Embed Size (px)
Citation preview

Neurocomputing 74 (2011) 563–567
Contents lists available at ScienceDirect
Neurocomputing
0925-23
doi:10.1
� Corr
E-m
journal homepage: www.elsevier.com/locate/neucom
Global impulsive exponential anti-synchronization of delayed chaoticneural networks
Hongyong Zhao �, Qi Zhang
Department of Mathematics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
a r t i c l e i n f o
Article history:
Received 20 January 2010
Received in revised form
17 July 2010
Accepted 13 September 2010
Communicated by N. Ozcan& 2010 Elsevier B.V. All rights reserved.
Available online 20 October 2010
Keywords:
Chaotic neural networks
Anti-synchronization
Impulsive perturbation
Inequality method
Feedback control
12/$ - see front matter & 2010 Elsevier B.V. A
016/j.neucom.2010.09.016
esponding author. Tel.: +86 25 52113704.
ail address: [email protected] (H. Zhao).
a b s t r a c t
In this paper, the impulsive exponential anti-synchronization for chaotic delayed neural networks is
investigated. By establishing an integral delay inequality and using the inequality method, some sufficient
conditions ensuring impulsive exponential anti-synchronization of two chaotic delayed networks are
derived. To illustrate the effectiveness of the new scheme, a numerical example is given.
1. Introduction
Chaos is an interesting phenomenon of nonlinear systems.A chaotic system has some remarkable dynamic characteristics [2].When we use a chaotic signal to drive two identical systems, the twosystems or certain parts of them will have the synchronous behavior.During the last two decades, synchronization of chaotic dynamicsystems has received a great deal of interest among scientists fromvarious research fields [1,3,7,9–11,13,15] since Pecora and Carroll, intheir pioneering work [9], proposed the drive-response concept forconstructing synchronization of coupled chaotic systems.
In recent years, various synchronization phenomena are beingreported for coupled chaotic oscillators, such as generalized synchro-nization [17], lag synchronization [16], and even anti-synchronization[5,6]. Anti-synchronization appears when the sum of two signalsconverges to zero. It is a noticeable phenomenon whereby the statevectors of the synchronized systems have the same amplitude butopposite signs as those of the driving system and has importantapplication significance ([8] and the references therein). Using anti-synchronization to lasers, one may generate not only drop-outs of theintensity as with ordinary low frequency fluctuations but also shortpulses of high intensity, which offers new ways for generating pulsesof special shapes. Using anti-synchronization to communicationsystems, one may transmit digital signals by the transform betweensynchronization and anti-synchronization continuously, which willstrengthen the security and secrecy.
ll rights reserved.
In the same time, in optimal control of signal processing systems,computer networks, automatic control systems, flying object motions,telecommunications, and many systems are characterized by abruptchanges at certain moments due to instantaneous perturbations,which lead to impulsive effects. Mathematically, these systemswith impulsive effects are described by the impulsive differentialequations. Impulsive control synchronization, as a type of synchro-nization, has been developed [4,12,14,18,19].
To the best of our knowledge, for the adaptive anti-synchroni-zation of time-delayed chaotic systems with impulsive effects,there is no result in the literature so far, which still remains openand challenging.
Motivated by the above discussion, this work addresses theexponential anti-synchronization of a class of impulsive perturbedchaotic delayed neural networks. An new integral delay inequalityis established. By employing inequality method [20–24] and theobtained inequality, some simple conditions of impulsive expo-nential anti-synchronization of two coupling chaotic systems arederived. An illustrative example is given to demonstrate theeffectiveness of the presented anti-synchronization scheme.
2. Problem formulation and preliminaries
For convenience, we first introduce some notations used inthis paper.
Rn is the space of n-dimensional real column vectors, Rn�m
denotes the set of n�m real matrices, and Rþ ¼ ½0,þ1Þ.x¼ ðx1, . . . ,xnÞ
T ARn denotes a column vector. JxJ denotes a vectornorm defined by JxJ¼ ð
Pni ¼ 1 jxij
2Þ1=2.
H. Zhao, Q. Zhang / Neurocomputing 74 (2011) 563–567564
Let C(X,Y) denote the space of continuous mappings from thetopological space X to the topological space Y.
PCðJ,RnÞ ¼ fc : J- Rn
jcðsÞ is continuous for all but at most afinite number of points sA J and at these points sA J, cðsþ Þ andcðs�Þ exist, cðsþ Þ ¼cðsÞg, where J�R is a bounded interval, cðsþ Þandcðs�Þdenote the right-hand and left-hand limits of the functioncðsÞ, respectively. In particular, PC9PCð½�t,0�,Rn
Þ, where t40.8j¼ ðj1, . . . ,jnÞ
T APC, JjJt denotes the norm defined byJjJt ¼ sup�tr sr0JjðsÞJ.
For any d¼ ðd1, . . . ,dnÞT ARn, we denote by d ¼maxiA f1,...,ngfdig,
d ¼miniA f1,...,ngfdig.Consider a class of impulsive neural networks model described
by
_xiðtÞ ¼�cixiðtÞþXn
j ¼ 1
aijfjðxjðtÞÞ
þXn
j ¼ 1
bijfjðxjðt�tijðtÞÞÞ, tatk, tZ0,
DxiðtkÞ ¼ xiðtkÞ�xiðt�k Þ ¼ hikxiðt
�k Þ, t¼ tk, k¼ 1,2, . . . ,
xiðtÞ ¼fiðtÞ, tA ½�t,0�, i¼ 1, . . . ,n,
8>>>>>>>>>><>>>>>>>>>>:
ð2:1Þ
where xi denotes the state variable associated with ith neuron andfj(xj (t)) is the output of the jth neuron of the network. ci40represents the rate with which the ith unit will reset its potential tothe resting state in isolation when disconnection from the networkand the external inputs. aij, bij denote the strengths of connectivitybetween the cell i and j at time t and at time t�tijðtÞ, respectively.tijðtÞ are time-varying delays of the neural network satisfying0rtijðtÞrt. hik is the impulsive controller. The impulsive time tk,k¼1,2,yare constants and satisfy 0¼ t0ot1o � � �otkotkþ1o � � �with tk-1 as k-1. fðtÞ ¼ ðf1ðtÞ, . . . ,fnðtÞÞ
T APC and JfJtoþ1.System (2.1) is considered as drive system. And the response
system for (2.1) is constructed as follows
_yiðtÞ ¼ �ciyiðtÞþXn
j ¼ 1
aijfjðyjðtÞÞþXn
j ¼ 1
bijfjðyjðt�tijðtÞÞÞ
þXn
j ¼ 1
kð1Þij ðxjðtÞþyjðtÞÞ
þXn
j ¼ 1
kð2Þij ðxjðt�tijðtÞÞþyjðt�tijðtÞÞÞ, tatk, tZ0,
DyiðtkÞ ¼ yiðtkÞ�yiðt�k Þ ¼ hikyiðt
�k Þ, t¼ tk, k¼ 1,2, . . . ,
yiðtÞ ¼ciðtÞ, tA ½�t,0�, i¼ 1, . . . ,n,
8>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>:
ð2:2Þ
where K ð1Þ ¼ ðkð1Þij Þn�n and K ð2Þ ¼ ðkð2Þij Þn�n are real controller gainmatrices. cðtÞ ¼ ðc1ðtÞ, . . . ,cnðtÞÞ
T APC and JcJtoþ1.Letting eiðtÞ ¼ xiðtÞþyiðtÞ be the anti-synchronization error,
where eðtÞ ¼ ðe1ðtÞ, . . . ,enðtÞÞT , xi(t) and yi(t) are the state variables
of drive system (2.1) and response system (2.2). Thus, we can derivethe error dynamical system as follows:
_eiðtÞ ¼�cieiðtÞþXn
j ¼ 1
aijgjðejðtÞÞþXn
j ¼ 1
bijgjðejðt�tijðtÞÞÞ
þXn
j ¼ 1
kð1Þij ejðtÞþXn
j ¼ 1
kð2Þij ejðt�tijðtÞÞ, tatk, tZ0,
DeiðtkÞ ¼ eiðtkÞ�eiðt�k Þ ¼ hikeiðt
�k Þ, t¼ tk, k¼ 1,2, . . . ,
eiðtÞ ¼fiðtÞþciðtÞ, tA ½�t,0�,
8>>>>>>>>>><>>>>>>>>>>:
ð2:3Þ
where gjðejðtÞÞ ¼ fjðxjðtÞÞþ fjðyjðtÞÞ, gjðejðt�tijðtÞÞÞ ¼ fjðxjðt�tijðtÞÞÞ
þ fjðyjðt�tijðtÞÞÞ,i,j¼ 1, . . . ,n.
Definition 2.1 (Meng and Wang [8], Ren and Cao [11]). The drivesystem (2.1) and the response system (2.2) are said to be globallyexponentially anti-synchronized if for a suitably designed feedbackcontroller, for any f,cAPC, there exist constants MZ1 and l40
such that
JeðtÞJ2rMJfþcJ2te�lt , tZ0
the constant l is defined as the globally exponential anti-synchronization rate.
Throughout this paper, we make the following assumption:(H1) The neurons activation functions fið�Þ are Lipschitz-con-
tinuous, that is, there exist constants Li40 such that
jfiðxÞ�fiðyÞjrLijx�yj for all x,yAR, i¼ 1, . . . ,n: ð2:4Þ
Remark 2.1. Since the activation functions fi of the Hopfield neuralnetworks and the cellular neural networks are odd functions [8],according to the assumption (H1), gið�Þ possesses the followingproperties:
jgiðeiðtÞÞjrLijeiðtÞj ð2:5Þ
and
gið0Þ ¼ fiðxiðtÞÞþ fið�xiðtÞÞ ¼ 0, i¼ 1, . . . ,n: ð2:6Þ
Therefore, system (2.3) admits a zero solution eiðtÞ � 0,i¼ 1, . . . ,n.
Remark 2.2. From (H1), we know the problem of anti-synchroni-zation between the drive system (2.1) and the response system(2.2) is shifted into the stability of the anti-synchronization errorsystem (2.3).
In fact, from the analysis above, we can see that (2.1) and (2.2) areexponentially anti-synchronized if and only if the equilibriumpoint of (2.3) is exponentially stable for any bounded initialcondition, eðtÞ ¼fðtÞþcðtÞ, tA ½�t,0� with JfþcJtoþ1. So theglobal impulsive exponential anti-synchronization problemcan be solved if the controller gain matrices K(1) and K(2) aresuitably designed such that the zero solution of (2.3) is globallyexponentially stable.
3. Impulsive anti-synchronization of chaotic system
The following integral delay inequality is necessary to developthe main result in this paper.
Lemma 3.1. For �1osobrþ1, let ui(t) ði¼ 1, . . . ,nÞACð½s,bÞ,RÞ satisfy the following integral delay inequality:
uiðtÞre�biðt�sÞuiðsÞþR ts e�biðt�sÞ
Xn
j ¼ 1
mijujðsÞ
24
þXn
j ¼ 1
Zijujðs�tijðsÞÞ
35ds, tA ½s,bÞ,
uiðsþsÞ ¼jiðsÞ, sA ½�t,0�,
8>>>>>>>>><>>>>>>>>>:
ð3:1Þ
where 0rtijðsÞrt,jðtÞ ¼ ðj1ðtÞ, . . . ,jnðtÞÞT APC, JjJtoþ1,bi,mij,
and Zij (i,j¼1,y,n) are positive constants. We assume that
�biþPn
j ¼ 1ðmijþZijÞo0 and
uiðtÞrM1JjJ2t , tA ½s�t,s�: ð3:2Þ
Then
uiðtÞrM1JjJ2t , tAðs,bÞ, ð3:3Þ
where i¼1,y,n, M1 is a positive constant.
Proof. To prove (3.3), we first prove for any given constant h41,
uiðtÞohM1JjJ2t for tA ½s,bÞ, i¼ 1, . . . ,n: ð3:4Þ

H. Zhao, Q. Zhang / Neurocomputing 74 (2011) 563–567 565
If (3.4) is not true, then there must be t�Aðs,bÞ and some integer
mAf1, . . . ,ng such that
umðt�Þ ¼ hM1JjJ2
t , umðtÞohM1JjJ2t , tA ½s�t,t�Þ ð3:5Þ
and
uiðtÞrhM1JjJ2t , tA ½s�t,t��, i¼ 1, . . . ,n: ð3:6Þ
By using (3.1), (3.2), (3.5), and (3.6), we have
umðt�Þre�bmðt
��sÞumðsÞþZ t�
se�bmðt
��tÞ
�Xn
j ¼ 1
mmjujðtÞþXn
j ¼ 1
Zmjujðt�tÞ
24
35dtoe�bmðt
��sÞhM1JjJ2t
þ
Z t�
se�bmðt
��tÞXn
j ¼ 1
ðmmjþZmjÞhM1JjJ2t dt
r e�bmðt��sÞ þ
1
bm
Xn
j ¼ 1
ðmmjþZmjÞð1�e�bmðt��sÞÞ
8<:
9=;hM1JjJ2
t
ohM1JjJ2t , ð3:7Þ
which implies umðt�ÞohM1JjJ2t , this contradicts the first equality in
(3.5). So (3.4) holds. Let h-1, then (3.3) holds. The proof is
complete. &
We make the following assumption.(H2) There exist positive constants pi, i¼1, y, n, such that
�2ðci�kð1Þii ÞþXn
j ¼ 1
ðjaijjLjþjbijjLjþjkð2Þij jþjk
�ijjÞ
þXn
j ¼ 1
ðjaijjLjþjbijjLjþjkð2Þij jþjk
�ijjÞpip
�1j o0, ð3:8Þ
where k�ij ¼ kð1Þij as ia j, and kij*¼0 as i¼ j.From Lemma 3.1, we have the following result.
Theorem 3.1. If (H1) and (H2) hold. Assume furthermore that system
(2.3) satisfies the following condition:
(H3) Let dkZ1 satisfies the following inequality:
ð1þhikÞ2rdk, i¼ 1, . . . ,n, k¼ 1,2, . . . ð3:9Þ
and there exists a constant aZ0 such that
lndk
tk�tk�1raoe,
where the positive constant e is determined by the following inequality:
�biþXn
j ¼ 1
ðmijþZijÞo0 ð3:10Þ
with bi ¼ 2ðci�kð1Þii Þ�e�Pn
j ¼ 1ðjaijjLjþjbijjLjþjkð2Þij jþjk
�ijjÞ40, mij ¼
ðjaijjLjþjk�ijjÞpip
�1j , Zij ¼ ðjbijjLjþjk
ð2Þij jÞpip
�1j eet, i,j¼1,y,n.
Then the zero solution of (2.3) is globally exponentially stable,
implying that the two systems (2.1) and (2.2) are globally impulsively
exponentially anti-synchronized.
Proof. From the condition (H2) and by using continuity, we knowthat (3.10) has at least one positive solution e. Let
uiðtÞ ¼ eetpie2i ðtÞ, i¼ 1, . . . ,n: ð3:11Þ
Calculating the upper right derivative DþuiðtÞ along the solutions
of (2.3). From the condition (H1), we know for tAðtk�1,tkÞ,
i¼ 1, . . . ,n, k¼ 1, . . .,
DþuiðtÞ ¼ eeetpie2i ðtÞþ2eetpieiðtÞ_eiðtÞ
¼ euiðtÞþ2eetpieiðtÞ �cieiðtÞþXn
j ¼ 1
aijgjðejðtÞÞ
8<:
þXn
j ¼ 1
bijgjðejðt�tijðtÞÞÞþXn
j ¼ 1
kð1Þij ejðtÞþXn
j ¼ 1
kð2Þij ejðt�tijðtÞÞ
9=;
reuiðtÞþ2eetpieiðtÞ �ðci�kð1Þii ÞeiðtÞþXn
j ¼ 1
jaijjLjjejðtÞj
8<:
þXn
j ¼ 1
jbijjLjjejðt�tijðtÞÞjþXn
j ¼ 1,ja i
jkð1Þij jjejðtÞj
þXn
j ¼ 1
jkð2Þij jjejðt�tijðtÞÞj
9=;
reuiðtÞþ �2ðci�kð1Þii ÞuiðtÞþXn
j ¼ 1
jaijjLjeetpiðe
2i ðtÞþe2
j ðtÞÞ
8<:
þXn
j ¼ 1
jbijjLjeetpiðe
2i ðtÞþe2
j ðt�tijðtÞÞÞþXn
j ¼ 1,ja i
jkð1Þij jeetpiðe
2i ðtÞ
þe2j ðtÞÞþ
Xn
j ¼ 1
jkð2Þij jeetpiðe
2i ðtÞþe2
j ðt�tijðtÞÞÞ
9=;
r �2ðci�kð1Þii ÞþeþXn
j ¼ 1
ðjaijjLjþjbijjLjþjkð2Þij jþjk
�ijjÞ
24
35uiðtÞ
þXn
j ¼ 1
½jaijjLjpip�1j þjk
�ijjpip
�1j �ujðtÞ
þXn
j ¼ 1
ðjbijjLjpip�1j þjk
ð2Þij jpip
�1j Þe
etujðt�tijðtÞÞ
¼�biuiðtÞþXn
j ¼ 1
mijujðtÞþXn
j ¼ 1
Zijujðt�tijðtÞÞ: ð3:12Þ
Thus we have
uiðtÞre�bituið0Þþ
Z t
0e�biðt�sÞ
Xn
j ¼ 1
mijujðsÞþXn
j ¼ 1
Zijujðs�tijðsÞÞ
24
35ds
with the initial condition uiðtÞ ¼jiðtÞ,tA ½�t,0�, jiðtÞ ¼fiðtÞ
þciðtÞ, i¼ 1, . . . ,n.
For the initial condition jðtÞ ¼ ðj1ðtÞ, . . . ,jnðtÞÞT APC, we can get
uiðtÞ ¼ eetpie2i ðtÞrpie
2i ðtÞ ¼ pijfiðtÞþciðtÞj
2
rpiJjJ2t , �trtr0, i¼ 1, . . . ,n: ð3:13Þ
So all the conditions of Lemma 3.1 hold. Then we obtain that
uiðtÞrpiJjJ2t , tA ½0,t1Þ, i¼ 1, . . . ,n: ð3:14Þ
In the following, we will use the mathematical induction to prove
uiðtÞrd0d1 � � � dk�1piJjJ2t , tA ½tk�1,tkÞ, i¼ 1, . . . ,n, k¼ 1,2, . . . ,
ð3:15Þ
where d0 ¼ 1.
When k¼1, we know from (3.14) that (3.15) holds. Suppose that
the inequalities
uiðtÞrd0d1 � � � dk�1piJjJ2t , tA ½tk�1,tkÞ, i¼ 1, . . . ,n, k¼ 1, . . . ,m
ð3:16Þ
hold.
H. Zhao, Q. Zhang / Neurocomputing 74 (2011) 563–567566
From (H3) and (3.11), we have
uiðtmÞ ¼ eetm pie2i ðtmÞ ¼ eetm pið1þhimÞ
2e2i ðt�mÞreetmdmpie
2i ðt�mÞ
¼ dmuiðt�mÞrd0d1 � � �dm�1dmpiJjJ2
t , i¼ 1, . . . ,n:
This, together with (3.16), leads to
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−5
−4
−3
−2
−1
0
1
2
3
4
5
x1(t)
x2(t)
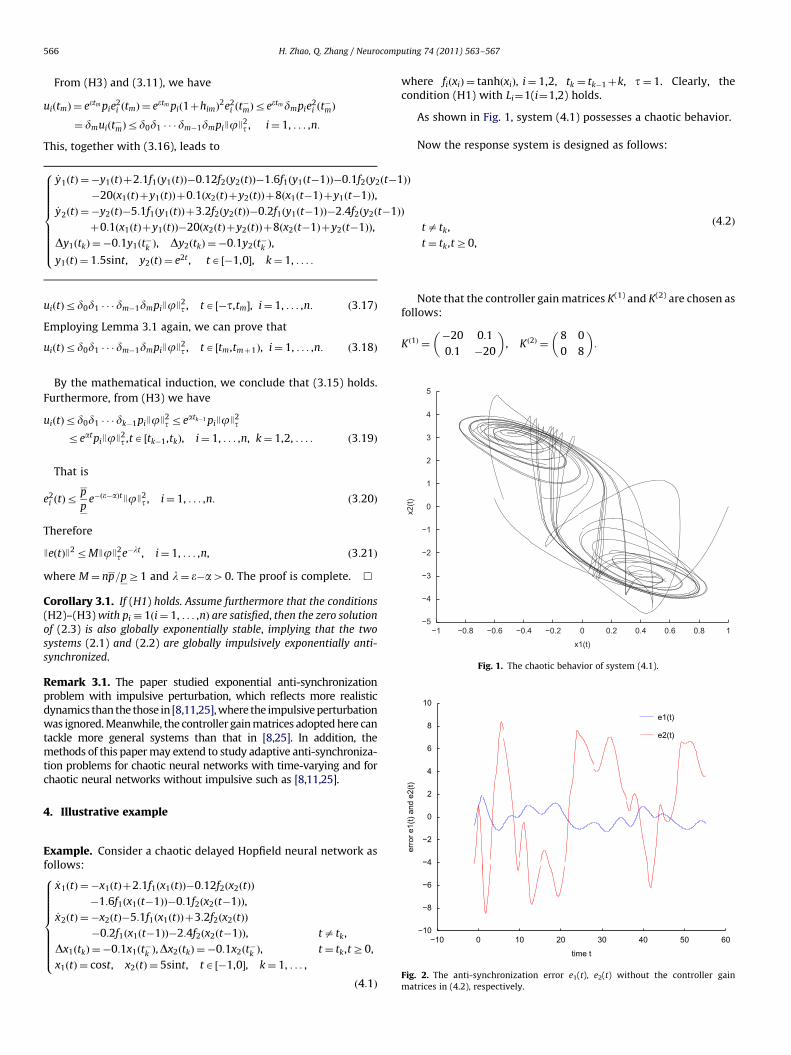
Fig. 1. The chaotic behavior of system (4.1).
_y1ðtÞ ¼�y1ðtÞþ2:1f1ðy1ðtÞÞ�0:12f2ðy2ðtÞÞ�1:6f1ðy1ðt�1ÞÞ�0:1f2ðy2ðt�1ÞÞ
�20ðx1ðtÞþy1ðtÞÞþ0:1ðx2ðtÞþy2ðtÞÞþ8ðx1ðt�1Þþy1ðt�1ÞÞ,
_y2ðtÞ ¼�y2ðtÞ�5:1f1ðy1ðtÞÞþ3:2f2ðy2ðtÞÞ�0:2f1ðy1ðt�1ÞÞ�2:4f2ðy2ðt�1ÞÞ
þ0:1ðx1ðtÞþy1ðtÞÞ�20ðx2ðtÞþy2ðtÞÞþ8ðx2ðt�1Þþy2ðt�1ÞÞ, tatk,
Dy1ðtkÞ ¼ �0:1y1ðt�k Þ, Dy2ðtkÞ ¼ �0:1y2ðt
�k Þ, t¼ tk,tZ0,
y1ðtÞ ¼ 1:5sint, y2ðtÞ ¼ e2t , tA ½�1,0�, k¼ 1, . . . :
8>>>>>>>>><>>>>>>>>>:
ð4:2Þ
0
2
4
6
8
10
t) an
d e2
(t)
e1(t)
e2(t)
uiðtÞrd0d1 � � � dm�1dmpiJjJ2t , tA ½�t,tm�, i¼ 1, . . . ,n: ð3:17Þ
Employing Lemma 3.1 again, we can prove that
uiðtÞrd0d1 � � � dm�1dmpiJjJ2t , tA ½tm,tmþ1Þ, i¼ 1, . . . ,n: ð3:18Þ
By the mathematical induction, we conclude that (3.15) holds.
Furthermore, from (H3) we have
uiðtÞrd0d1 � � � dk�1piJjJ2treatk�1 piJjJ2
t
reatpiJjJ2t ,tA ½tk�1,tkÞ, i¼ 1, . . . ,n, k¼ 1,2, . . . : ð3:19Þ
That is
e2i ðtÞr
p
pe�ðe�aÞtJjJ2
t , i¼ 1, . . . ,n: ð3:20Þ
Therefore
JeðtÞJ2rMJjJ2te�lt , i¼ 1, . . . ,n, ð3:21Þ
where M¼ np=pZ1 and l¼ e�a40. The proof is complete. &
Corollary 3.1. If (H1) holds. Assume furthermore that the conditions
(H2)–(H3) with pi � 1ði¼ 1, . . . ,nÞ are satisfied, then the zero solution
of (2.3) is also globally exponentially stable, implying that the two
systems (2.1) and (2.2) are globally impulsively exponentially anti-
synchronized.
Remark 3.1. The paper studied exponential anti-synchronizationproblem with impulsive perturbation, which reflects more realisticdynamics than the those in [8,11,25], where the impulsive perturbationwas ignored. Meanwhile, the controller gain matrices adopted here cantackle more general systems than that in [8,25]. In addition, themethods of this paper may extend to study adaptive anti-synchroniza-tion problems for chaotic neural networks with time-varying and forchaotic neural networks without impulsive such as [8,11,25].
4. Illustrative example
−10 0 10 20 30 40 50 60−10
−8
−6
−4
−2
time t
erro
r e1(
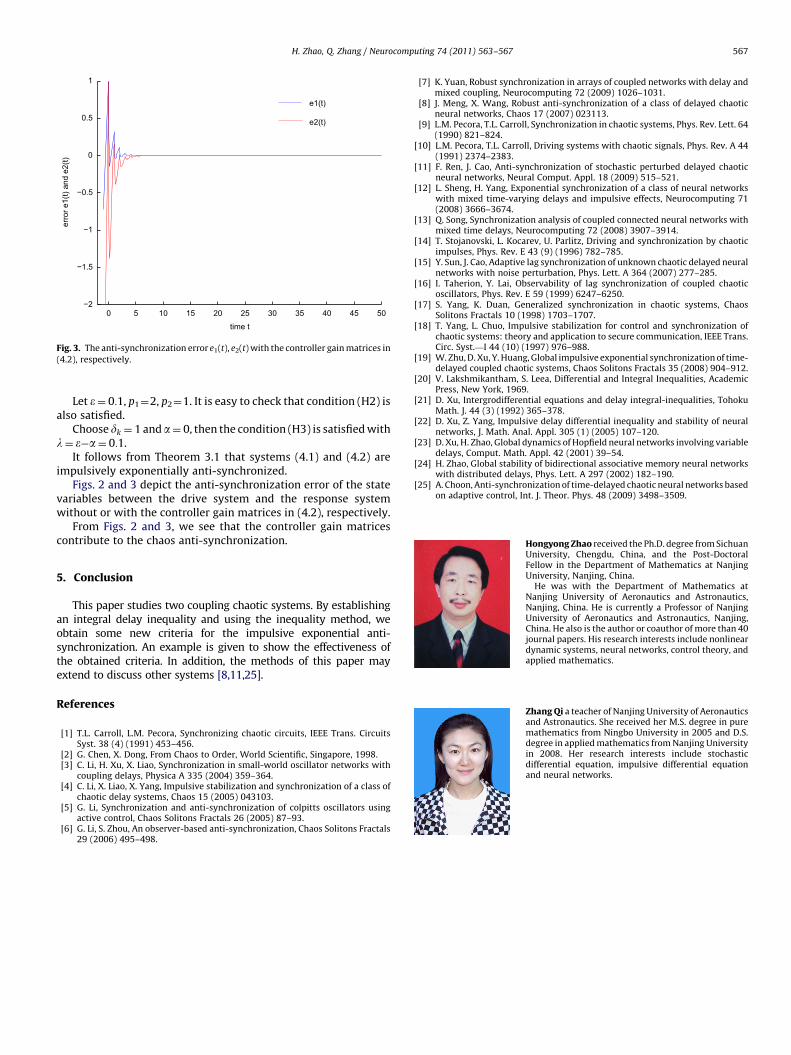
Fig. 2. The anti-synchronization error e1(t), e2(t) without the controller gain
matrices in (4.2), respectively.
Example. Consider a chaotic delayed Hopfield neural network asfollows:
_x1ðtÞ ¼�x1ðtÞþ2:1f1ðx1ðtÞÞ�0:12f2ðx2ðtÞÞ
�1:6f1ðx1ðt�1ÞÞ�0:1f2ðx2ðt�1ÞÞ,
_x2ðtÞ ¼�x2ðtÞ�5:1f1ðx1ðtÞÞþ3:2f2ðx2ðtÞÞ
�0:2f1ðx1ðt�1ÞÞ�2:4f2ðx2ðt�1ÞÞ, tatk,
Dx1ðtkÞ ¼�0:1x1ðt�k Þ,Dx2ðtkÞ ¼�0:1x2ðt
�k Þ, t¼ tk,tZ0,
x1ðtÞ ¼ cost, x2ðtÞ ¼ 5sint, tA ½�1,0�, k¼ 1, . . . ,
8>>>>>>>>><>>>>>>>>>:
ð4:1Þ
where fiðxiÞ ¼ tanhðxiÞ, i¼ 1,2, tk ¼ tk�1þk, t¼ 1. Clearly, thecondition (H1) with Li¼1(i¼1,2) holds.
As shown in Fig. 1, system (4.1) possesses a chaotic behavior.
Now the response system is designed as follows:
Note that the controller gain matrices K(1) and K(2) are chosen asfollows:
K ð1Þ ¼�20 0:1
0:1 �20
� �, K ð2Þ ¼
8 0
0 8
� �:
0 5 10 15 20 25 30 35 40 45 50−2
−1.5
−1
−0.5
0
0.5
1
time t
erro
r e1(
t) an
d e2
(t)
e1(t)
e2(t)
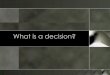
Fig. 3. The anti-synchronization error e1(t), e2(t) with the controller gain matrices in
(4.2), respectively.
H. Zhao, Q. Zhang / Neurocomputing 74 (2011) 563–567 567
Let e¼ 0:1, p1¼2, p2¼1. It is easy to check that condition (H2) isalso satisfied.
Choose dk ¼ 1 and a¼ 0, then the condition (H3) is satisfied withl¼ e�a¼ 0:1.
It follows from Theorem 3.1 that systems (4.1) and (4.2) areimpulsively exponentially anti-synchronized.
Figs. 2 and 3 depict the anti-synchronization error of the statevariables between the drive system and the response systemwithout or with the controller gain matrices in (4.2), respectively.
From Figs. 2 and 3, we see that the controller gain matricescontribute to the chaos anti-synchronization.
5. Conclusion
This paper studies two coupling chaotic systems. By establishingan integral delay inequality and using the inequality method, weobtain some new criteria for the impulsive exponential anti-synchronization. An example is given to show the effectiveness ofthe obtained criteria. In addition, the methods of this paper mayextend to discuss other systems [8,11,25].
References
[1] T.L. Carroll, L.M. Pecora, Synchronizing chaotic circuits, IEEE Trans. CircuitsSyst. 38 (4) (1991) 453–456.
[2] G. Chen, X. Dong, From Chaos to Order, World Scientific, Singapore, 1998.[3] C. Li, H. Xu, X. Liao, Synchronization in small-world oscillator networks with
coupling delays, Physica A 335 (2004) 359–364.[4] C. Li, X. Liao, X. Yang, Impulsive stabilization and synchronization of a class of
chaotic delay systems, Chaos 15 (2005) 043103.[5] G. Li, Synchronization and anti-synchronization of colpitts oscillators using
active control, Chaos Solitons Fractals 26 (2005) 87–93.[6] G. Li, S. Zhou, An observer-based anti-synchronization, Chaos Solitons Fractals
29 (2006) 495–498.
[7] K. Yuan, Robust synchronization in arrays of coupled networks with delay andmixed coupling, Neurocomputing 72 (2009) 1026–1031.
[8] J. Meng, X. Wang, Robust anti-synchronization of a class of delayed chaoticneural networks, Chaos 17 (2007) 023113.
[9] L.M. Pecora, T.L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett. 64(1990) 821–824.
[10] L.M. Pecora, T.L. Carroll, Driving systems with chaotic signals, Phys. Rev. A 44(1991) 2374–2383.
[11] F. Ren, J. Cao, Anti-synchronization of stochastic perturbed delayed chaoticneural networks, Neural Comput. Appl. 18 (2009) 515–521.
[12] L. Sheng, H. Yang, Exponential synchronization of a class of neural networkswith mixed time-varying delays and impulsive effects, Neurocomputing 71(2008) 3666–3674.
[13] Q. Song, Synchronization analysis of coupled connected neural networks withmixed time delays, Neurocomputing 72 (2008) 3907–3914.
[14] T. Stojanovski, L. Kocarev, U. Parlitz, Driving and synchronization by chaoticimpulses, Phys. Rev. E 43 (9) (1996) 782–785.
[15] Y. Sun, J. Cao, Adaptive lag synchronization of unknown chaotic delayed neuralnetworks with noise perturbation, Phys. Lett. A 364 (2007) 277–285.
[16] I. Taherion, Y. Lai, Observability of lag synchronization of coupled chaoticoscillators, Phys. Rev. E 59 (1999) 6247–6250.
[17] S. Yang, K. Duan, Generalized synchronization in chaotic systems, ChaosSolitons Fractals 10 (1998) 1703–1707.
[18] T. Yang, L. Chuo, Impulsive stabilization for control and synchronization ofchaotic systems: theory and application to secure communication, IEEE Trans.Circ. Syst.—I 44 (10) (1997) 976–988.
[19] W. Zhu, D. Xu, Y. Huang, Global impulsive exponential synchronization of time-delayed coupled chaotic systems, Chaos Solitons Fractals 35 (2008) 904–912.
[20] V. Lakshmikantham, S. Leea, Differential and Integral Inequalities, AcademicPress, New York, 1969.
[21] D. Xu, Intergrodifferential equations and delay integral-inequalities, TohokuMath. J. 44 (3) (1992) 365–378.
[22] D. Xu, Z. Yang, Impulsive delay differential inequality and stability of neuralnetworks, J. Math. Anal. Appl. 305 (1) (2005) 107–120.
[23] D. Xu, H. Zhao, Global dynamics of Hopfield neural networks involving variabledelays, Comput. Math. Appl. 42 (2001) 39–54.
[24] H. Zhao, Global stability of bidirectional associative memory neural networkswith distributed delays, Phys. Lett. A 297 (2002) 182–190.
[25] A. Choon, Anti-synchronization of time-delayed chaotic neural networks basedon adaptive control, Int. J. Theor. Phys. 48 (2009) 3498–3509.
Hongyong Zhao received the Ph.D. degree from SichuanUniversity, Chengdu, China, and the Post-DoctoralFellow in the Department of Mathematics at NanjingUniversity, Nanjing, China.
He was with the Department of Mathematics atNanjing University of Aeronautics and Astronautics,Nanjing, China. He is currently a Professor of NanjingUniversity of Aeronautics and Astronautics, Nanjing,China. He also is the author or coauthor of more than 40journal papers. His research interests include nonlineardynamic systems, neural networks, control theory, andapplied mathematics.
Zhang Qi a teacher of Nanjing University of Aeronauticsand Astronautics. She received her M.S. degree in puremathematics from Ningbo University in 2005 and D.S.degree in applied mathematics from Nanjing Universityin 2008. Her research interests include stochasticdifferential equation, impulsive differential equationand neural networks.



![Deterministic coherence resonance in coupled chaotic oscillators …oa.upm.es/43626/1/INVE_MEM_2015_235730.pdf · 2016. 10. 17. · with delayed feedback [15–17] including diffusively](https://img.pdfslide.us/doc/110x75/610c964043cc3e504a75bf09/deterministic-coherence-resonance-in-coupled-chaotic-oscillators-oaupmes436261invemem2015.jpg)






![Impulsive mean square exponential synchronization of ... · considered impulsive delay. In [31], the stochastic synchronization problem has been stud-ied for a class of delayed dynamical](https://img.pdfslide.us/doc/110x75/5e1683a78c0e1a2afa48b650/impulsive-mean-square-exponential-synchronization-of-considered-impulsive-delay.jpg)














![[Murrey Jeneth] Impulsive Proposal](https://img.pdfslide.us/doc/110x75/563db8ff550346aa9a99002a/murrey-jeneth-impulsive-proposal.jpg)


