Embed Size (px)
Citation preview
Geometric and Semantic 3D Reconstruction:
Part 4A: Volumetric Semantic 3D Reconstruction
CVPR 2017 Tutorial
Christian Häne
UC Berkeley

Dense Multi-View Reconstruction
• Goal: 3D Model from Images (Depth Maps)
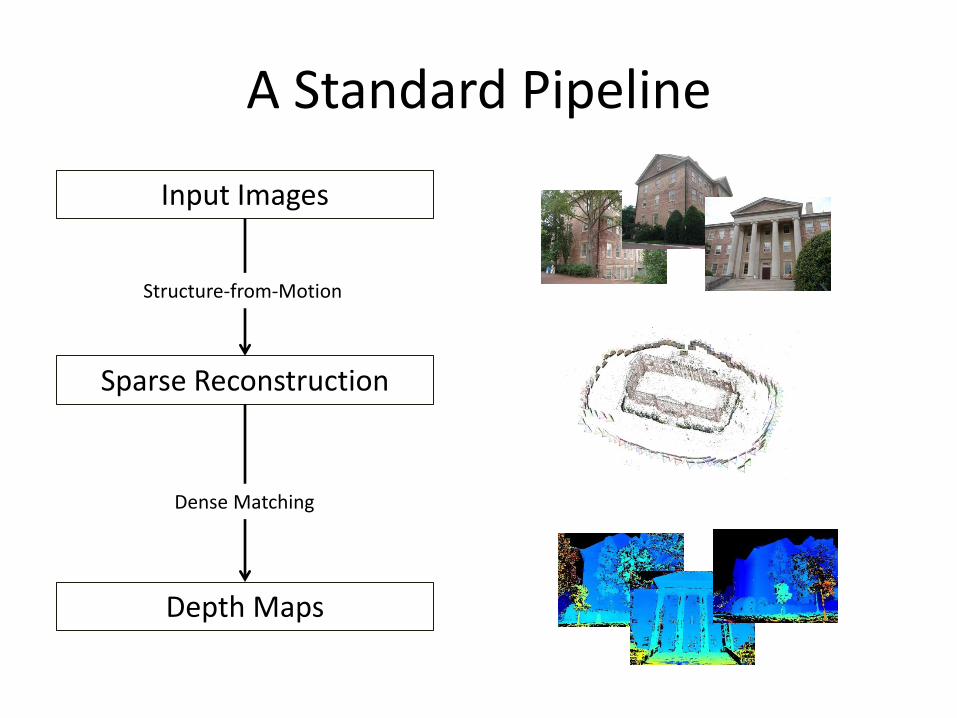
A Standard Pipeline
Input Images
Sparse Reconstruction
Structure-from-Motion
Depth Maps
Dense Matching
red close, blue far
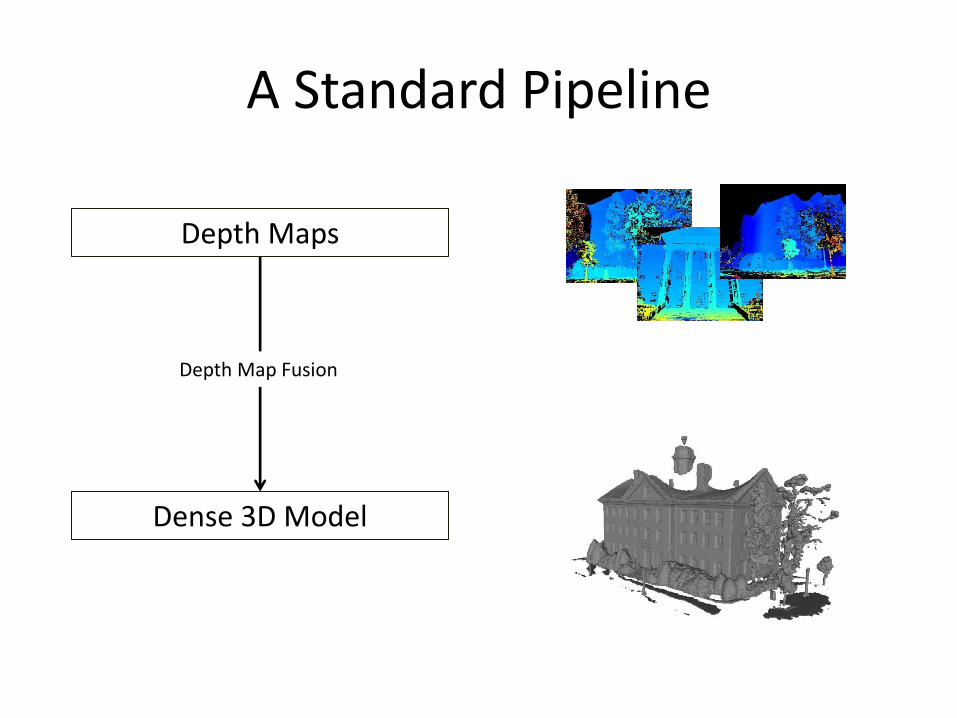
A Standard Pipeline
Depth Maps
Dense 3D Model
Depth Map Fusion
Challenges
• Noise in Depth Maps
• Inconsistencies Between Views
• Incomplete Data
• Mistakes in Depth Maps
Domain / Representation
• Volume
– Outside / Inside
• Mesh
– Triangles Representing the Surface
• Surface Element (Surfel)
– Dense Set of Small Disks
• ….

Truncated Signed Distance Field (TSDF) [Curless & Levoy, 1996, Levoy et al. 2000]
• Weighted Average over Multiple Viewpoints
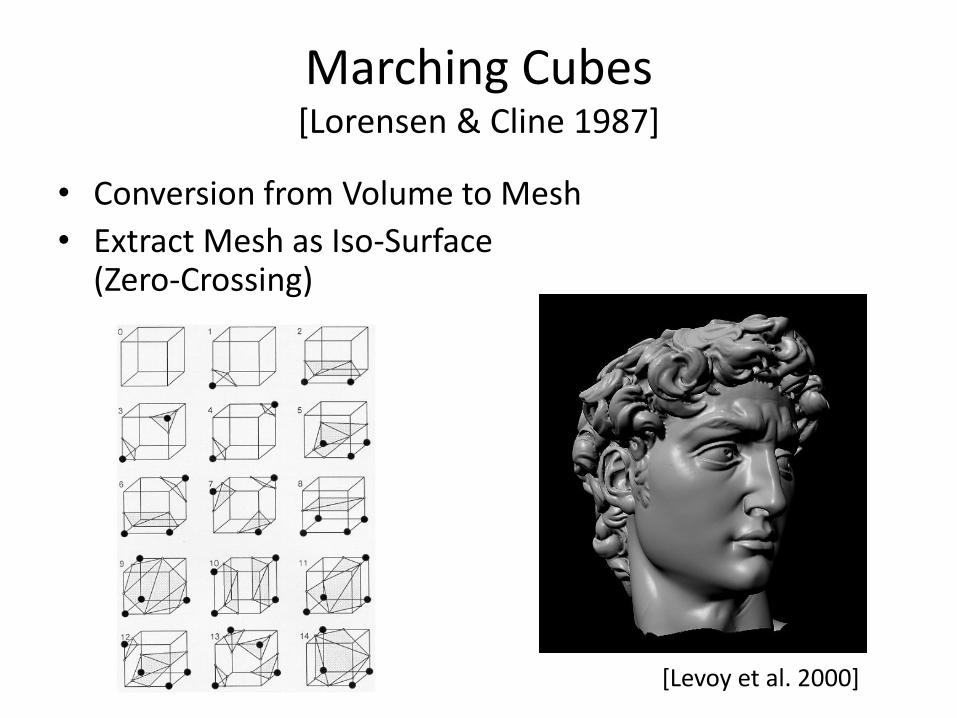
Marching Cubes [Lorensen & Cline 1987]
• Conversion from Volume to Mesh
• Extract Mesh as Iso-Surface (Zero-Crossing)
[Levoy et al. 2000]
Real-Time on GPU [Newcombe et al. 2011]
• Input: Depth Cameras (Kinect)
Regularization
• Noise and Outliers
• Energy minimization
– Data Term
– Smoothness Term
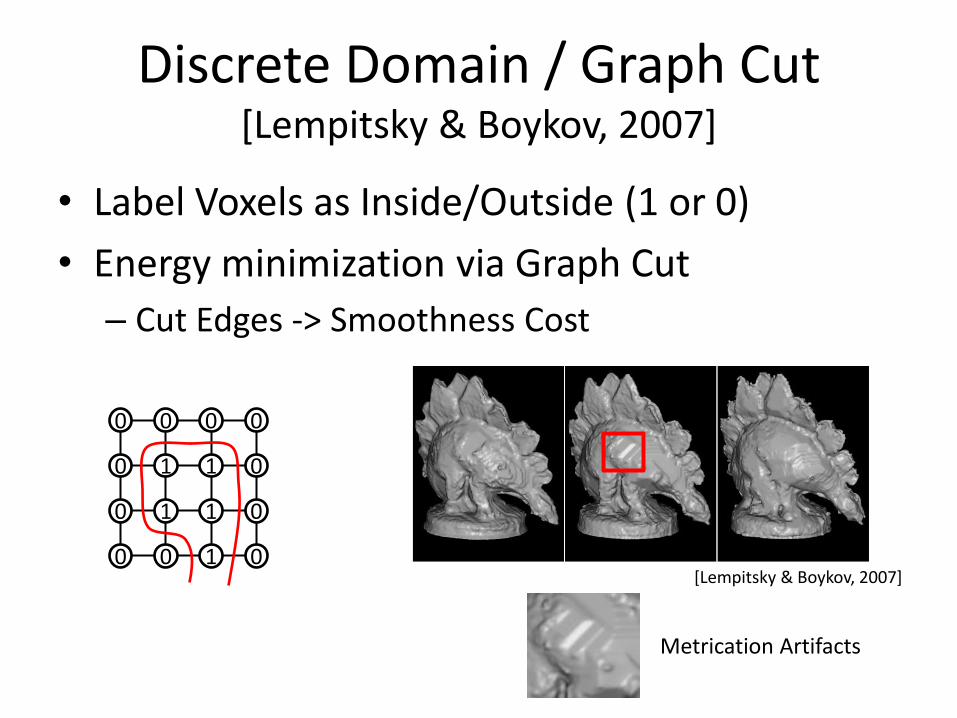
Discrete Domain / Graph Cut [Lempitsky & Boykov, 2007]
• Label Voxels as Inside/Outside (1 or 0)
• Energy minimization via Graph Cut
– Cut Edges -> Smoothness Cost
0 0 0 0
0 1 1 0
0 1 1 0
0 0 1 0 [Lempitsky & Boykov, 2007]
Metrication Artifacts

Continuous Domain / Variational
• Segment Continuous Domain Inside/Outside
• Variational Optimization
– Total Variation as Smoothness
– Penalizes Surface Area
u(x) = 0
u(x) = 1
[Zach, 2007]
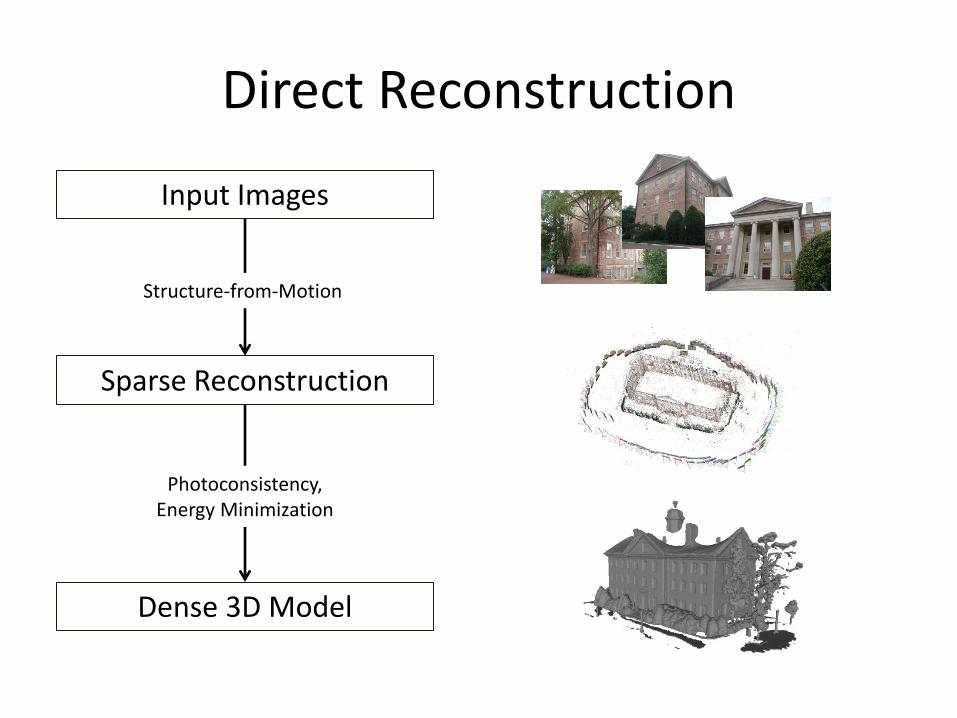
Direct Reconstruction
Input Images
Sparse Reconstruction
Structure-from-Motion
Dense 3D Model
Photoconsistency, Energy Minimization
red close, blue far
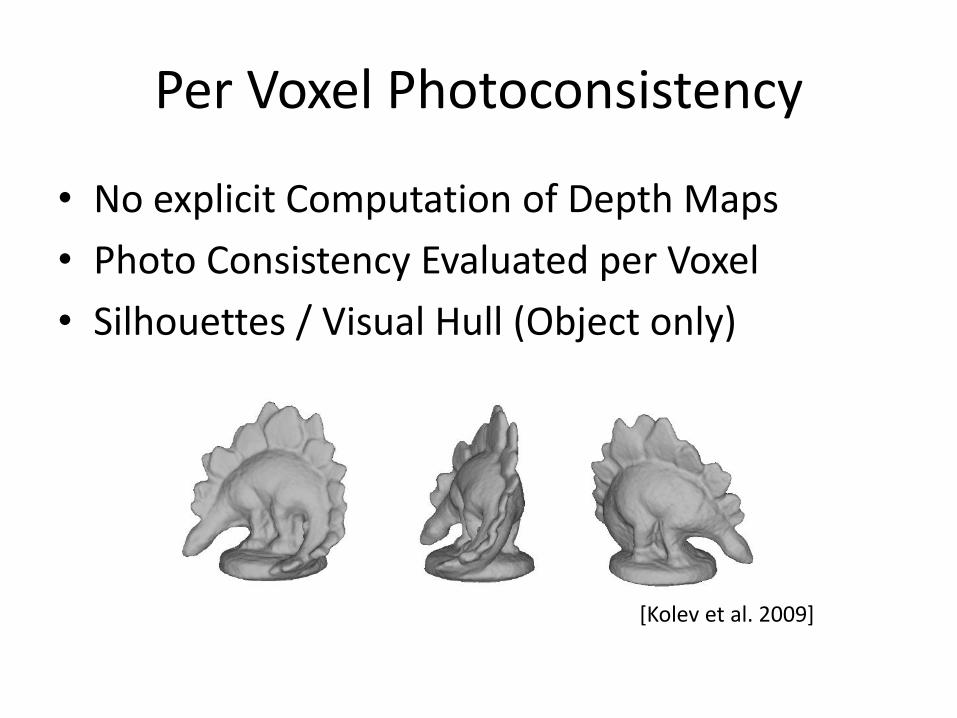
Per Voxel Photoconsistency
• No explicit Computation of Depth Maps
• Photo Consistency Evaluated per Voxel
• Silhouettes / Visual Hull (Object only)
[Kolev et al. 2009]
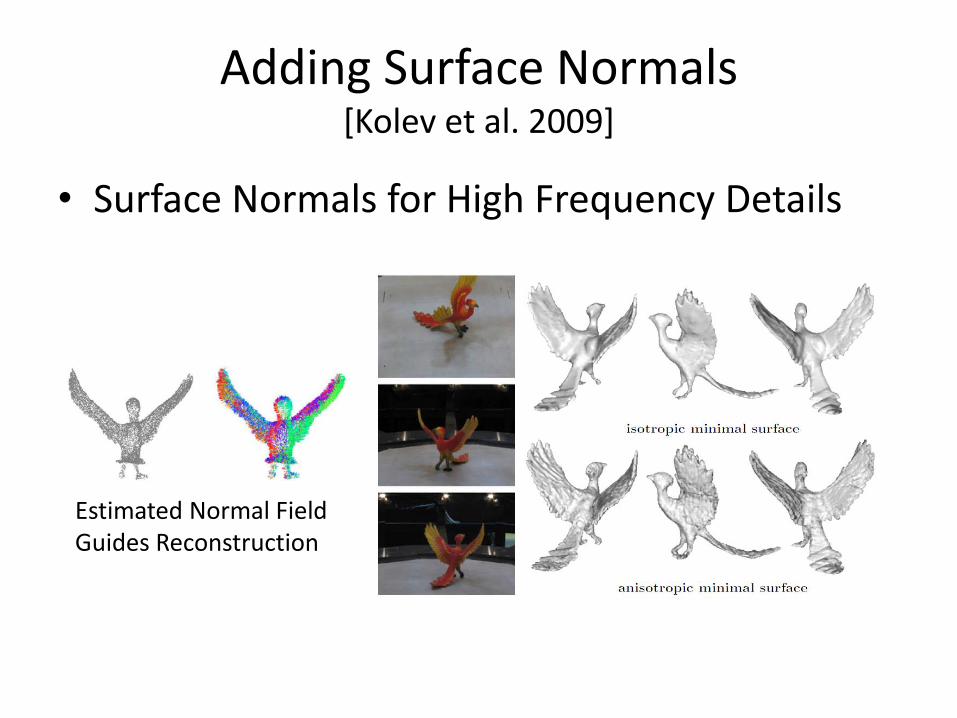
Adding Surface Normals [Kolev et al. 2009]
• Surface Normals for High Frequency Details
Estimated Normal Field Guides Reconstruction

Formulation over Rays [Liu & Cooper, 2010, 2014]
• First Transition to Occupied Space Along Ray
• Color Consistent over all Rays
• Discrete Graph Based Formulation – Alternating Minimization, Belief Propagation
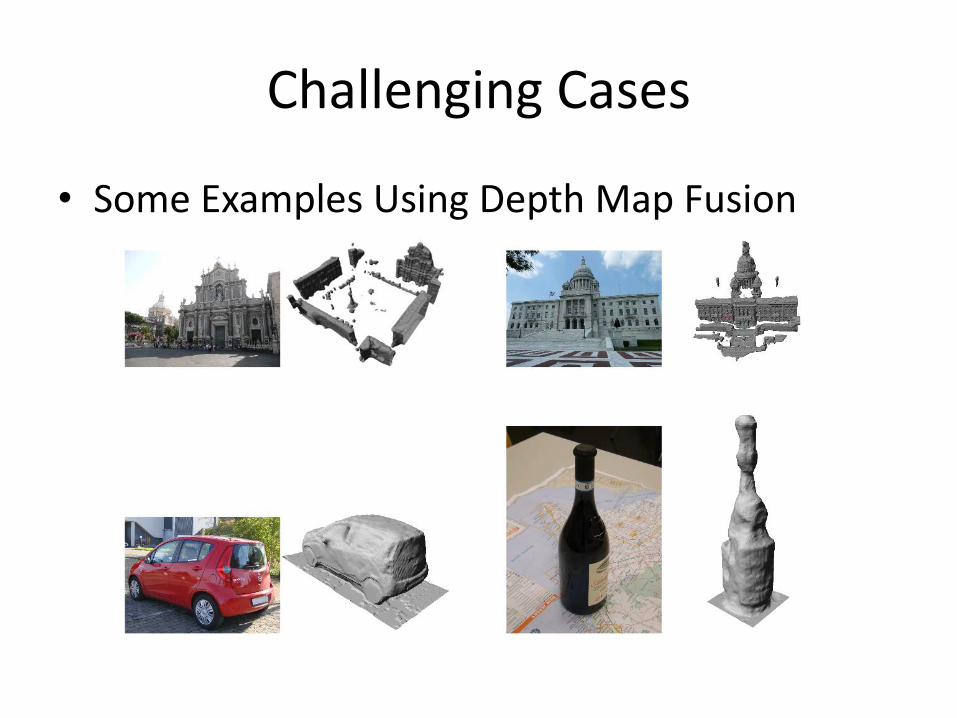
Challenging Cases
• Some Examples Using Depth Map Fusion

Adding Semantics
Input Images
Depth Maps Class Likelihoods
Semantic Classifier Sparse Reconstruction Dense Matching
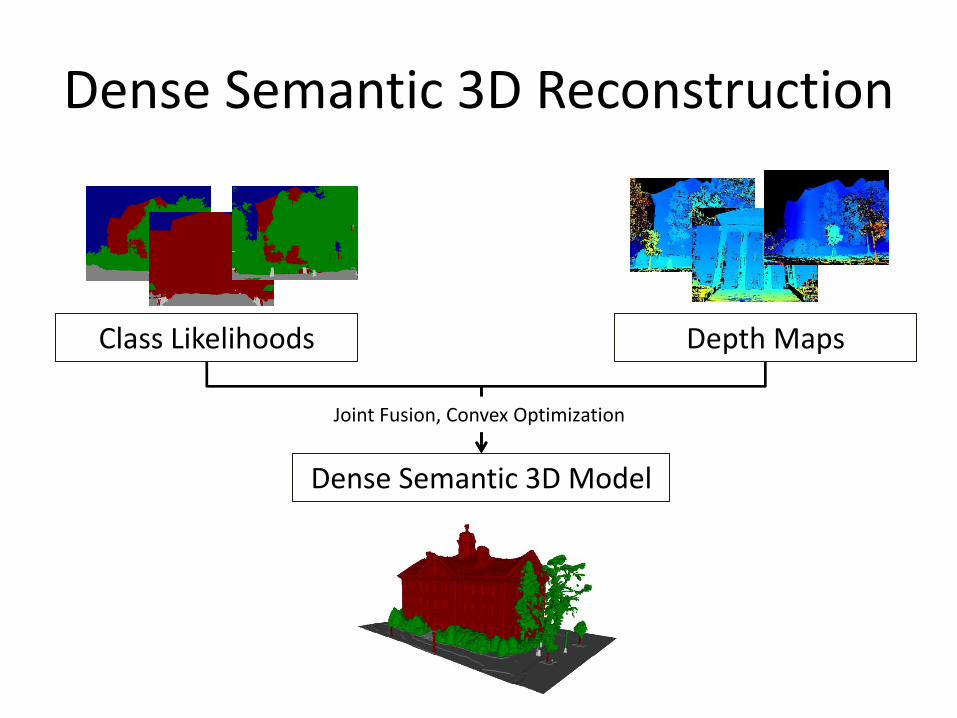
Dense Semantic 3D Reconstruction
Depth Maps Class Likelihoods
Dense Semantic 3D Model
Joint Fusion, Convex Optimization
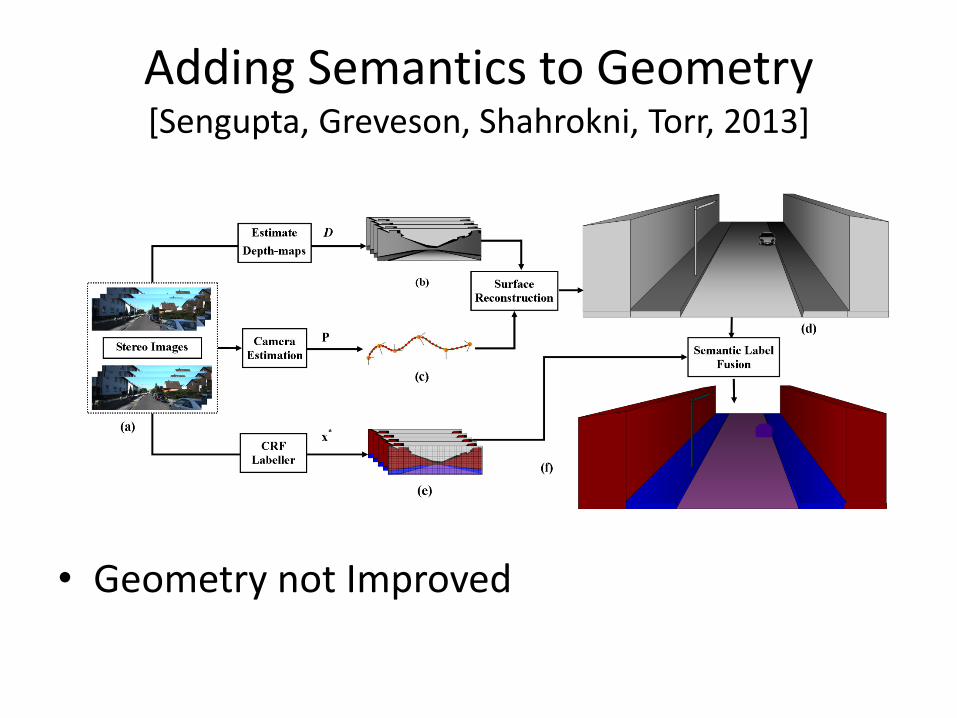
Adding Semantics to Geometry [Sengupta, Greveson, Shahrokni, Torr, 2013]
• Geometry not Improved
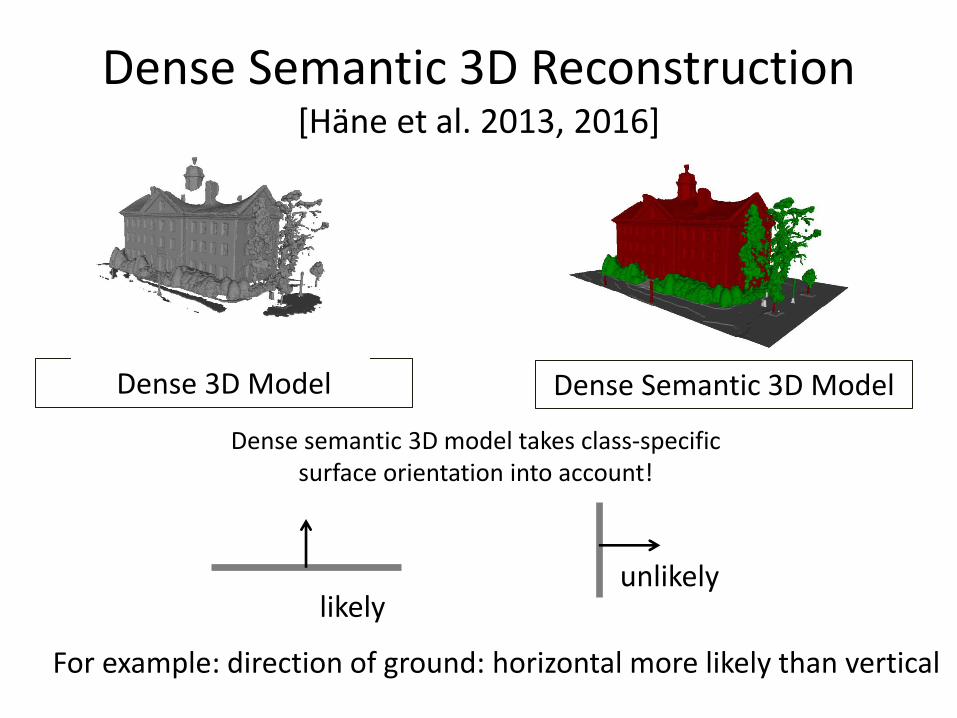
Dense Semantic 3D Reconstruction [Häne et al. 2013, 2016]
Dense Semantic 3D Model Dense 3D Model
Dense semantic 3D model takes class-specific surface orientation into account!
For example: direction of ground: horizontal more likely than vertical
likely unlikely
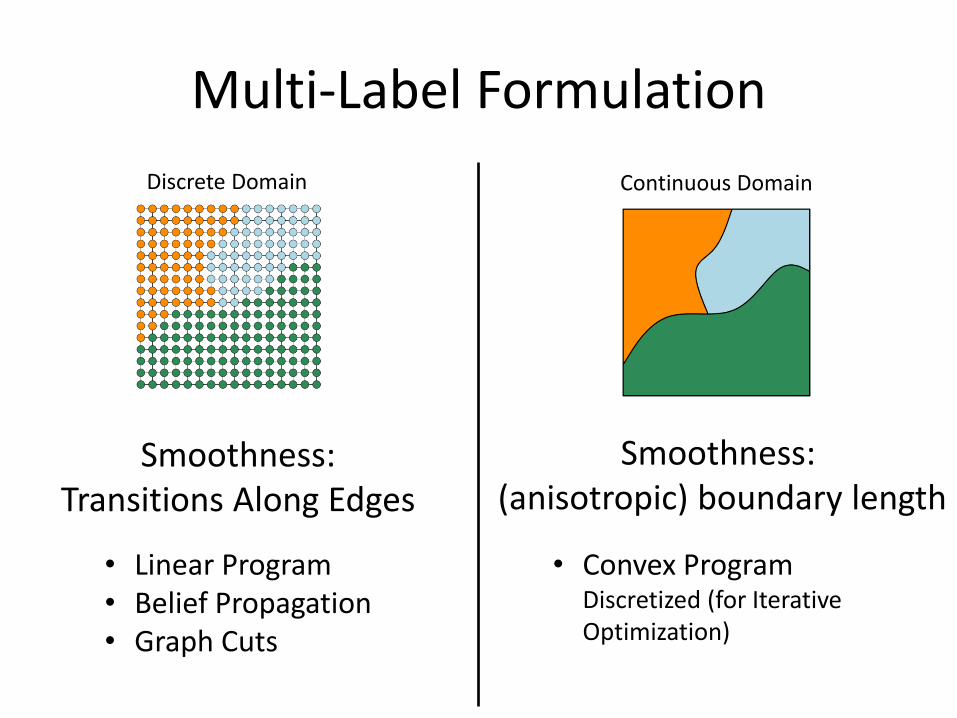
Multi-Label Formulation
Discrete Domain Continuous Domain
Smoothness: Transitions Along Edges
Smoothness: (anisotropic) boundary length
• Linear Program • Belief Propagation • Graph Cuts
• Convex Program Discretized (for Iterative Optimization)

Anisotropy / Wulff Shape
• Wulff Shape [Wulff 1901, Esedoglu and Osher 2004]
– Convex shape
– defined by

Semantic Reconstruction Formulation [Häne et al. 2013, 2016]
Data Term: Described as per-voxel unary potentials Regularization Term:
Class-specific, direction dependent, surface area penalization
Learned from training data

Data Term
• Sky -> Free Space Weight Along Whole Ray
• Sum of Weight in Each Voxel
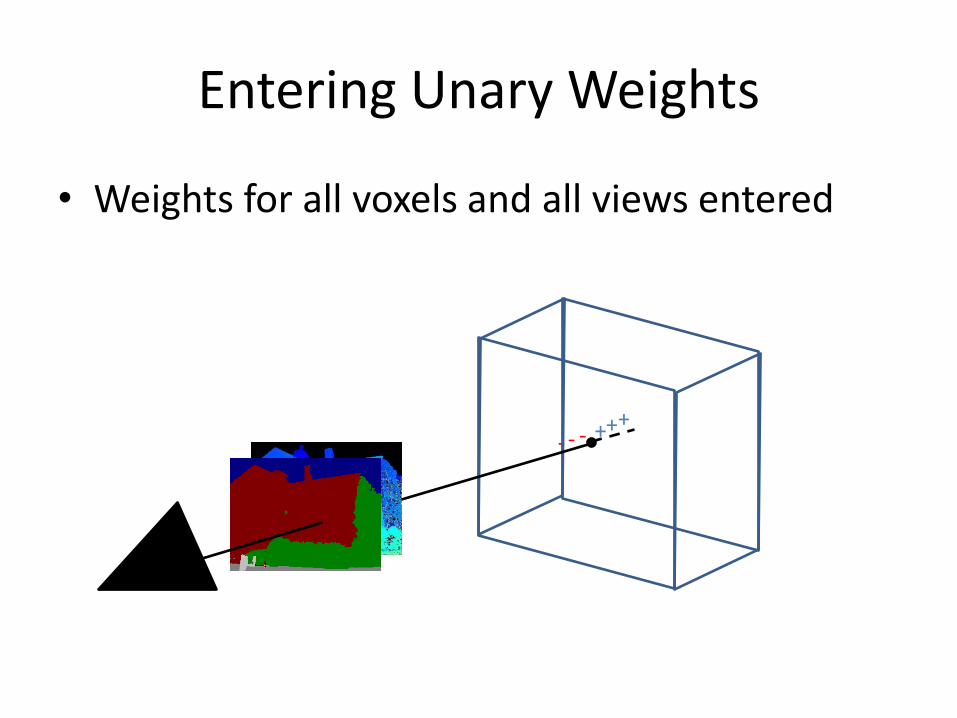
Entering Unary Weights
• Weights for all voxels and all views entered
+ + + - - -
+ + +
- - - + + +
- - -
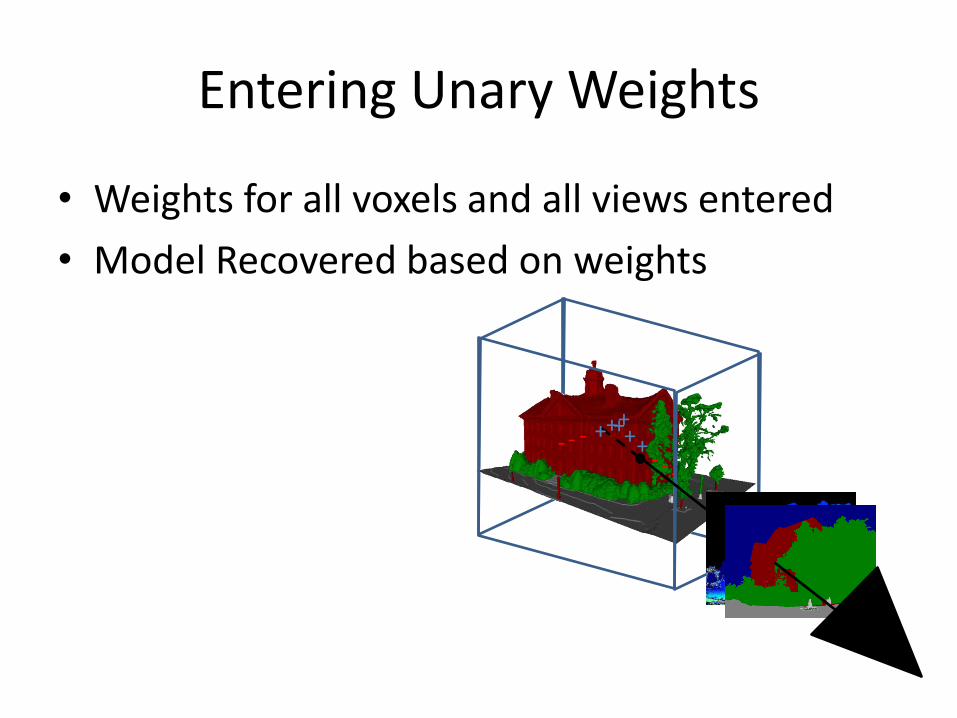
Entering Unary Weights
• Weights for all voxels and all views entered
• Model Recovered based on weights

Smoothness Term
• Isotropic + Anisotropic (Wulff Shape)
• Maximum Likelihood Estimation
• Grid Search
Two Wulff Shape Parameterizations
Training Data
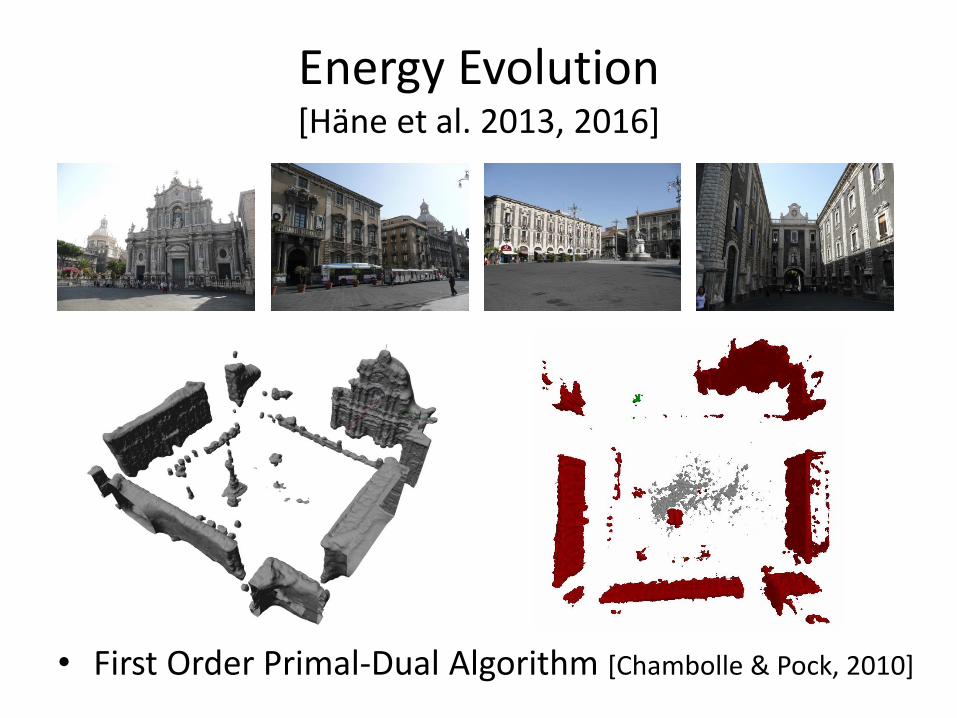
Energy Evolution [Häne et al. 2013, 2016]
Optimization using the first order primal-dual algorithm
• First Order Primal-Dual Algorithm [Chambolle & Pock, 2010]
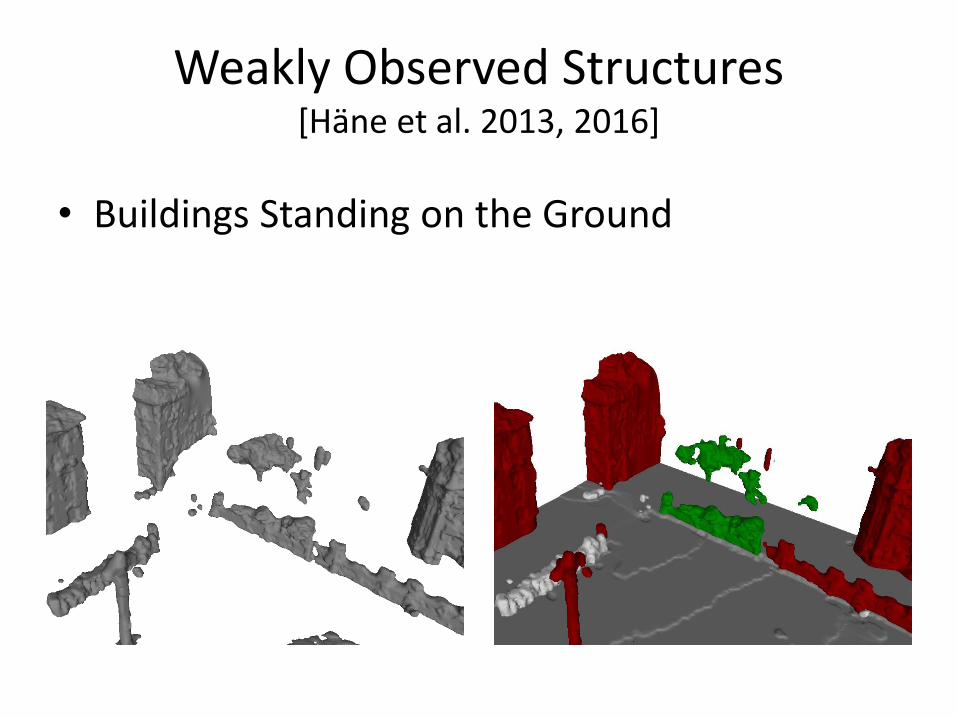
Weakly Observed Structures [Häne et al. 2013, 2016]
• Buildings Standing on the Ground

Weakly Observed Structures [Häne et al. 2013, 2016]
• Building and Vegetation Separated
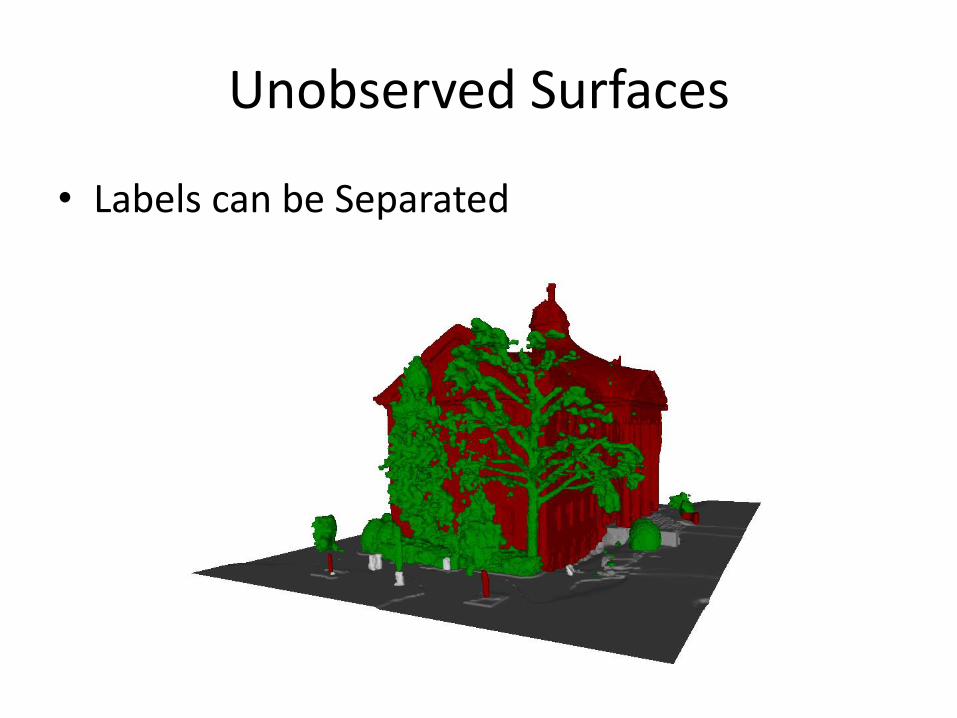
Unobserved Surfaces
• Labels can be Separated
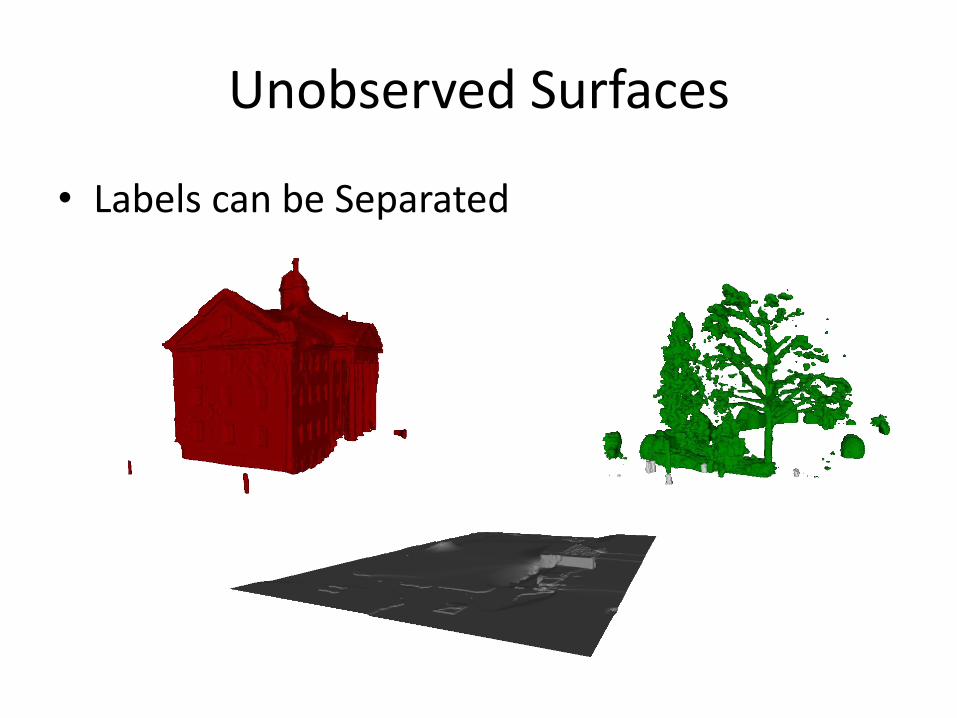
Unobserved Surfaces
• Labels can be Separated

Extension To Octrees [Blaha, Vogel, et al. 2016]
• Exploiting Sparsity of Surface
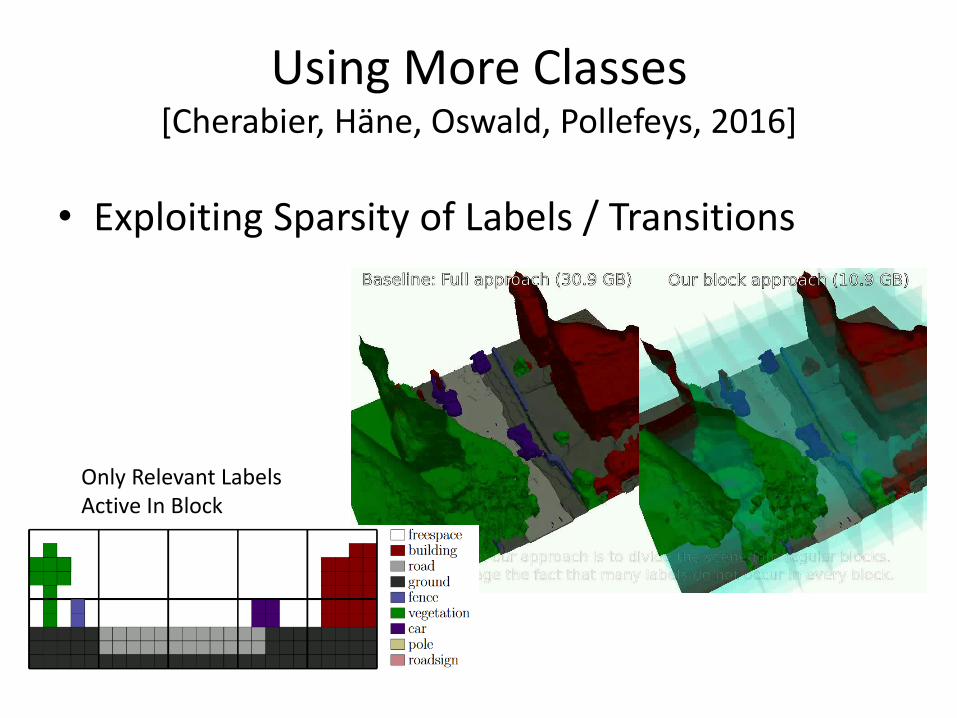
Using More Classes [Cherabier, Häne, Oswald, Pollefeys, 2016]
• Exploiting Sparsity of Labels / Transitions
Only Relevant Labels Active In Block
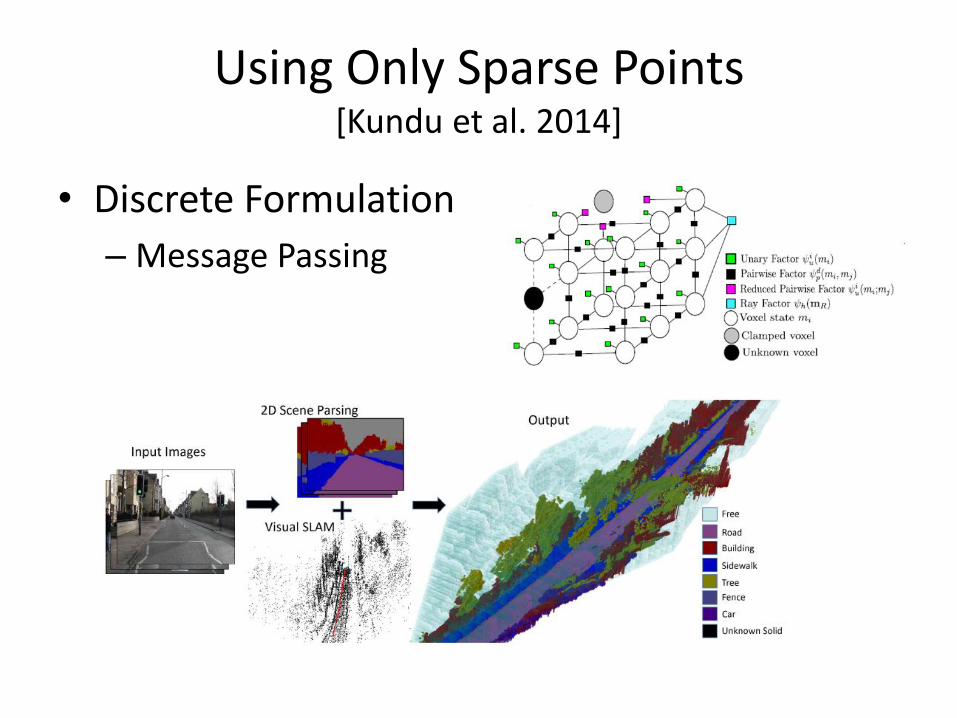
Using Only Sparse Points [Kundu et al. 2014]
• Discrete Formulation
– Message Passing
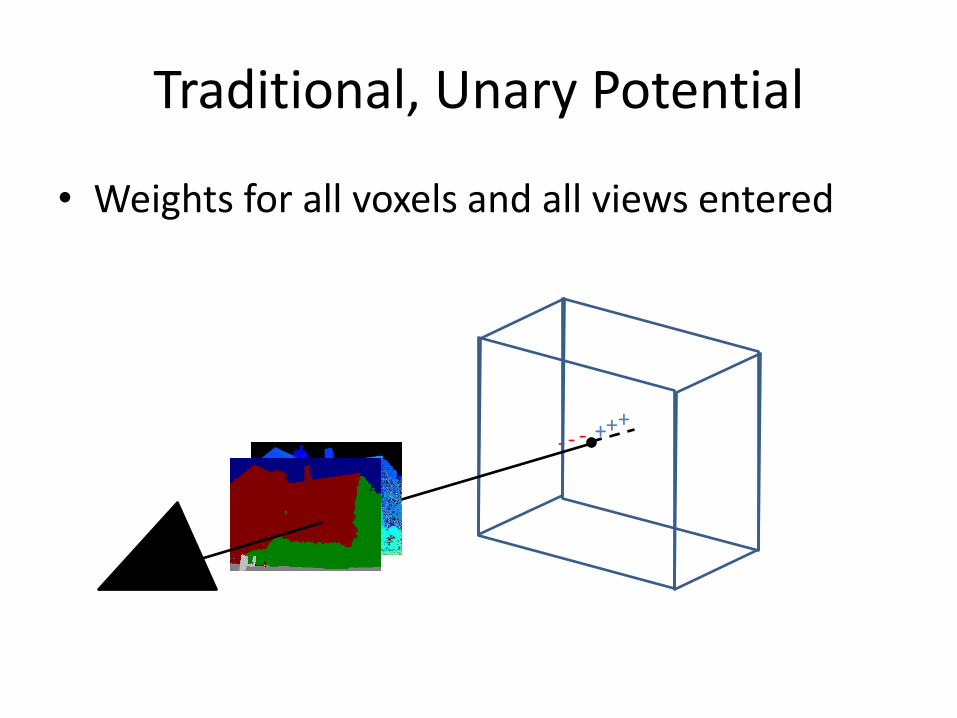
Traditional, Unary Potential
• Weights for all voxels and all views entered
+ + + - - -
+ + +
- - - + + +
- - -
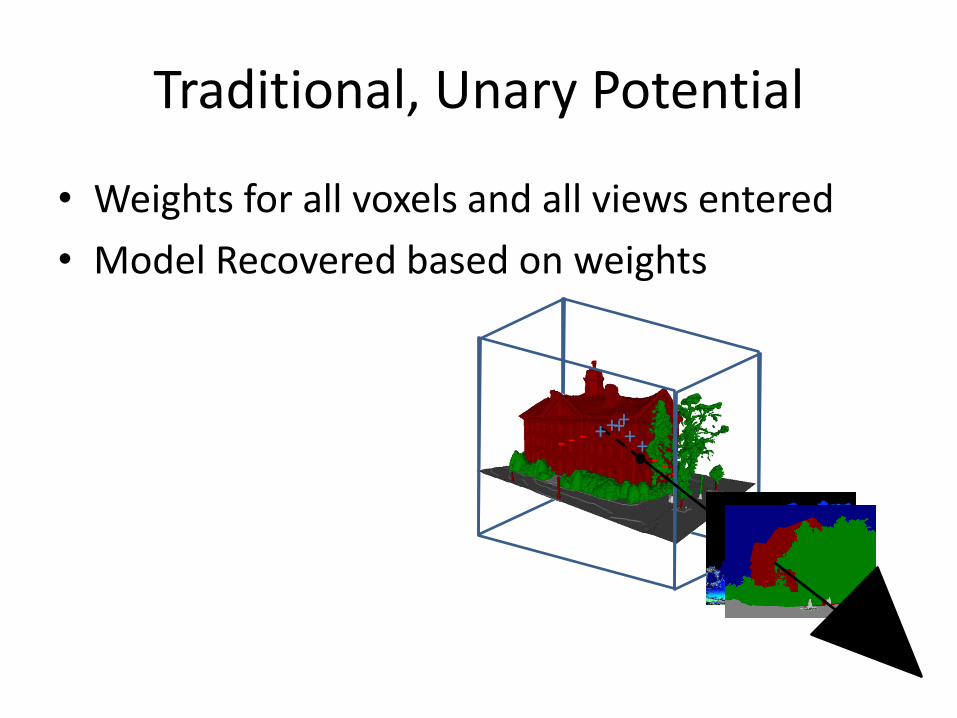
Traditional, Unary Potential
• Weights for all voxels and all views entered
• Model Recovered based on weights

Issues with Unary Potentials [Savinov, Ladicky, Häne, Pollefeys, 2015, 2016]
• Data given as Information along rays
• Approximation with unary weights -> artifacts
Closed Archway Inflated Roofline
Artifact
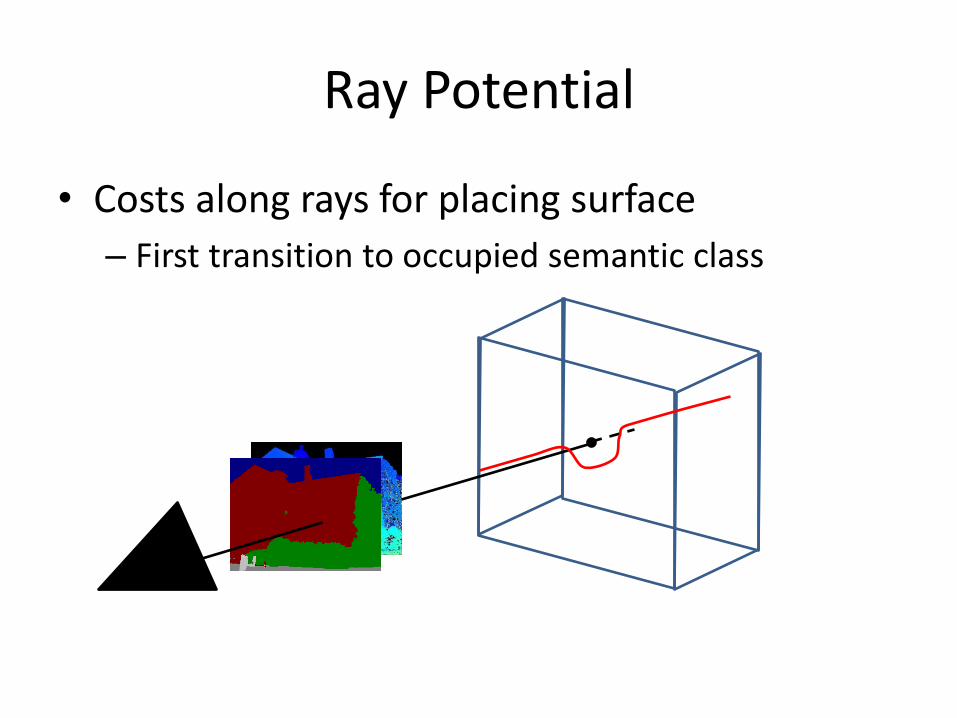
Ray Potential
• Costs along rays for placing surface
– First transition to occupied semantic class
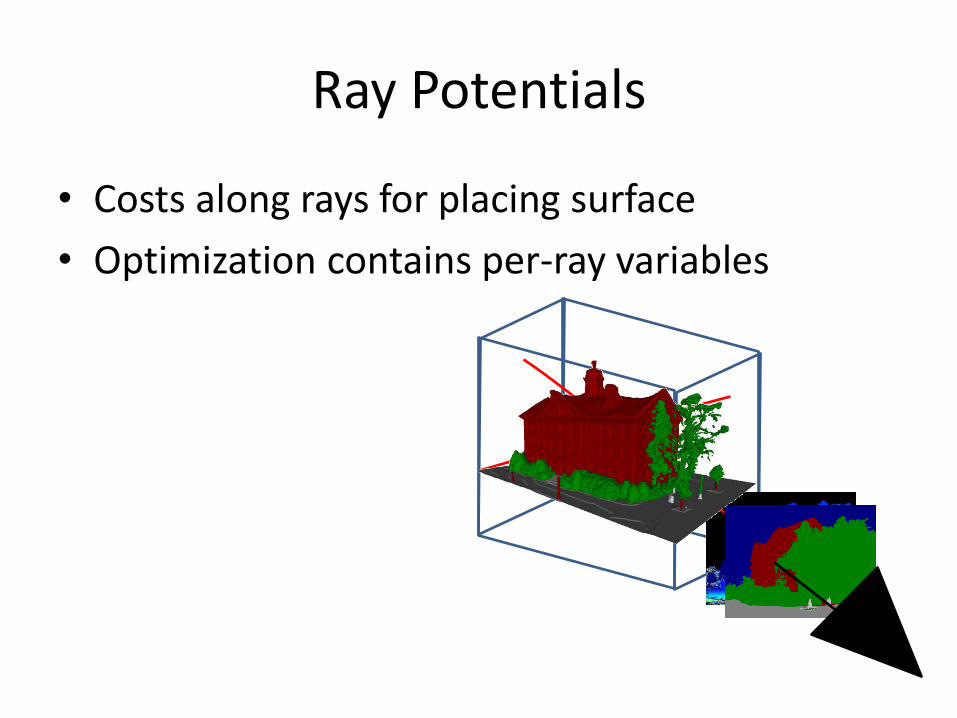
Ray Potentials
• Costs along rays for placing surface
• Optimization contains per-ray variables
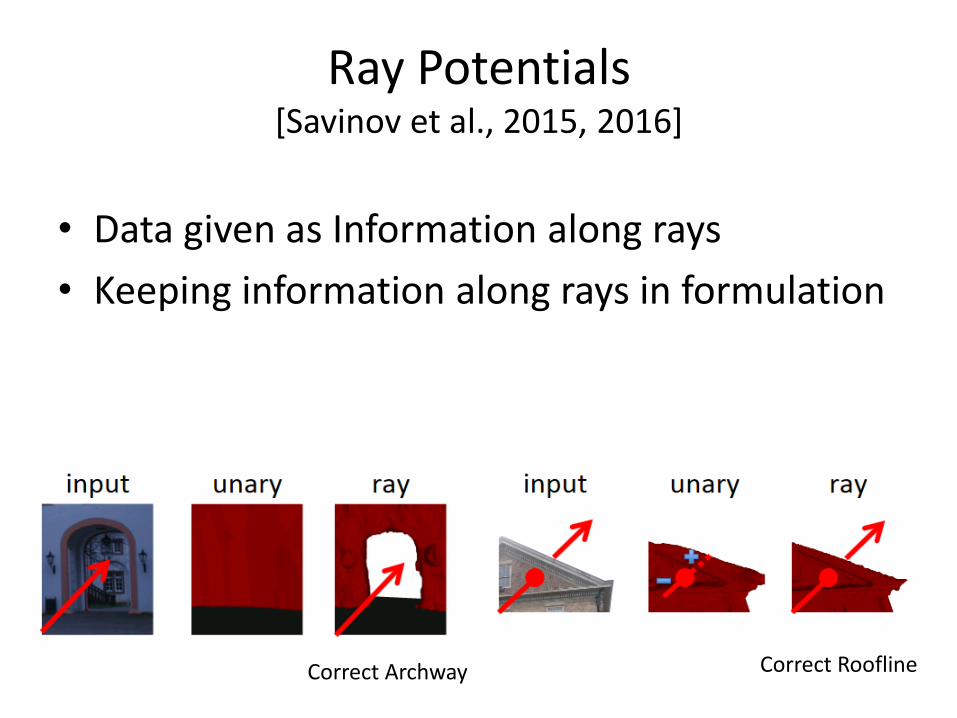
Ray Potentials [Savinov et al., 2015, 2016]
• Data given as Information along rays
• Keeping information along rays in formulation
Correct Archway Correct Roofline

Formulation [Savinov, Häne, Ladicky, Pollefeys, 2016]
Data Term: Described as ray potential Regularization Term:
Class-specific, direction dependent, surface area penalization
Local View: Describes Visible Surface in Camera
Global View: Describes Voxel Labeling
Constraints: Make Local and Global View Consistent

Formulation [Savinov, Häne, Ladicky, Pollefeys, 2016]
• Convex Relaxation Weak
• Solution: One Non-Convex Constraint
– Change of Visibility Along Ray <-> Cost Assumed
• Majorize-Minimize Optimization
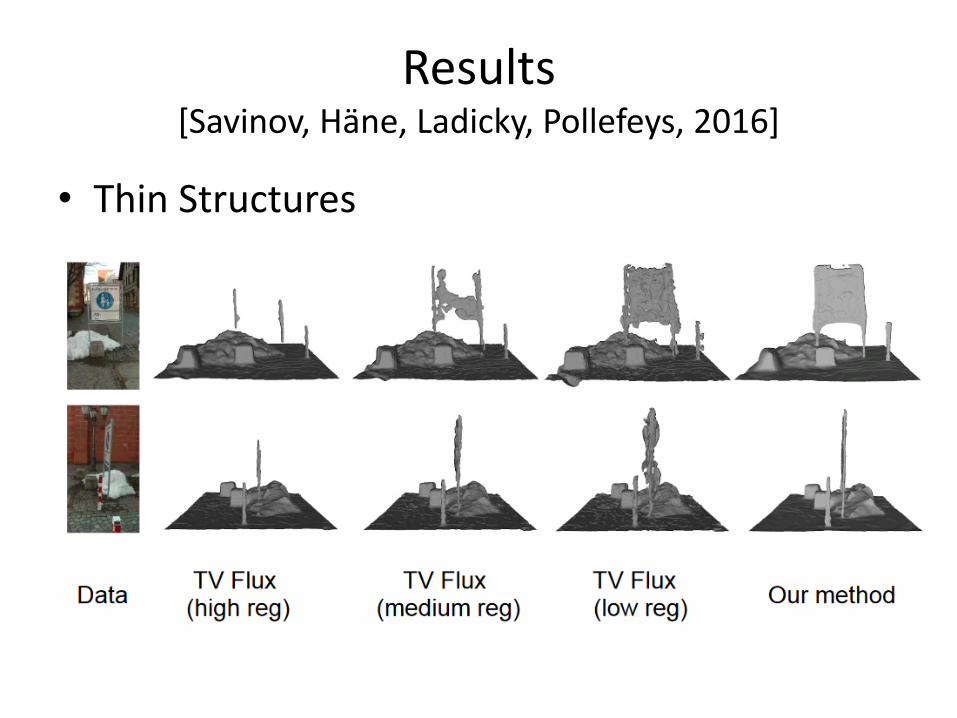
Results [Savinov, Häne, Ladicky, Pollefeys, 2016]
• Thin Structures
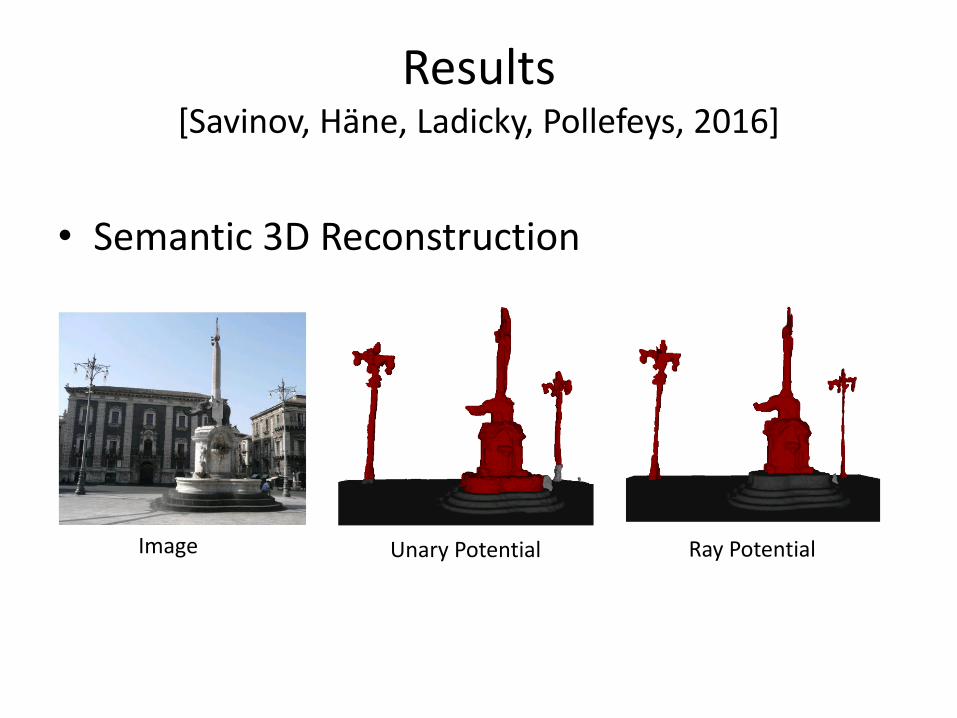
Results [Savinov, Häne, Ladicky, Pollefeys, 2016]
• Semantic 3D Reconstruction
Image Unary Potential Ray Potential
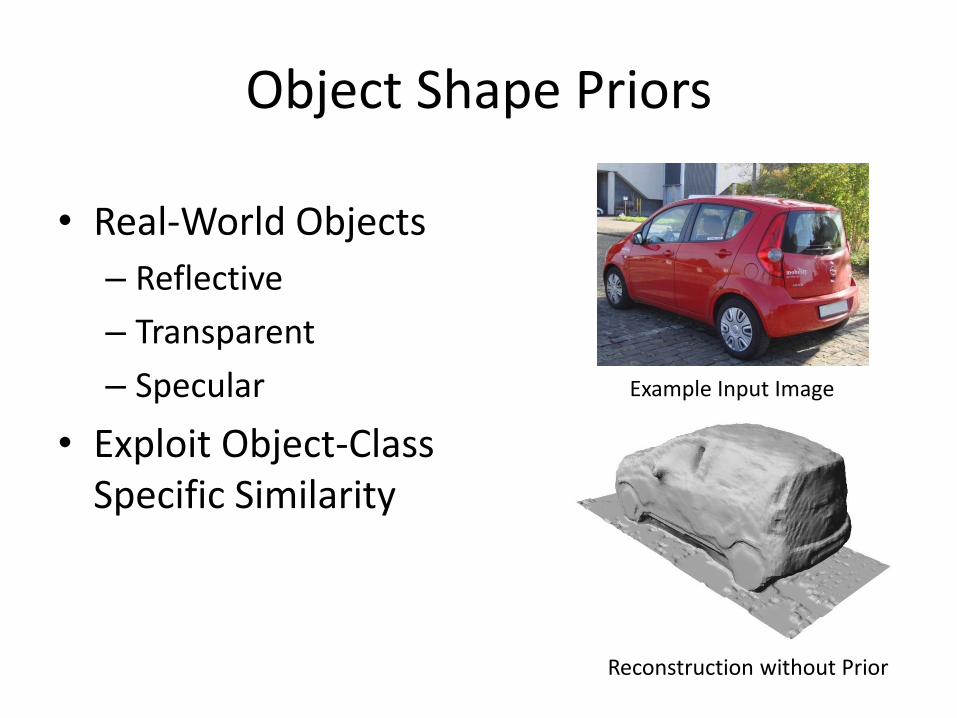
Object Shape Priors
• Real-World Objects
– Reflective
– Transparent
– Specular
• Exploit Object-Class Specific Similarity
Example Input Image
Reconstruction without Prior
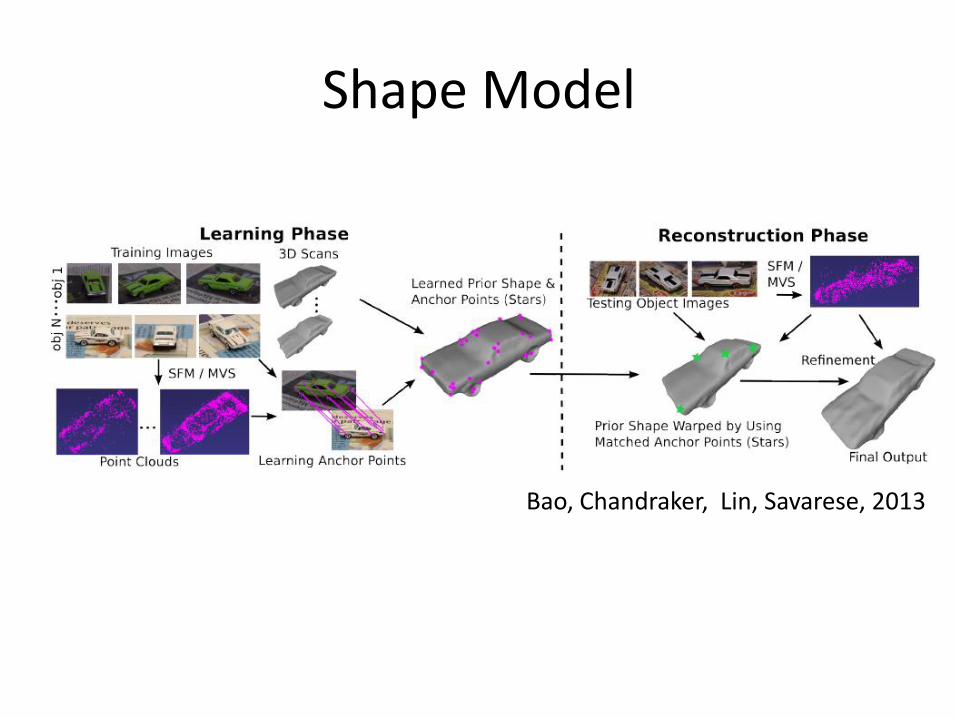
Shape Model
Bao, Chandraker, Lin, Savarese, 2013
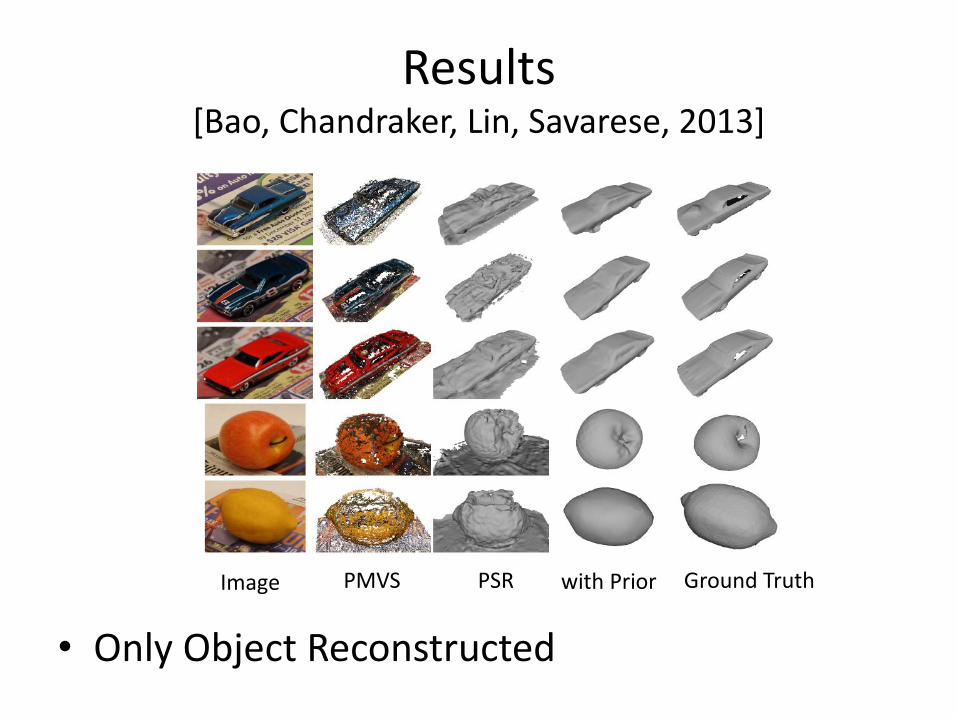
Results [Bao, Chandraker, Lin, Savarese, 2013]
Image PMVS PSR with Prior Ground Truth
• Only Object Reconstructed
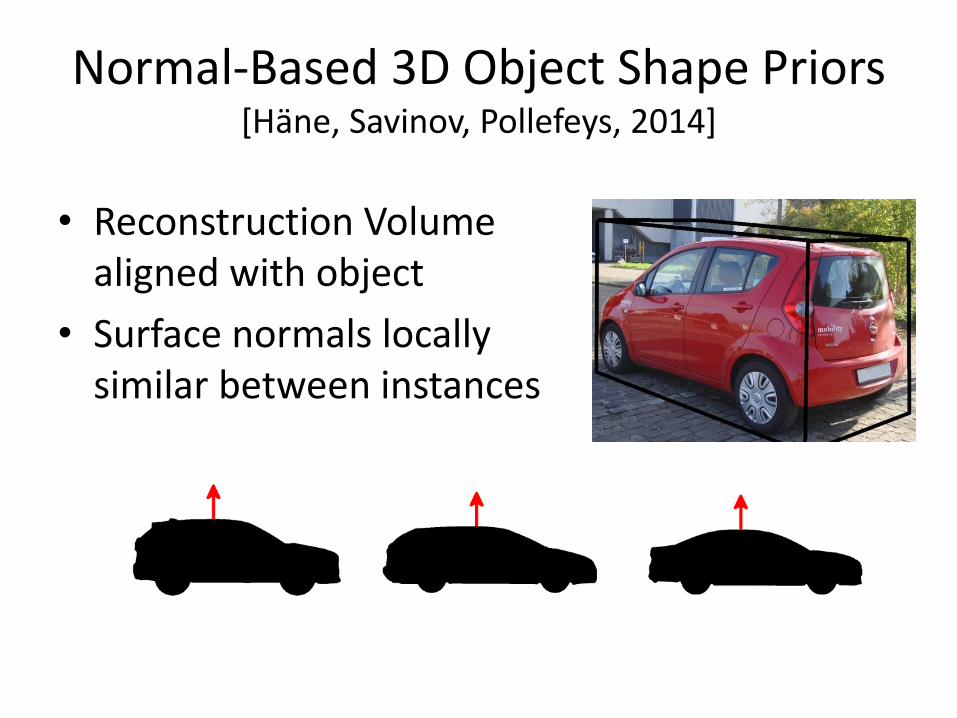
Normal-Based 3D Object Shape Priors [Häne, Savinov, Pollefeys, 2014]
• Reconstruction Volume aligned with object
• Surface normals locally similar between instances
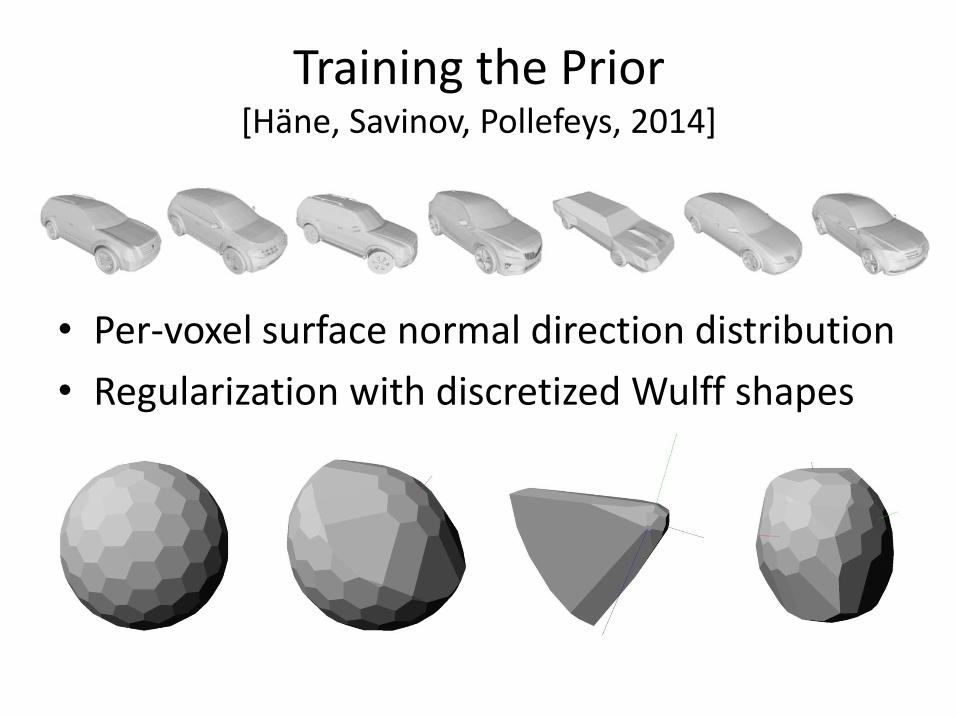
Training the Prior [Häne, Savinov, Pollefeys, 2014]
• Per-voxel surface normal direction distribution
• Regularization with discretized Wulff shapes
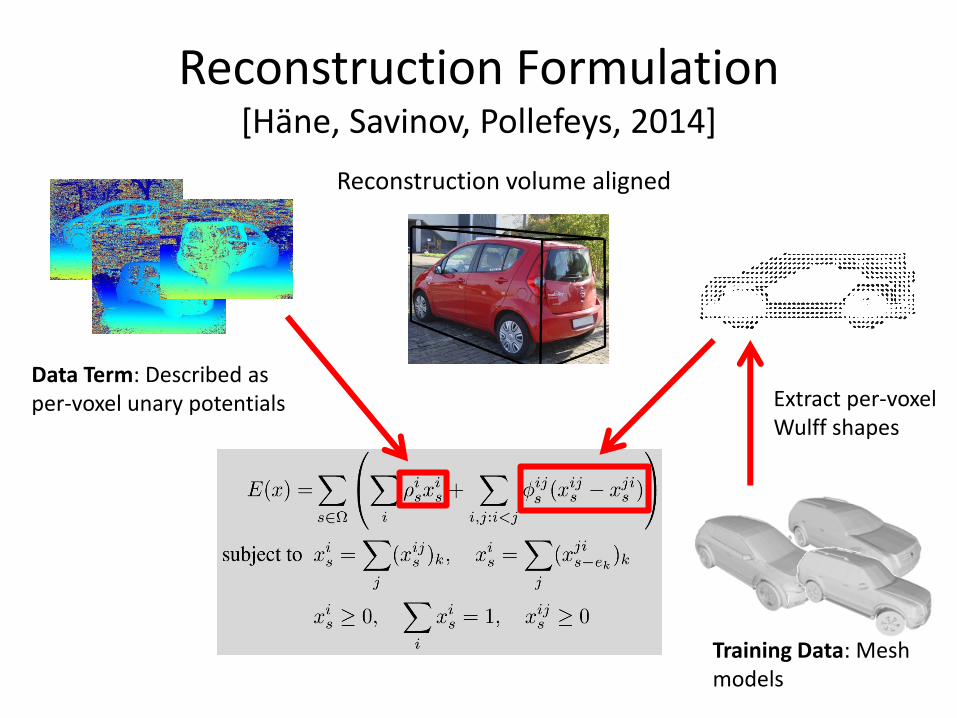
Reconstruction Formulation [Häne, Savinov, Pollefeys, 2014]
Data Term: Described as per-voxel unary potentials
Reconstruction volume aligned
Training Data: Mesh models
Extract per-voxel Wulff shapes

Results Cars [Häne, Savinov, Pollefeys, 2014]
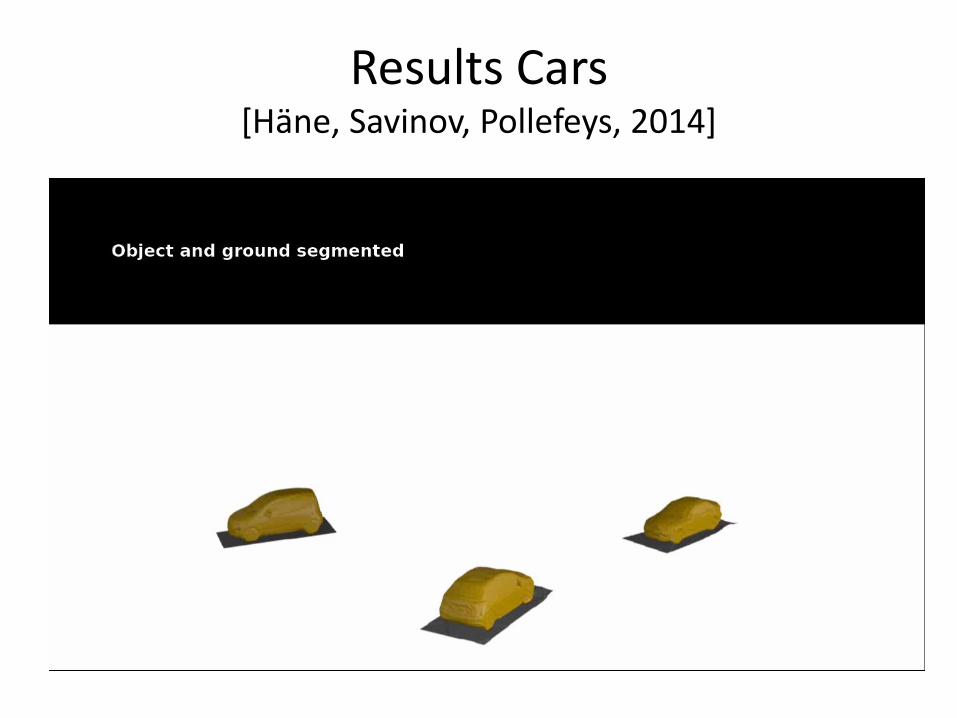
Results Cars [Häne, Savinov, Pollefeys, 2014]
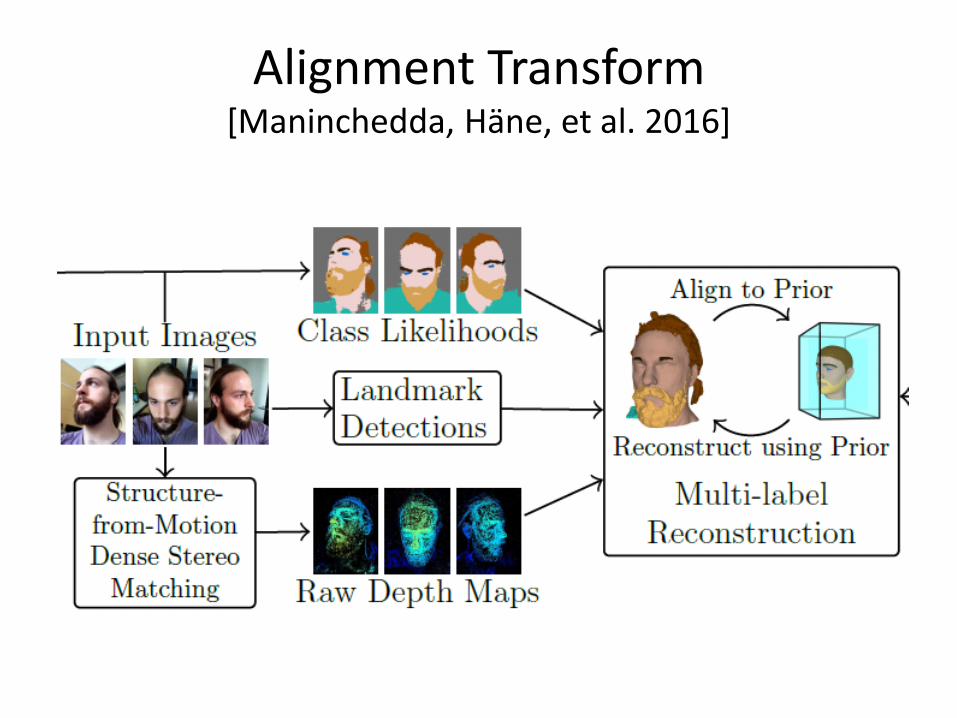
Alignment Transform [Maninchedda, Häne, et al. 2016]
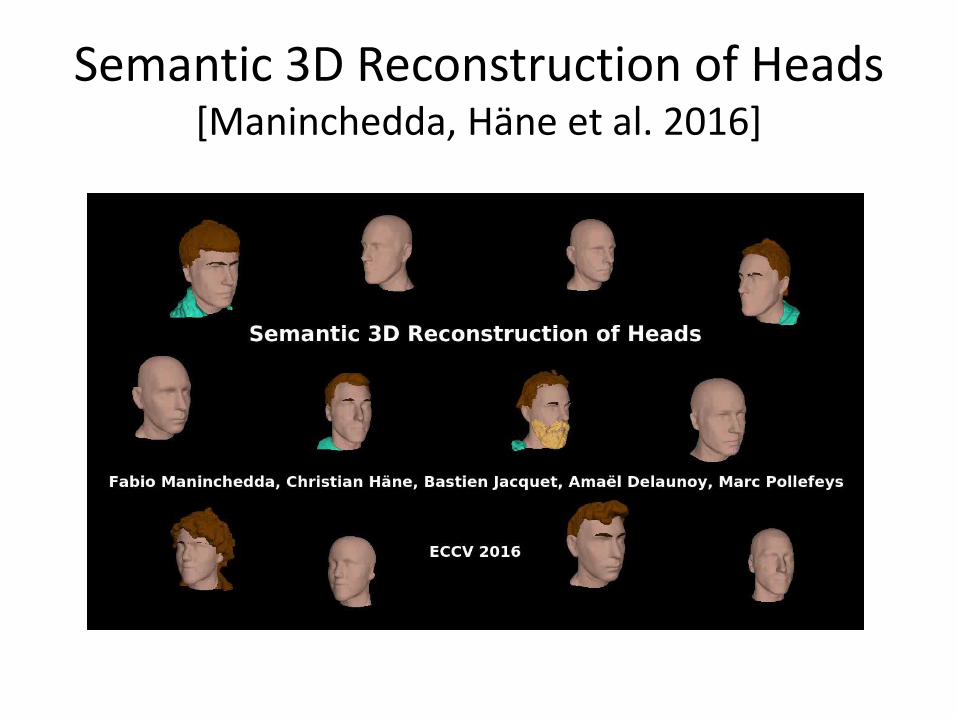
Semantic 3D Reconstruction of Heads [Maninchedda, Häne et al. 2016]

Conclusion
• Semantics Helps to Improve Geometry
• Consistent Semantic Segmentation
• Richer Representation
• Multi-Label Shape Priors
• Future Directions:
– Real-Time Applications
– End to End Learning