Embed Size (px)
Citation preview
GCAPS TeamGCAPS TeamDesign ReviewDesign Review
CPE 450 Section 1CPE 450 Section 1January 21, 2008January 21, 2008
Nick HebnerNick HebnerKooper FrahmKooper Frahm
Ryan WeissRyan Weiss
IntroductionIntroduction
►General Problem StatementGeneral Problem Statement In order to ultimately create an In order to ultimately create an
autonomous transportation system, autonomous transportation system, position and orientation information is position and orientation information is required. This project entails the required. This project entails the development of a reliable position data development of a reliable position data acquisition system and a means of acquisition system and a means of translating it into useful state information. translating it into useful state information. The vehicle must localize itself based on The vehicle must localize itself based on its knowledge of surroundings.its knowledge of surroundings.
IntroductionIntroduction
►Client - Chris ClarkClient - Chris Clark Cal Poly professorCal Poly professor Specialized experience with Specialized experience with
Artificial Intelligence, Artificial Intelligence, Autonomous Mobile Robots, Autonomous Mobile Robots, and Multi-Robot Systemsand Multi-Robot Systems
Founded the Cal Poly Founded the Cal Poly Autonomous Transportation Autonomous Transportation System Project (CPATS)System Project (CPATS)
IntroductionIntroduction
►Related WorkRelated Work Precise Vehicle Localization Using Multiple Precise Vehicle Localization Using Multiple
Sensors and Natural LandmarksSensors and Natural Landmarks►GPS, GIS Mapping, Visual Landmarks, Kalman GPS, GIS Mapping, Visual Landmarks, Kalman
FilterFilter A Visual Positioning System for Vehicle or A Visual Positioning System for Vehicle or
Mobile Robot NavigationMobile Robot Navigation►Stereo Vision, Feature extraction/trackingStereo Vision, Feature extraction/tracking
2D Map-Building and Localization in 2D Map-Building and Localization in Outdoor EnvironmentsOutdoor Environments
►Laser Landmark Detection, Kalman Filter, GPSLaser Landmark Detection, Kalman Filter, GPS
Formal Product DefinitionFormal Product Definition
► Need StatementNeed Statement Current vehicles are often prone to failure when Current vehicles are often prone to failure when
mistakes are made by their operators. Of the many mistakes are made by their operators. Of the many possible systems that could aid operators, one of possible systems that could aid operators, one of the most basic and important is a self-localization the most basic and important is a self-localization system which models the state of the vehicle at all system which models the state of the vehicle at all times.times.
In the long run, transportation systems may be In the long run, transportation systems may be operated entirely by computer systems, providing operated entirely by computer systems, providing a safer and more efficient ride. Among the many a safer and more efficient ride. Among the many requirements for such a system is the ability to requirements for such a system is the ability to know the current position of the vehicle at all times know the current position of the vehicle at all times and use these data to efficiently transport people.and use these data to efficiently transport people.
Formal Product DefinitionFormal Product Definition
► ObjectivesObjectives Self Localization.Self Localization. The system needs to know where The system needs to know where
it is at all times with relation to its surroundings. it is at all times with relation to its surroundings. Generation of a meaningful sensor and visual Generation of a meaningful sensor and visual
image processing algorithm.image processing algorithm. The system will The system will implement a mechanism for making decisions and implement a mechanism for making decisions and signaling if any changes are necessary. The signaling if any changes are necessary. The algorithm will need to process data received from algorithm will need to process data received from the image processing unit in conjunction with the the image processing unit in conjunction with the data from the wheel encoder and translate this data from the wheel encoder and translate this into meaningful action.into meaningful action.
State Estimation.State Estimation. The system needs to track its The system needs to track its position (x,y) and heading (θ) around a small loop position (x,y) and heading (θ) around a small loop providing live feedback. providing live feedback.
Formal Product DefinitionFormal Product Definition
►RequirementsRequirements MarketingMarketing
►The system should be able to distinguish unique The system should be able to distinguish unique markings in the ground to help with self-location.markings in the ground to help with self-location.
►The system should be able to determine distance The system should be able to determine distance traveled between any given markings, and total traveled between any given markings, and total distance traveled.distance traveled.
►The system should be fully autonomous, meaning The system should be fully autonomous, meaning completely run from a machine in conjunction completely run from a machine in conjunction with a computer, without any human interaction.with a computer, without any human interaction.
Formal Product DefinitionFormal Product Definition
►RequirementsRequirements EngineeringEngineering
►The system will use a Particle Filter (fusion The system will use a Particle Filter (fusion system) to make positional determinations system) to make positional determinations based on image processing and wheel encoding.based on image processing and wheel encoding.
►The system must support image detection as a The system must support image detection as a primary means of determining position.primary means of determining position.
►The system must support wheel encoding to The system must support wheel encoding to provide a distance and vector change to all provide a distance and vector change to all possible “particles” generated by the Particle possible “particles” generated by the Particle Filter.Filter.
Formal Product DefinitionFormal Product Definition
►RequirementsRequirements Engineering (cont.)Engineering (cont.)
►The system will have an onboard computer The system will have an onboard computer that controls all functions of golf-cart that controls all functions of golf-cart operation.operation.
►The system will have an onboard camera that The system will have an onboard camera that has auto focus.has auto focus.
►The system will have wheel encoders, both The system will have wheel encoders, both incremental and absolute to provide distance incremental and absolute to provide distance and angle measurements, respectively.and angle measurements, respectively.
Formal Product DefinitionFormal Product Definition
► RequirementsRequirements ConstraintsConstraints
► A vision system is to be used to detect visual A vision system is to be used to detect visual landmarks that are used by the fusion system in landmarks that are used by the fusion system in determining position.determining position.
► A second sensor system (encoding) needs to provide A second sensor system (encoding) needs to provide distance and angle measurements for all particles in the distance and angle measurements for all particles in the system.system.
► Position must be known within an accuracy of 10 cm.Position must be known within an accuracy of 10 cm.► The system must navigate and determine its position The system must navigate and determine its position
while moving around a circle.while moving around a circle.
Formal Product DefinitionFormal Product Definition
►CriteriaCriteria Positional detection error (smaller = better) Positional detection error (smaller = better) Frequency of positional updates (higher = Frequency of positional updates (higher =
better) better) Computational time (lower = better)Computational time (lower = better) Artificial landmark dimensions (smaller = Artificial landmark dimensions (smaller =
better) better) Deployment cost (time) (smaller = better) Deployment cost (time) (smaller = better) Deployment cost (money) (smaller = better)Deployment cost (money) (smaller = better) Production cost (smaller = better)Production cost (smaller = better)
DesignDesign
►Overview of Team ProcessOverview of Team Process Problem StatementProblem Statement Requirements SpecificationRequirements Specification DesignDesign ImplementationImplementation TestingTesting MaintenanceMaintenance Final ReportFinal Report
DesignDesign
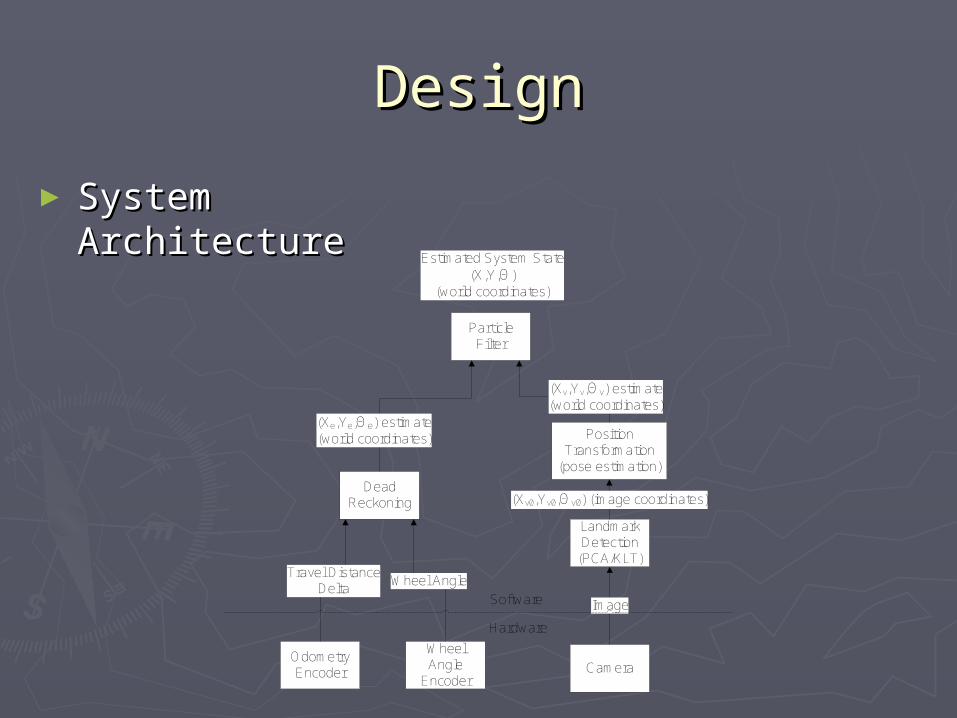
► System ArchitectureSystem Architecture
Particle Filter
Dead Reckoning
Position Transformation
(pose estimation)
Landmark Detection
(PCA/KLT)
(Xv0,Yv0,Θv0) (image coordinates)
Camera
Image
(Xv,Yv,Θv) estimate(world coordinates)
(Xe,Ye,Θe) estimate(world coordinates)
Odometry Encoder
Wheel Angle
Encoder
Travel Distance Delta
Wheel Angle
Software
Hardware
Estimated System State (X,Y,Θ)
(world coordinates)
DesignDesign
►Particle FilterParticle Filter The fusion system that combines data The fusion system that combines data
from the image and encoding systems to from the image and encoding systems to determine location.determine location.
►OdometryOdometry The system that measures distance and The system that measures distance and
angle of the cart and passes the data to angle of the cart and passes the data to the fusion algorithm.the fusion algorithm.
DesignDesign
► Image ProcessingImage Processing The system that takes images and uses a The system that takes images and uses a
technique called Principle Components technique called Principle Components Analysis (PCA) to determine position and Analysis (PCA) to determine position and send the data to the fusion system.send the data to the fusion system.
Pose estimation is a method of comparing Pose estimation is a method of comparing a given image to a set of images for use a given image to a set of images for use with PCA.with PCA.
DesignDesign
►Hardware DesignHardware Design The CPU and adjacent hardware The CPU and adjacent hardware
components are interfaced with the camera components are interfaced with the camera and encoder units listed in the system and encoder units listed in the system architecture diagram through USB and/or architecture diagram through USB and/or serial connections.serial connections.
►Software AlgorithmsSoftware Algorithms PCA – used for determining PCA – used for determining
position from pose estimation. position from pose estimation. ►Available through OpenCV and/or Available through OpenCV and/or
Matlab.Matlab.
DesignDesign
► Software Algorithms (cont.)Software Algorithms (cont.) Particle Filtering (Loop over time step t)Particle Filtering (Loop over time step t)
►For i = 1 …N►Pick xt-1[i]from Xt-1►Draw xt[i]with probability p( xt[i]| xt-1[i], ot)►Calculate wt[i]= p( zt| xt[i])►Add xt[i]to XtTemp►For j = 1 …N►Draw xt[j]from XtTempwith probability wt[j]►Add xt[i]to Xt► Steps 1 through 5 represent the Prediction steps, 6 Steps 1 through 5 represent the Prediction steps, 6
through 8 are the correction steps.through 8 are the correction steps.
DesignDesign
► Software AlgorithmsSoftware Algorithms Dead ReckoningDead Reckoning
► The algorithm takes the distance and angle The algorithm takes the distance and angle measurements from the odometry and passes this measurements from the odometry and passes this information to the fusion system.information to the fusion system.
► Mechanical DesignMechanical Design Wheel encoders must be fastened to the test Wheel encoders must be fastened to the test
vehicle for appropriate measurement.vehicle for appropriate measurement. The mechanical design still needs thought as the The mechanical design still needs thought as the
parts have not arrived and method of fastening parts have not arrived and method of fastening the encoders and the camera is not clear.the encoders and the camera is not clear.
DesignDesign
► ComponentsComponents Image Processing - tImage Processing - the responsibility of the image he responsibility of the image
processing component is to receive data and process the processing component is to receive data and process the information. Small markings will be used as landmarks for information. Small markings will be used as landmarks for the system to locate itself and ensure proper operation. the system to locate itself and ensure proper operation.
Landmarks - tLandmarks - the landmarks will be small markings on the he landmarks will be small markings on the faces of curbs or the street that the system uses to faces of curbs or the street that the system uses to determine its location. determine its location.
Wheel Encoder - tWheel Encoder - the responsibility of the wheel encoder is he responsibility of the wheel encoder is to provide a mechanical means of data to be passed to the to provide a mechanical means of data to be passed to the Particle Filter. The wheel encoder is able to count the Particle Filter. The wheel encoder is able to count the rotations of the wheel and accurately pass this information rotations of the wheel and accurately pass this information to the fusion algorithm. The encoder will be mounted in to the fusion algorithm. The encoder will be mounted in one of the wheel hubs to enable accurate counting.one of the wheel hubs to enable accurate counting.
DesignDesign
►Components (cont.)Components (cont.) Laptop PC - tLaptop PC - the responsibility of the laptop he responsibility of the laptop
is to provide the processing capability of is to provide the processing capability of all the necessary components. The all the necessary components. The platform will be an x86 architecture platform will be an x86 architecture running a Linux operating system.running a Linux operating system.
Processing Algorithm - tProcessing Algorithm - the main he main processing of the system will be processing of the system will be accomplished with the use of a Particle accomplished with the use of a Particle Filter. Filter.
Test PlanTest Plan► PCA TestPCA Test
Synthesized imagesSynthesized images Input live image, compare to correlated training Input live image, compare to correlated training
imageimage► Straight Line TestStraight Line Test
Initialize Golf-cart’s positionInitialize Golf-cart’s position Flat, feature-absent roadFlat, feature-absent road Mid-day, typical lightingMid-day, typical lighting No GUI, measure and compareNo GUI, measure and compare
► Feature-rich RoadsFeature-rich Roads Road may contain natural features and deformationsRoad may contain natural features and deformations
► Curved Paths & Circular PathsCurved Paths & Circular Paths Realistic roadsRealistic roads U-turnsU-turns
Budget and JustificationBudget and Justification
►The budget has not been determined, The budget has not been determined, and therefore cannot be justified.and therefore cannot be justified.
Bill of MaterialsBill of Materials
►Logitech QuickCam Pro (for notebooks) Logitech QuickCam Pro (for notebooks) $57.06$57.06
►Quadrature Wheel Encoder Modules Quadrature Wheel Encoder Modules $57.94$57.94
►Total Total $115.00$115.00
ReferencesReferences
► Precise Vehicle Localization Using Multiple Sensors Precise Vehicle Localization Using Multiple Sensors and Natural Landmarksand Natural Landmarks Ullrich Scheunert, Heiko Cramer, Gerd WanielikUllrich Scheunert, Heiko Cramer, Gerd Wanielik
► A Visual Positioning System for Vehicle or Mobile A Visual Positioning System for Vehicle or Mobile Robot NavigationRobot Navigation Huei-Yung Lin, Jen-Hung LinHuei-Yung Lin, Jen-Hung Lin
► 2D Map-Building and Localization in Outdoor 2D Map-Building and Localization in Outdoor EnvironmentsEnvironments R. Madhavan, H. F. Durrant-WhyteR. Madhavan, H. F. Durrant-Whyte
► Visual Learning and Recognition of 3-D Objects from Visual Learning and Recognition of 3-D Objects from AppearanceAppearance H. Murase, S. K. NayarH. Murase, S. K. Nayar
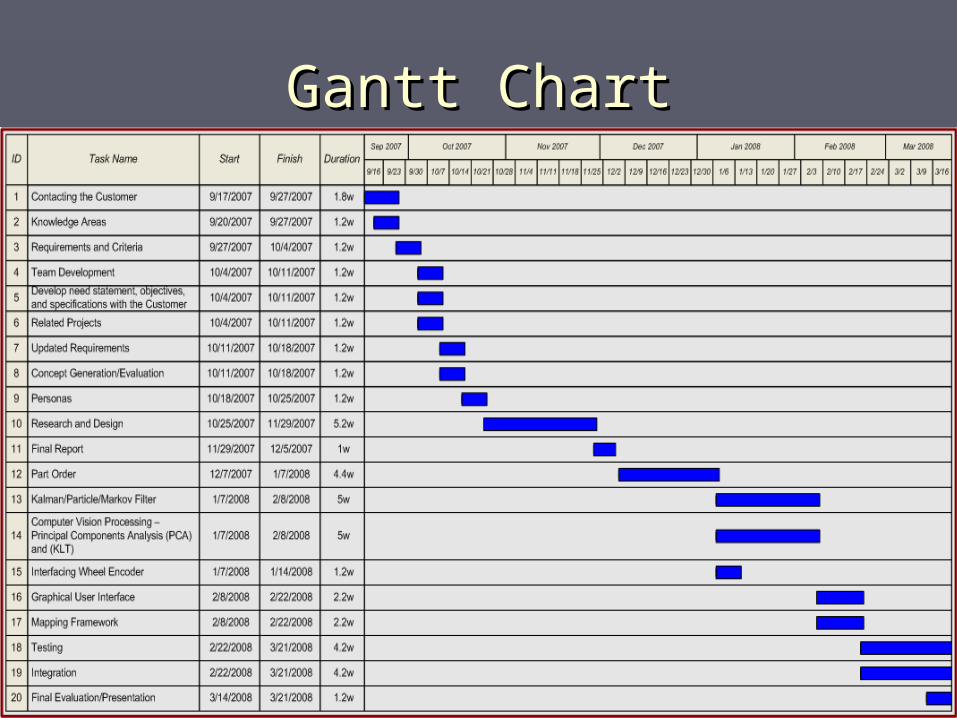
Gantt ChartGantt Chart





























