Embed Size (px)
Citation preview
Gerhard K. Kraetzschmar
The Cool Science Institute
Educational Robotics
A Glimpse on Robotics Tutorial Material
Overview
• What is a robot?• Characterization• Examples• Anatomy
• Why do computer scientists care about robots?• Survey of Educational Robotics Technology• Lego Mindstorms• Boards for Use with Lego Technics• Tetrixx
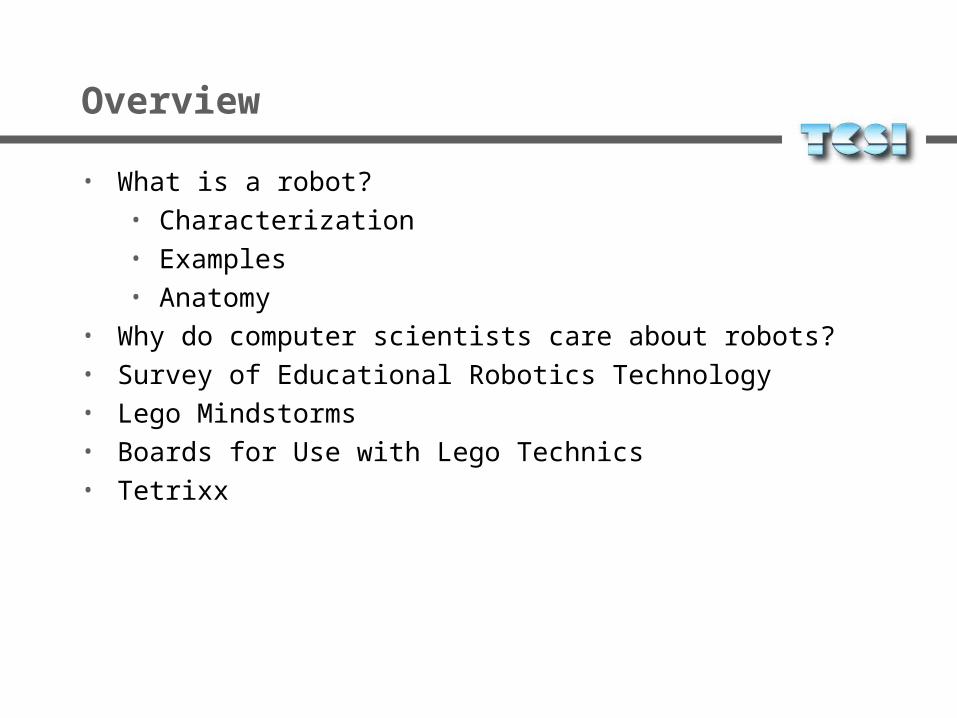
Autonomous Mobile Robots
• Machines capable of moving about their environment and demonstrating some kind of intelligent behavior
• Permanent Perception-Cognition-Action cycle
• Autonomy is the degree to which an agent's decisions are determined by its own observations and experience
LEGO-Bots
Kheperas
Truck
Sparrows
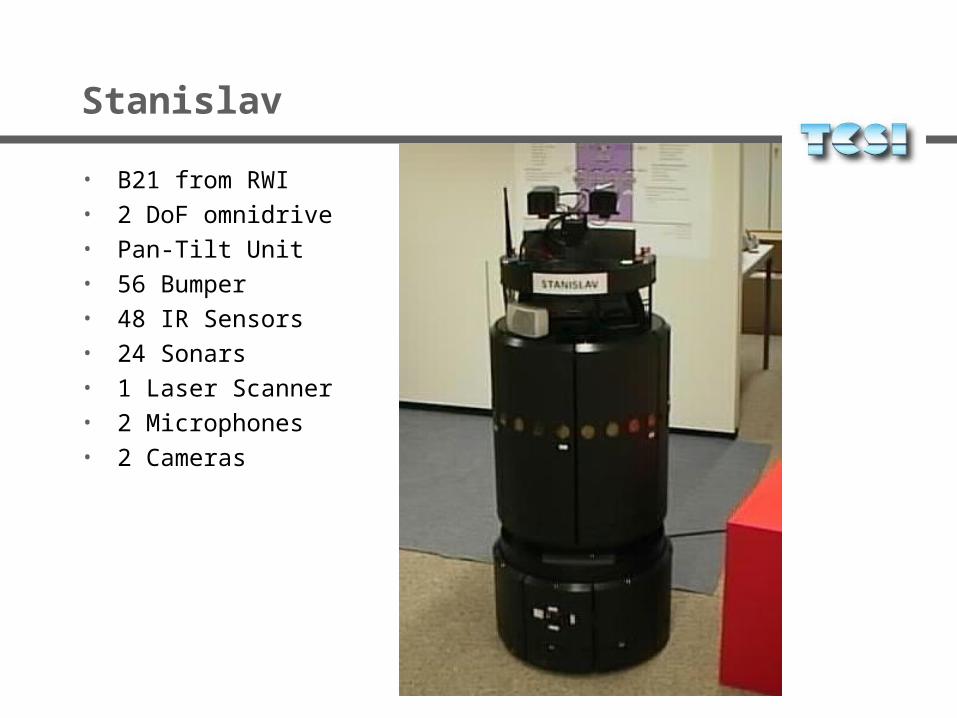
Stanislav
• B21 from RWI• 2 DoF omnidrive• Pan-Tilt Unit• 56 Bumper• 48 IR Sensors• 24 Sonars• 1 Laser Scanner• 2 Microphones• 2 Cameras
Robot Anatomy
• Effectors• mobile bases• manipulators (arms, hands, grippers, kickers)• other
• Sensors• Electronics• Software
• operating systems• programming languages• programming environments• programming methodology
• Robot control architectures
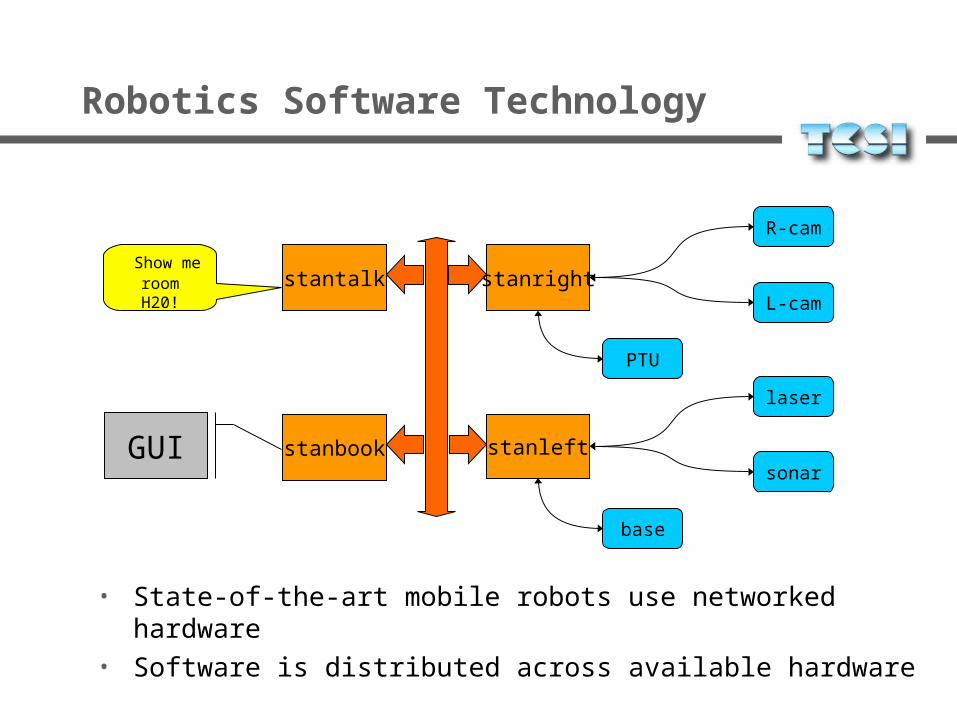
Robotics Software Technology
• State-of-the-art mobile robots use networked hardware• Software is distributed across available hardware
stanleft
laser
stantalk
stanbook
stanright
sonar
base
L-cam
PTU
R-cam
Show me room H20!
GUI
Robotics is AI-complete
• Complex autonomous mobile robots must• represent various kinds of knowledge
• knowledge representation• spatiotemporal representations
• make inferences from knowledge and plan their action • inference; deduction, abduction• planning and scheduling
• perceive their environment• sensor interpretation and sensor fusion• pattern recognition, computer vision
• interact with humans• speech, natural language processing
• adapt to changing environments and tasks• machine learning• neural network learning, reinforcement learning• evolutionary learning
Three Laws of Robotics
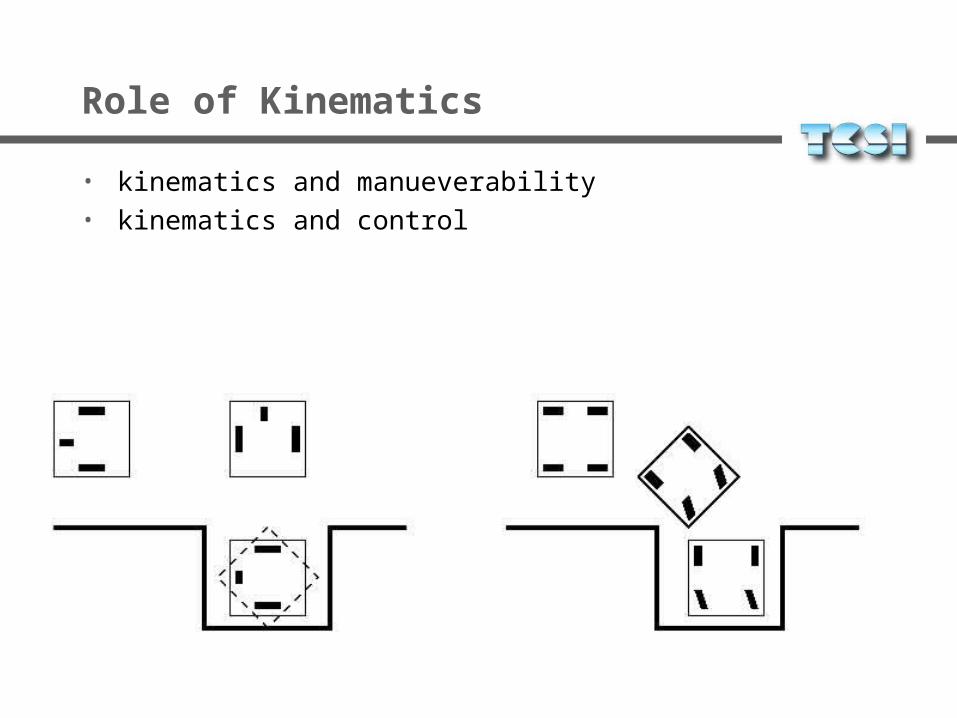
Role of Kinematics
• kinematics and manueverability• kinematics and control
Robot Motion
• Wheeled robots• Tracked robots• Legged robots• Humanoid robots• Exotic robots
Wheeled Robots
• easy to build• easy to control• need flat terrain• cannot climb stairs
Tracked Robots
• more difficult to build• easy to control• good on rough terrain• cannot climb stairs
Legged Robots
• hard to build• hard to control• good on rough terrain• can climb stairs in principle
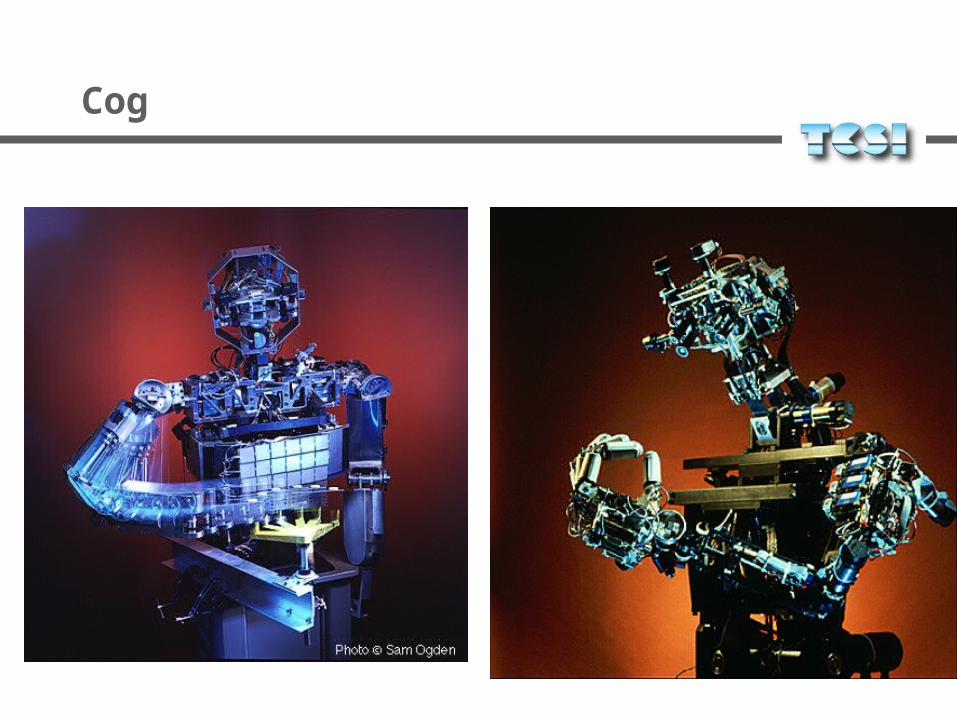
Cog
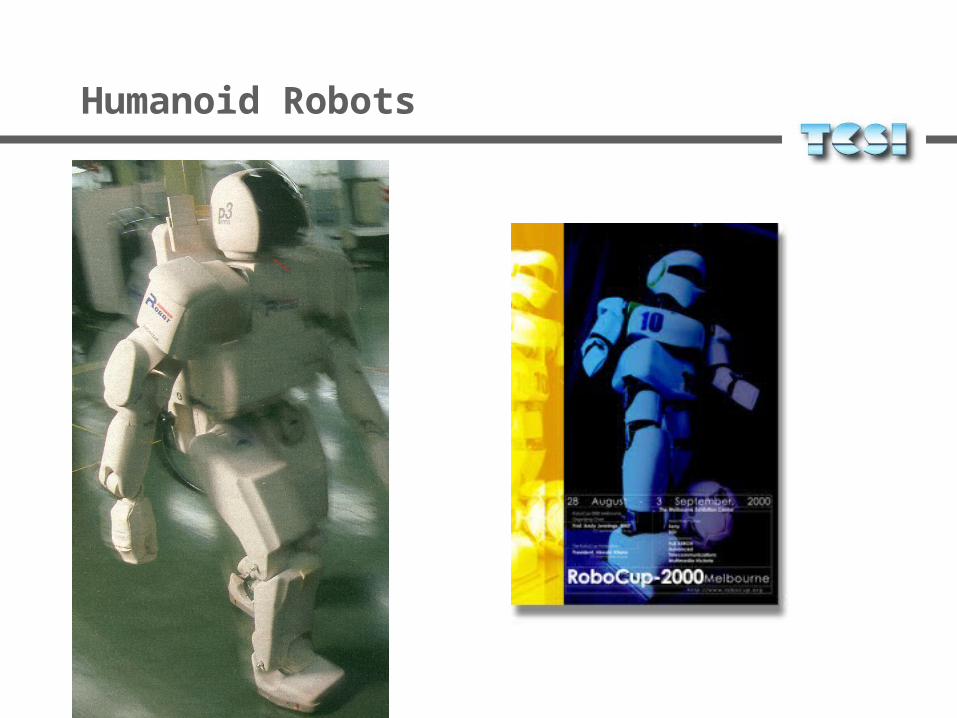
Humanoid Robots
Exotic robots
• hard to build• hard to control• stabilization is a major issue• solutions for virtually all environments
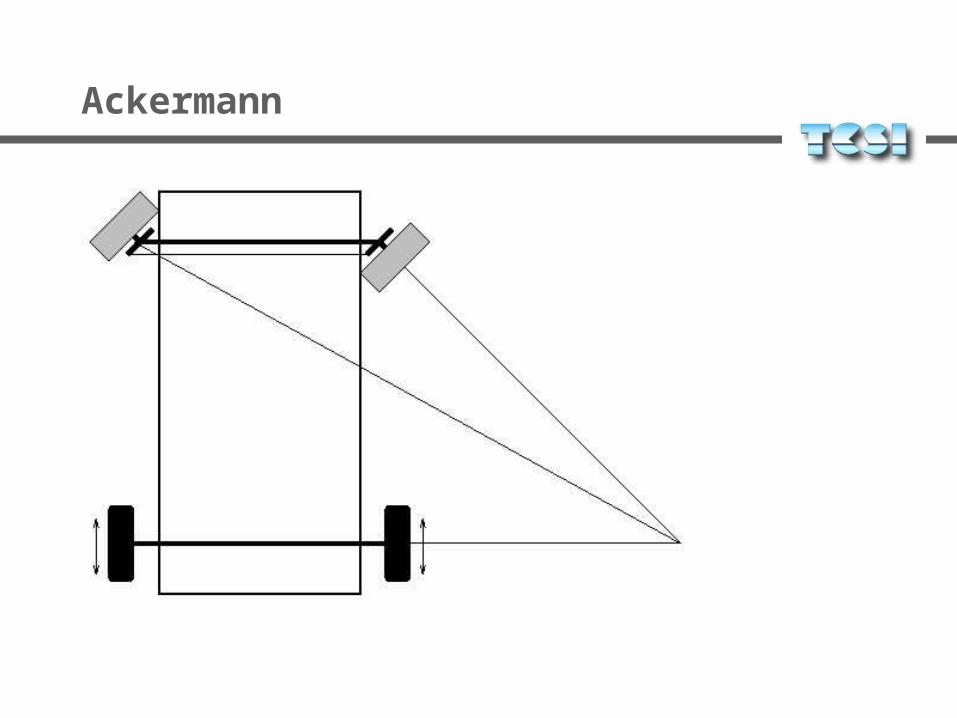
Ackermann
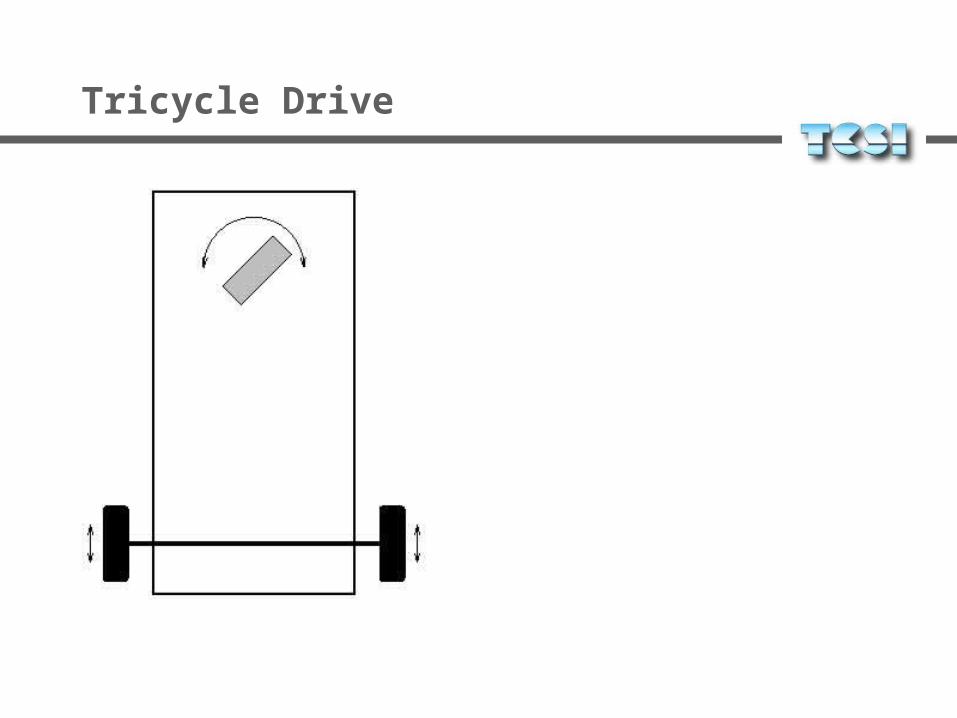
Tricycle Drive
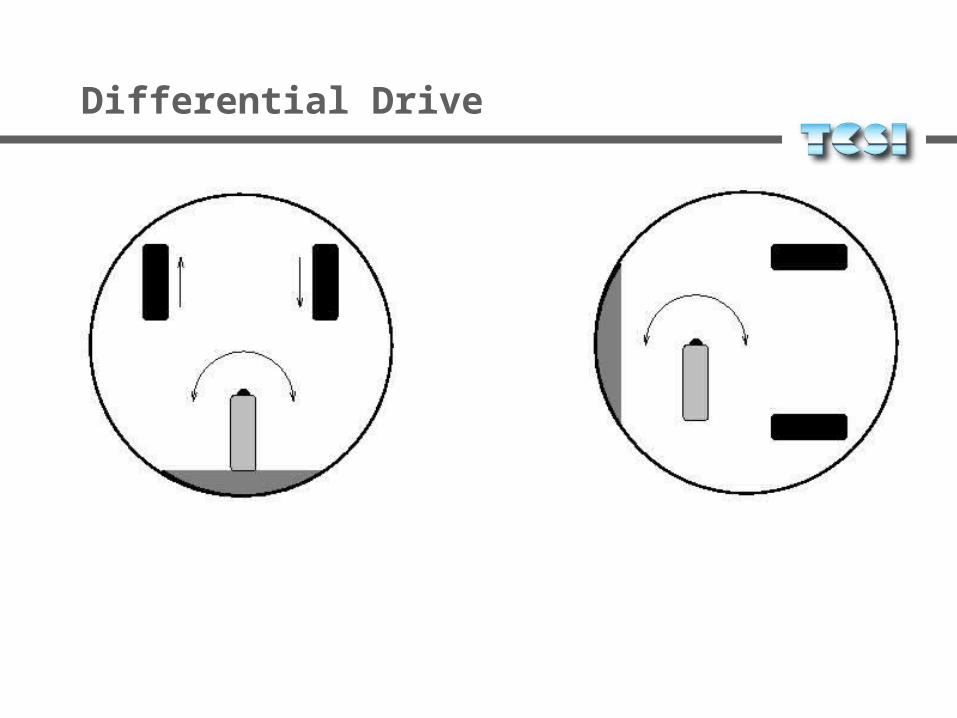
Differential Drive
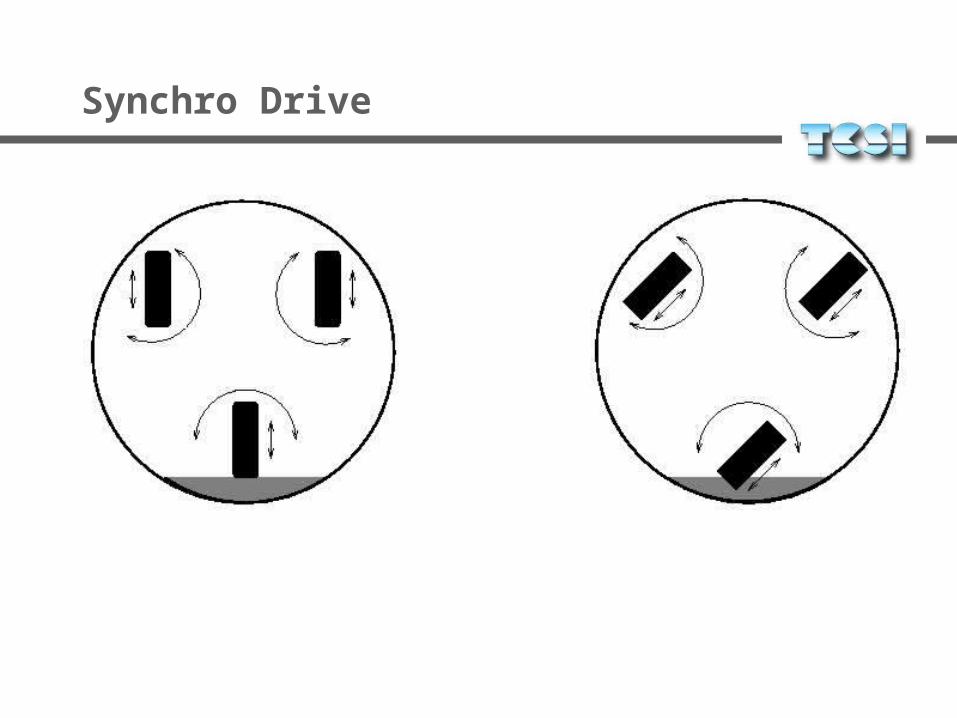
Synchro Drive
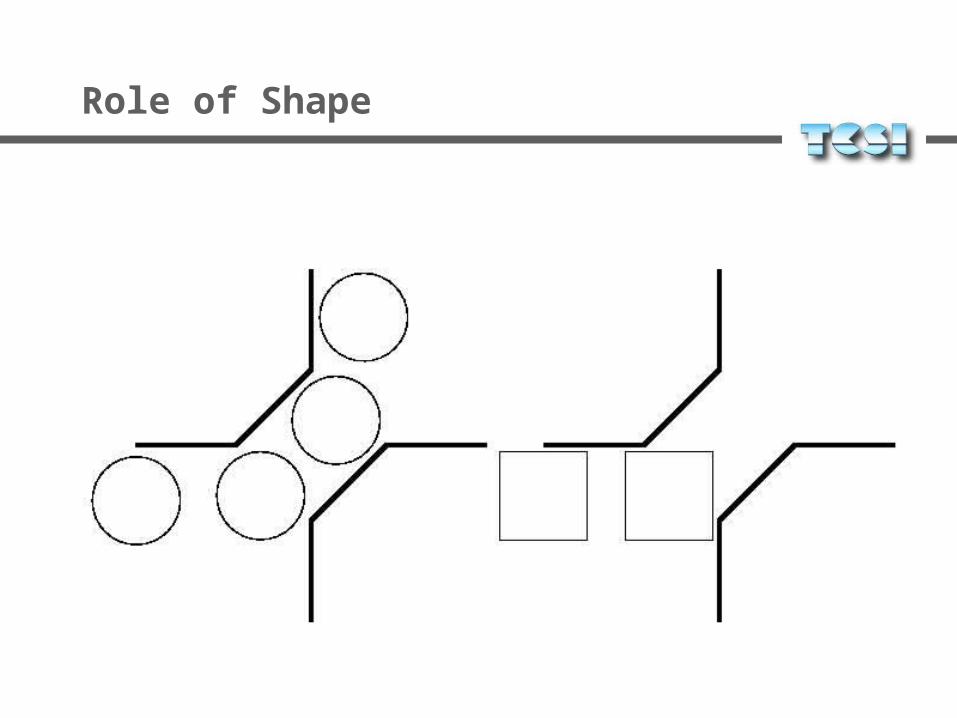
Role of Shape
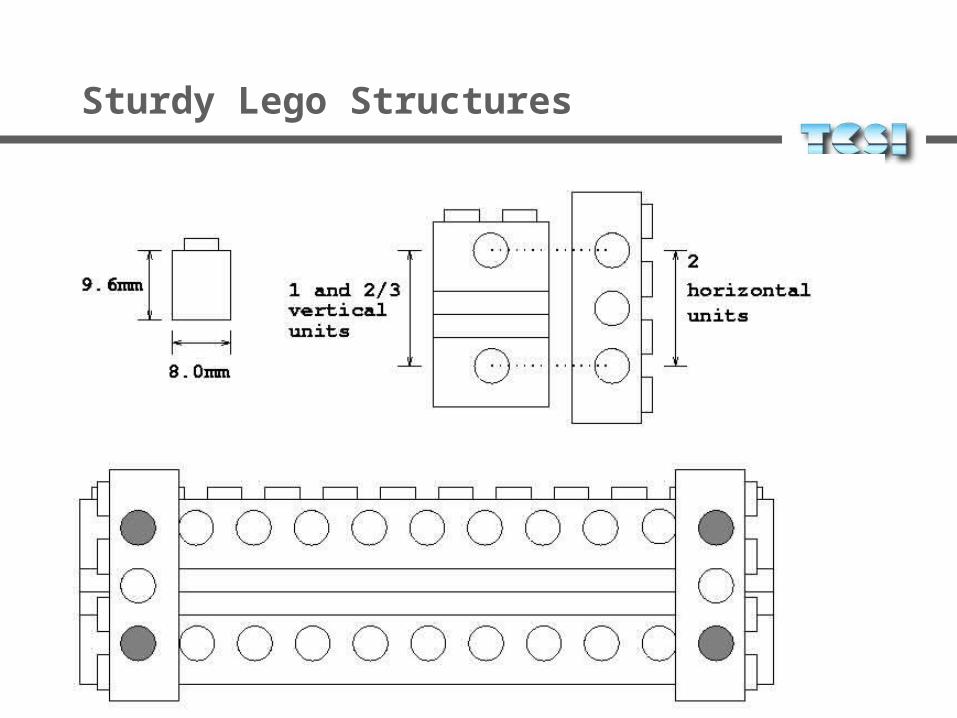
Sturdy Lego Structures
Lego Mathematics
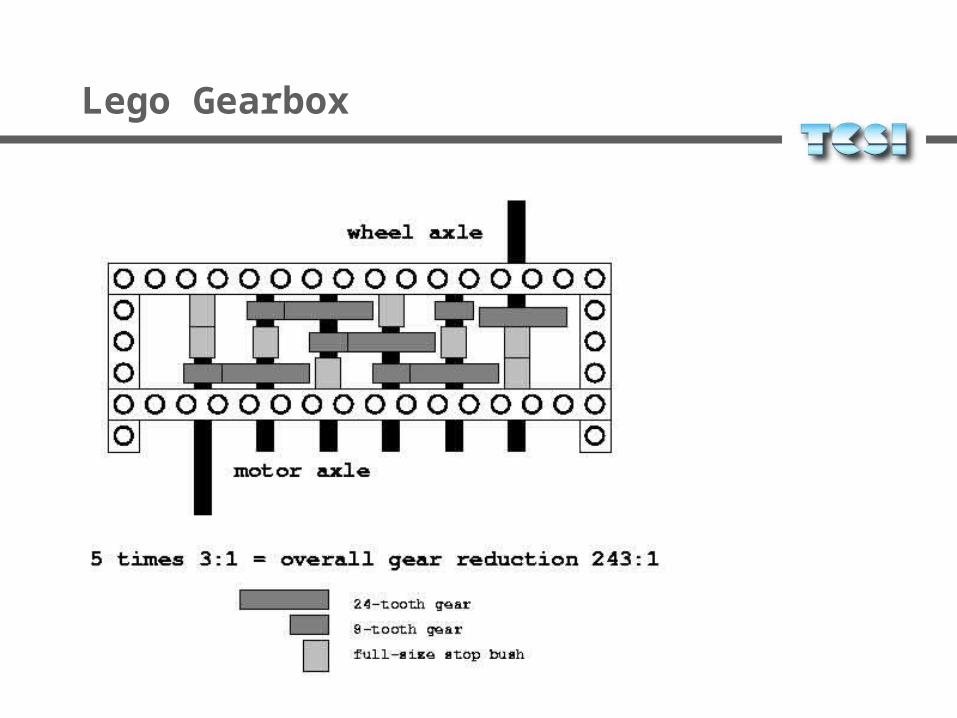
Lego Gearbox
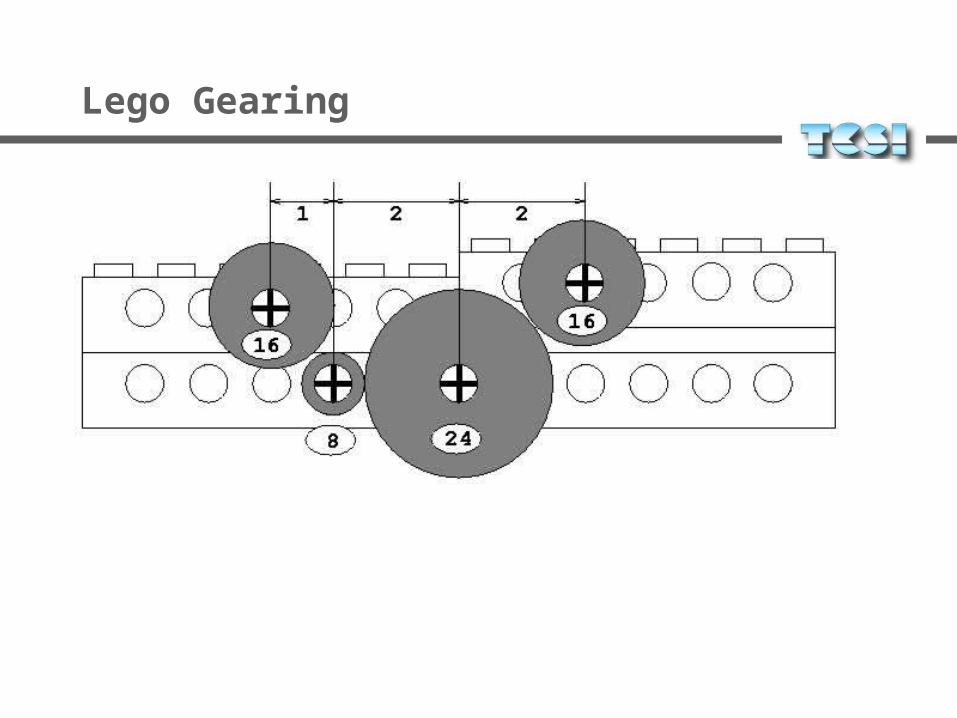
Lego Gearing
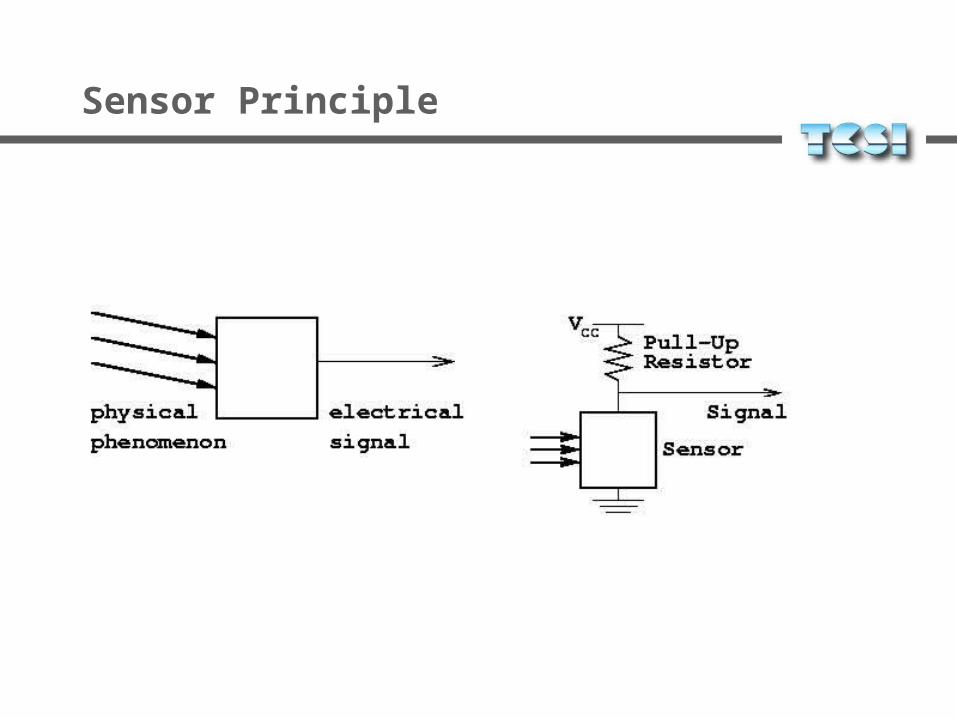
Sensor Principle
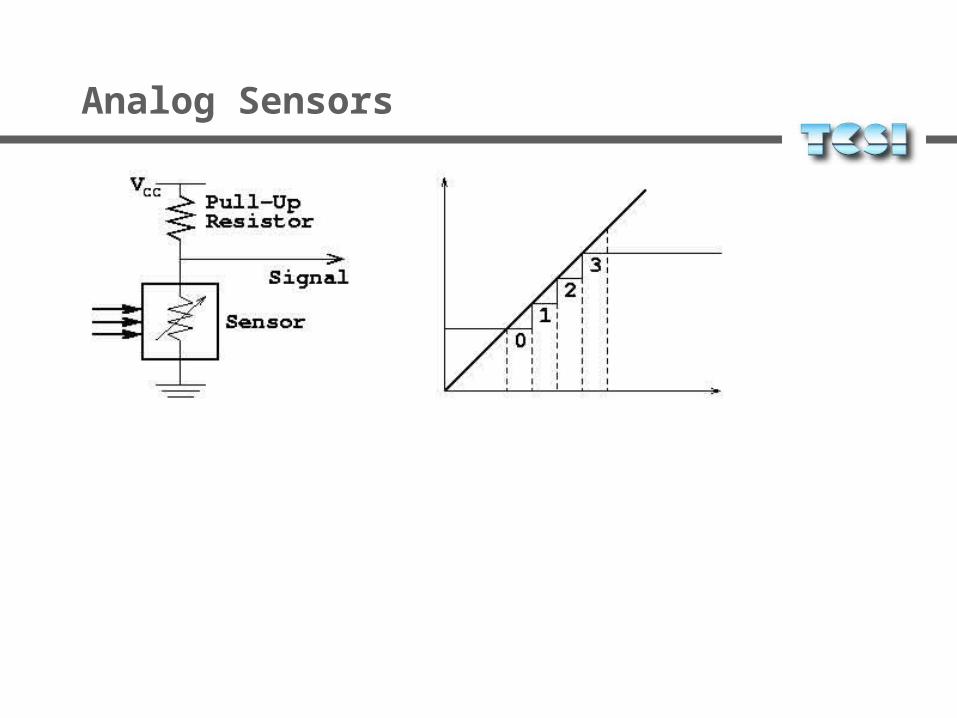
Analog Sensors
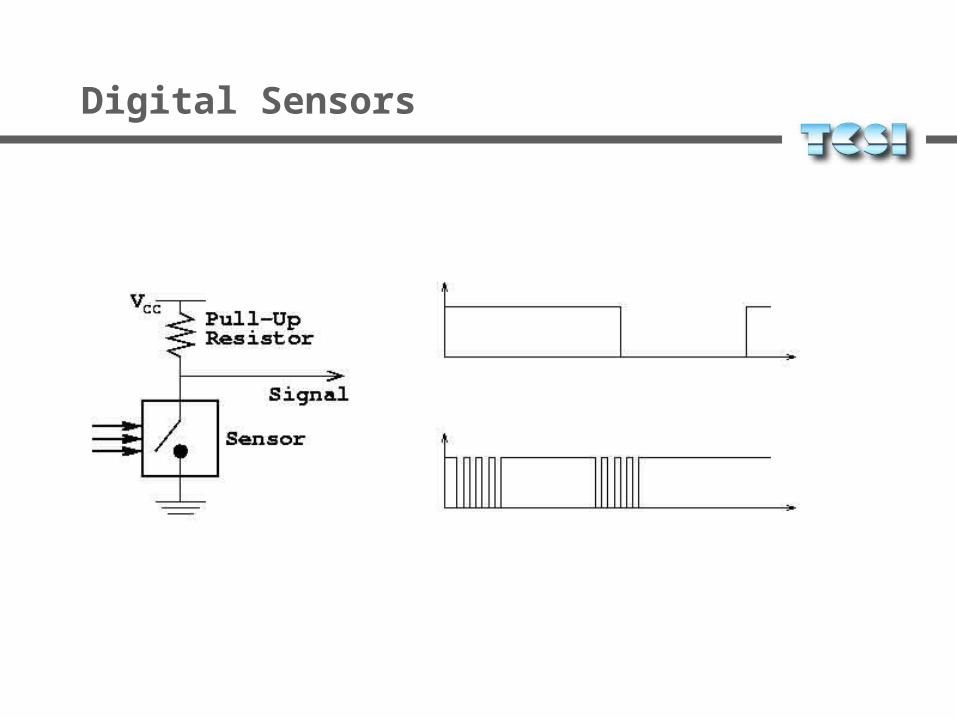
Digital Sensors
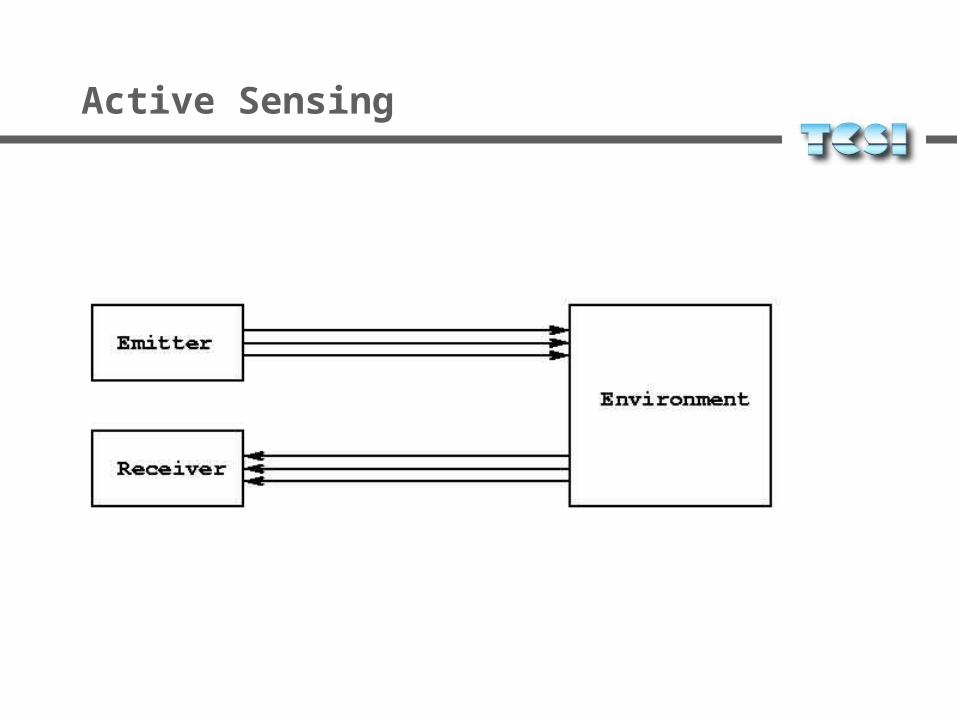
Active Sensing
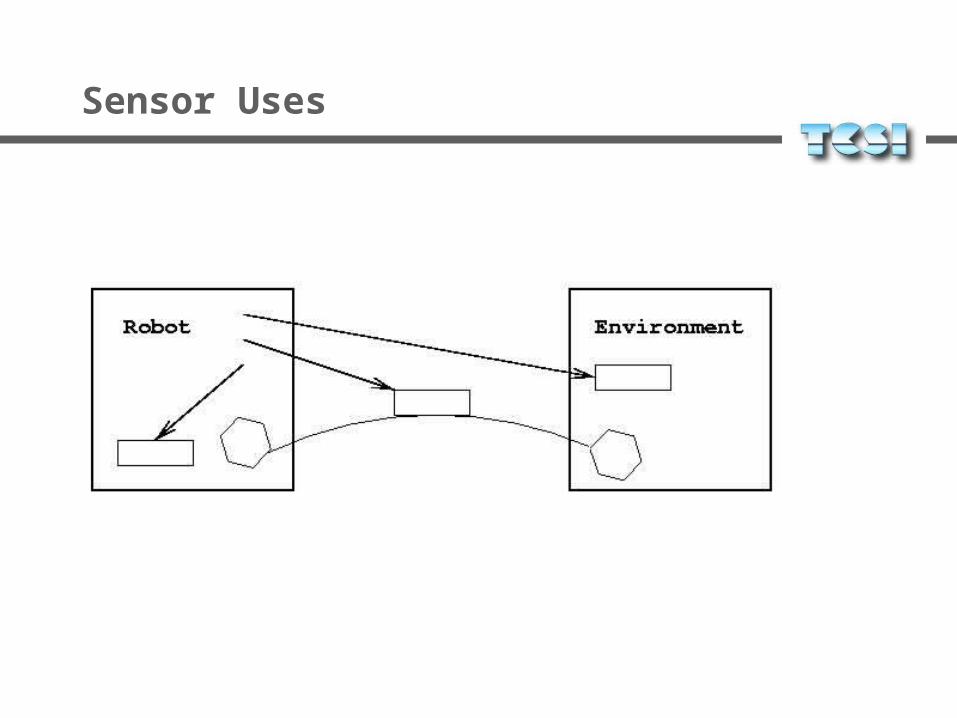
Sensor Uses
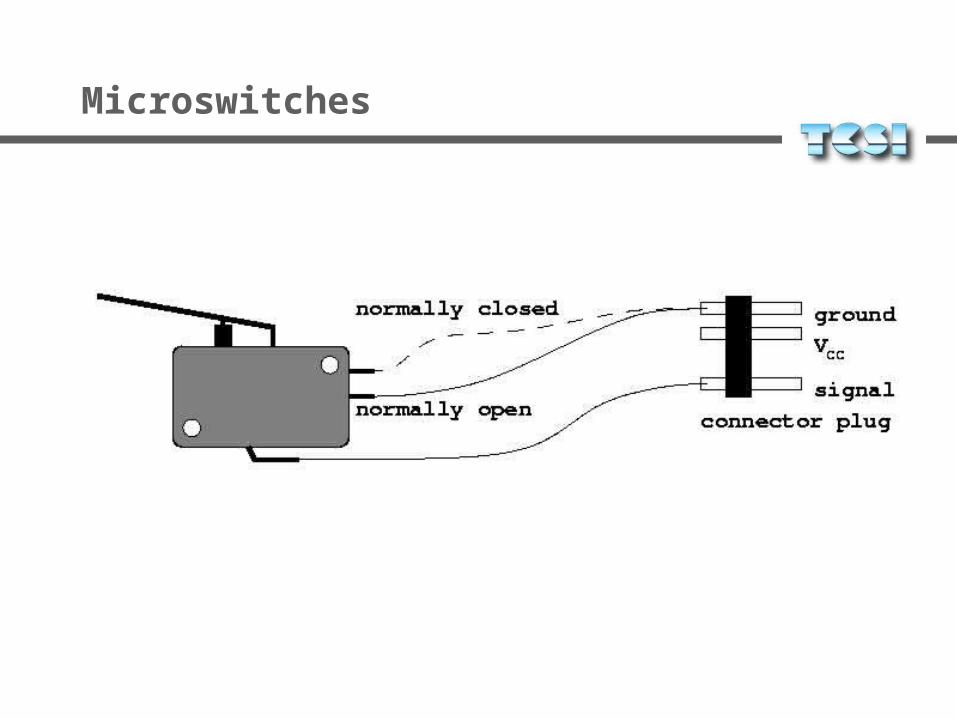
Microswitches
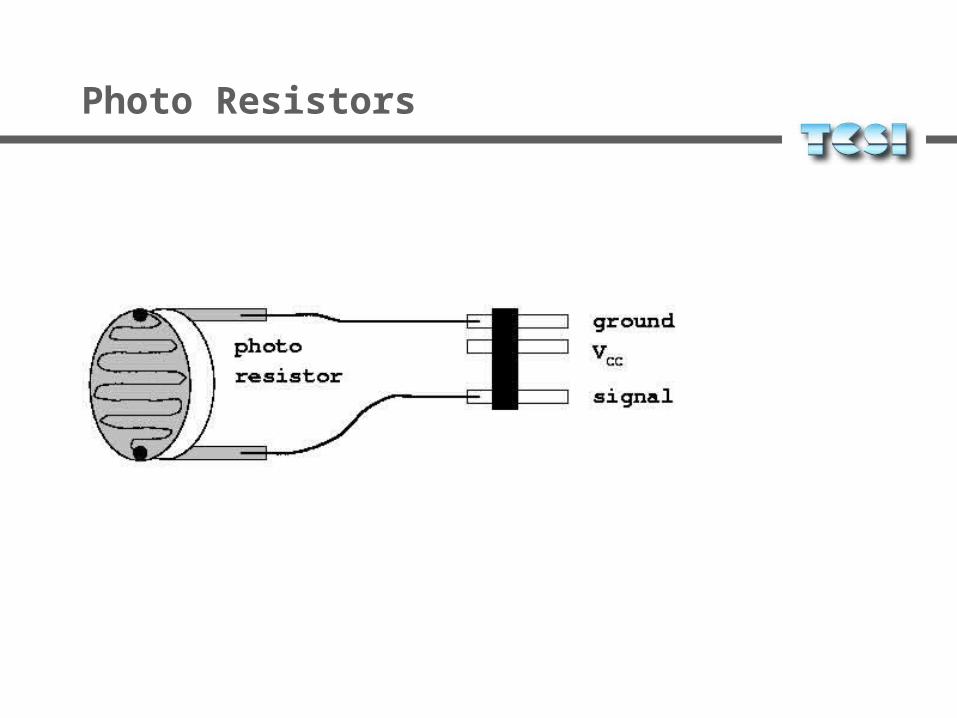
Photo Resistors
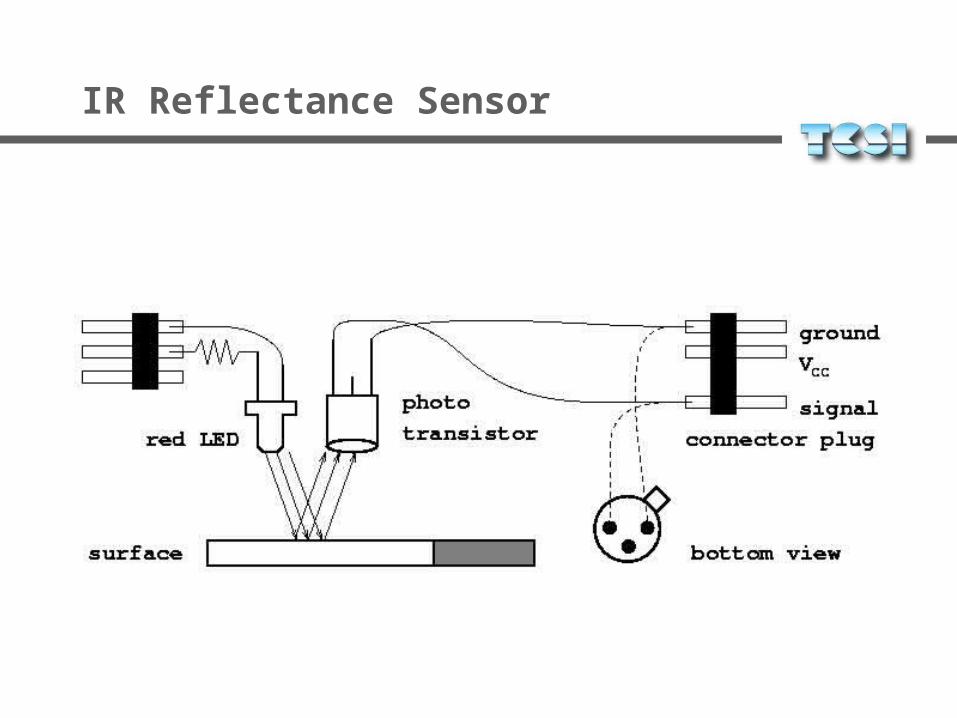
IR Reflectance Sensor
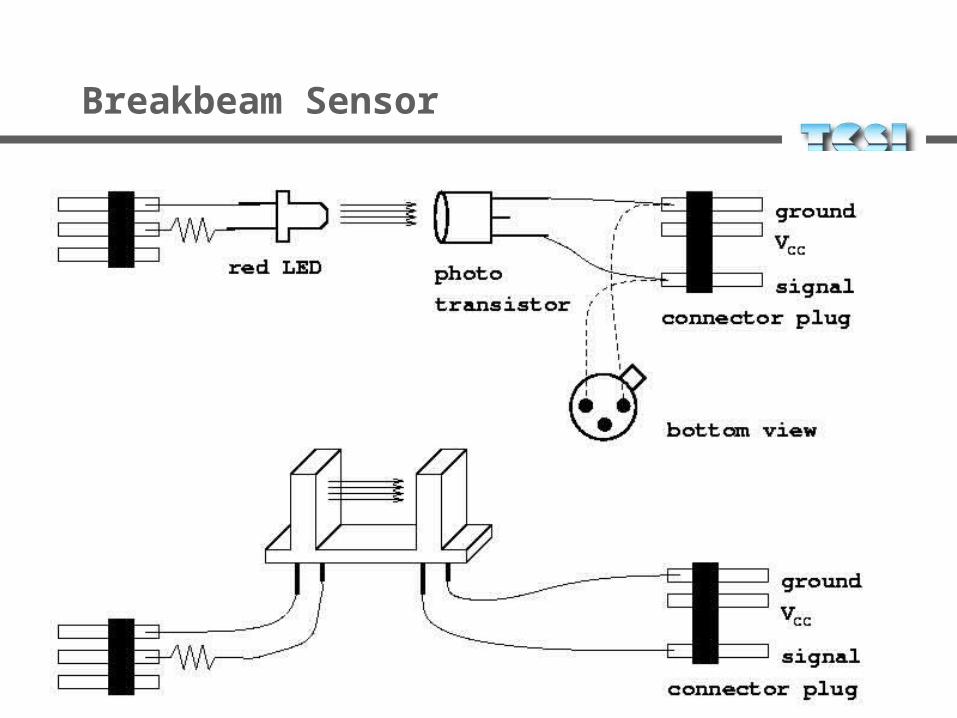
Breakbeam Sensor
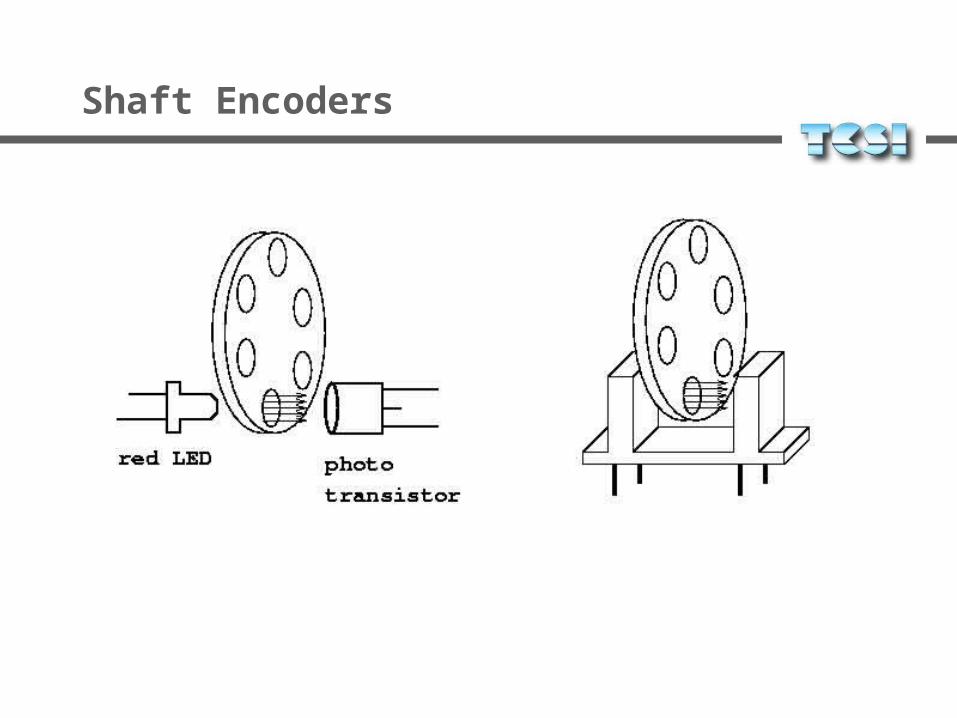
Shaft Encoders
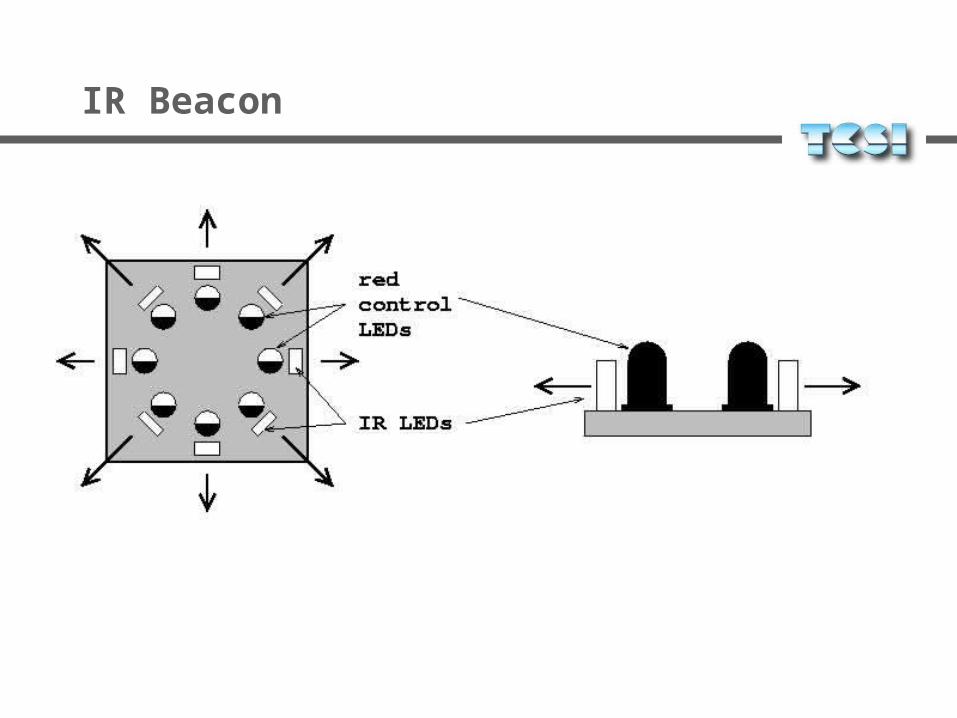
IR Beacon
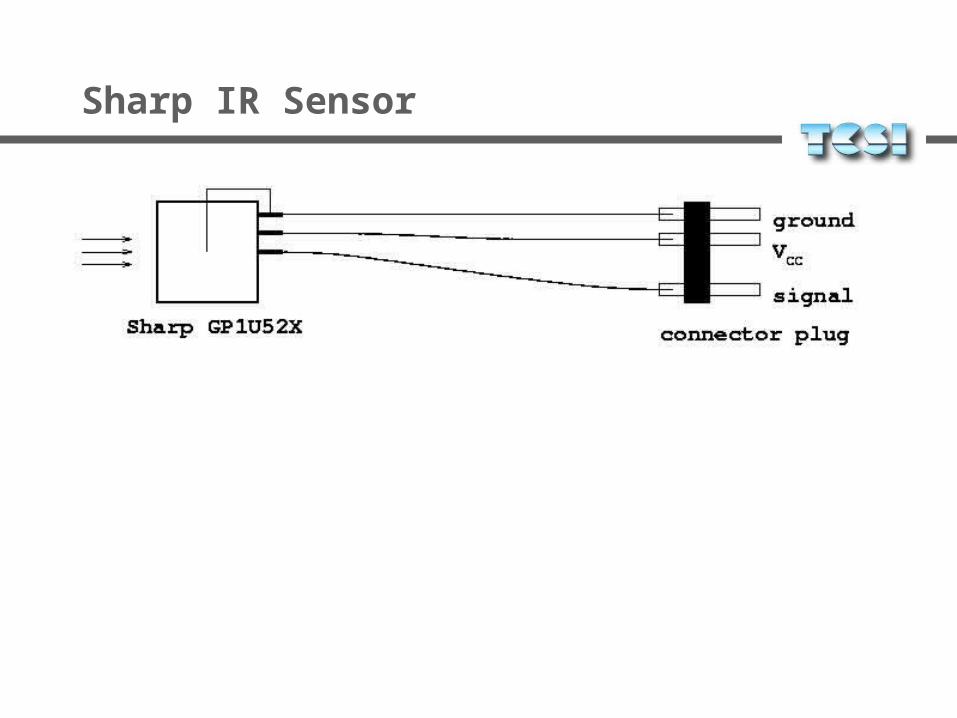
Sharp IR Sensor
DC Motors
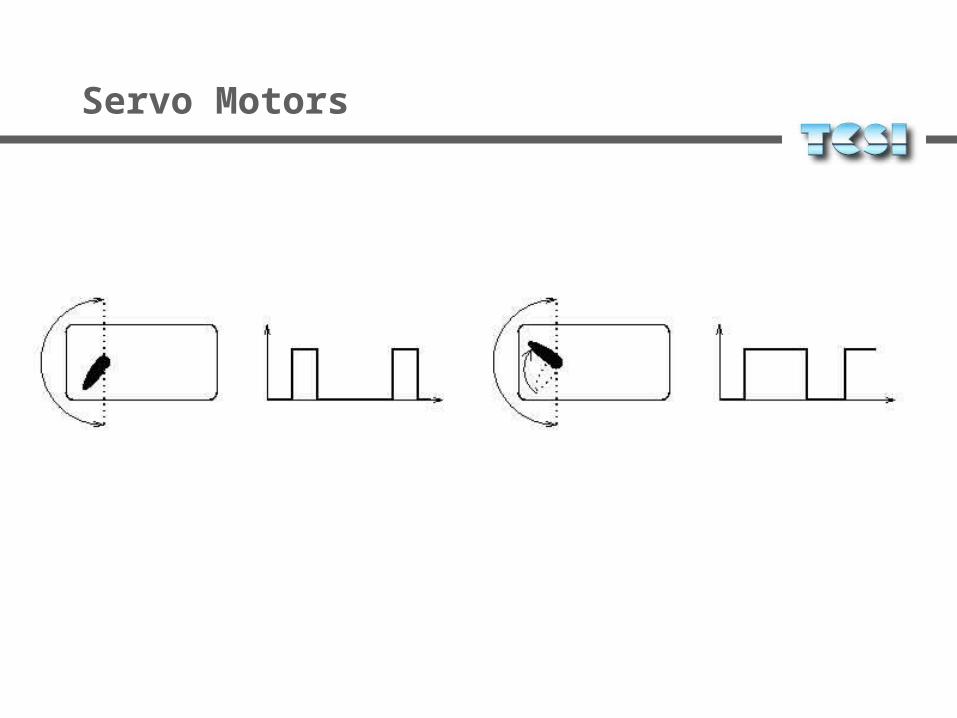
Servo Motors
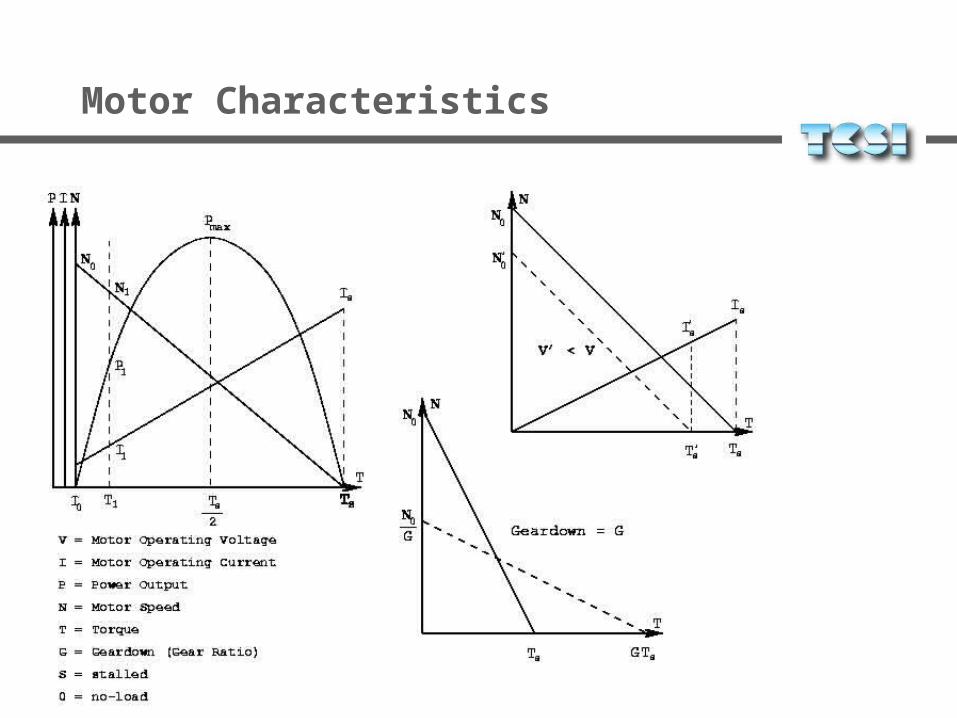
Motor Characteristics
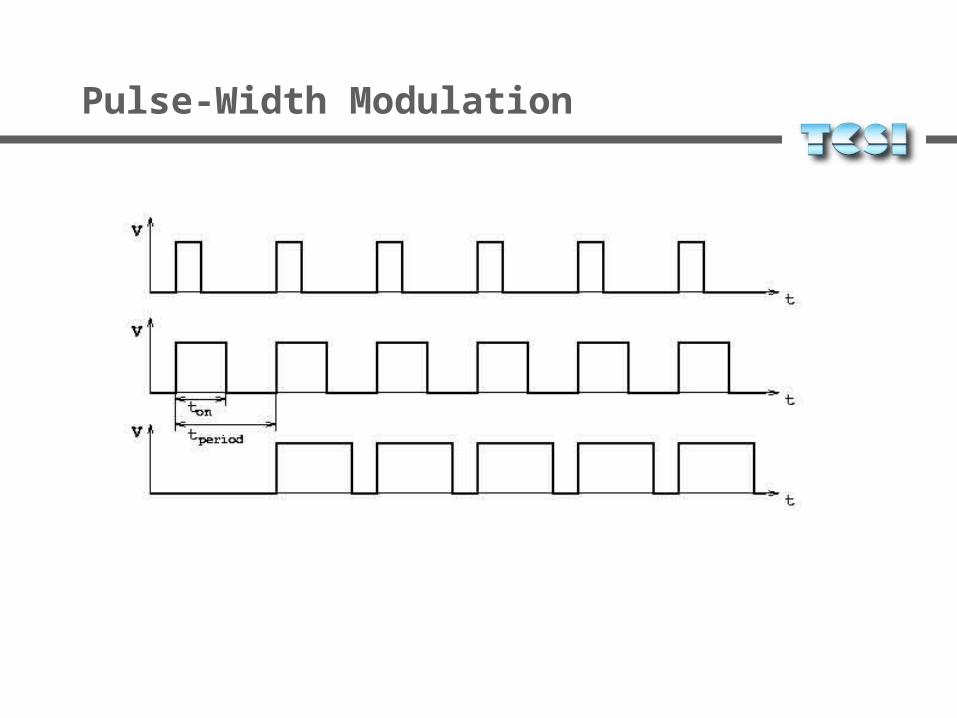
Pulse-Width Modulation
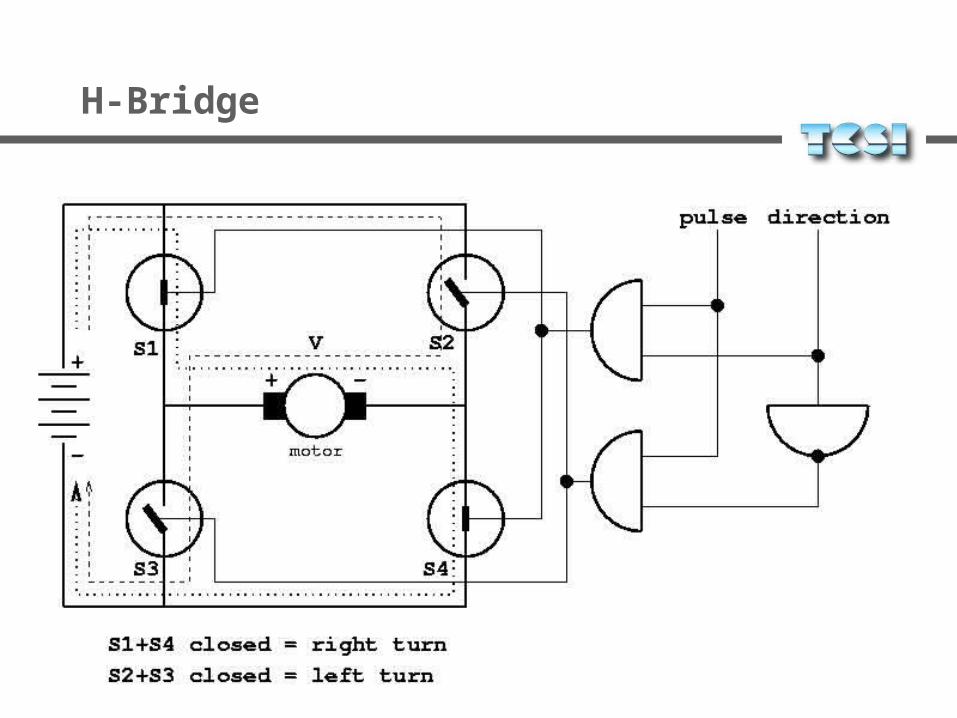
H-Bridge
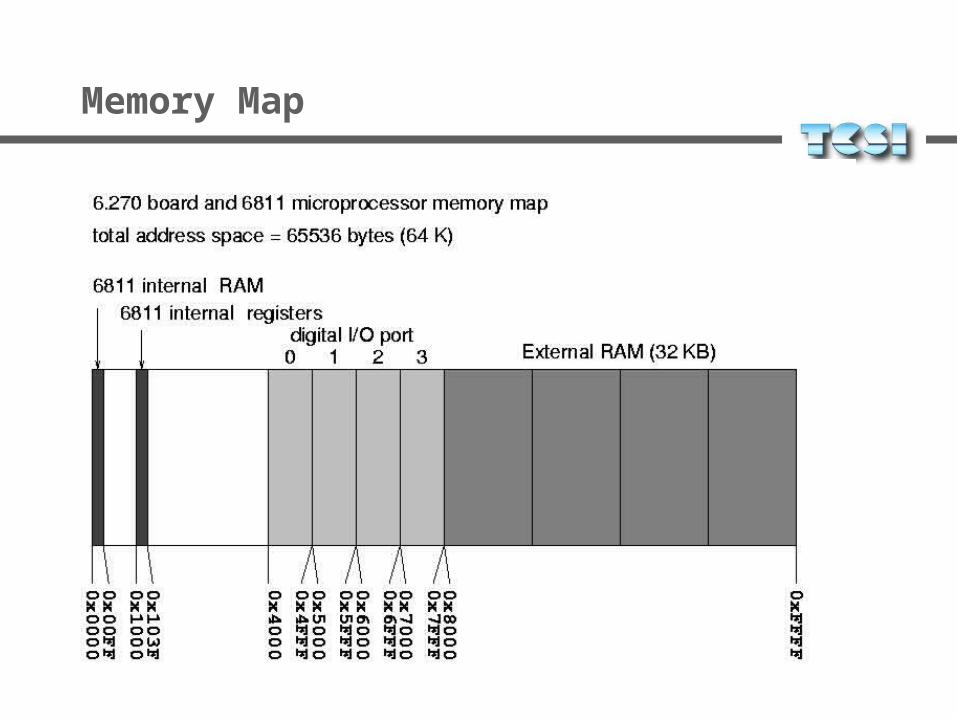
Memory Map
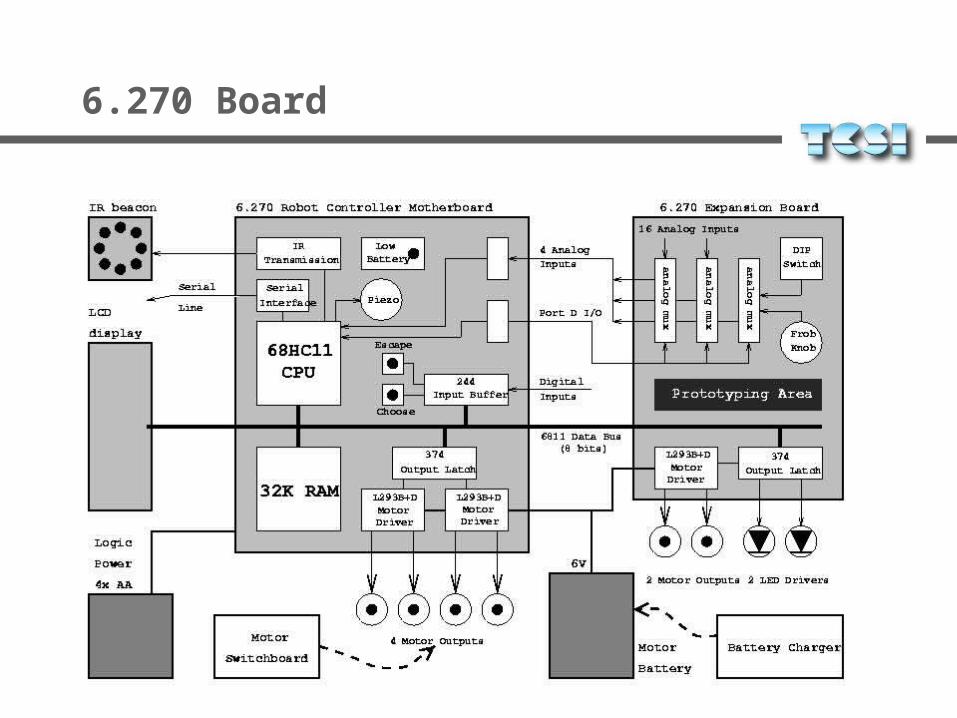
6.270 Board
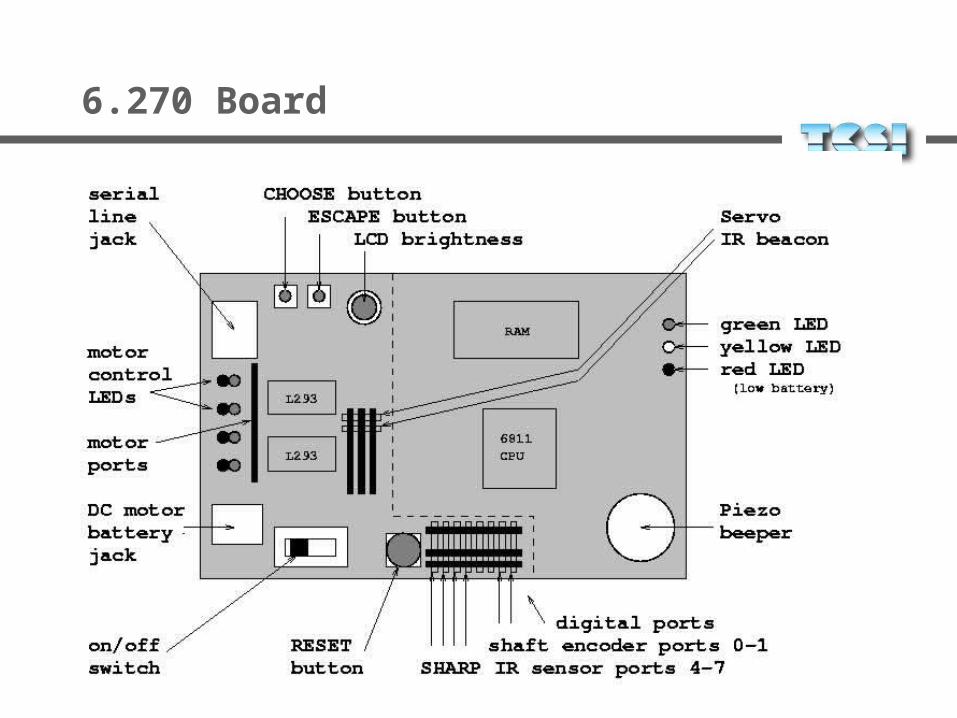
6.270 Board
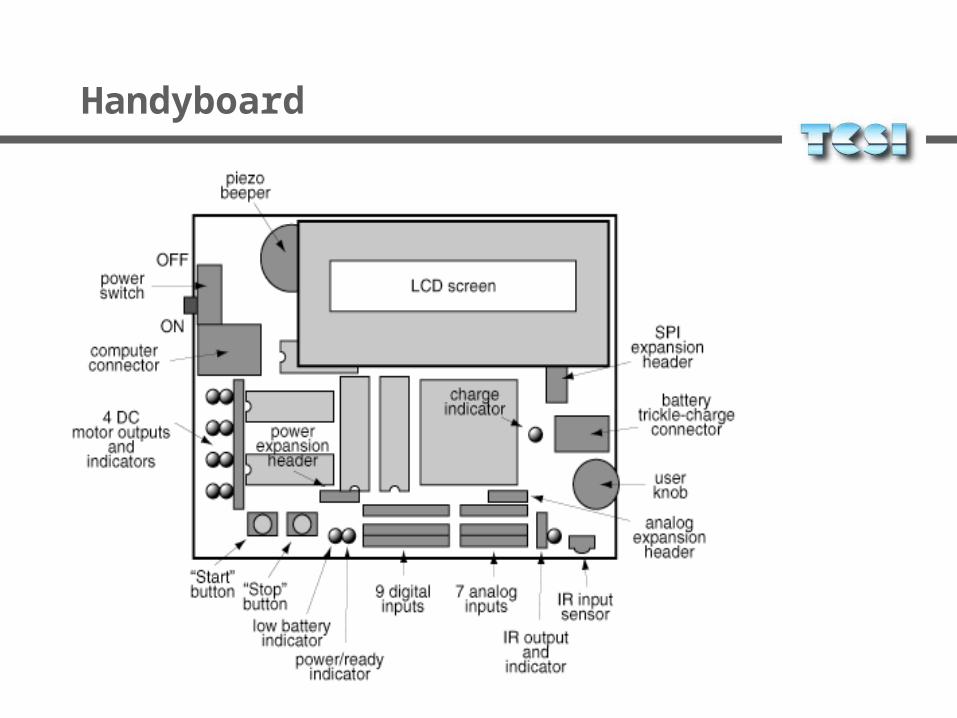
Handyboard
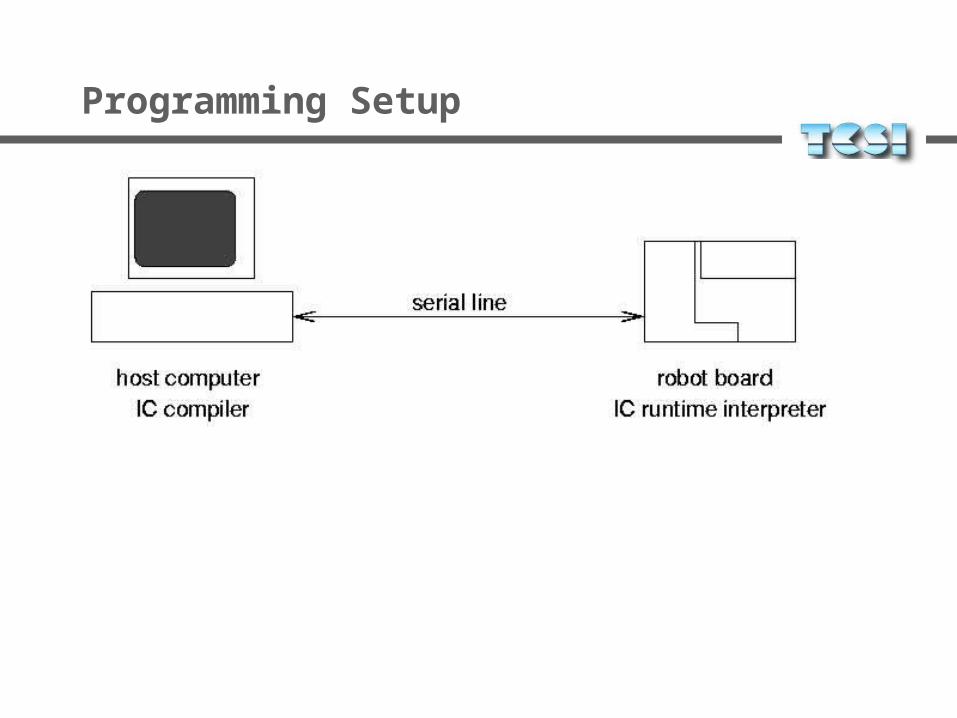
Programming Setup
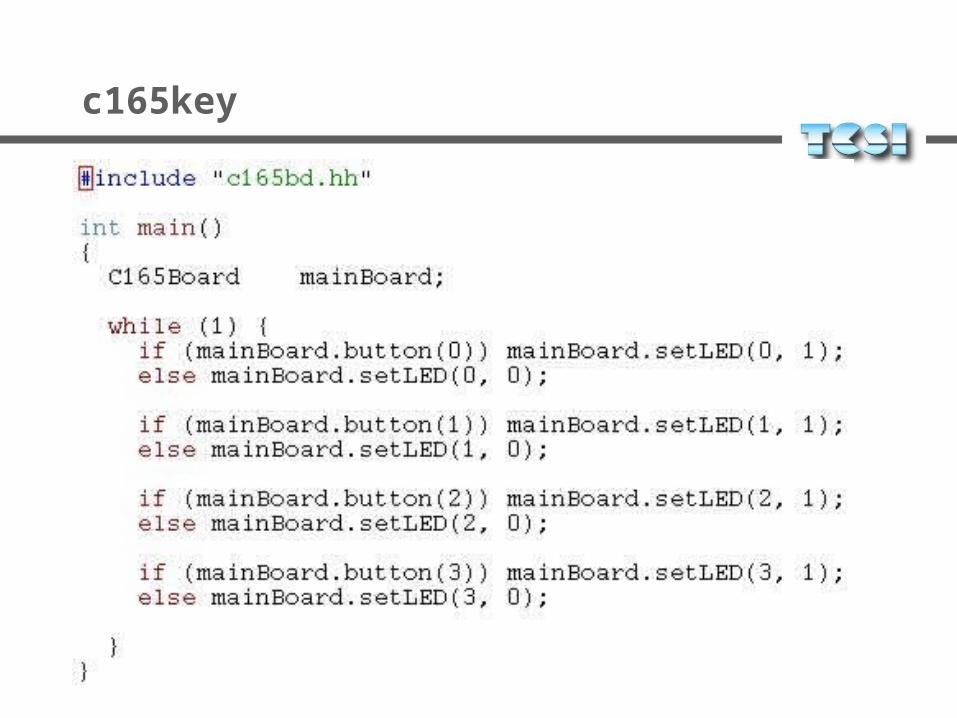
c165key
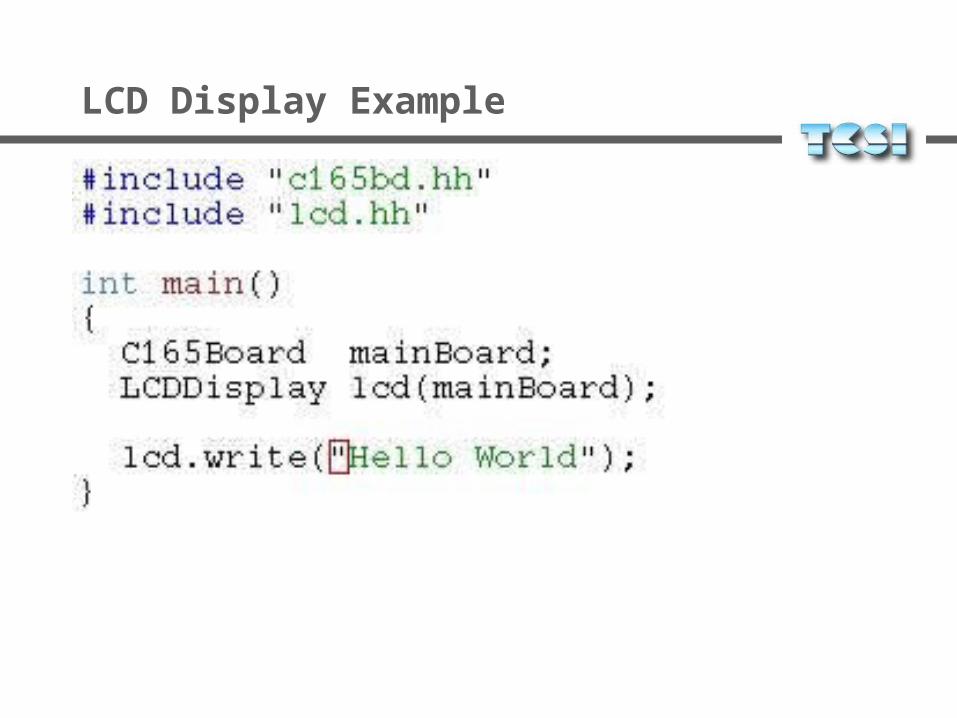
LCD Display Example
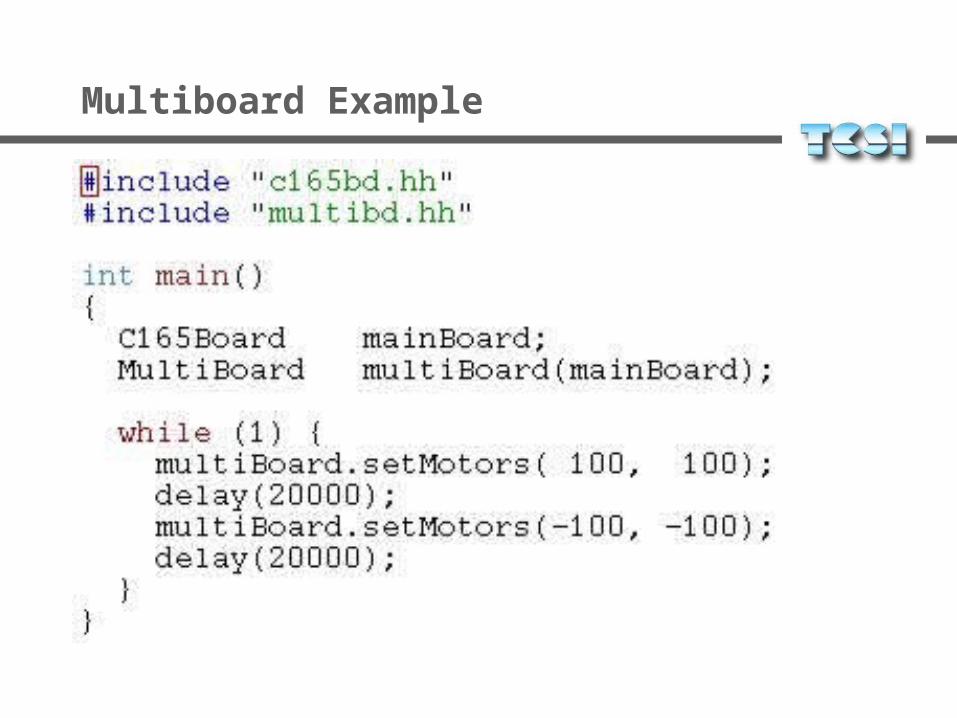
Multiboard Example
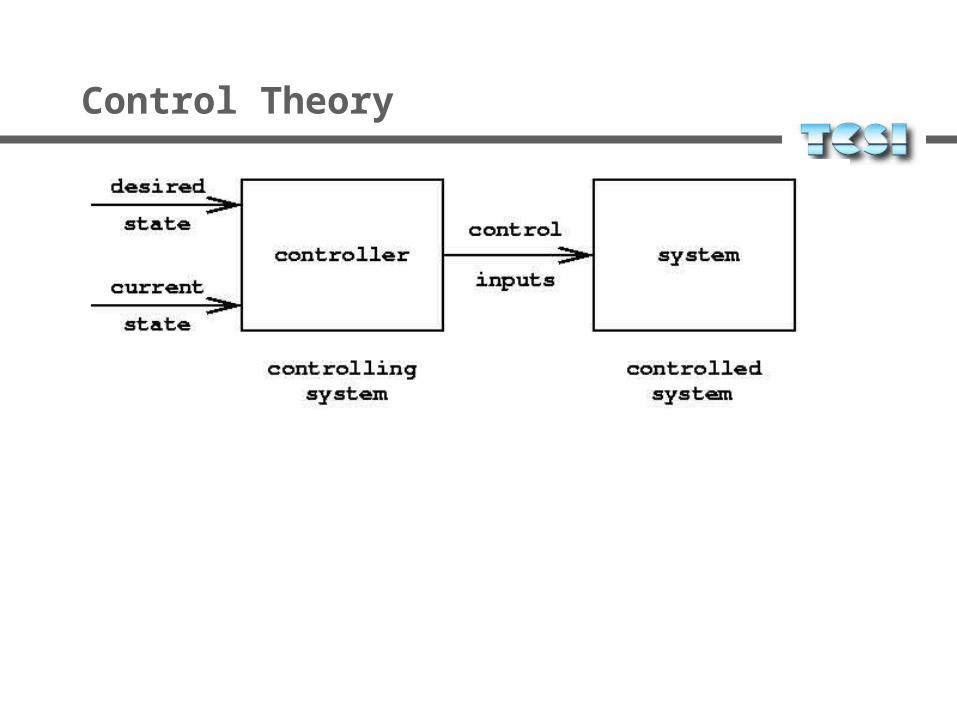
Control Theory
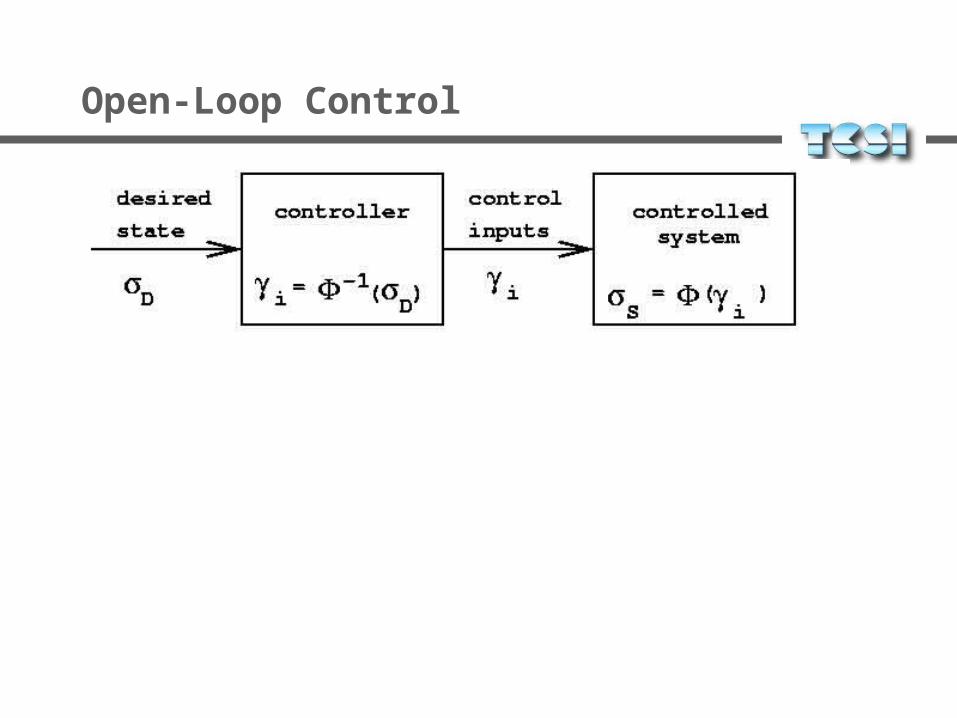
Open-Loop Control
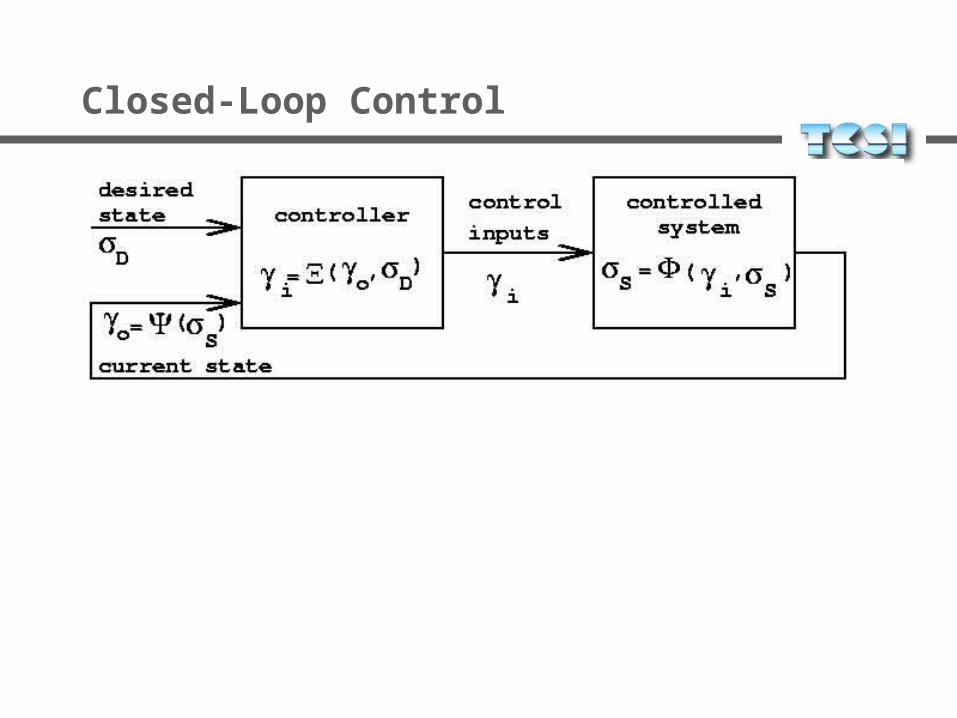
Closed-Loop Control
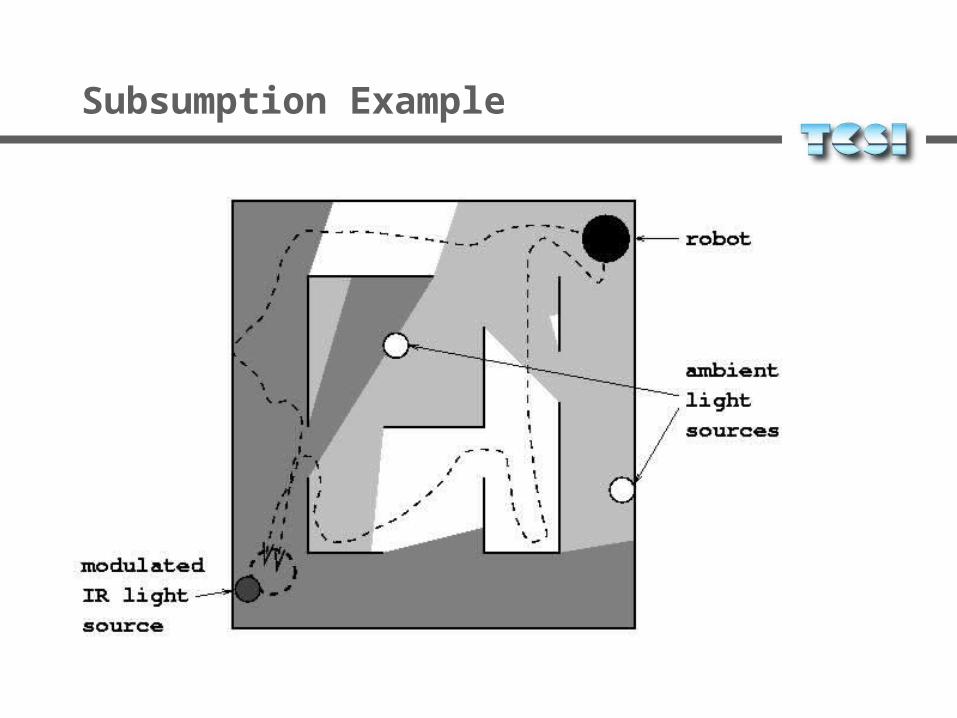
Subsumption Example
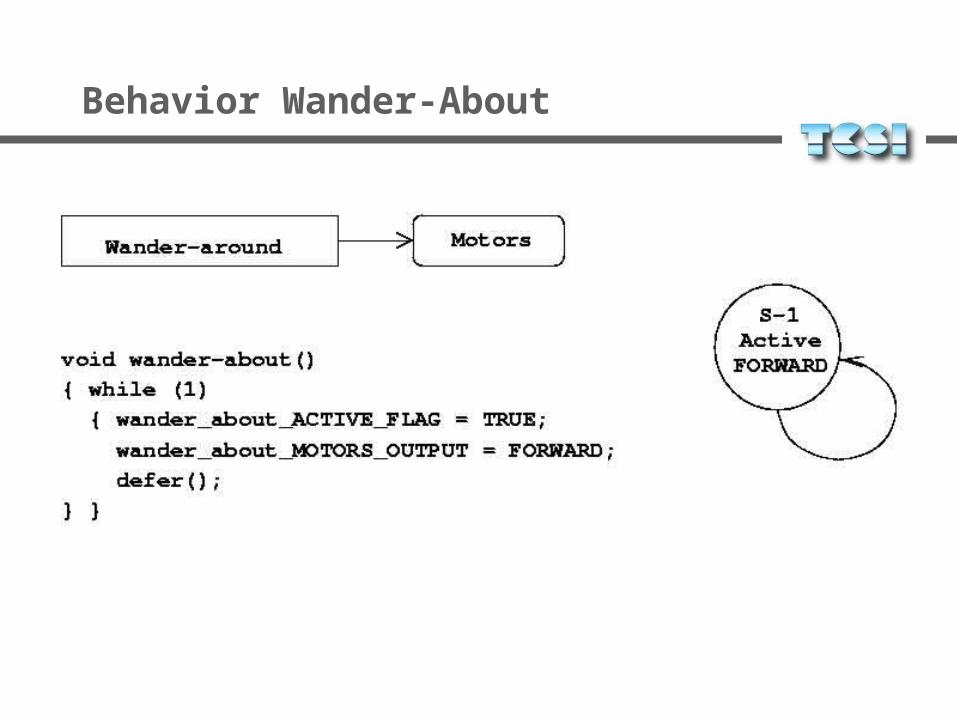
Behavior Wander-About
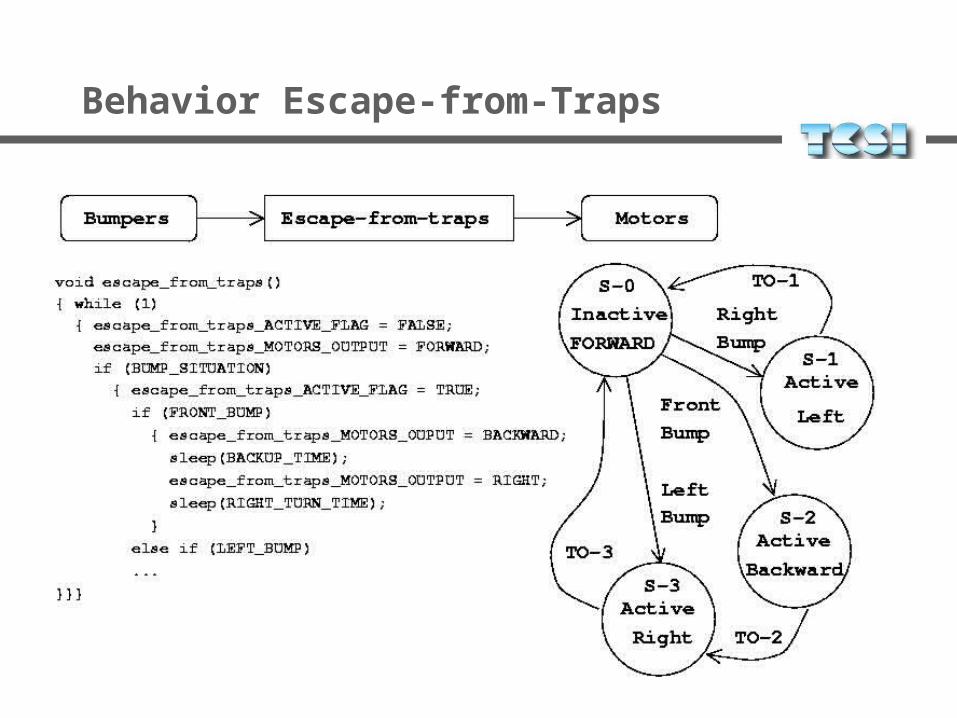
Behavior Escape-from-Traps
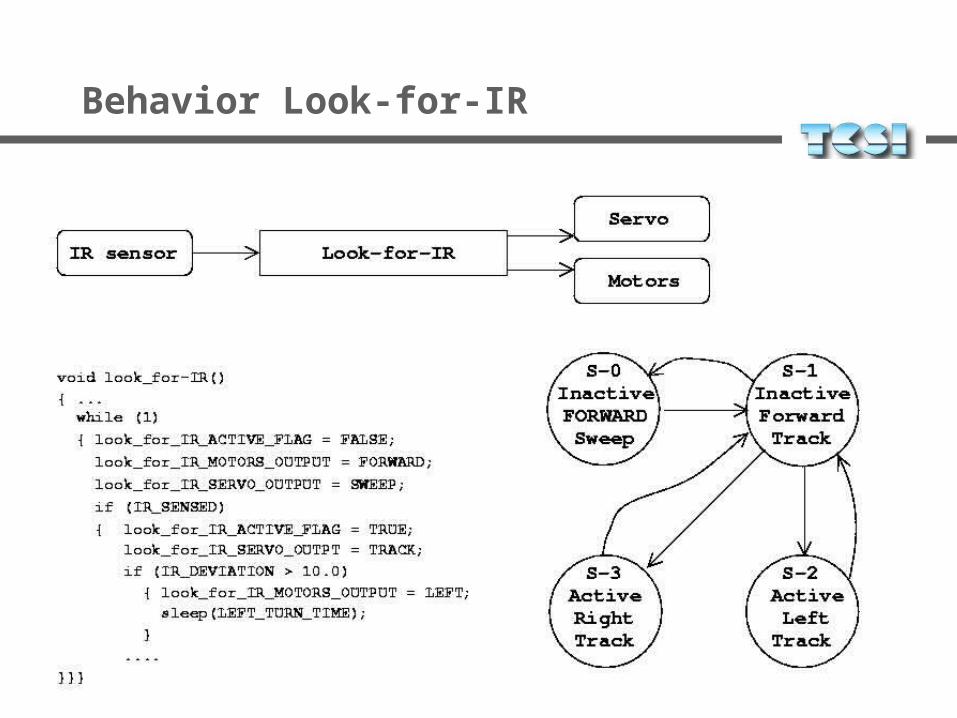
Behavior Look-for-IR
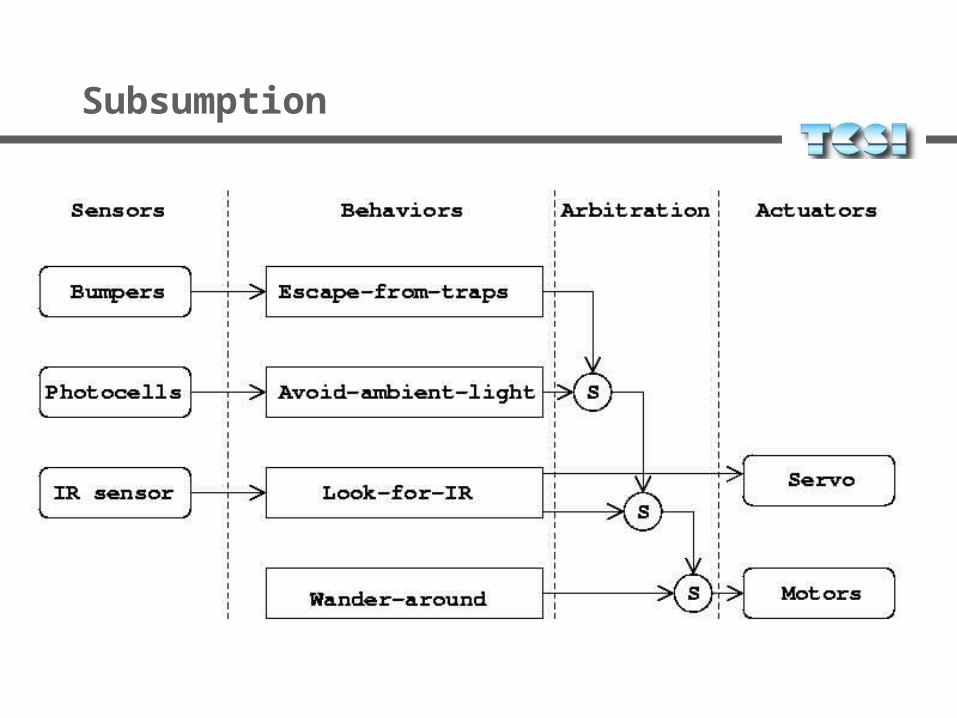
Subsumption
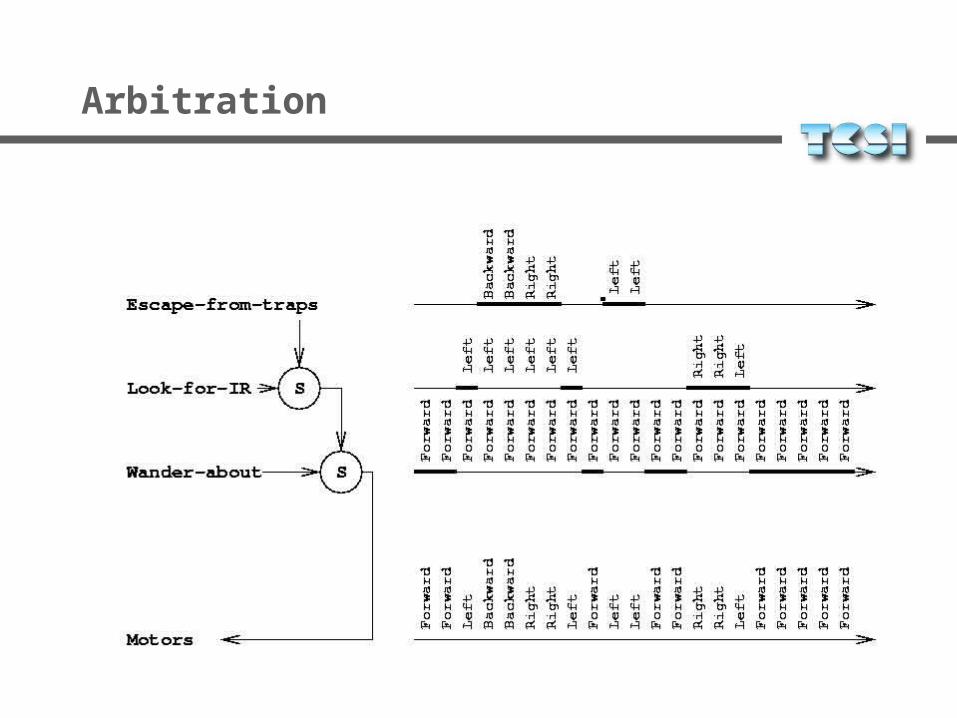
Arbitration
Discussion of Tutorial
• Concepts• Technology• Course Material