Embed Size (px)
Citation preview
Global Navigation Satellite Systems
State of Affairs
Huibert-Jan Lekkerkerk
Plymouth, January 12, 2011
Introduction – Who isHuibert-Jan (“H-J”) Lekkerkerk
• Education: – Hydrography (1995: B.Sc. / Cat-A);– Maritime electronics (1997: B.Ee.) – Geographic Information (2012?: M.Sc.)
• 15+ years surveying experience• Professional highlights:
– Author ‘GPS Handbook for professional GPS users’– Lecturer / Editor Hydrography (Skilltrade / Cat-B)– Editor & GPS Reviewer (GeoInformatics)– Co-Author / Editor ‘Handbook of Offshore Surveying’– Survey consultant Rotterdam Maasvlakte 2 port extension
Contents
• What is Global Navigation Satellite Systems?• Which systems exist?
– GNSS– Augmentation systems
• What are the developments?• What are the ‘challenges’?
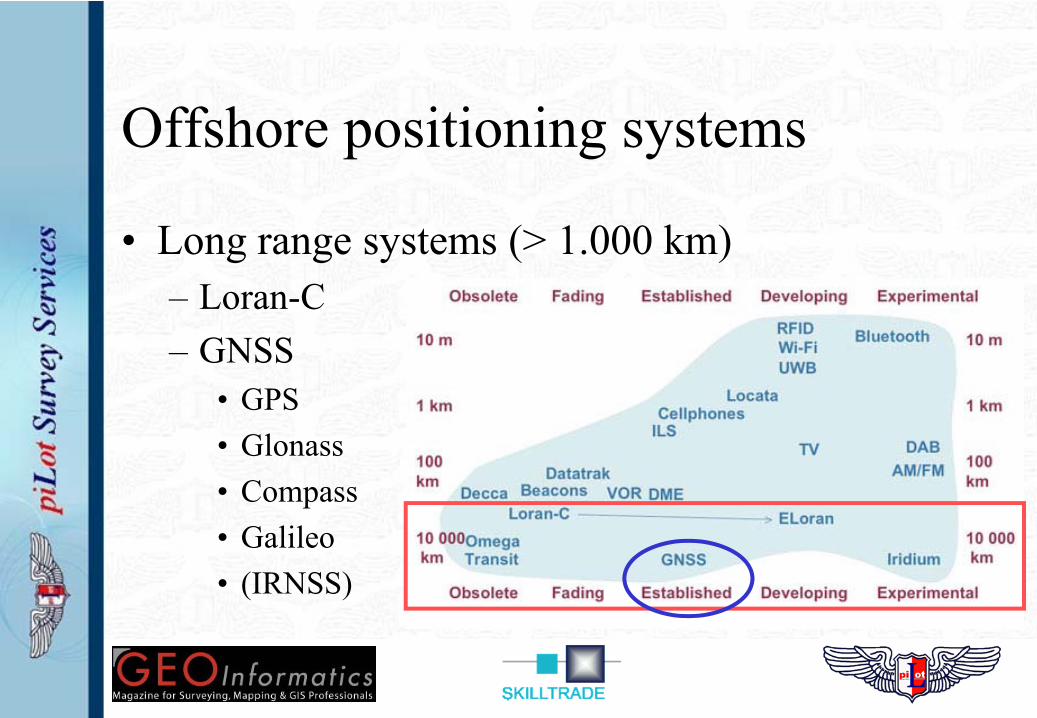
Offshore positioning systems
• Long range systems (> 1.000 km)– Loran-C– GNSS
• GPS• Glonass• Compass• Galileo• (IRNSS)
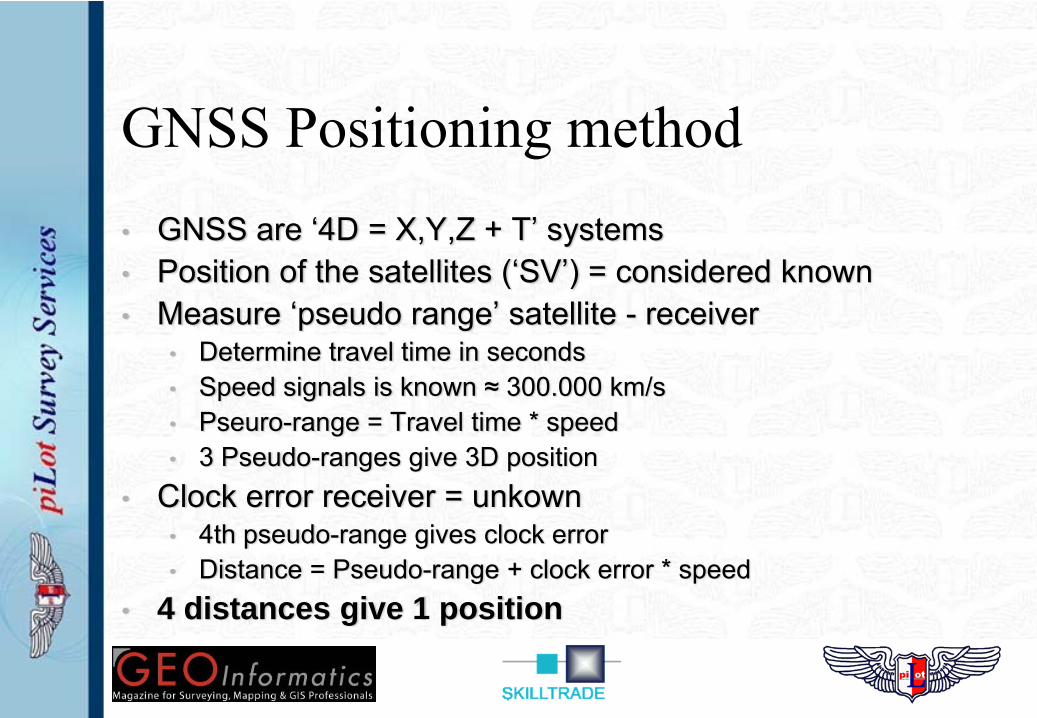
GNSS Positioning method• GNSS are ‘4D = X,Y,Z + T’ systems• Position of the satellites (‘SV’) = considered known• Measure ‘pseudo range’ satellite - receiver
• Determine travel time in seconds• Speed signals is known ≈ 300.000 km/s• Pseuro-range = Travel time * speed• 3 Pseudo-ranges give 3D position
• Clock error receiver = unkown• 4th pseudo-range gives clock error• Distance = Pseudo-range + clock error * speed
• 4 distances give 1 position
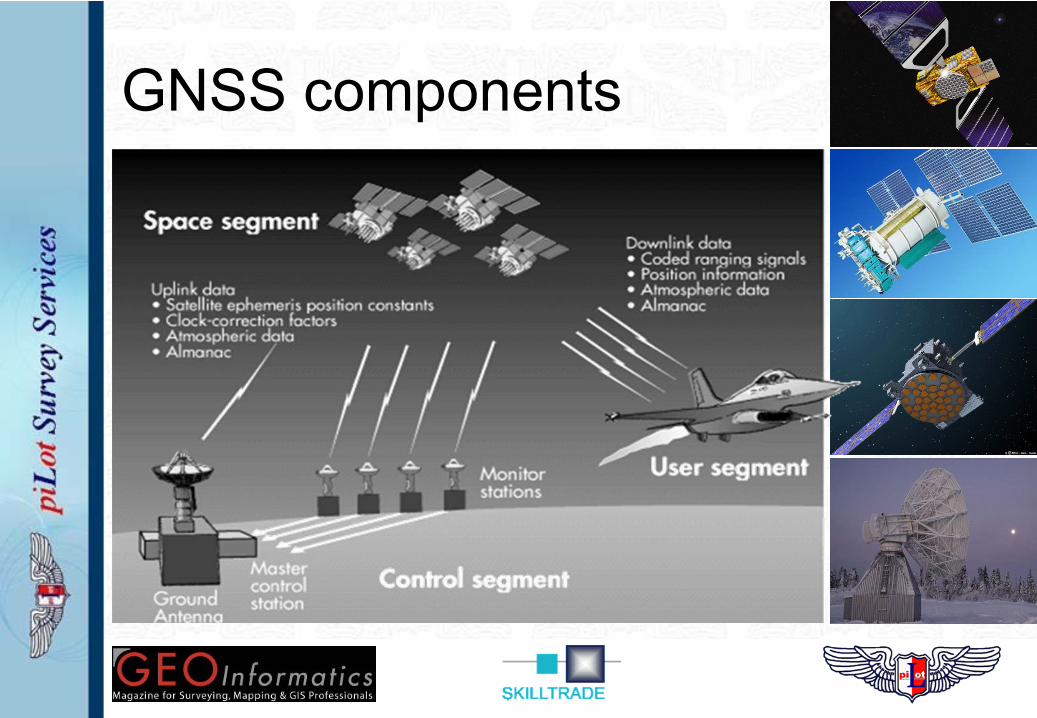
GNSS components
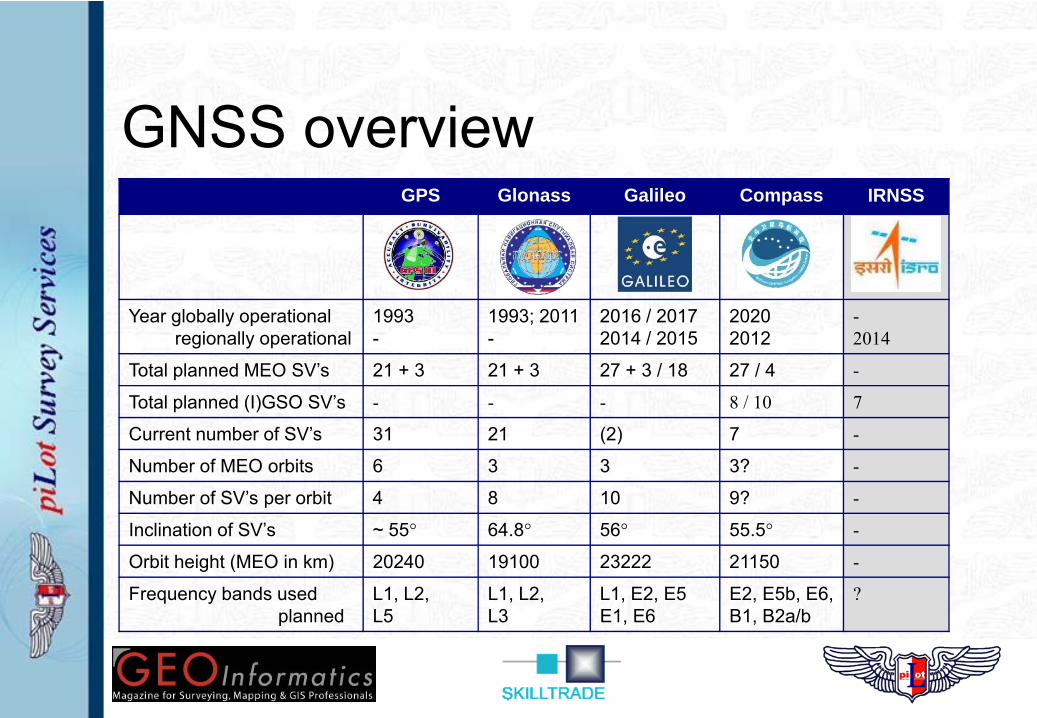
GNSS overviewGPS Glonass Galileo Compass IRNSS
Year globally operationalregionally operational
1993-
1993; 2011-
2016 / 20172014 / 2015
20202012
-2014
Total planned MEO SV’s 21 + 3 21 + 3 27 + 3 / 18 27 / 4 -
Total planned (I)GSO SV’s - - - 8 / 10 7
Current number of SV’s 31 21 (2) 7 -
Number of MEO orbits 6 3 3 3? -
Number of SV’s per orbit 4 8 10 9? -
Inclination of SV’s ~ 55° 64.8° 56° 55.5° -
Orbit height (MEO in km) 20240 19100 23222 21150 -
Frequency bands usedplanned
L1, L2, L5
L1, L2, L3
L1, E2, E5E1, E6
E2, E5b, E6, B1, B2a/b
?
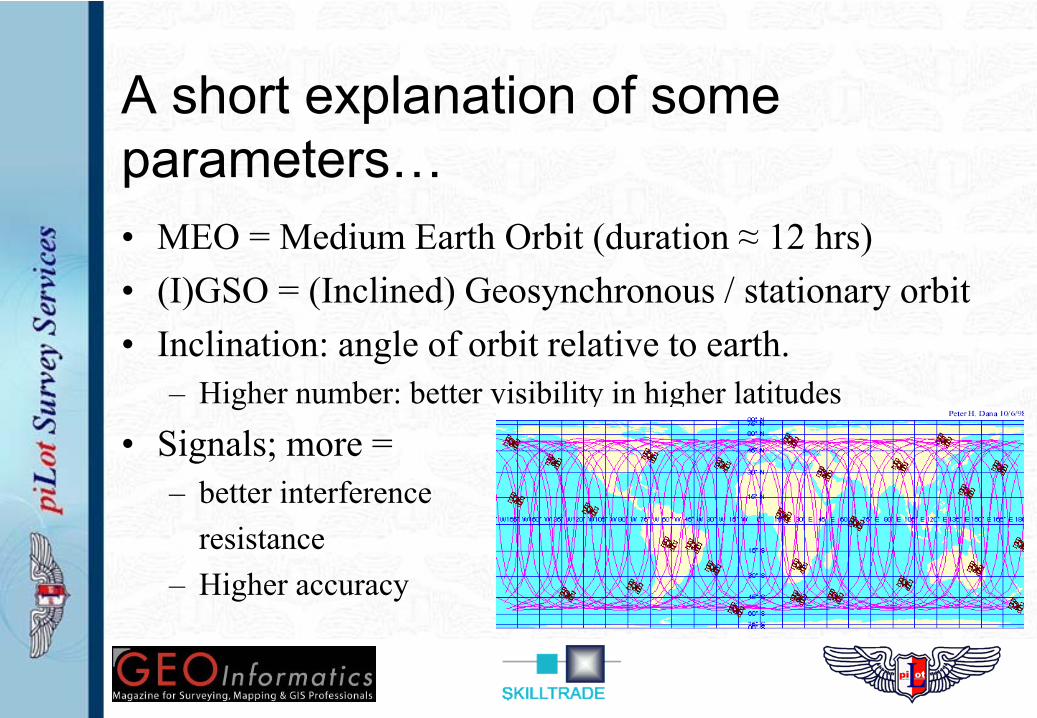
A short explanation of some parameters…• MEO = Medium Earth Orbit (duration ≈ 12 hrs)• (I)GSO = (Inclined) Geosynchronous / stationary orbit• Inclination: angle of orbit relative to earth.
– Higher number: better visibility in higher latitudes
• Signals; more = – better interference
resistance– Higher accuracy
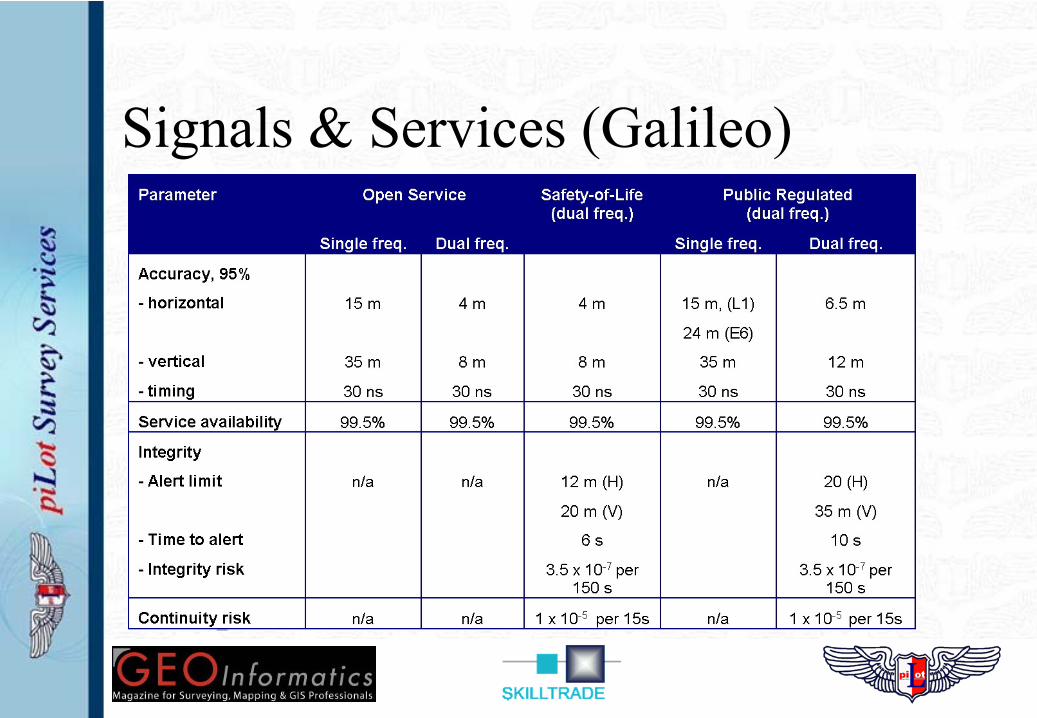
Signals & Services (Galileo)
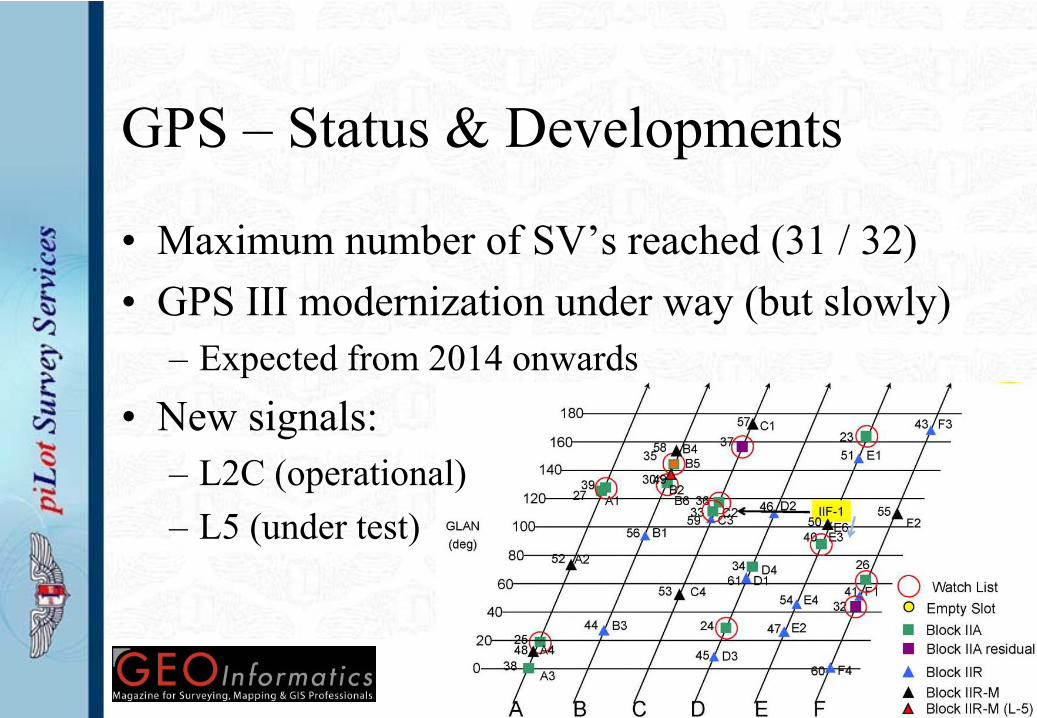
GPS – Status & Developments
• Maximum number of SV’s reached (31 / 32)• GPS III modernization under way (but slowly)
– Expected from 2014 onwards• New signals:
– L2C (operational)– L5 (under test)
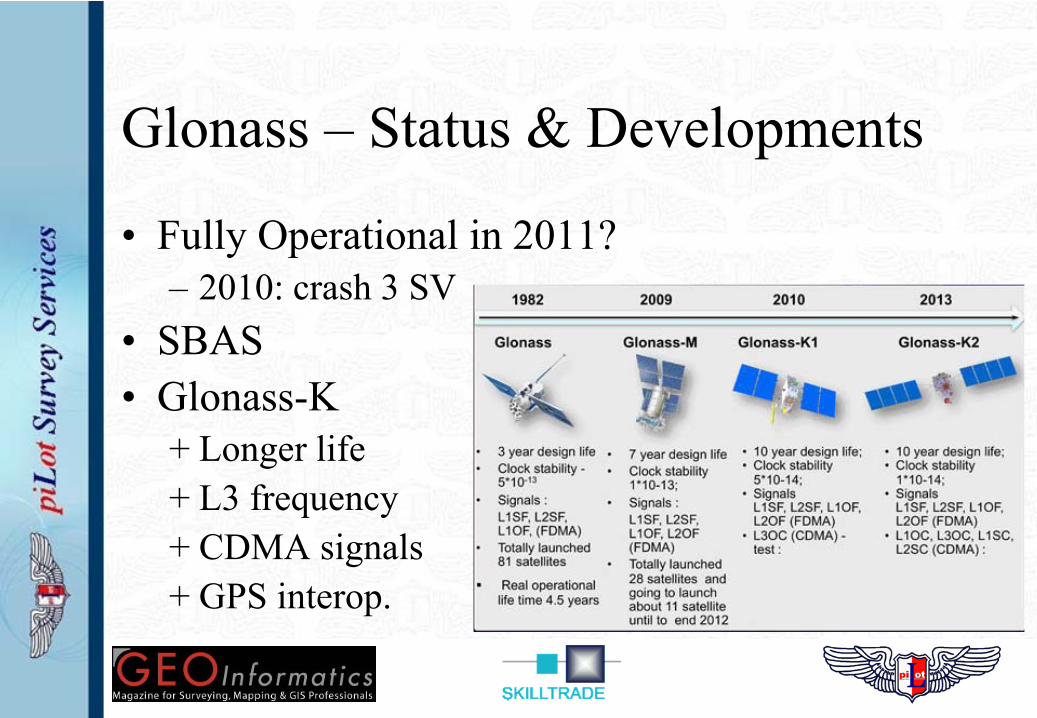
Glonass – Status & Developments
• Fully Operational in 2011?– 2010: crash 3 SV
• SBAS• Glonass-K
+ Longer life+ L3 frequency+ CDMA signals+ GPS interop.
Galileo – Status & Developments
• Untill 2014 / 2015– First 4 SV’s under construction– After ‘In Orbit Validation’ of first 4; next 14– Control segment is under construction– Budget overruns (again…) are rumoured
• After 2015– ? -> no budget reserved / available yet– 18 SV’s only give 90% coverage– SoL & PRS need 24 SV’s or more

Compass – Status & Developments
• Little information comes out of China…– No interface control document (promised 6 – 2010)– No interaction / discussion with other GNSS
• Rapid / serious development:– 5 satellites launched in 2011– 7 more planned for 2012!
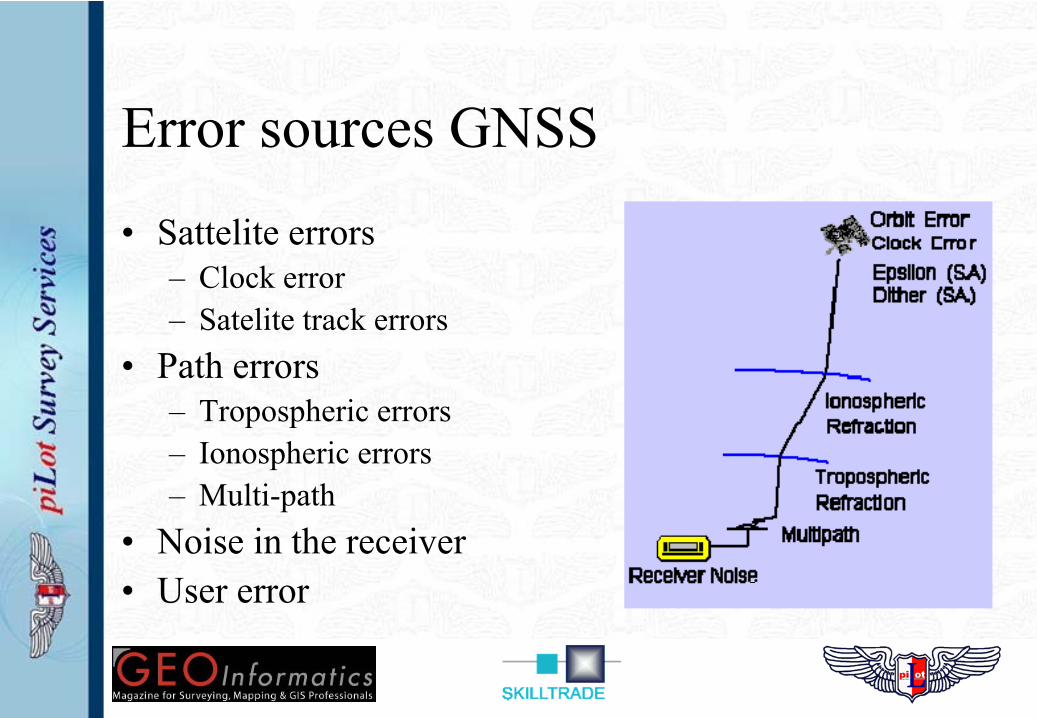
Error sources GNSS
• Sattelite errors– Clock error– Satelite track errors
• Path errors– Tropospheric errors– Ionospheric errors– Multi-path
• Noise in the receiver• User error
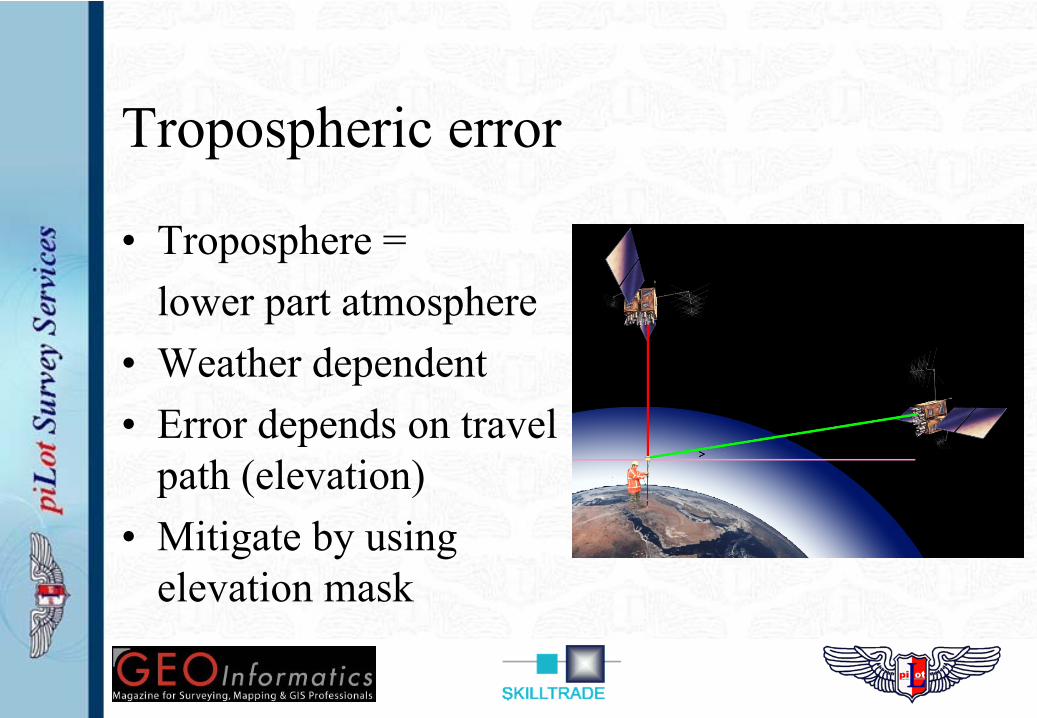
Tropospheric error
• Troposphere = lower part atmosphere
• Weather dependent• Error depends on travel
path (elevation)• Mitigate by using
elevation mask
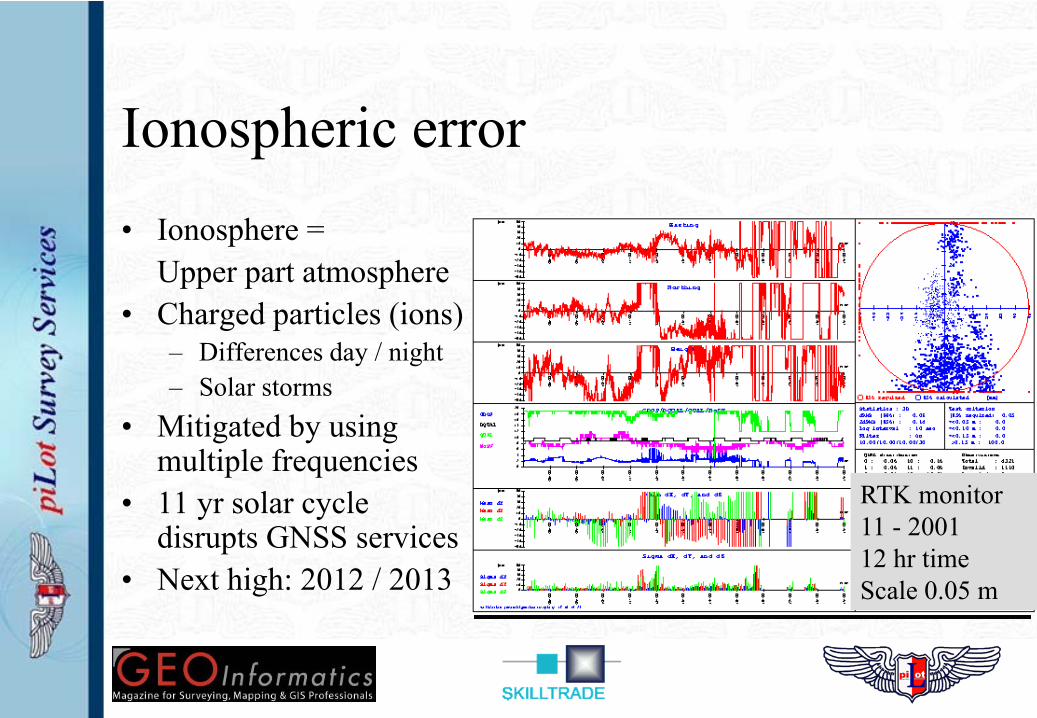
Ionospheric error• Ionosphere =
Upper part atmosphere• Charged particles (ions)
– Differences day / night– Solar storms
• Mitigated by using multiple frequencies
• 11 yr solar cycle disrupts GNSS services
• Next high: 2012 / 2013
RTK monitor11 - 200112 hr timeScale 0.05 m
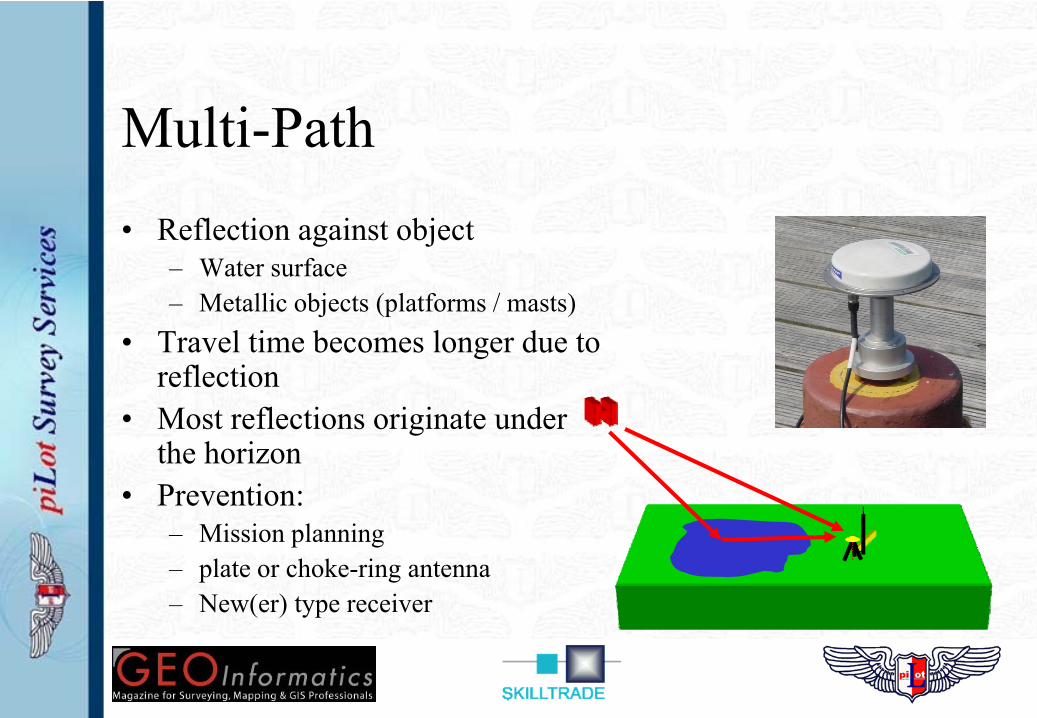
Multi-Path• Reflection against object
– Water surface– Metallic objects (platforms / masts)
• Travel time becomes longer due to reflection
• Most reflections originate under the horizon
• Prevention:– Mission planning– plate or choke-ring antenna– New(er) type receiver
Differential GNSS
– Uses earthbound correction stations (base)– Correction for most GNSS errors
• Exception: user error & multi-path.– Various types of dGNSS systems
• Code phase dGNSS• Carrier phase dGNSS• Precise Point Positioning (PPP)
– Free to air & Commercial (Veripos & Fugro)
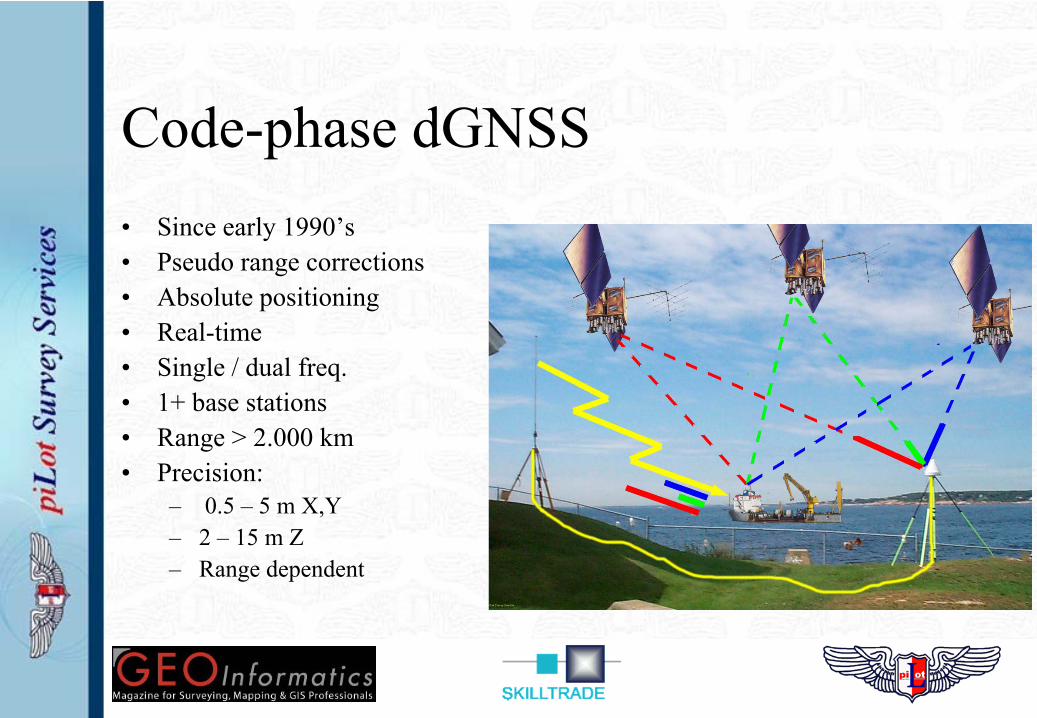
Code-phase dGNSS• Since early 1990’s• Pseudo range corrections• Absolute positioning• Real-time• Single / dual freq.• 1+ base stations• Range > 2.000 km• Precision:
– 0.5 – 5 m X,Y– 2 – 15 m Z– Range dependent
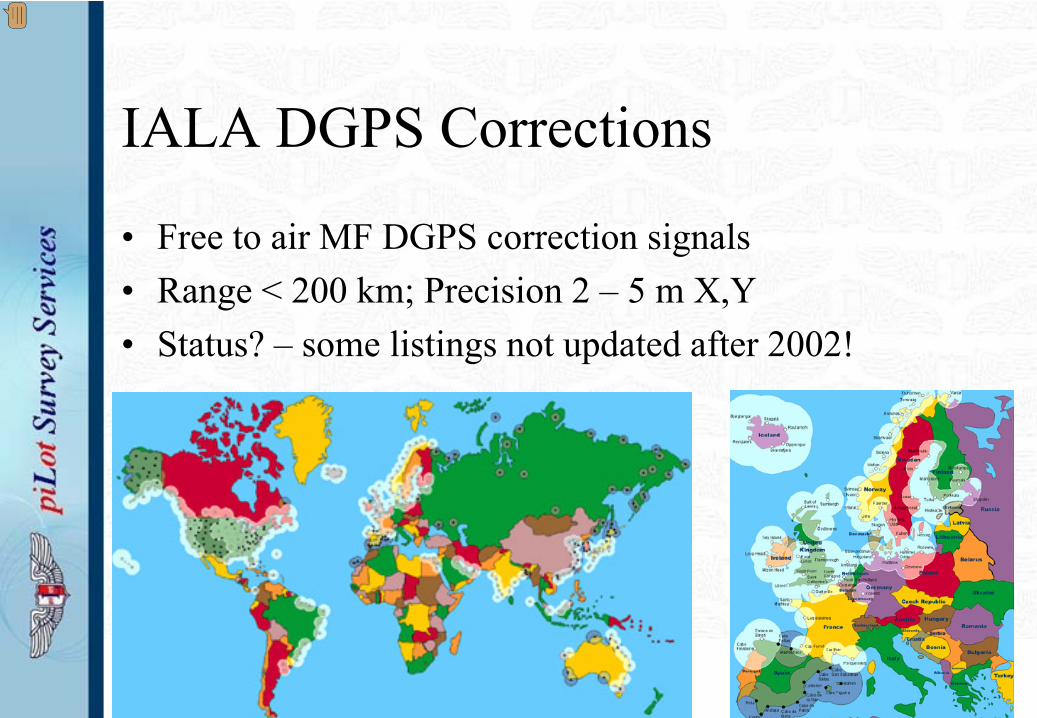
IALA DGPS Corrections
• Free to air MF DGPS correction signals• Range < 200 km; Precision 2 – 5 m X,Y• Status? – some listings not updated after 2002!
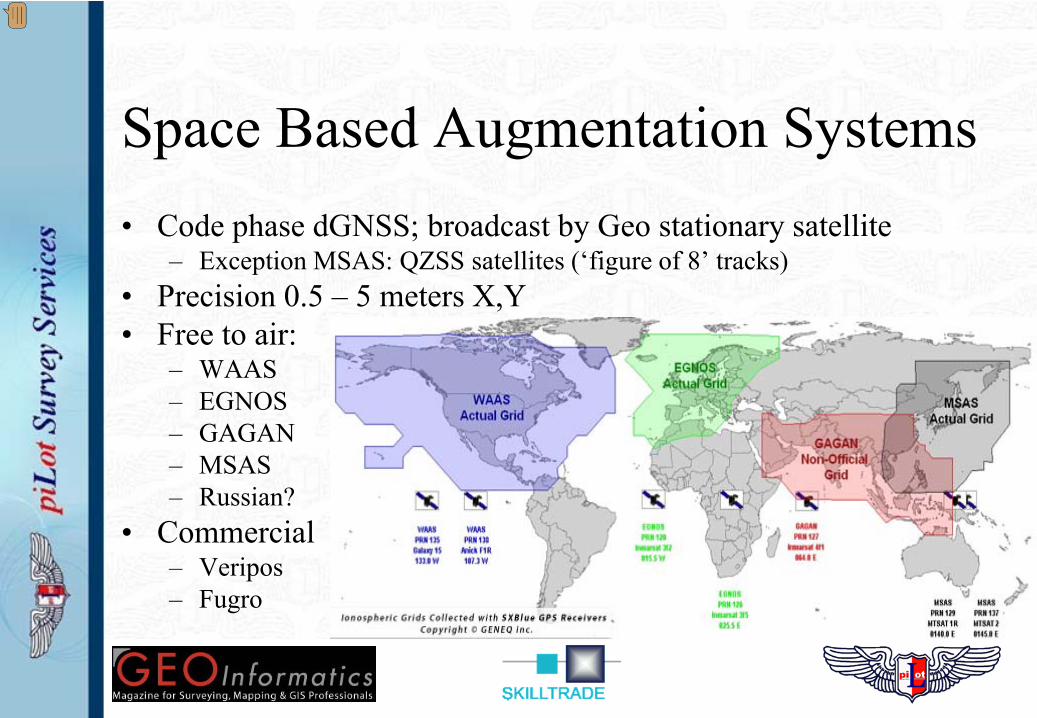
Space Based Augmentation Systems• Code phase dGNSS; broadcast by Geo stationary satellite
– Exception MSAS: QZSS satellites (‘figure of 8’ tracks)• Precision 0.5 – 5 meters X,Y• Free to air:
– WAAS– EGNOS– GAGAN– MSAS– Russian?
• Commercial– Veripos– Fugro
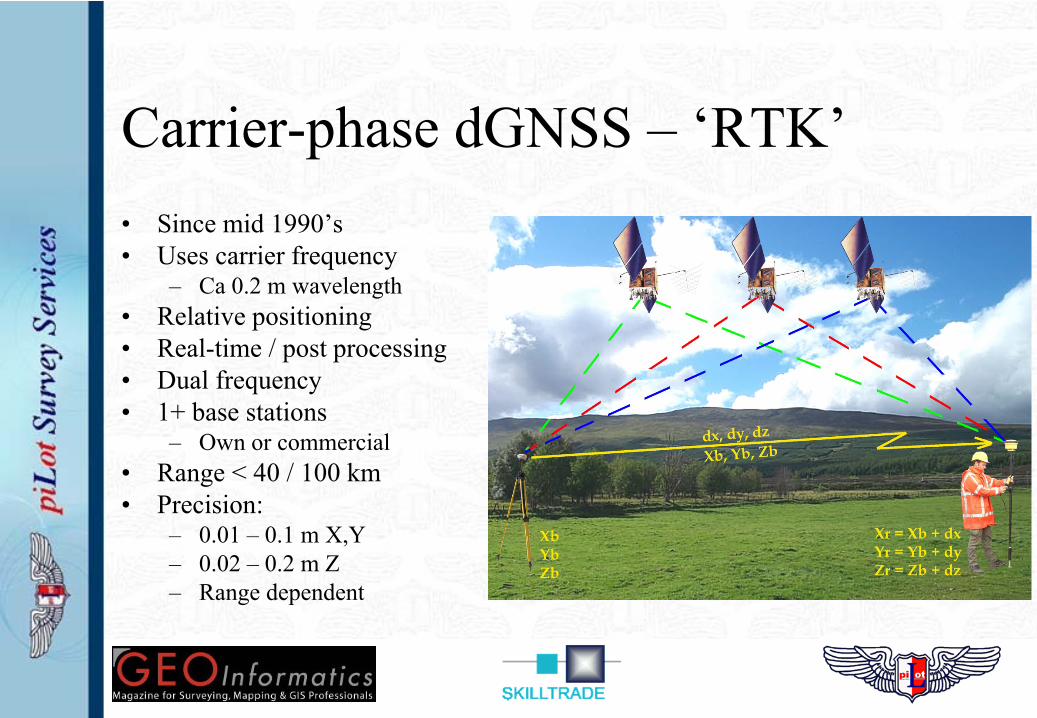
Carrier-phase dGNSS – ‘RTK’• Since mid 1990’s• Uses carrier frequency
– Ca 0.2 m wavelength• Relative positioning• Real-time / post processing• Dual frequency• 1+ base stations
– Own or commercial• Range < 40 / 100 km• Precision:
– 0.01 – 0.1 m X,Y– 0.02 – 0.2 m Z– Range dependent
Precise Point Positioning - PPP• Since early / mid 2000’s• Uses carrier frequency in on-board receiver• Absolute positioning• ‘Near’ real-time / post processing• No base station needed but…
– Needs high accuracy SV parameters (from shore station / post processing)• Range < 2000 km• Time to first (accurate) fix: > 20 minutes• Precision:
– Decimetre level X,Y,Z
Developments in SBAS
• WAAS / EGNOS are fully operational and certified– Egnos only in 2009 certified
• Other free to air systems in ‘build-up’ phase– MSAS: first satellite launched 2010– GAGAN: Satellites under construction
• Commercial systems fully operational– Code phase & PPP dGNSS services:
• Veripos: dGPS & dGlonass• Fugro Starfix / Omnistar: dGPS
Perceived benefits of multiple GNSS
• More satellites on the horizon– Offshore usually > 8 SV’s from GPS alone; little benefit…– Shielding of one GNSS is shielding of all GNSS; little benefit…
• Glonass adds better coverage (> 55°)– Benefits geometry / visibility for operations in the Arctic / Antarctic
• More signals (>2) from single GNSS (e.g. GPS III update)– Provides better ionospheric corrections– Faster carrier phase & PPP calculations
• Glonass is benefit as well as GPS modernization..
“Challenges of multiple GNSS”
• Radiofrequency spectrum• Reference frames
– Time synchronization (GNSS time-frames)– Geodetic parameters (GNSS position-frames)– Geoid – ellipsoid separation
• Vulnerability of GNSS
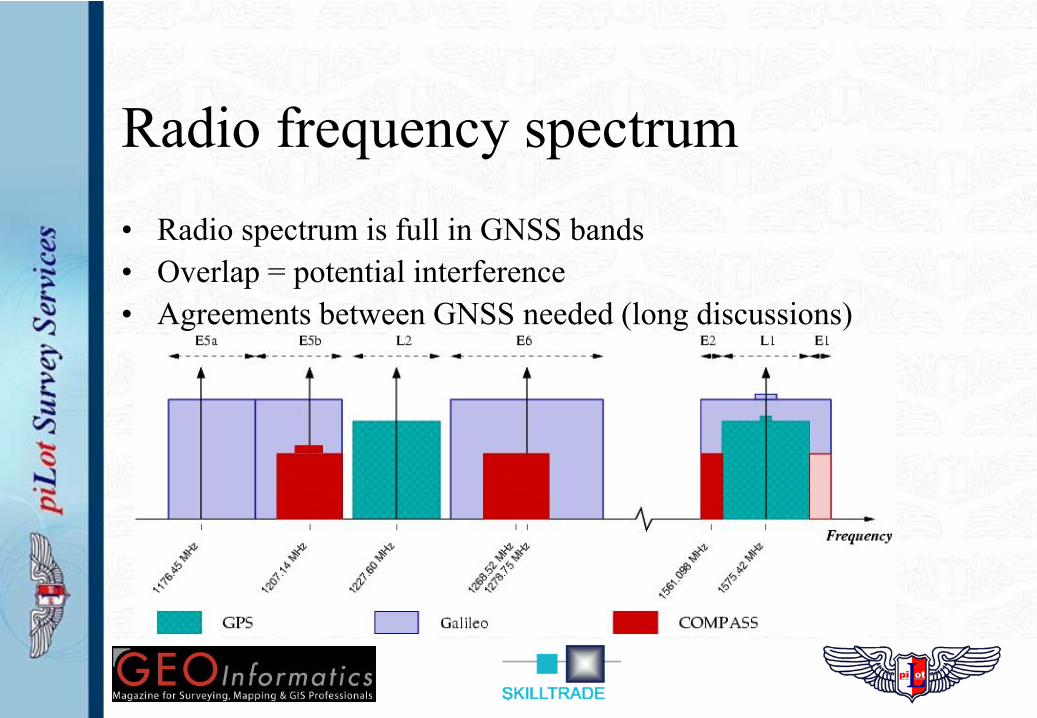
Radio frequency spectrum• Radio spectrum is full in GNSS bands• Overlap = potential interference• Agreements between GNSS needed (long discussions)
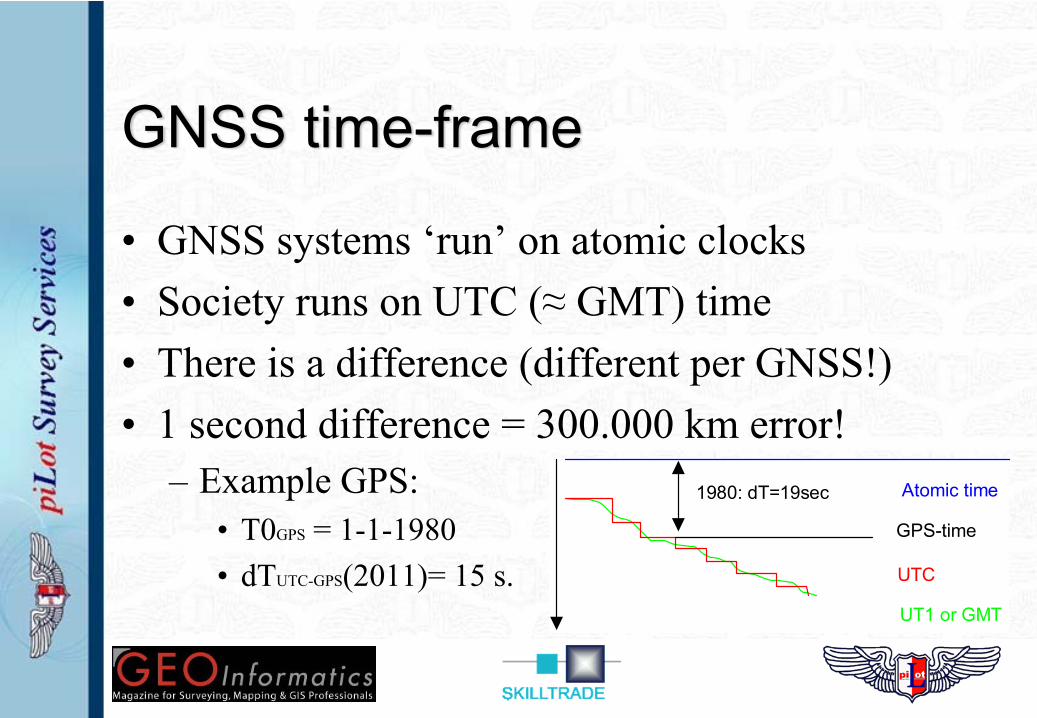
GNSS time-frame
• GNSS systems ‘run’ on atomic clocks• Society runs on UTC (≈ GMT) time• There is a difference (different per GNSS!)• 1 second difference = 300.000 km error!
– Example GPS:• T0GPS = 1-1-1980• dTUTC-GPS(2011)= 15 s.
Atomic time
UT1 or GMT
UTC
1980: dT=19sec
GPS-time
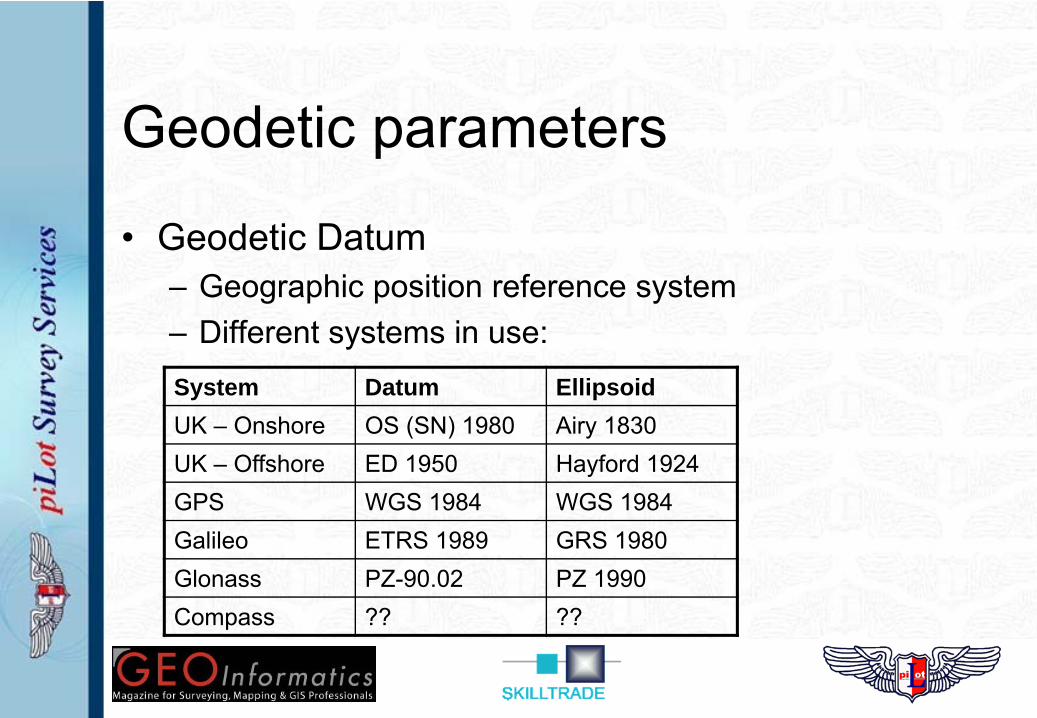
Geodetic parameters
• Geodetic Datum– Geographic position reference system– Different systems in use:System Datum EllipsoidUK – Onshore OS (SN) 1980 Airy 1830UK – Offshore ED 1950 Hayford 1924GPS WGS 1984 WGS 1984Galileo ETRS 1989 GRS 1980Glonass PZ-90.02 PZ 1990Compass ?? ??
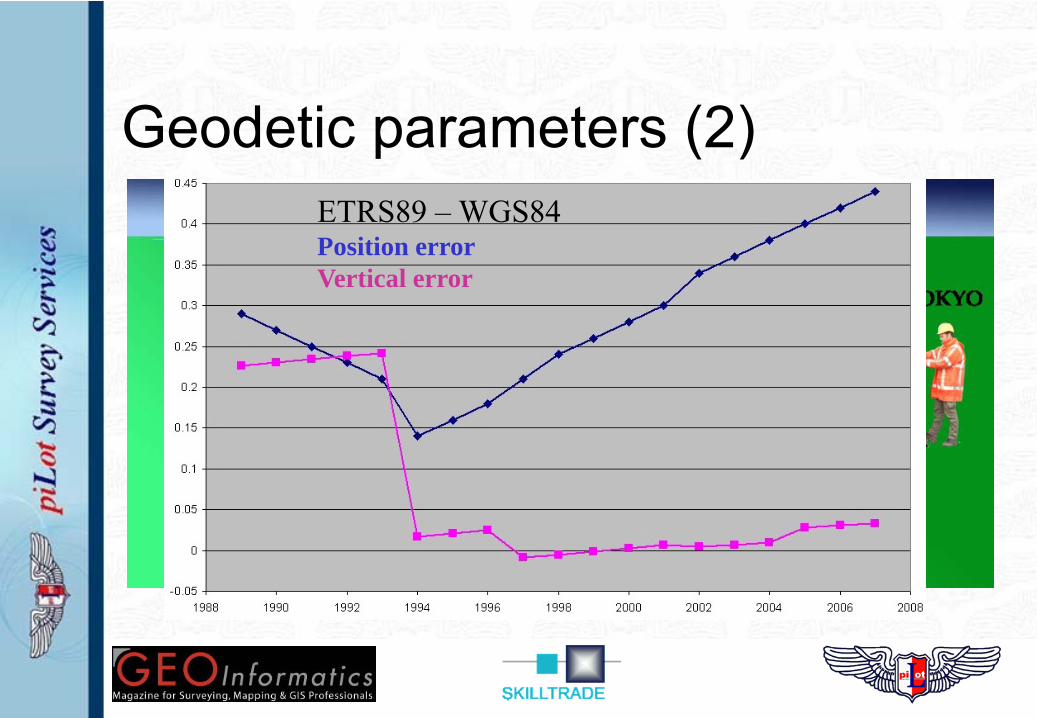
Geodetic parameters (2)– Different geodetic datums -> different positions– Difference between cm’s to 100’s of meters– Needs correction in software / receiver!
• Datum transformation parameters• Receiver / software output in single datum!• Combining datums is ‘tricky business’
ETRS89 – WGS84Position errorVertical error
Vertical Datum• GPS measures height relative to ellipsoid
– Mathematical / smooth surface• Offshore / onshore: tide related datums
– Gravity based surface (‘geoid’)• GPS heights (tides!) need conversion!
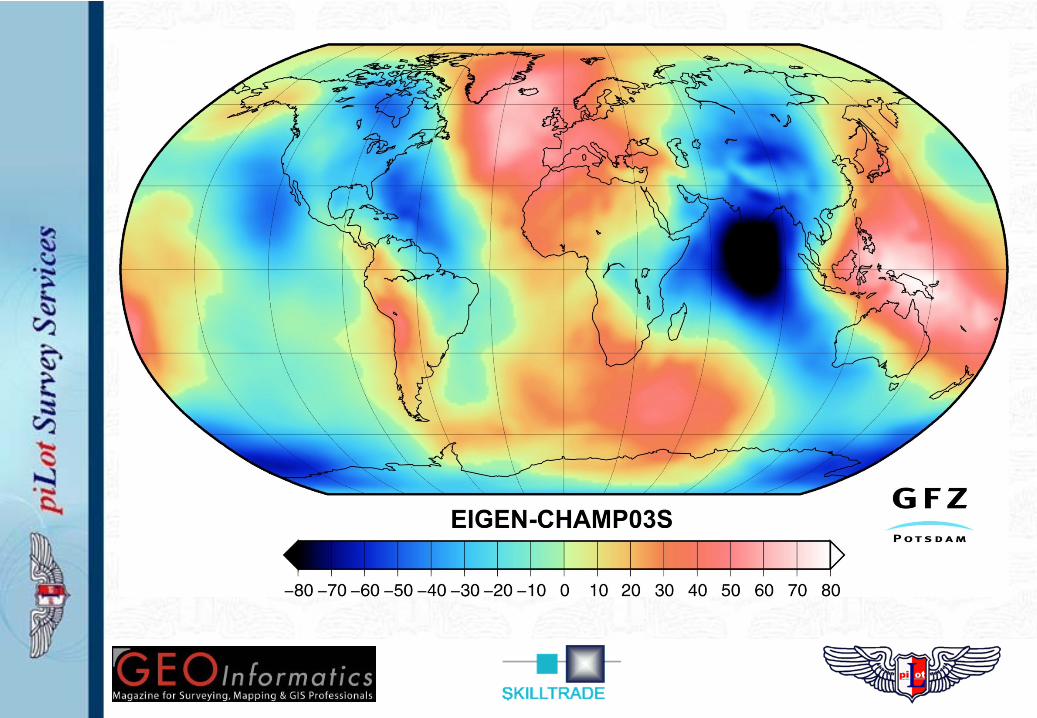
– Ellipsoid – Geoid separation model– Model accuracy: mm to dm level (North sea!)– New models under construction (GOCE)
Vulnerability• GNSS primary means of navigation
– Aircraft: 35% (2010); 75% (2020). Alternatives exist & mandatory.– Ships: 100%. Alternatives – sextant???
• Studies in Europe & USA (Volpe, 2001) indicate:– GNSS systems are easy to jam (disrupt)– GNSS systems can be ‘spoofed’ (false signals)– Jam one – Jam all (same frequency bands)
• Loran-C / e-Loran indicated by studies as alternative– USA & Canada: discontinued in 2010– Europe – operational, but for how long?– Remainder of the world: no coverage!
• On GNSS outages back to the navigation stone age?!
Summary• Multiple GNSS under development• All GNSS are similar in operation & use• Multiple error sources influence precision• dGNSS ‘upgrades’ precision and reliability• GPS modernization & Glonass are benefits
– Other GNSS are ‘political statements’• Some challenges to be solved
• Do we need back-up systems?