Embed Size (px)
Citation preview
GENERALIZED PICARD CONDITION ANALYSIS
FOR ESTIMATING PARAMETERS IN THE SPLIT
BREGMAN ALGORITHM FOR NOISY DATA
Rosemary Renauthttp://math.asu.edu/˜rosie
SIAM IMAGING
MAY, 2012THANKS TO:
OCCAM OXFORD AND CHARLES UNIVERSITY PRAGUE
Outline
BackgroundSplit Bregman AlgorithmRelationship to Tikhonov Regularization
The SVD SolutionPicard Condition for Ill-Posed ProblemsTruncating the SVDFiltering the SVD
Generalized regularizationThe GSVD for examining the Tikhonov SolutionDiscrete Picard Condition for the GSVD
Regularization Parameter Estimation for TVExamining the GSVD iterates
Conclusions and Future
Ill-Posed Problem Solution with Reguarization by TV with SB
SolveAx ≈ b
for ill-conditioned problems with b perhaps noise contaminated.Consider formulation where d ≈ Lx
(x,d) = arg minx,d{1
2‖Ax− b‖22 +
λ2
2‖d− Lx‖22 + µ‖d‖1}
Alternating minimization separates steps for d from x
Various versions of the iteration can be defined. Fundamentally:
S1 : x(k+1) = argminx{12‖Ax− b‖22 +
λ2
2‖Lx− (d(k+1) − g(k))‖22} (1)
S2 : d(k+1) = argmind{λ
2
2‖d− (Lx(k+1) + g(k))‖22 + µ‖d‖1} (2)
S3 : g(k+1) = g(k) + Lx(k+1) − d(k+1). (3)
The Tikhonov Step of the Algorithm
S1 : x(k+1) = arg minx{1
2‖Ax− b‖22 +
λ2
2‖Lx− (d(k+1) − g(k))‖22}
Equivalently we have
Update for x:
x = arg minx{1
2‖Ax− b‖22 +
λ2
2‖Lx− h‖22}, h = d− g
Standard least squares update using a Tikhonov regularizer.To determine the stability we analyze this step of the algorithmTake advantage of parameter estimation techniques to find λFirst look carefully at the background
Spectral Decomposition of the Solution: The SVD
Consider general overdetermined discrete problem
Ax = b, A ∈ Rm×n, b ∈ Rm, x ∈ Rn, m ≥ n.
Singular value decomposition (SVD) of A (full column rank)
A = UΣV T =
n∑i=1
uiσivTi , Σ = diag(σ1, . . . , σn).
gives expansion for the solution
x =
n∑i=1
uTi b
σivi
ui, vi are left and right singular vectors for ASolution is a weighted linear combination of the basis vectors vi
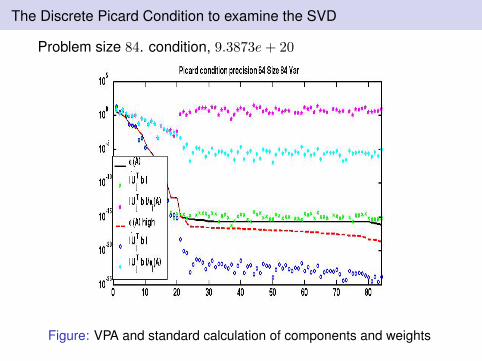
The Discrete Picard Condition to examine the SVD
Problem size 84. condition, 9.3873e+ 20
Figure: VPA and standard calculation of components and weights
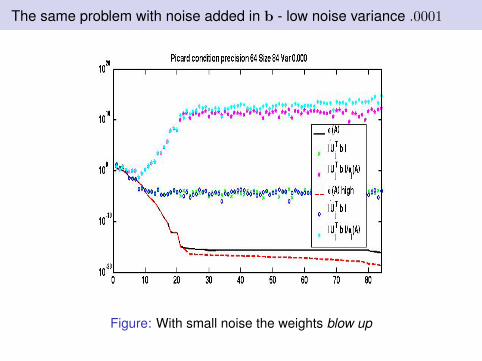
The same problem with noise added in b - low noise variance .0001
Figure: With small noise the weights blow up
Weights of the expansion are contaminated by noise
Recall
x =
n∑i=1
uTi b
σivi
From high precision calculation ill-posed problem σi decayexponentially to zero (down to machine precision)Discrete Picard condition: consider ratios
|uTi b|/σi
When |uTi b levels out at the noise level the ratios blow up.We may obtain solutions by truncating the SVD
x =k∑i=1
uTi b
σivi
Now parameter k is a regularization parameter
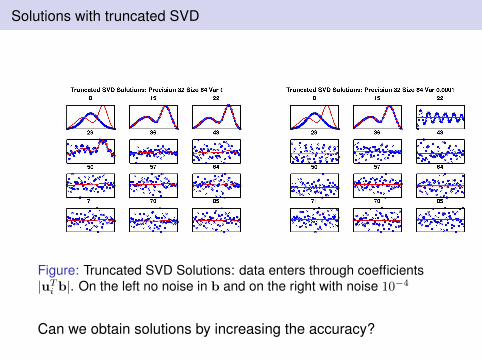
Solutions with truncated SVD
Figure: Truncated SVD Solutions: data enters through coefficients|uT
i b|. On the left no noise in b and on the right with noise 10−4
Can we obtain solutions by increasing the accuracy?
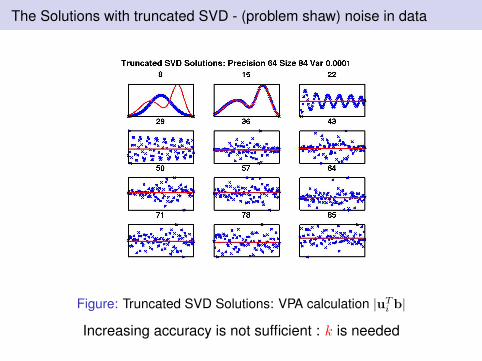
The Solutions with truncated SVD - (problem shaw) noise in data
Figure: Truncated SVD Solutions: VPA calculation |uTi b|
Increasing accuracy is not sufficient : k is needed
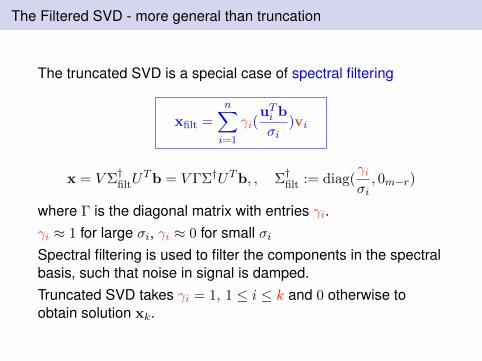
The Filtered SVD - more general than truncation
The truncated SVD is a special case of spectral filtering
xfilt =
n∑i=1
γi(uTi b
σi)vi
x = V Σ†filtUTb = V ΓΣ†UTb, , Σ†filt := diag(
γiσi, 0m−r)
where Γ is the diagonal matrix with entries γi.γi ≈ 1 for large σi, γi ≈ 0 for small σiSpectral filtering is used to filter the components in the spectralbasis, such that noise in signal is damped.Truncated SVD takes γi = 1, 1 ≤ i ≤ k and 0 otherwise toobtain solution xk.
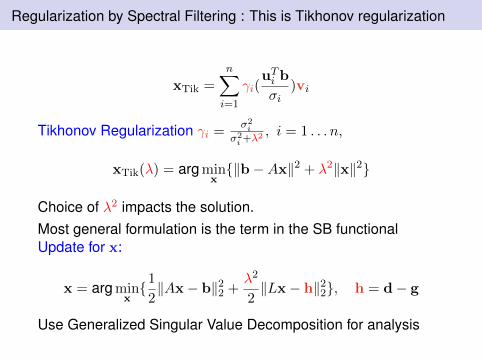
Regularization by Spectral Filtering : This is Tikhonov regularization
xTik =
n∑i=1
γi(uTi b
σi)vi
Tikhonov Regularization γi =σ2i
σ2i +λ2
, i = 1 . . . n,
xTik(λ) = arg minx{‖b−Ax‖2 + λ2‖x‖2}
Choice of λ2 impacts the solution.Most general formulation is the term in the SB functionalUpdate for x:
x = arg minx{1
2‖Ax− b‖22 +
λ2
2‖Lx− h‖22}, h = d− g
Use Generalized Singular Value Decomposition for analysis
The Generalized Singular Value Decomposition
Lemma (GSVD)Assume invertibility and m ≥ n ≥ p. There exist unitarymatrices U ∈ Rm×m, V ∈ Rp×p, and a nonsingular matrixZ ∈ Rn×n such that
A = U
[Υ
0(m−n)×n
]ZT , L = V [M, 0p×(n−p)]Z
T ,
Υ = diag(υ1, . . . , υp, 1, . . . , 1) ∈ Rn×n, M = diag(µ1, . . . , µp) ∈ Rp×p,
with
0 ≤ υ1 ≤ · · · ≤ υp ≤ 1, 1 ≥ µ1 ≥ · · · ≥ µp > 0, υ2i + µ2
i = 1, i = 1 : p.
Solution in terms of the GSVD Basis
x(k+1) = arg minx{1
2‖Ax− b‖22 +
λ2
2‖Lx− h(k)‖22}
Update for x: using the GSVD
x(k+1) =
p∑i=1
νiuTi b + λ2µiv
Ti h
(k)
ν2i + λ2µ2
i
zi +
n∑i=p+1
(uTi b)zi
A weighted combination of basis vectors zi: weights
(i)ν2i
ν2i + λ2µ2
i
uTi b
νi(ii)
λ2µ2i
ν2i + λ2µ2
i
vTi h(k)
µi
Notice (i) is fixed by b, but (ii) depends on the updates h(k)
If (i) dominates (ii) solution will converge slowly or not at allλ impacts the solution and must not over damp (ii)
Solution Lx
Solution for x
x(λ) =
p∑i=1
(νiu
Ti b
ν2i + λ2µ2
i
+λ2µiv
Ti h
(k)
ν2i + λ2µ2
i
)zi +
n∑i=p+1
(uTi b)zi
Solution for Lx
Lx(λ) =
p∑i=1
(νiµiu
Ti b
ν2i + λ2µ2
i
+λ2µ2
ivTi h
(k)
ν2i + λ2µ2
i
)vi
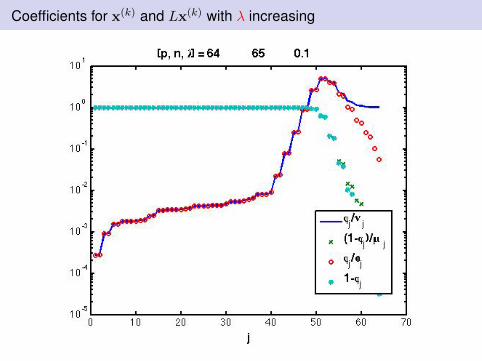
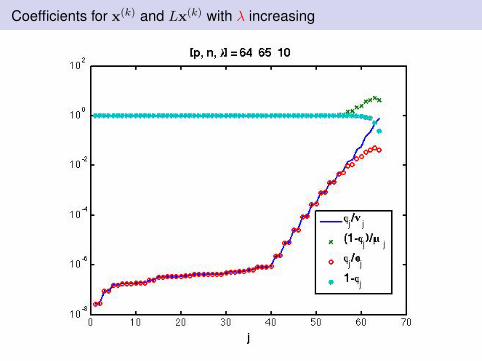
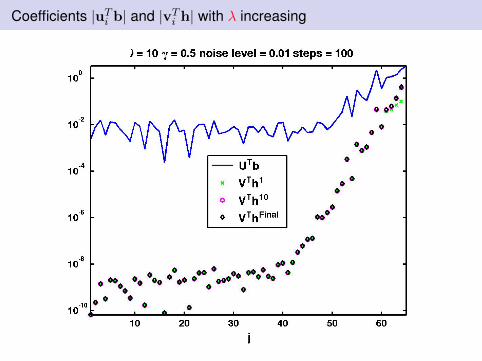
Clearly important that the terms also in Lx(λ) are not overdamped - this determines the shrinkage step Let φi =
ν2iν2i +λ2µ2i
x(k+1) =
p∑i=1
(φiuTi b
νi+ (1− φi)
vTi h(k)
µi)zi +
n∑i=p+1
(uTi b)zi
Lx(k+1) =
p∑i=1
(φiµiνi
(uTi b) + (1− φi)vTi h(k))vi.
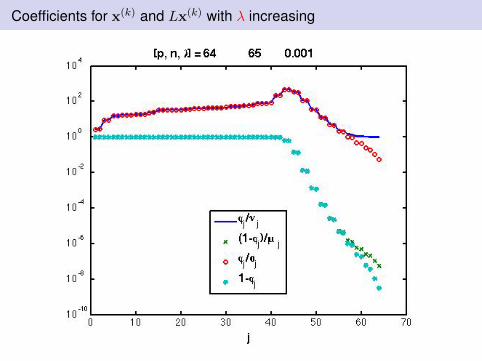
Coefficients for x(k) and Lx(k) with λ increasing
Coefficients for x(k) and Lx(k) with λ increasing
Coefficients for x(k) and Lx(k) with λ increasing
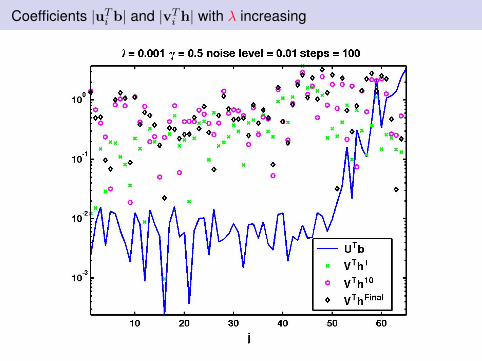
Coefficients |uTi b| and |vTi h| with λ increasing
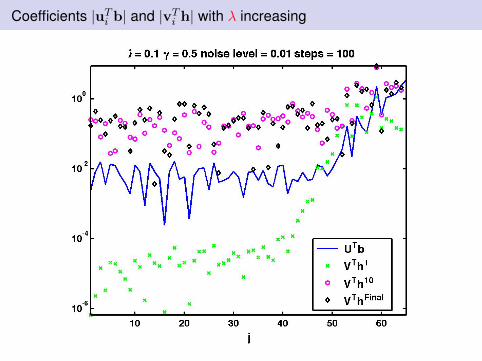
Coefficients |uTi b| and |vTi h| with λ increasing
Coefficients |uTi b| and |vTi h| with λ increasing
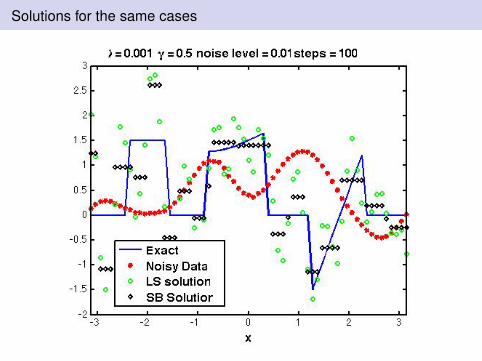
Solutions for the same cases
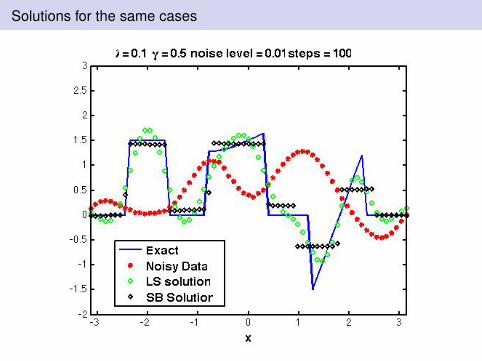
Solutions for the same cases
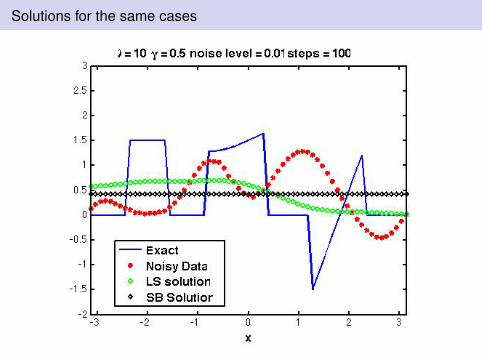
Solutions for the same cases
Observations: I
Discrete Picard condition analysis is relevantThe weights on both x and Lx are crucial to avoid stagnationλ needs to be chosen appropriatelyWealth of possibilities for choosing λ from standard Tikhonovregularization.Examples here will use Unbiased Predictive Risk Estimation -assume variance of noise in b is known.
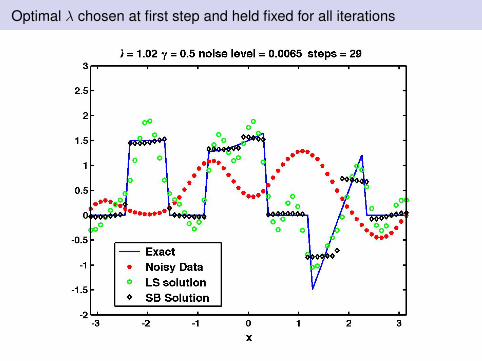
Optimal λ chosen at first step and held fixed for all iterations
Observation II
For regularization in general the choice of λ depends on theright hand side vectorIn this case h changes each step.Thus we might update λ each step.We use standard approach - Unbiased Predictive RiskEstimation and L-CurveWe also use iteratively reweighted norm approach for the dupdate (IRN)SB UPRE uses the estimated λ from UPRE for all SB steps.Update SB, updates λ each step.SB IRN updates and iteratively reweights ‖d‖1.
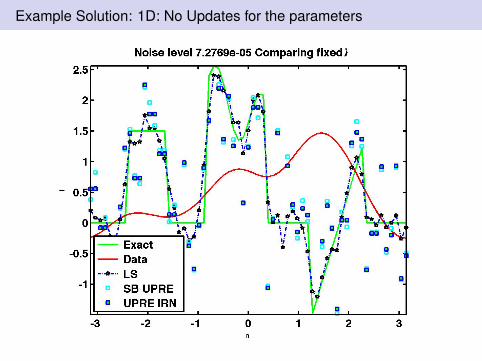
Example Solution: 1D: No Updates for the parameters
Figure: γ = 200 Low noise. Without updating λ left and updated right.SB UPRE uses the estimated λ from UPRE for all SB steps. UpdateSB, updates λ each step. SB IRN updates and iteratively reweights‖d‖1.
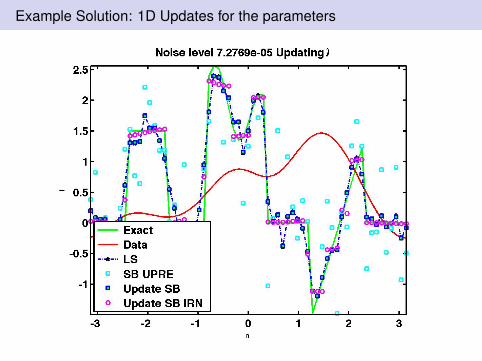
Example Solution: 1D Updates for the parameters
Figure: γ = 200 Low noise. Without updating λ left and updated right.SB UPRE uses the estimated λ from UPRE for all SB steps. UpdateSB, updates λ each step. SB IRN updates and iteratively reweights‖d‖1.
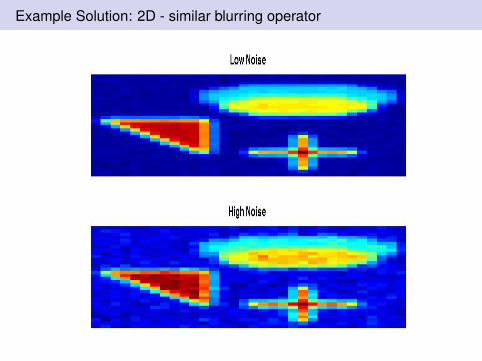
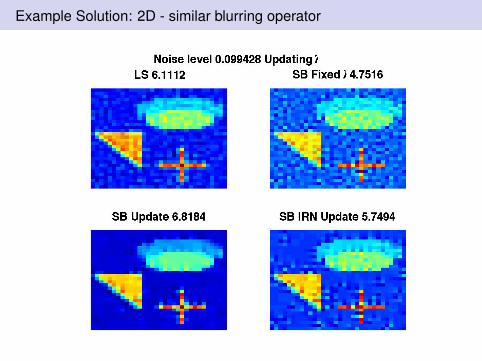
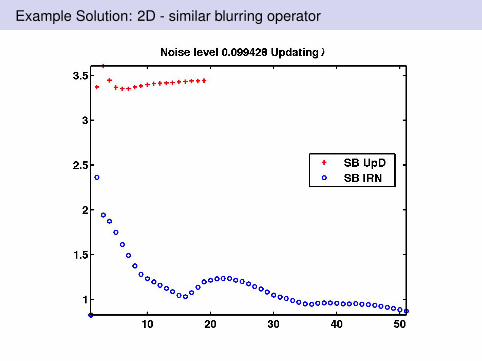
Example Solution: 2D - similar blurring operator
SB with updated λ is useful: This uses fixed ratio λ2/µ = 5
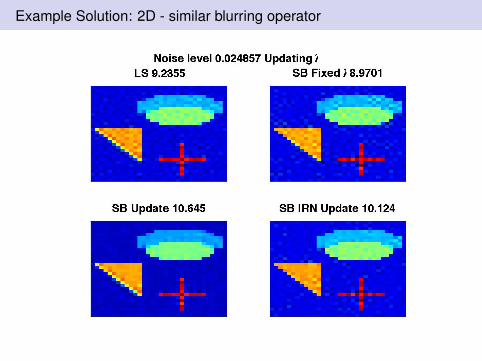
Example Solution: 2D - similar blurring operator
SB with updated λ is useful: This uses fixed ratio λ2/µ = 5
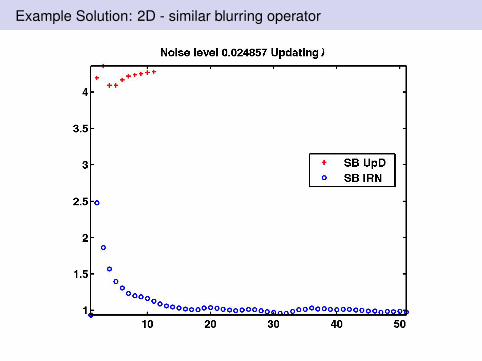
Example Solution: 2D - similar blurring operator
SB with updated λ is useful: This uses fixed ratio λ2/µ = 5
Example Solution: 2D - similar blurring operator
SB with updated λ is useful: This uses fixed ratio λ2/µ = 5
Example Solution: 2D - similar blurring operator
SB with updated λ is useful: This uses fixed ratio λ2/µ = 5

Example Solution: 2D - a projection case
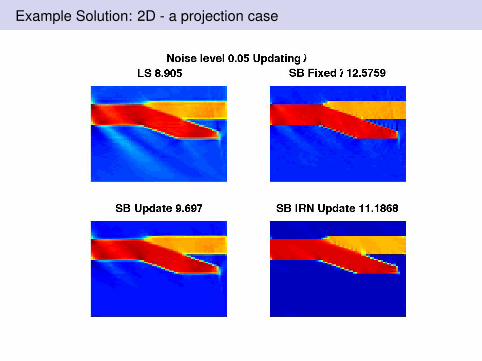
Example Solution: 2D - a projection case

Example Solution: 2D - a projection case
Further Observations and Future Work
Results demonstrate basic analysis of problem isworthwhile
Parameter estimation from basic LS should be used to findappropriate parameter at least at step 1
Overhead of optimal λ for the first step - reasonableOverhead of subsequent steps - UPRE requires matrix trace
- but can be optimized, or use χ2 approach Takesaccount of covariance on h
Convergence testing is based on h.IRN Reweighting needs some further work - converges
too slowlyFuture validate heuristics for more practical cases.
PSF Fourier Analysis for Decomposition of the Solution.








![Edge Preserving and Noise Reducing Reconstruction for ... · larization. Currently, the state-of-the-art method is based on Tikhonov regularization [3], [7]. As Tikhonov regularization](https://img.pdfslide.us/doc/110x75/5e85fca00ce01a0008253624/edge-preserving-and-noise-reducing-reconstruction-for-larization-currently.jpg)




















