Embed Size (px)
Citation preview


Gateway forMathematical Physics
{Knowledge for All !!}
Dr. Chitakudige RamachandraProfessor,
Department of Physics,Centre for Postgraduate Studies,
Jain University, Bengaluru - 560011.
ISO 9001:2008 CERTIFIED

© AuthorNo part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by anymeans, electronic, mechanical, photocopying, recording and/or otherwise without the prior written permission of thepublisher.
First Edition : 2016
Published by : Mrs. Meena Pandey for Himalaya Publishing House Pvt. Ltd.,“Ramdoot”, Dr. Bhalerao Marg, Girgaon, Mumbai - 400 004.Phone: 022-23860170/23863863, Fax: 022-23877178E-mail: [email protected]; Website: www.himpub.com
Branch Offices :
New Delhi : “Pooja Apartments”, 4-B, Murari Lal Street, Ansari Road, Darya Ganj,New Delhi - 110 002. Phone: 011-23270392/23278631; Fax: 011-23256286
Nagpur : Kundanlal Chandak Industrial Estate, Ghat Road, Nagpur - 440 018.Phone: 0712-2738731/3296733; Telefax: 0712-2721216
Bengaluru : Plot No. 91-33, 2nd Main Road, Seshadripuram, Behind Nataraja Theatre,Bengaluru - 560 020. Phone: 08041138821; Mobile: 9379847017, 9379847005
Hyderabad : No. 3-4-184, Lingampally, Besides Raghavendra Swamy Matham, Kachiguda,Hyderabad - 500 027. Phone: 040-27560041/27550139
Chennai : New-20, Old-59, Thirumalai Pillai Road, T. Nagar, Chennai - 600 017.Mobile: 9380460419
Pune : First Floor, “Laksha” Apartment, No. 527, Mehunpura, Shaniwarpeth(Near Prabhat Theatre), Pune - 411 030. Phone: 020-24496323/24496333;Mobile: 09370579333
Lucknow : House No. 731, Shekhupura Colony, Near B.D. Convent School, Aliganj,Lucknow - 226 022. Phone: 0522-4012353; Mobile: 09307501549
Ahmedabad : 114, “SHAIL”, 1st Floor, Opp. Madhu Sudan House, C.G. Road, Navrang Pura,Ahmedabad - 380 009. Phone: 079-26560126; Mobile: 09377088847
Ernakulam : 39/176 (New No.: 60/251), 1st Floor, Karikkamuri Road, Ernakulam,Kochi - 682 011. Phone: 0484-2378012, 2378016’ Mobile: 09387122121
Bhubaneswar : 5 Station Square, Bhubaneswar - 751 001 (Odisha).Phone: 0674-2532129; Mobile: 09338746007
Kolkata : 108/4, Beliaghata Main Road, Near ID Hospital, Opp. SBI Bank,Kolkata - 700 010, Phone: 033-32449649; Mobile: 7439040301
DTP by : Sunanda/Pravin
Printed at : M/s Sri Sai Art Printer Hyderabad. On behalf of HPH.
Preface
Dear Students, this book is written for those pursuing postgraduate studies inPhysics. While teaching this subject many times, I noticed couple of problems commonto many of the average students. I tried my best to address need of average studentspursuing postgraduate studies through this book.
Mathematical methods describe various analytical approaches for finding solutionto the given physical problem. However, it becomes equally important to appreciatephysical significance of mathematical solutions. Hence, importance is given to highlightphysical significance of mathematical solutions wherever applicable.
The book is written mainly for average (non-star) students. Hence, every importantstep of derivation or solution is included.
Some of the model questions and answers provided at the end of each chapter willhelp the students on how to address typical questions in the examination.
Integration by parts and partial fraction method are reviewed in Annexure A and Bas they are frequently used in many chapters.
There are certain variations in the syllabus of the subject from one university toother across India. The text book is designed to cover more than 90% of the syllabus foruniversities in India.
Feedback from students/faculty members are highly appreciated.
Dr. Chitakudige RamachandraE-mail: [email protected]

Physical Significance of Mathematical Solution
Phenomena Observation RemarksA person is climbing the hill.(in t domain)
But it appears that he is rolling offdown the hill. (in f domain)
Study Laplacetransformation
Thin metallic wire is heated to 1000degree C and then both ends aretouched to ice.
There are cold points on the wire whereone can touch without getting burnt. (•)
Study PartialDifferentialEquations
Red light beam is passed through acrystal.
On the other side blue light is alsoseen.
Study tensor
Thin circular metal plate is heated atperiphery uniformly.
Heat starts flowing from periphery tocentre of the plate. Estimatetemperature at center of the plate.
Study Besselfunction
•. Reality is different from ideal situation. Hence, kindly do not try performing these experiments withoutsafety precautions.
H
t
H
f
Contents
Sr. No. Title Page No.
Chapter 1 Coordinate System 1 – 101.1 Curvilinear Coordinate System1.2 Cartesian Coordinate System1.3 Cylindrical Coordinate System1.4 Spherical Coordinate System
Chapter 2 Vector Integration 11 – 182.1 Line Integral of Vector Function2.2 Surface Integration of a Vector Function2.3 Volume Integral of Vector Function
Chapter 3 Vector Integral Theorems 19 – 353.1 Vector Differential Operator3.2 Divergence of a Vector Field3.3 Curl of a Vector Field (F)3.4 Gauss Divergence Theorem3.5 Stoke’s Theorem
Chapter 4 Matrices 36 – 584.1 Matrix: Definition4.2 Linear Transformation4.3 Eigen Values and Eigen Vectors
Chapter 5 Tensors 59 – 785.1 Introduction5.2 Contra Variant Tensor5.3 Covariant Tensor5.4 Symmetry of the Tensor5.5 Tensor Algebra5.6 Metric Tensor5.7 Levi Civita and Krocker Delta Tensor5.8 Tensor Examples
Chapter 6 Power Series Methods 79 – 936.1 Power Series Method6.2 Frobenius Method
Chapter 7 Beta and Gamma Functions 94 – 1017.1 Gamma Function7.2 Beta Function
Chapter 8 Special Functions 102 – 1268.1 Legendre Equation and Polynomials8.2 Bessel Functions8.3 Hermite Differential Equation8.4 Laguerre Differential Equation8.5 Dirac Delta Function
Chapter 9 Function of Complex Variable 127 – 1759.1 Complex Numbers (Cartesian and Polar Form)9.2 Hidden Roots of a Real Number9.3 Function of a Complex Variable9.4 Cauchy-Riemann Condition for f(z) to be Analytic9.5 Cauchy Integral Theorem9.6 Cauchy Integral Formula9.7 Taylor and Laurent Series9.8 Cauchy Residue Theorem
Chapter 10 Fourier Series 176 – 19110.1 Fourier Series10.2 Fourier Coefficients10.3 Complex form of Fourier Series10.4 Parseval Identity/Theorem
Chapter 11 Laplace Transformation 192 – 21611.1 Laplace Transformation (Definition)11.2 Inverse Laplace Transformations: Partial Fraction Method11.3 Laplace Transformation of Derivative of a Function11.4 s-Shift Theorem and t-Shift Theorem11.5 Laplace Transform of a Periodic Function11.6 Solution of Differential Equations11.7 Convolution Theorem
Chapter 12 Fourier Transformation 217 – 21912.1 Definition12.2 Properties
Chapter 13 Partial Differential Equation 220 – 24713.1 Partial Differential Equation (P.D.E.)13.3 Direct Integration Method13.3 Method of Separation of Variable13.4 One-dimensional Heat Equation13.5 Two-dimensional Laplace Equation13.6 One-dimensional Wave Equation
Chapter 14 Sturm Lioville Equation 248 – 25314.1 Sturm-Liouville Equation14.2 Eigen Values and Eigen Function of Sturm-Liouville
EquationChapter 15 Green Function 254 – 277
15.1 Green Function and Its Properties15.2 Construction of Green Function using Boundary Values15.3 Construction of Green Function using Eigen FunctionsAnnexure A: Integration by Parts 278 – 279Annexure B: Partial Fraction 280 – 282Annexure C: Question Bank 283 – 290
Ch
apte
r
1 Coordinate System
Key Points Representation of point in three dimension Base vectors Jacobian Orthogonal coordinate systems Cartesian, Cylindrical and Spherical coordinate systems Surface element and volume element
1.1 CURVILINEAR COORDINATE SYSTEM
Consider a point P in a two dimensional space. It can be described by coordinates x and y. For agiven set of coordinates (x, y), there exist one and only one point in two dimensional space. (Figure 1.1)
Y
y
O x X
P (x, y)P
Figure 1.1
However x and y are not the only means of describing the point P.
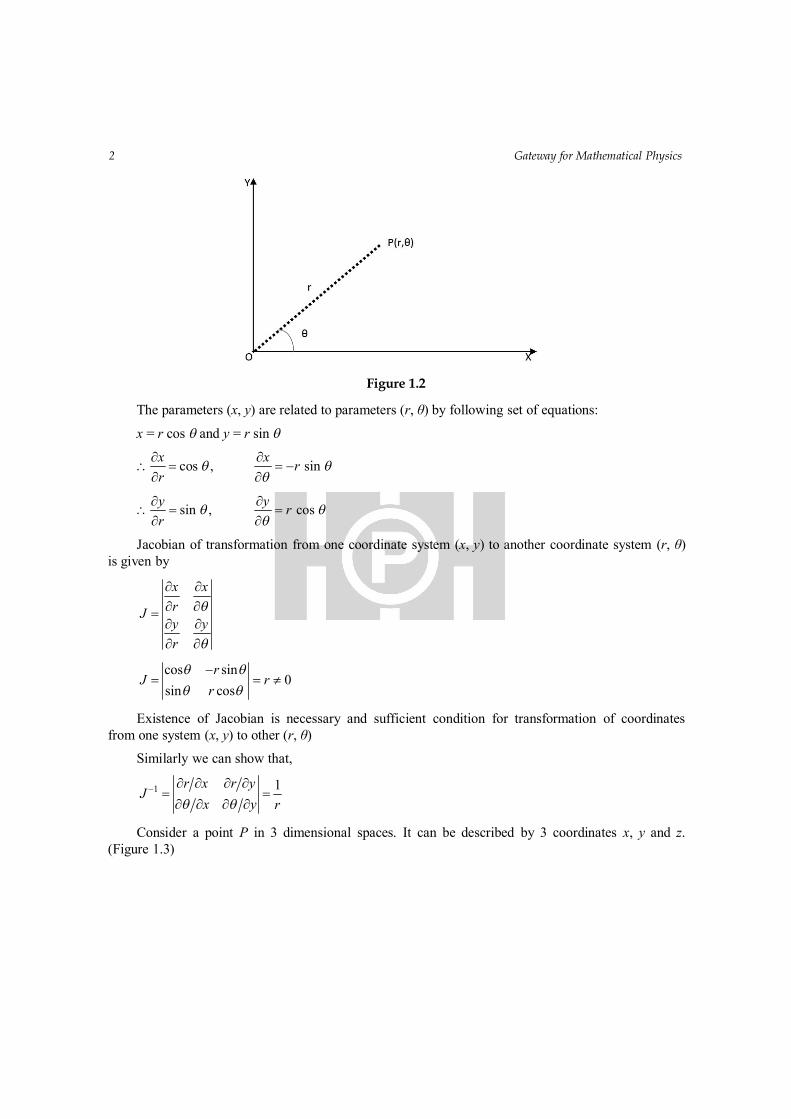
It can be defined by other set of coordinates such as r and . (Figure 1.2)
2 Gateway for Mathematical Physics
Figure 1.2
The parameters (x, y) are related to parameters (r, θ) by following set of equations:
x = r cos and y = r sin
cos ,xr
sinx r
sin ,yr
cosy r
Jacobian of transformation from one coordinate system (x, y) to another coordinate system (r, θ)is given by
x xrJy yr
cos sin0
sin cosr
J rr
Existence of Jacobian is necessary and sufficient condition for transformation of coordinatesfrom one system (x, y) to other (r, θ)
Similarly we can show that,
1 1r x r yJ
x y r
Consider a point P in 3 dimensional spaces. It can be described by 3 coordinates x, y and z.(Figure 1.3)
3Coordinate System
z
y
x
(4, 5, 5)(x, y, z)
Figure 1.3
Two different points (say P and Q) must have different coordinates. (Figure 1.4)
P(1, 2, 3)
y
z
x
(2, –2, 1)Q
Figure 1.4
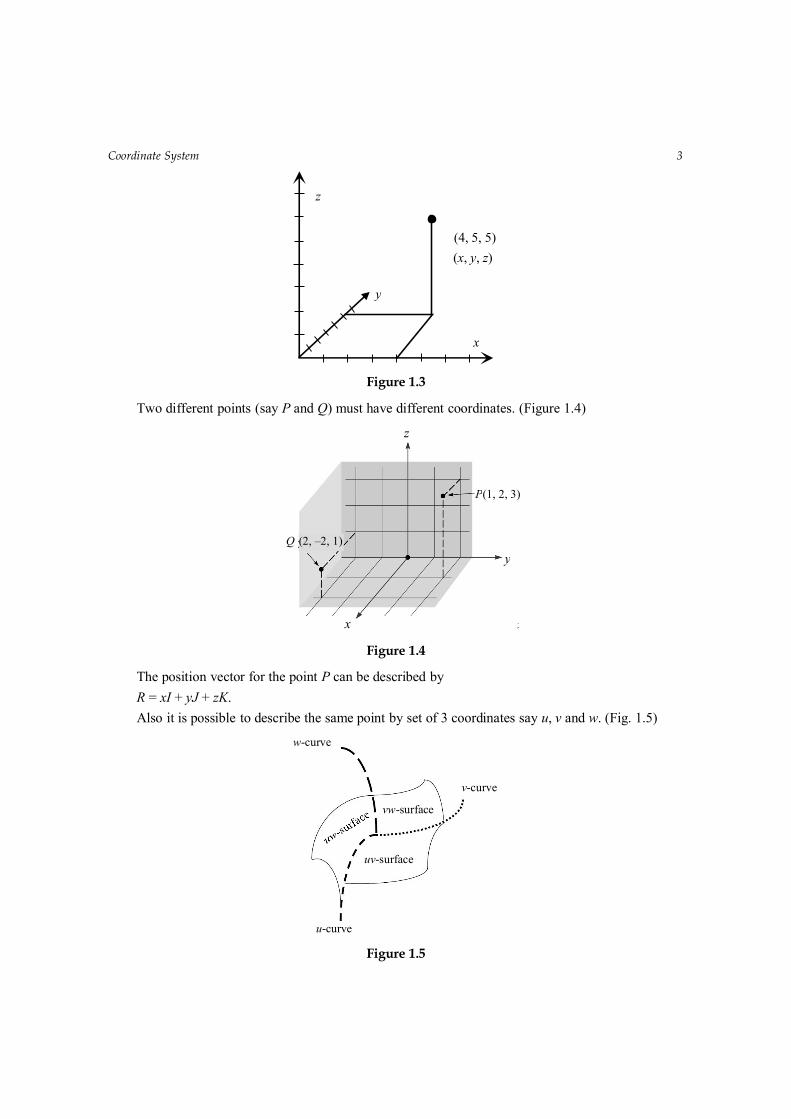
The position vector for the point P can be described byR = xI + yJ + zK.Also it is possible to describe the same point by set of 3 coordinates say u, v and w. (Fig. 1.5)
w-curve
vw-surface
uv-surface
u-curve
v-curve
Figure 1.5

4 Gateway for Mathematical Physics
When v and w are held constant, the point p traces trajectory along u-curve.
When u and w are held constant, the point p traces trajectory along v-curve.
When u and v are held constant, the point p traces trajectory along w-curve.
These coordinate curves can be lines or curves, hence the name curvilinear coordinate system.(Figure 1.5)
Ru
is tangent vector along u-curve at P.
Rv
is tangent vector along v-curve at P
Rw
is tangent vector along w-curve at P.
We have, position vector,
R = xI + yJ + zK
( )
R x y zxI yJ zK I J Ku u u u u
( )
R x y zxI yJ zK I J Kv v v v v
( )
R x y zxI yJ zK I J Kw w w w w
Jacobian,
x y zu u ux y zJv v vx y zw w w
This can be expressed as scalar triple product of three base vectors.
.R R RJu v w The three base vectors are non coplanar if J 0. Then any point in the three
dimensional space can be expressed as linear combination of these three base vectors.
Therefore J 0 is necessary and sufficient condition for transformation of coordinates from(x, y, z) to (u, v, w).
We define scale factors
1 ,Rhu 2 ,
Rhv 3
Rhw

5Coordinate System
The unit base vectors are
1
1 ,
uRE
h u 2
1 ,
vRE
h vand
3
1
wRE
h w
1.2 CARTESIAN COORDINATE SYSTEM
Point P is uniquely described by three coordinates x, y and z.
(Figure 1.6)
p
x
x
y
z
z
y
Figure 1.6
Here, u = x, v = y and w = z.
We have, R = xI + yJ + zK
R R Iu x
1 1Rhx
R R Jv y
2 1 Rhy
R R Kw z
3 1
Rhz
Base vectors are,
1
1
xRE I
h x

6 Gateway for Mathematical Physics
2
1
yRE J
h y
3
1
zRE K
h z
Also,0 x yE E I J
0 y zE E J K
0 z xE E K I
Ex, Ey and Ez are orthogonal to each other.
Similarly we can see
Ex × Ey = Ez, Ey × Ez = Ex, Ez × Ex = Ey
Cartesian coordinates system is a right handed orthogonal coordinate system.
Volume element dV = h1 h2 h3 du dv dwdV = 1.1.1.dx dy dz
dV = dx dy dz Useful to evaluate volume integral over a cubical/rectangular parallelepiped region
Surface elements are:
dsx = h2 h3 dv dw = dy dz : Surface for which x is constant
dsy = h1 h3 du dw = dx dz : Surface for which y is constantdsz = h1 h2 du dv = dx dy : Surface for which z is constant
Useful to evaluate surface integrals over coordinate planes.
1.3 CYLINDRICAL COORDINATE SYSTEM
Point in 3 dimensional spaces is described by three parameters r, and z.
u = r, v = and w = zCylindrical coordinates for a point P is depicted in Figures 1.7 and 1.8
Figure 1.7 Figure 1.8

7Coordinate System
x = r cos ; y = r sin ; z = zWe have,
R = xI + yJ + zK
R = r cos I + r sin J + zK
R Ru r
= cos I + sin J
122 2
1 cos sin 1Rhr
R Rv
= – r sin I + r cos J
122 2 2 2
2 sin cosRh r r r
R R kw z
3 1Rhz
Base vectors are,
1
1 cos sinrRE I J
h r
2
1 sin cosRE I Jh
Ez = kConsider,
(cos sin ) ( sin cos )rE E I J I J
= – sin cos + sin cos = 0
( sin cos ) 0zE E I J K
(cos sin ) 0r zE E I J K
Er, E and Ez are orthogonal to each other.
Similarly we can see
Er × E = Ez, E × Ez = Er, Ez × Er = E
Cylindrical coordinates system is right handed orthogonal curvilinear coordinate system.
Volume element dV = h1 h2 h3 du dv dw
dV = 1.r.1.dr d dz

8 Gateway for Mathematical Physics
dV = r dr d dz Useful to evaluate volume integral over a cylindrical region
Surface elements are:
dSr = h2 h3 dv dw = r d dz : Surface for which r is constant
dS = h1 h3 du dw = dr dz : Surface for which is constant
dSz = h1 h2 du dv = r dr d : Surface for which z is constant
Useful to evaluate surface integrals over coordinate surfaces.
1.4 SPHERICAL COORDINATE SYSTEM
Point P is uniquely described by three coordinates r, and (See Figure 1.9 and 1.10)
u = r , v = and w =
The relation between Cartesian coordinates (x, y, z) and spherical coordinates (r, , ) is shownin the figure 1.9
Figure 1.9 Figure 1.10 Figure 1.11
Point P is uniquely described by (r, , ) as shown in the Figure 1.11
x = r sin cos , y = r sin sin , z = r cos
We have,
R = xI + yJ + zK
R = r sin cos I + r sin sin J + r cos K
sin cos sin sin cosR R I J Ku r
1
2 2 2 2 2 21 sin cos sin sin cos 1Rh
r
cos cos cos sin sinR R r I r J r Kv
1
2 2 2 2 2 2 2 2 22 cos cos cos sin sinRh r r r r

9Coordinate System
sin sin sin cosR R r I r Jw
1
2 2 2 2 2 2 23 sin sin sin cos sinRh r r r
Base vectors are,
Er = sin cos I + sin sin J + cos K
E = cos cos I + cos sin J – sin K
E = – sin I + cos JIt is easy to verify followings: (Kindly check it yourself)
0rE E
0E E
0rE E
Er, E and E are orthogonal to each other.
Similarly it can be verified that
Er × E = E, E × E = Er, E × Er = E
Spherical coordinates system is right handed orthogonal curvilinear coordinate system.
Volume element dV = h1 h2 h3 du dv dw
dV = r2 sin dr d d
Useful to evaluate volume integral over spherical region.Surface elements are:
dSr = h2 h3 dv dw = r2 sin d d : Surface element for which r is constant
dS = h1 h3 du dw = r sin dr d : Surface element for which is constant
dS = h1 h2 du dv = r dr d : Surface element for which is constant
Summary Given a physical problem, identify symmetry of the region. Accordingly choose appropriate
coordinate system. Kindly take note of surface and volume elements in different coordinate system. When you do not know where you are, you cannot predict where others are.
Model Question and AnswerQ1. A point P in spherical coordinate system is described by P(3, /2, and ). Determine its
coordinates in Cartesian and cylindrical coordinate systems:Ans.: In spherical coordinate system, point in 3 dimension is described by three parameters
namely r, and .

10 Gateway for Mathematical Physics
Given r = 3, =2 and =
We have x = r sin cos; y = r sin sin , and z = r cos
x = 3 sin2
cos = – 3
y = 3 sin2
sin = 0
z = 3 cos2 = 0
P = P (–3, 0, 0)In Cartesian coordinate system, x = –3, y = 0 and z = 0.In cylindrical coordinate system, the same point P is described three variables r, and z.
1
22 2r x y = 3.
tan = 0 .3
yx
=
z = z = 0.Therefore in cylindrical coordinate system, the point P can be described asP (–3, , 0)
![Mathematical methods for theoretical physics · Mathematical methods for theoretical physics Level: General ... 1999). [2] B. O’Neill, Semi ... Mathematical Topics Between Classical](https://img.pdfslide.us/doc/110x75/5ad62b0e7f8b9aff228df397/mathematical-methods-for-theoretical-methods-for-theoretical-physics-level-general.jpg)







![[Butkov, E.] Mathematical Physics](https://img.pdfslide.us/doc/110x75/577c80861a28abe054a910b0/butkov-e-mathematical-physics.jpg)




















