Embed Size (px)
Citation preview

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Global flow of the parabolic restricted three bodyproblem
E. Barrabes 1 J.M. Cors 2 L. Garcia1 M. Olle2
1Universitat de Girona
2Universitat Politecnica de Catalunya
Ddays 2016
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 1 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Outline
Introduction
Dynamics of the parabolic problem
Numerical results
Conclusions
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 2 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
N-Body Problem
N-body problem: N point masses mi, i = 1, . . . N moving under theirgravitational atractions
miqi =
n∑j=1j 6=i
Gmimj(qj − qi)
r3ij
2-body problem: integrable problem. The masses move in Keplerianorbits: elliptic, parabolic or hyperbolic, around their center of mass.
Restricted Three-Body problem: Two main bodies (primaries) moving ina keplerian orbit + massless particle moving under the gravitationalattraction of the primaries, without affecting them.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 3 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
N-Body Problems
Main tools of the dynamical systems
Hamiltonian formulation:
z = J · ∇H(z)
Invariant objects: equilibrium points, periodic and quasi-periodic orbits
Stability of the invariant objects
Invariant manifolds:
Wu(Γ) = z(t); z(t) −→t−∞
Γ
W s(Γ) = z(t); z(t) −→t+∞
Γ
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 4 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Galactic encounters: bridges and tails
10
NGC 2535/6 NGC 7752/3
astromania.deyave.com/ www.etsu.edu/physics/bsmith/research/sg/arp.html www.spiral-galaxies.com/Galaxies-Pegasus.html
NGC 3808
Bridges!
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 5 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Galactic encounters: bridges and tails
9
Tails!
Arp 173
• NGC 2992/3
http://www.astrooptik.com/Bildergalerie/PolluxGallery/NGC2623.htm www.etsu.edu/physics/bsmith/research/sg/arp.html
http://www.ess.sunysb.edu/fwalter/SMARTS/findingcharts.html
NGC 2623
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 5 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
Motivations and Aims
Close approach of two galaxies: it causes significant modification of themass distribution or disc structure. One particle that initially stays in onegalaxy (or around one star), after the close encounter, it can jump to theother galaxy or escape.
To study the mechanisms that explain that a particle remains or notaround each galaxy, considering a very simple model: the planarparabolic restricted three-body problem.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 6 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
Outline
Introduction
Dynamics of the parabolic problem
Numerical results
Conclusions
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 7 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
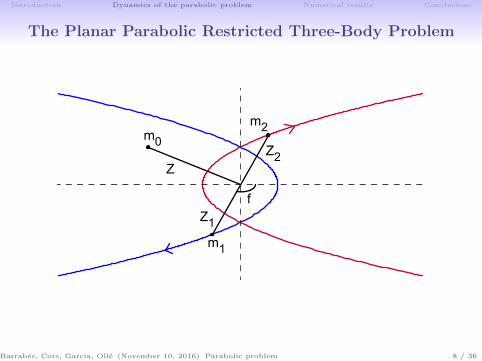
The Planar Parabolic Restricted Three-Body Problem
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 8 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Equations (I)
Parabolic problem:
d2Z
dt2= −(1− µ)
Z− Z1
|Z− Z1|3− µ Z− Z2
|Z− Z2|3,
Z2 = −Z1 = 12 (σ2 − 1, 2σ), and σ = tan(f/2)
Change to a synodic frame (primaries at fixed positions) + change of time:
z1 = (−1
2, 0), z2 = (
1
2, 0),
dt
ds=√
2 r3/2.
Compatification to extend the flow when the primaries are at infinity(t, s→ ±∞):
sin(θ) = tanh(s).
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 9 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Equations (II)
Global system
θ′ = cos θ,z′ = w,w′ = −A(θ)w +∇Ω(z)
where ′ =d
dsand
A(θ) =
(sin θ 4 cos θ−4 cos θ sin θ
),
Ω(z) = x2 + y2 + 21− µ√
(x− µ)2 + y2+ 2
µ√(x− µ+ 1)2 + y2
.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 10 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Upper and Lower boundary problems
Global system Boundary problems θ′ = cos θ,z′ = w,w′ = −A(θ)w +∇Ω(z)
−→θ=±π/2
z′ = w,w′ = ∓w +∇Ω(z)
dim 5 dim 4
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 11 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
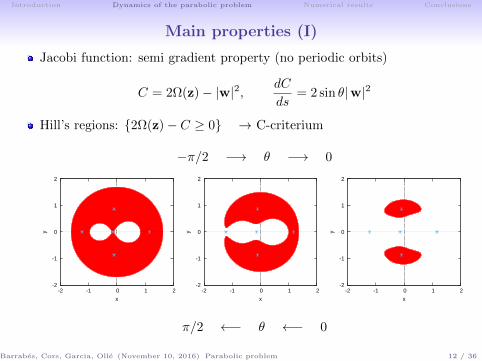
Main properties (I)
Jacobi function: semi gradient property (no periodic orbits)
C = 2Ω(z)− |w|2, dC
ds= 2 sin θ|w|2
Hill’s regions: 2Ω(z)− C ≥ 0 → C-criterium
−π/2 −→ θ −→ 0
-2
-1
0
1
2
-2 -1 0 1 2
y
x
-2
-1
0
1
2
-2 -1 0 1 2
y
x
-2
-1
0
1
2
-2 -1 0 1 2
y
x
π/2 ←− θ ←− 0
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 12 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Main properties (II)
Equilibrium points at the boundaries (as in the RTBP):
Collinear: L±i = (xi(µ), 0, 0, 0,±π/2), i = 1, 2, 3
Triangular: L±i = (µ− 12 ,±√
3/2, 0, 0,±π/2), i = 4, 5
Stability:
L+1,2,3 L+
4,5
dim(Wu) 1 2dim(W s) 4 3
L−1,2,3 L−4,5dim(Wu) 4 3dim(W s) 1 2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 13 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Main properties (II)
Equilibrium points at the boundaries: L±i , i = 1, ..., 5 for θ = ±π/2 andµ = 1/2
(xi, yi) C(L±i ) = CiL±1 (−1.198406145, 0) 6.91359245
L±2 (0, 0) 8
L±3 (1.198406145, 0) 6.91359245
L±4,5 (0,±√
3/2) 5.5
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 14 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Main properties (III)
Homothetic solutions and connections
θ = π/2
θ = −π/2
θ = 0
L+1
L+4
L+3
L−3L−
4
L−1
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 15 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Dynamics of the problem
In order to describe the dynamics of the parabolic problem, we will focus ontwo aspects:
the final evolutions in the synodical system when time tends to infinity,
the richness in the intermediate stages due to
existence of invariant manifolds associated with the homothetic solutions
heteroclinic connections that allow the existence of orbits with passagesclose to collinear and/or equilateral configurations.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 16 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Final evolutions
Proposition (Final evolutions)
Let γ(s) = (θ(s), z(s),w(s)), s ∈ [0,∞), be a solution ofthe global system. Then, either:
it is a collision orbit,
lims→∞ |z(s)| =∞ (escape orbit)
its ω-limit is an equilibrium point.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 17 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Final evolutions
DefinitionLet Z(t) be a solution of the parabolic problem. We say that
it is a capture orbit around the primary of mass mi, fori = 1 or 2, if lim supt→∞ |Z(t)− Zi(t)| ≤ K, for someconstant K;
it is an escape orbit if lim supt→∞ |Z(t)| =∞ andlim supt→∞ |Z(t)− Zi(t)| =∞ for i = 1 and 2.
Remark: the definition is given in the inertial frame: |Z− Zi| = r|z− zi|capture orbit → |z− zi| → 0 (collision orbit)
lim infs→∞ |z(s)| ≥ K → escape orbit
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 17 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
C-criterium
Proposition
Let q ∈ Int(D) with θ ≥ 0, and γ(s) = (θ(s), z(s),w(s)),s ∈ [0,∞), the solution of the global system through q. Then,
(i) if for some time s0 the value of the Jacobi functionC(γ(s0)) > C2 and z(s) is located in one of the boundedcomponents of the Hill’s region, then it is a collision orbit;
(ii) if for some time s0 the value of the Jacobi functionC(γ(s0)) > C3 and z(s) is located in the unboundedcomponent of the Hill’s region, then it is an escape orbit.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 18 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Connections in the the upper boundary problem
m1 m2∞
m1 ∞ m2
L+4
L+5
L+1 L+
3
L+2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 19 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Heteroclinic L+4 → L+
3
Invariant manifold Wu(L+4 ) (dim=2) and its intersections with
ΣC∗ = (z,w) | C(z,w) = C∗
0
0.5
1
1.5
2
-1.5 -1 -0.5 0 0.5 1 1.5
y
x
C=6.0
C=6.5C=6.8
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 20 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Heteroclinic L+4 → L+
3
Invariant manifold Wu(L+4 ) (dim=2) and its intersections with
ΣC∗ = (z,w) | C(z,w) = C∗
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
y
x
C=6.9
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
y
x
C=6.913
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 20 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Heteroclinic L+4 → L+
3
Invariant manifold Wu(L+4 ) (dim=2) and its intersections with
ΣC∗ = (z,w) | C(z,w) = C∗
-0.2
-0.1
0
0.1
1.1 1.15 1.2 1.25 1.3 1.35
y
x
-0.2
-0.1
0
0.1
1.1 1.15 1.2 1.25 1.3 1.35
y
x
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 20 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Outline
Introduction
Dynamics of the parabolic problem
Numerical results
Conclusions
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 21 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Explorations
Role of the invariant manifolds in the sets of connecting orbits betweenprimaries
Equal masses (µ = 0.5):Barrabes, Cors, Olle Dynamics of the parabolic restricted three-bodyproblem Communications in Nonlinear Science and Numerical Simulation,29: 400–415, 2015
Different masses (µ < 0.5):
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 22 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Connecting orbits with passages to collinear or triangularconfigurations
Connection of type mi − Lk −mj :
collision orbit with mi backwards in time
collision orbit with mj forwards in time
along its trajectory it has a close passage to Lk
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 23 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Connecting orbits: examples (µ = 0.5)
-0.5
-0.25
0
0.25
0.5
-0.25 0 0.25 0.5 0.75
y
x
-4
-2
0
2
4
-10 -6 -2 2 6 10
YX
m2
m0
m1
m2
m0
m1
m0
m2
m1
m2 − L2 −m2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 24 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Connecting orbits: examples (µ = 0.5)
-1
-0.5
0
0.5
-0.5 0 0.5 1
y
x
m2 − L3 − L2 −m2/m1
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 25 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Connecting orbits: examples (µ = 0.5)
-4
-2
0
2
4
-4 -2 0 2 4
m1
m0
m2
-3000
-1500
0
1500
3000
-3e+06 -1.5e+06 0 1.5e+06 3e+06
Y
X
m1
m2
m0
-30
-15
0
15
30
-200 -100 0 100 200
m1
m2
m0
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 25 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Symmetric connecting orbits (µ = 0.5)
Connection mi −mi: crosses the section θ = 0 such that y = x′ = 0
I.C. (x0, 0, 0, y′0)
Connection mi −mj : crosses the section θ = 0 such that x = y′ = 0
I.C. (0, y0, x′0, 0)
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 26 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Symmetric connecting orbits (µ = 0.5)
mi −mi
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’
x
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
-4
-3
-2
-1
0
1
2
3
4
-8 -6 -4 -2 0 2 4 6 8
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 27 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Symmetric connecting orbits (µ = 0.5)
mi −mj
-10
-8
-6
-4
-2
0
2
0 1 2 3 4 5
x’
y
capture m2capture m1C=C(L3)
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-4
-3
-2
-1
0
1
2
3
4
-8 -6 -4 -2 0 2 4 6 8
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 27 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Symmetric connecting orbits (µ = 0.5)
-3.33108
-3.33103
-3.33098
-3.33093
0.52952 0.5296 0.52968
x’
y
a
c-b
d-e
f
-2
-1
0
1
-2 -1 0 1 2
y
x
ab
cd e f
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 27 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Symmetric connecting orbits (µ = 0.5)
L−3 → L+
3
L−1 → L+
1
L−2 → L+
2
L−3 → L+
1
L−1 → L+
3
L−2 → L+
2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 28 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
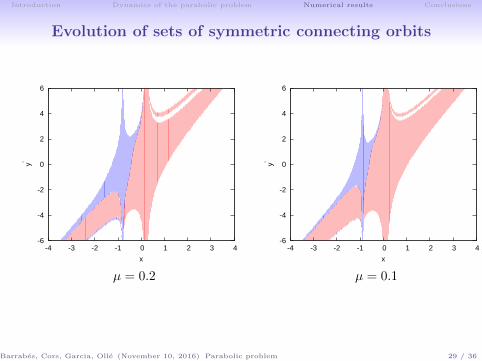
Evolution of sets of symmetric connecting orbits
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’
x
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’x
µ = 0.5 µ = 0.4
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 29 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Evolution of sets of symmetric connecting orbits
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’
x
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’x
µ = 0.3 µ = 0.2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 29 / 36
Introduction Dynamics of the parabolic problem Numerical results Conclusions
Evolution of sets of symmetric connecting orbits
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’
x
-6
-4
-2
0
2
4
6
-4 -3 -2 -1 0 1 2 3 4
y’x
µ = 0.2 µ = 0.1
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 29 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Bridges and Tails?
We consider a bunch of initial conditions around m1 for θ = −π/4 and a valueC ≥ C2 = 8 (for µ = 1/2). For this value of C, we fix a radius, r (distance tom1) and move α ∈ [0, 2π]. Since, velocity module is given by position andJacobi function C, we move β ∈ [0, 2π] (velocity direction).
0
1
2
3
4
5
6
0 1 2 3 4 5 6
β
α
0
1
2
3
4
5
6
0 1 2 3 4 5 6
β
α
r = 0.2 r = 0.001
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 30 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Tails
0
1
2
3
4
5
6
0 1 2 3 4 5 6
β
α
-4
0
4
8
12
-4 0 4 8
m1
m2
yx
r = 0.2 θ = 1.2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 31 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Bridges
0
1
2
3
4
5
6
0 1 2 3 4 5 6
β
α
-4
-2
0
2
4
-4 -2 0 2 4
m1
m2
yx
r = 0.2 θ = 1.2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 32 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
A Movie
-2
-1
0
1
2
-2 -1 0 1 2
y
x
m1
m2
-2
-1
0
1
2
-2 -1 0 1 2
yx
m1 m2
θ = −π/8 θ = 0
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 33 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
A Movie
-2
-1
0
1
2
-2 -1 0 1 2
y
x
m1
m2
-8
-6
-4
-2
0
2
4
6
8
-8 -6 -4 -2 0 2 4 6 8
yx
m1
m2
θ = π/8 θ = π/8
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 33 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
A Movie
-8
-4
0
4
8
-8 -4 0 4 8
y
x
m1
m2
-8
-4
0
4
8
-8 -4 0 4 8
yx
m1
m2
θ = 1.2 θ = 1.2
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 33 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Outline
Introduction
Dynamics of the parabolic problem
Numerical results
Conclusions
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 34 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Conclusions
Using the invariant manifolds, the symmetries of the problem and theC-criterium it is possible to construct connecting orbits of different types.
The regions of the phase space where the test particles remain or notaround each galaxy are confined by the invariant manifolds of thecollinear equilibrium points.
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 35 / 36

Introduction Dynamics of the parabolic problem Numerical results Conclusions
Further work
How does the mass parameter of the parabolic problem affects Bridgesand tails?
Explorations varying the inclination (Spatial parabolic problem)
Hyperbolic problem (make sense)
Barrabes, Cors, Garcia, Olle (November 10, 2016) Parabolic problem 36 / 36





























