of control and semi-automated guide of vehicles (bulldozers, power shovels and similar) in building sites, based on GNSS real-time positioning techniques. It permits to strongly increase a machine productivity through a shortening in the execution time and a reduction of the costs for the ground crew (in particular, the surveyors assisting the machine job). An effective machine control system requires a real-time GNSS positioning with a few centimetres accuracy. To obtain such an accuracy, the rover receiver installed on the machine obtains from a fixed receiver of known position (base station) a RTCM correction including code and phase, with the real-time positioning technique commonly referred to as RTK (Real Time Kinematic). The current organization of the GNSS-assisted machine control, even realizing a relevant
innovation with respect to the traditional man-assisted way of operating in building sites, still presents some problems and limitations: - costs for the GNSS base station; - communication problems between base station and rover on the machine, commonly based on modems, which in countries like Italy are subjected to strong power restrictions; - affordability and integrity problems for the correction data coming from one station only. The use of a networked real-time kinematic positioning system (NRTK) permits to eliminate most of the problems summarized above. The base station is no more necessary, the communication and the position solution are more stable and affordable. The paper presents an application of NRTK services to the machine control, tested in building sites covered by the permanent network GPSUMBRIA, currently operated by the DICA. The GNSS system installed on the test machines was not able to receive NRTK corrections, but only single station RTCM data through radios. Therefore, some new hardware components have been specifically set up and tested in order to send network corrections to the rovers mounted on the building machines. 1 INTRODUCTION: A RESUME OF THE
STATE OF THE ART The scientific and technological development in the surveying field has produced in the latest years a fast improvement in terms of accuracy accompanied by an equally rapid cost reduction. Such evolution has led to a transformation of the productive processes in many sectors, thanks to the combined use of different instruments and techniques. One of the most important innovations is represented by the

sensor integration for the positioning and precise navigation, giving the best results through the interaction between different instruments. This evolution has also interested the activity of building, particularly in the sector of the earth-moving machines, assisted by GNSS receivers integrated by attitude sensors. Such systems have been introduced quite recently, thus a study and testing phase is still necessary to improve their affordability and performances, considering the complexity of the building works. At the present time most companies producing positioning instruments also distribute machine control systems having specifics tailored on the custom exigencies and the accuracy to be obtained. All such systems are based on satellite positioning techniques and include one or more double-frequency GNSS receiver. Most of the systems on the market are able to receive GLONASS signals beside GPS. The GLONASS constellation is almost complete (20 operating satellites on March 2009) and its availability improves the positioning affordability in sites with natural or artificial obstructions. In the dozer type machines, the GNSS antenna is installed on the frontal blade, interposing vibration damping systems set up in different ways by the producers. Beside that, the system has to be tested at the high temperatures which can be reached during the work. To compute the transversal inclination of the blade, a second GNSS antenna or a slope sensor are mounted. Other devices like MEMS (Micro-Electro Mechanical Systems) and similar sensors are often applied to the machine control. Such instruments have many interesting characteristics: great number of produced units with consequent low cost, toughness, small size, easy installation and customisation, possibility of integration with other sensors. For example, the Topcon corporation has announced that their next control system for dozers (3D-MC2) will be equipped with a three-axes MEMS capable of a position and attitude estimation rate up to 100 Hz. Such a powerful sensor will improve the productivity of the system and assist the GNSS sensor in the case of a poor satellite coverage. A second GNSS antenna is mounted on machines turning around a vertical axis, like the excavators. They are also fitted with two- or three-axes gravitational sensors to estimate the raise or drop of the arms and the position and attitude of the bucket. The use of satellite techniques permit to reach accuracies better than 5 centimetres, but some applications (e.g. road paving) require better performances, of a few millimetre order. In such
cases laser or ultrasonic levels are installed in the building site, permitting height determinations with a subcentimetric accuracy at 360°, for distances up to 600 metres, with a vertical span of about 10°, for an unlimited number of receivers. The main element of any machine control system is the GNSS receiver (one or more) installed on the excavating machine. A differential technique with code and phase corrections is utilised to estimate the rover position, reaching accuracies equal or better than 5 cm. A fixed GNSS station is installed in or near the building site and configured to send RTK (Real Time Kinematic) corrections by means of a radio modem to all GNSS rovers operating inside the transmission range. The rovers are installed on machines or carried by human operators for tracking and control purposes. The system estimates in real time the plano-altimetric position of the rover. Other sensors, if present, can improve the height accuracy and permit the determination of other components of movement and the position and attitude of the excavating blade or bucket. All data acquired by the sensors are elaborated on a computer where the design DTM has been previously loaded. This way, the operator on the earth moving machine can visualize at any moment the difference between the actual ground surface and the design. In most cases the system is also connected to the hydraulic control device of the machine, so that the software automatically commands the movement of the boom or blade. The driver only has to control the excavation result and follow the design plot, assisted by the displayed information: machine position, excavation or filling height, ground slope, cross section, ... The introduction of the machine control has considerably improved the accuracy of the earth movements, reducing times and costs. Some advantages can be listed as follows: − the costs for survey operations in the preliminary phase and for the tracking during the excavation are completely eliminated;
− as counterpart, there is some more office work to do for the design and DTM elaboration and loading, but this is compensated by a more accurate prevision of the quantities;
− a direct transit from the design to the execution phase, eliminating all the intermediate passes with a consistent reduction on time, cost and possible errors;
− a better involvement and efficiency of the machine operator, who controls in real time on the display the project execution;
− a consistent improvement in the accuracy of the project realization, with fewer wastes of material, energy and time;
− the technicians on the building site can control the work in a very fast and affordable way by means of the same RTK corrections used by the machines;
− most machine control systems, even if recently realised, are characterised by an advanced engineering, that make them turn-key, quite easy to learn and understand by the operators, after a fast calibration phase;
− damages to cables and pipes laying underground are avoided if the design plot includes their position and deepness.
2 SOME PROBLEMS AND PROSPECTED
INNOVATIONS The diffusion of the machine control technology in Italy is still sparse. Considering the sensible advantages in terms of cost and quality deriving from such technique, a strong increase is to be foreseen in this sector for the next future. Universities and other research centres can give their important contribute to a further development of the machine control techniques, proposing and testing new solutions aiming to even better performances. The state of art of the machine control, even if representing a great innovation with respect to the traditional building organization, still presents some drawbacks and limitations: − costs for a base station on each building site (purchase, installation, precise positioning, surveillance);
− necessity of preliminary survey operations for the estimation of a datum transformation between the local datum of the design CAD elaborates and the WGS84, passing through the realisation of an adequate number of ground control points;
− communication problems between the base station and the rovers, due to the low radio modem power permitted by the law in Italy: 5 watt, limiting the operating range to a maximum of 2 kilometers if any obstructions are present; for long spanning sites (as in the case of road building) it is necessary to place (and georeference) more base stations, or install radio repeating devices;
− affordability and integrity problems for the correction data coming from a single station, that require the execution of frequent control measures on known points;
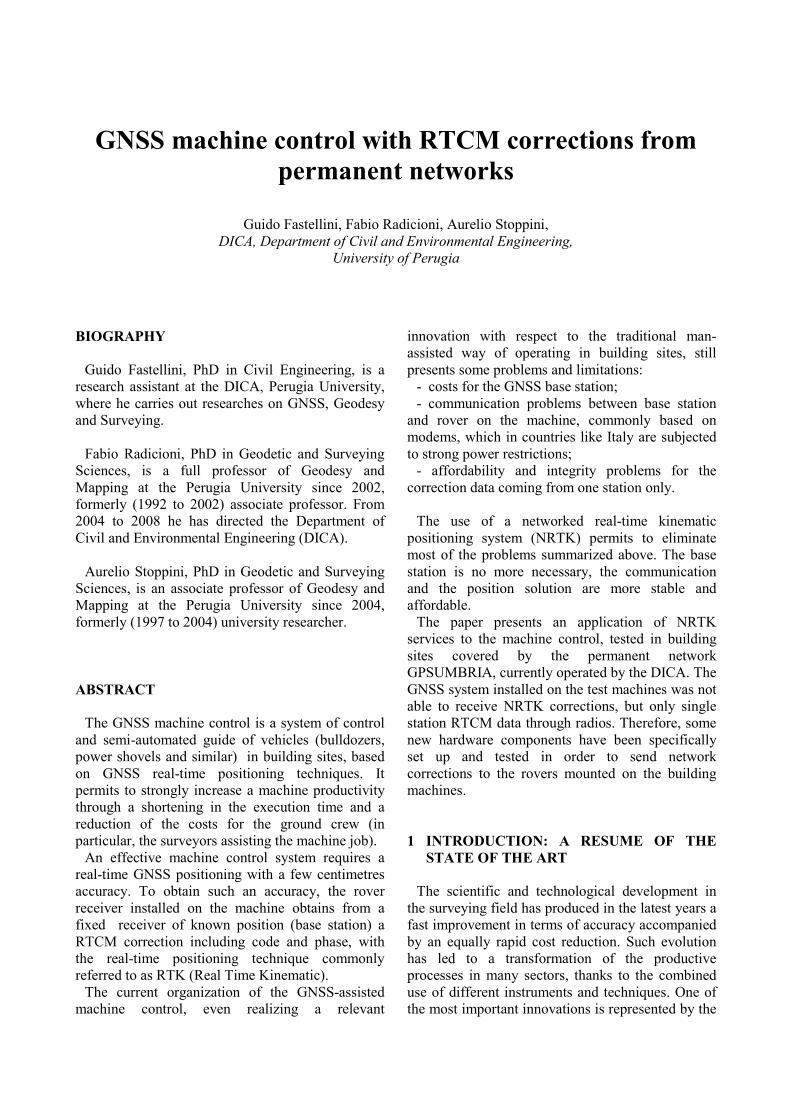
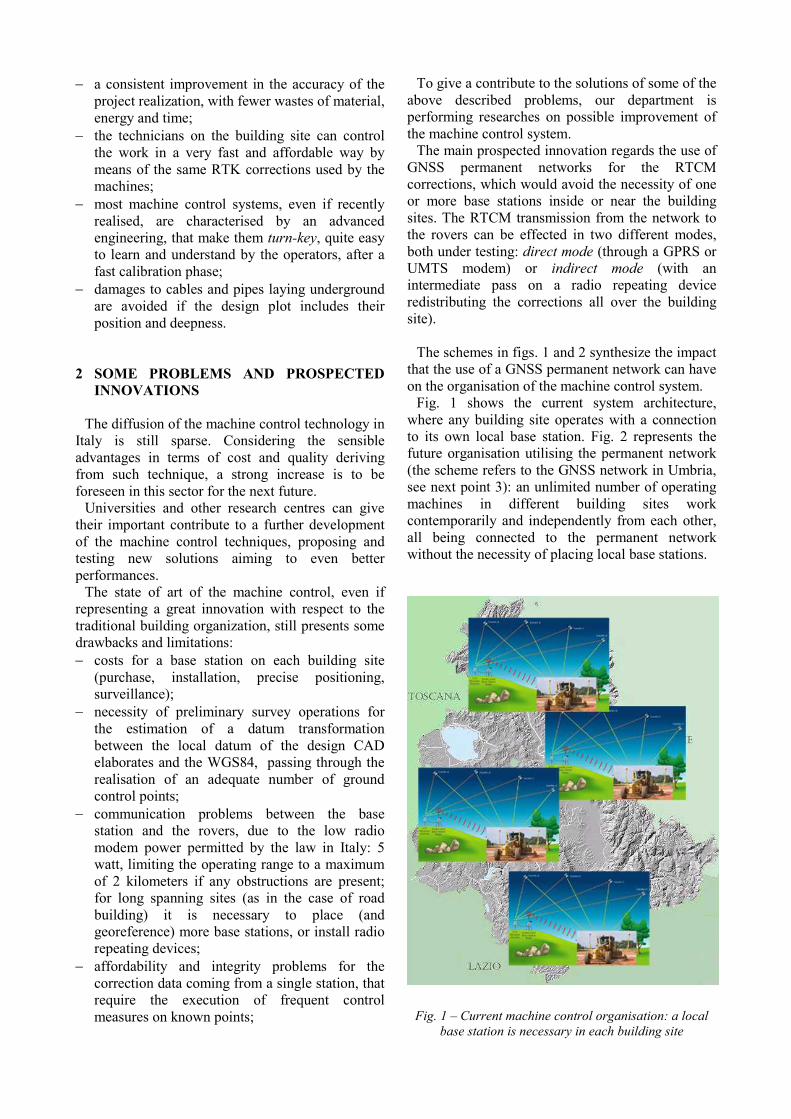
To give a contribute to the solutions of some of the above described problems, our department is performing researches on possible improvement of the machine control system. The main prospected innovation regards the use of GNSS permanent networks for the RTCM corrections, which would avoid the necessity of one or more base stations inside or near the building sites. The RTCM transmission from the network to the rovers can be effected in two different modes, both under testing: direct mode (through a GPRS or UMTS modem) or indirect mode (with an intermediate pass on a radio repeating device redistributing the corrections all over the building site). The schemes in figs. 1 and 2 synthesize the impact that the use of a GNSS permanent network can have on the organisation of the machine control system. Fig. 1 shows the current system architecture, where any building site operates with a connection to its own local base station. Fig. 2 represents the future organisation utilising the permanent network (the scheme refers to the GNSS network in Umbria, see next point 3): an unlimited number of operating machines in different building sites work contemporarily and independently from each other, all being connected to the permanent network without the necessity of placing local base stations.
Fig. 1 – Current machine control organisation: a local base station is necessary in each building site
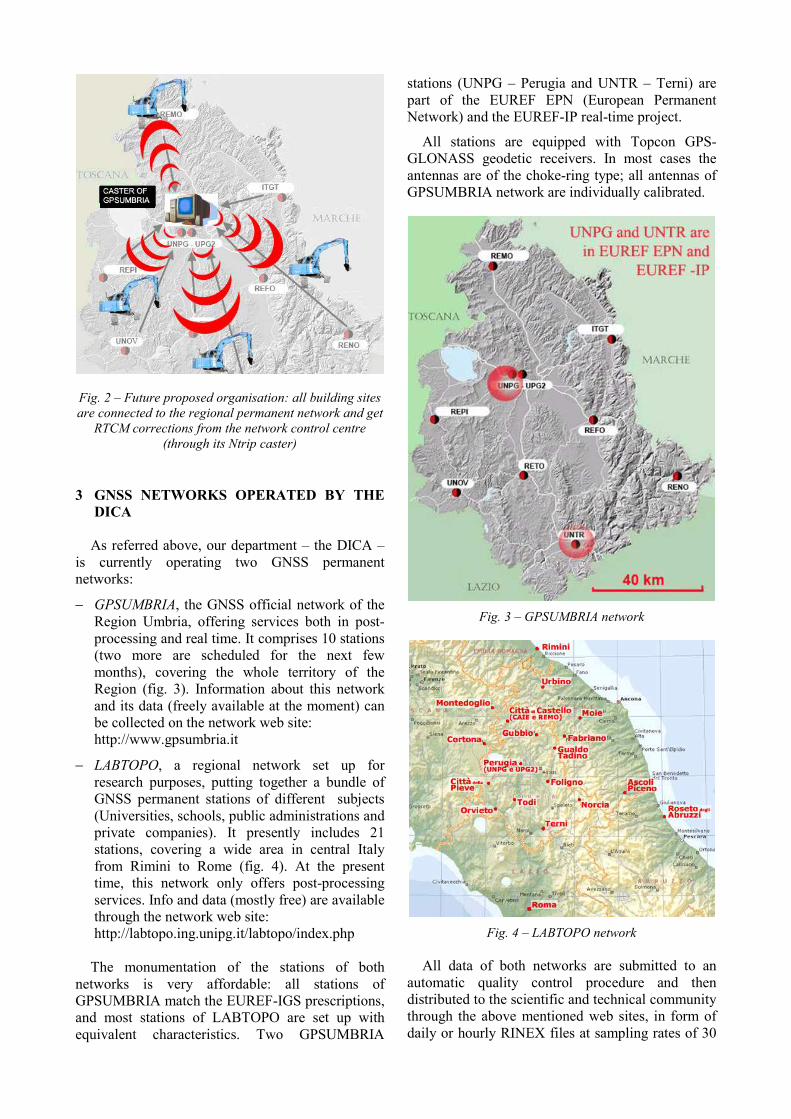
Fig. 2 – Future proposed organisation: all building sites are connected to the regional permanent network and get
RTCM corrections from the network control centre (through its Ntrip caster)
3 GNSS NETWORKS OPERATED BY THE DICA
As referred above, our department – the DICA –
is currently operating two GNSS permanent networks:
− GPSUMBRIA, the GNSS official network of the Region Umbria, offering services both in post-processing and real time. It comprises 10 stations (two more are scheduled for the next few months), covering the whole territory of the Region (fig. 3). Information about this network and its data (freely available at the moment) can be collected on the network web site: http://www.gpsumbria.it
− LABTOPO, a regional network set up for research purposes, putting together a bundle of GNSS permanent stations of different subjects (Universities, schools, public administrations and private companies). It presently includes 21 stations, covering a wide area in central Italy from Rimini to Rome (fig. 4). At the present time, this network only offers post-processing services. Info and data (mostly free) are available through the network web site: http://labtopo.ing.unipg.it/labtopo/index.php The monumentation of the stations of both
networks is very affordable: all stations of GPSUMBRIA match the EUREF-IGS prescriptions, and most stations of LABTOPO are set up with equivalent characteristics. Two GPSUMBRIA
stations (UNPG – Perugia and UNTR – Terni) are part of the EUREF EPN (European Permanent Network) and the EUREF-IP real-time project.
All stations are equipped with Topcon GPS-GLONASS geodetic receivers. In most cases the antennas are of the choke-ring type; all antennas of GPSUMBRIA network are individually calibrated.
Fig. 3 – GPSUMBRIA network
Fig. 4 – LABTOPO network
All data of both networks are submitted to an
automatic quality control procedure and then distributed to the scientific and technical community through the above mentioned web sites, in form of daily or hourly RINEX files at sampling rates of 30
seconds, 5 s and 1 s, to be used for post-processing applications, permitting the users to achieve a position accuracy down to a few millimetres. Post-processing data are currently given for free
in order to promote their use, but such distribution policy might change in the future, e.g. requiring a fee at least for the 1-second files. Real time positioning services (network code
corrections or NDGPS, and network phase corrections or NRTK) are also supplied by GPSUMBRIA network, to registered users only. The registration is currently free because the real time services are still in a “promotional” phase, but this distribution policy will likely change soon, with the scheduled transition to a fully operational phase.
Fig. 5 – GNSMART real-time network graph for
GPSUMBRIA
The real time functionality of GPSUMBRIA network is presently achieved by means of the software GNSMART by Geo++ ® (fig. 5). Phase corrections are transmitted to the users in
VRS (virtual Reference Station) or FKP (Flächen Korrektur Parameters) modes, using the RTCM 2.3 format (correction types 18, 19 or 20, 21). Code corrections are given using the RTCM 2.0 format. The users can get the corrections through a direct connection to a stack of GSM modems set up at the network control centre or (recommended approach) through the network Ntrip caster [1]. The real time software GNSMART performs
(through its GNNET module – fig. 5) a continuous computation of the network, which beside its primary function (ambiguities and biases computation) constitutes a powerful instrument for the network analysis and control.
4 TEST OF NETWORK CORRECTIONS IN A REAL CASE
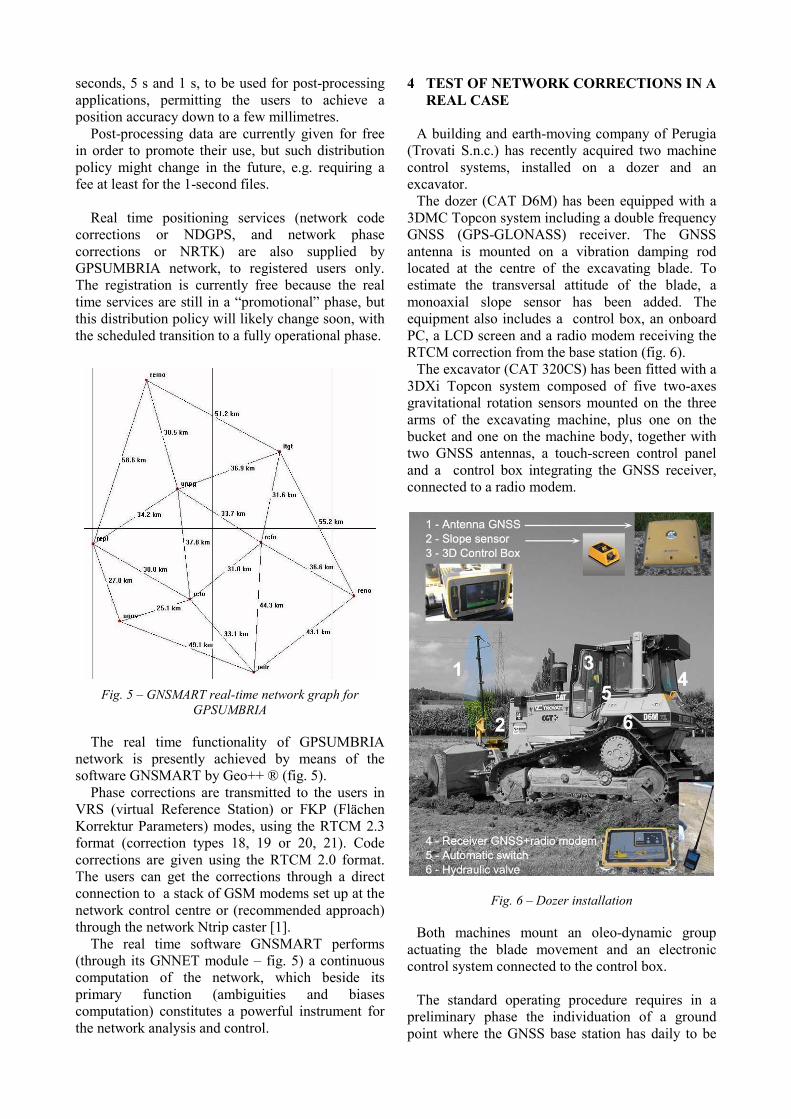
A building and earth-moving company of Perugia (Trovati S.n.c.) has recently acquired two machine control systems, installed on a dozer and an excavator. The dozer (CAT D6M) has been equipped with a 3DMC Topcon system including a double frequency GNSS (GPS-GLONASS) receiver. The GNSS antenna is mounted on a vibration damping rod located at the centre of the excavating blade. To estimate the transversal attitude of the blade, a monoaxial slope sensor has been added. The equipment also includes a control box, an onboard PC, a LCD screen and a radio modem receiving the RTCM correction from the base station (fig. 6). The excavator (CAT 320CS) has been fitted with a 3DXi Topcon system composed of five two-axes gravitational rotation sensors mounted on the three arms of the excavating machine, plus one on the bucket and one on the machine body, together with two GNSS antennas, a touch-screen control panel and a control box integrating the GNSS receiver, connected to a radio modem.
Fig. 6 – Dozer installation
Both machines mount an oleo-dynamic group actuating the blade movement and an electronic control system connected to the control box. The standard operating procedure requires in a preliminary phase the individuation of a ground point where the GNSS base station has daily to be
mounted. The WGS84 position of the station can be obtained by means of a rapid-static or RTK GNSS survey, utilising the post-processing or real-time data of a permanent network, or connecting the station to some known points (e.g. vertexes of the Italian Geodetic Network IGM95). To make the procedure more simple for operators lacking knowledge on the reference systems, the base station is often georeferenced in an approximate way (e.g. by a common point positioning through pseudorange) with the condition that the monumentation and the assigned coordinates (let us call them “pseudo-WGS84”) do not change from one day to another. Using the phase corrections transmitted by the base stations set up as above, the pseudo-WGS84 coordinates of a series of ground control points are determined by means of a RTK local survey. The control points have now a double set of coordinates: the pseudo-WGS84 and the local coordinates taken from the design CAD drawings. The system software provides the estimation of a set of transformation parameters between pseudo-WGS84 and the local system. From then on, the operator works in the local system, following the design DTM and drawings loaded on the PC and visible on the screen. The machine position, computed in RTK mode in the pseudo-WGS84 datum, is automatically converted by the software into the local system. With this operating mode there is an error due to the roughly approximate position of the base station. Anyway, such error has no influence on the work if the base station position do not change in time. If the base station has to be moved for any reason, the initialisation procedure has also to be repeated, including a new parameter estimation.
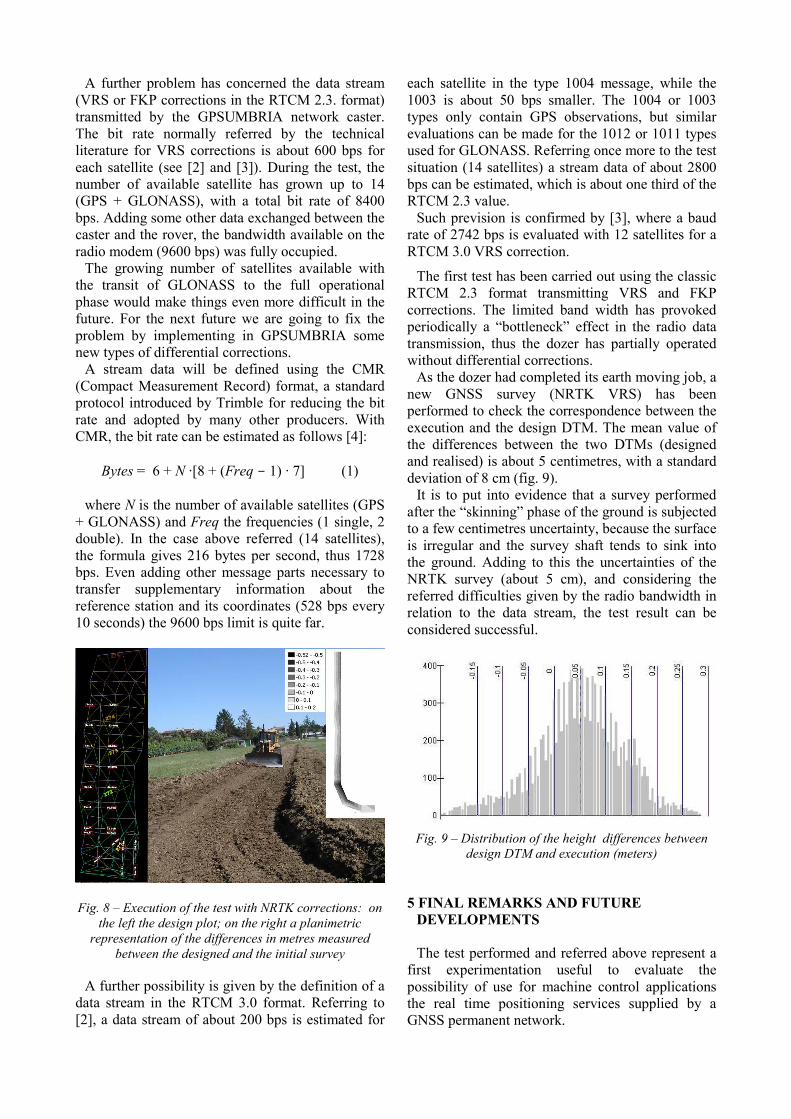
Our first series of tests, aiming in particular to verify the applicability of the proposed innovations, has been carried out with the collaboration of the companies Trovati S.n.c. and Geotop S.r.l. (the latter is the Italian distributor of Topcon products). A test area has been selected, then surveyed with the GNSS NRTK technique, utilising the VRS corrections transmitted by the GPSUMBRIA permanent network and producing an accurate local DTM. A sample design of a road track has been set up for testing purposes, including a straight part and a curve with a 15 meter radius, for a total length of about 100 m. The transversal slope of the test road has been exaggerated (10%, more than the values normally allowed) for a better testing of the dozer blade control system (fig. 8). To apply the innovation consisting in the use of the GNSS permanent network, it has been necessary to partially modify the Topcon machine control
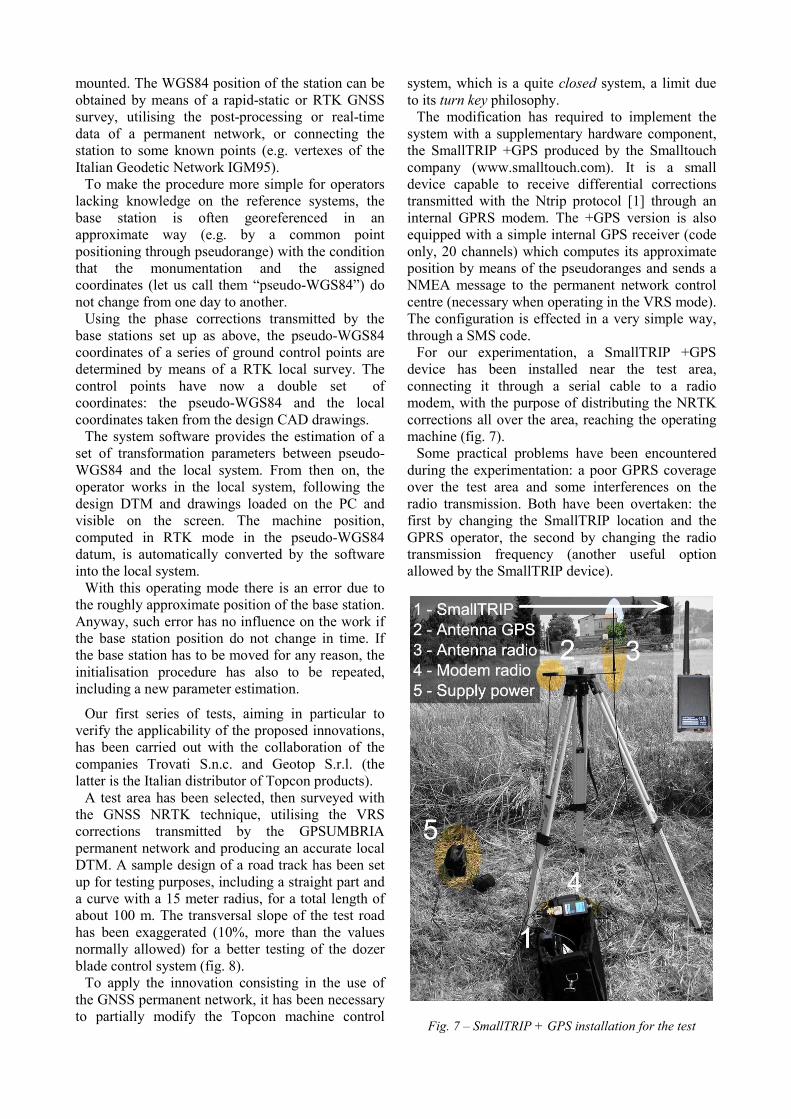
system, which is a quite closed system, a limit due to its turn key philosophy. The modification has required to implement the system with a supplementary hardware component, the SmallTRIP +GPS produced by the Smalltouch company (www.smalltouch.com). It is a small device capable to receive differential corrections transmitted with the Ntrip protocol [1] through an internal GPRS modem. The +GPS version is also equipped with a simple internal GPS receiver (code only, 20 channels) which computes its approximate position by means of the pseudoranges and sends a NMEA message to the permanent network control centre (necessary when operating in the VRS mode). The configuration is effected in a very simple way, through a SMS code. For our experimentation, a SmallTRIP +GPS device has been installed near the test area, connecting it through a serial cable to a radio modem, with the purpose of distributing the NRTK corrections all over the area, reaching the operating machine (fig. 7). Some practical problems have been encountered during the experimentation: a poor GPRS coverage over the test area and some interferences on the radio transmission. Both have been overtaken: the first by changing the SmallTRIP location and the GPRS operator, the second by changing the radio transmission frequency (another useful option allowed by the SmallTRIP device).
Fig. 7 – SmallTRIP + GPS installation for the test
A further problem has concerned the data stream (VRS or FKP corrections in the RTCM 2.3. format) transmitted by the GPSUMBRIA network caster. The bit rate normally referred by the technical literature for VRS corrections is about 600 bps for each satellite (see [2] and [3]). During the test, the number of available satellite has grown up to 14 (GPS + GLONASS), with a total bit rate of 8400 bps. Adding some other data exchanged between the caster and the rover, the bandwidth available on the radio modem (9600 bps) was fully occupied. The growing number of satellites available with the transit of GLONASS to the full operational phase would make things even more difficult in the future. For the next future we are going to fix the problem by implementing in GPSUMBRIA some new types of differential corrections. A stream data will be defined using the CMR (Compact Measurement Record) format, a standard protocol introduced by Trimble for reducing the bit rate and adopted by many other producers. With CMR, the bit rate can be estimated as follows [4]:
Bytes = 6 + N ·[8 + (Freq - 1) · 7] (1) where N is the number of available satellites (GPS + GLONASS) and Freq the frequencies (1 single, 2 double). In the case above referred (14 satellites), the formula gives 216 bytes per second, thus 1728 bps. Even adding other message parts necessary to transfer supplementary information about the reference station and its coordinates (528 bps every 10 seconds) the 9600 bps limit is quite far.
Fig. 8 – Execution of the test with NRTK corrections: on the left the design plot; on the right a planimetric
representation of the differences in metres measured between the designed and the initial survey
A further possibility is given by the definition of a data stream in the RTCM 3.0 format. Referring to [2], a data stream of about 200 bps is estimated for
each satellite in the type 1004 message, while the 1003 is about 50 bps smaller. The 1004 or 1003 types only contain GPS observations, but similar evaluations can be made for the 1012 or 1011 types used for GLONASS. Referring once more to the test situation (14 satellites) a stream data of about 2800 bps can be estimated, which is about one third of the RTCM 2.3 value. Such prevision is confirmed by [3], where a baud rate of 2742 bps is evaluated with 12 satellites for a RTCM 3.0 VRS correction.
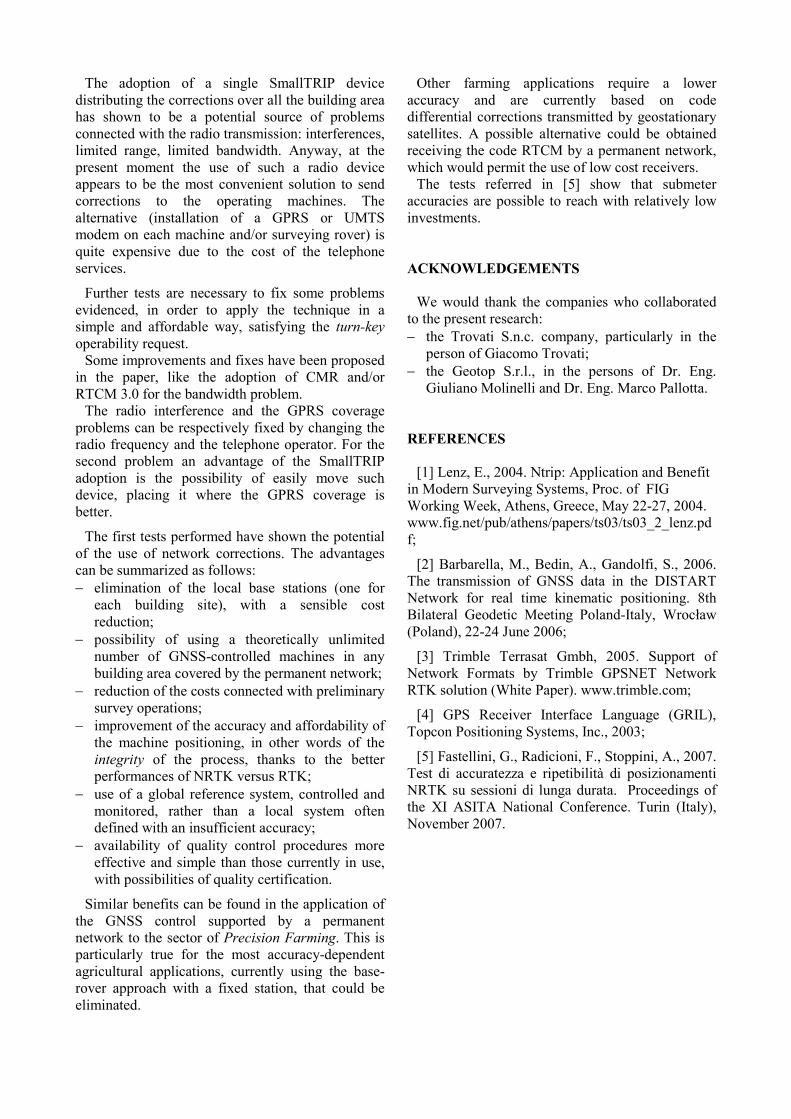
The first test has been carried out using the classic RTCM 2.3 format transmitting VRS and FKP corrections. The limited band width has provoked periodically a “bottleneck” effect in the radio data transmission, thus the dozer has partially operated without differential corrections. As the dozer had completed its earth moving job, a new GNSS survey (NRTK VRS) has been performed to check the correspondence between the execution and the design DTM. The mean value of the differences between the two DTMs (designed and realised) is about 5 centimetres, with a standard deviation of 8 cm (fig. 9). It is to put into evidence that a survey performed after the “skinning” phase of the ground is subjected to a few centimetres uncertainty, because the surface is irregular and the survey shaft tends to sink into the ground. Adding to this the uncertainties of the NRTK survey (about 5 cm), and considering the referred difficulties given by the radio bandwidth in relation to the data stream, the test result can be considered successful.
Fig. 9 – Distribution of the height differences between
design DTM and execution (meters)
5 FINAL REMARKS AND FUTURE DEVELOPMENTS The test performed and referred above represent a first experimentation useful to evaluate the possibility of use for machine control applications the real time positioning services supplied by a GNSS permanent network.
The adoption of a single SmallTRIP device distributing the corrections over all the building area has shown to be a potential source of problems connected with the radio transmission: interferences, limited range, limited bandwidth. Anyway, at the present moment the use of such a radio device appears to be the most convenient solution to send corrections to the operating machines. The alternative (installation of a GPRS or UMTS modem on each machine and/or surveying rover) is quite expensive due to the cost of the telephone services.
Further tests are necessary to fix some problems evidenced, in order to apply the technique in a simple and affordable way, satisfying the turn-key operability request. Some improvements and fixes have been proposed in the paper, like the adoption of CMR and/or RTCM 3.0 for the bandwidth problem. The radio interference and the GPRS coverage problems can be respectively fixed by changing the radio frequency and the telephone operator. For the second problem an advantage of the SmallTRIP adoption is the possibility of easily move such device, placing it where the GPRS coverage is better.
The first tests performed have shown the potential of the use of network corrections. The advantages can be summarized as follows: − elimination of the local base stations (one for each building site), with a sensible cost reduction;
− possibility of using a theoretically unlimited number of GNSS-controlled machines in any building area covered by the permanent network;
− reduction of the costs connected with preliminary survey operations;
− improvement of the accuracy and affordability of the machine positioning, in other words of the integrity of the process, thanks to the better performances of NRTK versus RTK;
− use of a global reference system, controlled and monitored, rather than a local system often defined with an insufficient accuracy;
− availability of quality control procedures more effective and simple than those currently in use, with possibilities of quality certification.
Similar benefits can be found in the application of the GNSS control supported by a permanent network to the sector of Precision Farming. This is particularly true for the most accuracy-dependent agricultural applications, currently using the base-rover approach with a fixed station, that could be eliminated.
Other farming applications require a lower accuracy and are currently based on code differential corrections transmitted by geostationary satellites. A possible alternative could be obtained receiving the code RTCM by a permanent network, which would permit the use of low cost receivers. The tests referred in [5] show that submeter accuracies are possible to reach with relatively low investments. ACKNOWLEDGEMENTS We would thank the companies who collaborated to the present research: − the Trovati S.n.c. company, particularly in the person of Giacomo Trovati;
− the Geotop S.r.l., in the persons of Dr. Eng. Giuliano Molinelli and Dr. Eng. Marco Pallotta.
REFERENCES [1] Lenz, E., 2004. Ntrip: Application and Benefit in Modern Surveying Systems, Proc. of FIG Working Week, Athens, Greece, May 22-27, 2004. www.fig.net/pub/athens/papers/ts03/ts03_2_lenz.pdf;
[2] Barbarella, M., Bedin, A., Gandolfi, S., 2006. The transmission of GNSS data in the DISTART Network for real time kinematic positioning. 8th Bilateral Geodetic Meeting Poland-Italy, Wrocław (Poland), 22-24 June 2006;
[3] Trimble Terrasat Gmbh, 2005. Support of Network Formats by Trimble GPSNET Network RTK solution (White Paper). www.trimble.com;
[4] GPS Receiver Interface Language (GRIL), Topcon Positioning Systems, Inc., 2003;
[5] Fastellini, G., Radicioni, F., Stoppini, A., 2007. Test di accuratezza e ripetibilità di posizionamenti NRTK su sessioni di lunga durata. Proceedings of the XI ASITA National Conference. Turin (Italy), November 2007.




























