-
GE Industrial Systems
Pre-emptive Multi-tasking
Control
g
Innovation Series Controller Product Catalog
-
ContentsCommitment to Quality
.....................................................................................................................................................
1
Six Sigma
Dependability..................................................................................................................................................
1ISO 9001 Certification
.....................................................................................................................................................
1Technical Support
............................................................................................................................................................
1Training............................................................................................................................................................................
1
Overview.............................................................................................................................................................................
2Primary Controller
...........................................................................................................................................................
2Series 90-70 PLC Interface
Module..............................................................................................................................
3Mill Stand Control
Application........................................................................................................................................
4
Innovation Series Controllers
...........................................................................................................................................
5Common Features VME
Controllers.............................................................................................................................
5Differentiating Features VME Controllers
....................................................................................................................
7Common Features ACL
Controllers..............................................................................................................................
9Differentiating Features ACL Controllers
...................................................................................................................
10
Execution of Control Logic
.............................................................................................................................................
11
I/O
Drivers........................................................................................................................................................................
14
Control System Toolbox
..................................................................................................................................................
25Configuration of I/O Drivers and
Hardware...................................................................................................................
26Organization of Control Logic
.......................................................................................................................................
27Instruction Blocks
..........................................................................................................................................................
29
Permissive Diagnostic Function
......................................................................................................................................
32Fault
Detection...............................................................................................................................................................
33Presenting the Diagnosis
................................................................................................................................................
35
Ordering
Information......................................................................................................................................................
36Innovation Series
Controllers.........................................................................................................................................
36Innovation Series Controller I/O
....................................................................................................................................
36Genius I/O System Blocks and Options
.........................................................................................................................
37Field Control I/O System Components and Options
......................................................................................................
38Control System Solutions (Windows NT Applications &
Service)................................................................................
39Catalog Number
Structure..............................................................................................................................................
40
-
CIMPLICITY, Genius, and Series 90 are registered trademarks of
GE Fanuc Automation North America, Inc.Ethernet is a trademark of
Xerox Corporation.Field Control is a trademark of GE Fanuc
Automation North America, Inc.IBM and PC are registered trademarks
of Internation Business Machines Corporation.Innovation Series and
ISBus are trademarks of General Electric Company, USA.Windows is a
registered trademark of Microsoft Corporation.
-
GEP-9145 Innovation Series Controller Product Catalog 1
GE Industrial Control Systems is committed to improve customer
productivity withthe best industrial automation technology,
reliability, and service worldwide.
Six Sigma DependabilityGE businesses are committed to attaining
a Six Sigma level of quality. This programhas been initiated to
identify quality issues and to address these in such a way that
allour business and manufacturing processes are performed correctly
99.99966% of thetime. There are only a few firms in the world,
including hospitals and airlines thathave attained Six Sigma
quality, and GE has made a commitment, backed by trainingand
resources to join this select group.
ISO 9001 CertificationGE Industrial Control Systems quality
processes and software development haveearned the ISO 9001
certification in accordance with TickIT from Lloydss Registerof
London. This certification is the most comprehensive of all
standards developedby the International Organization for
Standardization. It promotes consistent qualityof design and
manufacturing processes world-wide.
Technical SupportGE provides responsive service and support at
any time. GEs OnSite SupportSMremote monitoring and diagnostics
system puts you online with a team of experiencedengineers to
answer questions and diagnose problems. They are available 24 hours
aday to support your team. Over 3,000 sales people are now
available to serve youthrough our new DS-750 Distribution Network
"2000" program linking GE IndustrialControl System Solutions
authorized GE distributors to better serve our endcustomers.
TrainingExtensive training tailored to your needs is available
for both operating andmaintenance personnel. Training can be taught
at your site or at the GE TrainingCenter in Salem, Virginia. All
training facilities feature professionally developedcourses taught
by experienced, knowledgeable instructors in
well-equippedclassrooms and laboratories.
Commitment to Quality
-
2 GEP-9145 Innovation Series Controller Product Catalogin
The pre-emptive multi-taskingfeature allows the
scheduledexecution of a high prioritycontrol task to interrupt
theexecution of a low or mediumpriority control task.
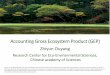
Innovation Series controllers are specifically designed for
application in largeintegrated drive systems and high performance
hydraulic regulators. Each controllerhas a pre-emptive
multi-tasking operating system with revolutionary networking
anddiagnostic features. The Windows-based Control System toolbox
provides uniqueconfiguration and monitoring tools with an
integrated Graphics Window, DataHistorian, and Trend Recorder. Two
controller form factors allow installation in aVersa Module
Eurocard (VME) rack (two forms available) or in an InnovationSeries
drive rack (known as the Application Control Layer (ACL) as
follows:
VME Form Factor ACL Form Factor Primary controller in the system
High speed coordination of drives Interface between sequencing
logic
in programmable logic controller(PLC) and drives in the
system
Mill stand control in the metalsmanufacturing industry
Tension regulation in a coordinatedline
Coil diameter calculation in paperand metal applications
Primary ControllerAs the primary controller in a system, the
Innovation Series controller uses theGenius I/O and/or Field
Control I/O for interface with field devices. I/O driversfor the
Drive LAN+ (DLAN+), Ethernet Global Data (EGD), and ISBus
provideconnectivity to the AC/DC2000 and Innovation Series drives.
Additional I/O driversare available for interfaces with other
components in the system.
Control logic is edited and monitored in a graphic block diagram
format using thetoolbox. The CIMPLICITY Human Machine Interface
(HMI) and the controllercommunicate over Ethernet using Serial
Request Transfer Protocol (SRTP) or EGD.
Ethernet
Genius
CIMPLICITY HMIServer
Control SystemToolbox
Control SystemToolbox
CIMPLICITY HMIViewer
Innovation SeriesControllers
Field Control
DLAN+ISBus
ISBus+-
AC
InnovationSeries
+-
AC
InnovationSeries
+-
AC
InnovationSeries
AC/DC2000AC/DC2000AC/DC2000
Motor Control LayerApplication Control Layer
Innovation Series controllers system configuration in a general
purpose sequencing application
Overview
-
GEP-9145 Innovation Series Controller Product Catalog 3
Series 90-70 PLC Interface ModuleThe Innovation Series
controller can be used to interface the Series 90-70 PLC to
theAC/DC2000 and Innovation Series drives. The AC/DC2000 and
Innovation Seriesdrives have different LAN options for coordination
between drive control and thesequencing software as follows:
Product LAN ConnectivityAC/DC2000 DLAN+
Genius Bus
Innovation Series Drives Ethernet Serial Request Transfer
Protocol (SRTP)Ethernet Global Data (EGD)ISBusGenius Bus
In this type of system, the sequencing logic is implemented in
the Series 90-70 PLCand the Innovation Series controller provides
the interface with the drives. VMEread/write commands initiated
from the Series 90-70 central proccessing unit (CPU)provide the
mechanism for data exchange between the CPU and the
InnovationSeries controller.
Ethernet
CIMPLICITY HMIServer
Control SystemToolbox
CIMPLICITYControl or LM90
CIMPLICITY HMIViewer
Innovation SeriesControllers
DLAN+ISBus
Ethe
rne
t
Ge
niu
s B u
s
ISBus+-
AC
InnovationSeries
+-
AC
InnovationSeries
+-
AC
InnovationSeries
AC/DC2000 AC/DC2000 AC/DC2000
Series 90-70
CPU
CPU
Ethe
rne
t
Ge
niu
s B u
s
Series 90-70
Motor Control LayerApplication Control Layer
Innovation Series controllers system configuration in a VME
PLC-based drive system application
-
4 GEP-9145 Innovation Series Controller Product Catalogin
Mill Stand Control ApplicationIn metal rolling mills, there are
several high performance control functions associatedwith the mill
stand. The Innovation Series controller has several features
specificallytied to this class of applications as follows: Control
block programming language well suited for configuration of
regulators Pre-emptive multi-tasking operating system with task
scheduling (1ms, 2ms,
4ms, 8ms, 16ms, etc) Special purpose I/O modules tailored for
hydraulic cylinder driven regulators Coherent sampling of process
feedback data for inter-related mill stand
regulators Integrated trending package in toolbox for
commissioning and maintenance
Control functions implemented in steel and aluminum mills
include the following:Metal Rolling Mill Hydraulic Cylinder
ControlWork Roll BendingWork Roll ShiftingHydraulic Loopers (hot
strip mill)Eccentricity ControlAutomatic Gauge ControlBackup Roll
BalanceWedge Pass Line AdjustElongation ControlAutomatic Width
Control (hot strip mill)Roll Change Sequencing
Rod & Bar MillWaterbox ControlLaying Head ControlLaying Head
Pinch Roll ControlRoll Change Sequencing
Ethernet
CIMPLICITY HMIServer
Control SystemToolbox
CIMPLICITY HMIViewer
Innovation SeriesControllers
FieldControl
CTR 1CTR 2CTR 3
A/I 1
A/I 8
A/O 1
A/O 4
CTR 1CTR 2CTR 3
A/I 1
A/I 8
A/O 1
A/O 4
CTR 1CTR 2CTR 3
A/I 1
A/I 8
A/O 1
A/O 4
Load CellDLAN+
ISBus
ISBus+-
AC
InnovationSeries
+-
AC
InnovationSeries
+-
AC
InnovationSeries AC/DC2000 AC/DC2000 AC/DC2000
Motor Control LayerApplication Control Layer
Innovation Series controllers system configuration in a mill
stand control application
-
GEP-9145 Innovation Series Controller 5
The VME rack-based controllers share a common processor platform
with differentdrive LAN connectivity options to address a
particular application. The ACLcontrollers are designed to mount in
the Innovation Series drive control rack. Thefollowing section
describes common and differentiating features of these
controllers.
Common Features VME Controllers
Processor Pentium 133 MHz
Memory 16 MB DRAM, 256KB of level 2 cache
Operating System Pre-emptive multi-tasking operating system
built on QNX platform (refer to thesection, Execution of Control
Logic).
LEDs LEDs on the faceplate of the CPU provide status information
as follows:
LED DescriptionActive Microprocessor is activeSlot 1 Controller
configured as the slot 1 controller in VME bus systemBMAS Indicates
VME master access is occurringENET Ethernet packets are being
transmittedBSLV Indicates VME slave access is occurringSTATUS
Display rotating LED pattern when OK -displays flashing error
code
when faultedFLSH Flash memory is being writtenGEN_ Genius I/O is
active
Ethernet Interface Thinwire 10base2, BNC connector TCP/IP
protocol used for communication between controller and toolbox
Serial Request Transfer Protocol (SRTP) interface between
controller and HMI Ethernet Global Data (EGD) protocol used for
communication with Innovation
Series drives, Series 90-70 PLCs, or CIMPLICITY HMI Ethernet
Modbus protocol supported for communication between controller
and Distributed Control System (DCS)COM Ports 9-pin D
connector
COM 1 reserved for diagnostics only
COM 2 can be used for serial protocols, such as Modbus
communicationbetween controller (slave only) and DCS as
follows:
Parameter DescriptionBaud Rate 19200Mode Binary (Remote Terminal
Unit), ASCIIData Bits 7, 8Parity None, Odd, EvenStop Bits 1, 2
Innovation Series Controllers
-
6 GEP-9145 Innovation Series Controller Product Catalogin
Genius Bus Interface
DLAN+ Interface
Programming Language
One or two Genius bus controllers are integrated with the CPU.
For additionalGenius buses, up to five third party VME modules can
be installed in the rack.Each module supports two Genius buses.
Full support of communicationservices on the Genius bus
includes:
Run time communication with Genius I/O blocks and Field Control
I/OSystem for status of inputs and controlling of outputs.
Datagram communication services with Genius I/O blocks and
FieldControl I/O System for upload and download of configuration
data.Local forcing of I/O points is also supported using datagrams
from thecontroller. This allows the user to remotely force I/O
points from thetoolbox.
Global Genius services allow communication (32 or 128 bytes
broadcastfrom each node) between GE Fanuc PLCs and Innovation
Seriescontrollers.
Datagram communication services provide read/write access of
processvariables for GE Fanuc Data Panels and Computer
TechnologyCorporation (CTC) Power Stations.
Full support of DLAN+ communication services includes:
Direct access to all 255 Status_S pages. Each page is 256 words
inlength. Each device on the DLAN+ has a Status_S page partitioned
intocommands and feedback data. The Status_S pages are
periodically(default of 320 ms) broadcast to all other devices on
the network.
Directed and group command messages can be sent to any
devicesStatus_S page with an instruction from user logic.
Each Innovation Series controller can have up to five pages.
Control block language with Boolean logic represented in relay
ladderdiagram format. Supported data types include:
Boolean
16-bit signed integer
32-bit long signed integer
32-bit floating point
64-bit long floating point
Environmental Temperature 0 to 45 Celsius inlet air
operating
-40 to 85 Celsius , storage
Cooling Forced Air, 100 linear feet per minute minimum
Humidity 10 to 95% relative humidity, non-condensing
Shock 6G Max. operating, 10G Max. non-operating
-
GEP-9145 Innovation Series Controller 7
Differentiating Features VME Controllers
VME
Catalog Number DS215UCVBG1 DS215UCVBG3
1 08
1
STATUS
DLAN
+
GENIUS
RSET
EthernetCO
M
21
DLAN+
H L
SER 1SER 2
GENIUS B
1 08
1
DLAN
+
1 08
1
DLAN
+
COM
21
RSET
STATUS
STATUS
Ethernet
DLAN+A DLAN+B
H L H L
SER 1SER 2
SER 1SER 2
GENIUS A
DLAN+ Interfaces
Genius InterfacesISBus InterfacesRequired VME SlotsPower
Requirements
1
1
none
2
+5 V dc 5.64 A
+12 V dc 900 mA
-12 V dc 200 mA
2
2
none
4
+5 V dc 6.08 A
+12 V dc 900 mA
-12 V dc 200 mA
-
8 GEP-9145 Innovation Series Controller Product Catalogin
VME
Catalog Number IS215UCVCH1 IS215UCVCH3 IS215UCVCH5
ISBus B
ISBus A
GENIUS
EthernetCO
M
21
RSET
STATUS
GENIUS GENIUS
COM
21
ISBus A
ISBus B
RSET
STATUS
STATUS
Ethernet
ISBus A
ISBus B
GENIUS
1 08
1
DLAN
+
GENIUS
COM
21
RSET
STATUS
STATUS
Ethernet
ISBus A
ISBus B
DLAN+ Interfaces
Genius InterfacesISBus InterfacesRequired VME SlotsPower
Requirements
none
1
2
2
+5 V dc 5.64 A
+12 V dc 900 mA
-12 V dc 200 mA
none
2
4
4
+5 V dc 6.08 A
+12 V dc 900 mA
-12 V dc 200 mA
1
2
2
4
+5 V dc 6.08 A
+12 V dc 900 mA
-12 V dc 200 mA
-
GEP-9145 Innovation Series Controller 9
Common Features - ACL ControllersProcessor 486 100MHz
Memory 8 MB DRAM128KB of level 2 cache
Operating System Pre-emptive multi-tasking operating system
built on QNX platform (refer to thesection, Execution of Control
Logic).
LEDs LEDs on the faceplate of the CPU provide status information
as follows:
LED Description
ACTIVE Microprocessor is active
ENET Ethernet packets are being transmitted
OK Runtime code is executing
ACTIVE CPU is accessing DRAM
FLSH Flash memory is being written
STATUS Display rotating LED pattern when OK -displays flashing
error code when faulted
Ethernet Interface 10BaseT or AUI connector
TCP/IP protocol used for communication between controller and
toolbox
Serial Request Transfer Protocol (SRTP) interface between
controller and HMI Ethernet Global Data (EGD) protocol used for
communication with Innovation
Series drives, Series 90-70 PLCs, or CIMPLICITY HMI
Ethernet Modbus protocol supported for communication between
controllerand Distributed Control System (DCS)
COM Ports Micro-miniature 9-pin socket D connector
COM 1 reserved for diagnostics only
COM2 Modbus communication between controller (slave only) and
DCSParameter DescriptionBaud Rate 9600, 19200Mode Binary (Remote
Terminal Unit), ASCIIData Bits 7, 8Parity None, Odd, EvenStop Bits
1, 2
Environmental Temperature 0 to 45 Celsius inlet air,
operating
-40 to 85 Celsius, storage
Cooling Forced Air, 100 linear feet per minute minimum
Humidity 10 to 95% relative humidity, non-condensing
Shock 6G Max. operating, 10G Max. non-operating
-
10 GEP-9145 Innovation Series Controller Product Catalogin
Differentiating Features ACL ControllersACLCatalog Number
IS215ACLAH1 IS215ACLAH2 IS215ACLIH1 IS215ACLIH2
Ethernet
STATUS
COM
21
OKACTIVEENETFLASH
RST
STATUS
COM
21
OKACTIVEENETFLASH
RST
Ethernet
Ethernet
STATUS
COM
21
OKACTIVEENETFLASH
RST
ISBus A
ISBus B
STATUS
COM
21OKACTIVEENETFLASH
RST
ISBus A
ISBus B
Ethernet
Ethernet Interface
ISBus Interface
10BaseT
None
AUI
None
10BaseT
2
AUI
2
-
GEP-9145 Innovation Series Controller 11
Large industrial drive systems and mill stand controls require a
wide range ofperformance in execution of control functions. The
following table displays typicalsweep rate requirements for common
control functions.
Function Required Sweep RateSequencing of hydraulic pumps 128
msSequencing of material handling equipment 32 msHydraulic position
regulator for a coil car ina metals process line
16 msec
Work roll bending regulator in a mill stand 8 msEccentricity
control in a mill stand 1 msec
To meet this wide range of sweep rate requirements, the
Innovation Series controllersprovide a pre-emptive multi-tasking
environment for the execution of control logic.Control functions
are organized into tasks, which are scheduled and prioritized
perthe requirements of the mechanical equipment. The following
table displays availablepriorities and rates for a given control
task.
Priority of Control TaskAvailable Sweep Rates (ms) High Medium
Low
1, 2 Yes - -4 Yes Yes -
8, 16 - Yes -32 - Yes Yes
64, 128, 256 - - Yes
The pre-emptive multi-tasking feature allows the scheduled
execution of a highpriority control task to interrupt the execution
of a low or medium priority controltask. Also, a medium priority
control task can interrupt a low priority control task.
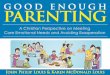
Control task execution is as follows (refer to figure on
following page):1. Copy all of the external inputs referenced in
the task from the I/O Table to the
Software Signal Table.
2. Execute the control logic in the task per the numbered
sequence of blocks.
3. When execution is complete, all external outputs referenced
in the task arecopied from the Software Signal Table to the I/O
Table except:
Configured I/O drivers read andwrite the I/O Table values
tohardware asynchronously with theexecution of control logic
tasks.
Mill Stand VME I/O outputs that are written directly to the I/O
board at thecompletion of high priority tasks.
DLAN+ command messages sent on the network according to the
priority of thetask. All high and medium priority tasks run to
completion before the messageis sent. In low priority tasks, the
message is sent when the block is executed.
Tasks can be dynamically enabled and disabled from the control
logic by connectingthe task enable to a signal and modifying the
online value. When a task is disabled,neither the I/O or user logic
is executed.
Execution of Control Logic
-
12 GEP-9145 Innovation Series Controller Product Catalogin
CPUBasedGenius
Limit_Switch
Solenoid
Start_PB
DLAN+
E-NetSRTP &Genius
Datagram
E-NetGlobalData
ISBus
ModbusRTU
AllenBradley
DH+
ModbusE-Net
VME BusRead/Write
VMEBoardBasedGenius
Mill StandVME I/O
CTR 1CTR 2CTR 3
A/I 1
A/I 8
A/O 1
A/O 4
I/OTable
I/ODrivers
SoftwareSignalTableInputs at
start of task
Outputs atend of task
GE Fanuc PLC
VMEInterfaceSysTran
Scram Net
Stop_PB
Start_PB Solenoid
Solenoid
Stop_PB
Limit_Switch
Read Task Inputs into SoftwareSignal Table
Write Task Outputs into I/OTable
Sequencing Tasks(Low Priority)
Read Task Inputs into SoftwareSignal Table
Write Task Outputs into I/OTable
Low PerformanceRegulators Tasks(Medium Priority)
Read Task Inputs into SoftwareSignal Table
Write Task Outputs Directly toStand Controller I/O Board
High PerformanceRegulators Tasks
(High Priority)
Cylinder_Position
Cylinder_Reference
Cylinder_Position
Cylinder_Reference
Start_PBStop_PBSolenoid
Limit_Switch
Cylinder_Position
Signal Flow / Control Logic Task Execution
-
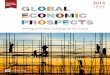
GEP-9145 Innovation Series Controller 13
In the following example, consider a skin pass mill in steel
galvanizing process linewith the control functions listed:
Control Functions Required ControlSweep Rate (ms)
TaskPriority
Task SweepRate
Hydraulic gap control (HGC) 2 High 2Work roll bending regulators
4 Medium 4Mill sequencer 64 Low 64Elongation control 64 Low 64
The following figure shows the execution of control tasks. High
priority tasks, suchas HGC are run before medium and low priority
tasks. The HGC task is run in eachtwo-millisecond time slice. The
remaining time in that time slice executes lowerpriority tasks.
0 2 msec 4 msec 6 msec 8 msec
HGCTask
Work RollBending
Task
Portion of MillSequencer
TaskHGCTask
Remainder ofMill
SequencerTask
IdleTime
HGCTask
Work RollBending
Task
IdleTime
HGCTask
IdleTime
ElongationControlTask
Time line for control logic execution
-
14 GEP-9145 Innovation Series Controller Product Catalogin
I/O drivers interface the Innovation Series controllers with
sensors, actuators, andother components in the system. They
generally operate asynchronously with controltasks, periodically
writing inputs to the I/O table and reading outputs.
I/ODriver
I/OTable
I/ODrivers
SoftwareSignalTable
Inputs at start of task, scaledeach time
Outputs at end of task, scaledeach time
Start_PBStop_PBSolenoid
Limit_Switch
Operation of I/O drivers
All input points referenced in a control logic task are read
from the I/O Table, scaled,and written to the Software Signal Table
at the beginning of that task. All outputpoints referenced in a
control logic task are read from the Software Signal Table,scaled,
and written to the I/O Table at the completion of the task.
Genius I/O DriverGenius
I/O
Genius BusThis bus can have up to 32devices such as, Genius
I/Oblocks, Field Control I/O BusInterface Units (BIU),controllers,
and a hand heldmonitor.
Both the Genius I/O system and Field Control I/O system use the
Genius bus forcommunication. The Genius bus has features well
suited for industrial I/Oapplications including: High noise
immunity (1500 volt isolation to ground) Wide range of baud rates
for different lengths and cable plants Protocol specifically
designed for I/O, configuration, and diagnostic data
Genius I/O BlocksThe Genius I/O blocks are a well-proven I/O
system with unmatched diagnosticfeatures as follows:
Discrete I/O Blocks Analog I/O BlocksOpen-wire detection
(inputs) Open-wire detection (inputs)Sense shorted wire (inputs)
High alarm (inputs)Failed switch (inputs/outputs) Low alarm
(inputs)Over temperature (inputs/outputs) Internal fault
(inputs)Loss I/O power (inputs/outputs) Wiring error
(inputs)Short-circuit (outputs) Input short (inputs)Load state
feedback (outputs) Under-range (input/outputs)Pulse Test (outputs)
Over-range (inputs/ouputs)No-load (outputs) Feedback error
(output)Overload (outputs)
I/O Drivers
-
GEP-9145 Innovation Series Controller 15
The diagnostic information related to a Genius I/O point can be
referenced in controllogic with two additional signals. These
signals are automatically defined for eachpoint as follows:
Genius I/O Point Signals Data Type DescriptionSignal_Name
Boolean or
IntegerValue of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 I/O point fault codeByte 2 Block fault codeByte 3
Block presentByte 4 Controller OK
These diagnostic signals can be used in control logic to
intelligently react toelectrical/mechanical faults in a split
second and annunciate the fault in the HMI.
Blocks can be monitored or configured from the Genius bus hand
held monitor or thetoolbox.
Function Hand HeldMonitor
Toolbox
Configure block Yes YesMonitor block Yes YesForce I/O at the
block level Yes YesForce list of I/O points No YesReset faults Yes
YesSet node number Yes No
Field Control I/O SystemField Control I/O provides a cost
effective I/O system on the Genius bus withlimited diagnostics
relative to the Genius blocks. Each I/O station contains aBIU,
field terminal bases, and field I/O modules. Several terminal block
optionsare designed to eliminate auxiliary terminal blocks.
DIN-rail is an internationalstandard for I/O connectors.
The BIU interfaces the I/O station to the Genius bus. The
universal field terminalbases are DIN-rail (Deutsche Industrie
Norm) mounted in the I/O enclosure andcan accept two I/O modules.
Up to eight field terminal bases can be mounted in agiven I/O
station.
Field ControlI/O Point Signals
Data Type Description
Signal_Name Boolean orInteger
Value of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 I/O point fault codeByte 2 Block fault codeByte 3
Block presentByte 4 Controller OK, bit 0 Module fault code, bits
4-7
-
16 GEP-9145 Innovation Series Controller Product Catalogin
VME High Speed RegulatorI/O Driver CTR 1
CTR 2CTR 3
A/I 1
A/I 8
A/O 1
A/O 4
HighSpeed
RegulatorI/O
VME Bus
ResolverI/O
Module
FarrandInductosyn
IncrementalEncoders
A VME rack-based I/O module is available to provide the I/O
requirements of highperformance regulators. The inputs tied to each
VME high-speed regulator I/Omodule are read into the I/O table once
per millisecond, allowing synchronization ofinputs across several
inter-related regulators. The outputs are written directly to
themodule at the completion of the control logic task. Features of
the VME I/O driverare as follows:
Physical Mounting
DIN-rail is an internationalstandard for I/O connectors
The universal I/O board, SIOB, occupies one VME slot using the
P1 connector.Module faceplate connectors, J1 and J2, attach through
cabling to a terminal base.Field wiring connections on the terminal
base are DIN-rail (Deutsche IndustrieNorm) mounted.Three High-Speed
CountersEach counter has a marker pulse input that can also be
configured for low speed orhigh speed operation. The marker can be
optionally enabled/disabled from asoftware jumper. Each 16-bit
counter operates in one of the following modes basedon jumper
settings:Low Speed (100 KHz) Isolated Differential - Optically
isolated differential input at+/- 5V or +/-15V differential.
Maximum of 100 KHz in the A quad B or up/downmode.
When using high speed, useBeldon 813X cable (X isnumber of cable
pairs), for nolonger than 37m (120 ft).
High Speed (4/2.5 MHz) Differential Differential input at +/-5 V
or +/-15 V.Maximum frequency of 2.5 MHz in the A quad B mode or 4
MHz in the up/downmode.
3-pulse Tachometer Alarm InputsEach of the 3-pulse counter input
circuits has a corresponding discrete alarm inputcircuit. This
input is commonly used with the Sony Magnescale MSD-560N product,to
alert the control system that there is a problem with the
sensor.
Eight Analog Inputs
Each analog input can be configured to one of the following
ranges:
0 to 20mA
-10 to +10mA
0 to 10V
-10 to +10V
-5 to +5V
-
GEP-9145 Innovation Series Controller 17
A voltage-controlled oscillator (VCO) technology is used for
these circuits that yielda variable resolution based on:
Sweep rate of the control logic task using the referenced
point
Range selected for the point
For ranges 0 to 10V and -5 to +5V:Resolution = 10 /
[(2*106)*(Scan Rate of Control Task)] (V/Cnt)
For 10 to +10V:Resolution = 20 / [(2*106)*(Scan Rate of Control
Task)] (V/Cnt)
For ranges 0 to 20mA and -10 to +10mA:Resolution = 10 /
[(109)*(Scan Rate of Control Task)] (A/Cnt)
3-Pulse Tach Alarm OutputsEach of the 3-pulse counter input
circuits has a corresponding discrete alarm resetoutput circuit.
This output is commonly used with the Sony Magnescale
MSD-560Nproduct, to reset an alarm tied to a fault condition.
Three Analog Outputs (buffered)Each of the buffered analog
outputs can operate in one of the following modes:
10 to +10V
20 to +20mA
60 to +60mA
Each of the outputs is capable of driving up to 60mA at +/-10V.
This allows theoutput to directly (without amplifier) control two
stage servo valves.16-bit analog to digital converter with 13-bits
of monotonicity and 12-bits ofaccuracy
Dither on each output is software configurable to allow
20/15.4/12.5/10.5% peak topeak of full scale at 400 Hz. (This is
used with servo valves to prevent sticking.)One Analog
OutputOperates at 10 to +10 V at 5 ma.
16-bit analog to digital converter with 13-bits of monotonicity
and 12-bits ofaccuracy.
Power Requirements
Nominal P5 = 2 A
With 3 Analog Outputs at 60 mA, power required = 2.6 A
VMEI/O Point Signals Data Type DescriptionSignal_Name Boolean
or
IntegerValue of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 board health and presentByte 2 stall status; set
true if not stalled
-
18 GEP-9145 Innovation Series Controller Product Catalogin
DLAN+ I/O DriverDLAN+
Innovation SeriesController
AC/DC2000
The Attached Resourcecomputer NETwork is a LANcommunications
protocol thatserves as the basis forDLAN+.
The Drive Local Area Network (DLAN+) is a control network for
the InnovationSeries controllers (VME) and AC/DC2000 drives. The
DLAN+ supports up to 255devices, using a token-pass, peer-to-peer
communication protocol. When a devicehas the token, it can send a
directed, group, or broadcast message.
Each device on the network has a page of memory that contains
feedback andcommand data. The addresses of the points on the pages
are made known to otherdevices through the System Database
(SDB).Each page in the system is broadcast every 320 milliseconds
to all devices. This isthe default time and can be modified. To
save bandwidth, only the variables of apage that have changed are
broadcast. To ensure that devices coming online areproperly
initialized, the entire feedback page is broadcast every five
seconds.
The Innovation Series controller maintains a copy of all pages
in memory. Thus, itcan reference any feedback or command signal
from any page. The diagnosticinformation related to a page is
carried into the control logic in two additional signalsthat are
automatically defined for each point:
DLAN+I/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer, or RealValue of signal
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 long (only 2 bytesused)
Byte 1 page healthByte 2 point health
These diagnostic signals can be used in control logic to
intelligently react toelectrical/mechanical faults in a split
second and annunciate the fault in the HumanMachine Interface (HMI)
system.Blocks and alarms/diagnostics are available in control logic
to send commandmessages to one or a group of devices. These
messages are sent out on the DLAN+immediately after execution of
the instruction, provided the instruction is not in a lowpriority
task.
-
GEP-9145 Innovation Series Controller 19
Serial ModbusTM I/O DriverModbusProtocol
DCS / HMISystem
Com 1/2
This protocol is a master/slave scheme, where the master device
(typically DCS orHMI system) initiates all transactions (read or
write). The Innovation Seriescontroller is always the follower,
responding to requests from the master.
Error checking is done at both the byte (optional) and message
level. Parity check isdone on each byte and either a Cyclical
Redundancy Check (CRC) or LongitudinalRedundancy Check (LRC) check
sum is appended to each transmission based on themode.
There are two transmission modes:
ASCII Mode - Each 8-bit byte in the message is sent as two ASCII
characters.This allows time intervals of up to one second to occur
between characters withoutcausing an error. Each transmission has
an LRC check sum appended to themessage.
Remote Terminal Unit (RTU) Mode - Each 8-bit byte in the message
is sent astwo 4-bit hexadecimal characters. This mode packs the
data more efficiently than theASCII mode, providing better
throughput at the same baud rate. Each message mustbe sent as a
continuous stream in this mode. Each transmission has a CRC check
sumappended to the message.
Serial ModbusI/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer, or RealValue of signal
Point Health#Signal_Name
N/A (set to always health)
Point Health Detail##Signal_Name
N/A
-
20 GEP-9145 Innovation Series Controller Product Catalogin
Ethernet Modbus I/O Driver ModbusApplication
Protocol
DCS / HMISystem
Ethernet
The Ethernet Modbus is a multi-layer protocol, providing
peer-to-peercommunication between controllers and other intelligent
components in the system.The Innovation Series controllers support
the Data Access (register read/write) classof services.
A transaction consists of a request-response message pair. The
request has a functioncode that defines its mission. The response
contains the data in a read or anacknowledge in a write operation.
The layers of Modbus application protocol usedare:
Application layer is the Modbus Application Protocol (MBAP).
Transport layer (TCP) provides a reliable flow of data between two
applications
TCP/UDP system.
Network layer handles routing of packets around the network.
Link layer handles communication to a specific network.
Physical layer is 10base T.
Ethernet ModbusI/O Point Signals Data Type
DescriptionSignal_Name Boolean,
Integer, or RealValue of signal
Poin Health#Signal_Name
N/A
Point Health Detail##Signal_Name
N/A
-
GEP-9145 Innovation Series Controller 21
Ethernet Serial RequestTransfer Protocol (SRTP)& Genius
Datagram I/ODriver
E-Net SRTP& GeniusDatagram
%Rxx
%MxxEthernet
Genius Bus
CIMPLICITY HMI
The Ethernet SRTP and Genius Datagram I/O drivers share a common
I/O page ofmemory designed to mimic the Series 90 PLC register
(%Rxx) and internal Boolean(%Mxx) areas of memory. This is used to
tie variables to some external host. Twoexamples are:
CIMPLICITY HMI system using the Ethernet SRTP protocol
GE Fanuc Data Panel 1060 using Genius datagrams
The Innovation Series controllers implementation of the SRTP
protocol supportsreading and writing of Boolean, 16-bit integers,
and 32-bit real variables. Thesupport of Genius datagram services
is similar, with support of reading and writing ofBoolean, 16-bit
integers, and 32-bit real variables
SRTPI/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer, or RealValue of signal
Point Health#Signal_Name
N/A
Point Health Detail##Signal_Name
N/A
-
22 GEP-9145 Innovation Series Controller Product Catalogin
Ethernet Global Data(EGD) I/O Driver
+-
AC+-
AC
E-Ne
t
EthernetGobalData
(EGD)
90-7
0 CP
U
Ethernet
Innovation SeriesController
CIMPLICITY HMI
+-
AC
InnovationSeries
Most industrial control systems need to repeatedly send out a
set of process variablesto other components in the system. This
sharply contrasts with the connection-oriented model that is
associated with most Ethernet TCP/IP protocols. Using theEGD
protocol, a data producer sends the data once and all data
consumers receive itsimultaneously. This greatly reduces the
network and device processing overheadtied to the exchange of
control data.
EGD uses a low level protocol (UDP/IP), which requires less
overhead than fullyacknowledged stream oriented protocols. This
type of protocol is very useful in thefollowing classes of
applications:
Exchange of interlocks between PLCs and Innovation Series
controllers in alarge system.
HMI systems that need periodic updates of selected variables to
animate processmimic screens.
Data collection processes that require periodic updates of
certain processvariables.
EGD protocol is currently supported in the following control
system products:
Series 90-70 PLCs
Innovation Series controllers
Innovation Series drives
CIMPLICITY HMI System
Mark VI Turbine Control System
A Windows NT Host Communication Toolkit is available from GE
Fanuc for theintegrator that would like to establish EGD
connectivity.
EGDI/O Point Signals Data Type DescriptionSignal_Name Boolean
or
IntegerValue of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 page healthByte 2 point health
-
GEP-9145 Innovation Series Controller 23
SCRAMNet I/O Driver
SysT
ran
SysT
ran
SCRAMNet
90-7
0 CP
U
SCRAMNet
Innovation SeriesController
The SCRAMNet Network (Shared Common RAM Network) was developed
bySYSTRAN to satisfy the demanding real-time requirements of
aircraft simulators.The LAN utilizes a 150 Mb fiber optic ring
topology communication scheme toachieve speed and noise immunity.
The network memory appears in the addressspace of each node in the
system.
GE has taken this raw memory transfer scheme and added a layer
that provides globalmemory allocation rules for each node, and node
and variable health status rules.This layer is fully documented in
the system manual for third-party interface.
SCRAMNetI/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer or RealValue of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 page healthByte 2 point health
Allen-Bradley DataHighwayTM Plus (DH+) I/ODriver
AllenBradley
DH+
AB P
LC
Data Highway Plus Data LinkDL 200
Com 1/2
The Allen-Bradley DH+ is used for remote programming of A-B PLCs
and sharingdata between different devices in the control system. It
is a token passing protocolthat operates at 57.6 KB. Using the
Datalink DL2000, the Innovation Seriescontroller can share data
with other devices on the network.
DH+I/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer, or RealValue of signal
Point Health#Signal_Name
N/A
Point Health Detail##Signal_Name
N/A
-
24 GEP-9145 Innovation Series Controller Product Catalogin
Series 90-70 PLC VMEInterface I/O Driver
90-70PLCVME
VME Bus
CPU
Series 90-70
The Series 90-70 PLC VME I/O driver exchanges control data
between theInnovation Series controller and 90-70 CPU using the VME
bus on the backplane.Boolean, 16-bit integers, and 32-bit real
variables are supported data types. Full datacoherency is
guaranteed.
Series 90-70 PLC VMEI/O Point Signals
Data Type Description
Signal_Name Boolean orInteger
Value of I/O point
Point Health#Signal_Name
Boolean Indicates point health
Point Health Detail##Signal_Name
4 Bytes Byte 1 page version mismatchByte 2 page heartbeat
timeoutByte 3 read/write semaphore timeout
ISBus I/O Driver
+-
AC+-
AC
ISBusISBus
Innovation SeriesController
+-
AC
InnovationSeries
ISBus is a fast synchronous serial bus, which provides a high
performancereplacement for a parallel I/O bus. Its primary purpose
is to maintain tightsynchronous coupling (1, 4, 8 msec) between
different devices in a control system.Two services are provided,
the majority of the bandwidth is allocated for sharingregister data
between a master device and a set of slave devices. Any
remainingbandwidth is used to implement an asynchronous channel for
configuration data. Forexample, the following table shows
permissible maximum frame rates for differentnumbers of slave
drives.
Number ofdrives
Maximumframe rate (ms)
4 116 430 8
ISBus I/O Point Signals Data Type DescriptionSignal_Name
Boolean,
Integer, or RealValue of signal
Point Health#Signal_Name
N/A N/A
Point Health Detail##Signal_Name
N/A N/A
-
GEP-9145 Innovation Series Controller 25
The Control System Toolbox is used to configure and maintain the
Innovation Seriescontrollers. It is a Windows-based application,
which runs on an IBM PC
compatible personal computer (PC). Primary functions of the
toolbox include: Configuration of controller and I/O hardware
Configuration, monitoring, and documentation of control
logic
Configuration and monitoring of trend graphs
The toolbox work area has three views that can be dynamically
sized:
Outline View (left hand side) contains device configuration
items.Summary View (right hand side) contains detailed view of item
selected.Error Log View (bottom) displays function errors when they
occur in the toolbox.The status bar displays toolbox commands and
device settings. Ethernet is used asthe communications network
between the Innovation Series controllers and toolbox.
Outline View
Summary View
Error LogView
Status Bar
Choose Detached Summary todisplay a separate window
Control System Toolbox
-
26 GEP-9145 Innovation Series Controller
Configuration of I/O Drivers and HardwareHardware modules and
I/O devices define the I/O used by the controller and connectI/O
with signals referenced in control logic. Each of the I/O drivers
and hardwaredevices are configured as follows:
1. Insert an I/O driver or I/O device under the item, Hardware
and I/O Definitionsitem in the Outline View.
2. Modify the hardware parameters using the associated dialog
box.
3. Define the I/O points associated with the I/O device or
driver and connect themto internal signals.
-
GEP-9145 Innovation Series Controller 27
Organization of Control LogicControl logic is organized at
several levels to address functional partitioning, codereuse, and
performance requirements. The following table describes these
levels onthe heirarchy, from the bottom up.
Control Logic Item Examples DescriptionInstruction Block A
library of instructions provide fundamental building
blocks for the control logic.
The order of execution for the instructions is determinedby the
order of entry within the task.
There are two views of the library:A list view of the
instruction blocks in order of sequencethat does not illustrate
signal connection betweenblocks.A connected view that displays
signal connection (lines)between blocks and order of execution with
blocknumbers. This connected view is auto generated.
Logic is documented by inserting comment blocks.
User Defined Macro Instance of Toggle macro
Logic within Toggle macro
User-defined instruction used for common controlfunctions.
Attributes of a Macro include:
Name 12 charactersRevision V##.##nEnable Pin Enables
executionPins Parameters for the macro
Macros can be nested up to three levels. Each time amacro is
inserted in logic, a unique copy is generated.This allows the user
to monitor the logic within themacro.
Task Outline View of task A task has 1 to n instruction blocks
and macros that areexecuted at a given rate (1 256 msec) and
priority(high/medium/low).
At the beginning of the task, all external inputs arecopied from
the I/O Table to the Software Signal Tablefor reference during
execution of control logic. Aftercompletion of the control logic,
external outputs arecopied to the I/O Table.
-
28 GEP-9145 Innovation Series Controller
Control Logic Item Examples Description
Module Outline View of modules A module provides another method
for dividing up thecontrol logic and is also a tool for control
logic reuse at ahigher level than a macro. Normally, a macro is
used atthe device (motor or solenoid valve) level and a moduleis
used at the manufacturing function (furnace section,coil car, mill
stand) level.
A module is made up of 1 to n tasks that can operate atdifferent
rates and the same priorities.
A Graphic Window file can be associated with eachmodule.
Function Outline View of functions A function acts as a grouping
mechanism for relatedmodules.
All external I/O signals to be used in the function aredefined
in the item, Signal Definitions in the OutlineView.
All macros specific to the function are defined in theitem,
Macro Definition in the Outline View.
Graphics Window that can be associated with a module
-
GEP-9145 Innovation Series Controller 29
Instruction Blocks
Instruction Block DescriptionCommunicationsALARM_XMIT Sends a
Status-S alarm message (TXTS message with text substitution or
TXTV
message with variable substitution) whenever the alarm state
changes on eitherDLAN+ or Ethernet.
DYNAMIC_GRP Transmits a message that adds or removes a device
from various dynamicgroups and is similar to the message maker
block
LD_AUTO Evaluates the INPUT variable using the limit information
available from thesignal definition and communicates the results
through five Boolean variables.
LD_MAN Evaluates the INPUT variable per a list of limit
specifications and communicatesthe results through five Boolean
variables.
SS_ONE_DEST Transmits Status-S Command (protocol 2) messages
over a DLAN+ networkattached to the controller.
SS_PERIOD Changes the transmission period of an owned Status_S
feedback page.MathAVRG Computes a rolling average of the last N
inputs presented to the block.MENG_n Solves a mathematical equation
of up to 8 inputs and places the result in the
output signal, whose data-type is implied by the block
suffix.MIN_MAX Passes the minimum or maximum value from the input
list to the output.CLAMP_n Restricts the output to values of the
input between and/or equal to the maximum
and minimum limits.COMHYS Compares two real values implementing
hysteresis and sensitivity, and sets an
output Boolean reflecting the result.COMPARE_D/F Compares two
real values and sets an output Boolean reflecting the
result.COMPARE_I/L Compares two integer values and sets an output
Boolean reflecting the result.LogicBIT_CNTR Counts the number of
input bits that are currently set to TRUE.BENG Solves a Boolean
equation of up to 16 Boolean inputs, placing the result in the
output variable.BENG_D Solves a Boolean equation of up to 16
Boolean inputs, placing the result in the
output variable.FiltersBFILT Passes a rising TRUE value on the
input pin to the out pin if it remains TRUE for
PU_DEL time .FIR Implements a finite impulse response
filter.
-
30 GEP-9145 Innovation Series Controller
Instruction Block Table continued`
Instruction Block DescriptionSequencingBRANCH Used to create up
to eight branches from a single Sequential Function Block
(_SFB) step.CHG_DET_n Sets the OUT to TRUE whenever it detects a
difference between IN and STATE
greater than the absolute value of DBAND.MERGE Used to merge up
to eight branches into a single Sequential Function Block
(_SFB) step.PE_DA Used to start and stop some function with
evaluation of permissives and
diagnosis of such permissives when required.PENG Sets its ON
output TRUE when the ONREQ input goes TRUE, provided the start
and run permissive inputs are TRUE.PE_SA Used to initiate some
maintained function with evaluation of permissives and
diagnosis of such permissives when required.PE_TOGGLE Used to
initiate and end (in a toggle fashion) some maintained function
with
evaluation of permissives and diagnosis of such permissives when
required.PULSE Generates a Boolean one-shot of the specified width
at the output pin on the
rising edge of the trigger.SEQMGR Collects global status
information from all of the Sequential Function blocks
(_SFBs) in a sequence and distributes global inputs to each of
these blocks.SFB Creates a step in an automatic sequence.Data
CollectionCAPTURE Collects samples of up to 32 signals in a buffer
that may be uploaded by the
toolbox for display and analysis.FUNGEN Creates common signal
functions for test and verification.Memory MoveCNT_TO_BOOL Uses an
integer input to linearly select one of up to 32 Boolean outputs,
where
N can range from 1 to 32.COMPRESS Packs up to 16 Booleans into a
single integer variable.EXPAND Transforms the input into its binary
equivalent form and stores the expanded
information into 16 simple, Boolean outputs.GET_n Moves a value
from an array into a signal of the same data-type.LATCH Sets or
resets OUT based on the current values of SET and RESET, and
the
previous value of OUTMOVE_n Transfers the value of any signal
into another signal whose datatype matches
that denoted by the block suffix.PUT_n Moves a value from a
signal into an array element of the same datatype.SELECT_n Moves
one of the eight inputs, or the cascade pin into the output, based
on the
prioritized evaluation of the eight selection pins.SET_ARRAY_n
Initializes an entire array with a single value when
enabled.STEER_n Move the input to one of the eight outputs, or to
the cascade pin, based on the
prioritized evaluation of the eight selection pins.
-
GEP-9145 Innovation Series Controller 31
Instruction Block Table continued
Instruction Blocks DescriptionPseudo-ControlCOMMENT Used to
force a break in the hard copy block diagram.Timers /
CountersCOUNTER Accumulates rising edges of the INC pin into
CUR_CNT while the RUN is TRUE
and CUR_CNT is less than MAX_CNT.TIMER Accumulates incremental
time into CURTIME while RUN is TRUE.TestCTIME Calculates the time
in s between successive executions of the block.NOP Performs no
execution at all.DiagnosticsDEV_FLTS Displays the state of selected
CPU device faults.Program ControlEX_MAC Immediately exits the
execution of a block macro if its ENABLE pin is TRUE.EX_TSK
Immediately exits the execution of a task if its ENABLE pin is
TRUE.I/OGENI_HSCB Sets the Preload Value and On/Off Preset
registers of type B High-speed
Counter blocks with specified values.IN_CVRT Converts coded
decimal Booleans into a long integer.OUT_CVRT Converts a long
integer into coded decimal Booleans.OUT_XFER Conditionally
transfers a value to an input point owned by this Innovation
Series
controller.PRESET_CNTR Provides a mechanism to preset a given
VME High Speed Regulator I/O module
counter input to a specified value.RegulatorsINTWLEAD Computes
the integral of IN with a lead term.PID Performs proportional,
integral and derivative control on the setpoint, measured
value feedback, and a derivative source.RAMPH Takes a
current_ramp and increments and decrements the value until the
final
value is reached.SRAMP Modifies the SPEED Output to the FINAL
value following a S-Curve.TRNFUN_n Provides a digital
implementation of a transfer function. This equation can
approximate a phase lead, phase lag, simple lag, phase lead/lag,
or a bridged-T(Notch) compensator depending upon the choice of the
appropriate coefficients.The block can also be used to create
Butterworth, Chebyshev, etc., secondorder filters and can be
cascaded to form higher order filters.
-
32 GEP-9145 Innovation Series Controller
The Innovation Series controllers provide a unique diagnostic
function forpermissive faults in control logic. The following
sections describe howcontrollers diagnose and present faults.
A common problem in control system maintenance today is the
length oftime required to diagnose a permissive related machine
fault. The followingare examples of permissive related faults:
Permissive Fault Root Cause
Pump motor does not start Intake valve is closed
Conveyor motor does not start Broken limit switch
Material handling system doesnot go to automatic mode
Safety gate is open
Electrical drive trips out Intermittent current overload
fault
The typical scenario for troubleshooting a permissive fault is
as follows:
StepTime(Minutes) Description
5 10
10 15
10 20
Operator alerts maintenance of the problem.
Technician locates programming softwarefor the controller and
connects to thesuspect controller.
Technician traces back from device that willnot start (or is
tripped out) through thecontrol logic, looking for the root
permissive(or group of permissives) causing theproblem.
Total = 25 45 minutes
Permissive Diagnostic Function
-
GEP-9145 Innovation Series Controller 33
Currently HMI permissive screens help operators and technicians
troubleshootpermissive faults. These screens contain animated lists
of permissives for keyfunctions. However, there are two significant
problems with this approach:
1. Extensive engineering is required to design and test an
animated permissivescreen for every control function.
2. Synchronization of the permissive screens in the HMI system
and controllogic is a manual operation.
The Innovation Series controllers resolve this problem with a
unique set of controlinstruction blocks and associated operator
interface tools (Diagnose). By categorizingthe permissives and
identifying the start and stop triggers, the controller firmware
candetect and diagnose permissive faults. The operator is alerted
to permissive faults andpresented with a relay ladder logic (RLD)
representation of the permissives causingthe fault.
This dramatically changes the common troubleshooting as
follows:
StepTime(Minutes) Description
-
5
Operator detects problem with pushbutton
Permissive diagnostic function graphicallytells the operator the
cause of the problem.
Total = 5 minutes
Fault DetectionThe instructions blocks in the following figure
contain the permissive logic for a SpotJog Forward and Spot Jog
Reverse function. The permissives are categorized intostart (SPRM)
and run permissives (RPRM), and on requests (ONREQ), off
requests(OFFREQ). This allows the Permissive Engine (PENG) block to
detect permissivefaults.
-
34 GEP-9145 Innovation Series Controller
A start permissive fault occurs when the ONREQ input transitions
to True and eitherthe SPRM or RPRM inputs are False. A run
permissive fault occurs when the ONoutput transitions to False due
to the loss of SPRM or RPRM. Upon detection of apermissive fault,
the state of all Boolean variables involved (including
variablesreferenced in instructions feeding into the permissive
engine instruction) in thecontrol logic are captured and archived
with Message View.
A chronological log of permissive faults is available in a
tabular Windowsapplication for the operator and maintenance
personnel. A fault code is also put intoSTATUS output allowing the
graphical HMI system to indicate a permissive fault.
Innovation Series Controller Permissive Logic
HMI OperatorScreen
Spot JogFoward
Spot JogFoward
Spot JogReverse
Spot JogReverse
AnimationVariable
Message View
Spot Forward Jog Start Permissive Fault 01:23:34.34 04/03/98
Spot Rerverse Jog Start Permissive Fault 01:15:03.54
04/03/98
Hydraulic Pump 1 Run Permissive Fault 01:09:34.34 04/03/98
Entry Auto Mode Start Permissive Fault 01:04:35.36 04/03/98
Permissive Fault
Detection of permissive faults with the Innovation Series
Controllers
-
GEP-9145 Innovation Series Controller 35
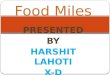
Presenting the DiagnosisThe permissive diagnostic application
(Diagnose) can be started from the graphicalHMI system or the
chronological permissive fault log (Message View).When started from
the HMI system, Diagnose is given the name of the controller
andname of signal being controlled. It then passes that information
to the controller,where the diagnostic function is performed. The
diagnostic information is thenpassed back to Diagnose, which
presents the missing permissives in a relay ladderdiagram (RLD)
format (see figure below).
When started from Message View, Diagnose is given the name of
the controller,name of signal being controlled, and the status of
all Boolean variables involved inthe control logic for that signal
at the time of the fault. This allows the permissivediagnostic
function to detect the loss of a permissive in the controller.
Aftercompleting the diagnosis, the results are sent to Diagnose,
which presents the missingpermissives in RLD format (see figure
below).
Innovation Series Controller Permissive Logic
HMI Operator Screen
Spot JogFoward
Spot JogFoward
Spot JogReverse
Spot JogReverse
Message View
Spot Forward Jog Start Permissive Fault 01:23:34.34 04/03/98
Spot Rerverse Jog Start Permissive Fault 01:15:03.54
04/03/98
Hydraulic Pump 1 Run Permissive Fault 01:09:34.34 04/03/98
Entry Auto Mode Start Permissive Fault 01:04:35.36 04/03/98
PermissiveFault
AnimationVariable
Presentation of missing permissives to operator
-
36 GEP-9145 Innovation Series Controller
Innovation Series Controllers
Catalog Number DescriptionDS215UCVBG1 VME, 1 DLAN+ / 1 Genius
busDS215UCVBG3 VME, 2 DLAN+ / 2 Genius busesIS215UCVCH1 VME, 1
ISBus bus / 1 Genius busIS215UCVCH3 VME, 2 ISBus buses / 2 Genius
busesIS215UCVCH5 VME, 1 ISBus bus / 1 DLAN+ / 2 Genius
busesIC697CHS782 Series 90-70 VME integrators rack, 17 slots, rear
mountIC697CHS783 Series 90-70 VME integrators rack, 17 slots, front
mount
Innovation Series Controller I/OCatalog Number
DescriptionDS200SIOBH1A VME High-speed regulator I/O module, 1 VME
slot259B2405P1 Terminal block for DS200SIOBBH1A (one per
module)259B2409AA: Interface cable for J1:
G01 250 cm (98)G02 226 cm (89)G03 201 cm (79)G04 264 cm (104)G05
236 cm (93)
259B2409AB: Interface cable for J2:G01 244 cm (92)G02 211 cm
(83)G03 185 cm (73)G04 250 cm (98)G05 221 cm (87)
DS2020LRPAG2 Inductosyn I/O module (panel mounted)2 Farrand
Inductosyn inputs 2 A Quad B outputsDLAN+ (57 KB serial) 120/230 V
ac input
DS2020LRPBG1 Resolver I/O Module (panel mounted)2 dual resolver
(fine/coarse) inputs2 A Quad B outputsDLAN+ (57 KB serial) 120/230
V ac input
DS2020LRPBG2 Resolver I/O module with Genius (panel mounted)2
dual-resolver (fine/coarse) inputs2 A Quad B outputsDLAN+ (57 KB
serial) 120/230 V ac input powerGenius bus interface for
configuration and exchange ofruntime data
Ordering Information
There is a limit of five VME high-speed regulator I/O modules
orfive VME dual Genius buscontrollers in an InnovationSeries VME
rack.
VME controllers are to beinstalled in the Series
90-70integrators rack only.
Each controller is shipped with aSystem Manual.
ACL controllers are availableonly as an option in the
drivecontrol rack (not sold separate).
-
GEP-9145 Innovation Series Controller 37
Genius I/O System Blocks and OptionsCatalog Number
DescriptionIC660BBD101 115 V ac 8-Circuit I/O block, low leakage
*IC660BBS102 115 V ac/125 V dc Isolated 8-Circuit I/O block,
with
failed switch diagnostics *IC660BBS103 115 V ac/125 V dc
Isolated 8-Circuit I/O block, without
failed switch diagnostics *IC660BBD110 115 V ac 16-Circuit
blockIC660BBD020 24 48 V dc Source I/O block, 16-Circuit, 3-wire
sensor
compatible*IC660BBD021 24 48 V dc Sink I/O block, 16-Circuit, 3
wire sensor
compatible *IC660BBD022 24 V dc Source I/O block, 16-Circuit, 2
or 3 wire sensor
compatible *IC660BBD023 24 V dc Sink I/O block, 16-Circuit, 2 or
3 wire sensor
compatible *IC660BBD024 12/24 V dc Source I/O block, 32-Circuit
*IC660BBD025 5/12/24 V dc Sink I/O block, 32-Circuit *IC660BBR100
Relay output block, normally closed, 16-CircuitsIC660BBR101 Relay
output block, normally open, 16-CircuitsIC660BBA100 Analog I/O
block, 115 V ac Power, 4 inputs / 2 outputsIC660BBA104 Analog I/O
block, current source, 115 V ac/125 V dc power,
4 inputs / 2 outputsIC660BBA105 Analog output block, current
source, 115 v ac/125 v dc power, 6
outputsIC660BBA106 Analog input block, current source, 115 v
ac/125 v dc power, 6
inputsIC660BBA020 Analog I/O block, 24/48 v dc power, 4 inputs /
2 outputsIC660BBA024 Analog I/O block, current source, 24/48 V dc
power,
4 inputs / 2 outputsIC660BBA025 Analog output block, current
source, 24/48 V dc power,
6 outputsIC660BBA026 Analog input block, current source, 24/48 v
dc power, 6 inputsIC660BBA103 Thermocouple input block, 115 V
ac/125 V dc power, 6 channelsIC660BBA023 Thermocouple input block,
24/48 V dc power, 6 channelsIC660BBA021 RTD input block, 24/48 V dc
power, 6 channelsIC660BBA101 RTD input block, 115 V ac/125 V dc
power, 6 channelsIC660BBD120 High-speed counter, up to 200 KHz, 4
inputs, 4 outputs,
115 V ac powerIC660BPM100 Power TRAC block, 3-phase power
monitoring, 115/230 V ac,
monitors frequency and total harmonic power content of
eachphase
IC660HHM501 Hand held monitor
* Points can be individually configured as inputs or outputs
-
38 GEP-9145 Innovation Series Controller
Field Control I/O System Components and OptionsCatalog Number
Description
Bus Interface Units (BIUs)IC670GBI002 Genius BIU, 24V dc
power
Genius BIU, 115 V ac powerField Terminal Bases
IC670CHS001 I/O base, barrier style, accepts 2
modulesIC670CHS002 I/O base, box style, accepts 2
modulesIC670CHS003 High-density connector base, accepts 2
modulesIC670CHS004 Thermocouple cold junction compensation
baseIC670TBM001 Auxiliary Terminal block, quantity 2 barrier
styleIC670TBM002 Auxiliary Terminal block, quantity. 2 box
styleIC670CBL002 53 cm (21) I/O base expansion cable (limit 1 per
station)IC670CBL003 2 m cable for connector style base, connector
on one endIC670CBL004 1 m cable for connector style base, connector
on one end
Field I/O ModulesIC670MDL640 24 V dc positive/negative input
16-point groupedIC670MDL740 12/24 V dc 0.5A positive output
16-point groupedIC670ALG230 Analog input current 8-point,
groupedIC670ALG320 Analog output current/voltage 4-point,
groupedIC670MDL641 48 V dc positive/negative input 16 point,
groupedIC670MDL240 120 V ac input 16-point, groupedIC670MDL241 240
V ac input 16-point, 2 groupsIC670MDL331 120 V ac 2A output
8-point, isolatedIC670MDL330 12-120 V ac output 16-point,
groupedIC670MDL930 Relay 2A 8-point 6-form a/2-form C
isolatedIC670MDL642 125 V dc input 16-point, groupedIC670ALG240
Analog input current 16-point, groupedIC670ALG330 Analog output
current 8-point, groupedIC670ALG630 Thermocouple 8-point,
isolatedIC670ALG620 RTD 4-channel isolated 3-wireIC670MDL643 5/12 V
dc input 16-point, 2 groupsIC670MDL742 5/12 V dc output negative,
16-point, groupedIC670MDL644 12/24 V dc positive/negative 16-point,
grouped fast input IC670MDL730 24 V dc electronic short circuit
protection 8-point, outputIC670MDL233 120 V ac 8 point, isolated
input
AccessoriesIC660HHM501 Hand held monitorIC670ACC001 8 cm (3
inch) base-to-base replacement connector cable
(quantity 16)IC670ACC002 I/O module keying kit, quantity for 16
modulesIC670ACC003 Connector kit for connector style base
-
GEP-9145 Innovation Series Controller 39
Control System Solutions (Windows NT Applications &
Service)Catalog Number ProductDS208xxxxxx Innovation Series
Controller Configuration (toolbox application)
Innovation Series controller configuration Genius & Field
Control I/O configuration Operator Console 2000 (OC2000)
configuration Dual Resolver I/O module configuration System
Database Server Graphics Window Check In/Out Utility
Innovation Series Drive Configuration (toolbox application)
Innovation Series drive configurationAC/DC/EX2000 Drive
Configuration (toolbox application)
AC/DC/EX2000 drive configurationAV-300/DV-300 Drive
Configuration (toolbox application) AV-300/DV-300 drive
configurationTrend Recorder (toolbox application) Trend window
configuration and monitoringData Historian (toolbox application)
Data Historian service and configuration (requires SDB)System
Integration Applications System Database Utilities CIMPLICITY HMI
Alarm Manager Service (GECAMS) CIMPLICITY HMI DLAN+ Devcom
CIMPLICITY HMI Integrated Control Network (ICN) Devcom System
Database Server SDB Interface From CimEdit System Database Exchange
SDB Interface for CIMPLICITY Control, GE Fanuc Data Panels
(WinConfig), and for Third Party Devices Series 90-70 Interface
Module Configuration (BEM763)Maintenance & Diagnostic
Applications Diagnose Mode Logger Message Archiver (DLAN+ &
Ethernet) DLAN+ Status Message View
Demonstration CD - Contains all functionality for 30 days
To determine catalognumbers, refer to thesection, CatalogNumber
Structure onthe next page andenter the propernumbers (where x =a
number or a letter).
-
40 GEP-9145 Innovation Series Controller
Catalog Number Structure
1 = Innovation Series Controller Configuation
Controller Option0 = No Controller Configuration
2 = AC/DC/EX2000 Drive Configuration
Drive Option0 = No Drive Configuration
1 = Innovation Series Drive Configuation
3 = AV-300/DV-300 Drive Configuration
4 = Innovation Series, AC/DC/EX2000, and AV-300/DV-300 Drive
Configuration
1 = Trend Recorder, no Data Historian
2 = Trend Recorder and Data Historian
Trend Recorder /Data Historian Option0 = No Trend Recorder or
Data Historian
1 = System Integration Tools
System IntegrationApplications0 = No System Integration
Tools
1 = Advanced Maintenance & Diagnostic Tools
Advanced Maintenance &Diagnostic Applications0 = No Advanced
Maintenance & Diagnostic Tools
Catalog NumberX = Selected OptionDS208 X X X X X X X
B = Quantity 5 PCs
Quantity OptionA = Quantity 1 PC
C = Quantity 10 PCs
D = Quantity 15 PCs
D = Demonstration CD (30 days)
Demonstration CD0 = Not Demonstration CD
-
General Electric CompanyAll Rights Reserved
GE Industrial SystemsGeneral Electric Company
1501 Roanoke Blvd.Salem, VA 24153, USAAv. L. N. Alem 619Piso 9,
Buenos Aires, Argentina 1001146 Arthur Street, Suite 501North
Sydney, NSW 2060,AustraliaAv. Nove de Julho; 522901407-907 Sao
PauloSao Paulo, Brazil
No. 35 Kowa Bldg.; 5th Floor1-14-14; Akasaka 1-chomeMinato-ku;
Tokyo 107, Japan17F, Kunja Buiding942-1 Daechi-dong,
Kangnam-kuSeoul,135-280 KoreaZaragoza 1300 Sur; Edificio KalosPiso
A-3; Despacho 3396400 Monterrey, N.L., Mexico9 Boh.Getta
Warszawskiego St. Gliwice, Poland 44-100Kosmodamianskaya Nab
52Bldg. 1, 6th FloorMoscow, Russia 113054
18, rue Horace Vernet, 92136 Issy-les-Moulineaux CedexParis,
FranceMarzahner Strasse 34D-13053 BerlinGermanyPraunheimer
Landstrasse 50D-60488 Frankfurt/MainGermanyUnit 1725 17/F Pacific
Trade Ctr.2 Kai Hing RoadKowloon Bay, Hong KongVia S. Girolamo 31/C
Parco Massimo Bari, Italy 70100
2300 Meadowvale Blvd.Mississauga, Ontario, Canada L5N 5P9Al
Cantara 200, 11th Fl.Las Condes, Santiago, ChileBeijing East Ocean
Ctr. Rm.10924 Jian Guo Men Wai DajieBeijing, China 1000221085
Corniche EL-NilGarden City, Cairo, EgyptPasilantie 8
B1Anjalankoski, Finland 46900
GE Towers; 10th Floor240 Tanjong Pagar RoadSingapore 0885408F-2;
No. 6; Ming-Chung; 2nd RdKaohsiung, TaiwanUnit 1103;11/F Diethelm
Twr. B93/1 Wireless RoadPatumwan, Bangkok, ThailandApt. No. 2319Mim
Kemal Oke Cad. Lal 80200 Nisantasi, Ist, Turkey
g
GEP-9145CADMUS
SEPTEMBER 1998
ContentsCommitment to QualityOverviewInnovation Series
ControllersExecution of Control LogicI/O DriversControl System
ToolboxPermissive Diagnostic FunctionOrdering Information