-
7/30/2019 Gessow: Helicopter Research Problems
1/19
Precedingpage blank
By Alfred Gessow
L r ~ l g l e y Aeronaut ical Laboratory
T h i s paper i s r e s t r i c t e d t o a pre sen ta t ion o f
t he more impor tan tproblems as so ci at ed with th e development
of 'the m s t s u c c e s s f u l t y p e o fr o t a t i n g - w i
n g a i r c r a f t - t h e h e l i c o p t e r - and t o a n i n d
i c a t i o n o f t h ep r e s e n t status of res earc h of th ese
problems.
The he l i cop te r as t ho u gh t o f a t p r e s e n t i s an
a i r c r a f t i n w hichl i f t , p r op u ls i on , and c o n t
r o l a r e a l l p ro v id e d by one o r more p r o p e l l e r
-l i k e r o t o r s t u r n i n g ab o ut a n a pp ro xi m at el y
v e r t i c a l axis . The funda-me nta l advan tage of such a n
ar-ement i s t h a t t h e means f o r o b t a i n i n gand c o n t
r o l l i n g f l i g h t i s s e p a r a t e d fr om t h e t r a ~
n s l a t i o n a l p ee d s of t h ef u s e l a g e . In s p i t e
of t h e many advantages a ffo rded by t h i s f ea t -m e ,n ot ab
ly t h a t o f v e r t i c a l f l i g h t , i t w a s only dur ing
the l a s t decade thathe l i cop t e r s hav ing sa t i s f ac to
ry pe rformance and h a n d l i n g q u a l i t i e s h a v eb e e
n b u i l t and flown. T h e i r s u c c es s c a n b e a t t r i b
u t e d t o im provedsower pl an ts , an incr eas ed knowledge of g
en er al aerodynamics as w e l l a sthe aerodynamics of rota t
ing-w ing f l i g h t , and th e backlog of exp er iencega thered
from the hundreds o f unsuccess fu l he l i co p te r bu i lde r s
s ince th etime of D a Vinc i .
The present-day hel icopteri s s t i l l
i n an ea r l y s t ag e o f development.I t s per fo rmance ,
hand ling ch ar ac te r i s t i c s , s a fe t y, and r e l i a b i
l i t y, h o w -ever, though s t i l l poor when judged by modern
airplane standards, area l r e a d y a c c e p t a b l e f o r a
number of important applications where i t ss p e c i a l c a p a b
i l i t i e s are a t a premium. Prospec t s f o r fu r t he r
improvementare good and a w ide f i e l d of a p p l i c a t i o n
, b o th mi l i t a ry and commercial,i s assured .
DISCUSSION
The ge ne ra l h e l ic o p te r r e s e q h f i e l d i s , f o
r t h e p r e s e n t d i s c u ss i o n ,
d i vi d ed i n t o f o u r b ro ad c l a s s i f i c a t i o n
s : performance, vi br at io n andf l u t t e r , s t r e s s e s ,
and s t a b i l i t y and c o n t r o l . A d e s c r i p t i o n
of t h ep r o b l e m e nc o un te re d i n ea ch o f t h e s e f i
e l d s i s given, and l i n e s o ff u t u r e r e s e ar c h a r
e p o i n t ed o u t .
Performance
The problem of determining th e aerodynamic c ha ra ct e ri st
ic s of al i f t i n g ro t o r f o r purposes of des ign o r per
fo rmance es t im a t ion i s com-pl ic at ed by the la rg e number
of va r ia ble s involved. Consequent ly, t heapproach could no t
be wholly em piri cal, and some t h e o r e t i c a l frame workwas
r e q u i r e d t o c o r r e l a t e e x pe r im e n ta l d a t a
. The performance problem has
-
7/30/2019 Gessow: Helicopter Research Problems
2/19
been a t t ac ked the re f o re by t r y i ng t o deve lop a
method of ca l cu la t ing th ec h a r a c t e r i s t i c s of t h
e r o t o r f rom t h e c h a r a c t e r i s t i c s of t h e b la
de a i r f o i lse ct io ns . The method i s similar t o t h a t o
f c a l c u l a t i ng p r op e l l e r c ha ra c -t e r i s t i c
s by bl a de e le me nt o r s t r i p t h e or y b u t i s much
more complicatedbecause of t he f lap pin g motion of th e hinged
blad es and because the t r ans -la t ional (edgewise) component of
veloci ty i n forw ard f l i g h t , p a t a l s o beaccounted
for.
I n o r d e r t o m&e t h e pr ob le m c a pa b le of p r a
c t i c a l ~ o l u t i o n , c e r t a i nassunp t ions and s imp
l i f i ca t io ns had t o be incorpora ted i n t h e t h eo ry i
nadd i t ion t o the pr imary one of us ing two-d imensional a i r
f o i l cha r ac te r-i s t i c s i n summing up th e f o rce s a c
t i ng on the b l a d es o f t h e r o t o r. Ap r i n c i p a l a
s s u m p t i o n s p e c i f i e d t h a t t h e r o t o r i n d u
c e d v e l o c i t y c o u l d b eca lc ul at ed by t he momentum
the ory and could be conside red t o be uniforma c r o s s t h e r
o t o r d i s k . (S ee r e f e r e n c e 1. T h e r e s u l t i n
g c a l c u l a t i o n e ,
which were extremely lengthy and comglicated,were
s impl i f ied andcondensed in to des ign char t s tha t g ive a
good ineight as t o t h e e f f e c t sof changes i n r o t o r d e
si g n p a ra m e te r s. ( see re fe rence 2 - S u f f i c i e n
tcomparisons of the theory with exper imental data have been
obtained fromf l i g h t and f u l l - s c a l e t u nn e l t e s t
s t o prove t h e v a l i d i t y of theory.(See references 3 t o 9
f o r an e xp er im e nt al v e r i f i c a t i o n o f t h e t h e
o ryi n v ar i ou s f l i g h t c o nd i ti o ns . )
The accuracy of the theory i s i l l u s t r a t e d by f i p 1,
which showsthe good agreement between th e cal cu lat ed m d
rmsasured ch ar ac te r i s t ic s ,a s ob ta ined in f l i g h t ,
o f a t e s t r o t o r i n term s of a plot of powera g a i n s t
v e l o c i t y. It might be ment ioned th a t model t e s t s in g
e n e ra l a r eno t s a t i s fa c t o r y fo r he l i cop te r-pe
r fo rmance work because o f the e f fe c t s
of s ca le on th e aerodynamic ch ar ac te r i s t ic s of th e
blade e lements.
The t ransi t ion region between hover ing and about 30 m i l e
s p e r h o u rshown i n t h e f i g u r e r e p re s e n ts a
speed range i n which acc ura te d a t ac o ul d n o t be o b ta i
ne d i n f l i g h t b ec au se o f i n s t a b i l i t y and c o n
t r o ld i f f i c u l t i e s o r i n fu l l - sca le wind tunne l
s because of t h e l a r g e l yunknown in te r f e ren ce cor r ec
t i ons a t low a i r speed s . F u l l - s c a l e d a t awere
obtaine d i n t h i s region, however, by me- of a r e l a t i v e
l y newr e s e a r c h t o o l - t h e h e l i c o p t e r t e s t
t ow er . It w a s f o u n d t h a t t h e t e s t -tower r es u l
t s checked c lo se l y wi th th eo re t i ca l ca lcuLa t ions
over mostof t h e t r a a s i t i o n r e gi o n.
As a r e s u l t of t he exper ience gained through the use of
%he theoryand i t s e x p er i m en t al v e r i f i c a t i o n ,
s e v e r a l f a c t o r s were f oun d t o i n f l u e n c econs
ide rab ly the per fo rmance cha ra c t e r i s t i c s o f ro to r
s . One such fa c t o rwas th e importance of smooth, nondeformable
bl ad e sur fac es i n reduci ngthe power requi red by th e ro to r
i n a l l f l i g h t c on di ti on s. (See r e f e r -ences 9 and
10. ) The importance of wel l -bui l t b lades ar ises f rom thef a
c t t h a t i n c r u i s i n g and hi gh -s pe ed f l i g h t b l
ad e p r o f i l e drag accountsf o r from o n e- ha lf t o t w o
-t hi rd s of t h e t o t a l r o t o r l o s s e s .
Rotor theory and experiment have also shown t ha t rotor
performancei s dependent t o an qp re c ia b le ex ten t on the
amount of t w i s t and taper
-
7/30/2019 Gessow: Helicopter Research Problems
3/19
b u i l t i n t o t h e b l a de s of t h e r o t o r. S tud ies
( re fe rence ll) have indicated,f o r excunple, th a t the r o t o
r induced losses , which a r e the pena l ty th a tmt
b e p a i d f o r t h e t h r u s t produced by the r ot or ,
comprise approximately75 p e r c en t o f t h e t o t a l power l o
s s e s i n t h e h o ve r in g c o n d i ti o n and t h a tthese
los ses can be reduced t o th e ex te n t o f inc reas ing t he
hovering payload by approximately 20 percen t i f the b lades were
des igned wi th amoderate amount of taper and twist, instead of
being untapered anduntwisted .
Theory and experiment have als o pointe d out th e values of
designv a r i a b l e s t h a t would r e s u l t i n maximum
performance. An example of t h i si s i l l u s t r a t e d i n f i
g u r e 2, which shows t h e i q o r t a n c e of low r o t o rsp
ee ds and h i gh b la d e l i f t c o e f f i c i e n t s f o r h
ov er in g and v e r t i c a l - f l i g h tperformance. The to p
curve shows t h a t a reduc t ion o f t i p speed from600 f e e t
pe r second t o 400 f e e t pe r second would reduce the power
r e q u i r e d t o h o ve r a t f ixed th rus t by approx imate
ly 25 percen t . The lowercurve shows t h a t a t a f ix ed power
and t h r u s t , t h e same re d u c t i o n i n t i papeed resu l
t s in a s u b s t a n t i a l i n c re a s e i n t h e v e r t i c
a l r a t e o f c lim b,namely from 200 f e e t pe r minute t o
approximately 1150 f e e t pe r minute.The ques t ion migh t na tu
ra l ly a r i s e as t o what c o n s t i t u t e s a l ow er l i m
i tt o t h e t i p s peed and why the he l i co p te r cou ldn ' t
a lways opera te a t th a tl i m it i n g c on di ti on . The m w e
r l i e s i n the f a c t t h a t l ow t i p s pe ed s a r every
undesirable a t high speeds and that a good hel icopter design
muste i th e r compromise between t he two cond itions o r must d e
l i b e r a t e l y f a v o rone a t the expense of the other. (See
reference 12. )
The choice of th e proper t i p speed and othe r design
parameters foxe f f i c i e n t hig h- sp ee d f l i g h t must b e
i n v e s t i g a t e d as p a r t o f t h e g e ne r a lproblem of
rotor -blad e s ta l l in g . This problem has received and i sg e
t t i n g a gre a t de a l o f a t t en t ion , fnasmuch as i t
considerably reducest h e e f f i c i e n c y o f a h e l i c o p t
e r f l y i n g a t h i g h s pe ed s and i s t h e d e c i s i v
ef a c t o r in l fm i t ing the top speed of p resent -day he l i
co p te r s .
B la de s t a l l i n g r e s u l t s from t h e f a c t tha t a
s t h e l i f t i n g r o to rmoves forward, the advancing bla des
encounter progr ess ive ly high erve l oc i t i e s , whereas the
re t r ea t i ng b lades encounte r p rogress ive ly lowerv e l o c
i t i e s . Thus, i n o rder to main ta in approximately equa l l i
f t on bo ths i d e s o f t h e r o t o r s o a s t o pr e ve n t t
h e h e l i c o p t e r fr om r o l l i n g o ve r,t h e l ow - ve
lo c it y r e t r e a t i n g b l a de m st opera te a t higher
angles ofa t t ack than the h igh-ve loc i ty advanc ing b lade . I
t fol lows t h a t a s t h eh e l i c o p t e r i n c r e a s e s i
t s forward &peed, th e angles of a t t a ck of ther e t r e a
t i n g b l a de w i l l i n cr e a se p r o p o r t io n a l l y u
n t i l a t some value offorward speed the ang les o f a t t ac k
of the re t r ea t i ng b lade w i l l reacht h e s t a l l . As s
t i l l higher speeds are reached, t h e s t a l l i n g
becomesprogressively more severe and spreads t o a l a r g e r p a
r t o f t h e r o t o r d i s ku n t i l t he s e ve r e v i b r a
t i o n s and the l os s o f c on t ro l b rought about by t h es t
a l l pr ev en ts t h e h e l i c o p t e r from f l y i n g f a s
t e r .
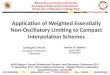
The effect of forward speed a.nd r o t o r t i p s peed on s t a
l l i n g i si l l u s t r a t e d i n f i gu r e 3. The c i r c l
e s repr esen t p lan v iews of the ro to rd i s k , t h e d i r e
c t i o n of f l i g h t and d i r e c t i o n of r o t a t i o n b
e in g a s R ~ O W T ~ .
-
7/30/2019 Gessow: Helicopter Research Problems
4/19
The dark region a t the cen ter repres ents the swept ar ea of
the hub andblade s and the shaded crescents represent the regione
where thed i r ec t ion o f f low ove r the r e t r e a t fng b l
ades i s reversed. F or t h i s h e l i -copter, a t 40 miles pe r
hour and r o t o r rpm, s t a l l i s beginning tooccur nea r t he
t i p o f t he r e t r e a t in g b l ade; When th e q e e d i s
increasedt o 70 miles per hour, s t i l l keeping the same rotor
rpm, t h e s t a l l e d a r e ahas Increase d consid erably= The
redu ctio n in s t a l le d area brought aboutby incre the ro to r
speed to 225 rpsn i s shown on the bot tom c i rc le .A t the s
onmrd speed, the high er rot at io na l speed reduces thed i ff e r
en t i a l i n speed between the advancing and r e t r e a t in g b
l ades and socuts down the stal led area.
A c r i t e r i o n has been developed f o r pred ic t in g the
Um it ing q e e ddue to s ta l lFng. (See reference 13. It lm.e
been found that theopera t ional l imi t can be cons idered as
reached when t he ca l cu la t ed ang leof a t tack a t t he t i p
o f t he r e t r e a t in g b l ade exceeded the s t a l l i n g
ang leof" th e blade a i r f o i l by approximately 4. O n e u se
of t h i s c r i t e r i o n i si l l u ~ t r a t e d n f i g u r e
4 which shows the variation of t h e m-lnlrmnn allowablem t o r
speed, as s e t by b lade stall-, with f0maa-d speed. The m L d m
mm$or weed was calc ulat ed f o r each value of folVElrd speed by s
et t i n g a16 t i p of a t t a c k a t t he r e t r ea t ing b3ade
as t h e o p e r at i o na l l l m i t .Thus, f o r a given fo&
wee d, a hel ic opte r cannot be opera ted i n thehatched por t ion
of th e p lo t but rrmsf, i ac reaee i t s r o to r t i p q e e d u
n t i lt h e t i p a ng le of a t t a c k Is 1@ o r less ( t h a t
is , it must be operate d t othe r ight of the curve . )
Although a helicopter can be f luwn unti l the 4 t i p - a n g l
e l i m i t i sexceeded, th e pro fi le-d rag lo ss due t o s t a l
l - beg ins as t i p s t a l l in g
a e t s in .It
ha8 been found tha t the prof i le d r a g approximately
doublesby the t ime the l im i t in g top speed i s reached. (See
ref ere nc e 14 . )The ef fe c t s of s t a l l i n g on r o t o r
p r o f i l e d r a g can be seen in f i g u r e 5,in which the
profile-drag power absorbed by two sets of blades arep lo t t ed
aga ins t weed . The dashed l i n es i n the f igu re r epresen t t
hecalc ulat ed power with no allowance fo r blade s ta l l in g,
whereae the so li dl i n e s i nc lu d e l o s se s due t o s t a l
l i n g and thw r ep resen t t he ac tua lp ~ o f l e power
absorbed. Note th a t s t a l l in g los ses are Lar@;e
incomparison t o th e profi l e-dr ag pa rer absorbed by th e un
sta l le d bladesand tha t , therefore , the top speed of the he l
ic opte r i s also reducedbecause of th e addit ion al s t a l l
power.
Once th e e ff e c ts of blade st al lF ng were understood,
means f o r
a l l ev ia t i ng o r de lay ing these e f f ec t s were inves
t iga t ed . A s a t i s f a c t o r yw ay t o d e la y t h e s t a
l l was t o t w i s t t h e r o t o r b la d es s o t h a t t h e t
i psec t ions wo rhd a t lower angles of a t ta ck than they would
i f the b ladeswere untwisted. (The effects of blade twist were
investigated i n f l i g h tend the r e su l t s a r e r epor ted i
n r e fe rence 17.) The effectiveness ofblade twis t i n reducing
the de t r imenta l e ff ec ts of s ta l l in g can be seeni n f i
g u r e 5 . The fig ur e show t h a t an incre ase of about 10
percent inth e l im i t ing speed of the t e s t he l ico pter
appears poss ib le wi th the useof -8O of blade t w i s t .
Alternat ive ly, twist re du ce s t h e s t a l l i n g p r o f i l
e -drag losses by approximately 40 percen t of the pr ofi le- dra g
power absorbed
-
7/30/2019 Gessow: Helicopter Research Problems
5/19
by the r o t o m in th e uns t a l l e d con di t ion once s t a
l l in g had deve loped onboth ro to rs . The use o f b lade twist
i s desirable inasmuch as , a t t h e
very least,it
appears t o have no de t r im enta l e ff ec t on ro to r pe
rfomnancefn, a.uy o t h e r f l i g h t c o n d i t i o n .
Another and s a n e w h a t o b v i o : ~ means f o r m in im iz
in g t h e e f f e c t s o fb l a d e s t a l l i n g I s by
increasing t h e b la d e -s e c ti o n s t a l l i n g a n g le o
fa t t a c k . The b e n e f i t s t o b e h ad by s o d o in g, in
terms of an inc rease i npermissable load a t a f i x e d t i p sp
eed, i s shown in t h e l e f t p a r t off i g u r e 6. It can be
seen From the f i gu re t ha t th e permissab le h e l i c op te
rlo ad c ould be i n c r e y d by a f a c t o r of 3 i f t h e s e
c t i o n s t a l l e couldbe increased from 12 t o 20'. The suc
ces sfu l ap pl i ca t io n of var io us high-l i f t dev ices t h
a t w o u l d s u b s t a n t i a l l y i n c r e a s e t h e s e c
t i o n s t a l l anglew i th o u t p r o h i b i t i v e drag i n
c r e a s e s 16 th e high -velo ci ty low-angle-of-a t t a c k r e
g i on s o f t h e d i s k w f l l pr ov e a f e r t i l e f i e l
d f o r f u t ur e h e l i -
c o p t e r r e s e a r c h .
J u s t asr b l a d e s t a l l i n g p r e s e n t s a lo we r
l i m i t t o t h e a l l ow a b ler o t o r t i p s peed, a n o th
e r l i m i t e x i s t s t h a t p re v e n ts o p e r a ti o n a
t extremelyhigh t i p s pe ed s. That l i m i t i s c o q r e s s i
b i l i t y e f f e c t s on t h e hi gh -v e l oc i ty t i p s e c
t i on s of the advancing blade . F o r a given s ta l l ing angle
,a higher sec t ion c r i t i c a l Mach number w i l l permi t
opera t ion a t l a r g e rgross weights because it p er mi ts t h
e w e o f U g h e r t i p 8 pe ed sa It can beseen f rom the r igh
t p a r t of f igure 6 t h a t l a rg e i n c r e a s e s in pay
load canb e r e a l i z e d by i n c r e a s h g t h e c r i t i c
a l Mach number o f a i r f o i l s e c t i o n sused in t h e b l
a d e s .
Although most r o t o r b l a d es a t the present time are
composed ofconvent ional w i n g s e c t i o n s , a t t e n t i o
n i s befng gfven t o th e developmentof a i r f o i l s e c t fo n
s de si gn ed e s p e c i a l l y f o r r o t o r s as dist-ishedf
w m wings o r p r o p e l le r s . In a d d i t i o n t o a h ig h
s t a l l angle and a highc r i t i c a l Mach nmiber, th e de s i
ra b le ae rodynamic c ha ra c t e r i s t i c s of a . i r-f o i l
s e c ti on s s u i ta b le f o r us e as r o t o r - b l a d e s e
c t i o n s are: ( 1 ) n e a r l yzero pitching moment, (2 ) low
drag throughout the range of lowmoderate l i f t s , an d (3 )
moderate drag a t h ig h l i f t s .
Most of the NACA l o w - d r a g a i r f o i l s tha t have been
developed havetoo high a pitching-moment co ef f ic ien t t o
warran t con s idera t ion f o r usew i t h c u r r e n t h e l i c
o p t e r d e s i g n s . (High pitching-moment c o ef fi ci e n
tsl e a d t o u n d e s i ra b l e p e r i o d i c s t i c k f o r
c e s and t o v ib r a t io ns b rought aboutby per iodic blade
twis t . ) Althorn t h i s o b j e c t i o n i s removed with
thelow-drag symmetrical sections t h e s e s e c t i o n s a r e n
o t a p p l i c a b l e b e ca us e
4,ha lf of th e low-drag 'bucket, o r, i n o t h e r w ords, h a
l f o f t h e l i m i t e drange of l i f t c o e f f i c i e n t s
in which the important drag r e d u c t i o n s a r eachieved, i s
below zero l i f t ; whereas th e f a s t e r moving por t io ns o
f th eh e l i c o p t e r b l a d e are nearly always operat ing a
t p o s i t i v e l i f t coefficient^.
In ord er t o pla ce th e low-drag "bucket" in a us ef ul ra.nge
of l i f tc o e f f i c i e n t s a n d s t i l l r e t a i n zero
o r a lmost zero moment co ef f ic ien t , anumber of sp ec ia l a
i r f o i l s have been der ived. (See refere nce 16. ) Oneof
these, th e NACA 8-H-12, shows the most promise. A comparison of
the
-
7/30/2019 Gessow: Helicopter Research Problems
6/19
NACA 8-H-12 sec t io n with the conven tional RACA 23012 a i r f
o i l i s given inf i g u r e 7, which shows a r educ t ion in d r
ag o ve r most o f t h e l i f t c o e f f i -cient range conibined
with an e a r l i e r
s t a l l .Calcu l a ti ons o f t he pe r fo r-mance of ro to rs
inco rpor at ing the new sec t io n have ind ica ted th e
supe r io r i t y of t h e sp ec i a l s ec t i o n ove r t he
conven tiona l s ec t i ons . Full-sca l e t e s t s of p r ac t i
ca l - cons t ruc t i on b l ades i nco rpo ra ti ng t he NACA
8-H-12se c t io n a re needed , however, t o de termine the t ru e
worth of t he a i r f o i lw d e r a c t u a l o p e r a t in g c o
n di ti on s .
Vibra t ion and F l u t t e r
It i s commonly accepted t h a t where Large, ro $a tin g masses
a r einvolved, v ib ra t i ons o f some k ind a r e l i ke ly t o
appear - and the h e l i -cop t e r i s no exception. In f a c t ,
t he de s igne r s of most of t h e e a r l i e r
tries of he l ico pte rs had as m h i f f i c u l t y in r educ
ing t he v ib ra t i ont o a c ce p ta b le l e v e l s as they had
i n obta ining adequate performance. Agood de al of th e tro ubl e
w a s caused by poorly b u il t , unbalanced bladesand w a s l a rg
e ly e l imina ted wi th more ac cura te des igns and an
increasedhowledg e of blade balancin g and trac ki ng procedure. A
second sourceof t h e v i b r a t i o n d i f f i c u l t i e s e n
co un te re d were i n h er e n t i n t h e h e l i c o p t e ri t
s e l f and cou ld o nly be av oided when th e phenomenon th a t c
aused it wasthoroughly analyzed and understood. A n example of such
a phenomenon i sa s e l f - exc i t ed mechan ica l v ib r a t i on
known as "ground resonance, " whichhas been r e spons ib l e f o r
t he de s t ruc t i o n o f s eve ra l au tog iro s cwdh e l i c o
p t e r s .
Es se nt ia l ly , "ground resonance " i s a s e lf -exci ted
mechanicalv i b r a t i o n t h a t i nv ol ve s a coupling between
t he motion of t he r o to r bladesa b o u t t h e i r drag hinges
and th e motion of the h e l ic op ter as a whole oni t s lan din g
gea r. When th e fre qu en cie s of th e two motions approach
eachother, a v io le n t shaking of the a i r c r a f t occurs
which, i f undamped, wouldr e s u l t in i t s complete de st ru ct
io n. Th is phenomenon w a s t h e o r e t i c a l l yinves t i ga
t ed and a theory was developed which su gge sted means f o
ravoiding "ground resonan ce." (see ref er enc es 17 t o 19.) Ln o
r d e r t omaZre t h e th eo ry ea sy t o use, it was put i n th e
form of s imple cha rtswhich predicted the range of rotor speeds i
n which t he i n s t ab i l i t yoccurred and th e amount of
dasrping nec essa ry t o avo id dangerous f r e -quencies.
Another example of a v ibr a t io n problem pecul ia r t o he l
ico pte rs w a sencountered i n th e operat io n of two-bladed ro
to rs . The phenomenon wasca l l ed b l ade 'heaving " from the
appearance of the wavy path traced byt h e b l ad e t i p s and w a
s found t o be an aerodynamic i n s t a b i l i t y o r ty peo f f
l u t t e r . The problem w a s i nves t i ga t ed t he o re t i ca
l l y ( r e f e r ence 20)~ m d ls o by means of model te s t s .
The genera l re su l t o f th e s tudy wast h a t a s ee -saw r o t
o r w i th a coning angle i s more uns tab le than an a i r-plane
wing having corresponding parameters. The add i t i o na l uns t ab
i l i z inge f f e c t i s as soc i a t ed w ith t he d i f f e r
ence i n moments o f i n e r t i a i n f l app ingand i31 r o t a t
i o n . In f a c t , i t w a s found tha t wi th cer ta in combina
t ions ofconing angles and b lade des ign par me te rs , f l u t t
e r could occur even when
-
7/30/2019 Gessow: Helicopter Research Problems
7/19
th e chordwise cen te r of mass of th e blades w a s we ll ahead
of t he 23-p er ce nk - ch or d p o i n t P ro po se d r e m d i e
s f o r t h e f l u t t e r i n v e s t i g a t e dincluded
decreasing the coning angle of th e b lades , des ign ing the b
ladess o tha t t h e i r mass ten ds t o be confined t o t h e p h
e o f r ot a t io n ,h c r e a s i n g t h e c on tr ol -s ys te m
s t i f f n e s s and fo rward pos i t ion o f the cen te rof mass,
and adding mechanical damping t o t he ro t o r system.
The he l i cop te r is s u b je c te d t o a t h i r d t y p e o
f v i b r a t i o n t h a t c a x m o tbe e l im in ate d i n m c h
as i t i s a f o r c e d v i b r a t i o n i n h e r e n t in t h e
a e r o -m c s f t h e r o t o r i t s e l f . T h is t yp e of v i
b r a t i o n i s encountered, f o re q l e , w it h two-bladed h e
l ic o pt er s i n t h e t r a n s i t i o n r e g i o n be tw
eenhovering arnd fo rward f l i g h t where in cyc l i c va r i a t
io ns o f induced andp r o f i l e drag g iv e r i s e t o h o ri z
o nt a l hub v i b r at i on s o r, f o r e x q l e , whenb l a d e
s t a l l i n g i s encountered in high-speed f l i g h t . (See re
fe rence 21. )Although inheren t v ib ra t ion s o f th ese typ es
casno t be e l imina ted , theycaa be i s o l a t ed by s u i t a b
l y shock mount ing the ro to r system, and bywb.g i r r e v e r s
i b l e c o n t r o l s t h a t c an no t trm sm 3-t v i b r a t o
r y f o r c e s t o t h ep i l o t 's c o n t r o l s . A gr ea t
de a l o f work remains t o be acconrplished i nr ed u ci n g t h e
o v e r -a l ll v i b r a t i o n l e v e l o f t h e h e l i c o p
t e r s o t h a t it ca nbe f lown f o r long pe r iods o f t b i t
ho u t u n n e c e s s a ri l y a dd in g t o p i l o tf a t i g u
e .
S t r e s s e s
Although the achievement of maximum he li c op te r performance
a.ndr e l i a b i l i t y c a l l s f o r a thorough knowledge of
the stresses imposed ont h e r o t o r a nd fu s e la g e of t h e
h e l i c o p t e r i n a l l s teady and acce le ra ted
f l i g h t c o n d i t io m , t h e g e n e r a l f i e l d of
h e l i c o p t e r s t ress a n a l y s i s h asbeen c om i de r
ed secondary t o t h ~ erodynamic problems. L i t e r a t u r e o
nh e l f c o p t e r st ress analysis does ex i s t , bu t , in t h
e main, c o m e n t i o n a lznethods have been applied in analyziw
t h e f u s e l a g e a nd r o t o r b la d e s .Blade analys es, f
o r example, have been made by pr op el le r s t r i p methodsal
though an add i t iona l compl ica t ion tha t has been t aken in
to accoun ti s th e spanwise bending of th e blades , which tends t
o change the d ir ec t i onof t h e c e n t r i f u g a l l o ad i
n g o n t h e b l a d e s . (See references 22 to 26 Tori n f o m a
t i o n on b l ad e s t r e s s a n a l y s i s . ) A s ye t ,
however, ac tu a l s t r e ssvalues , and the var i ous ass
lxtqptions regarding blade loa ding th a t ar eFncorpora ted i n
these methods, have no t been d i re c t ly ve r i f i ed by r e l
i a b l efu l l -s ca le t e s t measurements. Aside f rom a d i r
e c t c h e c k o n t h e a c t u a ls t r e s s e s , t h e s i g
n i f i c a n c e o f t h e s e c a l c u l a t i o n s would b e g
r e a t l y
s t rengthened i f exper imental da ta were obtained on the
induced f low i nf o m d f l i g h t , s o t h a t t h e aero-c l o
a d i n g c a n b e more a c c u r a t e l yc a l c u l a t e d .
(Tlae induced flow h h o v e r i n g h a s b e e n d i r e c t l y
v e r i f i e dby B r i t i s h f l i g h t t e s t s . )
I n conn ecti on w it h induced-flaw measurements, i t might be
mentionedt h a t t h e o v e r - a l l m ag ni tu de and g e n e r
a l d i s t r i b u t i o n of t h e i nd uc edveloci ty have been
ver i f ied by rotor-blade-motion and performance t e s t smade i n
f l i g h t . The in du ce d v e l o c i t y a c t u a l l y a p p
ea r s t o v a ry n o n l i n e a r l yi n magni tude acr oss t he
di sk, however, and would the re fo re be e q e c t e d t o
-
7/30/2019 Gessow: Helicopter Research Problems
8/19
inf luence cons iderably local s t ress va lues a long the b
lade . The problemof dete induced veloci t ies i s amenab le to
theo re t i ca l so lu t ion jand although same work ha^ been done
along these l ines ( r e f e r a c e 27), agood deal &ill
remains t o be done before ro tor-blade st re ss es can bepredicted
with confidence
S t a b i l i t y and Control
The in fom at ion th a t h a s been ax;cunnilated on the
stability asdcontrol of helicopters during the past years has been
rather L-lmited.In t h e i r d e s i r e t o e s t a b l i s h th e
p r a c t i c a b i l i t y of tb h e l l c o p t e r as af Q b g
machine, des igne rs have con cen trate d on in~roving he
performancean d mducing the v ibra t ions of the he l icopter,
while accepting mmginals t a b i l i t y and c o n t r o l c h a r
a c t e r i s t i c s . AEJ a r e s u l t , t h e h e l i c o p t e
r in
i t s present stage of development i s d i f f e r e n taJld
more d i f f i c u l t t o f l ythan m s t f ixed -wiq a i rp l
anes . Ln response t o t he inc rea sin g demandsplaced upon the he
lic op ter by the armed ser vice s and by commercialoyerato m,
however, th e improvement of the s t a b i l i t y asd c o n t r o
lc h m a c t e r i s t i c s o f t h e h e l i c o p t e r and of i
t s f l y i n g and - l ingq u a l i t i e s i s perhaps th e most
important he lic op te r resea rch problem a tthe present t i m e
.
A nuni$er of th eo re ti ca l papers have been wri t te n on the
sub ject ofh e l i c o p t e r s t a b i l i t y and con trol .
(See reference s 28 t o 32.) Althought h e t h eo r ie s pre se nte
d i n t h e ~ e apers are somewhat di ff er en t and so w -times
contradictorg, it i s gene ra l ly agreed th a t (1 ) i f t he he l
i cop te ri s dis turbed while hover ing, asd i f th e cont r o l s
t ic k remaizlEI f ixed,
t h e h e l i c o p t e r w i l l describe an osc i l l a t ion
abou t i t s or ig inal hover ingpos i t i on , eLnd (2) the ampli
tude of the os c iU at io n w i l l increase withtime. According t
o def in i t io n , the he l ic opte r i s thus dynamicallyunstable
i n hovering . Cal cula t ion s indi ca te th a t the per iod of
theo sc il la ti o n of a two-place, 2700-pound he lic op te r i s
of th e orde r of10 secon&s and that the rate of divergence i s
s m a l l . Limited f l ightdata , obtahed in t h i s country
(refere nce 33) and in England, haveroughly checked the calculat
ione asd have ind ica t ed tha t t he Fns t ab i l i t yof the
hover- os ci l l at io n i s no t a p rob lem t o the p i l o t
.
The helicopter does have some handling characteristics in
hoveringt h a t me f requen t ly objec tionable , esp ecia l ly t o
the novice p i lo t . Oneof the handling problems th a t the t ra
ine e m a t overcome wi th the smal lers i zed he l i cop te r a r
i s e s f rom the h igh con t ro l s ens i t i v i ty o f t he he l
i -copter i n m l l or, i n o ther words, the h igh ra te of r o l
l pe r inch ofst ick displacement. Th is s e ns i t i v i ty f r
equen t ly l eads t o ove r-con tro l li ng ,which may r e s u l t
in a s h o rt -p e ri od p i lo t -i n du c ed l a t e r a l o s c
i l l a t i o n .Con trol se n s it iv it y becomes le sa of a
problem with l ar ge machines becausef o r a g iven s t i ck d
isplacement th e ro l l in g veloc i ty obta ined w i l l
varyinverse ly as the diameter. Prequently, undesirable st ic k-f
or ce grad ientsa r e a d d i t i o n a l f a c t o r s t h a t add
t o the co nt ro l problem of th e unexperi -enced heUcopter p i lo
t .
-
7/30/2019 Gessow: Helicopter Research Problems
9/19
Another cont ro l d i ff icu l ty that might be mentioned has
been encoun-te red in th e partial-power vert ical- des cen t
region between approxi-
mately 500and PfSOO
fee& pe r minute.In
this vert ical-descent raage,the s ib ra ti o n of th e he lic
op ter Becomes q ui te pronounced. Rather violent ,random yawing
motions the n occur with some r o l l ; th e r a t e ofdescent
apparent ly increases rap id ly j the ro tor ro ta t iona l speed
var iesn o ti ce ab ly j q d more often than not the hel icopter
eventual ly pi tchesnose down a.nd recovers by gaining speed, desp
ite ap pli cat ion of conaid-erable rearward control. There i s
rrmch t o be le arn ed abou t t h i8 regimeof ope ration, bu t
prel9mlnaz-y in di ca tio ns are that the fundamentd causeof the
phenomenon i s an unsteady, mixed flow of a i r through th e ro t
or*ZmeguLar f law i n th i s in termediate f l i g h t condi t ion
might log ic beerpected i m c h as air i s blown downward through
the r o t o r i nhovering, whereas in completely power-off descen t
an, upward flow of a i r
place. Although p i l o ts have exgerienced no di ff ic ul ty i
n vering
the maneuver a t any st ag e de sir ed , th e phenomenon could
be erousi f it occurred a t very l a w a l t i t u d e s .
The helicopter has c e r t a i n u n d es ir ab le s t a b i l i
t y and co nt ro l eh;arac-t e r i s t i c s i n forward f l ight
as wel l as i n hovering a.nd in v e r t i c a ldescents. The major
complaint reported by pilots i s t h a t they f ind itqui te d i ff
ic u l t t o hold s teady condi tions in forward f l ight bemuse
ofa stro ng tendency of th e machine t o diverge in p i t ch .
Inves t i ga t i on hasshown tha t t h i s tendency r e s ~ + l t s
rom the f ac t t ha t t he he l i cop t e r 191general i s m at ab
le with angle of at tac k. There ase two logicalsou rces fo r t h i
s I n s t a b i l i t y . The f i r s t sou rce i s t h e usual
unstablefuselage, and the second results f r o m the flapp ing of
the roto r. Whena f lapping ro tor LEI subjec ted t o an angle-o
f-attack chmge i n forwardfl ig h t, th e respaat- change i n blade
f lapping w i l l , be such as t o herfncrease the ro tor angle
change.
Theoret ical izalculat ions indicate t ha t t h e i n s t a b i
l i t y of t b o t o rand fuselage with angle of att ack , i f not
overcome by a ~ t a b i l i z i n gm e a m such as a t a i l su r f
ace , r e su l t s in an unstable dynamic oscillation.F l i gh t t
e s t r e s u l t s of s t i ck - f i xed o sc i l l a t i ons , r
epo r ted in r e f e r e m e 34,qu ali t at i ve ly checked the
calcu lat io ns. An example of an o s c i l l a t f o nobta ined a
t 40 miles per hour i s shown i n f ig ur e 8. The osc i l la t ion
w a si n i t i a t e d by a momentary a f t motion of th e s ti c k
. The peri od of themotion i s about 1 4 seconds, which i s long
enough so that the pi lot doesnot have trou ble con tro llin g the
osc il la ti on . The motion doubles Inamplitude i n about 1 cycle.
Resu lts obtained a t higher speeds, however,have indicated that
the motion following a disturbance i s a divergence,ra-bher tha n
an osc i l l a t i on . Ae you can w el l imagine, a di verg ent
raotiont h a t could be brought about by a sudden gu st i s a
dangerous maneuver i fc o ~ c t i v e c t i on i s not immediately
inftiated.
An exanple of such a maneuver obta ined a t 65 miles per hour
frs shownin f igure 9 . Again the h el ic op te r was distu rbed by
an i n t e n t i o n a l s t i c kmotion, a f t e r which the s t i
c k was h el d f i x ed a t t h e trim pos i t i on . Thehelicopter
nosed up mildly and then nosed down. It was s t i l l nosing downa
t an increasing rate, as the accele rat io n curve indicates, about
4 econds
-
7/30/2019 Gessow: Helicopter Research Problems
10/19
a f t e r t he 1 g axis w a ~ rossed, and recov ery had t o be
made by c o n tr o la p p l i c a t i o n . In fa ct , considerable
d if f i c u l t y was encountered i nrecovering from the maneuver
because the ac cel era t io n cont inued t o bu i ldup 2 s eco nd s
a f t e r t h e c y c l i c c o n t r o l s t i c k was a t i t s
forward stop. Thep i l o t had t o r ed uc e t h e t o t a l p i t
c h and had t o r o l l the machine as i n a
-oTer before s teady f l ight could be reached.
Ln general , it was found tha t though the he l icop te r i s
unstable overthe ent i re speed range, i t s i n s t a b i l i t y
i s l e a s t in t h e 40 t o 63 milesper hour region. A t h i gh e
r q e e d s , t h e p i l o t h a s p r og r es s iv e ly l e s
stim e t o i n i t i a t e r ec ov er y f rom a d i ~ t u r b a n c
e sd t h e w h i m becomesr a p i d l y m re uns tab le .
It should be unde 'mtood tha t the undes i rab le s tab i l i ty
and c o n t r o lc h a r a c t e r i s t i c s j u s t d i sc u s
se d do n o t p r o h i b i t t h e p re se n t- da y h e l i c o p
t e rfrom be ing a usefu l to o l f o r spec ia l ized purposes.
Qar ioue meass f o re li m in a ti n g t h e se c h a r a c t e r i
s t i c s are under coneiderat ion in o r d e r t ou t i l i z e
all the po te n t ia l i t i ' e s o f the he l icop te r, bu t the
cho ice andap pli ca t io n of thes e s olu t io ns depend upon
cont inued rese arch anddevelopment.
Future Research Deeds
AD a t t e q t has been made here in t o acquaint t he read er
with thepresen t s ta tw of he l icop te r research . It may the re
fore be appropr ia tet o conclude with a sta%ement on fu tu re rese
am h needs.
R eq uire men ts f o r s a t i s f a c t o r y f l y i n g q u a
l i t i e s of h e l i c o p t e r s s ho ul dbe es tab l i shed ,
similar t o t h os e a l r e a d y s e t up f o r t h e a ir p l a
n e , asdm an s f o r meet ing thes e requirements should be inv
est ig ated . In p a r t i c u -Par, methods should be found to
give the he l ic op ter s t ic k- f ix ed and s t i ck -f r e e s t
a b i l i t y i n ho verin g and i n f orw ard f l i g h t . Wi th
th i s in mind,automatic-f l ight devices should be i n v e s t i g
a t e d j and t h e e f f e c t i v e n e s sand appl ica t ion of
aerodymmlc servocontrols and other conltrol mrmgements,including
power controls, should be s tudied. Also. , theoret ical
andexperimental s tudies are needed t o e q l a l n and c o r re c
t t h & c o n t ro l d i f f i -cu l t i es encounte red by p i
lo t s in the t r an s i t i on reg ion be tween hover ingmd c r u
i s i n g f l i g h t a;nd when descending vertically a t
pmtial-powercondi t ions .
The t r en d toward la rge-d iameter load-car ry ing he l ic op
te rs c a l l s f o ra mom extensive knowledge of rotor-blade
aerodynamic loading and blades t r e s s e s . Induced veloci-ty an
d s t r e s s measurements should, the refo re,be made and
thoroughly analyzed. The w e of more than one l i f t i n g ro to
ron t h e l a rg e l o a d -c a rr y in g h e l i c o p t e r s c a
l l s f o r a thorough invest igat iono f t h e aerodynam ic c h a
r a c t e r i s t i c s of' t h e v ar io u s d t i r o t o r ar ra
ng em en tst h a t a r e being proposed. In pa rt ic ul ar ,
induced flow stu die s should bemade fo r the various co nfigurat
io ns th a t are now bein g used. Such st u d ie swould be u s e f
u l f o r s t a b i l i t y work and, al so , f o r performance
inasmuch asinduced power requirem ents appea r t o be th e primary
unknown in computingthe performance c ha rac te r i s t i cs o f
mul t i ro tor conf igura t ion%.
-
7/30/2019 Gessow: Helicopter Research Problems
11/19
The app l ica t i on of j e t p ropuls ion t o he l icop te rs
has long beenconsidered as a d e s i r a b l e me- f o r i n cr ea
si ng th e s b n ~ l i c i t y nd t h eload
carcying a b i l i t y of t h e h e li c o p te r. S e v e r a l
h e l i c o p t e r s u tl i z
n gt h e j e t p r h c i p l e h ave a lr e ad y been b u i l t
and flown. A g r e a t d e a l ofresearch, however, i s s t i l l
needed t o e st ab lf sh th e aerodynamic req uir e-
4 ments of je t -d r ive n he l ic op ter s and t o produce an e
f f i c ie n t j e t s y s t m .The use of j e t s al so br ing s
a3out additian &l problems Involving bladedesign, vibrat ion,
asd s t a b i l i t y c h a r a c t e r b t i c s t h a t should
beas t ic ipa ted and so lved
It i s hoped that an early and s u c c e s s f u l s o l u t i o
n of t h e s e p r o b l e mwill make the helicopter a t r u l y
dependable asd i n d i s p e n s a b l e a i r c r a f t .
-
7/30/2019 Gessow: Helicopter Research Problems
12/19
1. Bailey, F. J ., J r. : A Sim plifie d The ore tica l Method
of Determiningt h e C h a r a c t e r i s t i c s o f a L i f t i n
g R oto r i n Forwud F l igh t . NACARep. No. 716, 1941.
2. Bailey, F. J ., J r. , and Gustafson, F. B. : C h a r t s f o
r E s t im a ti o n o ft h e C h a r a c t e r i s t i c s o f a
Helicopter Rotor in Forward FHght. I -Pr of i le Dra g-Li f tRa t
io f o r Untwisted Rec tangular Blades. IlACAACR Do. ~ 4 r n 7
,194-4-
3. Gwtafson, F. B I : Flight Tests of the Sikomlgy BNS-1 ( ~ r m
y R - 4 ~ )Hel icop te r. I - Experimental Data on Level-FUght
Performancewith Origlnal Rotor Blades. NACA ME3 no. L s 1 0 ,
1945
4. Gwtafson, Fb B e , and Gessow, Alfred: Fl i gh t Tests of th
e SikorskyIDTS-1 (Army Y R - 4 ~ ) elicopter. I1 - Hovering and Ver
t ica l -F l igh tPerformance with the Original and an Alternate
Set of Main-RotorBlades, Including a Comparison with Hovering
Performance Theory.XACA MR No. L5DOga, 1945.
5. Gessow, Alfred, and Myers, G-arry.C., J r. : F l i g h t Te s
t s o f a H e l i -copter in Autorotation, Including a Compwiaon
with Theory. NACATN No. 1267, 1947.
6 . Dingeldein, Richard C . 4 chaef er , Rapmnd F . FuLl-Scale
Lnvesti -ga%ion of th e Aerodymmic Ch ar ac ter is tic s of a Typ
ical Single-RotorHelicopter i n Forward Fl i gh t . NACA TI? No.
1289,
1947.7 . Myers, Garry C., Jr. : Fl ig ht Measurements of Ze lic
op te r Blade Motion
with a Co~l~parison etween Theoretical and Experimental
Results.rnmA TN NO . 1266, 1947
8. Migotsky, Eugene: Fu ll-S cal e In ve st ig at io n of th e
Blade Motionof the W-2 Helicopter Rotor. NACA TN Xoi 1521,
1948.
9. Gustaf son, F. B . , nd Gessow, Alfred: Psalysis of
Flight-PerformanceMeasurements on a Twisted, Plywood-Covered H el
ic op te r Rotor inVarious Flight Conditions. NACA Tm No. ' 1595,
1948.
10 . Gustsfson, F. B.: Ef fe ct on Helico pter Performasce of M
odificationsi n P r o f i l e - D r a g Ch ara cte r is t ics of
Rotor -Blade A ir fo i l Sect ions.NACA ACR NO L4H05, 19440
11. &s%ow, Alfred: E ff ec t of Rotor-Blade Twist asd
Ph-Form Taper onEelicopter Hovering Performance 3ACA Tm No. 1342,
1948.
12. Gustafsoa, F. B., and Gessow, Alfre d: E f fe c t of Roto
r-Tip Speed onEelicopter Hovering Performance asd Maximum Forward
Speed. NACAARB No. L6~3.6, 946.
-
7/30/2019 Gessow: Helicopter Research Problems
13/19
13. Gustafson, F. B., and Myers, G. C. , J r. : St a l l i ng of
Hel icopterBlades. BXA !L% Roo 1083, 1946.
3-4. Gustafaon, P o B., and Gessai, Alfred: Effect of Blade
Stal-llfng mthe Eff iciency of a Helicopter Rotor a~ M e m d i n
FlfghL. N X ATfa no. 1250, 1947.
15- Gessow, Alfred: Fl ig ht Inv es tig at io n of Ef fe ct s of
Rotor-Blade T w i s t%onHelicopter Performance in th e High-Speed
and Ve r t i c a l -Autorotative-Descent Conditions. RACA TI? Bo.
1666, 1948.
l6. Stivers , Louis S. , J r. , asd Rice, Fred J . , J r . :
AerodynamicCharac te r i s t ics o f Four NACA Ai rfo i l Sec t
ions Des igned fo r G l i -copter Rotor Blades. M A B Ro. LTg02,
1946.
17. Coleman, RobertPo:
Theory of Self-Er ci ted Mechanical O s c i U t i a n sof Hinged
Rotor B l a h s . W A AN? o. 3G29, 1943.
18. Peingold, Arnold Me : Theory of Mechaelcal Oscillations of
Rotorswit h Two Hinged Blades . W A ARR No. 3113, 1 9 3
1 9 . Coleman, Robert P., and FeingoLd, Ax-n~Ld M.: Theory of G
r a dVibrations of a Two-Blade Helicopter Rotor on
AnisotropfcFlexible SupporDe . RACA 'I3 Ro. u& , 1947.
20. Coleman, Robert P. , sd Stempin, C a r l W. : A Prel iminary
Theoret icalStudy of Aemdynajmic In s t a b i l i t y of a
Two-Blade E e l i c q t e r R otor.XAcA RM Ro . ~ 6 ~ 2 3 ,946
21. Seibel, Chmles: Periodic derodynamfc Forces on Rotors Fn
FomaxdF l f & t o JOW* B e ~ o - %I., O ~ . U , no. 4, Oct.
1944, pp* 339-3420
22 Owen, J . B e B e : The Str es si ng of Gyroplane Blades i n
Steady ~ F ll gh t.R. & M. no. 1875, B r i t i s h A.R.C.,
1939.
23. Duberg, John E., and Luecker, Arthur R.: Comparisons of
Methods ofComputing Bending Moments i n H el ic op te r R otor
Blades in the Planeof Flapping. NACA ARR No. L5E23, 1945.
24. F k , Ale~a31der H.: The Bending of Rotor Blades. Jo ur .
Aero. S c i . ,vole 14, IIO. 1, J ~ s - 947; pp. 42-50.
25. Yu a n , Shao Wen: Beanding of Rotor Blade in the Plane of
Rotation.Jour. em. ~ c i . , o l . l h , no. 5 , Mag 1947, pp.
285-293-
26. Horvay, Gabriel: S tr e ss Analysis of Rotor Blades. Jour.
&roe Sc i . ,v o l e 14, no. 6, June 1947, .DO 315-336.
27. Coleman, Robert P., Feingold, Arnold M., and Stenpin, C a r
l W.:Evaluation of the Induced-Velocity Field of as. Ideal ized
HelicopterRotor. nACA ARR No. L5El0, 1945.
-
7/30/2019 Gessow: Helicopter Research Problems
14/19
: Contribu tions t o th e Dgnamic S t a b i l i t y of
Rotary-Wingraft with Articulated Blades. P& I - G en er al P r
i n c i ~ l e s .
l a t i o n No. F-TS-690-RE, Air Mate riel Command, July
29;1946.
: The Dynamic S t a b i l i t y of He&icoptere with Ar ti cu
la te dRotors - Second P a rt ia l Report. Trans la t ion no. F-TS
-1002-RE,Air Mate ri el command, Sept . 9, 1946.
30 . Bohenemser, K.: S t a b i l i t y in Hovering of'the
Helicopter with CentralRotor Location. Tra nsla tion Ao.
F-TS-~~T-HE, ir M ateriel Commasd,m * 1, 1946-
31. Hohenemer, K O : Long itudinal-Stabil i ty of th e
Helicopter in ForwardP l igh t . Translat ion no. F-TS -688 -HE,
Air M aterie l Commasd,aug. 2, 1946.
3 2 , Donovan, A. F., and Goland, M.: The Response of
Helicopters withArtic ulate d Rotors t o Cyclic Blade Pi tc h
Control. Jour. &ro.Sci . V O ~ . U, no. 4, ~ c t . 944, pp.
387-398.
33. Gustafson, F. B., and Reeder, J. P.: He li cop t er S t ab i
l i t y . NACAm no. L71104, 1948. .
34* Rseaer, John P., asd Gustafsan, 3'. B . Notes on the Fly- Q
u a l i t i e sof Helicopters. Paper presented a t th e Fourth
Annual Forum of th eh r i c m He li cop te r Soc ie ty (Ph il ade
lph ia , Perxla. ) , Apri l 22 -24,1948
-
7/30/2019 Gessow: Helicopter Research Problems
15/19
ROTOR SH-AFT POWER,
H P
vCALCULATED
0 20 40 6 0 8 0
TRANSLATIONAL VELOCITY, M PH
Figure .l. - Comparison of r oto r cha ract eris ics as
calculate& and measu red' in flight.
MAIN-ROTORSHAFT, HP
RATE OFCLIMB, FPM
ROTOR TIP SPEED, FPS
Figure 2.- Effect of rot or tip speed on hovering and ver tica l
flight performanceof sam ple helicopter.
-
7/30/2019 Gessow: Helicopter Research Problems
16/19
OF ROTATION
Figure 3.
FORVVARDSPEED, MP
V = 40 V. 7 0R P M = 2 1 0 R P M = 210
DIRECTIONOF FLIGHT
V = 70
R P M = 22 5
Effec t of fo rwa rd speed and r o to r t ip speed on ro torcb
ladestall.
2 0 0
160
120
8 0
4 0
0I
3 0 0 3 8 0 46 0 5 4 0 620MINIMUM ROTOR TIP SPEED, FPS
Figure 4.- Variat ion of minimum r o to r t i p speed , as s e t
by ro to r-b lade s t a l l ,wi th fo rward speed .
-
7/30/2019 Gessow: Helicopter Research Problems
17/19
ROTOR PROFILE-DRAG POWER, HP
1207
BLADE
WITHOUT BLADE STALLINGA
TRANSLATIONAL VELOCITY, MPH
Figure 5.- Effects of rotor-blade st al l and blade twist on
rotor profile-dragpower.
E F F E C T O F S TA L L A N G L E E F F E C T O F C R I T IC A
L M A C H N O.
MACH NO. AT ADVANCING TIP = -75 S T A L L A NG LE = 12
12 14 16 18 20 -7 ' .8 .9 I-0
ROTOR - B L A D E - S E C T I O N R O T O R - B L A D E - S E C
T I O NS T A L L A N G L E L I M I T I N G M A C H N U M B E R
Figure 6. - Effect of r otor-blade -sect ion stal l angle and
limiting Machnumber on the permissible load carried by a sample
helicopter,
-
7/30/2019 Gessow: Helicopter Research Problems
18/19
SECTION D R A GCOEFFICIENT, c d
.028iI
.024NACA 23012
\AG A 8-H-12
7 --C-- REYNOLDS NO.\---- - 2 . 6 ~ lo6- .0 x 1o6
SECTION LIFT COEFFICIEMT, c,
Figure 7.- Comparison of the profile-drag characteristics of the
NACA 23012and NACA 8-H-12 a ir fo il sect ion s.
PITCH ATTITUDEl o
DEG-10
A
ACCELERATION1.2
9
.8
I I
10 2 0
SECONDS
Figure 8. - Time history of a he licopter oscillation obtained
in flight at40 miles per hour.
-
7/30/2019 Gessow: Helicopter Research Problems
19/19
,-STICK POSITION0
IN.Fw 'D
5
ACCELERATION
SECONDS
Figure 9.- Time history of the divergent motion of a helicopter
obtained
in flight at 65 miles p er hour.