Embed Size (px)
Citation preview

GlobalPositioningSystem:whatitisandhowweuseitformeasuringthe
earth’smovement.May5,2009

References
• LecturesfromK.Larson’s“IntroductiontoGNSS”http://www.colorado.edu/engineering/ASEN/asen5090/
• Strang,G.andK.Borre“LinearAlgebra,Geodesy,andGPS”,Wellesley‐CambridgePress,1997
• Blewitt,G.,“BasicsoftheGPSTechnique:ObservationEquations”,in“GeodeticApplicationsofGPS”
• http://www.kowoma.de/en/gps/index.htm• http://www.kemt.fei.tuke.sk/predmety/KEMT559_SK/GPS/GPS_Tutorial_2.pdf
• LecturenotesfromG.Mattioli’(comp.uark.edu/~mattioli/geol_4733/GPS_signals.ppt)

Basicsofhowitworks
• Trilateration• GPSgivesdistanceto4satellites
‐ x,y,z,t‐ Earthcentered,EarthFixed
‐ Whyt?
‐ Whataresomeofreasonswhymeasuringdistanceisdifficult?
‐ Howdoweknowx,y,z,tofsatellites?

GPS:Spacesegment
• SeveraldifferenttypesofGPSsatellites(BlockI,II,IIA,IIR)
• Allhaveatomicclocks– Stabilityofatleast10‐13sec1secevery~300,000yrs
• Dynamicsoforbit?
• Referencepoint?

OrbitalPerturbations–(centralforceis0.5m/s2)Source Acceleration
m/s2
Perturbation
3 hrs
Type
Earth oblateness (J2 )
5 x 10-5 2 km @ 3 hrs secular + 6 hr
Sun & moon 5 x 10-6 5-150 m @ 3 hrs secular + 12hr
Higher Harmonics 3 x 10-7 5-80 m @ 3 hrs Various
Solar radiation pressure
1 x 10-7 100-800 m @2 days Secular + 3 hr
Ocean & earth tides
1 x 10-9 0-2m @2 days secular + 12hr
Earth albedo pressure
1 x 10-9 1-1.5m @2 days
FromK.Larson

GPS:SpaceSegment
• 24+satellitesinorbit– Cansee4atanytime,anypointonearth
– Satellitesneverdirectlyoverthepoles
– Formostmid‐latitudelocations,satellitestrackmainlynorth‐south

GPS:SatelliteGroundTrack

GPSSignal
• Satellitetransmitsontwocarrierfrequencies:– L1(wavelength=19cm)– L2(wavelength=24.4cm)
• Transmits3differentcodes/signals– P(precise)code
• Chiplength=29.3m– C/A(courseacquisition)code
• Chiplength=293m– Navigationmessage
• Broadcastephemeris(satelliteorbitalparameters),SVclockcorrections,ionoinfo,SVhealth

GPSSignal
• Signalphasemodulated:
vs
Amplitudemodulation(AM) Frequencymodulation(FM)

C/AandPcode:PRNCodes
• PRN=PseudoRandomNoise– Codeshaverandomnoisecharacteristicsbutarepreciselydefined.
• Asequenceofzerosandones,eachzerooronereferredtoasa“chip”.– Calledachipbecausetheycarrynodata.
• SelectedfromasetofGoldCodes.– Goldcodesuse2generatorpolynomials.
• ThreetypesareusedbyGPS– C/A,PandY

PRNCodes:first100bits

PRNCodeproperties
• HighAutocorrelationvalueonlyataphaseshiftofzero.
• MinimalCrossCorrelationtootherPRNcodes,noiseandinterferers.
• Allowsallsatellitestotransmitatthesamefrequency.
• PRNCodescarrythenavigationmessageandareusedforacquisition,trackingandranging.

PRNCodeCorrelation

Non‐PRNCodeCorrelation

SchematicofC/A‐codeacquisition
SinceC/A‐codeis1023chipslongandrepeatsevery1/1000s,itisinherentlyambiguousby1msecor~300km.

BASICGPSMEASUREMENT:PSEUDORANGE
( )
= time of reception as observed by the receiver
= time of transmission as generated by the satellite
su
us
c t t
tt
ρ = −
• Receivermeasuresdifferencebetweentimeoftransmissionandtimeofreceptionbasedoncorrelationofreceivedsignalwithalocalreplica
Themeasuredpseudorangeisnotthetruerangebetweenthesatelliteandreceiver.Thatiswhatweclarifywiththeobservableequation.

PSEUDORANGEOBSERVABLEMODEL
( )( )
1 1 1 1
2 2 2 2
1
2
= pseudorange measured on L1 frequency based on code = pseudorange measured on L2 frequency based on code
= geometrical range from satellit
su
su
R c t t T I M
R c t t T I M
R
ρ ρ ρ
ρ ρ ρ
ρ δ δ ε
ρ δ δ ε
ρ
ρ
= + − + + + +
= + − + + + +
1/ 2
1/ 2
1/ 2
e to user = user/receiver clock error
= satellite clock error = tropospheric delay
= ionospheric delay in code measurement on L1/2= multipath delay in code measurement on L1/2
=
us
s uttTIMρ
ρ
ρ
δ
δ
ε other delay/errors in code measurement on L1/2

CARRIERPHASEMODEL( )( )
1 1 1 1 1 1 1
2 2 2 2 2 2 2
1
2
= carrier phase measured on L1 frequency (C/A or P(Y) parts) = carrier phase measured on L2 frequency = geometrical range fr
su
su
R c t t T I M N
R c t t T I M N
R
ρ φ φ
ρ φ φ
φ λ δ δ λ ε
φ λ δ δ λ ε
φ
φ
= + − + − + + +
= + − + − + + +
1 2
1 2
om satellite to user = user/receiver clock error
= satellite clock error = tropospheric del
code measurementay
, = ionospheric delay in on L1/2, = multipath delay in carrier phase m
us
s uttTI IM Mρ ρ
φ φ
δ
δ
1 2
1 2
1 2
easurement on L1/2, = carrier phase bias or ambiguity, = carrier wavelength, = other delay/errors in carrier phase measurement on L1/2
N N
φ φ
λ λ
ε ε

COMPAREPSEUDORANGEandCARRIERPHASE
• biastermNdoesnotappearinpseudorange• ionosphericdelayisequalmagnitudebutoppositesign• troposphere,geometricrange,clock,andtroposphereerrorsarethesameinboth
• multipatherrorsaredifferent(phasemultipatherrormuchsmallerthanpseudorange)
• noisetermsaredifferent(factorof100smallerinphasedata)
( )( )
1 1 1 1
1 1 1 1 1 1 1
su
su
R c t t T I M
R c t t T I M N
ρ ρ ρ
ρ φ φ
ρ δ δ ε
φ λ δ δ λ ε
= + − + + + +
= + − + − + + +

AtmosphericEffects
• Ionosphere(50‐1000km)– Delayisproportionaltonumberofelectrons
• Troposphere(~16kmatequator,wherethickest)– Delayisproportionaltotemp,pressure,humidity.

VerticalStructureofAtmosphere

Troposphericeffects• Lowestregionoftheatmosphere–indexofrefraction=~1.0003at
sealevel
• Neutralgasesandwatervapor–causesadelaywhichisnotafunctionoffrequencyforGPSsignal
• Drycomponentcontributes90‐97%
• Wetcomponentcontributes3‐10%
• Totalisabout2.5mfor
zenithto25mfor5deg

Atlowerelevationangles,theGPSsignaltravelsthroughmoretroposphere.
Troposphericeffects

DryTroposphereDelay
Saastamoinenmodel:• P0isthesurfacepressure(millibars)• φisthelatitude• histhereceiverheight(m)
Hopfieldmodel:• hdis43km• T0istemperature(K)
Mappingfunction:• E–satelliteelevation
( )3, 02.277 10 1 0.0026cos 2 0.00028z dT h Pφ−= × + +
6 0,
0
77.6 105d
z dP h
TT
−= ×
10.00143sin
tan 0.0445
dmE
E
=+
+
~2.5matsealevel
1(zenith)–10(5deg)

WetTroposphereCorrection
Lesspredictablethandrypart,modeledby:
Saastamoinenmodel:
Hopfieldmodel:
• hwis12km• e0ispartialpressureofwatervaporinmbar
Mappingfunction:
3, 0
12552.277 10 0.05z wT eT
− = × +
0, 2
0
0.3735w
z we h
TT
=
10.00035sin
tan 0.017
dmE
E
=+
+
0–80cm

ExamplesofWetZenithDelay

Ionosphereeffects•Pseudorangeislonger–“groupdelay”
•CarrierPhaseisshorter–“phaseadvance”
( )( )
( )( )
( )
1 1 1 1
2 2 2 2
1 1 1 1 1 1 1
1 2 2 2 2 2 2
2
1 1 1 1 1 1 1
1
40.3
sL u L L L
sL u L L L
sL u L L L
sL u L L L
sL u L L L
R c t t I T MP
R c t t I T MP
R N c t t I T MP
R N c t t I T MP
TECI If
R N c t t I T MP
ρ ρ ρ
ρ ρ ρ
φ φ φ
φ φ φ
ρ φ
ρ φ φ
ρ δ δ ε
ρ δ δ ε
λ φ λ δ δ ε
λ φ λ δ δ ε
λ φ λ δ δ ε
λ
= + − + + + +
= + − + + + +
= − + − + + + +
= − + − + + + +
⋅≈ − ≈
= − + − − + + +
( )2 2 2 2 2 2s
L u L L LR N c t t I T MPρ φ φφ λ δ δ ε= − + − − + + +
TEC=TotalElectronContent

28
DeterminingIonosphericDelay
( )
( )
( )( )
22
1 2 12 21 2
21
2 2 12 21 2
2 21 2
2 12 21 2
Ionospheric delay on L1 pseudorange
Ionospheric delay on L2 pseudorange
40.3
L L L
L L L
L L
fIf ffI
f ff fTECf f
ρ
ρ
ρ ρ
ρ ρ
ρ ρ
= −−
= −−
= −−
WherefrequenciesareexpressedinGHz,pseudorangesareinmeters,andTECisinTECU’s(1016electrons/m2)

Ionospheremaps

30
Ionosphere‐freePseudorange
( )2
21 2 12 2
1 22 2
1 2" 3" 1 22 2 2 2
1 2 1 2
1 2
Ionospheric delay on L1 pseudorange
Ionosphere-free pseudorange
2.546 1.546
L L L
IF L L L
IF L L
fIf f
f ff f f f
ρ ρ ρ
ρ ρ ρ ρ
ρ ρ ρ
= −−
= = −− −
= −
Ionosphere‐freepseudorangesaremorenoisythanindividualpseudoranges.

Multipath
• Reflectedsignals– Canbemitigatedbyantennadesign
– Multipathsignalrepeatswithsatelliteorbitsandsocanberemovedby“siderealfiltering”

StandardPositioningErrorBudgetSingleFrequency DoubleFrequency
EphemerisData 2m 2m
SatelliteClock 2m 2m
Ionosphere 4m 0.5–1m
Troposphere 0.5–1m 0.5–1m
Multipath 0‐2m 0‐2m
UERE 5m 2‐4m
UERE=UserEquivalentRangeError

IntentionalErrorsinGPS
• S/A:Selectiveavailability– Errorsinthesatelliteorbitorclock– TurnedoffMay2,2000
WithSA–95%ofpointswithin45mradius.SAoff,95%ofpointswithin6.3m
•Didn’teffecttheprecisemeasurementsusedfortectonicsthatmuch.Whynot?

IntentionalErrorsinGPS
• A/S:Anti‐spoofing– EncryptionofthePcode(Ycode)– DifferenttechniquesfordealingwithA/S
• RecoverL1,L2phase• Canrecoverpseudorange(rangeestimatedusingP‐code)
• Generallyworsenssignaltonoiseratio

ASTechnologiesSummaryTable
Trimble4000SSi
AshtechZ‐12&µZ
FromAshjaee&Lorenz,1992

PSEUDORANGEOBSERVABLEMODEL
( )( )
1 1 1 1
2 2 2 2
1
2
= pseudorange measured on L1 frequency based on code = pseudorange measured on L2 frequency based on code
= geometrical range from satellit
su
su
R c t t T I M
R c t t T I M
R
ρ ρ ρ
ρ ρ ρ
ρ δ δ ε
ρ δ δ ε
ρ
ρ
= + − + + + +
= + − + + + +
1/ 2
1/ 2
1/ 2
e to user = user/receiver clock error
= satellite clock error = tropospheric delay
= ionospheric delay in code measurement on L1/2= multipath delay in code measurement on L1/2
=
us
s uttTIMρ
ρ
ρ
δ
δ
ε other delay/errors in code measurement on L1/2

EXAMPLEOFPSEUDORANGE(1)
( )1 1 1 1s
uR c t t T I Mρ ρ ρρ δ δ ε= + − + + + +

EXAMPLEOFPSEUDORANGE(2)

GEOMETRICRANGE
• Distancebetweenpositionofsatelliteattimeoftransmissionandpositionofreceiverattimeofreception
( ) ( ) ( )2 2 2s s su u uR x x y y z z= − + − + −

PSEUDORANGEminusGEOMETRICRANGE
• Differenceistypicallydominatedbyreceiverclockorsatelliteclock.
( )1 1 1 1s
uR c t t T I Mρ ρ ρρ δ δ ε− = − + + + +

L1PSEUDORANGE‐L2PSEUDORANGE
• Differencingpseudorangesontwofrequenciesremovesgeometricaleffects,clocks,troposphere,andsomeionosphere
( )( )
1 1 1 1
2 2 2 2
1 2 1 2 1 2 1 2
su
su
R c t t T I M
R c t t T I M
I I M M
ρ ρ ρ
ρ ρ ρ
ρ ρ ρ ρ ρ ρ
ρ δ δ ε
ρ δ δ ε
ρ ρ ε ε
= + − + + + +
= + − + + + +
− = − + − + −

GeometryEffects:DilutionofPrecision(DOP)
GoodGeometry BadGeometry

DilutionofPrecision
€
VDOP =σ h
HDOP = σ n2 +σ e
2
PDOP = σ n2 +σ e
2 +σ h2
TDOP =σ t
GDOP = σ n2 +σ e
2 +σ h2 + c 2σ t
2
Covarianceispurelyafunctionofsatellitegeometry

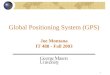
DilutionofPrecision(VDOP)
Wuhan,China,30latCaseystation,Antarctica,66.3latitude

Positioning
•Mostbasic:solvesystemofrangeequationsfor4unknowns,receiverx,y,z,t
P1=((x1‐x)2+(y1‐y)2+(z1‐z)2)1/2+ct‐ct1
…P4=((x4‐x)2+(y4‐y)2+(z4‐z)2)1/2+ct‐ct4
• Linearizeproblembyusingareference,orapriori,positionforthereceiver– Eveninadvancedsoftware,needagoodaprioripositiontogetsolution.

Positioningvs.DifferentialGPS
• Bydifferencingobservationsattwostationstogetrelativedistance,manycommonerrorssourcesdropout.
• Thecloserthestations,thebetterthisworks• Bringsprecisionuptomm,insteadofm.

SingleDifferencing
•Removessatelliteclockerrors•Reducestroposphereandionospheredelaystodifferentialbetweentwosites•Givesyourelativedistancebetweensites,notabsoluteposition
€
ΔLABj = ΔρAB
j + cΔτAB + ΔZABj −ΔIAB
j + ΔBABj

DoubleDifferencing
€
∇ΔLABjk =∇ΔρAB
jk +∇ΔZABjk −∇ΔIAB
jk + λ∇ΔNABjk
•Receiverclockerrorisgone•Randomerrorsareincreased(e.g.,multipath,measurementnoise)•Doubledifferencephaseambiguityisaninteger
€
ΔLABj = ΔρAB
j + cΔτAB + ΔZABj −ΔIAB
j + ΔBABj
ΔLABk = ΔρAB
k + cΔτAB + ΔZABk −ΔIAB
k + ΔBABk

HighprecisionGPSforGeodesy• Usepreciseorbitproducts(e.g.,IGSorJPL)
• Usespecializedmodelingsoftware
– GAMIT/GLOBK
– GIPSY‐OASIS– BERNESE
• Thesesoftwarepackageswill
– Estimateintegerambiguities• ReducesrmsofEastcomponentsignificantly
– Modelphysicalprocessesthateffectprecisepositioning,suchasthosediscussedsofarplus
• SolidEarthTides• PolarMotion,LengthofDay
• Oceanloading• Relativisticeffects• Antennaphasecentervariations

HighprecisionGPSforGeodesy• Producedaily
stationpositionswith2‐3mmhorizontalrepeatability,10mmvertical.
• Canimprovethesestatsbyremovingcommonmodeerror.





![Smart Positioning Controller SPC200 · Manuale Elettronica/ Pneumatica Manuale di sistema Smart Positioning Controller Tipo SPC200 Manuale 194 501 it 0503c [685 089] Smart Positioning](https://img.pdfslide.us/doc/110x75/61483a56cee6357ef92537a5/smart-positioning-controller-spc200-manuale-elettronica-pneumatica-manuale-di-sistema.jpg)