Embed Size (px)
Citation preview

Germund Dahlquist’sclassical papers
on Stability Theory
– p.1/34
Germund Dahlquist’sclassical papers
on Stability Theory
Gerhard Wanner
– p.1/34
Germund Dahlquist’sclassical papers
on Stability Theory
Gerhard Wanner
“You know, I am a multistep man ... and don’t tell anybody, butthe first program I wrote for the first Swedish computer was aRunge-Kutta code ...”
(G. Dahlquist 1982, after 10 glasses of wine)
– p.1/34

Germund Dahlquist’sclassical papers
on Stability Theory
Gerhard Wanner
“You know, I am a multistep man ... and don’t tell anybody, butthe first program I wrote for the first Swedish computer was aRunge-Kutta code ...”
(G. Dahlquist 1982, after 10 glasses of wine)
“Mr. Dahlquist, when is the spring coming ?”“Tomorrow, at two o’clock.”
(Weather forecast, Stockholm 1955)– p.1/34

1. First Dahlquist Barrier (1956, 1959).“This work must certainly be considered as one of the greatclassics in numerical analysis”
(Å. Björk, C.-E. Fröberg 1985).
– p.2/34

– p.3/34

“The main result is rather negative (Thm. 4), but there are newformulas of this general class which are at least comparable,.”
(G. Dahlquist 1956.)– p.4/34

Proof.
– p.5/34

– p.6/34

Thirty yearslater ...
– p.7/34

– p.8/34

... and what can this “modern” ketchup book do better ..?
– p.8/34

Instead of
– p.9/34

Instead of
it hasyn+2 + 4yn+1 − 5yn = h(4fn+1 + 2fn).
.0 .5 1.01
2
3
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
h = 0.1
h = 0.05h = 0.05
h = 0.025h = 0.025
– p.9/34

Instead of
– p.10/34

Instead of
it hasρ(ζ) = αkζ
k + αk−1ζk−1 + . . . + α0
σ(ζ) = βkζk + βk−1ζ
k−1 + . . . + β0.
– p.10/34

Instead of
– p.11/34

Instead of
it has
ζ =z + 1
z − 1or z =
ζ + 1
ζ − 1
R(z) = (z − 1
2)kρ(ζ) =
k∑j=0
ajzj,
S(z) = (z − 1
2)kσ(ζ) =
k∑j=0
bjzj
– p.11/34

Instead of
– p.12/34

Instead of
it has
R(z)(logz + 1
z − 1)−1−S(z) = Cp+1(
2
z)p−k
+O((2
z)p−k+1
) for z →
– p.12/34

Instead of
– p.13/34

Instead of
it has
(logz + 1
z − 1)−1
=z
2− µ1z
−1 − µ3z−3 − µ5z
−5 − . . .
– p.13/34

and finally, instead of
– p.14/34

we read
µ2j+1 = − 1
2πi
∫1
−1
x2j[(log1 + x
1 − x+ iπ)
−1 − (log1 + x
1 − x− iπ)
−1]dx
=
∫1
−1
x2j[(log1 + x
1 − x)2+ π2]
−1dx > 0.
...and one can do nothing better ...
– p.15/34

we read
µ2j+1 = − 1
2πi
∫1
−1
x2j[(log1 + x
1 − x+ iπ)
−1 − (log1 + x
1 − x− iπ)
−1]dx
=
∫1
−1
x2j[(log1 + x
1 − x)2+ π2]
−1dx > 0.
...and one can do nothing better ... just add a nice picture ...
0−1 1
γ
– p.15/34

we read
µ2j+1 = − 1
2πi
∫1
−1
x2j[(log1 + x
1 − x+ iπ)
−1 − (log1 + x
1 − x− iπ)
−1]dx
=
∫1
−1
x2j[(log1 + x
1 − x)2+ π2]
−1dx > 0.
...and one can do nothing better ... just add a nice picture ...
0−1 1
γ
“Although there exist many different proofs for the theoremtheoriginal published proof still appears very elegant,...”
(R. Jeltsch, O. Nevanlinna 1985)
– p.15/34

2. The Second Dahlquist Barrier (1963).
– p.16/34

I didn’t like all these “strong”, “perfect”, “absolute”,“generalized”, “super”, “hyper”, “complete” and so on inmathematical definitions, I wanted something neutral; andhaving been impressed by David Young’s “propertyA”, I chosethe term “A-stable”.
(G. Dahlquist, in 1979).
the famous definition ...
– p.17/34
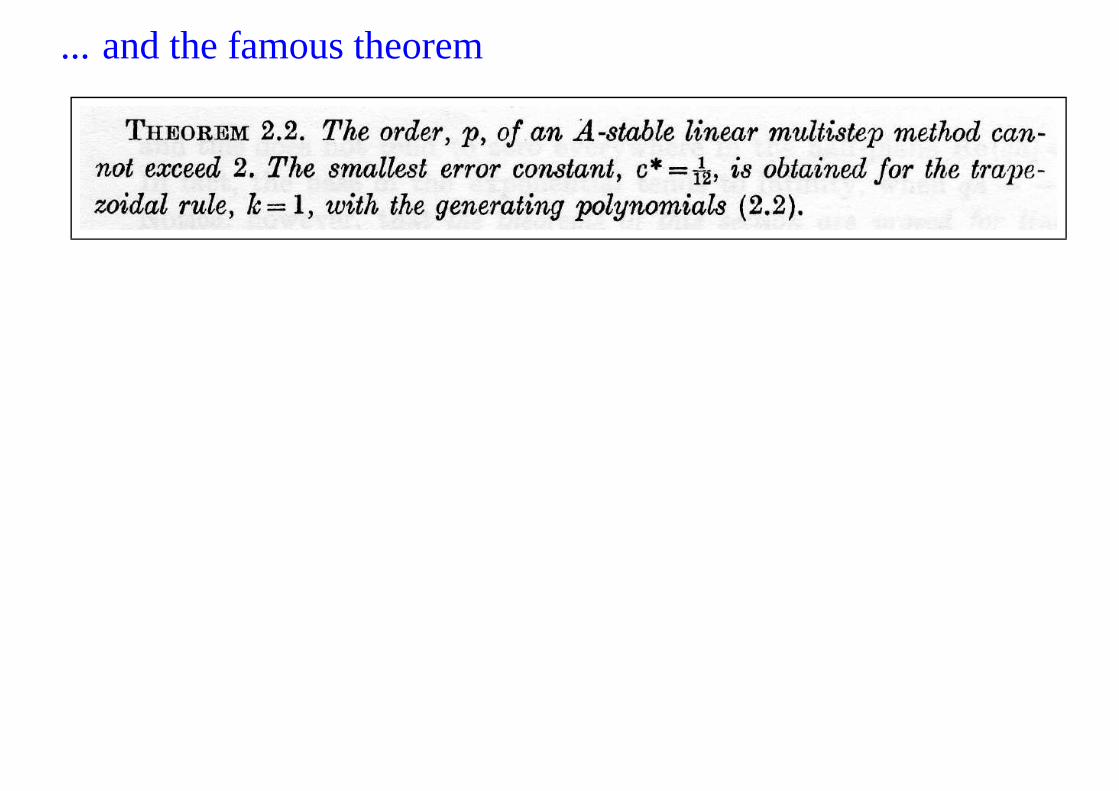
... and the famous theorem
– p.18/34

... and the famous theorem
... and some years later ...
“Talking on stiff differential equations in Sweden, is likecarrying coals to Newcastle...”
(W.L. Miranker, Göteborg 1975).
“certainly one of the most influential papers ever publishedinBIT”
(Å. Björk, C.-E. Fröberg 1985).
– p.18/34

The secondketchup
– p.19/34

The thirdketchup
– p.20/34

Proofs of Dahlquist’s Theorem.
“I searched for a long time, finally Professor Lax showed me theRiesz-Herglotz theorem and I knew that I had my theorem..”
(G. Dahlquist, Stockholm 1979, private comm.)
– p.21/34

Proofs of Dahlquist’s Theorem.
“I searched for a long time, finally Professor Lax showed me theRiesz-Herglotz theorem and I knew that I had my theorem..”
(G. Dahlquist, Stockholm 1979, private comm.)
“The stars were, however, not reached until 1978”.
(another citation from another preface of another special
issue of BIT (vol. 41, No. 5, 2001))
– p.21/34

Original motiv.: Ehle’s Conj. (with E.Hairer and S.Nørsett)
−6 −3 0 3 6
3
6
−6
−3
k = 3k = 3j = 3j = 3
−6 −3 0 3 6
3
6
−6
−3
k = 2k = 2j = 4j = 4
−6 −3 0 3 6
3
6
−6
−3
k = 1k = 1j = 5j = 5
−6 −3 0 3 6
3
6
−6
−3
k = 0k = 0j = 6j = 6
Conjecture. A-stable ⇔ k ≤ j ≤ k + 2.– p.22/34

Ehle’s Conjecture ; Order Stars
−6 −3 0 3 6
3
6
−6
−3
k = 3k = 3j = 3j = 3
−6 −3 0 3 6
3
6
−6
−3
k = 2k = 2j = 4j = 4
−6 −3 0 3 6
3
6
−6
−3
k = 1k = 1j = 5j = 5
−6 −3 0 3 6
3
6
−6
−3
k = 0k = 0j = 6j = 6
Theorem. A-stable ⇐ k ≤ j ≤ k + 2.– p.23/34

Ehle’s Conjecture ; Order Stars
−6 −3 0 3 6
3
6
−6
−3
k = 3k = 3j = 3j = 3
−6 −3 0 3 6
3
6
−6
−3
k = 2k = 2j = 4j = 4
−6 −3 0 3 6
3
6
−6
−3
k = 1k = 1j = 5j = 5
−6 −3 0 3 6
3
6
−6
−3
k = 0k = 0j = 6j = 6
Theorem. A-stable ⇔ k ≤ j ≤ k + 2.– p.24/34

Example: BDF2.
3
2yn+1 − 2yn +
1
2yn−1 = hfn+1
y′ = λy, µ = hλ ⇒ (3
2− µ)ζ2 − 2ζ +
1
2= 0.
Algebraic equation forζ ⇒ ζ1,2(µ) =2 ±√
1 + 2µ
3 − 2µ
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |eµ|
– p.25/34

Example: BDF2. • Implicit stage ⇒ Pole ofζ
3
2yn+1 − 2yn +
1
2yn−1 = hfn+1
y′ = λy, µ = hλ ⇒ (3
2− µ)ζ2 − 2ζ +
1
2= 0.
Algebraic equation forζ ⇒ ζ1,2(µ) =2 ±√
1 + 2µ
3 − 2µ
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |eµ|
– p.26/34

Example: BDF2.
• Implicit stage ⇒ Pole ofζ
• Order ⇒ eµ − ζ1(µ) = C · µ3 + . . .
Algebraic equation forζ ⇒ ζ1,2(µ) =2 ±√
1 + 2µ
3 − 2µ
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |eµ|
– p.27/34

Example: BDF2.
• Implicit stage ⇒ Pole ofζ
• Order ⇒ eµ − ζ1(µ) = C · µ3 + . . .
• A-stable ⇒ order star away from imag. axis.
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |eµ|
– p.28/34

Example: BDF3.
11
6yn+1 − 3yn +
3
2yn−1 − 1
3yn−2
= hfn+1
(11
6− µ)ζ3 − 3ζ2 +
3
2ζ − 1
3= 0.
– p.29/34
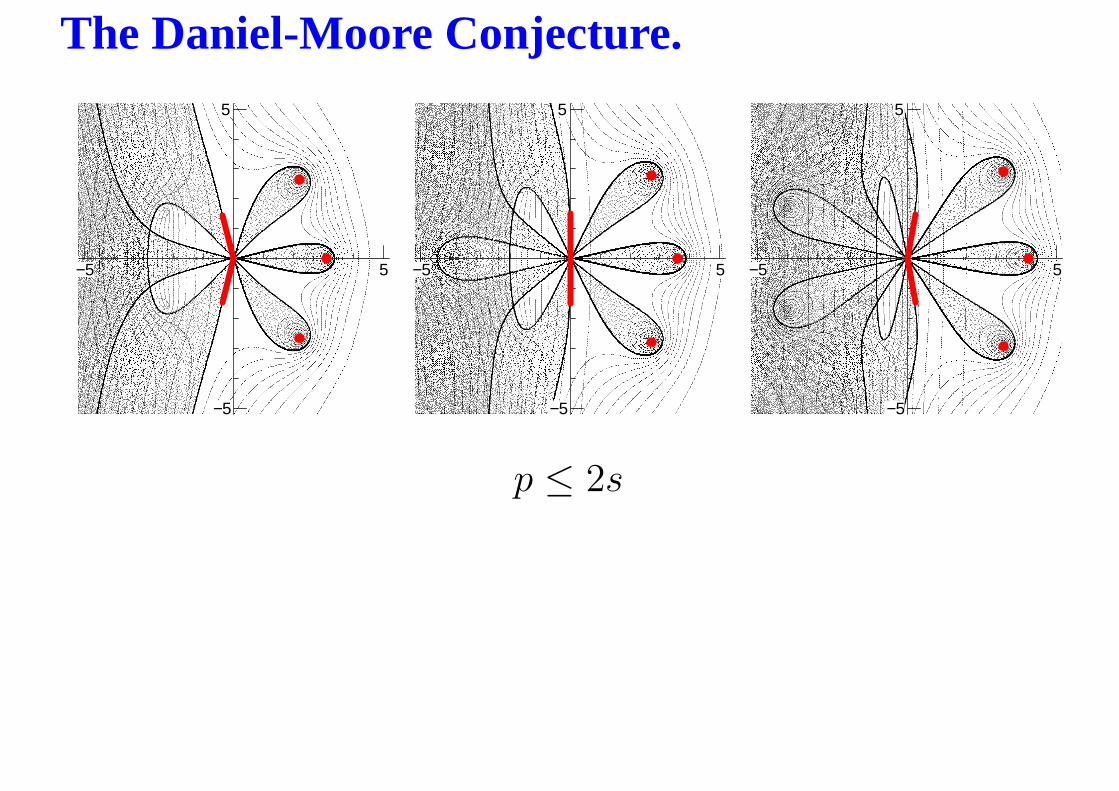
The Daniel-Moore Conjecture.
−5 5
5
−5
−5 5
5
−5
−5 5
5
−5
p ≤ 2s
– p.30/34

Error constant.
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |eµ|
−.5 1.5
1
−1
−.5 1.5
1
−1
|ζ(µ)| > |2+µ
2−µ|
– p.31/34

Jeltsch-Nevanlinna Theorem.
−1
1
−1
ADAMS2RK2
B
Sscal1 6⊃ Sscal
2 and Sscal1 6⊂ Sscal
2– p.32/34

– p.33/34

– p.34/34