Embed Size (px)
Citation preview

Geometric continuous dynamical decoupling with bounded controls
Pochung ChenDepartment of Physics, National Tsing-Hua University, Hsinchu 100, Taiwan
�Received 27 July 2005; revised manuscript received 26 October 2005; published 24 February 2006�
We develop a framework to implement the dynamical decoupling of open quantum systems using continu-ous pulse sequences. By exploiting the geometric perspective of the continuous dynamical decoupling, weshow that the decoupling pulses can be intuitively designed in the basis of the structure function of the SU�n�corresponding to the control Hamiltonian. Several examples are given to illustrate the basic idea. We argue thatin practice the efficiency of the decoupling is determined by the minimum attainable decoupling cycle time Tc
instead of the order of the discrete decoupling group.
DOI: 10.1103/PhysRevA.73.022343 PACS number�s�: 03.67.Pp, 03.65.Yz, 03.67.Lx
I. INTRODUCTION
Quantum decoherence control has been studied inten-sively in recent years as it represents one of the main ob-stacles in implementing quantum computation. The problemof decoherence, however, remains daunting. Experimentallythere have been rapid advances in the realization of quantumoperations on few level systems. But the fidelity for thosequantum operations, such as Rabi rotation, is typically farbelow the threshold to make the system scalable. To increasethe fidelity, many strategies have been proposed to reduce theundesired effects resulting from the decoherence. Thosestrategies can be roughly grouped into two categories bywhether or not an encoding scheme is used. Some well-known examples, in which encoding is need, include thequantum error-correction codes �QECC� �1–3� and thedecoherence-free subspace �DFS� �4–6�. One of the maindrawbacks of the encoding strategies is the large amount ofancillary space required, especially when the qubit is still arare resource. Therefore, strategies that do not need ancillarysystems become highly desirable. Closed-loop decoherencecontrol �such as quantum feedback control �7–9�� and open-loop decoherence control �such as bang-bang or dynamicaldecoupling �10–13�� fall into this category. To avoid confu-sion, we will use the term bang-bang decoupling to refer tothe typical decoupling scheme originally proposed. Theopen-loop decoherence control typically requires only a lim-ited, a priori, knowledge of the system-environment dynam-ics. Empirical determination of control parameters via quan-tum tomography has also been proposed recently �14�. In thiswork we focus on the dynamical decoupling, but it is ac-knowledged that no single strategy can efficiently eliminatethe problem of decoherence at all levels. Combining or con-catenating different strategies is usually necessary for anyreal physical system.
In the original bang-bang decoupling framework, arbi-trarily strong and instantaneous control pulses are utilized toinduce frequent unitary interruptions during the evolution ofthe system. The stringent requirement on the control Hamil-tonian represents a drawback of the bang-bang decoupling.Experimentally it is impossible to implement arbitrarilystrong and instantaneous pulses in real physical systems. Anultrastrong and fast control pulse will also inevitably inducetransitions to higher energy levels that are usually neglected
in the analysis of the bang-bang decoupling. It is theoreti-cally difficult to describe the evolution with and without con-trol terms simultaneously. This also makes it difficult to es-timate the robustness of the control and the error induced byoperational imperfections. The highly abstract group theoryis also difficult and less intuitive in making the connection tothe realization of the bang-bang decoupling. To alleviate theneed for strong and impulsive control actions, a dynamicaldecoupling using only a bounded-strength Hamiltonian hasbeen recently proposed �15�. Within this framework, thesame group symmetrization is achieved by exploiting theEulerian cycles on a Cayley graph of G �16�, where G is thedecoupling group. On the other hand a complimentary, geo-metric perspective of bang-bang decoupling is proposed toprovide a more intuitive picture and provide a method toestimate implementation errors, �14,17�. In this work we ex-tend the geometric picture of bang-bang decoupling to thecase of continuous decoupling with bounded controls. In thecase of quantum memory, which is an essential ingredient forquantum cryptography �18�, quantum communication �19�,and quantum computation, we show that the decoupling con-dition is equivalent to average out error vectors whose tra-jectories are determined by the control Hamiltonians. Thedecoupling pulses can be intuitively designed by viewing theeffect of a control Hamiltonian from a geometric perspective.In one of the examples we also show that the quantum op-eration could be compatible with the decoupling scheme.The general problem of open-loop controllability of a decou-pled quantum system is beyond the scope of this work andwill be presented elsewhere.
The structure of the paper is the following. In Sec. II, wereview the original bang-bang decoupling, the Eulerian de-coupling, and the geometric perspective of the bang-bangdecoupling. In Sec. III, we present the idea of continuousdynamical decoupling from a geometric perspective. We thenoutline the procedure to design the continuous decouplingpulses. In Sec. IV, several examples are given to illustratehow to construct the decoupling pulses. We summarize inSec. V. The term Eulerian decoupling corresponds to thedecoupling with the bounded Hamiltonian by Viola and Knill�15�, while the term continuous decoupling corresponds tothe version of continuous decoupling from a geometric pic-ture developed in this work.
PHYSICAL REVIEW A 73, 022343 �2006�
1050-2947/2006/73�2�/022343�9�/$23.00 ©2006 The American Physical Society022343-1

II. REVIEW
A. Bang-bang decoupling
First recall the essential ingredient of the bang-bang de-coupling �10–13�. The dynamics of a quantum open systemis determined by the total Hamiltonian
H0 = HS � 1B + 1S � HB + HSB = ��
S� � B�. �1�
Now add a cyclic control Hamiltonian Hc�t�=Hc�t� � 1B
acting on the system alone. The time-evolution operatorUc�t� associated with the control Hamiltonian is periodicover some cycle time Tc�0;
Uc�t� � T exp�− i�0
t
duHc�u� = Uc�t + Tc� , �2�
where T is the time-ordering operator. Let ��t�� be the wavefunction in the interaction representation associated withHc�t�, it is easy to show that
��t�� = T exp�− i�0
t
duH0�u���0�� , �3�
where H0�t�=Uc†�t�H0Uc�t�. Using the periodic condition
Uc�Tc�=1S one finds
��Tc�� = U�Tc���0�� = Uc†�Tc�U�Tc���0�� = ��Tc�� ,
�4�
where U�t�=T exp�−iHt . The stroboscopic dynamics atTN=NTc for the integer N is hence determined by the time-evolution operator
U�Tc� � T exp�− i�0
Tc
duH0�u� . �5�
It is possible to define a kth order average Hamiltonian Hk
by applying the Magnus expansion �20� to U�Tc�, which re-sults in
U�Tc� = e−i�H0+H1+¯�Tc. �6�
In particular we have
H0 =1
Tc�
0
Tc
duH0�u� =1
Tc�
0
Tc
duUc†�u�H0�u�Uc�u� . �7�
Higher-order corrections can also be systematically evalu-ated. In the limit of Tc→0, which is the ideal limit of bang-
bang decoupling, H0 becomes the dominant term. It can beviewed as an effective Hamiltonian governing the strobo-scopic dynamics under a control Hamiltonian. In the follow-
ing we will focus on designing the effective Hamiltonian H0.Denote HS as the finite-dimensional state space associated
with the system. In bang-bang control one identifies a dis-crete decoupling group G= �gj , j= �0, . . . , G−1 , acting onHS via a faithful, unitary, projective representation � suchthat ��G��U�HS�, the unitary matrices acting on HS. Thebang-bang decoupling via G is implemented by assigning
Uc��l−1��t+s�=��gl�, s� �0,�t�, where Tc= G�t, andl= �1, . . . , G . With this assignment the effective Hamil-
tonian H0 becomes H0=��S� � B�, where
S� � �G
�S�� =1
G �gj�G
��gj�†S���gj� . �8�
The nontrivial work is to identify the group G such that for
all � the effective error operator S�=��1S, where �� is a realnumber. Once this is accomplished, the effective Hamil-
tonian H0 is reduced to H0=1S � ����B�. As a result, thesystem is effectively decoupled from the bath.
Note that in this formulation the underlying controlHamiltonian is never explicitly mentioned. An instantaneous,arbitrary strong control Hamiltonian is needed to implementthe desired Uc�t�. Physically, however, it is impossible toimplement such an instantaneous control pulse. An arbitrarystrong control Hamiltonian would also inevitably inducetransition to higher energy states that are neglected when atwo level approximation is used to describe the qubit space.Those unphysical requirements represent some of the maindrawbacks of the original bang-bang decoupling framework.
B. Eulerian decoupling
In order to alleviate the unphysical requirements of theoriginal bang-bang decoupling framework, Viola and Knillpropose a general framework in which the same group sym-metrization can be achieved while using only bounded con-trol Hamiltonians �15�. Given a decoupling group G and itsgenerating set F= �f� , �=1, . . . , F. We assume that f� isattainable by applying some control Hamiltonian h��t� over aperiod of time �t,
f� = T exp�− i�0
�t
duh��u�, � = 1, . . . , F . �9�
If we image each group element gi�G as a vertex, then f�
can be imaged as the directional, colored edge connectingthe vertices. If g�= f�g, then we draw a line from point g topoint g� with color �. An Eulerian cycle is defined as a cyclethat uses each edge exactly once. In this case, one can showthat it is always possible to find a Eulerian cycle, having thelength L= GF �16�. A well-defined Eulerian cycle begin-ning at the identity g0 of G can be uniquely specified by thesequence of the edge colors used, PE= �p1 , p2 , . . . , pL�, wherepl�F. An Eulerian decoupling is then implemented by let-ting Tc=L�t and by assigning Uc�t� as follows:
Uc�t���l − 1��t + s� = ul�s�Uc��l − 1��t� , �10�
where s� �0,�t�, and ul�s�=T exp�−i�0sduhl�u� , ul��t�
=��pl�. Here � stands for the projective representation of the
decoupling group. In this way the average Hamiltonian H0
becomes H0=��S� � B�, where
POCHUNG CHEN PHYSICAL REVIEW A 73, 022343 �2006�
022343-2

S� =1
FG�t�
0
FG�t
duUc†�t�H0�t�Uc�t�
=�gj�G
GF�t��gj�†��
�=1
F �0
�t
dtu�†�t�S�u��t���gj� .
�11�
It can be shown that the same decoupling can be achievedthrough this average �15�. Assuming that �t remains thesame as in the Eulerian decoupling, the length of the Eule-rian decoupling is lengthened by a factor of F compared tothe bang-bang decoupling. Eulerian decoupling provides aguideline to designing the control Hamiltonian if the decou-pling group and its representation is known. The search forthe decoupling group, however, remains a nontrivial work.
C. The geometric perspective of the bang-bangdecoupling
Bang-bang decoupling and Eulerian decoupling schemesmake heavy use of the abstract group theory. In recent yearsa complementary geometric perspective was developed toprovide a more intuitive picture �17�. The geometric pictureof the bang-bang decoupling utilizes the homomorphicmapping between the Lie group SU�n� and SO�N�, whereN=n2−1. Let �i, i=1, . . . ,N be the N traceless, Hermitiangenerators of SU�n�. The generators �� j satisfy trace-orthogonality Tr��i� j�=M�ij, where M is a normalizationconstant. For any group element U�SU�n�, one can define arotation R�SO�N� via
U†�iU = �j=1
N
R�U�ij� j . �12�
This defines a homomorphism from SU�n� to a subgroup ofSO�N�.
For simplicity and without loss of generality we will writeH0=��S� � B�, where S� is traceless. Note that any tracelesssystem operator S��SU�n� can be expanded in terms of � j,yielding
S� = �i
�s��i�i � s�� · �� , �13�
where �s��i= �1/M�Tr��iS��. In other words, a traceless sys-tem operator can be represented by an N-dimensional vector.Using this result the Hamiltonian H0 can be written as fol-lows:
H0 = ��
S� � B� = ��
�s�� · �� � � B�, �14�
where s�� is a vector of length N. In the following we shouldrefer to s�� as error vectors. By using error vectors to repre-sent the system-bath Hamiltonian HSB, the decoupling bysymmetrization over a group G with projective representation��gi� can be viewed as an average over rotated error vectors.
Following this line the average Hamiltonian H0 becomes
H0 = ��
1
G �g�G��g�†S���g� � B�
= ��
�j� 1
G �g�G�
i
R†���g�� ji�s���i� j � B�
= ��
�s��� · �� � � B�, �15�
where the average error vector s��� equals
s��� =1
G �g�G�
i
R†���g�� ji�s���i =1
G �g�GR†���g��s��.
�16�
From the geometric perspective the decoupling condition�in the case of quantum memory� is equal to require that theaverage error s��� be zero for all �. Geometrically, each termin the group symmetrization procedure corresponds to aneffective rotation R†���g���SO�N� on all error vectors. It isevident, however, that the error vector can be averaged tozero by a set of rotations that do not correspond to the rep-resentation of some decoupling groups. It is therefore in-triguing to discuss if a underlying group structure is neces-sary to achieve dynamical decoupling.
III. CONTINUOUS DECOUPLING FROM A GEOMETRICPERSPECTIVE
One of the main goals of this section is to develop ageometric continuous decoupling theory of which the bang-bang and the Eulerian decoupling can be viewed as a limit-ing case. Another goal is to develop a constructive frame-work to design the continuous decoupling pulses. Thegeometric picture of the bang-bang decoupling is intuitivebut it has the same drawback that the bang-bang decouplinghas, i.e., the error vector is instantaneously rotated to anothervector by some rotation. This drawback can be alleviated if abounded control Hamiltonian is used to continuously rotatethe error vector. We thus seek to formulate a framework forcontinuous dynamical decoupling from a geometric perspec-tive. Recall that the average Hamiltonian has the followingexpression:
H0 =1
Tc�
0
Tc
duUc†�u�H0�u�Uc�u� = �
�
S� � B�. �17�
Now instead of piecewise mapping Uc�t� into the represen-tation of the decoupling group, one represents the effective
system operator S� by its corresponding average error vectors���. The average error vector can be expressed as the timeaverage over the trajectory of the error vector rotated byR†�Uc�,
GEOMETRIC CONTINUOUS DYNAMICAL DECOUPLING¼ PHYSICAL REVIEW A 73, 022343 �2006�
022343-3

S� =1
Tc�
0
Tc
duUc†�u�S�Uc�u�
=1
Tc�
0
Tc
du�i
�s��iUc†�u��iUc�u�
=1
Tc�
0
Tc
du�ij
�s��iR�Uc�u��ij� j
= �j� 1
Tc�
0
Tc
du�i
R†�Uc�u�� ji�s��i� j
= s��� · �� , �18�
where
�s��� j =1
Tc�
0
Tc
du�i
R†�Uc�u�� ji�s��i �19�
or, using vector notation,
s��� =1
Tc�
0
Tc
duR†�Uc�u��s��. �20�
It is then evident that when s���=0 for all �, the system isdecoupled from the environment. In this case the system be-haves as an ideal quantum memory. The decoupling pulsesalso result in some restrictions in our ability to further ma-nipulate the system dynamics. However, as it will be shownin one of the examples, the quantum manipulation and con-tinuous decoupling are compatible in some cases. The gen-eral problem of open-loop controllability of a decoupledquantum system is beyond the scope of this work and will bepresented elsewhere. Note also that Uc is not required tocorrespond to the representation of the decoupling group butthe Eulerian decoupling can be easily recovered as a limitingcase.
In order to develop a constructive framework to designthe continuous decoupling pulses, it is instructive to investi-gate how the error vectors are steered by the control Hamil-tonian, especially when the control Hamiltonian is propor-tional to one of the generators of SU�n�. First, define a time-dependent error vector via
s� · Uc†�t���Uc�t� � s��t� · �� . �21�
The ith component of s��t� can be expressed as
si�t� =1
MTr��is� · Uc
†�t���Uc�t� . �22�
Assuming that Hl�t�=al�t��l, where al�t� represents the enve-lope function of the control pulse, one finds
d
dtMsi�t� = Tr��iial�t��ls� · Uc
†�t���Uc�t�
+ Tr��is� · Uc†�t���Uc�t��− ial�t����l�
= ial�t�Tr��i��l,�j
sj�t�� j�= ial�t��
j
sj�t�Tr��ii�k
f ljk�k= ial�t��
j
i f ljisj�t�
� − ial�t��Ll�ijsj�t� , �23�
where we have defined
�Ll�ij = − if lji = + if lij , �24�
and f ijk is the structure function of SU�n�. From the SO�N�point of view, the effect of control Hamiltonian al�t��l is toinduce a rotation with the generator Ll and with the speedal�t�. It is thus useful to express Li in terms of the naturalgenerators of SO�N�. The natural generators of SO�N� areantisymmetric Hermitian matrices L�, where � ,=1, . . .N,whose components have the form
�L��ij = − i���i�j − ��j�i� . �25�
We will restrict ourself to � as a convention and to avoiddouble counting. They satisfy the commutation relation
�L�,L���� = − i����L�� − ����L� + ��L��� − ���L��� ,
�26�
and the trace orthogonality condition
Tr�L�L���� = M������. �27�
In other words, giving a control Hamiltonian of the formal�t��l, in the geometric picture it corresponds to a time-independent rotation generator Ll and time-dependent enve-lope function al�t� representing the time-dependent speed ofthe rotation. By expressing Ll in terms of the natural genera-tors of SO�N�
Ll = ��
X�L�, �28�
a compact notation of the form
��l,�� � = ���
X�L���� �29�
can be used to represent the effect of control Hamiltonian �l.Given an error vector s�, any 2� rotation in a plane contain-ing s� can average this error to zero. For example, forSU�3�→SO�8� one has
��3,�� � = �− 4L12 + 2L45 + 2L76��� . �30�
It immediately leads us to the conclusion that �3 can be usedto average any vector in the 1-2 plane to zero with an appro-priate envelope function. In the Appendix we explicitly
POCHUNG CHEN PHYSICAL REVIEW A 73, 022343 �2006�
022343-4

calculate the ��l ,�� � for SU�2�, SU�3�, and SU�4�. Those re-sults will be used in the examples presented in the next sec-tion.
The analysis above leads us to the following frameworkof designing continuous decoupling pulses which can be out-lined as follows: The first step is to calculate the error vec-tors using the system-bath Hamiltonian. Giving ann-dimensional system, the second step is to represent thestructure function of SU�n� in the compact form in Eq. �29�.It is then straightforward to identify the useful controlHamiltonian �l. The third and final step is to design a properenvelope function a�t� to average all error vectors to zero.The form and maximal strength of the envelope functionmight be limited by the control resources available, which inturn set a minimum Tc attainable.
Continuous decoupling is robust against implementationimperfection because a small implementation error on thecontrol Hamiltonian will only result in a small deviation ofthe average error vectors from their ideal values. The imple-mentation error can be evaluated via the distance betweenthe ideal average error vector and the real average error vec-tors. Let s���,id be ideal average error vectors resulting from aperfect control Hamiltonian whereas s��� will be the real av-erage error vectors resulting from an imperfect controlHamiltonian. The Euclidean distance between two vectorsd�s���,id ,s�������s���,id−s���� · �s���,id−s���� can be used to quan-tify the implementation error.
To be more precise, imagine that the real control Hamil-tonian Hc�t� deviates from the ideal control HamiltonianHc
id�t� by �Hc�t�, i.e.,
Hc�t� = Hcid�t� + �Hc�t� . �31�
We write the corresponding evolution operator as,
Uc�t� � Ucid�t��1 + �Uc�t�� , �32�
where �Uc�t�→0 when �Hc�t�→0. We are interested in thecase in which �Hc�t� is small in some measure, this trans-lates to the smallness of �Uc�t� in some unspecified measure.The time-dependent error vector under faulty control be-comes
si�t� =1
MTr��is� · Uc
†�t���Uc�t�
�1
MTr��is� · Uc
id,†�t���Ucid�t�
+1
MTr��is� · �Uc
†�t�Ucid,†�t���Uc
id�t� + H.c.
+ O���Uc�t��2� , �33�
where ��Uc�t�� denotes the norm of �Uc�t�. The error in-duced by the faulty control, which is quantified by the dis-tance between the ideal and the real average error vectorsbecomes
d2�s�id� ,s��� � �0
Tc dt�i
MTc�Tr��is� · �Uc
†�t�R†�Ucid�t���� + H.c. �2
� F��s�,Ucid�t�����Uc�t��2, �34�
where F is a functional of s� and Ucid�t�. In other words the
error d�s�id� ,s��� is proportional to ��Uc�t��2 which is smallprovided that the deviation from the ideal control Hamil-tonian is small. The analysis proves the robustness of thecontinuous decoupling. When encoding into a subsystem isused the scheme may become even more robust. But we willnot discuss encoding-related issues here �13,15�.
IV. EXAMPLES
In this section we study several examples to illustrate howto apply the designing procedure outlined in the precedingsection to various decoherence models.
A. Single qubit spin-flip decoherence
Consider first a single qubit with a single error operator,�S� = � z . In a geometric picture it corresponds to a singleerror vector s�= �0,0 ,1�. Intuitively, performing any 2� rota-tion in a plane containing the error vector s� should averagethe error vector to zero. Using the results in the Appendix itis easy to verify that one can choose the control Hamiltonianto be proportional to �1�= x� or �2�= y�. From the geometricperspective, this corresponds to rotate the error vector in thex-z or y-z plane using the SO�3� generator L13 or L23. If weare to choose y and assume that Hc�t�=a�t� y, the time-dependent error vector becomes
s��t� = e−i�0t du2a�u�L13s��0� = e−iA�t�L13s��0� , �35�
where A�t�=�0t dua�u�. The decoupling condition can be writ-
ten as
1
Tc�
0
Tc
due−i2A�u�L13s��0� = 0� . �36�
The decoupling condition can be satisfied very generally byrequiring that
e−2A�Tc/2�L13 = R��, y� , �37�
and
2A�Tc/2 + t� = � + 2A�t�,t = �0,Tc/2� , �38�
where R�� , y� represents a � rotation around y axis. Geo-metrically this corresponds to rotating the error vector from s�to −s� at some speed controlled by a�t�, and rotating it back tos� with the same speed profile. The first condition ensures thatthe error vector is steered to −s� at half time t=Tc /2. Thesecond condition ensures that the contribution from the sec-ond half cancels exactly the contribution from the first half,resulting in a zero average error vector.
It is worth studying the connection between the continu-ous decoupling pulses prescribed here and the bang-bangdecoupling pulses. The connection also provides a
GEOMETRIC CONTINUOUS DYNAMICAL DECOUPLING¼ PHYSICAL REVIEW A 73, 022343 �2006�
022343-5

foundation to compare the efficiency. It is known that theminimum bang-bang decoupling group for this problem isthe group Z2= �e ,g where g2=e. The corresponding repre-sentation can be chosen to be either ���e�=1 ,��g�= x or ���e�=1 ,��g�= y . It is easy to show that a largergroup C4= �e ,g2 ,g3 ,g3 , where g4=e, can achieve thesame decoupling. The corresponding representation is���e�=1 ,��g�=r ,��g2�=r2 ,��g2�=r3 where r is the � /2rotation along the x direction. To see how these two bang-bang decouplings can be viewed as special cases of the con-tinuous decoupling we need to understand the effects of ��g�from the geometric perspective. For Z2 decoupling the effectof ��g� is to rotate instantaneously the error vector s� to −s�while for C4 decoupling the effect of ��g� is to rotate instan-taneously the error vector by � /2 at each kick.
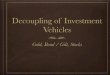
Based on this observation one can design envelope func-tions to mimic the Z2 and C4 bang-bang decoupling, respec-tively. For Z2 decoupling the envelope function a�t� shouldconsist of two narrow width and large amplitude Gaussianpulses centered at t=0 and t=Tc /2. The pulse area is ad-justed so that a � rotation of error vector is accomplished atthe end of each pulse. For C4 decoupling a�t� should consistof four narrow width and large amplitude Gaussian pulsescentered at t=0, Tc /4, 2Tc /4, and 3Tc /4. The pulse area isadjusted so that a � /2 rotation of error vector is accom-plished at the end of each pulse. The amplitude in C4 decou-pling shall be smaller than the one in Z2 decoupling if onekeeps the pulse width the same. The ideal bang-bang decou-pling is recovered when the pulse width approaches zero. Inshort a continuous decoupling pulses can always be designedto approach any bang-bang decoupling if there is no limit onthe strength achievable. It is more flexible in designing thecontinuous decoupling pulses. For example, the envelopefunction a�t� can consist of two wider width and smalleramplitude Gaussian pulses centered at t=Tc /4 andT=3Tc /4 or consist of four Gaussian pulses centered att=0, Tc /4, 2Tc /4, and 3Tc /4, respectively. In Fig. 1 we sche-matically plot the decoupling pulses for those cases.
In bang-bang decoupling it is typical to assume that thedecoupling pulse is �-like and no limit is set for the attain-able Tc. Since a larger decoupling group would need morekicks to finish the cycle the order of the decoupling groupdetermines the efficiency of the bang-bang decoupling. Inpractice, however, the width and amplitude of the pulse arelimited by the control resource. Therefore there is a limit onattainable Tc and it becomes inappropriate to use the order ofthe decoupling to determine the efficiency. Since bang-bangdecoupling can always mimic by a continuous pulse whoseminimum Tc is constrained by the control resource, we arguethat the minimum Tc attainable should be used to determinethe efficiency of the decoupling scheme. When Tc is finitethe effect of higher terms in the Magnus expansion cannot betotally neglected. The effects of higher order terms dependson the details of the environment �22�. A detailed calculationis beyond the scope of this manuscript and will not be dis-cussed here.
B. Single qubit full decoherence
Next consider a single qubit with all possible error opera-tors, �S� = � x , y , z . In the geometric picture they corre-
spond to three error vectors s�1= �1,0 ,0�, s�2= �0,1 ,0�, ands�3= �0,0 ,1�. A 2� rotation in a plane containing both thevectors s�1 and s�2 can average both error vectors to zero, buts�3 will remain unchanged. It is possible, however, to design asequence which averages all three error vectors to zero. Tosee how such a pulse sequence can be constructed, first recallthat in the previous example the vector s�i�t� must reach −s�i
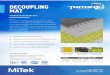
during the decoupling operation. We thus seek to rotate s�i to−s�i using alternating generators, in the hope that the residualerrors will cancel each other when a full decoupling cycle isfinished. Using this idea it is straightforward to construct andverify that a sequence of � rotations using following genera-tors ��1 ,�3 ,�1 ,�3 ,�3 ,�1 ,�3 ,�1 can average all three errorvectors to zero. In Fig. 2 we plot the trajectories of threeerror vectors during the decoupling sequence. It is evident
FIG. 1. The Gaussian envelope function and � function-likebang-bang envelope function for �a� Z2 decoupling, �b� C4 decou-pling, and �c� continuous decoupling. In �c�, the solid line and dot-ted line represent two possible envelope functions as described inthe text.
FIG. 2. Trajectories of error vectors under the decoupling se-quence described in example B. It is assumed that the envelopefunction in each subperiod is the same.
POCHUNG CHEN PHYSICAL REVIEW A 73, 022343 �2006�
022343-6

from the figure that a judicial envelope function will ensurethat all time integrals of error vectors are zero.
The decoupling pulse sequence designed here is equiva-lent to the Eulerian decoupling prescribed in Ref. �15� whensome appropriate envelope function is used. Due to the na-ture of the Eulerian cycle there is a factor of F overheadwhen compared to the bang-bang decoupling. However, aspointed out in the previous example the efficiency consider-ation should be based on the continuous decoupling frame-work. Since this overhead has no impact on the attainable Tcwe should again resort to attainable Tc to determine the effi-ciency. In Ref. �17�, an example is given to demonstrate thata decoupling group may not be necessary to achieve the de-coupling condition. From the geometric picture of the bang-bang decoupling it suffices to rotate instantaneously the errorvectors to the vertexs of a tetrahedron. From a continuousdecoupling point of view, it is evident that for this kind ofdecoupling sequence the residual errors will accumulatewhen the error vectors are rotated from one vertex to another.It is difficult to cancel these residuals systematically using adesign similar to what has been done in this example. Even ifit is accomplished, it would represent a less optimal solution.We thus argue that a decoupling group is not necessary toachieve continuous dynamical decoupling, but a decouplinggroup usually provides a guideline to design the optimal con-tinuous decoupling sequence.
C. Two qubits independent decoherence
The decoupling pulses in the previous two examples re-sult in an ideal quantum memory. It is intriguing to investi-gate if the decoupling pulses can be compatible with theHamiltonian used to perform quantum manipulation. Inmany solid-state qubits, a Heisenberg exchange is utilized toimplement the quantum operations. In this example wewould like to show that for a two qubit system with indepen-dent dephasing error operators it is possible to design a com-patible decoupling pulse. For independent decoherence thesystem-bath Hamiltonian has the form,
HSB = g1� z � 1� � B1 + g2�1 � z� � B2. �39�
The Hamiltonian corresponds to two error vectors s�1=g1��3
and s�2=g2��6. Any rotation in SO�15� which can rotate botherror vectors by 2� should effectively decouple the systemfrom the dephasing error. On the other hand in terms of Paulimatrices the Heisenberg interaction is written as
Hex = J x � x + J y � y + J z � z. �40�
In other words, the Heisenberg interaction corresponds to
three vectors ��7, ��11, and ��15 from the geometric perspective.A decoupling sequence compatible with the Heisenberg in-teraction should average error vectors to zero while leavingthose three vectors in tact. Using the results in the Appendixit is obvious that one should avoid using the generators�1¯�6, �8¯�9, and �12¯�14, which either cannot averageerror vectors to zero or have undesirable side effects on theHeisenberg interaction. This leaves us to the only choice of�7, �11, and �15. It is then easy to verify that any one of those
three generators can be used as the control Hamiltonian toaverage out the dephasing error with an appropriately de-signed envelope function a�t� while leaving the Heisenberginteraction in tact.
D. One qubit with one ancilla level
Our final example consists of a three level system inwhich the first two levels 1�, 2� are used as the qubit spacewhile the third level 3� is used as an ancilla level used toimplement a quantum operation in qubit space. We assumethat all three levels are coupled to the environment, with thefollowing system-bath Hamiltonian:
HSB = g1�1��1 − 2��2� � B1 + g2�1��3 + 3��1� � B2
+ g3�2��3 + 3��2� � B3. �41�
This system-bath Hamiltonian corresponds to three error
vectors s�1=��3, s�2=��4, and s�3=��6. By consulting theSU�2�→SO�8� mapping in the Appendix it is easy to showthat all three error vectors can be averaged to zero via thegenerator �2. This simple example illustrates that the con-tinuous dynamical decoupling from geometric perspectivecan be straightforwardly applied not only to the logical qubitspace but also the physical qubit space or the larger space inwhich the physical qubit space is embedded in.
V. SUMMARY AND DISCUSSION
In summary we have developed a framework to imple-ment the dynamical decoupling of open quantum systemsusing continuous pulse sequences. The need to perform un-physical, arbitrarily strong, and fast control is eliminated andbang-bang control can be viewed as an unphysical limit ofthe continuous decoupling in which the control Hamiltonianis unbounded. By exploiting the geometric perspective of thecontinuous decoupling one can visualize how the time-dependent error vectors are steered by the control Hamil-tonian. We have shown that the decoupling pulses can beintuitively designed by expressing control Hamiltonian interms of the generators of SU�n� and utilize the structurefunction of SU�n�. Several examples have been given to ex-plicitly illustrate how to design the decoupling sequencesstarting from a given system-bath Hamiltonian. We also haveshown that since in practice there is always a limit on thestrength of the control Hamiltonian, the minimum attainableTc is better suited to represent the efficiency. It should benoted that when Tc is finite, higher order terms in Magnusexpansion cannot be totally neglected. It is, however, stillsensible to use Tc to represent the efficiency. Elaborated cal-culations on the effects of higher order terms will depend onthe detail of the environment and it is not the primary interestof this work. The framework is not restricted to physicalqubit space or logical qubit space. The ancilla levels or otherrelevant nearby levels can be naturally included in the analy-sis. This is important especially when ancilla levels areneeded to perform a quantum operation or when the nearbylevels cannot be neglected.
GEOMETRIC CONTINUOUS DYNAMICAL DECOUPLING¼ PHYSICAL REVIEW A 73, 022343 �2006�
022343-7

When the decoupling pulses average all error vectors tozero the system is effectively decoupled from the environ-ment, resulting in an ideal quantum memory. Under the de-coupling pulses our ability to further manipulate the systemis restricted. However, as illustrated in one of the examples itis sometimes possible to design decoupling pulses which arecompatible with the Hamiltonian used to perform quantummanipulation. The general problem of open-loop controlla-bility of a decoupled quantum system with or without encod-ing is beyond the scope of this work and shall be discussedelsewhere. It is also intriguing to discuss the issue of optimalcontrol. In a typical bang-bang decoupling framework a de-coupling group is identified, assuming that the correspondingtime evolution operators can be implemented. In a real sys-tem, however, the possible control Hamiltonian at our dis-posal might be limited and the desired time evolution opera-tors might not be achievable. It is thus natural to ask thecomplementary question: Giving a set of possible controlHamiltonian, what is the optimal decoupling sequence? Thegeometric continuous decoupling framework developed hereis suitable to answer this question. As the simplest example,consider the case where some of the generators of SU�n�cannot be used as the control Hamiltonian. In such a case,one can use the remaining generators and their correspond-ing rotations to construct a �sub�optimal decoupling se-quence.
Recently there have been efforts to unify the dynamicaldecoupling and the quantum Zeno effect �20,21�. Roughlyspeaking bang-bang control and quantum Zeno effect bothrequire a strong intervention in a quantum system. This ideashared by the above schemes leads to the possible unifica-tion. It is therefore very interesting to see if the continuousdecoupling scheme in which the arbitrarily strong pulses arenot necessary can still be connected to the quantum Zenoeffect.
APPENDIX: SU„n… and SO„N…
In this appendix we explicitly calculate the correspon-dence between the generators of SU�n� and the natural gen-erators of SO�N� where N=n2−1 using the procedure out-lined in Sec. III. We adapt the following convention for thenatural generators of SO�N�:
�L��ij = − i���i�j − ��j�i� , �A1�
where �. Note that the choice of the generators of SU�n�is not unique. Unitary transformation on a set of generatorsresults in another set of generators. However this onlyamounts to a rotation on error vectors and the basis vectorsof SO�N�.
1. SU(2) and SO(3)
Let �1= x, �2= y, and �3= z be the three generators ofSU�2�. They satisfy the trace orthogonality
Tr��i� j� = 2�ij . �A2�
It is easy to verify that
��1,�� � = + 4L23�� , �A3�
��2,�� � = − 4L13�� , �A4�
��3,�� � = + 4L12�� . �A5�
2. SU(3) and SO(8)
A standard set of generators of the SU�3� are the Gell-Mann matrices
�1 = �0 1 0
1 0 0
0 0 0�, �2 = �0 − i 0
i 0 0
0 0 0�, �3 = �1 0 0
0 − 1 0
0 0 0� ,
�A6�
�4 = �0 0 1
0 0 0
1 0 0�, �5 = �0 0 − i
0 0 0
i 0 0�, �6 = �0 0 0
0 0 1
0 1 0� ,
�A7�
�7 = �0 0 0
0 0 − i
0 i 0�, �8 =
1�3�1 0 0
0 1 0
0 0 − 2� . �A8�
They satisfy the trace orthogonality
Tr��i� j� = 2�ij . �A9�
Using this set of generators one can verify the followingrelations:
��1,�� � = �+ 4L23 + 2L47 − 2L56��� ,
��2,�� � = �− 4L13 + 2L46 + 2L57��� ,
��3,�� � = �− 4L12 + 2L45 − 2L76��� ,
��4,�� � = �+ 2L17 + 2L26 + 2L35 − 2�3L58��� ,
��5,�� � = �+ 2L16 + 2L27 + 2L34 − 2�3L84��� ,
��6,�� � = �− 2L15 − 2L24 + 2L37 + 2�3L78��� ,
��7,�� � = �+ 2L14 + 2L25 + 2L36 + 2�3L68��� ,
��8,�� � = �+ 2�3L45 + 2�3L67��� . �A10�
3. SU(4) and SO(15)
For SU�n� where n is a power of 2, it is convenient to usethe product of Pauli matrices to form the generator of SU�n�.
POCHUNG CHEN PHYSICAL REVIEW A 73, 022343 �2006�
022343-8

We hence use the following assignment for the generators ofSU�4�:
�1 = 1 � 1, �2 = 2 � 1, �3 = 3 � 1 , �A11�
�4 = 1 � 1, �5 = 1 � 2, �6 = 1 � 3,
�7 = 1 � 1, �8 = 1 � 2, �9 = 1 � 3,
�10 = 2 � 1, �11 = 2 � 2, �12 = 2 � 3,
�13 = 3 � 1, �14 = 3 � 2, �15 = 3 � 3.
�A12�
The generators satisfy the trace orthogonality
Tr��i� j� = 4�ij . �A13�
By matrix manipulation one can verify that the followingrelations holds:
��1,�� � = �+ 8L2,3 + 8L10,13 + 8L11,14 + 8L12,15��� ,
��2,�� � = �− 8L1,3 − 8L7,13 − 8L8,14 − 8L9,15��� ,
��3,�� � = �+ 8L1,2 + 8L7,10 + 8L8,11 + 8L9,12��� ,
��4,�� � = �+ 8L5,6 + 8L8,9 + 8L11,12 + 8L14,15��� ,
��5,�� � = �− 8L4,6 − 8L7,9 − 8L10,12 − 8L13,15��� ,
��6,�� � = �+ 8L4,5 + 8L7,8 + 8L10,11 + 8L13,14��� ,
��7,�� � = �+ 8L2,13 − 8L3,10 + 8L5,9 − 8L6,8��� ,
��8,�� � = �− 8L2,14 − 8L3,11 − 8L4,9 + 8L6,7��� ,
��9,�� � = �+ 8L2,15 − 8L3,12 + 8L4,8 − 8L5,7��� ,
��10,�� � = �− 8L1,13 + 8L3,7 + 8L5,12 − 8L6,11��� ,
��11,�� � = �− 8L1,14 + 8L3,8 − 8L4,12 + 8L6,10��� ,
��12,�� � = �− 8L1,15 + 8L3,9 + 8L4,11 − 8L5,10��� ,
��13,�� � = �+ 8L1,10 − 8L2,7 + 8L5,15 − 8L6,14��� ,
��14,�� � = �+ 8L1,11 − 8L2,8 − 8L4,15 + 8L6,13��� ,
��15,�� � = �+ 8L1,12 − 8L2,9 + 8L4,14 − 8L5,13��� .
ACKNOWLEDGMENT
We acknowledge the support of the National ScienceCouncil in Taiwan through Grant No. NSC 94-2112-M-007-018.
�1� P. W. Shor, Phys. Rev. A 52, R2493 �1995�.�2� A. M. Steane, Phys. Rev. Lett. 77, 793 �1996�.�3� E. Knill and R. Laflamme, Phys. Rev. A 55, 900 �1997�.�4� P. Zanardi and M. Rasetti, Phys. Rev. Lett. 79, 3306 �1997�.�5� L.-M. Duan and G.-C. Guo, Phys. Rev. Lett. 79, 1953 �1997�.�6� D. A. Lidar, I. L. Chuang, and K. B. Whaley, Phys. Rev. Lett.
81, 2594 �1998�.�7� H. M. Wiseman and G. J. Milburn, Phys. Rev. Lett. 70, 548
�1992�.�8� A. C. Doherty and K. Jacobs, Phys. Rev. A 60, 2700 �1999�.�9� C. Ahn, A. C. Doherty, and A. J. Landahl, Phys. Rev. A 65,
042301 �2002�.�10� L. Viola, E. Knill, and S. Lloyd, Phys. Rev. Lett. 82, 2417
�1999�.�11� L. Viola, S. Lloyd, and E. Knill, Phys. Rev. Lett. 83, 4888
�1999�.�12� P. Zanardi, Phys. Lett. A 258, 77 �1999�.
�13� L. Viola, E. Knill, and S. Lloyd, Phys. Rev. Lett. 85, 3520�2000�.
�14� M. S. Byrd and D. A. Lidar, Phys. Rev. A 67, 012324 �2003�.�15� L. Viola and E. Knill, Phys. Rev. Lett. 90, 037901 �2003�.�16� B. Bollobás, Modern Graph Theory �Springer-Verlag, Berlin
1998�.�17� M. S. Byrd and D. A. Lidar, Quantum Inf. Process. 1, 19
�2002�.�18� L. Goldenberg and L. Vaidman, Phys. Rev. Lett. 75, 1239
�1995�.�19� Quantum Communication, Computing, and Measurement, ed-
ited by O. Hirota, A. S. Holevo, and C. M. Caves �PlenumPress, New York, 1997�.
�20� W. Magnus, Commun. Pure Appl. Math. 7, 649 �1954�.�21� P. Facchi, D. A. Lidar, and S. Pascazio, Phys. Rev. A 69,
032314 �2004�.�22� K. Shiokawa and B. L. Hu, e-print quant-ph/0507177.
GEOMETRIC CONTINUOUS DYNAMICAL DECOUPLING¼ PHYSICAL REVIEW A 73, 022343 �2006�
022343-9