Embed Size (px)
Citation preview

1
ME 680- Spring 2014
Geometrical Analysis of 1-D Dynamical Systems

2
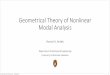
Logistic equation: 𝒏 = 𝒓𝒏(𝟏 − 𝒏)𝒗𝒆𝒍𝒐𝒄𝒊𝒕𝒚 𝒇𝒖𝒏𝒄𝒕𝒊𝒐𝒏
The length of the arrows magnitude of the velocity
(function) at that point.
Geometrical Analysis of 1-D Dynamical Systems
Equilibria or fixed points : initial conditions n* where you
start and stay without evolving for all time. They
correspond to zeros of the velocity function:
n*=0 n*=1 n
f(n) Phase diagram

3
𝛼 −limit set of a point (initial condition) 𝑛0 :
It is defined as the set of limit points of the trajectory
started at 𝑛0, for t → - . Thus,
𝛼(𝑛0) = 𝑛 | lim 𝜑 (𝑛0, 𝑡) = 𝑛𝑡→−∞
𝜔 −limit set of a point 𝑛0 is the set
𝜔(𝑛0) = 𝑛 | lim 𝜑 (𝑛0, 𝑡) = 𝑛𝑡→+∞
Existence of a potential function: Consider 𝒏 = 𝒇(𝒏)
(Gradient Dynamical System)
Let there be a function V(n) such that 𝒇(𝒏) = −𝛛𝑽 𝝏 𝒏
Example: for the Logistic equation 𝒇(𝒏) = 𝒓 𝒏 (𝟏 − 𝒏),
i.e., 𝑽(𝒏) = −𝒓𝒏𝟐 𝟐 + 𝒓𝒏𝟑 𝟑

4
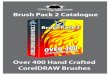
Then, note that the equilibrium points for the system (a
Gradient Dynamical System) are at the local extrema of the
potential function. This is where the similarity with mechanical
systems with potential energy functions ends!! Considering the
Logistic equation:
𝑽(𝒏) =−𝒓𝒏𝟐
𝟐+
𝒓𝒏𝟑
𝟑
the plot of the potential function, and the equilibrium
points are as follows:
V(n)
n n*=0
n*=1

5
Oscillatory behavior is not possible in 1-D autonomous Systems
Trajectories approach the equilibrium point n*=1, but
never reach it in finite time.
Invariant subspaces are regions 𝑰 ⊆ 𝕽 in phase space where
if 𝒏𝟎 ∈ 𝑰, then 𝝋 𝒕, 𝒏𝟎 ∈ 𝑰 for all negative and
positive flow times (- < t < ). For the Logistic Equation,
the invariant subspaces are:
𝑰𝟏 = −∞,𝟎 , 𝑰𝟐 = 𝟎 , 𝑰𝟑 = 𝟎, 𝟏 , 𝑰𝟒 = 𝟏 , 𝑰𝟓 = {𝟏,+∞}
Thus, the state space is decomposed into:
ℝ = 𝑰𝟏 ∪ 𝑰𝟐 ∪ 𝑰𝟑 ∪ 𝑰𝟒 ∪ 𝑰𝟓
𝜶 𝒂𝒏𝒅 𝝎 limit sets of any initial condition 𝑛0:
Observations:

6
If 𝒏𝟎 ∈ 𝑰, 𝑡ℎ𝑒 𝜶 − limit set is 0
𝝎− limit set is−∞
If 𝒏𝟎 ∈ 𝑰𝟐, 𝑡ℎ𝑒𝑛 𝜶 − 𝑎𝑛𝑑 𝝎− limit sets are the same
If 𝒏𝟎 ∈ 𝑰𝟑, 𝑡ℎ𝑒𝑛 𝜶 (𝒏𝟎) = {𝟎}, 𝑎𝑛𝑑 𝝎(𝒏𝟎) = {𝟏} ⋯ 𝑠𝑜 𝑜𝑛.
Stability of Equilibria/Fixed Points
An equilibrium point of 𝒙 = 𝒇(𝒙), say x=x*, is stable if
∀𝜺 > 𝟎 , ∃ 𝜹 (𝜺) > 𝟎 such that for any initial condition x0,
with | 𝒙𝟎 − 𝒙∗ | < 𝜹, |𝝋 (𝒕, 𝒙𝟎) − 𝒙∗| < 𝜺 𝒇𝒐𝒓 𝒂𝒍𝒍 𝒕, 𝟎 < 𝒕 < +∞.
Otherwise, it is unstable.

7
This definition of stability is very difficult to use directly to
deduce stability of an equilibrium point. One needs to a
priori know the solution for every given initial condition
starting inside the region of size δ. Thus, one really needs
to find other criteria that can be used to characterize stability
without solving the differential equation.
If in addition, |𝜑(𝑡, 𝑥0) − 𝑥∗| → 0 𝑎𝑠 𝑡 → ∞, 𝑡ℎ𝑒𝑛 𝑥∗ is an
asymptotically stable equilibrium.
x*
δ
x* x0

8
1. Logistic Equation
n*=0 (unstable)
n
f(n)=an2
n*=0 (stable) n
f(n) = −an3
Examples:
Observe: Any isolated stable equilibrium in 1-D
autonomous systems has to be asymptotically stable.
2. Quadratic System
n*=0
(unstable) n*=1 n
f(n)=rn(1−n)
(asymptotically stable)
3. Cubic System

9
Let x* be a fixed point of 𝑥 = 𝑓(𝑥), i.e. 𝑓(𝑥∗) = 0
To linearize about x = x*, introduce a perturbation:
𝐿𝑒𝑡 𝑥 = 𝑥 − 𝑥∗ ⇒ 𝑇ℎ𝑒𝑛 𝑥 + 𝑥 ∗ = 𝑓(𝑥 + 𝑥∗)
x x0 0
dfor x x f(x ) x
dx
x 0
dfx x
dx
This is the linearized equation about x = x*
Linearization about equilibrium points
(Taylor series expansion for small 𝑋 )

10
The equilibrium points are 𝑛∗ = 1 𝑎𝑛𝑑 𝑛∗ = 0.
Let us linearize the system about 𝑛∗ = 1
Then 𝑛 = 𝑛∗ + 𝑛 = 1 + 𝑛
and 𝑛 = 𝑟(1 + 𝑛 ) (−𝑛 ) = −𝑛 𝑟 − 𝑟𝑛 2
dfr n r n
dn n 0
n 0
df0
dn
This is the linearized system near 𝒏∗ = 𝟏 . Note that 𝒏∗ = 𝟏 is linearly stable. We can make the connection between linear stability (i.e. stability of equilibrium for the linearized system) and nonlinear stability if (only if)
Example: Logistic Equation: 𝑛 = 𝑟 𝑛(1 − 𝑛)
(Hartman-Grobman theorem)

11
𝑥 = 𝑓(𝑥) ; 𝑓(𝑥∗) = 0 ⇒ 𝑥∗ is an equilibrium
There are a few ways to linearize the system.
(i):
* *
*
dfx f(x ) (x x )
dx x x
* * *
*
dfx x f(x ) (x x )
dx x x
*x x x. Then
*
dfx x
dx x x
Closing Remarks on Linearization
(Taylor series expansion)
Let
linearized system around an
Equilibrium

12
(ii): Let 𝑥 = 𝑥∗ + 𝑥 . 𝑇ℎ𝑒𝑛
* * ˆx x f(x x) f(x)
ˆdfˆx f(0) xdx x 0
ˆdfor x x
dx x 0
*
ˆdfx x
dx x
*
ˆdfx x(0)exp( t)
dx xGeneral solution of is
eigenvalue
if eigenvalue < 0, x=x* is asymptotically stable if eigenvalue > 0, x=x* is unstable

13
If eigenvalue is ≠ 0, the equilibrium is called
“hyperbolic”. Otherwise, it is called “non-hyperbolic”.
According to the Hartman-Grobman theorem, if x* is a
hyperbolic equilibrium, stability conclusions drawn from
linearized equation (linear stability) ↔ hold also for the
nonlinear model (nonlinear stability)
if , then we have to look at higher order
terms in the Taylor series to judge stability.
,*
df0
dx x

14
Interesting dynamics can occur as system (or control)
parameters vary: Equilibria can suddenly change in
number or stability type.
Ex: Consider the example of a cantilever beam with a
mass on top, with the mass being a control
parameter:
For mg < Pcr (1 equilibrium) For mg > Pcr (3 equilibriums)
mg
g g
Bifurcations of equilibria in 1-D

15
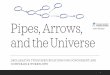
A prototypical example:
• 𝒙 = 𝒓 + 𝒙𝟐 here r is some control parameter
The velocity functions for three distinct cases are as
follows:
x
x
r
r < 0
two equil
x
x
r = 0
one equil
x
x
r > 0
no equil
Saddle-node bifurcation (fold, or turning point, blue sky bifurcation)

16
We can present these results in a diagram of
equilibrium solutions x* as a function of the parameter r.
This is a bifurcation diagram. (r = 0, x* = 0) is the
bifurcation point. This is called a subcritical saddle -
node bifurcation.
X*
r
stable
unstable
r =0

17
Linear Stability Analysis
r > 0 : the equilibrium points are
2
Consider the system:
x r x f(x)
*x r
*
*
*
The function derivative is
x r , asympt staw be get ( le)
df
dx x x
dfFor 2 r
dx x x
X*
r
stable
unstable
r =0
Supercritical saddle node bifurcation:

18
Note that both equilibria are hyperbolic
At r = 0, however, i.e., Hartman-Grobman
theorem fails!
Consider the velocity function at r = 0:
The equilibrium at x*=0
is actually unstable!
**
dfFor x r, we get 2 r
dx x(unst
xable)
df0
dx x 0
x x
df0
dx
x
x
r = 0
one equilibrium

19
xConsider a system governed by : x r x e f(x)
x* **
df1 e 0 x 0
dx x 0 *r 1
r < r* r = r* r > r*
r
(r-x)
e-x
r
(r-x)
e-x
r
(r-x)
e-x 1 1 1
x x x
Another example
We can determine the equilibria and find their stability via
linearization:
What is the critical value of r? At critical value, x* and r*
must satisfy f(x*) = 0 → r* - x* - e-x* = 0 as well as

20
In a sense, f(x) = r ± x2 are prototypical of all 1-D systems
undergoing a saddle-node bifurcation.
Consider the system just studied: * *xx f (x,r) with r 1, x 0.r x e
* ,x x *r r
*r r r 1 r and x x x x
2 2x 1 r x (1 x x / 2 ) r x / 2
x
f(x,r) increasing r for r=r*
Brief Introduction to Normal Forms
Near the critical point,
for small and write
higher order
terms
same form as that of super-critical saddle node bifurcation

21
f(x) = a + bx2 is the “normal form” of saddle - node bifurcation,
i.e., all systems in 1-D undergoing this bifurcation must locally
possess this form.
Transcritical Bifurcation
The normal form for this bifurcation is 𝒙 = 𝒓 𝒙 − 𝒙𝟐
(similar to 𝒏 = 𝒓 𝒏 (𝟏 − 𝒏), the logistic equation).
Consider the velocity function for different parameter
values: x
x
r < 0
two equil
x
x
r = 0
one equil
x
x
r > 0
two equil

22
We can display the results in the form of a bifurcation
diagram:
Example: Lasers. See notes.
x*
r
x*=r
x*=0 r=0
This is called a
transcritical bifurcation

23
Active
material
pump
laser light partially reflecting
mirror
Example: Laser threshold
At low energy levels each atom oscillates acting as a little
antenna, but all atoms oscillate independently and emit
randomly phased photons. At a threshold pumping level, all
the atoms oscillate in phase producing laser! This is due to
self-organization out of cooperative interaction of atoms.
(Ref: Haken 1983, Strogatz’s book)

24
Let n(t) - no. of photons
Then, 𝑛 = gain – loss (escape or leakage thru endface)
= 𝐺 𝑛 𝑁 − 𝑘 𝑛
gain coeff > 0 no. of excited atoms
Note that k > 0, a rate constant
Here 𝝉 =𝟏
𝒌 = typical life time of a photon in the laser
Note however that 𝑵(𝒕) = 𝑵𝒐 − 𝜶 𝒏
(because atoms after radiation of a photon,
are not in an excited state), i.e.,
2oo n (GN k)n Gnn Gn(N n) kn or

25
The corresponding bifurcation diagram is:
n*
N0
x*=r
n*=0 N0=k/G
lamp laser
No physical meaning

26
Examples:
We have already seen the example of buckling of a column
as a function of the axial load:
Another example is that of
the onset of convection in a
toroidal thermosyphan
mg g g
fluid
heating coil
Pitchfork bifurcation

27
The normal form for pitchfork bifurcation is: 𝒙 = 𝒓 𝒙 − 𝒙𝟑 = 𝒇(𝒙
The behavior can be understood in terms of the velocity
functions as follows:
x
f(x)
r < 0
x
f(x)
r = 0
x
f(x)
r > 0 X*
r
stable
stable
r =0
unstable stable
Supercritical pitchfork
The bifurcation diagram is then:

28
Consider 𝑥 = 𝑟 𝑥 − 𝑥3 = 𝑓(𝑥)
is stable when r < 0
is unstable r > 0
what about when r = 0? The linear analysis fails!!
For the non-zero equilibria:
eigenvalue is negative if r > 0
i.e., these bifurcating equilbiria are asymp. stable.
*The equilibria are at x 0, r
2*
dfr 3(0) r
dx x 0
*x 0
2*
dfr 3( r ) 2r
dx x r
Linear stability analysis

29
The resulting bifurcation diagram is:
3
*
The normal form is x r x x ,
with equilibria x 0, r
X*
r
unstable
unstable
r =0
unstable
stable
Subcritical pitchfork

30
Usually, the unstable behavior is stabilized by higher
order non-linear terms, e.g., 𝒙 = 𝒓 𝒙 + 𝒙𝟑 − 𝒙𝟓
The resulting bifurcation diagram can be shown to be:
X*
r
unstable
unstable
r =0
unstable stable
subcritical pitchfork, r = rP
supercritical saddle-node, r = rS

31
Let 𝒇(𝒙𝟎, 𝒓𝟎) = 𝟎 𝒊. 𝒆. , (𝒙𝟎, 𝒓𝟎) be an equilibrium.
Let f be continuously differentiable w.r.t. x and r in some
open region in the (x, r) plane containing (𝑥0, 𝑟0).
Then if in a small neighborhood of (𝑥0, 𝑟0),
we must have:
𝑓(𝑥, 𝑟) = 0 has a unique solution x=x(r) such that f(x(r),r)=0
furthermore, x(r) is also continuously differentiable.
No bifurcations arise so long as
Consider the system x f(x,r)
0 0
df0
(x ,r )dx
0 0
df0
(x ,r )dx
Connection between simple bifurcations and
the implicit function theorem

32
The figure below illustrates the idea through two points
along a solution curve.
At (x1,r1), the derivative df/dx does not vanish, where as
at (x2,r2), the derivative df/dx vanishes.
(x1,r1)
x
r
df/dx0
df/dx=0
(x2,r2)

33
Consider the buckling example. If the load does not coincide with the axis of the column, what happens?
Real physical systems have imperfections and mathematical imposition of reflection symmetry is an idealization.
Do the bifurcation diagrams change significantly if imperfections or “perturbations” are added to the model (velocity function)? This is related to the concept of “structural stability” or robustness of models.
g
symmetric loading
mg
asymmetric loading
mg g
Imperfect Bifurcations & Catastrophes

34
Consider the two-parameter normal form:
we now have the two parameters, h and r. Note that it is
a perturbation of the normal form for pitchfork bifurcation
(h=0)
3x h r x x
3y r x x
y h
r 0 , only one equilibrium
possible for any h
3y r x x
cy h, h h (r)
ch h (r)ch h (r)
3 equilibria
in this region
ch h (r)
r > 0 , one or three
equilibria possible

35
Imperfect bifurcations and catastrophes
(cont’d). Consider 𝒙 = 𝒉 + 𝒓 𝒙 − 𝒙𝟑 = 𝒇(𝒙
(h = 0 → normal form of pitchfork) 𝒚(𝒙) = 𝒓 𝒙 − 𝒙𝟑 𝒘𝒊𝒕𝒉 − 𝒉
We look for intersections of
3y r x x
y h
r 0 , only one equilibrium
possible for any h
h in
cre
as
ing
3y r x x cy h, h h (r)
ch h (r)
ch h (r)
r > 0 , one or three
equilibria possible
Cr / 3

36
For critical point
Furthermore,
2 cc c c
rdy0 r 3x 0 x
dx 3
3 c cc c c c c
2r rh r x x 0 h
3 3
only one
equil soln 3 equil
solns
2 equil
solns
cusp
r
h
r=0
h=0
1
2
3
4
rC

37
1.
2.
3.
r
x*
0 rC
r
x*
0
rC
r
x*
0
rC

38
4.
h
x*
0 h=0
r
r=0
h x*
h=0 “catastrophic
surface”
Alternately, in 3-D we can visualize the solutions set as
follows:

39
The equation of motion is:
Let 𝒎𝑳𝟐𝜽 be negligible (imagine pendulum in a vat of molasses)
2mL b mgLsin
The resulting equation is b mgLsin
or
bsin
mgL mgL
g l
θ
m
O
Re
e
1-D system on a circle:
[over-damped pendulum (acted by a constant torque )]

40
(ratio of appl. torque to max.
gravitational torque)
We say that i.e., the phase space is a circle
Consider the system:
[0, 2 ]
dThen sin where
d
mgLLet t ;
b mgL
sin
θ
θ =0 θ =

41
if 𝛾 > 1, pendulum goes around the circle albeit non-uniformly
If 𝛾 = 1, 𝜃∗ = 𝜋 2 𝑖𝑠 𝑎𝑛 𝑒𝑞𝑢𝑖𝑙𝑖𝑏𝑟𝑖𝑢𝑚
1,
θ =0 θ =
θ =/2
*1 2* and
If 1, there are :
whi
two equilibria
opposite stability characteri
ch
s
have
tics
θ =0 θ =
θ 1* θ 2
*
Clearly, there is a saddle-node bifurcation at 𝛾 = 1.