Embed Size (px)
Citation preview

3098 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Geolocation of AMSR-E DataHeidrun Wiebe, Georg Heygster, Member, IEEE, and Lothar Meyer-Lerbs
Abstract—The process of determining the geographic latitudeand longitude (lat/lon) of the center point of the footprint iscalled geolocation, which is currently suboptimal for the AdvancedMicrowave Scanning Radiometer for Earth Observing System(AMSR-E) Level 1 data provided by Japan Aerospace ExplorationAgency (JAXA). Here, we present a study for improving thegeolocation. The viewing angles (the nadir angle and the scanangle) that define the boresight direction of the instrument areoptimized, and new lat/lon coordinates are calculated. The opti-mization method is based on minimizing the differences betweenascending and descending swaths. The results of the calculatedviewing angles here have an overall standard deviation of 0.005◦,which is 170 m on ground for the nadir angle and 70 m for thescan angle. The residual geolocation error ranges between 425 m(89 GHz) and 1425 m (6 GHz). The averaged repositioning be-tween JAXA and our geolocation ranges between 3.5 and 7 km,i.e., in the order of one footprint size at 89 GHz. A comparison witha similar study, performed by Wentz et al., shows a good agreementin the viewing angles; the root mean square of the differences is0.0083◦ (≈ 283 m) for the nadir angle and 0.0132◦ (≈ 191 m) forthe scan angle.
Index Terms—Advanced Microwave Scanning Radiometer forEarth Observing System (AMSR-E), geolocation, remote sensing.
I. INTRODUCTION
R ETRIEVAL of surface and atmospheric parameters frompassive microwave sensors in most cases requires simul-
taneous use of data taken at different frequencies, and that allinvolved channels represent the correct location of the Earth’ssurface or atmosphere. As the data are typically taken bydifferent feedhorns and the same antenna reflector, they maypoint to different regions on the Earth; in addition, they mayhave different resolutions. As a first step to colocate the data ofdifferent frequencies in near real time, the exact position of thedata on the Earth, called geolocation, needs to be determined.
This paper presents a geolocation study of the data ofthe passive microwave sensor Advanced Microwave ScanningRadiometer for Earth Observing System (AMSR-E) developedby Japan Aerospace Exploration Agency (JAXA). It operates onthe satellite Aqua launched in May 2002. It observes at sevenfrequencies ranging from 6 to 89 GHz, each one measuringat horizontal and vertical polarization. A detailed descriptionof the AMSR-E instrument is given in [1], [2], and [4]. Thegeolocation of AMSR-E Level 1 data is currently not optimal,
Manuscript received January 7, 2008. Current version published October 1,2008. This work was supported in part by the EU project Developing ArcticModeling and Observing Capabilities for Long-term Environmental Studiesand in part by the Deutsche Forschungsgemeinschaft (German Research Foun-dation) Grant He 1746/10-3.
The authors are with the Institute of Environmental Physics, University ofBremen, 28334 Bremen, Germany (e-mail: [email protected]).
Digital Object Identifier 10.1109/TGRS.2008.919272
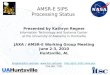
Fig. 1. Viewing geometry of the AMSR-E instrument.
which can, in particular, be seen along coastlines due to thehigh land–sea contrast in brightness temperatures (Fig. 3; for adetailed discussion, see Section III-A).
Further observations of the geolocation error show that theprojected footprints are shifted in the satellite flight direction.That means that the footprints of the ascending swaths areshifted toward northwest, and those of the descending swathsare shifted toward southwest. Consequently, the brightness tem-perature differences between ascending and descending swathsof 1 day are expected to be quite high along the coastlines. Thetop image of Fig. 4 (for a detailed discussion, see Section III-A)shows those differences at 89 GHz (the map of Scandinavia andBaltic States), where we have positive differences (yellow andred colors) along the north coasts and negative differences (blueand violet colors) along the south coasts. This observation leadsto the approach for optimizing the geolocation: the lower theabsolute values of the differences, the better the geolocation.
The goal of this paper is to retrieve parameters for theviewing angles of the satellite instrument with which a moreaccurate projection of measured brightness temperatures tolatitude and longitude (lat/lon) coordinates can be achieved.The method to improve the geolocation of AMSR-E data isto determine optimal constant offsets for all nadir and scanangles of the measurements given in the AMSR-E Level 1data. Based on these values, the lat/lon boresight coordinatesfor each footprint are recalculated. This method is similar to aprevious geolocation study [6]. However, here, we will restrictthe analysis to near-coast pixels.
II. GEOLOCATION OPTIMIZATION
The approach of improving the geolocation of AMSR-E datais finding the boresight direction by minimizing the absolutebrightness temperature differences between ascending and de-scending swaths. The boresight direction is determined by theorientation of the satellite and the offsets for the viewing angles(the nadir angle and the scan angle; Fig. 1) of the AMSR-Einstrument.
The nadir angle is the angle between the nadir and the bore-sight direction. The scan angle is the angle between the right
0196-2892/$25.00 © 2008 IEEE
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.

WIEBE et al.: GEOLOCATION OF AMSR-E DATA 3099
Fig. 2. Orientation of the satellite: roll, yaw, and pitch. Flight direction isalong the x-axis.
swath edge and the swath center of the conically scanningantenna, measured on the cone-shaped shell.
The parameters that define the orientation of the satellite arerotations in three dimensions around the satellite’s coordinatesystem origin, i.e., the center of mass (Fig. 2). Roll gives therotation around the x-axis (flight direction), pitch around they-axis, and yaw around the z-axis. The values for roll, pitch,and yaw angles (given in the AMSR-E data set) are veryaccurate as the geolocation of Moderate Resolution ImagingSpectroradiometer (MODIS, operating on the same platformas AMSR-E) is precise up to the resolution of MODIS, i.e.,250 m [8], [9]. Therefore, the angles that need to be adjusted areonly the AMSR-E-specific angles—nadir and scan angles. Theroll angle offset relative to the spacecraft frame is set to 0.09◦,as is given in [6]. By varying this offset in steps of 0.005◦ andusing the optimized nadir and scan angles, the roll angle offsetwas confirmed. A detailed description of the projection routineis given in [5].
The acquisition of optimal values for the nadir angle andthe scan angle is based on finding the minimum of absolutebrightness temperature differences between maps of ascendingand descending swaths of 1 day. Thus, the values of the viewingangles have to be varied until the minimum is reached. To focusthe difference data on the geolocation error, the analysis isrestricted to data along the coastlines. The coastline stripe isobtained by using built-in functions of the geographic mappingtool Generic Mapping Tool (GMT), which uses the WorldVector Shoreline1 for the distinction between saltwater andland: all sea pixels are set to 0, and all land pixels are set to 1,from the resulting image the gradient is taken. Consequently,all pixels that are not 0 are selected to be coastline pixels andare set to 1. Last, each pixel of the difference image (containingthe brightness temperature differences of ascending minus de-scending swaths) is multiplied with each pixel of the coastlineimage. The width of the coastline stripe is around 20 km.
The geolocation method is applied to data of 16 days (the firstday of each quarter year from January 2003 to October 2006)using global coverage. The averages of those 16 days aretaken as the global optimal viewing angles. As the feedhornsfor the different frequencies of the AMSR-E instrument arelooking in slightly different directions, the geolocation methodis applied to all AMSR-E feedhorns, each one corresponding toa frequency band.
1http://www.csc.noaa.gov/shoreline/world_vec.html
Fig. 3. Brightness temperatures of channel 89-GHz B-scan H-pol (the mapof Denmark), October 1, 2004. (Top) JAXA geolocation. (Bottom) IUPgeolocation.
III. GEOLOCATION RESULTS
The results obtained by applying the geolocation optimiza-tion method, henceforth called IUP (Institute of EnvironmentalPhysics, University of Bremen) geolocation, are visually andnumerically analyzed. First, the JAXA geolocation is comparedto the IUP geolocation in Sections III-A and B. The numericalanalysis (Section III-C) deals with the viewing angles, theirstandard deviation, and their time series analysis. Last, theresults are compared to those obtained by Wentz et al. [6] inSection III-D.
A. Visual Analysis of Geolocation
The visual analysis of brightness temperature images beforeand after adjusting the viewing angles shows a considerableimprovement in the geolocation of the data. Fig. 3 shows the
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.

3100 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Fig. 4. Brightness temperature differences (ascending–descending) of chan-nel 89-GHz B-scan H-pol (the map of Scandinavia and Baltic States),October 1, 2004. (Top) JAXA geolocation. (Bottom) IUP geolocation.
brightness temperatures at 89 GHz over Denmark before (topimage) and after (bottom image) the adjustment. The maps areproduced with the geographical mapping tool GMT by interpo-lating footprints and overlaying coastlines. In the JAXA image,some areas that correspond to land (reddish color) are locatedon water (seas and lakes), and some areas that refer to water(bluish color) are placed on land. In the IUP image, in contrast,the geolocation is much more accurate. That means that allreddish areas are on land, and all bluish areas are on water.
Looking at the brightness temperature differences betweenascending and descending swaths, the improvements in geolo-cation can be demonstrated even more impressively. Fig. 4shows the differences of JAXA geolocation (top image) andthose of IUP geolocation (bottom image). In the JAXA image,there are large differences along the coastlines; in the IUP
TABLE IMEAN DIFFERENCES PER PIXEL AT ALL AMSR-E FREQUENCIES
FOR OCTOBER 1, 2004; RATIO = JAXA DIVIDED BY IUP
Fig. 5. Residual geolocation error calculated over the 16 selected days.No trend in time was observed.
image, they are almost gone. In Table I, the numerical values ofthe mean differences per pixel for one of the 16 days are given,which is representative for all other days. The mean differencesper pixel are between 8.75 and 15.74 K for JAXA geolocationand between 4.94 and 7.87 K for IUP geolocation. That meansthat the mean differences have been reduced by factors between1.6 and 2.7. However, differences may be caused by the geolo-cation error, by different surface temperatures at the acquisitiontime of ascending and descending overpasses (which typicallyare several hours apart), and by different atmospheric influ-ences, i.e., weather effects. The latter mainly occur in the higherfrequency channels that are sensitive toward clouds.
The residual error of the calculated geolocation here is shownin Fig. 5. It ranges from 245 m for the 89-GHz channels to1425 m for the 6-GHz channel. This corresponds to 5% of thefootprint size for 89 GHz and between 2% and 3% for lower fre-quencies. The method to obtain the residual geolocation errorconsists of calculating the cross correlation between two imageswith an 8-bit quantization. The reference image contains theland–ocean contrast, where all ocean pixels are set to 0, and allland pixels are set to 255 generated from GMT’s coastline data.The second image contains brightness temperatures (using ourgeolocation) scaled from 0 (lowest TB value) to 255 (highestTB value). From the cross correlation matrix, the shift betweenthe two images is calculated. The method is applied to the16 selected days for the Northern Europe region shown inFig. 3, which is a representative, as it contains many coastlines.Both images consist of 5664 × 4960 pixels for the 89-GHzchannels and 2832 × 2480 pixels for the lower frequency chan-nels; the area is 557 × 505 km. The average and the standarddeviation over these 16 cross correlations give an estimate ofthe residual geolocation error for each channel. There was notrend in the time observed (figures not shown here).
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.

WIEBE et al.: GEOLOCATION OF AMSR-E DATA 3101
Fig. 6. Repositioning between JAXA and IUP geolocations for all swaths ofOctober 1, 2004.
B. Repositioning: JAXA–IUP
The repositioning between JAXA and IUP geolocation,i.e., the horizontal shift between those data, is shown forOctober 1, 2004 in Fig. 6 (using the coregistration parametersfor the lower frequency channels of the JAXA geolocation[2]). As the geolocation of our method is stable in time(Section III-A), we can take it as a reference. Averaged overall channels, the mean distance is 6.5 ± 1.9 km.
Investigating in more detail the mean distances for each ofthe channels reveals two things. First, the mean distances at the89-GHz channels are higher for descending than for ascendingswaths. The opposite is true for the case of the lower frequencychannels (6–36 GHz). This is assumed to be due to the JAXAcoregistration function [2]. In the JAXA data, only the lat/loncoordinates for the 89-GHz channels are given. The coordinatesfor the lower frequency channels are calculated by the JAXAcoregistration function using the 89-GHz coordinates and twoconstant coregistration parameters for each frequency channel.As we have differences of mean distances between ascendingand descending swaths in the 89-GHz channels, we also getdifferences in the lower frequency channels. As a result ofthe coregistration calculations, the mean distances at the lowerfrequency channels then get lower for descending swaths thanfor ascending ones. Thus, we would not expect this effect whenthe mean distances were equal for ascending and descendingswaths. Second, the errors for descending swaths are higher(±2.2 km) than for ascending ones (±1.3 km). The left imagesof Fig. 7 show the repositioning for one ascending (the upperleft image) and one descending (the lower left image) swathsof October 1, 2004. These are representative for all examinedswaths at all AMSR-E channels. In general, the JAXA–IUPdistances are less pronounced at the left side (relative to theflight direction) of the swaths, particularly at higher latitudes.Descending swaths have, in contrast to ascending swaths, dis-tances up to 12 km between 30◦ and −30◦ latitude.
This asymmetry is in agreement with the analysis of thegeolocation error by JAXA itself [3]. The results that JAXApresented in 2005 state that the error depends on the scanposition and is more pronounced in the descending swaths.Based on this finding, JAXA developed a correction function,which is applied to the data in the geolocation of version 2(released March 1, 2005). As the left images of Fig. 7 originate
Fig. 7. (Top images) Ascending and (bottom images) descending swaths ofrepositioning between JAXA and IUP geolocations, channel 89-GHz B-scanH-pol. (Left) October 1, 2004 (geolocation version 1). (Right) October 1, 2006(geolocation version 2). Black arrows indicate flight direction.
from 2004, the JAXA correction is not applied. The meandistances over all swaths of that day are 6.6 ± 1.3 km forascending and 6.9 ± 2.2 km for descending swaths. That meansthat the standard error is higher for descending swaths. Theright images of Fig. 7 originate from 2006; therefore, thegeolocation is adjusted by the JAXA correction function. Wesee that the distances are similar in the ascending (the upperright image) and descending (the lower right image) swaths.However, the errors in the distances of the descending swathdid not improve; instead, the errors in the distances of theascending swath got even worse. The mean distances overall swaths of that day are 6.6 ± 2.1 km for ascending and6.7 ± 1.9 km for descending swaths. That means that thestandard error is similar for ascending and descending swathswith the correction function, whereas it increases from 1.3 km(without JAXA correction) to 2.1 km (with JAXA correction).However, there are still quite high mean distances of 6.65 kmeven with applying the correction function.
Examinations of repositioning changes with time reveal thatthe mean JAXA geolocation error of the 89-GHz channelfollows a seasonal cycle (lowest in January/April, highest inOctober) overlaid by a rising trend (Fig. 8). This holds for boththe geolocation of version 1 and the one of version 2, whereasthe error drops between the versions by about 2 km. As the co-ordinates of the lower frequency channels are calculated basedon those of the 89-GHz channel, a similar trend is expectedhere. In general, the error depends on the scan position, but it isnot associated with specific geographical regions. However, it ismore pronounced between 30◦ and −30◦ latitude. The variationacross the scan is high; it ranges between 2 and 12 km (Fig. 7).
C. Numerical Analysis of Viewing Angles
The results obtained from the geolocation optimization forthe viewing angles, i.e., the nadir and scan angles, are shown inTable II. In a first geolocation optimization run, the viewingangles are varied in steps of 0.01◦ [7]. In a second run, the
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.

3102 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 46, NO. 10, OCTOBER 2008
Fig. 8. Changes of repositioning with time between JAXA and IUP geoloca-tions of channel 89-GHz B-scan H-pol.
TABLE IIOPTIMAL VIEWING ANGLES AT ALL AMSR-E FREQUENCIES
(STEP SIZE = 0.002◦). IN BRACKETS: STANDARD DEVIATION
IN DEGREES CONVERTED TO METERS ON GROUND
step size is reduced to 0.002◦, which also reduces the standarddeviation of the viewing angles. The nadir angle has an averagestandard deviation of 0.0065◦ (≈ 224 m) for step size 0.01◦,which reduces to 0.0051◦ (≈ 177 m) for step size 0.002◦.The scan angle has an average standard deviation of 0.0081◦
(≈ 118 m) for step size 0.01◦, which reduces to 0.0050◦
(≈ 73 m) for step size 0.002◦. Therefore, for further analysis,the results obtained with step size 0.002◦ will be used.
Variations of the viewing angles of 0.01◦ correspond tovariations on the Earth’s surface of 342 m for the nadir angleand 145 m for the scan angle. This conversion from degreesof the viewing angles to meters on ground also applies to thestandard deviation, which is calculated for the data set of the16 days.
The values for the optimal nadir angle range from 47.082◦ to47.664◦ with standard deviations between 0.0046◦ (≈ 156 m)and 0.0063◦ (≈ 217 m). The values for the optimal scan an-gle range from 74.848◦ to 75.410◦ with standard deviationsbetween 0.0026◦ (≈ 37 m) and 0.0070◦ (≈ 101 m).
We define as optimal viewing angles the averaged view-ing angles of the 16 selected days from January 2003 toOctober 2006. Fig. 9 illustrates the time series, their mean, andtheir standard deviation for the 89-GHz B-scan data. Similartime series for all other frequencies are given in [7]. The visualanalysis does not reveal a time trend in the data. However, thereare some quasi-periodic structures in the time series, with min-imum values frequently falling into the month of January. Thismight indicate a remaining error in the geolocation procedure.As the standard deviations correspond to a few hundred meterson ground only (Table II), further analysis of the problem isconsidered not necessary here.
Fig. 9. Optimized viewing angles of channel 89-GHz B-scan H-pol fromJanuary 2003 to October 2006. (Top) Nadir angle. (Bottom) Scan angle.
TABLE IIICOMPARISON OF OPTIMAL VIEWING ANGLES AT ALL
AMSR-E FREQUENCIES. IUP VERSUS RSS
D. Comparison: IUP Versus RSS Geolocation
In September 2005, Wentz et al. [6] from Remote SensingSystems (RSS) presented a geolocation analysis in which asimilar approach to optimize the geolocation is used. Table IIIshows the comparison of optimal viewing angles for allAMSR-E frequencies between the results of the IUP and theRSS. For easier interpretation, the numerical values are shownas diagrams in Fig. 10. The values for the optimal viewingangles are in good agreement. The highest differences betweenthe RSS and the IUP are 0.016◦ for the nadir angle (at 36 GHz)and −0.020◦ for the scan angle (at 23 GHz). The root-mean-square values of the differences are 0.008◦ (≈ 283 m) for thenadir angle and 0.013◦ (≈ 191 m) for the scan angle. In general,the IUP geolocation confirms the RSS geolocation with smallimprovements.
IV. SUMMARY AND CONCLUSION
The work presented in this paper allows to locate the obser-vations of AMSR-E much better compared to the geolocation ofthe original Level 1 data. The averaged repositioning betweenJAXA and our geolocation ranges between 3.5 and 7 km.
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.

WIEBE et al.: GEOLOCATION OF AMSR-E DATA 3103
Fig. 10. Comparison (IUP versus RSS) of optimal viewing angles at allAMSR-E channels.
Looking at the projected brightness temperatures of theAMSR-E data reveals a very good geolocation. Footprints thatcorrespond to water are indeed on water, and the ones referringto land are indeed on land (Fig. 3). The visual analysis of thedifference plots (ascending minus descending) before and afteradjusting the geolocation shows that there are almost no coast-line differences due to geolocation after the correction (Fig. 4).The mean difference of ascending minus descending swathshas been reduced by about 50% from values between 9 and16 K per pixel (higher differences at higher frequency channels;Table I) to values between 5 and 8 K per pixel. The remainingdifferences can be attributed to different surface temperaturesand different atmospheric conditions at the acquisition time (thelatter particularly affects the 89-GHz channels; see the bottomof Fig. 4 for examples). The residual geolocation error rangesfrom 245 m for the 89-GHz channels (5% of the footprint size)to 1425 m for the 6-GHz channel (2% of the footprint size).
The resulting optimal viewing angles are given in Table II.The time series of these optimal parameters shows no trend; itis randomly distributed with an overall mean standard deviationof 0.005◦ (averaged over all AMSR-E channels), which corre-sponds to a distance on the Earth’s surface of 170 m for thenadir angle and 70 m for the scan angle.
The comparison with the parameters from a similar study byWentz et al. [6] shows a good agreement. The highest differencefor the nadir angle is 0.016◦ (≈ 547 m); for the scan angle, it is0.02◦ (≈ 290 m). These differences are significant because theyare over three times the standard deviation of our geolocation.
In this paper, we focused the geolocation analysis on theviewing angles. The small remaining errors of a few hundredmeters indicate that these angles constitute the main contri-bution to the current JAXA geolocation. Further sources for
the geolocation error, e.g., the time offsets between the space-craft ephemeris time and the time associated with the sampledAMSR-E data, may only have a minor influence, as we achievevery accurate results by our optimized viewing angles.
REFERENCES
[1] K. Imaoka, Y. Fujimoto, M. Kachi, T. Takeshima, K. Shiomi, H. Mikai,T. Mutoh, M. Yoshikawa, and A. Shibata, “Post-launch calibration and dataevaluation of AMSR-E,” in Proc. IGARSS, 2003, vol. 1, pp. 666–668.
[2] JAXA, AMSR-E Level 1 Product Format Description, 2005. Tech. Rep.[Online]. Available: www.eoc.jaxa.jp/amsr-e/amsr-e_format_l1_e.pdf
[3] T. Takeshima, “Geo-location Errors,” in Proc. Joint AMSR Sci. TeamMeeting, Honolulu, HI, 2005. [Online]. Available: www.ghcc.msfc.nasa.gov/AMSR/meetings2005/takeshima_geolocation.pdf
[4] T. Kawanishi, T. Sezai, Y. Ito, K. Imaoka, T. Takeshima, Y. Ishido,A. Shibata, M. Miura, H. Inahata, and R. W. Spencer, “The Advanced Mi-crowave Scanning Radiometer for the Earth Observing System (AMSR-E),NASDA’s contribution to the EOS for global energy and water cyclestudies,” IEEE Trans. Geosci. Remote Sens., vol. 41, no. 2, pp. 184–194,Feb. 2003.
[5] L. Meyer-Lerbes, IUP AMSR-E Reprojection. Bremen, Germany: Inst.Environ. Phys., Univ. Bremen, 2006. Internal Document.
[6] F. Wentz, P. Ashcroft, and M. Brewer, “AMSR-E geolocation analysis,”in Proc. Joint AMSR Sci. Team Meeting, Honolulu, HI, 2005. [Online].Available: http://www.ghcc.msfc.nasa.gov/AMSR/meetings2005/wentz_calibration_hawaii_2005.pdf
[7] H. Wiebe, “Validation of the ARTIST sea ice (ASI) concentration algorithmand geolocation of the microwave radiometer AMSR-E data,” M.S. thesis,Univ. Bremen, Bremen, Germany, 2007.
[8] R. E. Wolfe, M. Nishihama, A. J. Fleig, J. A. Kuyper, D. P. Roy,J. C. Storey, and F. S. Patt, “Achieving sub-pixel geolocation accuracy insupport of MODIS land science,” Remote Sens. Environ., vol. 83, no. 1/2,pp. 31–49, Nov. 2002.
[9] R. E. Wolfe and V. V. Salomonson, “MODIS geolocation approach, resultsand the future,” in Proc. IEEE Workshop Advances Tech. Anal. RemotelySensed Data, Oct. 27–28, 2003, pp. 424–427.
Heidrun Wiebe received the B.S. degree in infor-mation technology in 2003 from the University ofCooperative Education, Mannheim, Germany, andthe M.S. degree in environmental physics in 2007from the University of Bremen, Bremen, Germany,where she is currently working toward the Ph.D.degree at the Institute of Environmental Physics.
Her research interests include satellite remotesensing of arctic regions.
Georg Heygster (M’00) received the Diploma de-gree in solid state physics and the Ph.D. degreein digital image processing from the University ofGöttingen, Göttingen, Germany, in 1976 and 1979,respectively.
He served as a Consultant with the Computer Cen-ter, University of Bremen, Bremen, Germany, from1979 to 1988. Since then, after one year workingon the imaging mechanisms of scanning acousticmicroscopes, he has been the Head of the Geophys-ical Analysis of Satellite Images Group, Institute
of Environmental Physics, University of Bremen. He has been a PrincipalInvestigator or a Coinvestigator of many research projects funded by EU,ESA, DFG, and JAXA. These projects include the development of sensorsoft- and hardwares, conducting campaigns, the final data analysis from multi-and single-sensor data to geophysical parameters, and the interpretation andapplication of these results in many areas such as meteorology, climatology,and oceanography. His research activities include passive and active microwaveremote sensing, particularly of both surface and atmospheric parameters in thehigh latitudes, various aspects of the hydrological cycle, long-term trends, andretrieval techniques.
Lothar Meyer-Lerbs received the M.Sc. degree in environmental physics fromthe University of Bremen, Bremen, Germany, in 2005.
Authorized licensed use limited to: IEEE Xplore. Downloaded on October 7, 2008 at 5:48 from IEEE Xplore. Restrictions apply.