-
8/2/2019 Generalized Eigen Value Decomposition_00328059
1/4
IEEE TENCON'93 / Br i j n g
GENERALIZED EIGENVECTOR DECOMPOSITION METHOD FOR
POLEEXTRACTIONAND GPOFMETHOD
Weidong WANG, Haizhou LI and Youan KEDept. of E. E.,Beijing
Inst. of Tech.100081, Beijing, China
ABSTRACTA method of generalized eigenvectordecomposition (GEVD)
is proposed to used forextracting the poles of radar target by
using theautocorrelation of target late-time impulse responsesin
this paper. Unlike to the g e ne d h d pencil-of-function (GPOF)
method proposed by Hua andSarkar [2], the additive noise in signal
is consideredin this method. And it can be used to evaluate
thepoles when only the amplitude data of multiplefrequency returns
is available. The simulation resultsin this paper illustrate that
the new method hasadvantages over GPOF method in the
noisesensitivity and the computation.
INTRODUCTIONIn the past decades, the pole extraction by usingthe
late-time response of the targets has been thefocus of much
research work. Linear prediction (LP)and GPOF methods were found to
extract the polesfrom an exponentially damped sinusoids. LP
methodtreats the pole extraction as a linear least squareproblem.
GPOF method treats the pole extraction asa general eigen-analysis
problem. But both of themdo not consider the additive noise in
their solutionsto the pole extraction problem. Therefore,
thesemethods can, usually, only be used in the case ofhigh
signal-to -noise ratio.This paper will develop an efficient method
forpole extraction. In its mathematical model, theadditive noise is
considered. Theoretically, thismethod is insensitive to noise. The
simulation resultspresented in this paper illustrate that the new
methodhas better performance than GPOF method.This paper will be
divided into three parts. In part
one, The brief descriptions of GEVD method and itsalgorithm is
presented. In part two, theperformanceof GEVD and GPOF methods are
compared. In partthree, an example of pole extraction from
thetransient response data, which is impulsed by thenarrow Gaussian
pulse and measured practically byour experiment system, s
presented.G E N E R A L I Z E D E I G E N V E C T O RDECOMPOSITION
METHOD FOR ESTIMATINGPOLES1. Theoretical Results
It is well known that a late-time impulse responseh(t) of a
radar target can be describexi as thefollowing sum of exponential
signal
Y
Where ai and ai re the damping coefficient andangular frequency
of the i-th natural mode, a, and 4,are the amplitude and phase of
the i-th natural mode,and pi, p;=ui+aj and ri, I;=&& are
called as thei-th pair of radar target pole and residue
respectively.It is noted that the target poles are
independentwithaspect angles but the target resides am related
toaspect angles. M s the total number of distinctivenatural modes.
In practice, M can be estimatedbasedon the frequency spectrum of
the interrogatingradar pulse. Our goal is to obtain a
noise-insensitiveand accurate method, which is efficiently
determinedby target poles under the presence of noise. Assumethat
the experimentaldataof the radar target impulseresponse h(t) under
the presence of noise isexpressed as
-601 -
-
8/2/2019 Generalized Eigen Value Decomposition_00328059
2/4
where w(n) is a Guassian white noise with zero meanand d
variance. By the simple computation, theautocorrelation r(m) of
target impulse response canbe obtained in the following formr(m) =
~ < m > ~ i t=1,2, ..,"-I (3)
zya, = 5,=1#2,..m (6 )
b l P,+P*
and the correlation matrix asai)= (di ) (i.1) ... di+M2-1) ) M22
W(8 )
In the case hat M,>M, M2 2Mand N>M,+M2-1,
where * equals M1 or M2, To look into theunderlying structure
ofthe these matrices, and basedon the above equation, we can
obtain
To solve the problem of radar target poleestimation, the concept
of generalized eigen-analysisplays an important role in the
process. The generaleigcn-analysis of singular matrix pair
{B(i),B(j)} isformally defined by
R (&?e = A, &I%, i=l, 2, ...,W (14)The knowledge of the
eigenvalue can be seen toconvey important information concerning
the targetpoles. Hence, we can obtain the following
theorem.[Theorem] The M nonzero eigenvalues of theabove
eigen-analysis system a, espectively,expressed as
The proof of the above theorem can easily beobtained from the
equation (13). The theorem makesit clear how to solve the pole
estimation problem ofradar targets. The remainder is how to get
theautocorrelation function r(m) of target impulseresponse. With
exception of the direct computation ofthe auto-correlation from
radar target impulseresponse, Usually, two approaches can also
beadopted:The first is to estimate the autocorrelationr(m) by using
the amplitude I (oJ I' in multiplefrequency radar. The sccond is to
calculate theautocorrelation r(m) by using the &ved signal
innoise radar. In the following, a simple algorithm forestimating
poles is presented.2. Eigenvector Decomposition Method forComputing
Generalized Eigenvalues
To develop and illustrate the use of algorithm forcomputing
generalized eigenvalues of the matrix pairproblem, we can write the
correlation matrix BO)into the following form of matrix
eigenvectordecompositionB O - U A V B (16)
where the superscript H denotes the complexconjugate operator. A
s the dwwhich consist of thenonzero eigenvalues of Bo), and is
thecorresponding unitary matrix.Calculate the followingmatrix
as
From the above equation, it can be seen that the
- 602-
-
8/2/2019 Generalized Eigen Value Decomposition_00328059
3/4
matrix 3 as the same eigenvalues as the generalizedeigen
analysis equation (14). Note that for noisy dateh(n) the matrix A
should choose the 2M largesteigenvalues of BQ). This can reduce the
effect ofnoise in the signal.According to the equations (7) (8)
(16) and (17),the target poles can be estimated from
theautocorrelation function of its impulse. response.
SIMULATION RESULTSIn order to facilitate comparison to
previouspublished GPOF method, In this section, an exampleextracted
from [2] was chosen for the simulation ofthe noise sensitivities of
GEVD and GPOF methods.Specifically, Thirty data points were
generatedaccording to the model
Yx(n) = CA,sin(o&++,)e-=C (18)
i-1
where n=O, 1 ..., N-1, N=30, M=2, A,=A2=1,and w1=O.2r, w2=O.35r,
41=42=0,a,=O.O2?r,a2=O.035?r. Note that where damping factors
andresonant frequencies are, respectively, normalized bythe
sampling frequency f,= 1/T.For illustrating the noise
sensitivitiesof methods, itis assumed that the additive noise in
the signal x(n)is a white Guassian random sequence with a
varianceof $. Thus, we define the SNR as -lolog($) (dB).The mean
square error (MSE) results of the poleestimates of Monte Carlo
simulation (50 independenttrails) are shown in Fig 1.With
corresponding to the 1-th pair of pole, theCrame-Rao bound for
unbiased estimation, and theperformance curves for GPOF and GEVD
methodsis given in Fig la. It is not difficult to find thatGEVD
method has almost the same performance asGPOF. With corresponding
to the 2-th pair of pole,however, the case will be different. In
Fig lb, theC-R bound for unbiased estimation, and theperformance
curves for the GPOF and GEVdmethods are shown. It is seen that GEVD
method hasbetter performance than GPOF method, andpossesses the
lower bound of SNR than GPOFmethod. And the failure of Hua's GPOF
method toexceed the C-R bound at the low SNR stems fromthe bias in
its estimate, which may probably beattributed to its signal
model.The causal of GEVD's better performance thanGPOF's lies in
the following ways: The first is that .Hermitican data matrices is
approximated with thelower rank ones in GEVD method, but Toeplitz
datamatrices is approximated by the lower rank ones inGPOF method.
The second is that Two computationof EVD is needed in GEVD method,
bu t threecomputation of EVD is needed in GPOF method.
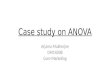
AN APPLICATIONConsider that a EM pulse is generated by
0.84-mdipole antenna of radius0.003-m which impulsed bya narrow
Gaussian pulse with time-width 2 ns and
amplitude 80 v. The EM pulse is received to get atransient
response by using the same antenna. Thistransient response is
measurkd through a digital storeoscillometer (SQ27) with the
sampling interval 0.02ns. Its waveform is shown in Fig. 2. To get
theinstrinsc poles of dipole itself, we only consider asegment of
the transient response for 10.27 to 12.23ns, which consists of 100
sampled data (N=100).Applying GEVD method with MI=M2=N/2=50and M=6
as well as GPOF method with L=N/2=50and M=6 to the 100 sampled
data,we calculate the17 natural modes of the dipole antenna by
using themshown in Tab 1by different approaches for theidentical
measured data. where L is the length of thedipole and c is the
light velocity, and * denote thenon-appearance of the resonant
frequency.With difference of the natural mode number M,GEVD method
yielded the following poles:for M=2, 0.061, -8.6061*9.1182j,for
M=3, -0.4472*12.6479j, -0.1424f 0.5815j,for M =4, -0.0377f 3.4O42j,
-0.03 11f 1.697 j,for M =5, -0.0255f 3.3507j, -0.019 1f
1.6639j,
10.76+ 16.0854j-0.0284f 0.1801j-0.1394f 0.5815j, -0.0274f
0.1800j-0.3595f 8.886Oj, -0.1344f 0.5800j,-0.0259f 0.1806jWith the
difference of the natural mode number M,the corresponding poles are
estimated by usingGPOF method [2] for the same dat in the
followingfor M=2, 0.60, -8.0600f9.1180j,
for M=3, -0.5414&12.9446j, -0.1526f 0,5916j,for M=4,
-0.0979*13.7274j, -0.0713f11.974Oj,for M= 5 , -0.0232*13.6717j,
-0.0539&11.9409j,
34.86+ 16.0856j-0.0319f 0.1823j-0.1514f 0.5915j, -0.0313f
0.1821j,-0.3767f 9.0998j, -0.1458f 0.5905j,-0.0296f .01829jFrom the
above results, the first two pair poles isstable. two estimated
resonant frequencies areobtained to be 0.18 and 0.57 GHz. and some
otherfrequencies also appear with the increase of naturalmode
number.
REFERENCES111 Weidong WANG and Zaigen FANG, "Newalgorithms for
High-resolution array signal ~processing", Pro. ICASSP, Beijing,
1990 '[2] Yingbo HUA and Tapan K.
Sarkar,"GeneralizedPencil-of-function Method for Extracting Poles
of an
- 603-
-
8/2/2019 Generalized Eigen Value Decomposition_00328059
4/4
EM system from Its Transient R esponse",IEE E Trans. Vol. AP-37,
NO.2, 1989Table 1. The Estimated Resonant By Frequencies Various
Algorithms
.-z -0.2-!3 -0.4-0.6-0.8-1
, N \ ,0
----
" ' I L , . . , , . . . .
0c\1
07
0
- 604-