Embed Size (px)
Citation preview

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 1/61
Modéliser le développement des capacités
d’interaction:
Le robot comme outil de simulation au
service des sciences cognitives
Philippe Gaussier* Neurocybernetics Group, Cergy Pontoise University, France

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 2/61
Our approach…
Find a minimal model justified by strong theoretical arguments:
• Taking into account a minimal number of biologicalstructures,
• Trying to understand what is brought by a given input or
structure as the global behavior si concerned (otherwise not
taken into account),
• Using robots to test the behavioral consequences of a given
model (proof by failure!)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 3/61
Cognition, cerveau, neurones...
Les limites d’une démarche réductionniste…

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 4/61
« Virtual » Laboratory
Joint works with
Jean Paul Banquet : neurobiological modelling+ Bruno Poucet (Marseille 3C): neurobiology
Jacqueline Nadel: developmental psycho pathology
(+ inter-lab. association CNRS)
• Lola Cañamero (Feelix growing UE STREP project)
Adaptive Systems Research Group, University of Hertfordshire, UK

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 5/61
Plan:
1. Interaction et apprentissage:
Un modèle sensori-moteur minimaliste
2. Problèmes dans les interactions Homme-robot (imitation)
3. Modéliser les émotions?
4. Emotions dans les interactions Homme-robot
5. Perspectives…
Double fonction de l’imitation et des émotions
crucial pour la modélisation
Implications dynamiques complexes
Utiliser les modèles pour valider des thérapies
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 6/61
1ere partie
Interaction et apprentissage:
Un modèle sensori-moteur minimaliste

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 7/61
7
En général : robot dans son environnement physique
• Contrôle moteur : le bras ,les roues,etc. Quel espacede travail ?
• Quelles informationstraiter ? fusion ?
• Référentiel ?
• Dynamique du système ?
mouvements du bras, de latête ?
• “one body psychology” : étude du système seul dans son
environnement physique
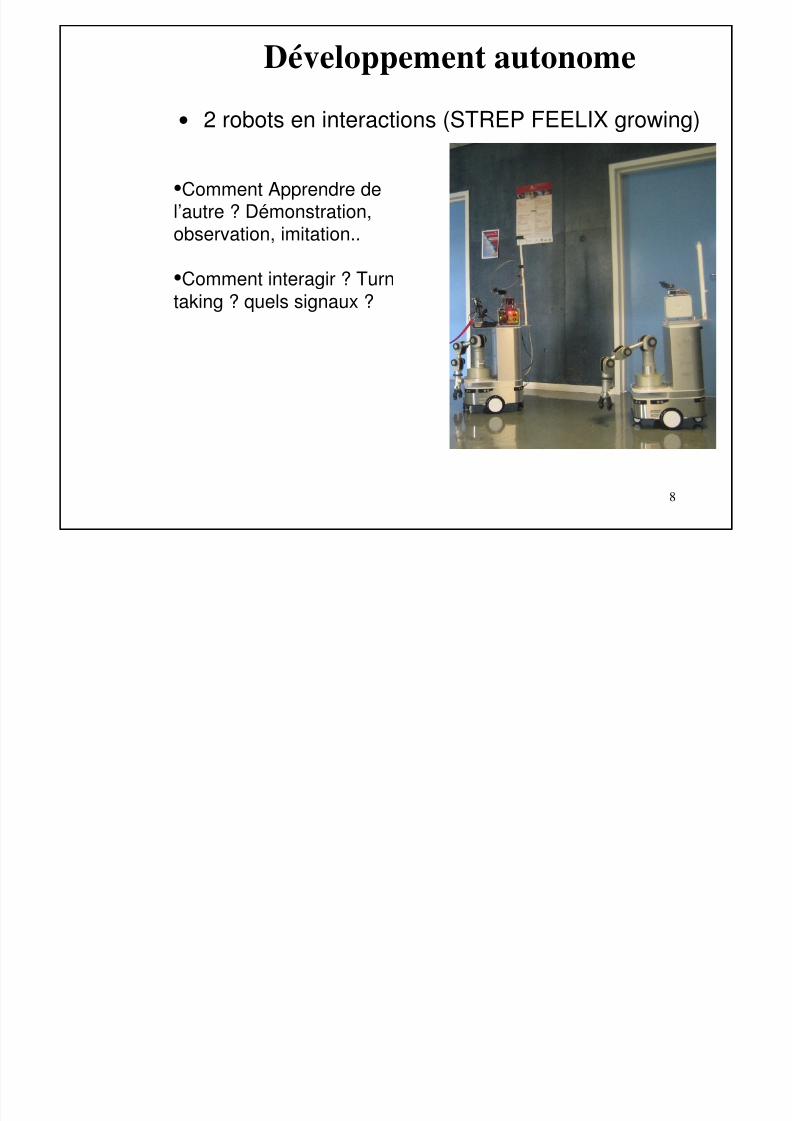
Développement autonome
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 8/61
8
• 2 robots en interactions (STREP FEELIX growing)
•Comment Apprendre del’autre ? Démonstration,observation, imitation..
•Comment interagir ? Turn
taking ? quels signaux ?
Développement autonome
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 9/61
9
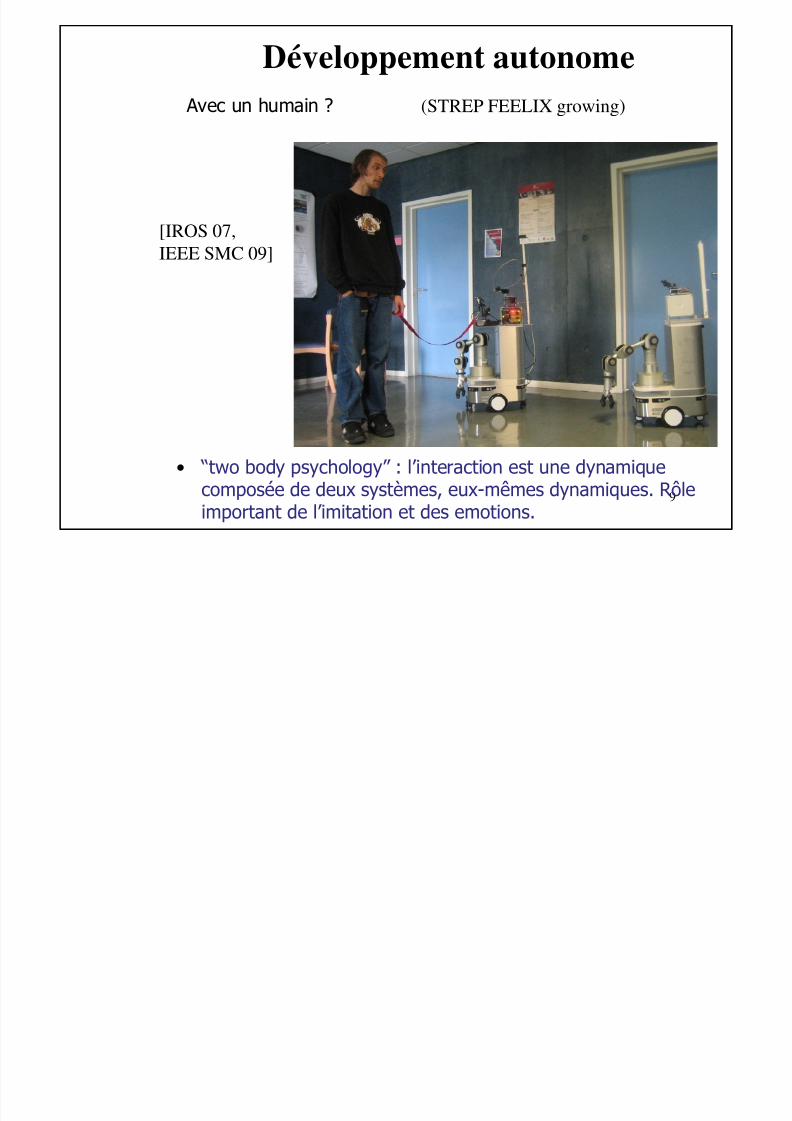
Avec un humain ? (STREP FEELIX growing)
• “two body psychology” : l’interaction est une dynamique
composée de deux systèmes, eux-mêmes dynamiques. Rôleimportant de l’imitation et des emotions.
Développement autonome
[IROS 07,
IEEE SMC 09]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 10/61
Modèle du développement
• Apprentissage de comportements moteurscomplexes
• Modéliser le développement cognitif d’un bébé(< à 9 mois)
• Architectures neuronales pour l’imitationmécanisme de bootstrap
Development and
psychopathology
UMR 7593 (Paris)
J. Nadel
ETIS, UMR 8051
(Cergy)Neurocybernetics team
P. Gaussier

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 11/61
AI and Perception/Action
• Sensory motor level was considered as secondary
– Important debate in 1980/1990
• Animat approach (Meyer & Wilson 94)
– Situated cognition (opportunism -Brooks)
– Sensory-motor dynamics
– Motivation
– Autonomy– …
• Tendency to assign intentions to
others / artifacts
Do emotions really exist? Are they useful?
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 12/61
Decision making / Learning
in autonomous systems
• Reinforcement learning:
– Internal signals equivalent to pain and pleasure
– If delayed reward: TD(lambda), Qlearning…
• Action selection (Maes, Tyrell, Cañamero…)
• Other solutions: Use of cognitive maps(Arbib, Schmajuk, Edelman, Mallot, Gaussier…)
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 13/61
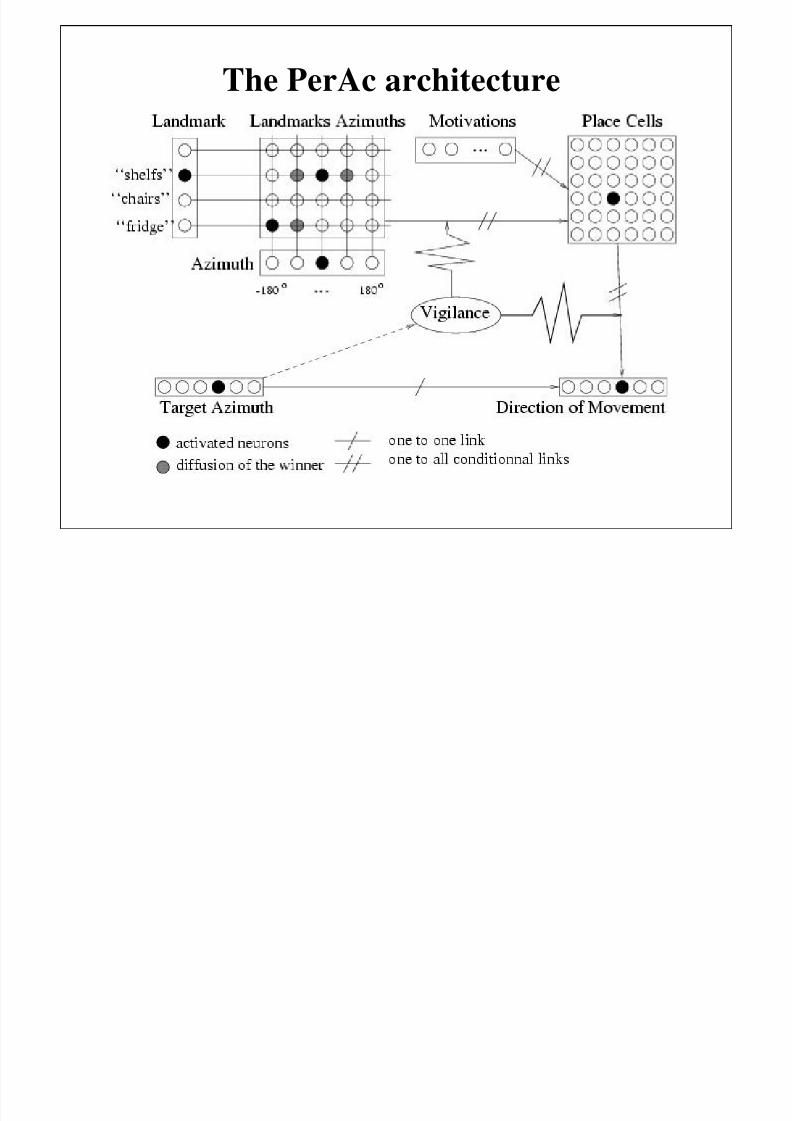
The PerAc architecture
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 14/61
30/03/2009 14
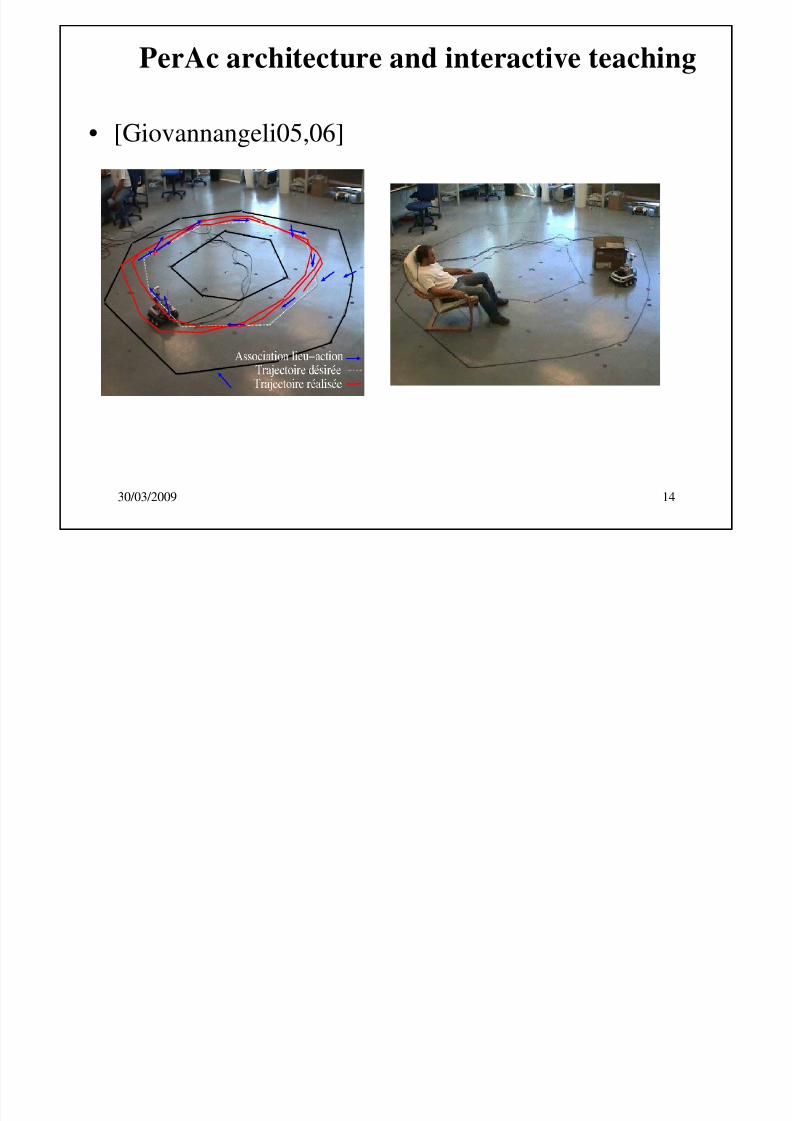
PerAc architecture and interactive teaching
• [Giovannangeli05,06]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 15/61
Motivational bias
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 16/61
2eme partie
Problèmes dans les interactions Homme-robot
Apprendre via imitation
Avoid combinatorial explosion of learning by an isolated individual
L’Interaction comme signal de renforcement
Exploit dynamics of interaction (communication)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 17/61
17
Avec un humain ? (STREP FEELIX growing)
• “two body psychology” : l’interaction est une dynamique
composée de deux systèmes, eux-mêmes dynamiques. Rôleimportant de l’imitation et des emotions.
Développement autonome
[IROS 07,
IEEE SMC 09]
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 18/61
Définitions de l’imitation…
• ``Vraie'' imitation: [Whiten&Byrne82, Mitchell87]
• Apprendre un nouveau comportement et reproduiteprécisément les actions permettant d’atteindre le but
de ce comportement.
• Imitation immediate vs différée
• imitation au niveau de l’action action vs au niveau duprogramme
• Autres types d’interactions:
• Stimulus enhancement [Spense37]• Emulation (obtenir la même recompense
[Tomassello87]
• Facilitation de la réponse [Byrne94]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 19/61
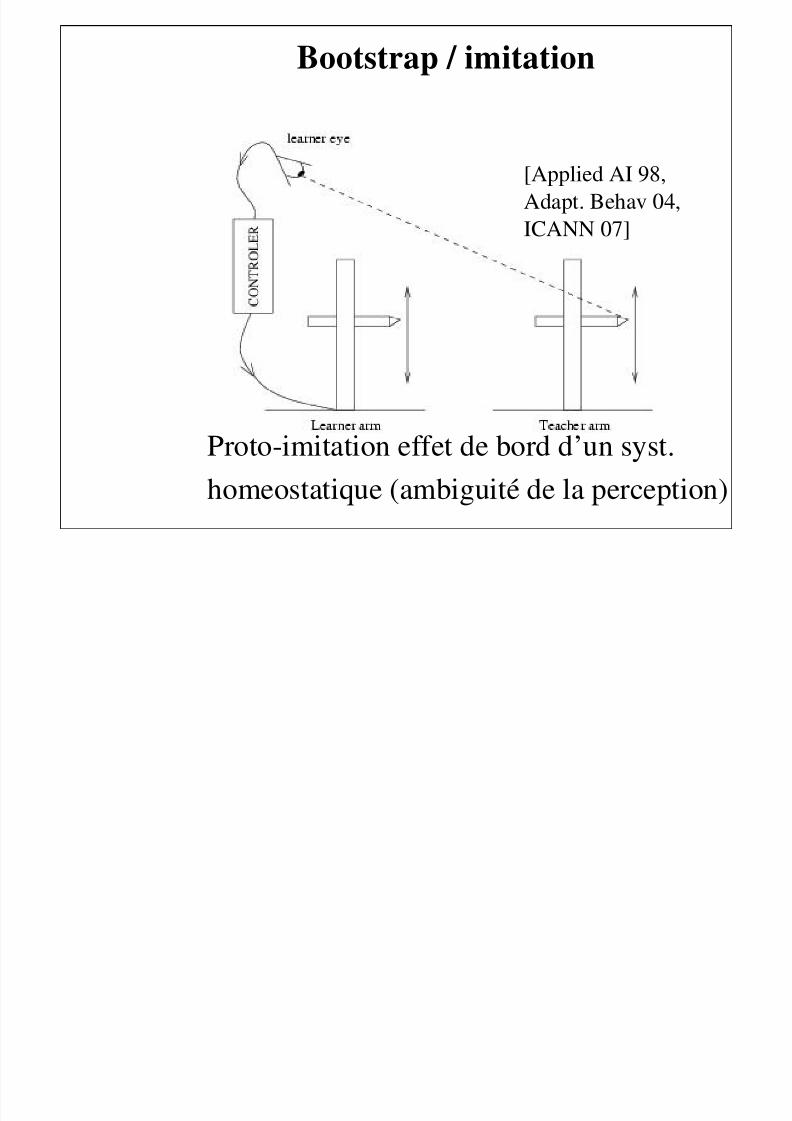
Bootstrap / imitation
Apprendre un comportement homéostatique
[Applied AI 98,
Adapt. Behav 04,ICANN 07]
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 20/61
Bootstrap / imitation
Proto-imitation effet de bord d’un syst.
homeostatique (ambiguité de la perception)
[Applied AI 98,
Adapt. Behav 04,ICANN 07]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 21/61
Setup expérimental
Simple homeostat + ambiguité de la perception
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 22/61
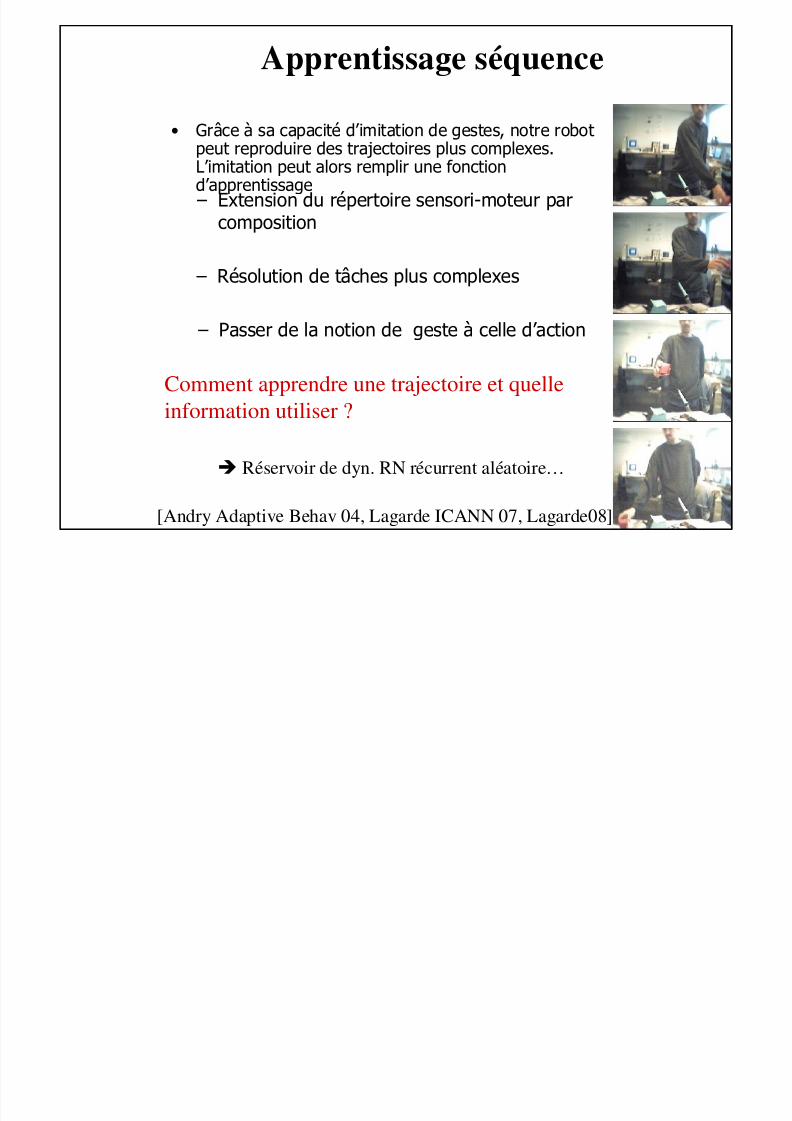
Apprentissage séquence
• Grâce à sa capacité d’imitation de gestes, notre robotpeut reproduire des trajectoires plus complexes.L’imitation peut alors remplir une fonctiond’apprentissage
– Extension du répertoire sensori-moteur parcomposition
– Résolution de tâches plus complexes
– Passer de la notion de geste à celle d’action
Comment apprendre une trajectoire et quelleinformation utiliser ?
Réservoir de dyn. RN récurrent aléatoire…
[Andry Adaptive Behav 04, Lagarde ICANN 07, Lagarde08]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 23/61
Imitation / interactions sociales
(J. Nadel et al 2004, Interactive Studies)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 24/61
Imitation / interactions sociales
(J. Nadel et al 2004, Interactive Studies)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 25/61
Imitation / interactions sociales
(J. Nadel et al 2004, Interactive Studies)
••Interaction et Imitation ne peuvent êtreInteraction et Imitation ne peuvent êtressééparparéées: prise en compte de capacites: prise en compte de capacitéés des de
tour de rôletour de rôle dansdans lele modmodèèlele::
••capacitcapacitéé àà sese synchronisersynchroniser
// ddéétectiontection de la synchroniede la synchronie
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 26/61
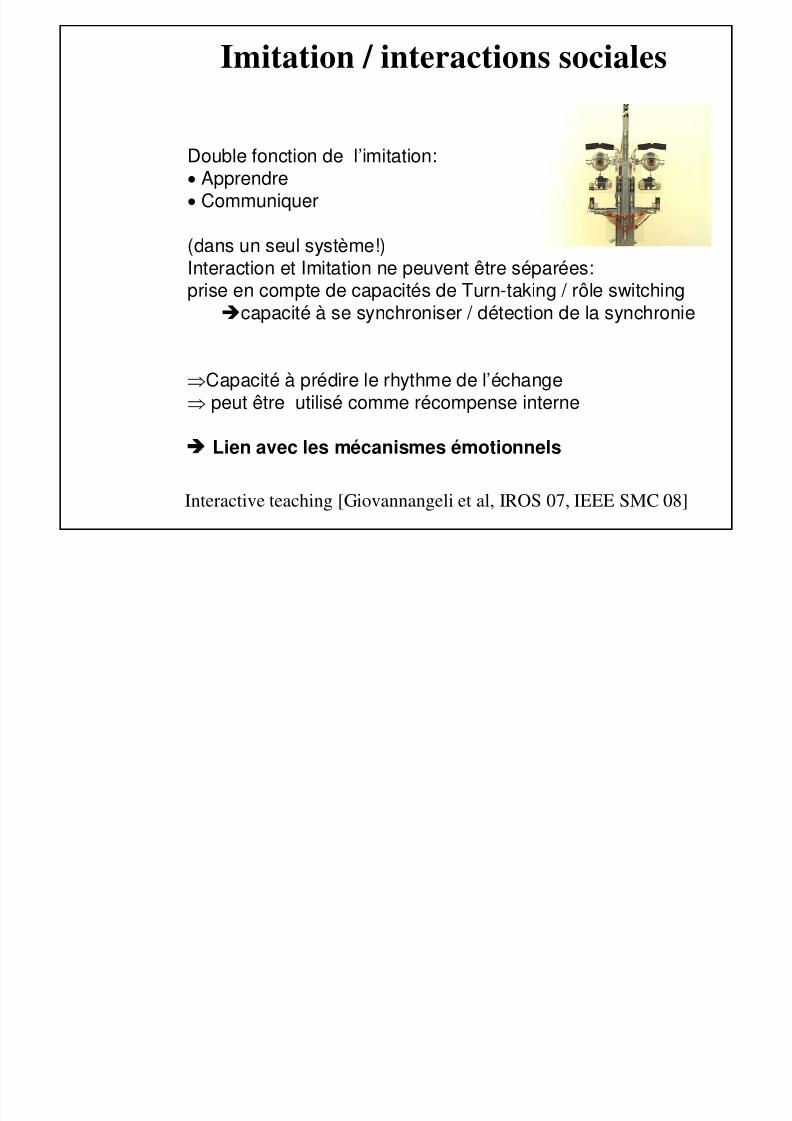
Double fonction de l’imitation:• Apprendre
• Communiquer
(dans un seul système!)Interaction et Imitation ne peuvent être séparées:
prise en compte de capacités de Turn-taking / rôle switchingcapacité à se synchroniser / détection de la synchronie
⇒Capacité à prédire le rhythme de l’échange⇒ peut être utilisé comme récompense interne
Lien avec les mécanismes émotionnels
Imitation / interactions sociales
Interactive teaching [Giovannangeli et al, IROS 07, IEEE SMC 08]
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 27/61
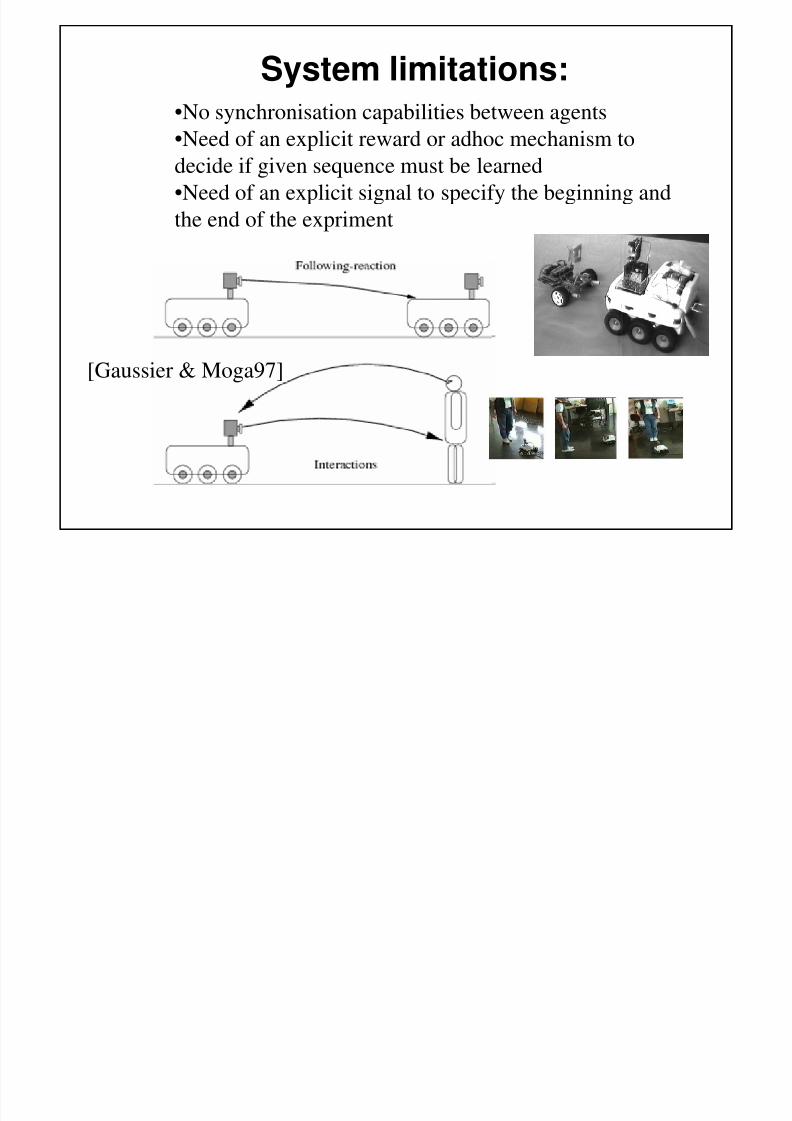
System limitations:•No synchronisation capabilities between agents
•Need of an explicit reward or adhoc mechanism to
decide if given sequence must be learned
•Need of an explicit signal to specify the beginning andthe end of the expriment
[Gaussier & Moga97]
Li i i d’ i l
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 28/61
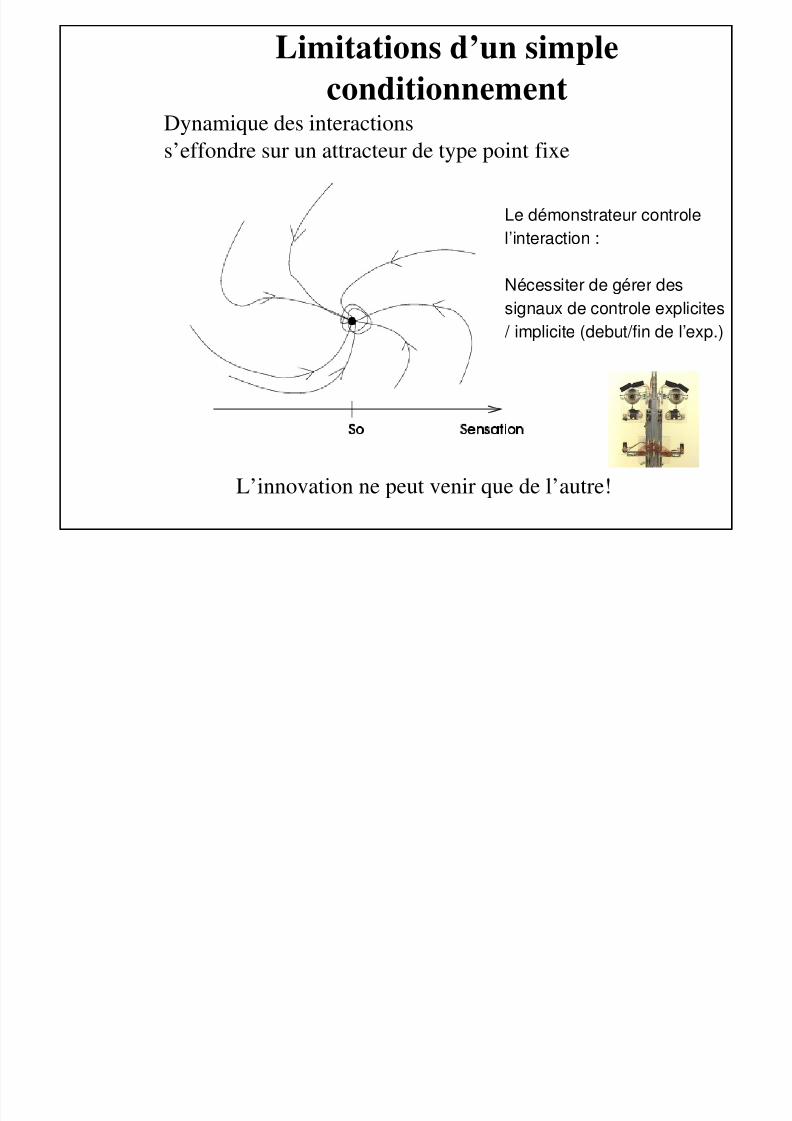
Limitations d’un simple
conditionnementDynamique des interactions
s’effondre sur un attracteur de type point fixe
L’innovation ne peut venir que de l’autre!
Le démonstrateur controle
l’interaction :
Nécessiter de gérer des
signaux de controle explicites
/ implicite (debut/fin de l’exp.)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 29/61
Résonances plus complexes
Besoin d’introduireAu moins des attracteurs cycliques:
“Volonté” d’interaction:
• un simple oscillateur interne?
• La prop. émergente d’un RN ?
Différent niveaux:
- turn taking
- role switching

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 30/61
Emotional value of interactions
Inspiration from mother-baby face to face interactions:
« still-face » [Tronick 78]:
•
Moving to still face• Negative effect on the children
double video [Threvarten 85, Nadel 99]:
• Mother and child communicate via a double video system
• Introduction of a temporal delay
• Contingency is essential to maintain the interaction
Rhythm and synchrony are important elements for the interaction
[Andry, Gaussier and Nadel 01]

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 31/61
Emotional value of interactions
Emotional resonance or contagion (bootstrap empathy)
Capability to predict the rhythm of the interaction(associated to a positive reward for ex.)
Imitation games (sharing emotions?)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 32/61
3eme partie
Modéliser les émotions?
Est ce que les robots ont besoin d’émotions?
(Designing emotional systems for more autonomous
and life-like behavior)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 33/61
30/03/2009 33
Why emotions interest roboticists ?
• [Giovannangeli05,06]
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 34/61
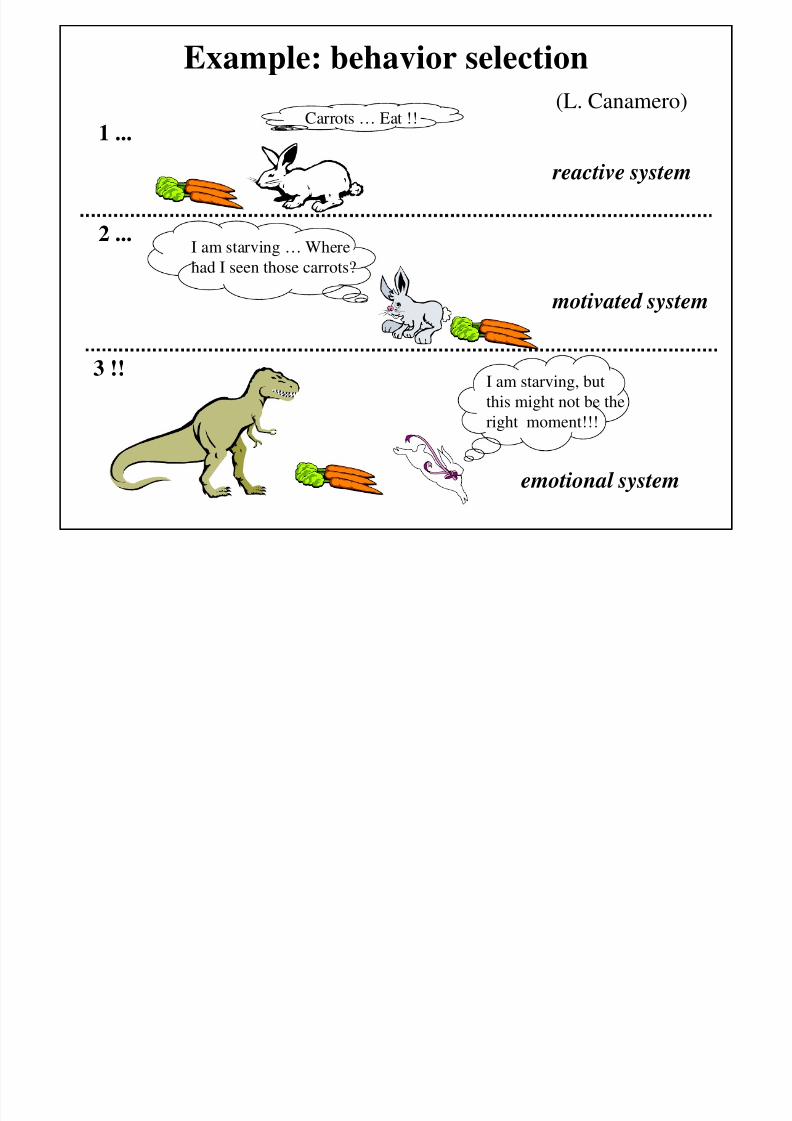
Example: behavior selection
1 ...Carrots … Eat !!
reactive system
2 ...I am starving … Where
had I seen those carrots?
motivated system
3 !!I am starving, but
this might not be theright moment!!!
emotional system
(L. Canamero)
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 35/61

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 36/61
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 37/61
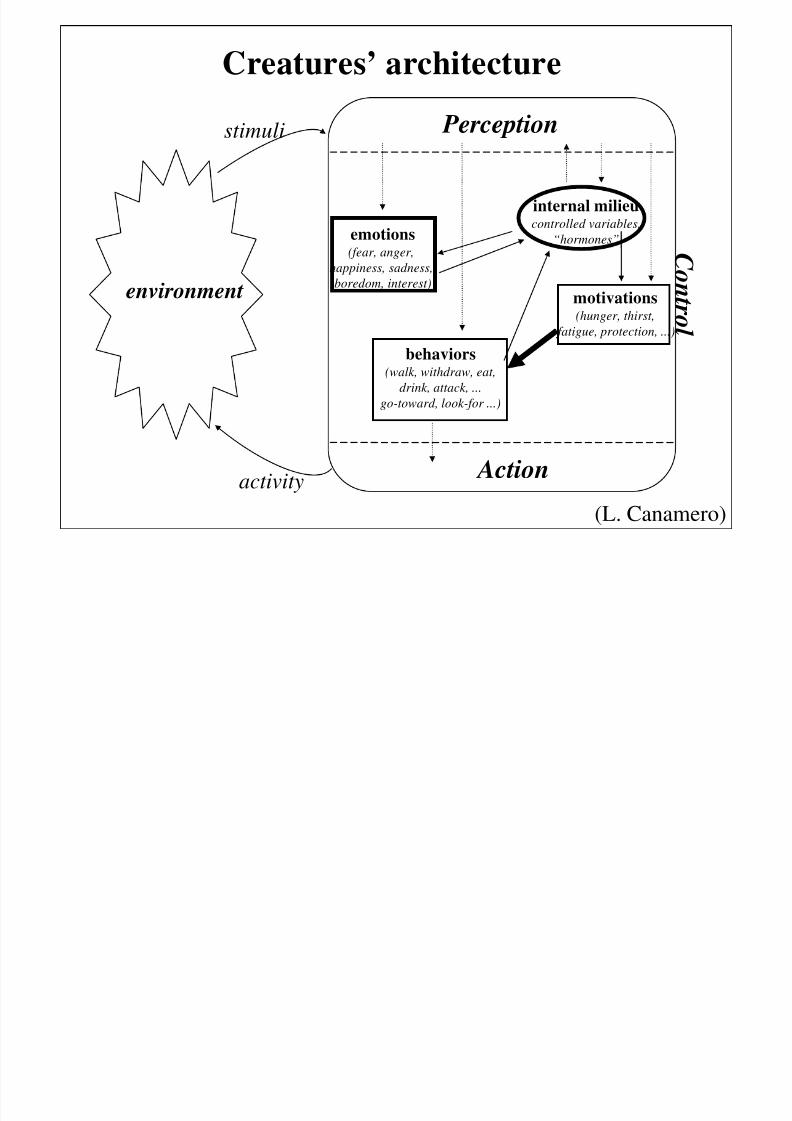
Creatures’ architecture
environment
Perception
Action
stimuli
activity
C o n t r o l
internal milieucontrolled variables,
“hormones”
motivations(hunger, thirst,
fatigue, protection, ...)
emotions(fear, anger,
happiness, sadness,
boredom, interest)
behaviors(walk, withdraw, eat,
drink, attack, ...
go-toward, look-for ...)
(L. Canamero)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 38/61
Is this enough to deal with others?
How to “display” emotional / “internal” states?
Design a morphology adapted to emotional and social interactions
What mechanisms are needed for this?
(L. Canamero)

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 39/61
4th part
Emotions in human-robot interactions
M d li ti

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 40/61
Modeling emotions
for social interactions
• Conveying intentionality
– Coherent explanation for observed behavior– Emotions and personalities as sources of intentions
• Eliciting/controlling emotions
• Making humans feel comfortable about theinteraction
– Tailor interactions to meet human needs
– Artifact more believable, “closer” to human (in autism?)
• Enhanced communication
– Non-verbal communication
– “deeper” understanding (what we mean, not what we say)
S k t l t d b t
8/9/2019 Gaussier j Autisme Info
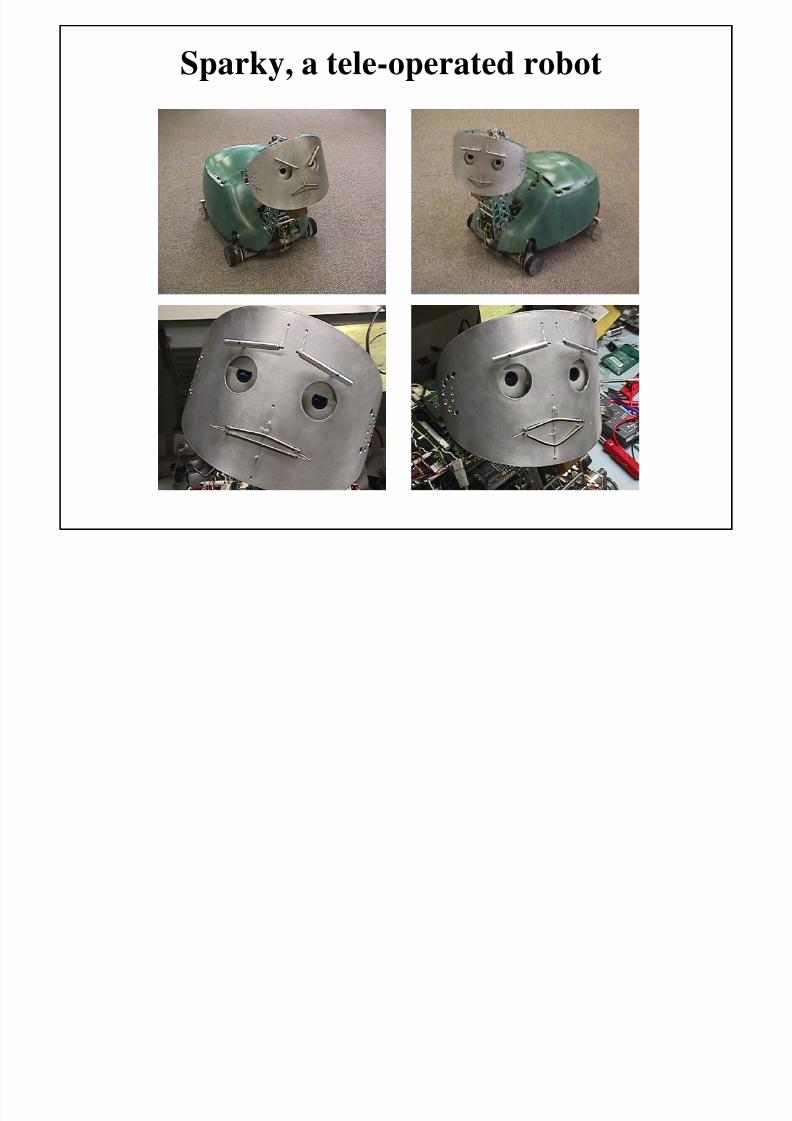
http://slidepdf.com/reader/full/gaussier-j-autisme-info 41/61
Sparky, a tele-operated robot
Ch i f d l di i ?
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 42/61
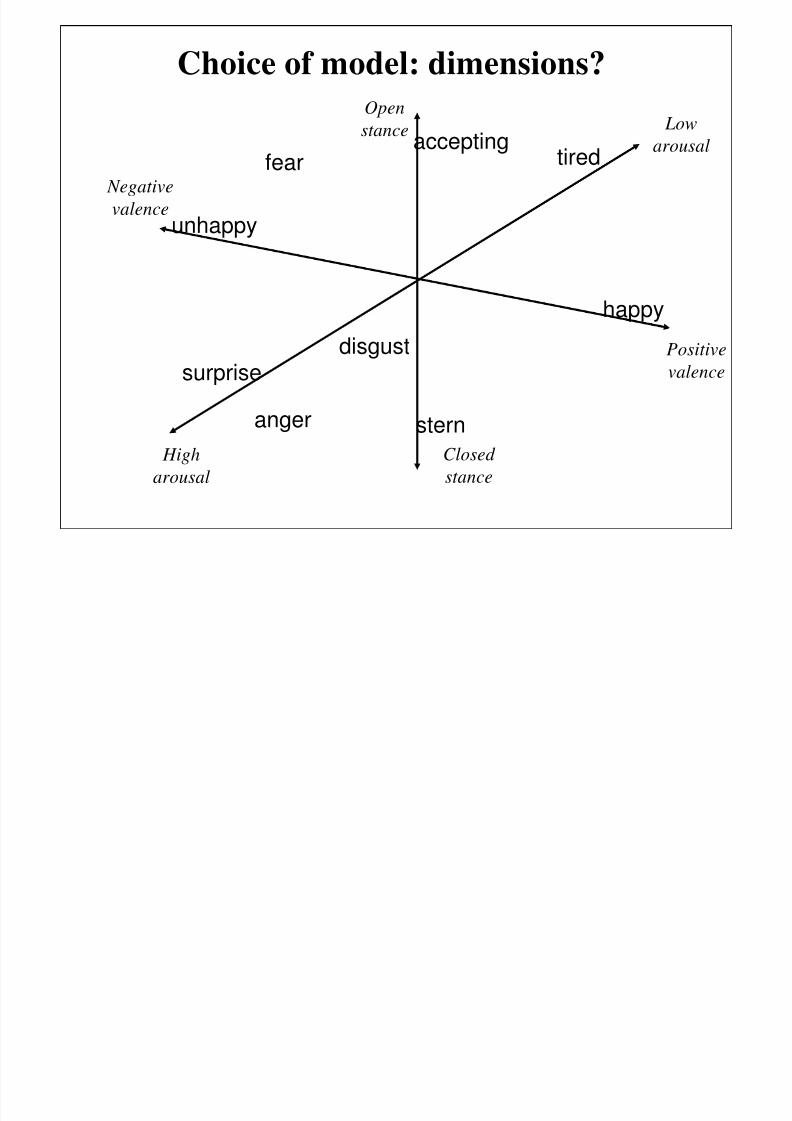
Choice of model: dimensions?
Negative
valence
Positive
valence
High
arousal
Low
arousal
Openstance
Closed
stance
unhappy
fear
anger
surprisedisgust
happy
tired
stern
accepting

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 43/61
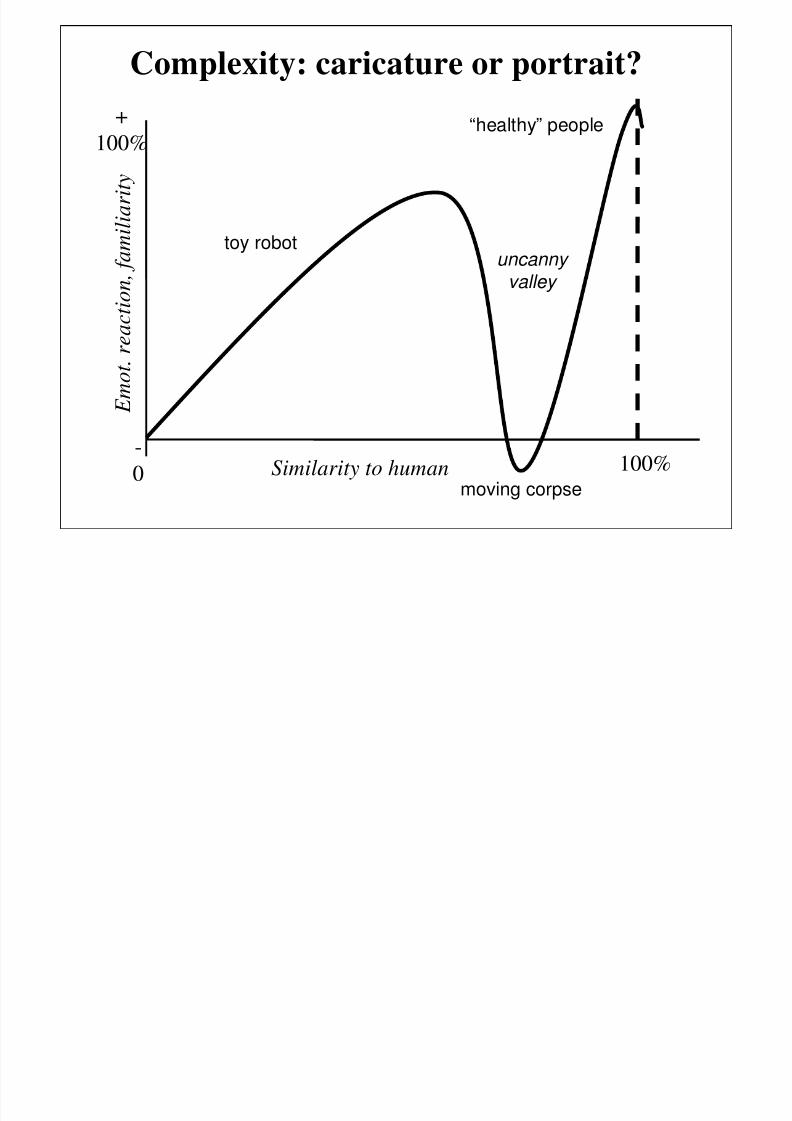
Complexity: caricature or portrait?
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 44/61
Complexity: caricature or portrait?
100%-
0
+
100%
Similarity to human
E m
o t . r e a c t i o
n ,
f a m i l i a r
i t y
toy robotuncanny
valley
“healthy” people
moving corpse
Feelix a simple “humanoid”

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 45/61
Feelix, a simple “humanoid”
(Lola Canamero )
D l t f f i l i iti

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 46/61
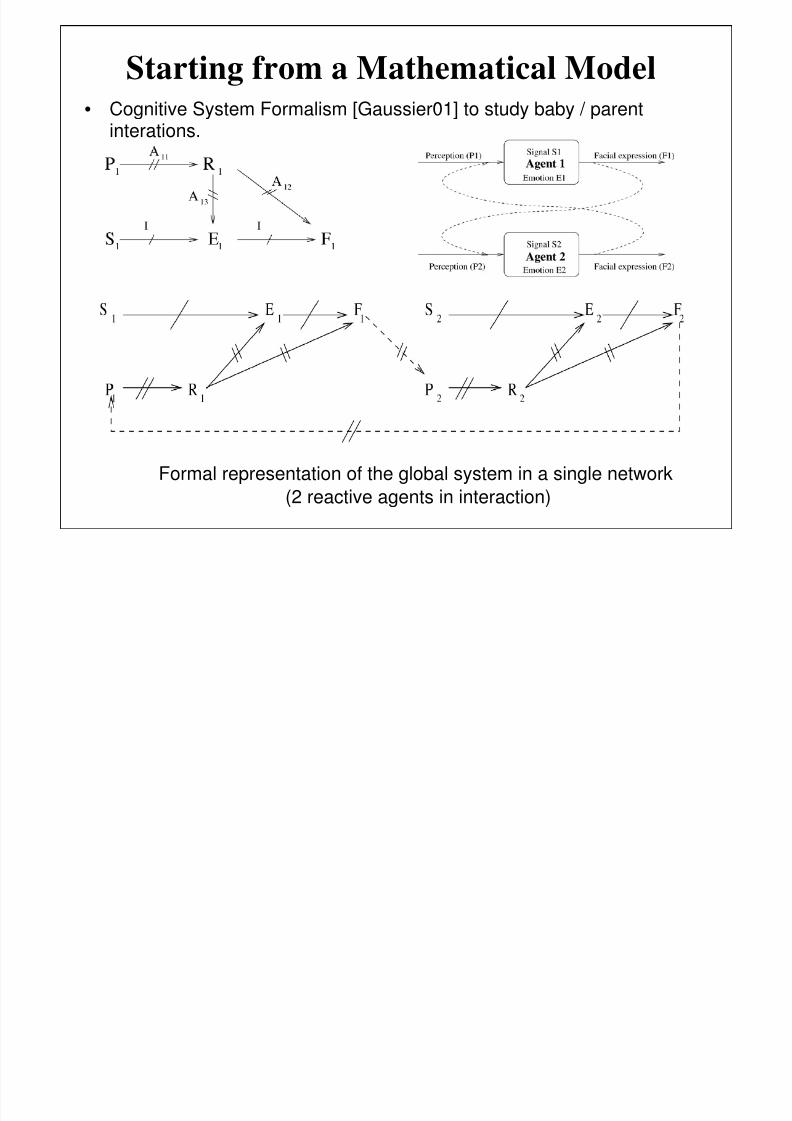
Development of facial expression recognition
GOAL: Understanding how babies learn to recognize facial expressions without having a teaching signalallowing to associate for instance an “happy face” with their own internal emotional state of happinessis a big challenge in a developmental perspective [Gergely99].
[Boucenna08]
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 47/61
we have shown

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 48/61
we have shown...
• After simplifications (in a stable state of interaction), the global
network is equivalent to a).
To allow learning
parents imitate / not the baby ! [Gaussier04]Importance of the empathy
Humans low level resonance to robot head [Nadel06]
First computational models
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 49/61
First computational models
Principle of the classical algorithms for facial
expression recognition:
Find the face in the image...
Build a frame around the face
Recognition of the normalized image (eigenvalues,
supervised NN...)
“Classical” NN strategies

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 50/61
“Classical” NN strategies
Limitation:
NO on-line and autonomous learning
because the face / non-face
recognition need an external
teaching signal (supervision)!
Approche fonctionnelle “classique”
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 51/61
vs approche developpementale holistique
Approche classique:
• Trouver le visage dans l’image…
• Construire un cadre autour du visage
Reconnaissance de l’imagette cadrée
(vecteurs propres, RN supervisés...)
Notre modèle développemental:
Reconnaissance des expressions peut précèder la
reconnaissance du visage !
Facial expression recognition

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 52/61
without face detection
• Idea: math. model does not suppose a first step of face
detection.
Success rate: happiness: 86 %, anger: 66 %, surprised: 51 %,
sadness: 48 %, neutral: 36 %
Interactions faciales

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 53/61
(SAB04, Epirob 06, 08)
Emotions as a way to structure

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 54/61
learning• Facial expression recognition can precede face / non
face recognition. !
• Taking into account the emotional development opens
new doors for autonomous learning
• The emotion communication may be used as a way toshape and trigger more and more complex learning
when no explicit reinforcement signal can be used.
Nouveaux outils pour les
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 55/61
p
sciences cognitives
Tester des modèles du cerveau
en conditions réelles !
Conclusion
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 56/61
Conclusion
Emergent double functions (self / social):
• Imitation: learning and communication
• Emotions: 2d order controller andcommunication
Need of an holistic approach to cognition :
• Robot as model to understand cognitive
mechanisms and their deficits
• Robot as tool for psychologists to test the validity
of the model
Besoin de plus de modèles

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 57/61
p
- Certains modèles amènent a des conclusions assez inattendues
- Les comportements observés peuvent résulter des interactions entreun grand nombre de dynamiques sensori-motrices
Difficulté à prédire l’impact d’une modification volontaire d’une
dynamique comportementaleForce heuristique du modèle robotique
Les robots peuvent être des outils intéressants pour valider des idées
thérapeutiques: gain de temps
Emotions as a dynamical system ?

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 58/61
y y
No locus
for the “emotional states”?
“appraisal”
--> Complex emotions built through the interaction
and next useful for an isolated agent
shared sub-structures
between both controllers
Perspectives
8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 59/61
•Questions ouvertes: types de codage, gestion de lamultimodalité (amodal versus re entrance entre cartesmodales)
•Vers des comportements complexes (manipulation,
interactions entre comportements de niveauxdifférents…)
•Modélisation des émotions (métacontrole / communication)
Expérience sur devel.
du référencement social
(donner une valeur aux objets)
Perspectives / RISQUES

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 60/61
•Comment maintenir des interactions avec un robot quine finissent pas en stéréotypies?
Besoin que le robot développe ses capacitésd’interaction avec l’enfant sinon danger!!!
Risque: mettre en avant les dispositifs robotiquespour pallier le manque de moyens humainsCE SERAIT CATASTROPHIQUE!
web site: www.etis.ensea.fr/~neurocyber/Videos/

8/9/2019 Gaussier j Autisme Info
http://slidepdf.com/reader/full/gaussier-j-autisme-info 61/61
Thanks to: P.Thanks to: P. AndryAndry, (J., (J.--C.C. BacconBaccon),),
J.P. Banquet, S.J.P. Banquet, S. BoucennaBoucenna, N., N. CuperlierCuperlier, F., F.
DemeloDemelo, L., L. HafemeisterHafemeister, (C., (C. GiovannangeliGiovannangeli),),
C.C. HassonHasson, J., J. HirelHirel, (C., (C. JoulainJoulain), M.), M. LagardeLagarde,,P.P. LaroqueLaroque, (S., (S. LeprêtreLeprêtre),),
B.B. MiramondMiramond, (S., (S. MogaMoga), (M.), (M. MaillardMaillard), F.), F. PirardPirard,,
(K.(K. PrepinPrepin), M.), M. QuoyQuoy, (A. Revel), (A. Revel)