Embed Size (px)
Citation preview

te
, Ca
t cd fdaentatiusfethnl
ueun
ismpo
prouttyasionsi
plaof
.co
Theoretical Population Biology 58, 211�237 (2000)
General Theory of CompetiSpatially-Varying Environm
Peter ChessonSection of Evolution and Ecology, University of California, Davis
Received October 15, 1999
A general model of competitive and apparenenvironment is developed and analyzed to extenenvironment to the spatial case and to elucimechanisms are divided into variation-dependvariation-dependent mechanisms including spthe storage effect. Although directly analogothese spatial mechanisms involve different listorage effect should arise more commonlyrelative nonlinearity should arise less commotional mechanisms occur in the spatial case dof increase of a local population and its local abA limited analysis of these additional mechanthe storage effect and relative nonlinearity andof the earlier mechanisms. The rate of increasequantify coexistence. A general quadratic apcases, divides this rate of increase into contribadmits no other mechanisms, suggesting thavariable environment are fully characterized bThree spatially-implicit models are analyzedtechniques using small variance approximatvarious mechanisms are expressed in terms ofimplicit models include a model of an annualof the lottery model, and a multispecies modelpatchy and ephemeral food. ] 2000 Academic Press
INTRODUCTION
Heterogeneity of populations in space is an importanttopic in ecology: spatial heterogeneity potentially hasmajor roles in the persistence of species, the stability ofpopulations, and the coexistence of interacting species(Hanski and Gilpin, 1997; Tilman, Lehman, et al., 1997;Bascompte and Sole, 1998). In particular, recent resultsfor plant communities from both theoretical (Tilman,1994; Pacala and Levin, 1997; Bolker and Pacala, 1999;Neuhauser and Pacala, 1999) and empirical studies
doi:10.1006�tpbi.2000.1486, available online at http:��www.idealibrary
211
ive Coexistence innts
lifornia 95616
ompetitive interactions in a spatially-variableindings on coexistence in a temporally-variablete new principles. In particular, coexistence
and variation-independent mechanisms withal generalizations of relative nonlinearity andto the corresponding temporal mechanisms,history traits which suggest that the spatialan the temporal storage effect and spatialy than temporal relative nonlinearity. Addi-to spatial covariance between the finite ratedance, which has no clear temporal analogue.s shows that they have similar properties to
otentially may be considered as enlargementsf a species perturbed to low density is used toximation, which is exact in some importantions from the various mechanisms above andopportunities for coexistence in a spatially-these mechanisms within this general model.
illustrations of the general findings and ofs. The contributions to coexistence of the
mple interpretable formulae. These spatially-nt community, a spatial multispecies versionan insect community competing for spatially-
(Rees, Grubb, et al., 1996) imply that an understandingof the effects of spatially local interactions is essential fora proper appreciation of competitive interactions betweenspecies. Spatial environmental variation should have amajor influence on the outcome of local interactions andtheir regional effect according to specific models for avariety of systems (Tilman, 1982; Holt, 1984; Shigesada,1984; Shmida and Ellner, 1984; Iwasa and Roughgarden,1986; Roughgarden and Iwasa, 1986; Pacala, 1987; Ives,1988; Holt, 1997; Klopfer and Ives, 1997). The majority ofattention in models of spatial dynamics, however, has beenconcerned with homogeneous physical environments or
m on
0040-5809�00 K35.00
Copyright ] 2000 by Academic PressAll rights of reproduction in any form reserved.

metapopulation models in which presence�absencevariables are the spatially-local state variables. Thestructure of the physical environment is representedpoorly if at all. Hence, understanding the role of environ-mental variation in space remains a major challenge inspatial ecology (Thomas and Hanski, 1997). In contrast,competitive interactions between species subject totemporal environmental variation (Armstrong andMcGehee, 1976; Chesson and Warner, 1981; Abrams,1984; Namba, 1984; Ebenhoh, 1991; Loreau, 1992) arewell understood theoretically (Chesson, 1994; Chessonand Huntly, 1997). It is the purpose of this article topresent a parallel theory for competitive and apparentcompetitive interactions in space, in the presence ofspatial and spatio-temporal environmental variation.
A defining feature of models of temporal variation ismultiplication over time. In discrete time, populationdynamics may be expressed simply by the equation
Ni(t+1)=*i(t) Ni(t)
which means that the fate of the population is determinedby the product of *i (t) over time, which in many impor-tant situations can be approximated adequately by thet th power of the geometric mean of *i (t) over time. Thekey to understanding temporal models is how variationover time affects this temporal product. In the presence ofspatial variation, local populations are summed overspace to give the total population, and the dynamics ofthe total population involve averaging *i (t) over spaceweighted by local population density (Hassell, May, etal., 1991). In the case of uniform dispersal in space, thisweighted average is equal to the unweighted average, andthe difference between space and time comes down to thedifference between the arithmetic mean over space andthe geometric mean over time of *i (t) or, equivalently,the difference between the behavior of the arithmeticmean of *i (t) over space and the behavior of the arith-metic mean of ln *i (t) over time. With more generaldispersal scenarios, the difference between the weightedaverage in space of *i (t) and the unweighted averagemust be taken into account. These facts mean that thestudy of spatial variation can proceed by comparing theproperties of different sorts of averages. Many results fortemporal variation translate into the spatial context byrelating the appropriate spatial and temporal averages.Indeed, much of the present work involves translatingprior results for the temporal context (Chesson, 1994)
212
into the spatial context. Differences between spatial andtemporal contexts emerge quite simply in terms of theways these different sorts of averages interact withpopulation processes.
The theory developed here is set out in terms of com-petition between a set of species that I shall refer to asa guild (Root, 1967) in an ecological community. Theessential feature of the guild is that the members havemutually negative interactions with each other. Theymay do this because they share resources and experiencecompetition or they may share predators or pathogensand experience apparent competition (Holt and Lawton,1994). Also they may interfere with each other throughvarious behaviors affecting feeding or survival. Suchmutually negative interactions will be lumped together inthe term competition.
Although the emphasis is on spatially implicit models,where explicit representations of regional populationdynamics are available, the effects of limited dispersal arestudied also, and the general theory applies to arbitrarymodes of dispersal. Several different particular spatialmodels are considered and simple multispecies coexistencecriteria are obtained by a quadratic approximationmethod. These particular models are the lottery model inspace, insect aggregation models, and an annual plantmodel.
THE GENERAL MODEL
Individual organisms in the species under considera-tion are assumed affected by the physical environmentand competition (or a generalization of competition asdiscussed above). Variables Ejx and Cjx are assumed toquantify the effects of environment and competitionspecifically for the species j, location x, and time t (avariable that will only be explicitly represented in thenotation when needed for emphasis). For each individualof each species and each location x and time t thesevariables are assumed to define a probability of survivalto time t+1 and an expected number of offspring survivingto time t+1, which together define an individual-levelfinite rate of increase,
*jx=Gj (Ejx , Cjx), (1)
where Gj is a function that combines the effects of thesetwo factors. The quantity Ejx is called an environmen-tally-dependent parameter and is not a direct measure ofthe physical environment, but a population parameterthat depends on the physical environment, such as a
Peter Chesson
survival probability, a germination probability, or anexpected number of offspring. For this reason, it mayalso be called an environmental response (Chesson andHuntly, 1997). In most cases, it is defined so that larger

values of Ejx mean more favorable environments, i.e., sothat Gj is an increasing function of Ejx .
The competition parameter Cjx measures the totaleffect of competition on *jx in some well-defined way, andnormally Gj decreases in Cjx . Note that * jx(t) is theexpected contribution of an individual to the populationin the system at time t+1, given Ejx and Cjx . Thus theexpected output from the location x at time t+1, givenEjx , Cjx , and Njx(t), is *jx(t) Njx(t). In general, *jx(t)Njx(t) differs from Njx(t+1), which takes account ofdispersal also. However, mortality during dispersal isassumed to be factored into *jx(t).
The location x, depending on the situation, could be aparticular patch or cell in the landscape supporting alocal population, a particular point in continuous space,or a point on a lattice able to support just a singleindividual organism. The development here is generalalthough the worked examples are all cell-based or itsequivalents. Two spatial scales are considered explicitly:the scale of a single location and the scale of the wholepopulation, which is a scale at which the system is effec-tively closed (Chesson, 1996) and will be referred to forconvenience as the regional scale following (Slatkin,1974). In models, this regional scale may actually includean infinite amount of space, such as an infinite number ofpatches or the entire real plane, R2. Such infinite systemsmay be considered large system limits that simplifymodeling. The following example motivates the generalmodel.
Model of an Annual Plant Community
Consider an annual plant with a seed bank. Anindividual seed is assumed to have a particular germinationprobability, Ejx , as a function of the environmental condi-tions that it experiences. If it germinates, then it growsand has seed yield
Yj �Cjx ,
where Yj is seed yield in the absence of competition, i.e.,with competition parameter equal to one. The competi-tion parameter, Cjx , is then the amount by which yield isreduced by the presence of neighbors.
If the seed does not germinate, it has some survivalprobability sj . Putting this information together gives
*jx=Gj (Ejx , Cjx)=sj (1&E jx)+EjxYj �Cjx . (2)
Coexistence and Spatial Variation
Note that this formula describes the mean contributionto the total seed population of species j at time t+1 froman individual seed experiencing Ejx and Cjx , at time t.
What an individual actually does naturally shows chancevariation from this mean, leading to demographicstochasticity; but (2) defines the mean for an individualexperiencing these conditions. We can imagine that thegermination probability Ejx(t) is defined by physical con-ditions at location x and time t. Indeed, those physicalconditions prescribe a particular value for the vector ofgermination probabilities (E1x , E2x , ..., Enx) for the nspecies guild. Hence there are likely to be correlationsbetween the germination probabilities of different speciesdue to a common physical environment.
Equation (2) does not define the full dynamics ofthe system. At the very least, Cjx needs to be defined.Plausibly, it depends on the number of other seedsgerminating in a defined neighborhood of the given seed.For example,
Cjx=1+ :n
l=1
: lElx' lx , (3)
where 'lx is a measure of the number of seeds of speciesl present in a neighborhood of location x and :l is thecompetitive effect of an individual of species l. A verysimple assumption, uniform dispersal, in which seedsproduced at any location are dispersed equally to alllocations, would give 'lx=N� l(t), the average densityin space of the species in the system. In that case, giventhe probability distribution of (E1x , E2x , ..., Enx), thedynamics of seed densities in the system are fully defined.However, more complex dispersal scenarios are realistic,and in general 'lx will not be available from a simpleformula.
In the above example, the competition parameter (Eq. 3)does not depend on j, the species; and for this reason, wecan say that there is only one competitive factor in thissystem. We can write Cjx=1+Fx , where the competitivefactor Fx is the weighted sum of the seedling densities inthe neighborhood of x, the weights being the competitiveeffects of the different species. Summarizing competitionin this way in terms of competitive factors allows thecompetitive relationships between species to be betterunderstood. In a system that is homogeneous in spaceand time, for example, this representation leads to theimmediate conclusion that only one species would beable to persist in the long run (Levin, 1970; Armstrongand McGehee, 1980; Chesson and Huntly, 1997). Ingeneral, we shall think of the competition parameter Cjx
213
as some function ,$j (F) of a vector of p competitivefactors F=(F1x , ..., Fpx)$. There is no loss of generality inthis assumption because the definition Fjx=Cjx is alwayspossible, although uninformative.

Another property of the formula (3) for Cjx in theabove example is that it is explicitly a function of theenvironmentally-dependent parameters of the species:the competitive factor, seedling density, is dependent onthe local germination rates. Thus, the environmentally-dependent and competition parameters covary; i.e., thereis covariance between environment and competition. Evenwithout explicit representation of competition in terms ofenvironment, such covariance arises when there is limiteddispersal in space and there are correlations over time inthe environment, for then the local density Njx(t) iscorrelated with the environmentally-dependentparameter,Ejx(t). If the spatial locations, x, are cells within whichdensity-dependent interactions are confined, competitionmay be represented explicitly as a function fj of localenvironmentally-dependent parameters and local density;i.e.,
Cjx(t)=fj (E1x(t), E2x(t), ..., Enx(t), N1x(t),
N2x(t), ..., Nnx(t)). (4)
However, with more general assumptions about space,such a tidy representation of competition would notapply.
Population Dynamics at the Regional Scale
On the regional scale, where the system as a wholeis assumed closed, the total number of individuals ofspecies j at time t+1 is approximately equal to the sumof *jx over all individuals in the population. The actualtotal population at time t+1 will differ randomly fromthis, but for large populations this random deviation canbe ignored. Demographic stochasticity occurring locallyin space, and interacting with nonlinear dynamics locallyin space, potentially has systematic effects on the sum ofthe *jx (Chesson, 1981; Durrett and Levin, 1994; Bolkerand Pacala, 1997; Chesson, 1998; Bolker and Pacala,1999) and in general should not be ignored because insome cases it has major effects on species coexistence(Durrett and Levin, 1994; Bolker and Pacala, 1999;Neuhauser and Pacala, 1999).
From this approximation to the total population attime t+1, it follows that the dynamics of the density ofspecies j for the whole system are given by the equation
N� j (t+1)=*� j N� j (t), (5)
214
where *� j is the average of *jx over all individuals in thepopulation of species j, and N� j is the average density ofspecies j in the system, i.e., the total population of species
j in the system divided by the area for a system with finitearea or an appropriate limit of such a ratio for a systemwith infinite area.
Equation (5) importantly contains two different sortsof averages: an average of *jx over individuals and anaverage of population density over space. The averageover individuals can also be expressed as an average overspace if we define the local relative density to be
vjx=N jx�N� j , (6)
where Njx is the population density of species j at loca-tion x. Then the average of *jx over all individuals can bewritten as
*� j=*jvj=*� j+Cov(*j , vj ), (7)
which expresses the average over individuals first as aspatial average weighted by density of individuals at alocality and then as a spatial average plus the covariancein space of *jx and local relative density, vjx . Because thesystem is large enough that fluctuations due to demo-graphic stochasticity at the regional scale can be ignored,these averages can be written as theoretical mean orexpected values; and the covariance can be written as thetheoretical spatial covariance. In particular, we can write
*� j=E[Gj (Ej , Cj )], (8)
where the expected value is over space, and the symbolsEj and Cj refer to random variables that take the par-ticular values Ejx(t) and Cjx(t) when the location x andtime t are specified; i.e., Ej and Cj are functions of xand t whose variation with x and t can be described byprobability distributions. Ejx(t) and Cjx(t) are the realizedvalues of Ej and Cj . Similary, Nj will be a random variablerepresenting the local densities, which takes the valueNjx(t) for given x and t, and E[Nj (t)]=N� j (t), to anadequate approximation in large systems��a probabilitytheory perspective on this is given in Appendix I.
In general, the vector of environmentally-dependentparameters (E1 , E2 , ..., En), for the n species has a jointn-dimensional probability distribution describing thejoint variation in space of these parameters. This distri-bution will be assumed not to vary in time, which meansthere is no overall temporal variation in the system, but
Peter Chesson
there may well be spatio-temporal variation. Thus,although the distribution of the values of (E1 , E2 , ..., En)over all space is the same at every time, it is quite possiblethat the value of (E1 , E2 , ..., En) at any given location

varies with time. Pure spatio-temporal variation (Chesson,1985) is the case where (E1 , E2 , ..., En) varies independentlyover time at each spatial location, x, and conversely variesindependently over space for each time, t. Pure spatialvariation is the case where (E1 , E2 , ..., En) does not varywith time and hence only varies in space. In general, itassumed here that some mixture of these two sorts ofvariation applies. The role of pure temporal variation hasbeen investigated at length in Chesson (1994) and willnot be considered in this article. The spatial patterns of Ej
may be correlated between species. However, realistically,it must also be expected that species do not have perfectlycorrelated spatial patterns of variation; i.e., there arelikely to be species-specific responses to the environment.
The variation in space of the competition parameter,Cj , can be expected to depend on or be correlated withthe environmentally-dependent parameters of the species,as illustrated in Eq. (3) and discussed at length elsewherein the context of temporal variation (Chesson andHuntly, 1988). Thus, in general it can be expected that Ej
and Cj will covary over space; i.e., there will be covariancebetween environment and competition. Naturally, Cj alsovaries with local abundances.
How organisms migrate, disperse, or otherwise movein space is not specified in the formulation above. Thefinite rate of increase is assumed to take into account anymortality that takes place during dispersal, but dispersalshould have major effects on relative local densities, vjx .Note that because of dispersal, Njx(t+1){*jx(t) Njx(t).The *jx(t) Njx(t) individuals at time t+1 arising from theNjx(t) individuals at location x and time t are dispersedby some rule, which, for the most general developmentshere, need not be specified. The outcome of dispersalregisters in the variables vjx , and it is the properties of vjx ,not the underlying cause of these properties, that figuresin these general developments. Very simple migrationassumptions, however, lead to spatially-implicit models,which we consider next as one particularly tractable classthat illustrates in simple form the general principles to bederived here.
Spatially-Implicit Models
The general model presented above can be very com-plicated to analyze from the fact that the probabilitydistribution for relative local density, vjx , changes withtime in a manner that is difficult to determine in general.In certain models, sometimes called spatially implicit or
Coexistence and Spatial Variation
pseudo-spatial, the probability distribution for relativelocal density can be written as a function of regionalaverage densities, (N� 1(t), N� 2(t), ..., N� n(t)). Such spatially-implicit models are most clearly applicable to the situation
where local populations are ephemeral, dispersing widelyin space every unit of time. In such cases, dispersingorganisms can be regarded as forming a common poolfrom which they are redistributed. Populations do notbuild up over time in particular localities, although theyneed not be randomly distributed in space. Randomdispersal would lead to a Poisson distribution in spacewith mean N� j (t), which at high local densities is approxi-mated by uniform dispersal in which the emigrants fromany locality are equally distributed over all localities.Nonrandom dispersal may occur with widespread dispersalbecause organisms may be clumped in space by aggregationin relation to local environmental conditions or inrelation to chance prior immigration at a locality. Thenegative binomial distribution with mean N� j (t) andconstant clumping parameter k is a model representingaggregation of widely dispersive organisms to particularlocal environmental conditions (Chesson, 1998). In thisscenario, immigration to a locality from the pool ofdispersing individuals may be explicitly represented as afunction of the environmentally-dependent parameter Ej
(Chesson, 1985). These various instances of widespreaddispersal are justifications for spatially-implicit models ofpopulation dynamics; they may be good approximationsfor some systems such as insects feeding on ephemeralresource patches (Atkinson and Shorrocks, 1981; Ives,1988), marine systems with widely dispersing larvae(Chesson, 1985; Comins and Noble, 1985), and evenannual plant communities when dispersal is large com-pared with the mean spacing between individual organisms(Pacala and Silander, 1985).
In these circumstances it is often possible to write *� j (t)in a similar form to Eq. (8) for *� j (t); i.e., there is a func-tion Hj such that
*� j=E[Hj (Ej , Cj )]. (9)
Thus, the function Hj combines Gj and vj , but is notalways simply the product, but more generally, theconditional expectation
Hj (Ej , Cj )=E[*jvj | E1 , ..., En], (10)
in which Cjx may have a slightly different definition thanwould naturally apply. The example below illustrates thisidea.
Model of Insects Laying Eggs in Ephemeral
215
Patches of Food
Some insects, especially Dipterans, lay their eggs inephemeral patches of food, such as fruit, fungi, or the

dead bodies of animals, in which their larvae develop(Atkinson and Shorrocks, 1981; Ives, 1988). As thesepatches last for just one generation, to lay their eggs, theflies emerging from these food patches must disperse tonew food patches. Common models for this situationtake forms equivalent, for the purposes of studyingspecies coexistence, to
*jx=erj (1&Cjx), (11)
where
Cjx= :n
l=1
:jlN lx , (12)
Nlx is the number of eggs deposited in food patch x ofspecies l, and the :jl are competition coefficients. A simplemodel of dispersal is Njx(t)=Ejx(t) N� jx(t), i.e., the totalpool of eggs, is divided up over patches according tosome environmental characteristic of the food patchessuch as attractiveness or accessibility of a food patch toadults of the species. In this particular instance, vjx=Ejx ,and we see that
Hj (Ejx , Cjx)=*jx vjx=E jxerj (1&Cjx ). (13)
An alternative interpretation of this formula is thatdispersal is uniform in space, meaning that vjx=1, andEjx is a patch and species-specific survival rate from eggto larva due to the physical conditions of the particularpatch. With this latter interpretation, expression (13)equals Gj as well as Hj .
Following the first scenario where the number ofindividuals arriving at a patch depends on the environ-ment of the patch, it is common in the literature to havea negative binomial for the distribution of eggs overpatches. To cover that case, Elx N� l (t) can be consideredto be the conditional mean number of eggs of species l inthe patch with the conditional distribution of Nlx(t), l=1, ..., n, being independent Poisson given Elx , l=1, ..., n.If the marginal (i.e., ordinary or unconditional) distribu-tions of the Elx are gamma, it follows that the marginaldistributions of the Nlx(t) are negative binomial��this isin fact the approach used by (Ives, 1988). In this case,formula (13) for Hj still applies, with the followingchanges. Hj (Ej , Cj ) is now interpreted as the conditionalexpectation, E[*jvj | El , l=1, ..., n]; rj and the :jl are
216
replaced by
r$j=rj (1&:jj ) and :$jl=1&e&rj :jl
rj (1&:jj ). (14)
The competition parameter is replaced by the averagevalue of (12) for the given environmental conditions, viz.
Cjx= :n
l=1
:jlElx N� l . (15)
It is worthwhile noting also that the Poisson componenthas a small effect if the competition coefficients are small.As 1�:jj is the local carrying capacity in terms of eggnumber, moderately large average local egg numbersremove any appreciable effect of the Poisson componentof negative binomial variation, and the gamma distribu-tion based just on variation in Ejx can be used instead. Asimilar remark applies to the annual plant model forlarge dispersal distances. Although a Poisson distribu-tion is certainly more realistic than no variation in spacein seed densities, which arises from the assumption ofuniform dispersal, moderately large local neighborhoodsmean that the Poisson distribution would have negligibleeffects and important effects of space would continue toarise from spatial variation in seed germination (attributedhere to an environmental effect), not seed abundance.Naturally, other dispersal assumptions, such as environ-mentally-dependent dispersal, or short distance dispersalcould lead to important effects of spatial variation in seedabundance, as demonstrated by Bolker and Pacala (1999).
MODEL ANALYSIS
Having established the equation N� j (t+1)=*� jN� j (t) asdefining the regional dynamics of a large population,how do we analyze it? In spatially-implicit models asdiscussed above, *� j (t) can be expressed as a function of(N� 1(t), N� 2(t), ..., N� n(t)) alone, and therefore the dynamicsof average population density are simply defined byautonomous difference equations. Standard methodsapply. In other cases, a full analysis of the system ispotentially extremely complex. However, for a broadsubset of cases, necessary conditions for coexistence areavailable with important general information aboutcoexistence in a spatially variable environment. In manysituations, it seems likely that these conditions are alsosufficient, but at present there is no general approachdemonstrating sufficiency.
When it is possible for species to be perturbed to
Peter Chesson
arbitrarily low densities, a necessary condition for stablecoexistence is that each species increases from suchlow densities in the presence of its competitors (mutualinvasibility). Additional conditions are necessary to specify

sufficient conditions for stable coexistence (Chesson, 1982;Hutson and Law, 1985; Chesson and Ellner, 1989; Ellner,1989; Law and Morton, 1996), but an increase from lowdensity is an essential feature of stable species coexistenceand provides a means of quantifying coexistence. In aninvasibility analysis, species perturbed to low density aretermed invaders and will be denoted here by the specieslabel i. The rest of the community, which has not beenperturbed to low density, is given species labels r and s, andis termed the residents. If *� i is greater than 1, species i isassumed to be able to persist in the presence of its com-petitors (the residents) and the actual value of *� i can beused to quantify coexistence and therefore to measurequantitatively the contributions of different coexistencemechanisms. Indeed, this ability to quantify coexistenceis an important attribute of the invasibility criterion.
Calculating the invader growth rate, *� i , is far fromstraightforward in general spatial models. First, *� i mightfluctuate over time, in which case, invasion is determinedby the mean of over time of ln *� i (t) (Turelli, 1981; Chessonand Ellner, 1989). However, most spatial models of com-petitive interactions that do not involve pure temporalenvironmental variation (Chesson, 1985) do not lead toimportant temporal fluctuations in *� i for large regionalpopulations; that situation will be assumed here becausethe purpose is to focus on the effects of variation in space.Indeed, consideration will be restricted here to thecommon case where the residents converge on constantregional densities, i.e., where the vector of residentdensities [N� r(t), r{i] converges with time on a constantvalue, with the invader constrained to low density. Thisconvergence of resident regional densities is associatedwith convergence over time of the probability distribu-tion describing the joint variation in space of [Erx(t),Crx(t) and Nrx(t), r{i]. When these conditions havebeen satisfied, the residents are said to be at their stationarydistribution.
Under the above scenario, the invader rate of increaseis a function of the stationary statistical properties ofthe resident population, the invader's environmentally-dependent parameters, and the invader's distribution inspace. To understand the key features of the invader'sdistribution in space, note that when local populationdensities are modeled as continuous variables, lowregional densities will normally also mean that localdensities are mostly small. It follows that effects of speciesi 's density on itself and on the residents will becomenegligible as the regional density, N� i (t), of species i is
Coexistence and Spatial Variation
made arbitrarily small. The dynamics of invader speciesi will therefore be asymptotically linear its own localdensities, as N� i (t) � 0, which means that the dynamics ofrelative densities, [vix(t), all locations, x], will not
depend on the invader regional density, which can there-fore be set equal to 0. The probability distributiondescribing spatial variation in (vix(t), *ix(t)) shouldconverge with time to a unique limiting distribution with*� i being the spatial average of *ix(t) vix(t) for this limitingdistribution.
The above described convergence of the invader'sspatial distribution will be assumed here. In addition tocommon applicability to models where local populationsizes are continuous variables, such convergence is alsocommonly applicable to spatially-implicit models withinteger local population sizes. Spatially-explicit modelswith integer local population sizes and local dispersalpose thorny issues with respect to the existence of thevarious limits implying a unique well-defined value of *� i ,which I shall not attempt to solve here. I simply ask thereader to be satisfied that the invasion analysis applies toa broad enough class of models to make the developmentthat follows worthwhile.
In studies of invasions of alien species (e.g., Shigesadaand Kawasaki, 1997) it is common to study invasionfrom a single point in space. However, the intention hereis not to mimic the process of invasion when a speciesis just introduced to a region, but to study the processof recovery if it is reduced to low density on averagethroughout the region, which is appropriate for the studyof species coexistence, especially in the presence of acomponent of pure spatial environmental variation,which means that invasions in different spatial locationsmay follow very different courses.
In conducting the invasibility analysis, I shall add thesuperscript &i to the competition parameter to indicatethat the residents are assumed to have reached theirstationary distribution in the absence of species i, theinvader. In these terms, we seek to determine the sign andmagnitude of
*� i=*� i+Cov(*i , vi )
=E[Gi (Ei , C &ii )]+Cov(Gi (Ei , C &i
i ), vi ). (16)
SPATIAL COEXISTENCEMECHANISMS
Three general classes of coexistence mechanisms arisefrom variation in space. Two of these, the storage effect
217
and relative nonlinearity of competition, arise fromthe behavior of the simple average *� i and are directanalogues of mechanisms applying for temporal varia-tion, which arise from the temporal average, r� i=ln *i ,

of ln *i (t). The final class of mechanisms, which asyet has no known temporal counterpart, arises fromCov(*i ,vi ).
The Spatial Storage Effect
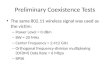
The storage effect arises from an interaction betweenEj and Cj in their joint determination of *j (Chesson,1988, 1994; Chesson and Huntly, 1997). An interactionmeans in particular that the value of Ej alters the effectthat Cj has on *j . This is illustrated in Fig. 1. In panel (a)of the figure, increasing the value of Ej steepens the slopeof the relationship between *j and Cj, , an effect which ismeasured by the cross partial derivative
#=�2Gj
�Ej �Cj. (17)
In the case of Fig. 1a, this cross partial derivative isnegative, indicating that the negative slope of the rela-tionship between *j and Cj is made more negative byincreases in Ej . This situation is referred to as subadditive,because the change in *j that results from a joint changein Ej and Cj is less than the sum of the changes thateach factor causes when varied separately. In spatially-implicit models, subadditivity and the quantity # should bedefined in terms of H rather than G; indeed, for spatially-implicit models H should be substituted for G throughoutthe discussion below.
Subadditivity may be regarded as having a bufferingeffect on population growth because simultaneously poorconditions, viz. a low value of Ej and a high value of Cj ,are not as bad as predicted by the sum of their separateeffects. Contrasting situations are additive growth rates,corresponding to a zero value of # (Fig. 1b), and super-additive growth rates with positive # (Fig. 1c). Withadditive growth rates, Ej and Cj contribute separately toproduce *j and so the joint effect of Ej and Cj is simplythe sum of their separate effects. With superadditivegrowth rates, there is again an interaction between Ej andCj but in this case a low Ej and a high Cj is worse thanpredicted by the sum of their separate effects.
The annual plant model given by Eq. (2) above issubadditive as are most spatial models that can be put inthis framework. There is a very simple reason. The finiterate of increase *j cannot be less than 0, and it wouldnormally be expected that *j would approach 0 as com-petition becomes severe, regardless of the environmental
218
conditions. Thus, plots of Gj (Ej , Cj ) against Cj fordifferent Ej should all converge on zero. Thus, at least forlarge Cj , these plots should look like Fig. 1a, subad-ditivity. This situation does not apply when considering
FIG. 1. The finite rate of increase, *, plotted as a function of thecompetition parameter C for increasing values of the environmentally-dependent parameter, E. Thicker curves are higher values of E.(a) Subadditivity; (b) additivity; (c) superadditivity.
purely temporal variation for then one is concerned withaveraging rj (=ln *j) which is not bounded below by anydefinite value. In the temporal case, models with additivegrowth rates may be formulated realistically, but super-additivity is more difficult to obtain (Chesson andHuntly, 1988; Chesson, 1994).
The biological explanation for the difference betweenthese two situations is that in the spatial case, the bufferingof population growth that is associated with subadditive
Peter Chesson
growth rates automatically occurs from the subdivision ofthe population in space over the varying conditions of Ej
and Cj because poor performance in some spatial locationsis ameliorated by better performance elsewhere. Such

effects do not occur so readily with temporal variation fromthe simple fact that population growth is multiplicativeover time, and so poor performance at one time lowersthe starting point from which population growth occursthe next time. Specific life-history traits are needed tocounteract such negative effects arising from the multi-plicative nature of population growth (Chesson andHuntly, 1988).
Subadditive growth rates not only buffer populationgrowth, they may also lead to species coexistence whencombined with two other realistic features of nature. Thefirst of these is species-specific responses to the environ-ment: different species have different patterns of variationin environmental responses (Ej ) in space. The secondfeature is covariance between environment and competition:the competition parameter Cj increases as a function of theenvironmentally-dependent parameter, Ej . Covariancebetween environment and competition constrains thepattern of joint variation in Ej and Cj on which *j
depends and therefore affects the outcome of the inter-action between Ej and Cj .
To see how this promotes coexistence, consider thefollowing symmetric example:
Symmetric example. Assume
1. There is a common Gj=G for the differentspecies;
2. There is a common Cj=C, and the conditionaldistribution of C&i (t), given (E1(t), E2(t), ..., En(t)),depends symmetrically on the resident environmentally-dependent parameters, Er(t), r{i, and does not varywith the invader environmentally-dependent parameter;
3. Environmental variation is pure spatio-temporal,and the distribution of (E1 , E2 , ..., En) is symmetrical.
In the special case of the annual plant model, assumption1 means that sj and Yj have the same values for allspecies, assumption 2 means that :j is the same for allspecies, and dispersal does not differ between species. Asymmetrical distribution as specified in 3 means that(E?(1) , E?(2) , ..., E?(n)) has the same distribution as(E1 , E2 , ..., En) for any permutation ?(1), ?(2), ..., ?(n) of1, 2, ..., n. In particular, all species have the same distribu-tion for their environmentally-dependent parameters,and all pairs of species have the same correlation betweentheir environmentally-dependent parameters.
Now we add to these assumptions the three ingredientsof the storage effect as they apply in this specific example:
Coexistence and Spatial Variation
4. species-specific responses to the environment,which means here that Ej&El has positive variance forany pair of species j and l ;
5. Covariance between environment and competi-tion: the conditional distribution of C&i (t), given (E1(t),E2(t), ..., En(t)) is an increasing function of the residentenvironmentally-dependent parameters, Er(t), r{i, i.e.,P(C&i (t)>c | E1(t), E2(t), ..., En(t)) increases in anyEr(t) for all constants c;
6. Subadditivity, which is discussed at length above.
Assumption 5, deserves amplification. The idea is simplythat competition should increase as a function of theenvironment. However, competition is also a function ofspecies densities, which complicates the issue. With anexplicit representation of competition in the form
Cx(t)=f (E1x(t), E2x(t), ..., Enx(t), N1x(t),
N2x(t), ..., Nnx(t)),
where f is some function increasing in each of the Ejx(t),then the assumption that the environmental variation ispure spatio-temporal is sufficient for assumption 5 forthen the Nj (t) are statistically independent of the Ej (t)and so do not interfere with the relationship betweenC(t) and Er(t). Those spatially-implicit models in whichthe Nj (t) do not vary in space also have this propertyregardless of whether environmental variation is purespatio-temporal. In other situations (see examples below),it is often the case that the conditional distribution of localresident densities increases with their respective environ-mentally-dependent parameters, and as f would naturallyincrease as a function of local densities, condition 5 wouldagain be satisfied.
With these assumptions, two equivalent but differentderivations for the temporal case given in (Chesson,1988, 1990) can be extended to show that
E[G(Ei , C&i )]>E[G(Er , C&i )], (18)
i.e., the average value of * over space for invaders isgreater than that for residents (*� i>*� r). Thus, in the caseof zero covariance between * and relative density v, or ifG is replaced by H, this is identical to the statement
*� i>1, (19)
219
which is the same for all species as invaders and thereforemeans that all species coexist according to the invasibilitycriterion. The derivation for the temporal case in (Chesson,1990) shows in particular that the difference between *�

and 1 increases with the magnitude of subadditivity (asmeasured by #), increases with the variance of Ej&El ,and increases with the slope of C as a function of Ej .
Thus, it increases with the magnitude of each of threeingredients of the storage effect. In this symmetric casewith Cov(*, v)=0 or in symmetricspatially-implicitmodels,the storage effect is the sole and complete mechanism ofcoexistence. The symmetric case is not realistic in nature,however. It remains of interest because in general *� i
can be expected to vary continuously as a function ofdeviations from symmetry. Therefore, *� i will remainabove 1 for some range of deviation from symmetry. Ofgreatest importance are situations where different specieshave different spatial average fitnesses, which might bereflected, for example, by different average values of theEj . Without variation in the environment, these caseslead to domination by a single species, but with sufficientvariation and the ingredients above for the storage effect,coexistence is possible in spite of the average fitnessdisadvantages that some species may have. The quan-titative approximations below show how this works.
In spatially explicit models with limited dispersal,inequality (18) still holds under the symmetric assump-tions above, and so the storage effect can be consideredto contribute to coexistence even though it may beopposed or reinforced by the behavior of Cov(*, v). Thisissue is clarified by the quantitative results below, whichallow simultaneous consideration of multiple mechanisms.
Spatial Relative Nonlinearity ofCompetition
Organisms living in the same environment and respond-ing to the same competitive factors may differ by havingdifferent nonlinear responses to these competitive factors.For example, expressing the competition parameter interms of a vector of common competitive factors F,
Cj=fj (F), (20)
*j takes the form
*j=Gj (Ej , fj (F)). (21)
220
Species coexistence may be affected when the *j are dif-ferent nonlinear functions of F for different species and Fvaries in space. Effects on coexistence are most easily seenin the case of just a single competitive factor, F. Assuming
that *j is monotonic in F for each j, then for any twospecies u and v, the common dependence on F means thatthe *s can be expressed in terms of each other and thevector of environmentally-dependent parameters, E=(E1 , E2 , ..., En), by means of some function which may bedesignated huv :
*u=huv(E, *v). (22)
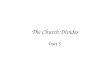
The critical issue is the shape of *u as a function of *v . Forexample, in Fig. 2, with *u a convex function of F and *v
a concave function of F, *u is a convex function of *v
(�2huv(E, *v)��*2v>0) and therefore curves upward as
*v increases. When *u is a convex function of *v , *v isnecessarily a concave function of *u assuming that theyare both decreasing or both increasing functions of F.Relative nonlinearity is any deviation from linear relation-ships between the *s through their common dependenceon F, but the strictly convex and concave relationshipsdepicted in Fig. 2 may be called uniform nonlinearities.
Jensen's inequality applies to show that when aninvader * is a convex function of a resident *,
*� i>E[hir(E, *� r )], (23)
which means that spatial variation in F boosts *� i abovethe value predicted by the relationship (22) between *i
and *r . With the roles of the species reversed (i.e., the
Peter Chesson
FIG. 2. The finite rate of increase, *, plotted against a commoncompetitive factor, F, for two different species in the same community.(a) Convex relative growth rate, (b) concave relative growth rate.

previous resident as the invader), the invader * is aconcave function of the resident *,
*� i<E[hir(E, *� r)], (24)
and *� i is diminished by spatial variation in F. Thus,variation in a common competitive factor in the presenceof a uniform relative nonlinearity pushes one species' *� i
down and pushes the other species' *� i up. This asym-metrical effect naturally follows from the asymmetriesbetween species inherent in relative nonlinearities.
A single competitive factor in a spatially- and temporally-uniform environment, i.e., with no variation in E or F inspace, would predict dominance by one species becausean F* rule would apply in analogy with the R* and P*rules respectively for resource and apparent competition(Holt, Grover, et al., 1994). To see this, note that theequation 1=Gj (Ej , fj (F*)) defines species j 's F* value,which is the value of F at which species j would notchange in population size. Assuming that * is monotoni-cally decreasing in F, that species differ in their F* values,and that the multispecies system does come to a pointequilibrium, homogeneously in space and time, then onlythe species with highest F* value would be present atequilibrium (Holt, Grover, et al., 1994). Applying thisresult to a system consisting of just two species we seethat the average invader growth rate, *� i=hir(E, 1), canonly be greater than 1 for one of them, the dominant.
In the presence of spatial variation in F, the asym-metrical effects of relative nonlinearity on these twospecies expressed by inequalities (23) and (24) promotecoexistence by increasing the *� i of a relatively convexsubordinate species as long as the *� i of the dominant isnot too greatly decreased. The approximate quantitativeresults below show how these effects may be achieved. Ingeneral, for relative nonlinearity to act as a coexistencemechanism by itself, more variance in F must be associatedwith the relatively concave dominant as a resident thanwith the subordinate as a resident so that the subordinate*� i may rise above 1 without the dominant *� i falling below1. Relative nonlinearity works here by diminishing fitnessdifferences between species. It does this when theotherwise more fit species is the more concave.
As with the storage effect, changes in *� i due to spatialvariation only demonstrate coexistence promoting effectsif they are not opposed by changes in Cov(*, v) or if G isreplaced by H in the above discussion, in which case the
Coexistence and Spatial Variation
results apply directly to *� i . In any case, the limited abilityfor relative nonlinearity to promote coexistence whenacting alone means that it is best viewed as modifyingother mechanisms such as the storage effect or covariance
between the finite rate of increase and the relative density.It can do this by decreasing the degree of dominance ofa superior competitor with a relatively concave growthrate making it easier for other mechanisms to raise allvalues of *� i above 1. On the other hand if the superiorspecies is relatively convex, competitive exclusion will bepromoted by relative nonlinearity.
Relative nonlinearity occurs under different circum-stances in space compared with time. For example, theannual plant model described above is not relatively non-linear as a spatial model because the *s of different speciesare linear functions of the same nonlinear function ofthe competitive factor. However, relative nonlinearityapplies in time when species differ in sj or Yj (Chesson,1994). In contrast, the insect model given by Eq. (12)always shows relative nonlinearity if the competitionparameter is common to all species (Cj#C ) wheneverthe rj differ between species. However, the correspondingtemporal model never shows relative nonlinearity(Chesson, 1994, Sect. 5.1).
Covariance between Relative Densityand Rate of Increase
The quantity Cov(*j ,vj ) would seem to be affected bymany factors including the nature of dispersal and thenature of environmental variation, but as yet there is nogeneral understanding of its properties. However, in thepresence of limited dispersal and pure spatial variation itmay reasonably be expected to be positive because localpopulations should then be larger in locations with largerfinite rates of increase. This covariance may be larger forinvaders than for residents when there are species-specificresponses to the environment because residents aremore limited by competition and therefore have smallervariance in both *j and vj which should mean smallercovariance between them. This reasoning suggests thatcoexistence should be promoted by limited dispersal andpure spatial variation due to Cov(*j , vj ). To see that thisproposition is indeed correct in at least some circum-stances, consider the symmetric example discussed aboveunder the subheading The Spatial Storage Effect, makingassumptions 1�3 with the modification that variation isrestricted to pure spatial variation.
To specify limited dispersal, assume that each timeperiod, t to t+1, some particular fraction, q=1&p, is
221
dispersed from each locality to join a common pool fromwhich they are uniformly dispersed to all localities. Thisis a model of widespread dispersal with local retentionas may be expected in communities of coral reef fishes.

The dynamics at each locality are then given by theequation
Njx(t+1)=p*jx(t) Njx(t)+qN� j (t+1). (25)
It is shown in Appendix II that *� i>1 if and only if
Ef (G(Ei , C &ii ))>Ef (G(Er , C &i
r )), (26)
where f is the function defined by the equation f (G)=qG�(1&pG ). Thus, the conditions for coexistence thatwere encountered in the discussion of the storage effectabove now apply to f (G) rather than G. It follows that iff (G) is subadditive and there is positive covariancebetween environment and competition, then condition(26) for coexistence is satisfied. With p between zero andone, f is an increasing convex function. It follows thatf (G) is subadditive when G is additive or subadditive andit is also possible for f (G) to be subadditive in some caseswhere G is superadditive (Appendix II).
At least in the two species case, if C increases directlyas a function of the Ej or is instead constant as a functionof the Ej , in the functional form Cx(t)=f (E1x(t), E2x(t), ...,Enx(t), N1x(t), N2x(t), ..., Nnx(t)), it is nevertheless true thatC&i has positive covariance with the Er (Appendix II). Itis also possible for C&i to have positive covariance withthe Er when C decreases as a function of the Ej , withrelative densities held fixed. Thus, coexistence occursprovided only that the functions G are not too superad-ditive and C does not decrease too strongly as a functionof the Ej . These results represent substantial broadeningof the range of the opportunities for coexistence com-pared with cases with pure spatio-temporal variation andno variation in relative density. Variation in relativedensity has two effects. One is to increase covariancebetween environment and competition and thus con-tribute to the storage effect by allowing positivecovariance between environment and competition evenwhen C decreases as a function of the Ej . The second isa positive effect resulting from the covariance betweenthe local finite rate of increase and relative density. Thiscovariance is simply the difference *� &*� j , and the com-parison of these differences for residents and invaders inthis symmetric situation can be regarded as its contribu-tion to species coexistence. It is tempting to regardEf (G)&EG as Cov(*, v) but this is only true when *� isequal to 1 and therefore only correct for the residentspecies. However, it is apparent from Appendix II that
222
Ef (G)&EG may be regarded as a 0th order approxima-tion to Cov(*, v) in other cases.
The presence of Cov(*, v) leads to effects directlyanalogous to subadditivity in this particular example.
Could it be that an effect comparable to relative non-linearity of competition might also occur in some circum-stances? A little calculus shows that relative nonlinearitymay potentially occur in the case of pure spatial variationconsidered here when the species differ in the amount oflocal retention during dispersal, for this means that thefunctions f that modify the effect of G are convex todifferent degrees for different species.
QUANTITATIVE RESULTS
The three mechanisms discussed above, the storageeffect, relative nonlinearity, and covariance between thegrowth rate and relative density, can be expressed asadditive components of *� i using a quadratic approxima-tion. Within the accuracy of the quadratic approximation,these three mechanisms dependent on spatial variation,together with mechanisms of coexistence that do not relyon spatial variation (``variation-independent'' coexistencemechanisms), seem to exhaust the possibilities forcoexistence within the general model. This quadraticapproximation technique is developed in detail in(Chesson, 1994) for temporal variation, which is reliedon heavily. The technique begins by nonlinear transfor-mation of the environmentally-dependent and competi-tion parameters to a standard form, which expressesthem in units of *j , i.e., in units that mean the same thingin any particular case of the general model.
Parameter Standardization
In order to define the standard parameters, a pair ofvalues of Ej* and Cj* of Ej and Cj are chosen satisfyingthe relationship
Gj (Ej*, Cj*)=1, (27)
which means no population growth��an equilibrial situa-tion. Species persisting in the system necessarily have their* values varying around 1. Hence, the existence of param-eter values giving the actual value 1 is not a demandingrequirement. The particular values Ej* and Cj* will bereferred to as equilibrial values. Unlike Ej and Cj , thesevalues do not vary in space. In general, there will be a
Peter Chesson
continuum of choices for the pair of equilibrial values,which leads to some arbitrariness in the analysis, but therules below constrain E j* to be near the mean of E j andmake that arbitrariness of small order.

The standard parameters are now defined as
Ej=Gj (Ej , Cj*)&1 (28)
and
Cj=1&Gj (Ej*, Cj ). (29)
Provided Gj is monotonic in each of its arguments, thesenew parameters contain the same information as theoriginal parameters but are expressed in units of the finiterate of increase *j . Like the Ej and Cj , the Ej and Cj varyin space and possibly time also, but this dependence issuppressed in the notation for simplicity. Again, they arebest thought of as random variables that take specificvalues when space and time are specified.
Quadratic Approximation
In simple models, the formula for *j in terms of thestandard parameters is very often quadratic in form.Indeed, it is quadratic in all of the examples given here.Naturally, it is also approximately quadratic when thevariation in Ej and Cj is small. Under certain assumptionsdiscussed in Appendix III, small variation in Cj followsfrom small variation in Ej . The assumption of smallenvironmental fluctuations is expressed formally as
Ej=O(_) (30)
which means here that Ej varies within a finite intervalcontaining 0 (a constraint on the choice of E j*), of order_ (a constraint on the magnitude of variation), where _is a small parameter. From the assumptions in AppendixIII, this means
Cj=O(_). (31)
A further constraint on the choice of E j* is the requirement
E[Ej ]=O(_2). (32)
Under the appendix assumptions, this implies also that
E[Cj]=O(_2). (33)
Coexistence and Spatial Variation
As we shall see below, these assumptions and theirimmediate consequences mean that the magnitudes ofthe four mechanisms in the expression below are eachO(_2), facilitating their comparison.
From (30) and (31), the model can be written in thefollowing general quadratic form
*j&1rEj&Cj+#j EjCj , (34)
where the symbol ``r'' means equal to o(_2)), and #j isthe cross-partial derivative
#j=�2*j
�Ej �Cj }Ej=Cj=0
. (35)
Note that as *j is a function of Ej and Cj , it, like them, isa random variable taking particular values when spaceand time are specified. The simplicity of expression (34)is a consequence of parameter standardization. It is anexact equation whenever *j takes the form
*j=Gj (Ej , C)=d+A(Ej )+B(Cj )+hA(Ej ) B(C j ),
(36)
where constants d and h, and functions A and B, maydepend on the species j.
To determine the invader rate of increase, *� i , we canuse the fact that the species do belong to the same guildand therefore have certain features in common that canbe used to relate the rates of increase of different speciesto one another. The idea of membership in the same guildmight be expressed mathematically in terms of functionalrelationships between the competition parameters ofdifferent species. Here we assume that for each invaderspecies i, and each set of residents, there is a function fexpressing the competition parameter for the invader interms of the competition parameters of the residents:
C&ii =f ((C&i
r )r{i). (37)
Note that when the residents are at equilibrium, i.e.,C&i
r =Cr*, r{i, then C&ir =0, r{i. Thus, using Eq. (37)
the invader competition parameter when the residentsare at their equilibrial values is
C&ii *=f (0). (38)
The regional finite rate of increase, *� r , of a resident isnecessarily equal to 1. Using this fact, we obtain thefollowing seemingly trivial equation,
223
*� i&1=*� i&1& :n
r{i
q ir(*� r&1), (39)

where the qir are positive constants to be determined.To calculate the *� j , recall from Eq. (7) that *� j can beexpressed as the sum of the simple average of *j overspace and the spatial covariance of *j and relativedensity. Thus, combining Eqs. (7) and (39) and approxi-mation (34) leads to the approximation
*� i&1r2E&2C+2I+2}, (40)
where (with expectation, E, meaning spatial average andCov meaning spatial covariance)
2E=E[Ei ]& :n
r{i
qirE[Er], (41)
2C=E[C&ii ]& :
n
r{i
qirE[C&ir ], (42)
2I=#iE[Ei C&ii ]& :
n
r{i
qir#rE[ErC&ir ], (43)
and
2}=Cov(*i , vi )& :n
r{i
q ir Cov(*r , vr). (44)
The choice of qir that makes the decomposition (40)the sharpest biological comparison makes use of therelationship (37) between the invader and the residentcompetition parameters to define qir as
qir=�C&i
i
�C&ir }C r
&i=0, r{i. (45)
With this definition, linear relationships between thespecies in their dependence on common competitivefactors are factored out of 2C (Chesson, 1994). More-over, Eq. (40) rearranges further to
*� ir*� $i&2N+2I+2}, (46)
where
*� $i&1=2E&Ci&i * (47)
and
&i
224
2N=2C&Ci *. (48)
In (46) the different components of *� i refer to distinctcoexistence mechanisms, as is now explained.
Interpretation of *� $i . Simply put, the quantity *� $i is thefinite rate of increase that the invader would experiencein the absence of spatial variation; it measures the effectsof variation-independent coexistence mechanisms. It ismost easily understood by expressing competition interms of competitive factors,
Cj=, j(F)=1&Gj (Ej*, ,$j(F)), (49)
where, as this equation indicates, ,j may also depend onthe equilibrial values of the environmentally-dependentparameters. If F&i* is a value of F consistent with C&i
r =0,r{i, then
Ci&i *=, i (F&i*), (50)
which is the value of competition that the invaderexperiences as a consequence of the resource equilibriumthat the residents create. Note that with the assumptionabove that C&i
i is a function of [C&ir , r{i], the value of
expression (50) is unique although there is no necessityfor F&i* to be unique.
A negative value of Ci&i* means that invasion of
species i is favored by the resident equilibrium: residentequilibrial competition is less competition than needed tokeep species i from the system. One particular examplewith a single competitive factor is Tilman's R* rule(Tilman, 1982) applying to the case where species in acommunity are limited by a single resource (F=R, theresource density). A negative value of Ci
&i * in that situa-tion means that the R* value for species i is lower thanthat of resident species. Corresponding remarks apply forthe P* rule of Holt, Grover, et al. (1994) for apparentcompetition and to the F* rule that we use here toembrace both competition and apparent competition.With just a single competitive factor, Ci
&i* can only benegative for one species, reflecting the fact that only onespecies can persist at equilibrium under those circumstances.However, with multiple competitive factors, and differentspecies more strongly limited by different competitivefactors, it is possible for Ci
&i * to be negative for allspecies, potentially allowing equilibrium coexistence.
The contribution of the Ci&i* term to coexistence must
be added to the other terms in the equation, most impor-tantly to 2E from which it is not truly separate. If this 2Ewere zero, then *� $i would just be 1&Ci
&i*. However, 2Etakes account of the possibility that the means of the
Peter Chesson
environmental responses, EEj , may not be zero; in otherwords the variation in Ej may not be centered at zeroeither because E[Ej]{Ej* or because Ej is a nonlinearfunction of Ej . From the development in (Chesson, 1994)

it can be seen that, to o(_2), Ci&i*&2E can be inter-
preted as the value of Ci&i * that would apply if the Ej*
were adjusted to make the EEj equal to 0, which wouldmean 2E=0. As the Ej* are arbitrary one might ask, whynot choose them so that the EEj are zero? The answer isthat this is not always the most natural thing to do. Forexample, in the case of a single competitive factor, whichis of considerable interest in the study of varying environ-ments, it seems most natural to choose the same equi-librial value of the competitive factor for all species sothat fluctuations in F about this common equilibrialvalue can be considered. The value of the Ej* for each speciesis then determined by the the equation Gj(Ej*, ,$j(F*))=1.If the Ej did not vary spatially and each took the value 0,then in general the community would be neutrally stable:over time F could be expected to approach the commonF* value everywhere in space, but average densities ofthe species would not be fixed as there would be an n&1dimensional set of values of (N� 1 , N� 2 , ..., N� n), each pointof which would be a neutrally-stable equilibrium. Suchneutral equilibria have limited generality. Having EEj
different from zero destroys this neutral equilibrium andin most cases with a single competitive factor leads tocompetitive exclusion in a constant environment, asdiscussed above. For example, with a two-species system,the 2E values of the two species would be of oppositesign and the species with positive 2E would exclude theother.
An alternative way of specifying nonneutrality wouldbe to have different F* values for different species, whilesetting EEj=0. These F* values could not differ from oneanother by more than O(_2) under the assumptions ofAppendix III for the quadratic approximation to beapplicable and for *� $i to be no larger in magnitude thanO(_2). Although a valid approach, specifying differentF* values for different species produces complications inthe development of the 2N term, which is presentedbelow. However, one important interpretational com-plication arises when the EEj are not zero. The commonF* is not a species characteristic and is not the same F*that specifies a winner in competition according to theF* rule. To apply the F* rule for competitive exclusionin a constant environment, one must calculate a species-specific F* as the value of F for which *j=1 given theactual value of Ej that applies to species j. If the specieshave the same functions Gj and ,$j then these species-specific F* values are ranked in order of the Ej and thewinner in competition in a constant environment is the
Coexistence and Spatial Variation
species with the largest value of Ej .Interpretation of 2N. The quantity 2N, which measures
spatial relative nonlinearity of competition, is best under-stood in terms of competitive factors. As shown in (Chesson,
1994) all linear terms in competitive factors disappearfrom 2N by virtue of the definition of the qir . Left overare quadratic and higher terms, of which only the quad-ratic terms are of sufficient magnitude to be of concernhere. To understand these, we define
8(2)j =\
�2Cj
�F l �Fm+*
, (51)
where the parentheses mean the matrix with row andcolumns respectively l and m over the indices 1, 2, ..., p(the number of competitive factors) and the * meansevaluated at F*. Defining
9= 12 \8 (2)
i & :r{i
q ir8 (2)r + , (52)
it follows that
2N=trace[9V(F)], (53)
where V(F) is the matrix of variances and covariancesamong the elements of F. Naturally, in the case of a singlecompetitive factor, this expression is simply the productof two numbers: 9V(F ). As shown in Chesson (1994) forthe temporal case, this single competitive factor caseadmits coexistence of at most two species by relative non-linearity alone. The values of 9 for the two species arenecessarily of opposite sign, as are the values of 2E. Forcoexistence, that species with the relatively more concavefinite rate of increase as a function of F (the one withpositive 9 ) must be the one with the advantage in 2E,i.e., must be the one with a positive 2E. There must alsobe higher variance in F when this species is a residentthan when the other species is a resident. The quan-titative details are given in Chesson (1994, Sect. 5.2).
Interpretation of 2I. The term 2I, the storage effect,has a major influence on the ability of species to coexistin a spatially variable environment. Because E[Ej ] andE[C&i
j ] are both O(_2), 2I can be put in the more usefulform
2Ir#i/&iii & :
n
r{i
qir #r/&irr , (54)
225
where
/&ilj =E(El&EEl ) } (C&i
j &EC&ij ), (55)

``covariance between environment and competition,'' anddiffers from EEl C
&ij by O(_4). A further rearrangement of
(54) leads to a still more meaningful expression
2I=&qi (1&5i Pi ) 1/, (56)
where / is the vector of resident covariances betweenenvironment and competition, 1 is the diagonal matrixof resident # values, Pi is the diagonal matrix with r thdiagonal element to the ratio of the correlation coeffi-cients, corr(Ei , C&i
r )�corr(Er , C&ir ), r{i, 5i is a diagonal
matrix with rth diagonal element equal to (#i - V(Ei))�(#r - V(Er)), 1 is the (n&1)_(n&1) identity matrix, andqi is the row vector of qir values. The derivation followssimply by approximating C&i
i as a linear function of theC&i
r (see Chesson, 1994). Expression (56) is most easilyunderstood by reference to the following two-speciescase.
With a system consisting of just two species (n=2),pure spatio-temporal environmental variation, a cell-based spatial structure, and local competition a functionof the local environment (Eq. 4), Pi reduces to the scalar\=corr(Ei , Er), and so expression (56) reduces to thescalar equation
2I=&qir(1&5i \) #r/&irr . (57)
The last part of this formula, #r/&irr , represents the inter-
action between environment and competition for theresident species. The correlation coefficient \ measuresspecies-specific responses to the environment with \=&1being most specific and \=1 being not specific at all. Thequantity 5i measures symmetry between species in theirjoint responses to environmental conditions and com-petition. In this formula, the resident covariance betweenenvironment and competition, /&i
rr , is the only quantitythat might represent a difficult calculation, but it cancommonly be approximated up to o(_2) using linearapproximation techniques, as discussed for the temporalcase (Chesson, 1989), and as follows for symmetric multi-species cases.
There are many ways that species may be related toeach other in multispecies settings, but of particularinterest is the case where species are limited by a commoncompetitive factor, precluding stable coexistence inspatially and temporally homogeneous settings. Thisbeing the case, we can assume that
Cj=; j(C&C*)+O(_2) (59)
226
for the common competitive factor C, which is assumedexpressible as a function of the local densities andenvironmentally-dependent parameters, i.e., in the form
(4), which requires cell-based population structure. TheO(_2) term in (59) allows the consideration of distinctcompetition parameters for different species providedthat distinctiveness is only O(_2). Such distinctions arelarge enough to affect *� $i , and possibly 2N, but cause atmost o(_2) effects in 2I. Note that as each of *� $i , 2N, 2I,and 2} is O(_2), assumption (59) is not a greatly restric-tive requirement. A more specific assumption is that eachV(Ej)=_2, and Cov(Ej , El )=\_2 for i{j, and environ-mental variation is pure spatio-temporal. The equalvariance assumption is less restrictive than at face value,for the environmentally-dependent parameters can betransformed to make this assumption more nearly satis-fied in a given setting. The calculations below are thenapplied to those transformed parameters. The covarianceassumption is more specific. It implies that the environ-mental responses of different species are equally relatedto one another. Together with the assumption of com-mon competition it means that each species is similarlyaffected by all other species. In other words, species inter-actions are diffuse (Chesson, 2000).
Define
Ar=�C&i
�Er }Er=0, r{i, ar=EAr , and :r=
�Er
�Er }Er=Er*
.
(60)
Also define the following general notation for averagesover products of parameters of resident species
ab } } } =1
n&1:
r{i
arbr } } } . (61)
The calculations for the temporal case (Chesson, 1994)apply identically here to show that
2Ir&;i _2[(1&\) :2a#+\:a(n&1)(:#&:i #i )].
(62)
In this formula, the ar , and hence all the average termscontaining them, are commonly on the order of 1�(n&1)(see the examples below), which is understandable becausethe more resident species there are, the less each is likely tocontribute to the total competition experienced. Of theterms inside [ ], (:#&:i#i) measures asymmetries betweenspecies in the interaction between environment and com-
Peter Chesson
petition; this term averages to zero over species. Notetherefore that the average over species of 2I�; i equals_2(1&\) :2a#, which may be thought of as the averagestrength of the storage effect for this guild because ;i

simply represents the rate of response to common com-petitive factors and in many cases (see the examplesbelow) is a scaling factor in all components of *� i&1 andtherefore cancels out of any comparison between compo-nent mechanisms. The term _2(1&\) can be thought ofas the species-specific component of the environmentalresponse because _2\ is the fraction of variance in Ej thata species has in common with other species. If :2a# isproportional to 1�(n&1), as commonly seems the case(see the examples below), the average strength of thestorage effect is proportional to _2(1&\)�(n&1), whichtherefore increases with the species-specific component ofvariance and decreases with the number of competitorsthat a species has. This decline in strength of the coexistencemechanism with the number of competitor species is acommonly observed feature of coexistence mechanismsin the presence of diffuse competition (Chesson, 2000),which is assumed in these calculations. It is not specifi-cally a property of the storage effect.
Interpretation of 2}. Insight on the effects of covariancebetween relative density and the rate of increase, which ismeasured by 2}, is available on the assumption thatvjx=1+O(_). As shown in Appendix III, this require-ment holds in particular for the case of pool dispersalwith local retention presented in the covariance betweenrelative density and rate of increase section above. Thisassumption means that (vj&1) EjCj=O(_3) and there-fore that
Cov(*j , vj )rCov(Ej , vj )&Cov(Cj , vj ). (63)
With pure spatio-temporal variation, the first term onthe RHS is zero, and the covariance between *j and vj isjust a covariance between local density and competition.This is the important effect arising in the spatial Lotka�Volterra competition model of Bolker and Pacala (1999)where there is no environmental variation and Eq. (63) isexact as a consequence of the quadratic form of themodel. Because residents cause competition, in manycases Cov(Cj , vj ) is likely to be positive for residents andlesser in magnitude for invaders. Thus, in instances ofpure spatio-temporal environmental variation, the term2} is likely to be positive, promoting coexistence.However, there are no general results demonstrating this
Coexistence and Spatial Variation
effect at the present time.In the case of pure spatial variation, the component
Cov(Ej , vj ) of Cov(*j , vj) does not vanish and potentiallyhas major effects. Assuming pool dispersal with local
retention, it is shown in Appendix III for both residentsand invaders that
vjx=1+( p�q)(*jx&1)+O(_2) (64)
and hence that
Cov(*j , vj )r( p�q) V(*j ), (65)
which implies that invaders gain an advantage in terms of2} if they have higher spatial variance in their finite ratesof increase than residents. This variance can be expandedin terms of variance in the environmentally-dependentand competition parameters and the covariance betweenthem using approximation (40) above, but it is mostinstructive in the symmetric case where G is the same foreach species and there is a common competitive factor, asexplicitly assumed in the section above on covariancebetween the rate of increase and relative density. All thissymmetry means that qir =1�(n&1), and then 2} reducesto
pq _
1n&1
:r{i /&irr &/&i
ii & , (66)
which takes a form identical to the storage effect in suchsymmetric situations. In fact it is equivalent to 2I with#=&p�q. Thus, in this symmetric situation, 2} can beregarded as simply replacing # with #&p�q. As # will benegative in the common subadditive coexistence-promoting scenario, the effect of 2} will commonly beequivalent to an enhanced storage effect, consistent withthe earlier findings above.
EXAMPLES
Three examples illustrate the concepts and techniquesdeveloped here.
Model of Insects Laying Eggs in EphemeralPatches of Food
This model, which is described above in the section
227
on the general model, is most easily analyzed with asymmetric competition structure with intraspecific coef-ficients, :jj , the same for each species j (equal to :), andinterspecific coefficients, :jl , j{l, all equal to ;. So that

the effects of differences between interspecific and intra-specific competition are of comparable magnitude to theeffects of a variable environment, I shall assume that:&;=O(_2). Natural choices for the equilibrial valuesare E i*=1 and C i*=1. With these definitions, we findthat
Ej=Ej&1 and Cj=1&erj (1&Cj). (67)
This model is spatially implicit, and so it is possible towork with Hj rather than Gj ; Hj (Ej , Cj )&1 can beexpressed as the exact quadratic form
*j vj&1=Ej&Cj&EjCj (68)
from which it is immediately apparent that #j=&1.Although this formula is exact, we will nevertheless makeuse of small variance approximations to estimate theexpected values of its components, viz. *� $i , 2N, and 2I.Because these are based on Hj rather than Gj , the term2} does not appear. For these calculations, rather thanuse Ej as the environmentally-dependent parameter, it isbetter to transform to the log scale and use =j=ln Ej . Onthis scale, the symmetry assumptions _2=V(=j ) and \=corr(=j , =l ), for any j and l, are more reasonable. Inaddition, define +j=E[=j]=O(_2). Using the symmetriccompetition structure assumed above, the competitionparameter can be expressed simply in terms of twocompetitive factors,
Cj=F+Fj , (69)
where
F=; :n
l=1
ElN l and F j=(:&;) E jN j . (70)
As :&;=O(_2) this means Cj=F+O(_2), a fact thatallows the calculations of relative nonlinearity and thestorage effect to proceed as if there were only one com-petitive factor. This is not so, however, for *� $i , where thefull expression for Cj is important.
Table 1 gives the values of various parameters basedon the assumptions of this model. To calculate *� $i , notethat as the invader does not experience intraspecific
228
competition,
C &ii =F. (71)
TABLE 1
Parameters of the Insect Aggregation Model
:j 1;j rj
#j &1
qisri�rs
n&1+(:&;)�;=
r i �rs
n&1+O(_2)
F*;(n&1)
;(n&1)+:&;
9 &ri
2(ri&r� )
Substituting the equilibrial value of F* from Table 1, wesee that
Ci&i *=1&exp {ri \1&
;(n&1);(n&1)+:&;+=
r&ri (1&;�:)
n&1, (72)
which means that
*� $ir2E+ri (1&;�:)
n&1. (73)
The formula for 2E can be written in terms of the +s and_2 as follows
2Erri \+ i+12 _2
r i&
1n&1
:s{i
+s+12 _2
rs + , (74)
which in the case of equal rs, just reduces to the differencebetween +i and the average of the +s of i 's competitors.
To calculate 2I, we can make use of the symmetricenvironment theory for one competitive factor above,noting that Eq. (59) is satisfied here and so the symmetrictheory applies. The fact that the :j are all 1 and the #j areall &1 makes this especially simple. The only quantitythat is at all difficult to calculate is a� =&:2a#, which isshown in Appendix IV to be 1�(n&1)+O(_2). It followsthat
Peter Chesson
2Irri_2(1&\)
n&1. (75)

To calculate 2N, we can consider F to be the onlycompetitive factor, and then taking 9 from Table 1, wehave
2Nr&ri
2(ri&r� ) V(F ) (76)
which leaves us with the thorny issue of the value ofV(F ). A little algebra shows this to reduce to
V(F )r;2_2 \(1&\) :s{i
N� 2s +\ _ :
s{i
N� s&2
+ . (77)
The sum of the resident densities at their equilibrium is1�;+O(_2) (Appendix IV), but it is not so easy to deter-mine the sum of the squares unless the residents haveidentical parameters, in which case they have equaldensities and the sum of squares is therefore 1�;2(n&1)+O(_2), which means that in this special case, which isthe only case for a single resident (n=2),
2Nr&ri
2(ri&r� ) _2 \1&\
n&1+\+ . (78)
We see that 2N boosts the invasion rate of species thathas a high value of ri relative to its competitors. A specieswith a lower ri suffers a disadvantage. Unlike the storageeffect, relative nonlinearity gives the invasion rates of allspecies no uniform boost. Its effect therefore must be con-sidered in terms of how it trades off against other terms.For example, examining 2E we see that for positive +s,species with relatively lower +s should be disadvantaged.But to interpret that scenario, we have to decide what the+s mean. If there is no mortality during dispersal, i.e., therj already take into account losses that would occurduring dispersal, then E[Ejx]=1, which implies that+j+
12 _2=o(_2), preventing appreciable variation in the
+s between species and rendering the 2E term abovenegligible. However, in other cases, + j might reasonablybe assumed to reflect survivorship during dispersal. Then+j+
12 _2 must be negative, and the formula for 2E
implies that high survival is essential to compensate forsmall ri , which may also compensate for the disadvan-tage arising from 2N.
The full expression for *� i&1 is the combination of Eqs.(73), (75), and (76). For the special case of equal valuesof the rj , *� i&1 takes on the particularly simple form
*� i&1r+i&+� +r1&;�:
+_2 1&\. (79)
Coexistence and Spatial Variation
\ n&1 n&1+The case of equal rj naturally elminates any effect ofrelative nonlinearity from this expression, which is the
price of simplicity. This expression, however, containsthe features most important to multispecies coexistence,for, as we have seen, relative nonlinearity gives nouniform boost to growth from low density. The twomechanisms that remain are resource partitioning, whosemagnitude is measured by (1&;�:)�(n&1), and thestorage effect, represented by _2(1&\)�(n&1). Thesetwo mechanisms take on very similar forms becausethey both assume diffuse competition; i.e., each speciescompetes similarly with every other species.
Resource partitioning is a variation-independentmechanism and could represent differential dependenceof the insect larvae on the different food substancesor qualities within a patch. The variation-dependentmechanism, the storage effect, may be looked upon asresource partitioning on a larger spatial scale with dif-ferences in the Ejx between species representing speciesdifferences in oviposition preferences at the level of thepatch. Much of the literature on species coexistence inthis and related models refers to ``aggregation'' as themechanism of coexistence (Atkinson and Shorrocks,1981; Ives, 1988), but Ives (1988) emphasizes thataggregation must be greater within species than betweenspecies and that this may come about by differentialresponses of searching females to environmental condi-tions. Interpreted in this way, aggregation as a mechanismof coexistence is a special case of the spatial storage effect.
The Lottery Model
The lottery model is for perennial sedentary iteroparousorganisms with larvae dispersing widely in space (Chesson,1985). It has particular application to coral reef fish com-munities where the arrival of larvae ready to settle on a reefvaries greatly in time and space and is often discussed underthe heading of recruitment variation. The spatial lotterymodel is specified by the equation
Njx(t+1)=(1&$j ) N jx(t)+Ejx(t) N� j(t)�C$jx(t), (80)
where Njx is the number of adults of species j at locationx, $j is the adult death rate ((1&$j) Njx(t) is the numberof adults surviving from time t to time t+1), andEjx(t) N� j(t) is the number of juveniles arriving at site xduring the interval t to t+1. These juveniles represent
229
the pooled reproduction and larval survival from allsites, which are then redistributed into sites depending onspatio-temporally-varying site characteristics, capturedby the environmentally-dependent parameter Ejx(t). These

juveniles compete with juveniles of all species for spacevacated by adult death according to the formula
C$jx= :n
l=1
Elx N� l (t)< :n
l=1
$lN lx(t). (81)
Comins and Noble (1985) define a similar model with theEj representing spatio-temporally-varying competitiveability, with dispersal being widespread with localretention.
Assuming that the environment is pure spatio-temporallyvariable, we can take a conditional expectation in (80) toobtain
E[Nj (t+1) | E1 , ..., En]=H j (Ej , C ) N� j (t), (82)
where
Hj (Ej , C)=1&$ j+Ej �C (83)
and the common competition parameter is
C= :n
l=1
ElN� l(t)< :n
l=1
$l N� l (t).
The difference between C$j and C is simply that C$j dependson the actual amount of space, �l $lNlx , available forjuveniles at a particular site, x, while C depends on theaverage amount of space competed for over all sites,�l $l N� l .
As C is a common competitive factor, it is natural hereto choose a common equilibrial value C* for Cj . Theequilibrium relationship (34) therefore means thatEj*=$j C*.
The standard parameters become
Ej=$j (Ej �Ej*&1) (84)
and
Cj=$j (1&C*�C ) (85)
and the quadratic approximation is exact here becauseEq. (83) is in the form (36) with #j=&1�$j . As the Cj arelinearly related between species, there is no relative non-linearity (2N=0). The qir are easily seen to be equal to$i �[$r(n&1)]. Again assuming a symmetric variancestructure for the Ej on a log scale, and defining +j=E[ln Ej ]&ln $j , it follows from the results in the quan-
230
titative section that
*� i&1r$i (+i&+� )+$i_2(1&\)
n&1, (86)
where the first term on the RHS is *� $i and the second termis 2I. Note that C* does not appear in this expression.Although an arbitrary choice, it is unimportant in thefinal result.
These results provide an interesting comparison withthe temporal form of the lottery model (Chesson, 1994),where complex relative nonlinearity terms intrude when-ever the $s vary with the species and, where the storageeffect disappears as $i approaches 1, the nonoverlappinggeneration case. They show in particular that spatio-temporal recruitment variation has the potential to be animportant mechanism of coexistence for coral reef fishesand also for other organisms where migration of disper-sive forms into patches is spatio-temporally variable anddifferential between species.
The Annual Plant Model
The annual plant model given above also takes anexact quadratic form. Note that, as defined, Cj is inde-pendent of j and is once again a common competitivefactor and that a common value C* of Cj* will be chosen.In the absence of variation, there would only be onewinner in competition in this system. Analogous toTilman's R* rule for determining the winner in competi-tion, there is a natural C* rule here for determining thatwinner. Let C� j* be the value that would keep species j atequilibrium when the environment is fixed at E[Ej ].Then without variation in space the winner in competi-tion would be the species with the largest value of C� j*. Tosee what happens when there is spatial variation in theenvironment, assume that seeds are widely dispersed sothat the local neigborhood density can be approximatedby the regional density, N� j , and assume locally varyinggermination fractions, Ej , with symmetric variancestructure on a log scale. Then, as is shown in Appendix V,
*� i&1=%i
C* {(C� i*&C� *)+C*&1n&1
_2(1&\)= , (87)
where %i=1&si (1&E[Ei]) (the mean fraction of seedsthat are lost from the seed bank by germination or deathin one unit of time), C� * is the resident average of the C� j*,and C* is the common equilibrial value of the Cj . HereC* is probably most appropriately defined as the averageover all species of C� j*, which differs a little from C� *, andthe average only over the residents.
This formula exhibits the interesting fact that the
Peter Chesson
stronger competition is on average, as determined by C*,the stronger storage effect up to a finite supremumapproached when C* is much larger than 1. At that pointonly proportional differences in the competition tolerated

by different species are important, consistent with theclaims of (Chesson and Huntly, 1997) that coexistencedoes not depend on the magnitude of competition. Incontrast to the temporal version of this model (Chesson,1994), there is no relative nonlinearity, and again thestorage effect does not vanish in the spatial case whengenerations are nonoverlapping, i.e., when si=1.
DISCUSSION
This work has a different approach than commonlypursued in theoretical modeling studies in communityecology. Rather than take one model that is presumedrepresentative of a class of models and study it in detail,with the hope of drawing general conclusions, the approachhere is to study a class of models with the expectation ofelucidating general principles that demonstrably apply toall models in the class. The outcomes are principles thatmay at first appear rather abstract and mathematical inform, but when investigated further can been seen to bethe development of biological concepts that can beunderstood in terms of the features of specific systems.Second, as a by-product of the general analysis, this workprovides methods by which specific models can beanalyzed.
This work has been successful in extending to the spatialdomain concepts and principles previously demonstratedfor models in a temporally varying environment. Ithas shown that the three major classes of coexistencemechanisms previously identified for models of temporalvariation, viz. variation-independent mechanisms andthe two variation-dependent mechanisms (relative non-linearity of competition and the storage effect), havenatural analogues in the spatial domain. However, thesetwo variation-dependent mechanisms arise under dif-ferent circumstances in the spatial context. Unlike thetemporal storage effect, the spatial storage effect does notrely on life-history stages insensitive to environment andcompetition. Instead, dispersion of the population inspace provides the requisite buffering. Indeed, givenspecies-specific responses to spatially-varying environ-mental factors, the spatial storage effect seems to beinevitable under realistic scenarios and seems best regardedas a formalization of the concepts of spatial and spatio-temporal niches. In contrast, spatial relative nonlinearityseems to arise under more restricted conditions than
Coexistence and Spatial Variation
temporal relative nonlinearity, at least in simple models,but requires further study to assess its importance.
This work has also suggested that species coexistencein the presence of spatial variation involves phenomena
with no direct temporal analogues. These new phenomenaarise from covariance between local population growthand local population density. The formula for growthof an invader, which is used to quantify coexistence,contains an additional term due to this covariance that isnot present in the temporal case. The behavior of thisterm has not been studied in general but the special casesinvestigated here suggest that it may be best regarded asmodifying the storage effect and relative nonlinearity,rather than as entirely new. However, the limited evidencepresented here suggests that it potentially has a very power-ful role promoting species coexistence in the presenceof spatial variation. This phenomenon was exploredrecently in a spatial version of the lottery model by Mukoand Iwasa (2000). Recent findings of Bolker and Pacala(1999) on species coexistence relying on differingdispersal distances in a spatially explicit model appear tobe a special case of this phenomenon.
The most serious shortcoming of this work is theabsence of a full definition of the circumstances underwhich the invasion criterion can be defined and imple-mented. The rate of recovery of a population from lowdensity seems a very natural way of quantifying thestrength of species persistence in a system, but hasreceived insufficient study in spatial models. It mostclearly applies in spatially implicit models where isit related to persistence in the sense of permanence(Hutson, Moran, et al., 1983; Hutson and Vickers, 1983;Hutson and Law, 1985; Law and Morton, 1996). As usedhere, the invasion criterion requires a stable point equi-librium for the regional-scale densities of residents andcorresponding stationary behavior of the patterns ofspatio-temporal fluctuations. The majority of spatialmodels of competition that do not specifically includepure temporal environmental variation have thisproperty, although some models of predator�prey inter-actions lead to long-term cycles and spatial homogeneity.An understanding of coexistence as a result of temporalfluctuations, however, is given in previous work (Chesson,1994), which this article extends to space. Missing thereforefrom current knowledge is a general approach capable ofincorporating both spatial variation and temporal varia-tion that persists at the level of the total regional popula-tion. There is at least one particular example, the lotterymodel (Chesson, 1985), in which a full range of possibili-ties for variation in space and time is considered andsolved, but the general case has not been addressed andis beyond the scope of this article.
231
Within the limitations discussed above, however, theapproach used here does provide a very general under-standing of the opportunities for species coexistence in aspatially-varying environment. Moreover, the quadratic

approximation technique implemented in the specificexamples is a powerful method for uncovering the behaviorof simple models in elementary terms. This technique isonly implemented here for spatially-implicit models, and itis bound to be much more difficult to apply in spatially-explicit models with local dispersal. However, the quad-ratic representation of local population growth given hereis exact in many simple cases even with spatially-explicitmodels; therefore, the decomposition of the invader growthrate into four terms representing different mechanisms isexact also. Factors affecting these terms, such as nonad-ditivity and relative nonlinearity, are simple to obtainanalytically even if other features, such as variances incompetitive factors and covariance between environmentand competition, are more difficult to estimate and mayrequire simulation or other forms of approximation suchas moment closure approximations (Bolker and Pacala,1997). Thus, the techniques presented here provideimportant information on the nature and properties ofthe mechanisms occurring in a model even when they donot lead to full quantification of the mechanism.
APPENDIX I
It is often helpful to adopt the perspective of formalprobability theory and add to each of Ejx(t), Cjx(t), andNjx(t) a fourth argument, |, which belongs to a samplespace 0 with associated _-field and probability measure.Then Ejx(t), Cjx(t), and Njx(t) would be random variablesthemselves, not realizations of random variables Ej , Cj ,and Nj . For example, in simulations of the system, Ejx(t),Cjx(t), and Njx(t) would take different values in differentsimulations, with Ejx(t, |), Cjx(t, |), and Njx(t, |) beingrealized values and | being equivalent to the randomnumber seed. This perspective is most helpful in discus-sion of the concepts of pure spatial variation and purespatio-temporal variation. Pure spatio-temporal environ-mental variation can then be defined as the situation wherethe vector random variables (E1x(t), ..., Enx(t)) are inde-pendently and identically distributed over all pairs oftimes and locations (t, x). For pure spatial variation(E1x(t), ..., Enx(t)) is independently and identicallydistributed over locations x, but is constant over time.
Under this perspective, the expected value E[Gj(Ejx(t),Cjx(t))], as formally defined in probability theory, wouldin general depend on x and therefore would not be equiv-
232
alent to the spatial average implied by the expressionE[Gj(Ej , Cj )] (Eq. 8). However, for many spatialgeometries used in modeling, and for many suitableinitial conditions, it is possible to assume without loss of
generality that the vector of stochastic processes (Ejx(t),Cjx(t), Njx(t), j=1, ..., n, t�0) has the same distributionfor every x. For this to be true, it just has to be possibleto randomize the values of Ejx , and any initial condi-tions, relative to the location in space. For example,consider space to be intertidal habitat around an island,which is topologically equivalent to a circle. A location xis a point on the circle, and it will have certain fixedenvironmental characteristics due, for example, towhether it is on the north or south side, facing theprevailing currents, or in their lee. It will also havetemporally varying characteristics due, for example, totemporal variation of currents. The stochastic process[Ejx(t), t�0] is assumed to summarize these charac-teristics. Regardless of the spatially fixed nature of somefactors contributing to [Ejx(t), t�0], the [Ejx(t), t�0]can be made formally identically distributed for differentx by random choice of the origin for the measurement ofx. Such randomization has no effect on the nature ofthe model, but it does render expected values such asE[Gj(Ejx , Cjx)] independent of x. With effectivelyinfinite space and an ergodic theorem implying degenerateconvergence of spatial averages, expectations such asE[Gj(Ejx(t), Cjx(t))] are then equal to their correspond-ing spatial averages. If the critical variables (Ejx(t),Cjx(t), Njx(t), j=1, ..., n) cannot be set up so that theyhave the same distribution for every x, then the expectedvalues of the text (e.g., E[Gj(Ej , Cj )]) have to be definedexplicitly as spatial averages. In the limit of large space,these spatial averages are equivalent to the spatial averagesof the expectationfor each spatial location (e.g., E[Gj(Ejx(t),Cjx(t))]), which would naturally be the most convenientway of calculating them mathematically.
APPENDIX II
Equation (25) for the model with pure spatial varia-tion and widespread dispersal implies the followingiteration for relative local density:
vjx(t+1)=p(*jx(t)�*� j (t)) v jx(t)+q. (88)
Assuming that residents come to an equilibrium at eachlocality, resident values of *x are constant over time. Forresidents, Eq. (88) implies the following equation forresident relative densities:
Peter Chesson
vrx=q
1&p*rx. (89)

The invader's *x are also constant over time as they dependonly on the temporally-constant environment andtemporally-constant resident densities. Thus, invaderrelative densities are given by the equation
vix=q
1&p*ix �*� i
. (90)
From the fact that the *� j values are the spatial averagesof vjx *jx=vjxG(Ejx , C jx) we see that
E _ qG(Er , C&ir )
1&pG(Er , C &ir )&=*� r=1 (91)
and for invaders
E _ qG(Ei , C &ii )
1&pG(Ei , C &ii )�*� i&=*� i . (92)
Equation (92) rearranges to
E _ qG(Ei , C &ii )
*� i&pG(Ei , C &ii )&=1. (93)
As the LHS of Eq. (93) is a decreasing function of *� i itfollows that *� i is greater than 1 if and only if the followinginequality is satisfied
E _ qG(Ei , C &ii )
1&pG(Ei , C &ii )&>E _ qG(Er , C &i
r )1&pG(Er , C&i
r )& , (94)
in other words if and only if
Ef (G(Ei , C&ii ))>Ef (G(Er , C&i
r )),
where f is defined by the equation f (G)=qG�(1&pG), asstated in the text.
To see when f (G(E,C)) is subadditive, the cross partialderivative works out to be
�2f (G(E, C ))�E �C
=f"(G(E, C ))�G�E
}�G�C
+f $(G(E, C))�2G(E, C)
�E �C. (96)
The first term on the RHS is negative, as G decreases inC and increases in E. The second term is zero for additive
Coexistence and Spatial Variation
G and negative for subadditive G. Thus, the wholeexpression is negative ( f (G(E, C)) is subadditive)whenever G is subadditive, additive, or merely weaklysuperadditive.
To see when covariance between environment andcompetition occurs in this model, assume that C&i
rx =f (Erx , Nrx)=f (Erx , N� rvrx), for some function f, and letf1 and f2 refer to partial derivatives with respect to thefirst and second arguments of f (similarly for G); then
dC&irx
dErx=f1+N� r
dvrx
dErxf2 . (97)
But Eq. (89) implies that
dvrx
dErx=pq \G1+G2
dC&irx
dErx +<(1&pG )2. (98)
Substituting into (97) and rearranging gives
dC&irx
dErx=( f1+pqN� r f2G1 �(1&pG )2)�
(1&pqG2N� 2 f2 �(1&pG )2). (99)
As both numerator and denominator are positive when-ever f1�0, we see that as Erx varies in space, C&i
rx variesas an increasing function of Erx , which implies positivecovariance.
APPENDIX III
I shall prove order relations Cj=O(_), and E[Cj ]=O(_2) just for cell-based models, with local populationsizes being continuous variables. First of all note that fora random variable, such as Cj , the statement Cj=O(_)will be taken to mean that |Cj |<k_ for some nonrandomquantity k that does not vary with t, x, _, or the | ofAppendix I. Note also that the conclusion Cj=O(_) willgenerally be false for integer population sizes and realisticdemographic stochasticity, and so there is no pointtrying to cover that case.
To begin with, we shall assume that there is a commoncompetition parameter for different species and that itcan be written as a function of the local environmentally-dependent parameters, Ex(t)=(E1x(t), ..., Enx(t)), andlocal densities Nx(t)=(N1x(t), ..., Nnx(t)):
Cx(t)=f (Ex(t), Nx(t)). (100)
233
Assume also that the appropriate equilibrial values havebeen subtracted so that the environmentally-dependentand competition parameters vary about zero. Assuming

that the functions Gj are smooth, the assumption thatEj=O(_) means also that Ejx(t)=O(_).
Define *x(t) } Nx(t)=(*1x(t) N1x(t), ..., *nx(t) Nnx(t)),and
C$x(t+1)=f (Ex(t+1), *x(t) } Nx(t)). (101)
Note that C$x(t+1) is the competition parameter thatwould apply at time t+1 if there were no dispersal fromor to the patch. Using regulatory conditions (given below)on the functions Gj and f, Chesson (1994, Appendix II)shows that there are constants k>0 and \<1 such that,whenever |Cx(t)| is sufficiently small,
|C$x(t+1)|<\ |Cx(t)|+k_. (102)
This result implies that
supx
|C$x(t+1)|�\ supx
|Cx(t)|+k_. (103)
We add here the assumption
|Cx(t+1)|�supx
|C$x(t+1)|+k$_ (104)
which is an assumption about the nature of competitionand dispersal to be discussed below. With assumption(104), inequality (103) becomes
supx
|Cx(t+1)|�\ supx
|Cx(t)|+(k+k$) _. (105)
This means that
|Cx(t)|�(k+k$) _�(1&\) (106)
for all t whenever |Cx(0)| is sufficiently small, i.e., when-ever |Cx(0)|�(k+k$) _�(1&\) for _ sufficiently small.This proves the required result Cj=O(_) whenever thereis a common competitive factor and the appropriateregularity conditions hold.
These regularity conditions are stated as follows:Let = be a positive number and let the vectors E, E$, N,
N$, and scalar C satisfy the conditions, |E|<=, |E$|<=,| f (E", N)|<= for some E" with |E"|<=, N$=N }G(E, C), and |C |<=, where G(E, C )=(G1(E1 , C ), ...,Gn(En , C )).
With these constraints holding, define
234
\=sup } 1+� f (E, N } G(0, C ))
�C } , (107)
k1=sup |{ f (E$$$, N$)|E$$$=E$ , (108)
where { is the operator (���E1$$$, ..., ���En$$$), and
k2=sup |{f (E$$$, N } G(E, C))| E$$$=E . (109)
The regularity conditions are then that for = sufficientlysmall, these quantities are all finite and \<1. Then, k isdefined as 2k1+k2 . That k1 and k2 should be finiteis essentially a smoothness condition on the functions.Competition naturally has negative feedback to itself,and the condition on \ ensures that this negative feed-back is stabilizing.
A final condition was introduced here that has nocounterpart in the temporal models and that is |Cx(t+1)|�supx |C$x(t+1)|+k$_. This means that any increase inlocal density due to dispersal cannot increase competitionany more than O(_) above the maximum competitionapplicable if there were no dispersal. This is not a greatlyrestrictive assumption under realistic dispersal andcompetition scenarios.
All of the above is simply for the case of a commoncompetitive factor. Following Chesson (1994) this resultextends to the case where the competition parameterscan be expressed in the form
Cjx(t)=Cx(t)+h jx(t) (110)
with |h jx(t)|<k j_2 for constants k j .To obtain the result E[Cj ]=O(_2), we first consider a
resident ( j=r), and we assume that dispersal and localdynamics are such that vrx&1=O(_). Given the quad-ratic approximation, we have
0=E[(*r&1) vr]rEEr vr&ECrvr+#EEr Crvr . (111)
Now Ervr=O(_2)=ErCrvr and so their expected valuesare O(_2) also. Therefore, Eq. (111) implies ECrvr=O(_2). Given vrx&1=O(_), this means ECr=O(_2) too.Equation (110) coupled with smoothness of the functionsGj now implies that ECi=O(_2), which then covers allthe needed cases.
Note that in the case of pure spatial variation andwidespread dispersal with retention, formula (89) ofAppendix II justifies the requirement vrx&1=O(_):formula (89) implies that
vrx=1+( p�q)(*rx&1)+O((*rx&1)2), (112)
and the results in this appendix show that (*rx&1)=
Peter Chesson
O(_), from which the statement vrx&1=O(_) follows.The results here also imply that (*ix&1)=O(_), whichimplies *� i&1=O(_). Substituting this in Eq. (90) we seethat vix&1=O(_). Combining this with the fact that

E[*i ]=O(_2), from the results above, leads to *� i&1=O(_2). Substituting this back in Eq. (90), we can see thatvix=1+( p�q)(*ix&1)+O(_2), which proves Eq. (64) ofthe text for j=i as well as j=r.
APPENDIX IV
For the model of insects laying eggs in ephemeralpatches of food, we need to calculate a� . Now
C&i=; :s
Es Ns , (113)
which means As=;Ns , and so
a� =;
n&1:
s{i
N� s . (114)
Because Ej=1+O(_) and E[Ej]=1+O(_2), we cansubstitute 1 for the Ej in the resident growth equationEHs(Es , C &i
s )=1 to give the approximation
exp {rs \1&; :r{i
N� r+(:&;) N� s+==1+O(_2),
(115)
which implies
; :r{i
N� r+(:&;) N� s=1+O(_2). (116)
Summing over residents, s, reveals the result
:s{i
N� s=n&1
(n&1) ;+(:&;)+O(_2) (117)
which then implies
a� =;
(n&1) ;+(:&;)+O(_2)
=1
n&1+O(_2), (118)
as stated in the text. This means also that �s{i N� s=
Coexistence and Spatial Variation
(1�;)+O(_2). Although this formula for the residentdensities may not appear to be the closest approxima-tion, it is on the same order of accuracy as approximation(117) and gives a more understandable result.
APPENDIX V
In the annual plant model, for simplicity assume thatthe different species all have the same value : of :j , thecompetitive effect of a seedling of species j. Here, we shalluse the symbol :j for the quantity �Ej ��=j evaluated underequilibrial conditions, where =j=ln Ej and Ej is thegermination fraction. The small effects approximationswill all be done on the log scale, and therefore =j will besubstituted for Ej in the relevant formulae. We choose acommon equilibrial value C* for the competition param-eters. The Ej* are determined by C* and the sj . The basicparameters derived from these are given in Table 2.Calculating 2I by making use of the symmetry assump-tions, note that :j#j=&1 and therefore :#&:i#i=0.Also, :2a#=&:a, with
:r{i
:rar= :r{i
:N� rEr*=C*&1+O(_2), (119)
and hence :2a#=&(C*&1)�(n&1). It follows that
2I=;iC*&1n&1
_2(1&\). (120)
There is no relative nonlinearity and, with a commoncompetitive factor and a concensus choice C* for equi-librial competition, Ci
&i*=0. It remains to calculate 2E.The formula for qir from the table means
2E=;i \EEi
; i&
1n&1
:r{i
EEr
;r + , (121)
but ; j=(1&sj[1&Ej*])�C*=(1&sj[1&E[Ej])�C*+O(_2), and as EEj=O(_2), it follows EEj�; j=C*EEj�%j+o(_2), where %j=(1&sj[1&E[Ej]). However,C*EEj �%j+C*=C� j*, the equilibrium value of competi-tion for species j with the germination faction constant atE[Ej ]. It follows that 2E can be written as
2E=;i (C� i*&C� *). (122)
TABLE 2
Parameters of the Annual Plant Model
235
:j 1&sj
;j (1&sj[1&E j*])�C*#j &1�(1&sj)qir ;i �;r(n&1)

Combining the formulas for 2E and 2I and noting that%j �C* can be substituted for ;j without changing theorder of accuracy of the results, we obtain Eq. (87).
ACKNOWLEDGEMENTS
I am grateful to Tony Ives, Claudia Neuhauser, and Steve Pacala forcomments on drafts of this manuscript. This work was supported inpart by NSF Grant DEB 9981926.
REFERENCES
Abrams, P. 1984. Variability in resource consumption rates and thecoexistence of competing species, Theor. Popul. Biol. 25, 106�124.
Armstrong, R. A., and McGehee, R. 1976. Coexistence of speciescompeting for shared resources, Theor. Popul. Biol 9, 317�328.
Armstrong, R. A., and McGehee, R. 1980. Competitive exclusion,Amer. Natur. 115, 151�170.
Atkinson, W. D., and Shorrocks, B. 1981. Competition on a dividedand ephemeral resource, J. Anim. Ecol. 50, 461�471.
Bascompte, J., and Sole, R. V. 1998. ``Modeling SpatiotemporalDynamics in Ecology,'' Springer-Verlag, New York.
Bolker, B., and Pacala, S. 1999. Spatial moment equations for plantcompetition: understanding spatial strategies and the advantages ofshort dispersal, Amer. Natur. 153, 575�602.
Bolker, B., and Pacala, S. W. 1997. Using moment equations to under-stand stochastically driven spatial pattern formation in ecologicalsystems, Theoret. Popul. Biol. 52, 179�197.
Chesson, P. 1994. Multispecies competition in variable environments,Theor. Popul. Biol. 45, 227�276.
Chesson, P. 1996. Matters of scale in the dynamics of populations andcommunities, in ``Frontiers of Population Ecology, CSIRO''(R. B. Floyd, A. W. Sheppard, and P. J. DeBarro, Eds.), pp. 353�368, CSIRO, Melbourne.
Chesson, P. 1998. Making sense of spatial models in ecology, in``Modeling Spatiotemporal Dynamics in Ecology'' (J. Bascompteand R. V. Sole, Eds.), pp. 151�166, Springer-Verlag, New York.
Chesson, P. 2000. Mechanisms of maintenance of species diversity, Ann.Rev. Ecol. System. 31, 343�366.
Chesson, P., and Huntly, N. 1997. The roles of harsh and fluctuatingconditions in the dynamics of ecological communities, Amer. Natur.150, 519�553.
Chesson, P. L. 1981. Models for spatially distributed populations: theeffect of within-patch variability, Theor. Popul. Biol. 19, 288�325.
Chesson, P. L. 1982. The stabilizing effect of a random environment,J. Math. Biol. 15, 1�36.
Chesson, P. L. 1985. Coexistence of competitors in spatially andtemporally varying environments: a look at the combined effects of
236
different sorts of variability, Theor. Popul. Biol. 28, 263�287.Chesson, P. L. 1988. Interactions between environment and competi-
tion: how environmental fluctuations mediate coexistence andcompetitive exclusion, in ``Lecture Notes in Biomathematics,''Vol. 77, pp. 51�71, Springer-Verlag, Berlin�New York.
Chesson, P. L. 1989. A general model of the role of environmentalvariability in communities of competing species, in ``Lecture Noteson Mathematics in the Life Sciences,'' Vol. 20, pp. 97�123, Amer.Math. Soc., Providence, RI.
Chesson, P. L. 1990. Geometry, heterogeneity and competition invariable environments, Philos. Trans. Roy. Soc. London, Ser. B 330,165�173.
Chesson, P. L., and Ellner, S. 1989. Invasibility and stochasticboundedness in monotonic competition models, J. Math. Biol. 27,117�138.
Chesson, P. L., and Huntly, N. 1988. Community consequences oflife-history traits in a variable environment, Ann. Zool. Fenn. 25,5�16.
Chesson, P. L., and Warner, R. R. 1981. Environmental variabilitypromotes coexistence in lottery competitive systems, Amer. Natur.117, 923�943.
Comins, H. N., and Noble, I. R. 1985. Dispersal, variability, and transientniches: species coexistence in a uniformly variable environment, Am.Natur. 126, 706�723.
Durrett, R., and Levin, S. 1994. The importance of being discrete (andspatial), Theor. Popul. Biol. 46, 363�394.
Ebenho� h, W. 1991. Temporal organization in a multispecies model,Theor. Popul. Biol. 42, 152�171.
Ellner, S. 1989. Convergence to stationary distributions in two-speciesstochastic competition models, J. Math. Biol. 27, 451�462.
Hanski, I. A., and Gilpin, M. E. 1997. ``Metapopulation Biology:Ecology, Genetics, and Evolution,'' Academic Press, San Diego.
Hassell, M. P., May, R. M., Pacala, S. W., and Chesson, P. L. 1991. Thepersistence of host-parasitoid associations in patchy environments.I. A general criterion, Am. Natur. 138, 568�583.
Holt, R. D. 1984. Spatial heterogeneity, indirect interactions, and thecoexistence of prey species, Am. Natur. 124, 377�406.
Holt, R. D. 1997. From metapopulation dynamics to commun-ity structure: some consequences of spatial heterogeneity, in``Meta-population Biology: Ecology, Genetics and Evolution''(I. A. Hanski and M. E. Gilpin, Eds.), pp. 149�164, Academic Press,San Diego.
Holt, R. D., Grover, J., and Tilman, D. 1994. Simple rules for inter-specific dominance in systems with exploitative and apparentcompetition, Am. Natur. 144, 741�771.
Holt, R. D., and Lawton, J. H. 1994. The ecological consequences ofshared natural enemies, Ann. Rev. Ecol. System. 25, 495�520.
Hutson, V., and Law, R. 1985. Permanent coexsistence in generalmodels of three interacting species, J. Math. Biol. 21, 285�298.
Hutson, V., Moran, W., and Vickers, G. T. 1983. On a criterion for sur-vival of species in models governed by difference equations, J. Math.Biol. 18, 89�90.
Hutson, V., and Vickers, G. T. 1983. A criterion for permanent coexistenceof species with an application to a two-prey, one-predator system,Math. Biosci. 63, 253�269.
Ives, A. R. 1988. Covariance, coexistence and the population dynamicsof two competitors using a patchy resource, J. Theor. Biol. 133,345�361.
Iwasa, Y., and Roughgarden, J. 1986. Interspecific competition amongmetapopulations with space-limited subpopulations, Theor. Popul.Biol. 30, 194�214.
Klopfer, E. D., and Ives, I. R. 1997. Aggregation and the coexistence of
Peter Chesson
competing parasitoid species, Theor. Popul. Biol. 52, 167�178.Law, R., and Morton, R. D. 1996. Permanence and the assembly of
Ecological Communities, Ecol. 77, 762�775.Levin, S. A. 1970. Community equilibria and stability, and an extension
of the competitive exclusion principle, Amer. Natur. 104, 413�423.

Loreau, M. 1992. Time scale of resource dynamics, and coexistencethrough time partitioning, Theor. Popul. Biol. 41, 401�412.
Muko, S., and Iwasa, Y. 2000. Species coexistence by permanent spatialheterogeneity in a lottery model, Theor. Popul. Biol. 57, 273�284.
Namba, T. 1984. Competitive co-existence in a seasonally fluctuatingenvironment, J. Theor. Biol. 111, 369�386.
Neuhauser, C. P., and Pacala, S. W. 1999. An explicitly spatial versionof the Lotka�Volterra model with interspecific competition, Ann.Appl. Prob. 9, 1226�1259.
Pacala, S. W. 1987. Neighborhood models of plant populationdynamics 3. Models with spatial heterogeneity in the physicalenvironment, Theor. Popul. Biol. 31, 359�392.
Pacala, S. W., and Levin, S. A. 1997. Biologically generated spatialpattern and the coexistence of competing species, in ``SpatialEcology, The Role of Space in Population Dynamics and Inter-specific Interactions'' (D. Tilman and P. Kareiva, Eds.), pp. 204�232,Princeton Univ. Press, Princeton.
Pacala, S. W., and Silander, J. A. 1985. Neighborhood models of plantpopulations dynamics I. Single-species models of annuals, Am.Natur. 125, 385�411.
Rees, M., Grubb, P. J., and Kelly, D. 1996. Quantifying the impactof competition and spatial heterogeneity on the structure anddynamics of a four-species guild of winter annuals, Am. Natur. 147,1�32.
Root, R. B. 1967. The niche exploitation pattern of the blue-graygnatcatcher, Ecological Monographs 37, 317�350.
Coexistence and Spatial Variation
Roughgarden, J., and Iwasa, Y. 1986. Dynamics of a metapopulationwith space-limited subpopulations, Theor. Popul. Biol. 29, 235�261.
Shigesada, N. 1984. Spatial distribution of rapidly dispersing animals inheterogeneous environments, in ``Lecture Notes in Biomathematics,''Vol. 54, pp. 478�501, Springer-Verlag, Berlin�New York.
Shigesada, N., and Kawasaki, K. 1997, ``Biological Invasions: Theoryand Practice,'' Oxford Univ. Press, Oxford.
Shmida, A., and Ellner, S. 1984. Coexistence of plant species withsimilar niches, Vegetatio 58, 29�55.
Slatkin, M. 1974. Competition and regional coexistence, Ecology 55,128�134.
Thomas, C. D., and Hanski, I. 1997. Butterfly metapopulations, in``Metapopulation Biology: Ecology, Genetics, and Evolution''(I. Hanski and M. E. Gilpin, Eds.), pp. 359�386, Academic Press,San Diego.
Tilman, D. 1982. ``Resource Competition and Community Structure,''Princeton Univ. Press, Princeton.
Tilman, D. 1994. Competition and biodiversity in spatially structuredhabitats, Ecology 75, 2�16.
Tilman, D., Lehman, C. L., and Thomson, K. T. 1997. Populationdynamics in spatial habitats, in ``Spatial Ecology: The Role ofSpace in Population Dynamics and Interspecific Interactions''(D. Tilman and P. Kareiva, Eds.), pp. 3�20, Princeton Univ. Press,Princeton.
Turelli, M. 1981. Niche overlap and invasion of competitors in randomenvironments, Theor. Popul. Biol. 20, 1�56.
237