Embed Size (px)
Citation preview

Measurement 47 (2014) 804–812
Contents lists available at ScienceDirect
Measurement
journal homepage: www.elsevier .com/ locate /measurement
Generalized Rayleigh quotient based innovation covariancetesting applied to sensor/actuator fault detection
0263-2241/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.measurement.2013.10.010
⇑ Tel.: +90 (212) 285 31 05; fax: +90 (212) 285 31 39.E-mail address: [email protected]
Chingiz Hajiyev ⇑Istanbul Technical University, Faculty of Aeronautics and Astronautics, 34469 Maslak, Istanbul, Turkey
a r t i c l e i n f o a b s t r a c t
Article history:Received 5 February 2013Accepted 7 October 2013Available online 16 October 2013
Keywords:Fault detectionKalman filteringInnovation covarianceWishart matrixGeneralized Rayleigh quotient
A new approach based on the generalized Rayleigh quotient for testing the innovationcovariance of the Kalman filter is proposed. The optimization process of testing quality isreduced to the classical problem of maximization of the generalized Rayleigh quotient.In the simulations, the longitudinal and lateral dynamics of the F-16 aircraft model are con-sidered, and the detection procedure of sensor/actuator faults, which affect the innovationcovariance, is examined. Comparison of the proposed generalized Rayleigh quotients basedalgorithms for testing the innovation covariance is performed in the sense of the fastestdetection of a fault and the detected minimum fault rate. Some recommendations forthe fastest detection of the fault are given.
� 2013 Elsevier Ltd. All rights reserved.
1. Introduction
The problem of sensor/actuator fault detection, in realtime, appears in many problems of control in aerospace[1]. Many fault detection methods have been developedto detect and identify sensor and actuator faults by usinganalytical redundancy [2–5]. In [2,3] algorithms for thedetection and diagnosis of multiple faults in a dynamicsystem are described. They are based on the InteractingMultiple-Model (IMM) estimation algorithm, which isone of the most cost-effective adaptive estimation tech-niques for systems involving structural and parametricchanges. The proposed algorithms provide an integratedframework for the fault detection, diagnosis, and state esti-mation. In [4] Multiple model adaptive estimation (MMAE)methods have been incorporated into the design of a flightcontrol system for the variable in-flight stability test air-craft (VISTA) F-16, providing it the capability to detectand compensate sensor/actuator failures. The algorithmconsists of a ‘‘front end’’ estimator for the control system,composed of a bank of parallel Kalman filters, eachmatched to a specific hypothesis about the failure status
of the system (fully functional or a failure in any one ofthe sensors or actuators), and a means of blending the filteroutputs through a probability-weighted average. In meth-ods, described in [2–4], the faults are assumed to beknown, and the Kalman filters are designed for the knownsensor/actuator faults. As the approach requires severalparallel Kalman filters, and the faults should be known, itcan be used in limited applications.
In [5] an analytical redundancy-based approach fordetecting and isolating sensor, actuator, and component(i.e., plant) faults in complex dynamical systems, such asaircrafts and spacecrafts is developed. The method is basedon the useage of constrained Kalman filters, which are ableto detect and isolate such faults by exploiting functionalrelationships that exist among various subsets of availableactuator input and sensor output data. A statistical changedetection technique based on a modification of the stan-dard generalized likelihood ratio (GLR) statistic is used todetect faults in real time. The GLR test requires the statis-tical characteristics of the system to be known before andafter the fault occurs. As this information is usually notavailable after the fault, the method has limited applica-tions in practice.
In Refs. [6–9] the neural network based methods to de-tect sensor/actuator failures are developed and discussed.

C. Hajiyev / Measurement 47 (2014) 804–812 805
Ref. [6] describes a study related to the testing and valida-tion of a neural-network based approach for the problemof actuator failure detection and identification after theoccurance of battle damage to an aircraft control surface.In [7] genetic algorithms are proposed as a means of opti-mising the weighting connections of the neural networkand used in order to assist the diagnosis of the fault. In[8] fault diagnosis is accomplished by means of a bankof estimators, which provide estimates of the parametersthat describe actuator, plant, and sensor faults. Ref. [9]proposes a new gear fault identification method basedon the Hilbert–Huang transform (HHT) and self-organiz-ing feature map (SOM) neural network. HHT is a methodfor adaptive analysis of non-linear and non-stationarysignals, but it can only distinguish conspicuous faults.SOM neural network is a network learning with noinstructors which has self-adaptive and self-learning fea-tures and can compensate for the disadvantage of HHT. In[10] a framework based on the use of dynamic neural net-works for data-based process monitoring, fault detectionand diagnostics of non-linear systems with partial statemeasurement is presented. The methods based on artifi-cial neural networks and genetic algorithms do not havephysical bases. Therefore, according to the different datacorresponding to the same event, the model gives differ-ent solutions. Thus, the model should be continuouslytrained by using the new data.
In this direction of studies, it is necessary to mentionthe theory of diagnostics of a dynamic system by the inno-vation of the Kalman filter [1,11–13]. The faults that ap-pear in the system of estimations lead to the changes inthe statistical characteristics of the innovation sequence.Therefore, in this case, the fault detection problem is re-duced to the problem of the fastest detection of the devia-tion of these characteristics from nominal. The advantagesof these methods are as follow: they provide the monitor-ing of the correctness of the result obtained by the currentworking input actions; they do not require a priori infor-mation about the values of the changes in the statisticalcharacteristics of the innovation sequence in case of fault;they allow one to solve the fault detection problem in realtime; they require small computational expenditures forrealization since they do not increase the dimension ofthe initial problem, in contrast to the most algorithmicmethods.
In [13] the sensor and control surface/actuator failuresthat affect the mean of the innovation have been consid-ered. The methods of testing the correspondence betweenthe innovation sequence and the white noise and revealingthe change of its expectation are based on the classical sta-tistical methods and they are considered in detail in the lit-erature [1,11,13]; therefore, it shall not be concentrated ontesting these characteristics.
Testing, in real time, the innovation covariance matrixof the Kalman filter turns out to be a very complicatedand not well developed topic, since there are difficultiesin the determination of the confidence domain for a ran-dom matrix. Moreover, existing methods of high-dimen-sional statistical analysis [14] usually lead to asymptoticdistributions; this sharply diminishes the operativenessof these methods.
Therefore, one makes use of a scalar measure of thismatrix in practice, such as the trace, sum of the matrix ele-ments, generalized variance (determinant), eigenvalues ofthe matrix, etc. The algorithm for testing the trace of theinnovation covariance matrix is presented in [11]. But thetrace testing algorithm ignores the off-diagonal elementsof the covariance matrix. Therefore, this algorithm cannotdetect very small changes in the system [1].
In [12] for multidimensional dynamic systems a faultdetection algorithm based on the confidence interval ofthe generalized variance of the Kalman filter innovation,is presented. The confidence boundaries fot the determi-nant of the sample covariance matrix constructed by Mindependent and identically distributed normalized inno-vation vectors with the identity covariance matrix wasdetermined in this study. The disadvantage of this method;M should be large and as known, larger estimation windowreduces the ability of the algorithm to trace the high-fre-quency changes in innovation covariance correctly.
Most of the fault detection tests are based on the statis-tical properties of the eigenvalues of the sample covariancematrix [15,16]. There exists some interesting results on thedistribution of eigenvalues, the characteristic function ofeigenvalues, and the distribution and moments of thesmallest eigenvalue of Wishart distributed matrices [15–18]. But the application of the mentioned works to faultdetection problem of multidimensional dynamic systemsturns out to be very complicated since there are difficultiesabout determining the confidence domain (or intervals) forthe eigenvalues of the random matrix.
In [19] an operative method of testing the innovationcovariance of the Kalman filter based on the Tracy–Widomdistribution is proposed. The maximal eigenvalue of therandom Wishart matrix is used as the monitoring statistic,and the testing problem is reduced to determine theasymptotics for the largest eigenvalue of the Wishart ma-trix. An algorithm for testing the largest eigenvalue basedon the Tracy–Widom distribution is proposed and appliedto the F-16 aircraft flight control system for detection ofsensor and control surface faults.
In the present paper, a new approach based on the gen-eralized Rayleigh quotient for testing the innovationcovariance of the Kalman filter is proposed. The optimiza-tion process of testing quality is reduced to the classicalproblem of maximization of the generalized Rayleigh quo-tient. The operative algorithms for testing the innovationcovariance are proposed and examined on the basis ofthe aircraft sensor/actuator fault detection.
The structure of this paper is as follow. In Section 2, thefault detection problem in multidimensional dynamic sys-tems based on the Kalman filter innovation is formulated.New results for the generalized Rayleigh’s quotient basedinnovation covariance testing are given in Section 3. TheAFTI/F-16 aircraft model description and Extended Kalmanfilter for the F-16 nonlinear dynamic model estimation aregiven in Section 4. In Section 5 some simulations are car-ried out for the sensor/actuator fault detection problemin the AFTI/F-16 aircraft flight control system. The changesthat affect the innovation covariance have been consid-ered. The fault detection algorithms based on the general-ized Rayleigh quotients are examined in this section.

806 C. Hajiyev / Measurement 47 (2014) 804–812
Section 6 gives a brief summary of the obtained results andthe conclusion.
2. Problem statement
Let us consider a class of systems described by the dif-ferential equations in the form of
xðkþ 1Þ ¼ Uðkþ 1; kÞxðkÞ þ Gðkþ 1; kÞwðkÞ ð1Þ
zðkÞ ¼ HðkÞxðkÞ þ VðkÞ ð2Þ
where x(k) is the n-dimensional state vector of the system,Uðkþ 1; kÞ is the transition matrix of the system with of or-der n � n, w(k) is the random n-dimensional vector of thesystem noises, G(k + 1, k) is the transition matrix of systemnoises with order of nxn, z(k) is the s-dimensional mea-surement vector, H(k) is the measurement matrix of thesystem with order of sxn, V(k) is the random s-dimensionalvector of the measurement noises.
It is assumed that the random vectors w(k), V(k), andx(0) are mutually independent white Gaussian processeswith zero expectations and their covariance matrices aredefined by the relations
E½wðkÞwTðjÞ� ¼ QðkÞdðkjÞ; E½VðkÞVTðjÞ�¼ RðkÞdðkjÞ; E½xð0ÞxTð0Þ� ¼ Pð0Þ;
where d(kj) is the Kronecker symbol.Under the above mentioned a priori information, the
estimator xðk=kÞ of the state vector and the covariance ma-trix of errors P(k/k) are found with the help of the optimalKalman filter [20]. Moreover, if the optimal filter is nor-mally operating, then the innovation
mðkÞ ¼ zðkÞ � HðkÞxðk=k� 1Þ ð3Þ
is a white Gaussian noise with zero mean and the covari-ance matrix [11]
E½mðkÞmTðjÞ� ¼ Pm ¼ ½HðkÞPðk=k� 1ÞHTðkÞ þ RðkÞ��1=2;
where xðk=k� 1Þ is the extrapolation value for one step,P(k/k � 1) is the covariance matrix of the extrapolation er-rors, Pðk� 1=k� 1Þ is the covariance matrix of the estima-tion errors in the preceding step.
We consider changes in the properties of the system orthe characteristics of the perturbations (faults of the mea-suring devices, abnormal measurements, changes in thestatistical characteristics of noises of the object or the mea-surements, etc.) which lead to a change in the covariancematrix of the innovation sequence (3). Consider that thedynamical system (1) and (2) is subjected to suddenchanges. Our purpose is to decide on-line whether achange has occurred or not and while doing this, we usethe generalized Rayleigh quotient [21].
3. The generalized Rayleigh’s quotient based innovationcovariance testing
Let us write the expression for the sample covariancematrix of the innovation m(k):
SðkÞ ¼ 1M � 1
Xk
j¼k�Mþ1
½mðjÞ � �mðkÞ�½mðjÞ � �mðkÞ�T ð4Þ
where
�mðkÞ ¼ 1M
Xk
j¼k�Mþ1
mðjÞ
is the sample mean, and M is the used number of realiza-tions (the width of the sliding window). As is known[14], under the validity of the hypotheses co, the randommatrix
AðkÞ ¼ ðM � 1ÞSðkÞ ð5Þ
has the Wishart distribution with M degrees of freedomand is denoted by WsðM; PmÞ:
A �WsðM; PmÞ; ð6Þ
where s and Pm are the dimension and the covariance ma-trix of the innovation m, respectively.
In testing procedure of the statistical hypotheses, thetest of the Wishart matrix (5) is complicated and not welldeveloped in point of view of the difficulty of confidencedomain construction for a random matrix. In the investi-gated case it is required to test the hypothesis
c0 : A ¼ Pm
against the alternative hypothesis
c1 : A–Pm
In this study a new approach based on the generalizedRayleigh quotient for testing the innovation covariance ofthe Kalman filter is proposed. New results for the general-ized Rayleigh quotient based innovation covariance testingare given below.
Definition. The generalized Rayleigh quotient of the givennon-zero vector L is defined as [23]:
JðLÞ ¼ LT AL
LT PmL; L 2 Rs;A 2 Rs�s; Pm 2 Rs�s; ð7Þ
where A and Pm are the symmetric and positive definitematrices.
Theorem 1. If a random matrix A obeys the Wishart distribu-tion WsðM; PmÞ, then the maximum eigenvalue kmax of thematrix AP�1
m is equal to the maximum value of generalizedRayleigh quotient (7) and has v2 distribution law with Mdegree of freedom:
kmaxðAP�1m Þ ¼ max
LT AL
LT PmL¼ JmaxðLÞ � v2
M ; ð8Þ
Proof. As is known [22], if A �WsðM; PmÞ and L is any fixeds-vector such that LT PmL–0, then the following relationholds
LT AL
LT PmL� v2
M ð9Þ

C. Hajiyev / Measurement 47 (2014) 804–812 807
The eigenvalues of AP�1m are all real, that [23]
kmaxðAP�1m Þ ¼max
LT AL
LT PmL¼ JmaxðLÞ ð10Þ
It can be shown from (10), that the quotient JðLÞ is maxi-mized by selecting L to be the dominant eigenvector ofAP�1
m , and that the maximum value of generalized Rayleighquotient (7) is equal to the largest eigenvalue of the matrixAP�1
m . Taking (9) and (10) into consideration, it will be seenthat kmaxðAP�1
m Þ � v2M , which was to be proved. h
Corollary 1. If A �WsðM; PmÞ, then the spectral radius of thematrix AP�1
m obeys the following distribution law:
qðAP�1m Þ � v2
M ð11Þ
Proof. Since AP�1m is a positive definite matrix, its largest
eigenvalue is equal to the spectral radius qðAP�1m Þ:
qðAP�1m Þ ¼maxfjkiðAP�1
m Þj; i ¼ 1; sg ¼ kmaxðAP�1m Þ ð12Þ
From (8) and (12) the sought expression (11) isobtained. h
Corollary 2. If A �WsðM; PmÞ, then the generalized Rayleighquotients (7) provide lower bounds on the spectral radiusqðAP�1
m Þ of AP�1m , that is
JðLÞ ¼ LT AL
LT PmL6 qðAP�1
m Þ ð13Þ
for every L 2 Rs, such that LT PmL–0, and equality holds in (13)if and only if L is an eigenvector of AP�1
m corresponding toqðAP�1
m Þ.
Proof. The expression (13) is obtained from Eqs. (7), (10),and (12) directly. h
Theorem 2. Let A �WsðM; PmÞ. Then the ratio of the sums ofall the elements of the matrices A and Pm is distributed as
Psi¼1
Psj¼1aijPs
i¼1
Psj¼1rij
� v2M; ð14Þ
where aij and rij are the elements of the matrices A and Pm
respectively.
Proof. As it is known [22], if a random matrix A obeys theWishart distribution WsðM; PmÞ and L is a fixed s-vector,then the relation (9) is met. h
We use the unit s-vector ITs ¼ ð1;1; . . . 1Þ as the vector L.
In this case, the generalized Rayleigh quotients (7) can berepresented in the form of
JðIsÞ ¼ITs AIs
ITs PmIs
ð15Þ
Taking the expression (9) into account the followingrelation can be written:
JðIsÞ � v2M ð16Þ
By substituting ITs AIs ¼
Psi¼1
Psj¼1aij and IT
s PmIs ¼Psi¼1
Psj¼1rij into Rayleigh quotient JðIsÞ in (16) the sought
expression (14) is obtained.By selecting a level of significance as,
Pfv2 > v2a;Mg ¼ a; 0 < a < 1 ð17Þ
So from the equation above, the threshold value v2a;M will
be determined. Under the validity of the hypotheses c1,the left hand side of the expressions (8), (11) and (16)tends to exceed the threshold value v2
a;M .In application to fault detection problem, let us accept
that when the hypotheses co is true, then the estimationsystem is normally operating, in the contrary, when thealternatife hypotheses c1 is true, then there is a fault inthe system. Then the decision rules on the current stateof the system of estimation with respect to the introducedhypotheses will be written in the following forms:
co : JmaxðLÞ ¼ kmaxðAP�1m Þ 6 v2
a;M fault free
c1 : kmaxðAP�1m Þ > v2
a;M with faultð18Þ
or
c0 : JðIsÞ 6 v2a;M fault free
c1 : JðIsÞ > v2a;M with fault
ð19Þ
Thus, from the computational point of view, the faultdetection algorithm is reduced to the comparison of thegeneralized Rayleigh quotient, which are calculated onthe basis of a representative sample and v2
a;M , and fulfill-ment of a decision on the basis of the appropriate decisionrule from (18) and (19).
4. EKF for F-16 aircraft model estimation
The above covariance matrix testing algorithms are ap-plied to multi-input multi-output model of an AFTI/F-16fighter aircraft. The nonlinear mathematical model forthe longitudinal and lateral motion of F-16 fighter is asfollows:
xðkþ 1Þ ¼ AxðkÞ þ BuðkÞ þ FðxðkÞÞ þ GwðkÞ ð20Þ
where x(k) is the 9-dimensional state vector of the aircraft,A is the transition matrix of the aircraft with the order of9 � 9, B is the control distribution matrix of the aircraftwith the order of 9 � 6, uðkÞ is the 6-dimensional controlinput vector, F(x(k)) is the 9-dimensional vector of nonlin-ear elements of the system, G is the transition matrix of thesystem noises, and w(k) is the random 9-dimensional sys-tem noise vector with zero mean and the correlation ma-trix of E½wðkÞwTðjÞ� ¼ QðkÞdðjkÞ.
The aircraft state variables are:
x ¼ ½v;a; q; h;b; p; r;u;w�T ;
where v is the forward velocity, a is the angle of attack, q isthe pitch rate, h is the pitch angle, b is the side-slip angle, pis the roll rate, r is the yaw rate, u is the roll angle, and w isthe yaw angle.

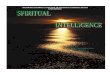
Fig. 1. Behavior of the generalized Rayleigh quotient JmaxðLÞ in case of
808 C. Hajiyev / Measurement 47 (2014) 804–812
The fighter has six control surfaces and hence six con-trol inputs. These are:
u ¼ ½dHR; dHL; dFR; dFL; dC ; dR�;
where dHR and dHL are the deflections of the right and lefthorizontal stabilizers, dFR and dFL are the deflections ofthe right and left flaps, dC and dR are the canard and rudderdeflections.
The measurement equations can be written as:
zðkÞ ¼ HxðkÞ þ VðkÞ; ð21Þ
Here H is the measurement matrix, which is 9 � 9 unitmatrix in case, and V(k) is the 9-dimensional vector ofmeasurement noises, where its mean and covariance ma-trix respectively are:
E½VðkÞ� ¼ 0; E½VðkÞVTðjÞ� ¼ RðkÞdðjkÞ:
By using quasi-linearization method, let us linearizeEq. (20):
xðkÞ ¼ Axðk� 1Þ þ Buðk� 1Þ þ Fðxðk� 1ÞÞ þ A½xðk� 1Þ� xðk� 1Þ� þ Fxðk� 1Þ½xðk� 1Þ � xðk� 1Þ�þ B½uðk� 1Þ � uðk� 1Þ� þ Gwðk� 1Þ ð22Þ
where Fx ¼ @F@x
� �xðk�1Þ.
The following recursive Extended Kalman Filter (EKF)algorithm for the state vector estimation of the F-16 fightermotion is obtained in [24]:
xðkÞ ¼ Axðk� 1Þ þ Buðk� 1Þ þ Fðxðk� 1ÞÞþ PðkÞHT R�1ðkÞ � fzðkÞ � H½Axðk� 1Þþ Buðk� 1Þ þ Fðxðk� 1ÞÞ�g
ð23Þ
PðkÞ ¼ MðkÞ �MðkÞHT ½RðkÞ þ HMðkÞHT ��1HMðkÞ ð24Þ
MðkÞ ¼ APðk� 1ÞAT þ BDuðk� 1ÞBT þ Fxðk� 1Þ� Pðk� 1ÞFT
x ðk� 1Þ þ GQðk� 1ÞGTð25Þ
where P(k) is the covariance matrix of the estimation error,M(k) is the covariance matrix of the extrapolation error,and Du is the covariance matrix of the control input error.
5. Sensor/actuator fault detection simulation results
On the basis of the obtained results, two fault detectionalgorithms are examined in simulations. The first faultdetection algorithm is based on the computation of thelargest eigenvalue of the matrix AP�1
m . The second algo-rithm is based on the calculation of the generalized Ray-leigh quotient (15) i.e., the ratio of the sums of all theelements of the matrices A and Pm is used for the faultdetection purpose. Let us call the first algorithm as,JmaxðLÞ quotient based algorithm and the second one as,JðIsÞ quotient based algorithm and show that one can de-tect the faults that appear in F-16 aircraft model (20) and(21) on the basis of these algorithms in a timely manner.Measurements are processed using the EKF (23-25). Theexpression for the innovation of EKF is
mðkÞ ¼ zðkÞ � H½Axðk� 1Þ þ Buðk� 1Þ þ Fðxðk� 1ÞÞ� ð26Þ
In order to detect changes in the innovation covariance,generalized Rayleigh quotients (10) and (15) given aboveare used. In the simulations, M, s and a are taken asM = 20, s = 9, and a = 0.05, and the threshold value v2
a;M isfound as 31.41. The following cases are examined:
5.1. A sensor fault in the system
To verify the efficiency of the proposed algorithms,beginning from the step k = 200, a fault in the third mea-surement channel (pitch rate gyroscope fault) is simulated.The noise variance of the pitch rate gyroscope is changedas follows:
zqðkÞ ¼ zqðkÞ þ 2vqðkÞ; ðk P 200Þ: ð27Þ
Fig. 1 shows the behavior of the generalized Rayleighquotient JmaxðLÞ for this case. As is expected, until the200th step JmaxðLÞ < 31:41 at all points. Plots show thatafter the 200th step the value of the quotient JmaxðLÞ growsabruptly, and at the step k = 204 (0.12 s after the fault oc-curs) it exceeds its admissible bound. As a result, the faultin the system is detected using the decision rule (18).
Similar simulation results for the air speed indicatorand angle of attack sensor are presented in Figs. 2 and 3respectively. In simulations the measurement noises inthe investigated aircraft sensors are changed by multiply-ing them with 2, i.d. the standard deviations of the mea-surement noises increase 2 times. Consequently therange of the random measurement noises increases 2times too. Because of randomness of measurement noises,the simulated measurements of the appropriate sensormay be from the ‘‘good’’ sample range (for example corre-sponding to normal standard deviation) or ‘‘bad’’ one (cor-responding to increased standard deviation). Consequentlythe realizations of the innovation sequences entering tothe sample covariance matrix (4) may be from the ‘‘good’’or ‘‘bad’’ samples. As a result, the values of the monitoringgeneralized Rayleigh quotients JmaxðLÞ increase when the‘‘bad’’ sample is used in the expression (4), and decreasewhen the ‘‘good’’ sample is used in the (4). This effect isnatural when the covariance matrix is tested. Therefore,
changes in the noise variance of the pitch rate gyroscope.

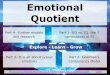
Fig. 2. Behavior of the generalized Rayleigh quotient JmaxðLÞ in case ofchanges in noise variance in the air speed indicator (fault occurs atiteration 200, detection time: 3 iterations (0.09 s)).
Fig. 3. Behavior of the generalized Rayleigh quotient JmaxðLÞ in case ofchanges in noise variance in the angle of attack sensor (fault occurs atiteration 200, detection time: 21 iterations (0.63 s)).
Fig. 4. Behaviour of the generalized Rayleigh quotie JmaxðLÞ in case ofcontrol surface fault.
C. Hajiyev / Measurement 47 (2014) 804–812 809
the monitoring quotients may exceed their admissiblebound and after certain iterations may drop significantlybelow the admissible bound. This movement can be ob-served from Figs. 1–3. The decision about fault detectioncan be made after the first exceeded admissible bound (ifit is not false alarm).
Considered sensor faults may be caused by abnormalmeasurements, friction between the moving parts of thesensors and other difficulties such as the decrease of theinstrument accuracy, and the increase of the backgroundnoise etc.
5.2. An actuator fault in the system
Two kinds of fault can occur in an actuator: actuatorsurface fault; actuator motor fault.
The proposed fault detection algorithms are used belowto detect the actuator surface faults. The control deriva-tives that correspond to the first control surface (right
horizontal stabilizer) have been changed at iteration 200as follows;
Bf ði;1Þ ¼ Bði;1Þ � 0:2; i ¼ 1;9 ð28Þ
As seen from expression (28), in this case the reductionin effectiveness of the faulty right horizontal stabilizer is80%. The behavior of the generalized Rayleigh quotientJmaxðLÞ when the control derivatives are changed is givenin Fig. 4. As it is presented in Fig. 4, JmaxðLÞ is lower thanthe threshold until the change of the control derivatives.In contrast, when the control derivatives are changed,JmaxðLÞ increases, and at the step k = 300 (3 s after fault oc-curs) it exceeds its admissible bound. As a result, the faultin the system is detected via the decision rule (18).
This fault causes a change in the mean and the covari-ance of the innovation sequence.
The change of the control derivatives (elements of thecontrol distribution matrix B) may be caused by the faultssuch as the reduction in the control surface/actuator effec-tiveness, the friction between the moving parts of the con-trol surfaces, partial loss of a control surface (break off of apart of control surface) etc.
In the Appendix A the innovation covariance is testedby using generalized Rayleigh quotient of the identity vec-tor JðIsÞ. The sensor (pitch rate gyroscope, air speed indica-tor and angle of attack sensor) and the actuator (righthorizontal stabilizer) faults in the system are considered.The sensor and the actuator faults are simulated viaexpressions (27) and (28) respectively. Simulation resultsare presented in Figs. A.1–A.4 of the Appendix A. Compar-ison of the innovation covariance testing results obtainedvia generalized Rayleigh quotients JmaxðLÞ and JðIsÞ are gi-ven in Table 1. The presented results show that the faultdetection time of the JmaxðLÞ based algorithm is signifi-cantly lesser than JðIsÞ based algorithm, as it was expected.
Comparison of the proposed JmaxðLÞ and JðIsÞ quotientsbased algorithms on the detected minimum sensor/actua-tor fault rate is performed by using the innovation covari-ance testing simulation results. Obtained results show thatdetected minimum fault rate for different aircraft sensors(pitch rate gyro, air speed indicator, angle of attack sensor,

Table 1Comparison of the JmaxðLÞ and JðIsÞ quotients based algorithms on the faultdetection times.
Fault type Fault detection time(s) (quotient JmaxðLÞis used)
Fault detection time(s) (quotient JðIsÞis used)
Pitch rate gyroscopenoise increment
0.12 1.83
Air speed indicatornoise increment
0.09 0.33
Angle of attack sensornoise increment
0.63 2.13
Right horizontalstabilizer shift
3 8.04
Fig. A.1. Behavior of the generalized Rayleigh quotient of the identityvector JðIsÞ in case of changes in the noise variance of the pitch rategyroscope (fault occurs at iteration 200, detection time: 61 iterations(1.83 s)).
Fig. A.2. Behavior of the generalized Rayleigh quotient of the identityvector JðIsÞ in case of changes in noise variance in the air speed indicator(fault occurs at iteration 200, detection time: 11 iterations (0.33 s)).
Fig. A.3. Behavior of the generalized Rayleigh quotient of the identityvector JðIsÞ in case of changes in noise variance in the angle of attacksensor (fault occurs at iteration 200, detection time: 71 iterations(2.13 s)).
Fig. A.4. Behavior of the generalized Rayleigh quotient of the identityvector JðIsÞ in case of control surface fault (fault occurs at iteration 200,detection time: 268 iterations (8.04 s)).
810 C. Hajiyev / Measurement 47 (2014) 804–812
pitch angle gyro, side-sleep angle sensor, roll rate gyro,yaw rate gyro, roll angle gyro and yaw angle gyro) changesin the interval 0.8–1.5% of the standard deviation of themeasurement noises when the JmaxðLÞ quotient based
algorithm is used. Detected minimum fault rate for exam-ined sensors is 5% of the standard deviation of the mea-surement noises when the JðIsÞ quotient based algorithmis used.
The performed simulations show that detected mini-mum actuator fault rate (reduction in effectiveness) forcontrol surfaces (right horizontal stabilizer, left horizontalstabilizer, right flap, left flap, canard and rudder) changesin the interval 0.2–1% when the innovation covariance istested via JmaxðLÞ quotient based algorithm. Detected min-imum actuator fault rate for examined control surfaces is5–10% when JðIsÞ quotient based algorithm is used.
The analysis of the obtained results shows that theJmaxðLÞ quotient based algorithm, which tests the largesteigenvalue of the matrix AP�1
m is more effective than theJðIsÞ quotient based one, which tests the ratio of the sumsof all the elements of the matrices A and Pm in the senseof the fastest detection of a fault and the detected mini-mum fault rate. This algorithm can rapidly detect even

C. Hajiyev / Measurement 47 (2014) 804–812 811
very small sensor/actuator changes and it is convenient forreal-time fault detection. The algorithm is recommendedwhen miss-failure is of significant danger, and false-alarmis of low danger.
The JðIsÞ quotient based algorithm cannot detect verysmall changes, but can detect small changes in the measure-ment channels and the actuators. This algorithm is recom-mended when miss-failure is of little danger, and false-alarm is of significant danger. This algorithm may be alsoused when miss-failure and false-alarm have equal level ofdanger.
Note that the inertia (the delay) of fault detection de-pends on the number of the samples (the width of thesliding window) M in this case and with an increase inthis number, this characteristic worsens. On the otherhand, a very small value of M leads to the frequent falsefaults. Furthermore, the estimates of the sample mean,the sample covariance matrix and consequently, the val-ues of the generalized Rayleigh quotients JmaxðLÞ andJðIsÞ, in general, will be biased for small sample sizes. Lessunlikely, larger width of the sliding window causes thebias of the estimates. However, larger estimation windowreduces the ability of the algorithm to trace the high-fre-quency changes of the trajectory correctly, e.g. turns [25].Therefore, the trade-off between the bias, the frequentfalse faults on the one hand and the tractability of theestimates, the bad inertia characteristic of the fault detec-tion on the other hand should be taken into accountaccording to the application at hand. In addition, theproper choice of the sliding window size depends signifi-cantly on the motional dynamics.
The introduction of the developed fault detectionalgorithms does not distort the estimation results of thefilter and has no influence on their accuracy.
6. Conclusion
In this paper an approach for testing the innovationcovariance of the Kalman filter is proposed. The proposedapproach is based on the generalized Rayleigh quotientof the vector L under the sample ðAÞ and theoretical ðPmÞinnovation covariance matrices, which has v2 distributionunder the normal operation conditions of the system. Theoptimization process of testing quality is reduced to theclassical problem of maximization of the generalized Ray-leigh quotient. From the computational point of view, theproposed fault detection algorithms are reduced to thecomparison of the generalized Rayleigh quotient, whichare calculated on the basis of a representative sample,and quotient’s bounds, and fulfillment of a decision onthe basis of the presented decision rules.
The suggested approach to the innovation covariancetesting is used for the sensor/actuator fault detection prob-lem in the AFTI/F-16 aircraft flight control system. Changesin the noise variance of the sensors (sensor fault) and thecontrol derivatives (control surface fault), that affect thecharacteristics of the innovation of the EKF are examined.The theoretical results are confirmed by the simulationscarried out on the nonlinear dynamic model of the F-16fighter. The introduction of the developed fault detection
algorithms does not distort the estimation results of theEKF and has no influence on their accuracy.
Comparison of the proposed generalized Rayleigh quo-tients based algorithms for testing the innovation covari-ance is performed in the sense of the fastest faultdetection and the detected minimum fault rate. The analy-sis of the obtained results shows that the maximum gener-alized Rayleigh quotient based fault detection algorithm ismore effective in the sense of the fastest detection of afault and the detected minimum fault rate.
Appendix A
Test results for the Rayleigh quotients of the identityvector JðIsÞ (see Figs. A.1–A.4).
References
[1] C. Hajiyev, F. Caliskan, Fault Diagnosis and Reconfiguration in FlightControl Systems, Kluwer Academic Publishers, Boston, 2003.
[2] Y. Zhang, X.R. Li, Detection and diagnosis of sensor and actuatorfailures using Interacting Multiple-Model estimator, in: Proceedingsof the IEEE Conference on Decision and Control, 1997, vol. 5, pp.4475–4480.
[3] C. Rago, et al., Failure detection and identification and fault tolerantcontrol using the IMM-KF with applications to the Eagle-Eye UAV,in: Proceedings of the IEEE Conference on Decision and Control,1998, vol. 4, pp. 4208–4213.
[4] P.S. Maybeck, Multiple model adaptive algorithms for detecting andcompensating sensor and actuator/surface failures in aircraft flightcontrol systems, International Journal of Robust and NonlinearControl 9 (14) (1999) 1051–1070.
[5] E.C. Larson, et al., Model-based sensor and actuator fault detectionand isolation, in: Proceedings of the American Control Conference,2002, vol. 5, pp. 4215–4219.
[6] M.R. Napolitano et al., Online learning neural architectures andcross-correlation analysis for actuator failure detection andidentification, International Journal of Control 63 (3) (1996) 433–455.
[7] M. Borairi, H. Wang, Actuator and sensor fault diagnosis of non-linear dynamic systems via genetic neural networks and adaptiveparameter estimation technique, in: Proceedings of the IEEEConference on Control Applications, 1998, vol. 1, pp. 278–282.
[8] A. Alessandri, Fault diagnosis for nonlinear systems using a bank ofneural estimators, Computers in Industry 52 (3) (2003) 271–289.
[9] G. Cheng et al., Gear fault identification based on Hilbert–Huangtransform and SOM neural network, Measurement 46 (2013) 1137–1146.
[10] N. Subrahmanya, Y.C. Shin, A data-based framework for faultdetection and diagnostics of non-linear systems with partial statemeasurement, Engineering Applications of Artificial Intelligence 26(2013) 446–455.
[11] R.K. Mehra, J. Peschon, An innovations approach to fault detectionand diagnosis in dynamic systems, Automatica 7 (1971) 637–640.
[12] C.M. Gadzhiyev, Check of the generalized variance of the Kalmanfilter updating sequence in dynamic diagnosis, Automation andRemote Control 55 (8) (1994) 1165–1169.
[13] C. Hajiyev, F. Caliskan, Sensor and control surface/actuator failuredetection and isolation applied to F-16 flight dynamics, AircraftEngineering and Aerospace Technology: An International Journal 77(2005) 152–160.
[14] T.W. Anderson, An Introduction to Multivariate Statistical Analysis,second ed., John-Wiley & Sons Inc., New York, USA, 1984.
[15] R.K. Malik, The pseude-Wishart distribution and its application toMIMO systems, IEEE Transactions on Information Theory 49 (2003)2761–2769.
[16] A. Zanella, M. Chiani, M.Z. Win, A general framework for thedistribution of the eigenvalues of Wishart matrices, in:Proceedings of the ICC-2008 Conference, 2008, pp. 1271–1276.
[17] A. Edelman, The distribution and moments of the smallesteigenvalue of a random matrix of Wishart type, Linear Algebra andits Applications 159 (1991) 55–80.

812 C. Hajiyev / Measurement 47 (2014) 804–812
[18] R. Everson, R. Stephen, Inferring the eigenvalues of covariancematrices from limited noisy data, IEEE Transactions on SignalProcessing 48 (2000) 2083–2091.
[19] C. Hajiyev, Tracy-Widom distribution based fault detectionapproach: application to aircraft sensor/actuator fault detection,ISA Transactions, The Journal of Automation 51 (1) (2012) 189–197.
[20] R.E. Kalman, A new approach to linear filtering and prediciton problems,ASME Journal of Basic Engineering 82 (Series D) (1960) 35–45.
[21] Ch. Hajiyev, Generalized Rayleigh quotient based sensor/actuatorfault detection, in: Proceedings of the 8th IFAC SymposiumSAFEPROCESS-2012: Fault Detection, Supervision and Safety forTechnical Processes, Mexico City, Mexico, 2012, pp. 174–179.
[22] K.V. Mardia, J.T. Kent, J.M. Bibby, Multivariate Analysis, AcademicPress, London, UK, 1997.
[23] R.O. Duda, P.E. Hart, D.G. Stork, Pattern Classification, second ed., AWiley-Interscience Publication, 2001.
[24] F. Caliskan, C. Hajiyev, Actuator failure detection and reconfigurablecontrol for F-16 aircraft model, in: Proceedings of the 3rd IFACWorkshop ‘‘Automatic Systems for Building the Infrastructure inDeveloping Countries’’ (DECOM-TT 2003), Istanbul, Turkey, 2003,pp. 231–236.
[25] A.H. Mohamed, K.P. Schwarz, Adaptive Kalman filtering for INS/GPS,Journal of Geodezy 73 (1999) 193–203.