Embed Size (px)
Citation preview
g(x)v(x) − 1
π
∫ 1
−1
v′(t)
t − xdt +
1
π
∫ 1
−1h(x, t)v(t)dt = f(x), (1)
v(−1) = v(1) = 0. (2)
For a function v ∈ Lp(−1, 1) possessing a generalized derivativev′ ∈ Lp(−1, 1),we have
d
dx
∫ 1
−1
v(t)
t − xdt =
∫ 1
−1
v′(t)
t − xdt − v(−1)
1 + x+
v(1)
1 − x, x ∈ (−1, 1),
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 1
Eq. (1) together with (2) can be written in the form
g(x)v(x)−1
π
∫ 1
−1
v(t)
(t − x)2dt+
1
π
∫ 1
−1h(x, t)v(t)dt = f(x), −1 < x < 1
(3)where the hypersingular integral operator has to be understood in the senseof ∫ 1
−1
v(t)
(t − x)2dt =
d
dx
∫ 1
−1
v(t)
t − xdt (4)
Recall that for physical reason we look for a solution in the form
v(x) = ϕ(x)u(x), ϕ(x) =√
1 − x2 (5)
g(x)ϕ(x)u(x)−1
π
∫ 1
−1
ϕ(x)u(x)
(t − x)2dt+
1
π
∫ 1
−1h(x, t)ϕ(x)u(x)dt = f(x),
(6)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 2
where the hypersingular integral operator has to be understood in the senseof ∫ 1
−1
ϕ(x)u(x)
(t − x)2dt =
d
dx
∫ 1
−1
ϕ(x)u(x)
t − xdt (7)
Multiplication Operator
Γ(x) = g(x)ϕ(x), (MΓ)u(x) = Γ(x)u(x) (8)
Cauchy Singular Integral Operator
(Su)(x) = −1
π
∫ 1
−1
u(t)
t − xϕ(t)dt (9)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 3
Hypersingular Integral Operator
V = DS, D =d
dx, (10)
Kernel Integral Operator
(Hu)(x) =1
π
∫ 1
−1h(x, t)u(t)ϕ(t)dt, (11)
(MΓ + V + H)u = f (12)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 4
ICollocation method
Letvγ,δ(x) = (1 − x)γ(1 + x)δ, γ, δ > −1
be a Jacobi weight and let pγ,δn refer as the normalized Jacobi polynomial
(with positive leading coefficient) of degree n with respect to the Jacobi
weight vγ,δ. Moreover, let xγ,δnk with −1 < xγ,δ
nn < . . . < xγ,δn1 < 1 be
the zeros of pγ,δn and denote by Lγ,δ
n the Lagrange interpolation operator
Lγ,δn f =
n∑
k=1
f(xγ,δnk )lγ,δ
nk , lγ,δnk (x) =
n∏
j=1,j 6=k
x − xγ,δnj
xγ,δnk − xγ,δ
nj
.
Since we look for a solution of our hypersingular integral equation of theform u(x)ϕ(x) = u(x)
√1 − x2, this suggest us to choose γ = δ = 1
2,then pϕ
n is the n-th orthonormal Tchebychev polynomial of the second kind
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 5
pϕn =
√2Un where Un(x) = sin[(n+1)ξ]
sin ξand the zeros have the following
expressions
xϕnk = cos
kπ
n + 1, k = 1, . . . , n .
The collocation method consists looking for an approximate solutionun ∈ Pn−1 of equation (12) and solving the linear system
[(MΓ + V + H)un](xϕnk) = f(xϕ
nk) , k = 1, ..., n,
or (that is the same) to solve the equation
Lϕn(MΓ + V + H)un = Lϕ
nf .
Now, we remember that for each s ≥ 0, the hypersingular integral operator
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 6
V = DS ∈ L(L2,s+1ϕ , L2,s
ϕ ) is a continuous isomorphism and
V u = DSu =∞∑
n=0
(n + 1)〈u, pϕn〉ϕpϕ
n. (13)
By this, we deduce that the operator V transforms polynomials intopolynomials i.e.
LϕnV un = V un
Then, the previous equation is equivalent to
[V + Lϕn(MΓ + H)]un = Lϕ
nf. (14)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 7
Theorem 1. Assume that
• s > 1/2;
• f ∈ L2,sϕ ;
• For f ≡ 0 equation (12) has only the trivial solution u ≡ 0 in L2,1ϕ ;
• Γ ∈ Crϕ for some integer r, 0 ≤ s ≤ r;
• h(., t) ∈ L2,sϕ uniformly w.r.t. t ∈ [−1, 1].
Then, for all sufficiently large n, the approximate equation (14) is uniquelysolvable, and the solution u∗
n converges to the unique solution u∗ of
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 8
hypersingular integral equation (12) in the norm of L2,s+1ϕ . Moreover, for
0 ≤ t ≤ s,
||u∗n − u∗||ϕ,t+1 ≤ const nt−s||u∗||ϕ,s+1.
I Quadrature method (discrete collocation method)
We consider the operator H and we approximate this with the followinggaussian quadrature rule with respect to the variable t
(Hu)(x) =1
π
∫ 1
−1h(x, t)u(t)ϕ(t) dt ≈
≈ (Hnu)(x) =n∑
k=1
λϕnkh(x, xϕ
nk)u(xϕnk),
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 9
where
xϕnk = cos
kπ
n + 1,
λϕnk =
1 − (xϕnk)
2
n + 1=
1
n + 1sin2 kπ
n + 1, k = 1, . . . , n .
The quadrature or discrete collocation method consists in solving theequation
V + Lϕn(MΓ + Hn)un = Lϕ
nf.
The solution of this equation again belongs to Pn−1 . Since, for such un ,we have
(Hnun)(x) =n∑
k=1
λϕnkh(x, xϕ
nk)un(xϕnk)
=1
π
∫ 1
−1un(t)Lϕ
nt[h(x, t)]ϕ(t) dt =: (Hnun)(x) , (15)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 10
the approximate equation is equivalent to
V + Lϕn(MΓ + Hn)un = Lϕ
nf .
The following Lemma is crucial for proving the convergence of both thediscrete collocation method and the fast algorithm we now present.
Lemma 1. Assume h(x, .) ∈ L2,sϕ for some s > 1/2 uniformly w.r.t.
x ∈ [−1, 1] . Then, for 0 ≤ t ≤ s and u ∈ L2ϕ ,
||Lγ,δm (Hn − H)u||γ,δ,t ≤ constmtn−s||u||ϕ .
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 11
IA Fast Algorithm
Now we show as we can construct a fast algorithm to solve numerically thesimple hypersingular integral equation
γ0u(x) − 1
π
∫ 1
−1
u(t)
(t − x)2ϕ(t)dt +
1
π
∫ 1
−1h(x, t)u(t)ϕ(t) dt = f(x),
or in the operator form
Mγ0 + V + H = f. (16)
This technique can be used also for the more general equation
γ0u(x) − 1
π
∫ 1
−1
u(t)
(t − x)2ϕ(t)dt+
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 12
+1
π
∫ 1
−1
[h(x, t) − γ1 ln |x − t|]u(t)ϕ(t) dt = f(x).
We approximate the operator Mγ0 + V + H by using the quadraturemethod.
(Mγ0 + V + LϕnHn)un = Lϕ
nf,
where we recall that
(Hnu)(x) :=1
π
∫ 1
−1u(t)Lϕ
nt[h(x, t)]ϕ(t) dt
We again remark that each solution un belongs to Pn−1 , such that
(Hnun)(x) =n∑
k=1
λϕnkh(x, xϕ
nk)un(xϕnk) .
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 13
We recall that,since α = β = 12, the n-th orthonormal Tchebychev
polynomial of the second kind pϕn =
√2Un where Un(x) = sin[(n+1)ξ]
sin ξ
and the zeros and the weights have the following expressions
xϕnk = cos
kπ
n + 1,
λϕnk =
1 − (xϕnk)
2
n + 1=
1
n + 1sin2 kπ
n + 1, k = 1, . . . , n .
We use the following representation for the fundamental Lagrangepolynomials (recalling that lϕnk(x
ϕnj) = δjk, j, k = 1, ..., n and δjk is
the Kronecher symbol)
lϕnk(x) = λϕnk
n−1∑
j=0
pϕj (xϕ
nk)pϕj (x)
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 14
lϕnk(x) =n−1∑
j=0
cϕj pϕ
j (x)
cϕj =
∫ 1
−1lϕnk(x)pϕ
j (x)ϕ(x)dx =n∑
r=1
λϕnrl
ϕnk(x
ϕnr)p
ϕj (xϕ
nr) = λϕnkpϕ
j (xϕnk)
We seek the approximate solution un in the form
un(x) =n∑
k=1
ξnklϕnk(x), un(xϕnk) = ξnk
where ξnk are n unknown. Therefore we need to solve the linear system andto do this we choose as collocation points the zeros of the n-th Tchebychevpolynomial xϕ
nr, r = 1, ..., n.
(Mγ0 + V + Hn)un(xϕnr) = f(xϕ
nr), r = 1, ..., n
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 15
Recalling that
(Hnun)(x) =n∑
k=1
λϕnkh(x, xϕ
nk)un(xϕnk),
and using Lemma 9
(V lϕnk)(x) = λϕnk
n−1∑
j=0
pϕj (xϕ
nk)(j + 1)pϕj (x),
we obtain
(Mγ0un)(xϕnr) = γ0
n∑
k=1
ξnklϕnk(xϕnr) = γ0ξnr
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 16
(V un)(xϕnr) =
n∑
k=1
ξnk(V lϕnk)(xϕnr) =
=n∑
k=1
ξnkλϕnk
n−1∑
j=0
pϕj (xϕ
nk)(j + 1)pϕj (xϕ
nr)
(Hnun)(xϕnr) =
n∑
k=1
λϕnkξnkh(xϕ
nr, xϕnk).
Denoting by
ξn = [ξnk] nk=1, ηn = [f(xϕ
nj)]n
j=1,
In = [δjk] nj,k=1, Dn = diag[1, . . . , n] , Λn = diag[λϕ
n1, . . . , λϕnn]
Un = [pϕj (xϕ
nk)]n−1, nj=0,k=1,
Vn = UTnDnUn, Hn = [h(xϕ
nj, xϕnk)]
nj,k=1,
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 17
then, we can write the system in the vectorial form
(γ0In + VnΛn + HnΛn) ξn = ηn
From δjk = 〈pϕk , pϕ
j 〉ϕ
=n∑
l=1λϕ
nlpϕk(xϕ
nl)pϕj (xϕ
nl) it follows
In = UnΛnUTn .
We assume that the vector ηn of the values of the function f at thecollocation points xϕ
nj , j = 1, . . . , n , as well as the values h(xϕnj, xϕ
nk) ,j, k = 1, . . . , n , are given.
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 18
Choose an integer 0 < m < n and write
un =m−1∑
k=0
αkpϕk +
n−1∑
k=m
αkpϕk = Pmun + Qmun ,
where
Pmu =m−1∑
k=0
〈u, pϕk〉ϕpϕ
k and Qm = I − Pm .
Set αk = 〈v∗n, pϕ
k〉ϕ
, k = m, . . . , n − 1 , where v∗n =
n−1∑k=0
β∗nkpϕ
k is
the solution of
(Mγ0 + V )vn = Lϕnf . (17)
At first we note that for the case of h ≡ 0, Theorem 1 shows that thisequation (17) is uniquely solvable for all sufficiently large n , if for f ≡ 0
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 19
equation has only the trivial solution u ≡ 0 in L2,1ϕ .
For βn = [βnk]n−1k=0 we have
[(Mγ0vn)(xϕ
nj)] n
j=1=
[γ0
n−1∑
k=0
βnkpϕk(xϕ
nj)
] n
j=1
= γ0UTnβn ,
and
[(V vn)(xϕ
nj)] n
j=1=
[n−1∑
k=0
βnk(k + 1)pϕk(xϕ
nj)
] n
j=1
= UTnDnβn .
So we can write equation (17) in the form
UTn(γ0In + Dn)βn = ηn
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 20
Recalling that In = UnΛnUTn, we can write also (17) in this way
(γ0In + Dn)βn = UnΛnηn .
Since the transform
UnΛn =
√2
n + 1
[sin
jkπ
n + 1
] n
j,k=1diag
[sin
kπ
n + 1
] n
k=1
can be applied to a vector with O(n ln n) computational complexity, wecan compute βn (and so αm, . . . , αn−1) with
O(n ln n)-complexity
taking into account the simple structure of the matrix on the left hand sideof (γ0In + Dn)βn = UnΛnηn .
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 21
The second step of our algorithm consists in setting Pmun = w∗m ,
where w∗m is the solution of
(Mγ0 + V + Lϕ
mHm
)wm = Lϕ
m
(f − (Mγ0 + V )Qmv∗
n
). (18)
This equation is equivalent to
[UT
m(γ0Im + Dm)Um + Hm
]Λmωm = ηm ,
with ωm = [wm(xϕmk)]
mk=1 and
ηm = [f(xϕmj) − ((Mγ0 + V )Qmv∗
n)(xϕmj)]
mj=1 .
The matrix Um can be generated with O(m2)-complexity using the threeterm recurrence relation of the orthogonal polynomials pϕ
j (x) . Thus this
equation can be solved with O(m3)-complexity.
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 22
The values f(xϕmj) are already been given if we choose m in such a
way that n+1m+1 is an integer, which implies xϕ
mj ∈ {xϕnk : k = 1, . . . , n}
for j = 1, . . . , m .So, it remains to compute UT
n(γ0In + Dn)βn , where
βn = [0, . . . , 0, βnm, . . . , βn,n−1]T .
This can be done with O(n ln n) operations taking into account that
UTn =
√2 diag
[sin−1 kπ
n + 1
] n
k=1
[sin
jkπ
n + 1
] n
k,j=1
can again be handled as fast discrete sine transform.
The determination of the Fourier coefficients αnk, k = 0, . . . , m − 1 ,needs O(m ln m) operations, since [αnk]
m−1k=0 = UmΛmωm .
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 23
The computation of the Fourier coefficients of un = w∗m + Qmv∗
n ,can be done with O(m3 + n ln n) numerical complexity.
Now, we make the following assumptions. For some s > 1/2
1) For f ≡ 0 equation (21) possesses in Ls,1ϕ only the trivial solution
u ≡ 0 . The same is assumed for the equation (Mγ0 + V )u = 0 .
2) h(., t) ∈ L2,s+δϕ uniformly w.r.t. t ∈ [−1, 1] and
3) h(x, .) ∈ L2,s+δϕ uniformly w.r.t. x ∈ [−1, 1] for some δ ≥ 0 .
4) The right hand side f of equation (21) belongs to L2,sϕ .
Then, we can summarize our results with the
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 24
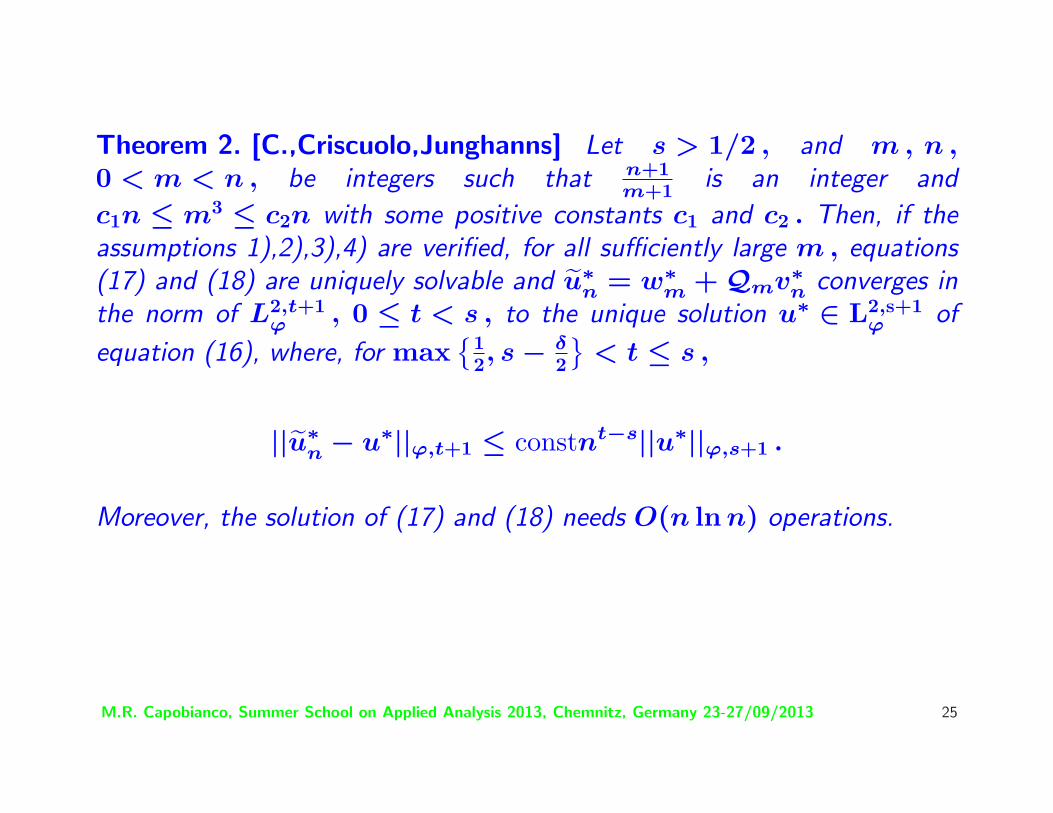
Theorem 2. [C.,Criscuolo,Junghanns] Let s > 1/2 , and m , n ,0 < m < n , be integers such that n+1
m+1 is an integer and
c1n ≤ m3 ≤ c2n with some positive constants c1 and c2 . Then, if theassumptions 1),2),3),4) are verified, for all sufficiently large m , equations(17) and (18) are uniquely solvable and u∗
n = w∗m + Qmv∗
n converges inthe norm of L2,t+1
ϕ , 0 ≤ t < s , to the unique solution u∗ ∈ L2,s+1ϕ of
equation (16), where, for max{1
2, s − δ2
}< t ≤ s ,
||u∗n − u∗||ϕ,t+1 ≤ constnt−s||u∗||ϕ,s+1 .
Moreover, the solution of (17) and (18) needs O(n ln n) operations.
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 25
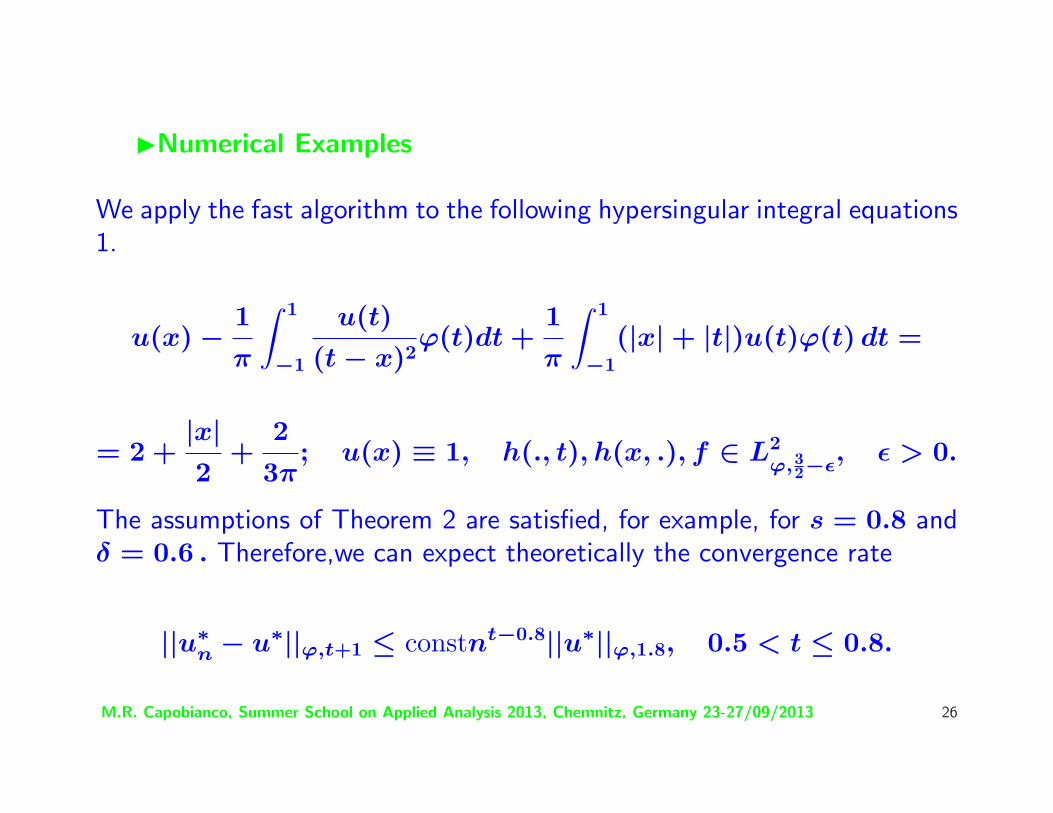
INumerical Examples
We apply the fast algorithm to the following hypersingular integral equations1.
u(x) − 1
π
∫ 1
−1
u(t)
(t − x)2ϕ(t)dt +
1
π
∫ 1
−1(|x| + |t|)u(t)ϕ(t) dt =
= 2 +|x|2
+2
3π; u(x) ≡ 1, h(., t), h(x, .), f ∈ L2
ϕ,32−ε, ε > 0.
The assumptions of Theorem 2 are satisfied, for example, for s = 0.8 andδ = 0.6 . Therefore,we can expect theoretically the convergence rate
||u∗n − u∗||ϕ,t+1 ≤ constnt−0.8||u∗||ϕ,1.8, 0.5 < t ≤ 0.8.
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 26
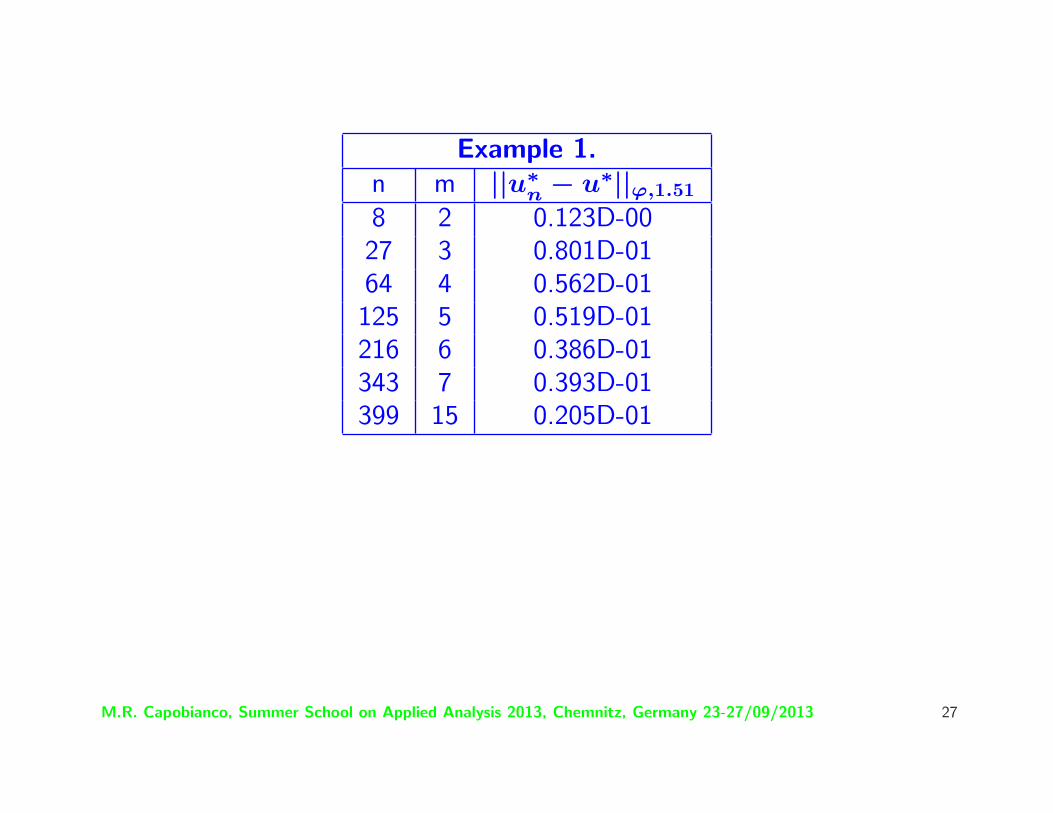
Example 1.n m ||u∗
n − u∗||ϕ,1.51
8 2 0.123D-0027 3 0.801D-0164 4 0.562D-01125 5 0.519D-01216 6 0.386D-01343 7 0.393D-01399 15 0.205D-01
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 27
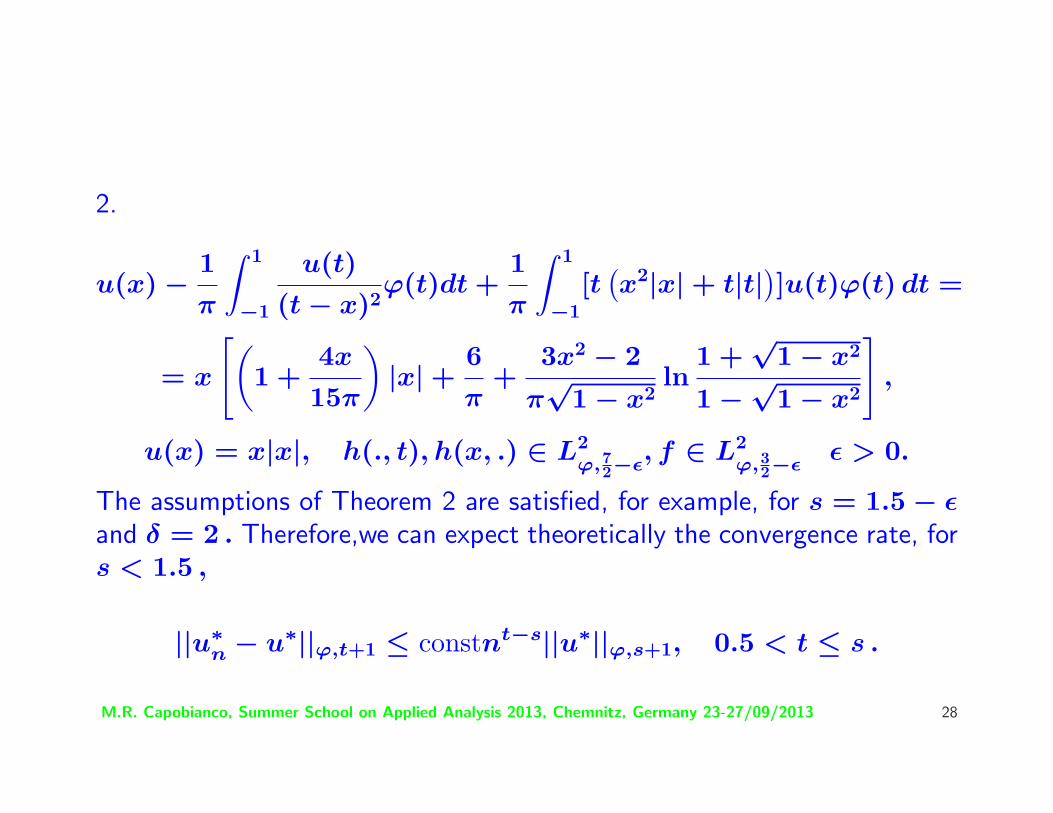
2.
u(x) − 1
π
∫ 1
−1
u(t)
(t − x)2ϕ(t)dt +
1
π
∫ 1
−1[t
(x2|x| + t|t|)]u(t)ϕ(t) dt =
= x
[(1 +
4x
15π
)|x| +
6
π+
3x2 − 2
π√
1 − x2ln
1 +√
1 − x2
1 − √1 − x2
],
u(x) = x|x|, h(., t), h(x, .) ∈ L2ϕ,72−ε
, f ∈ L2ϕ,32−ε
ε > 0.
The assumptions of Theorem 2 are satisfied, for example, for s = 1.5 − εand δ = 2 . Therefore,we can expect theoretically the convergence rate, fors < 1.5 ,
||u∗n − u∗||ϕ,t+1 ≤ constnt−s||u∗||ϕ,s+1, 0.5 < t ≤ s .
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 28
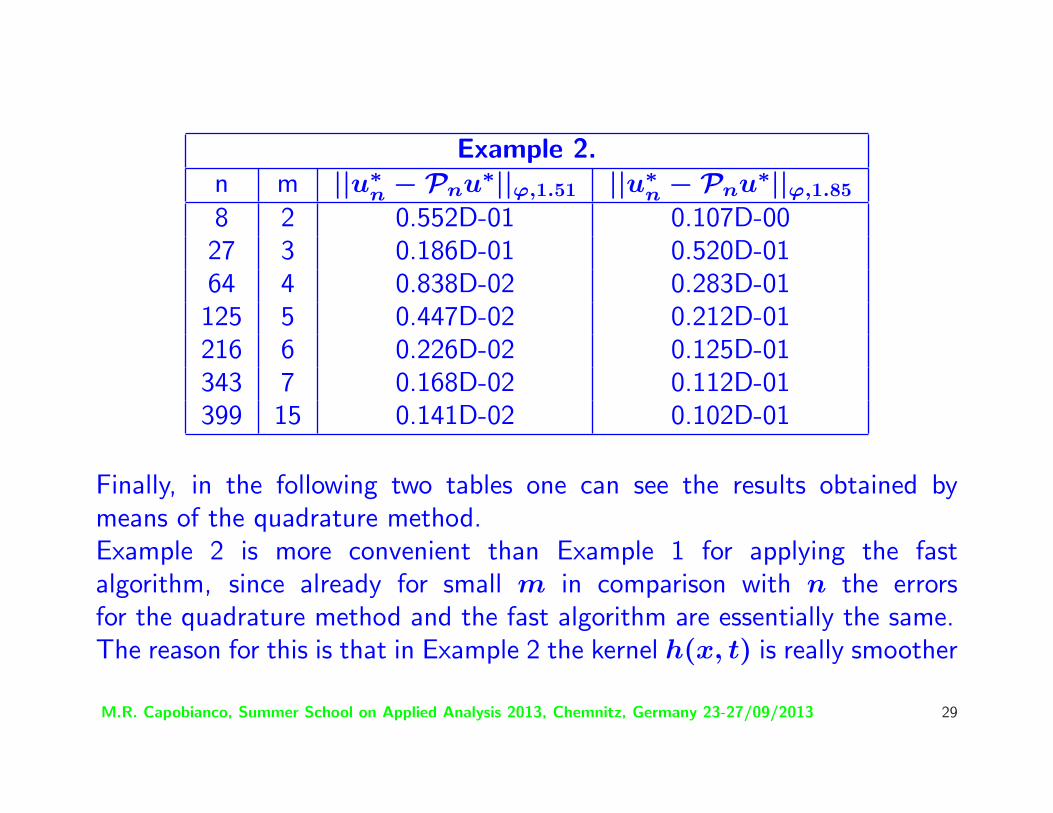
Example 2.n m ||u∗
n − Pnu∗||ϕ,1.51 ||u∗n − Pnu∗||ϕ,1.85
8 2 0.552D-01 0.107D-0027 3 0.186D-01 0.520D-0164 4 0.838D-02 0.283D-01125 5 0.447D-02 0.212D-01216 6 0.226D-02 0.125D-01343 7 0.168D-02 0.112D-01399 15 0.141D-02 0.102D-01
Finally, in the following two tables one can see the results obtained bymeans of the quadrature method.Example 2 is more convenient than Example 1 for applying the fastalgorithm, since already for small m in comparison with n the errorsfor the quadrature method and the fast algorithm are essentially the same.The reason for this is that in Example 2 the kernel h(x, t) is really smoother
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 29
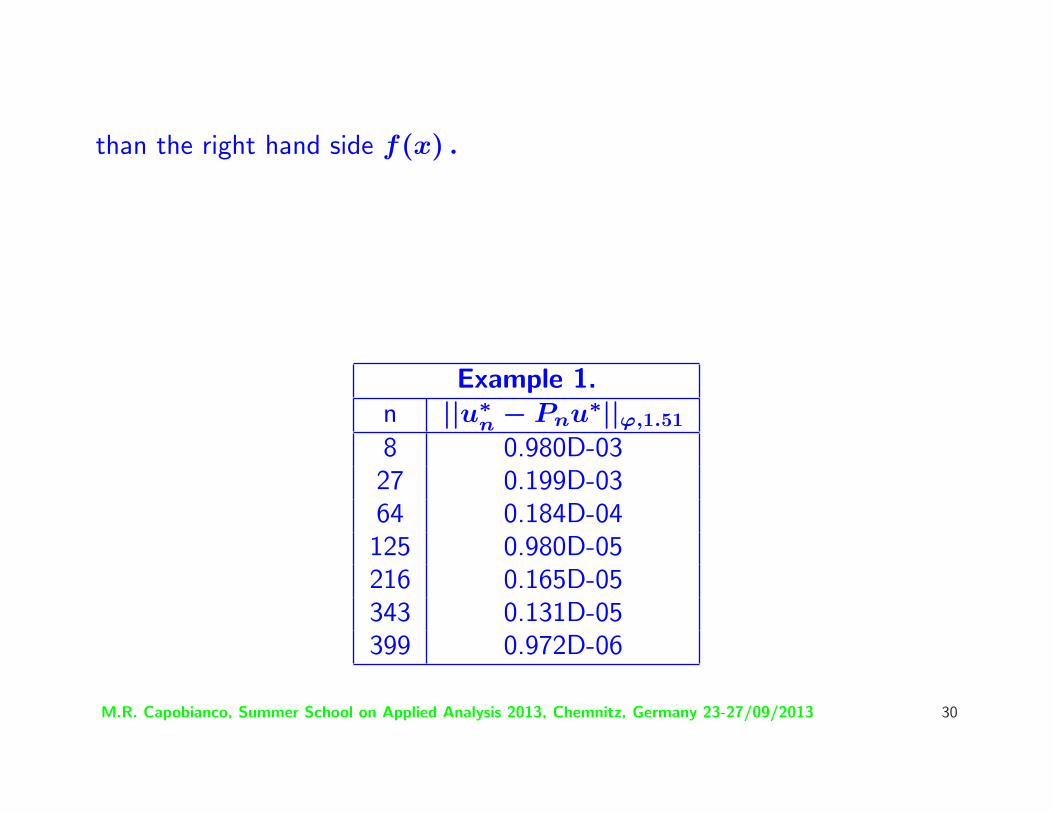
than the right hand side f(x) .
Example 1.n ||u∗
n − Pnu∗||ϕ,1.51
8 0.980D-0327 0.199D-0364 0.184D-04125 0.980D-05216 0.165D-05343 0.131D-05399 0.972D-06
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 30
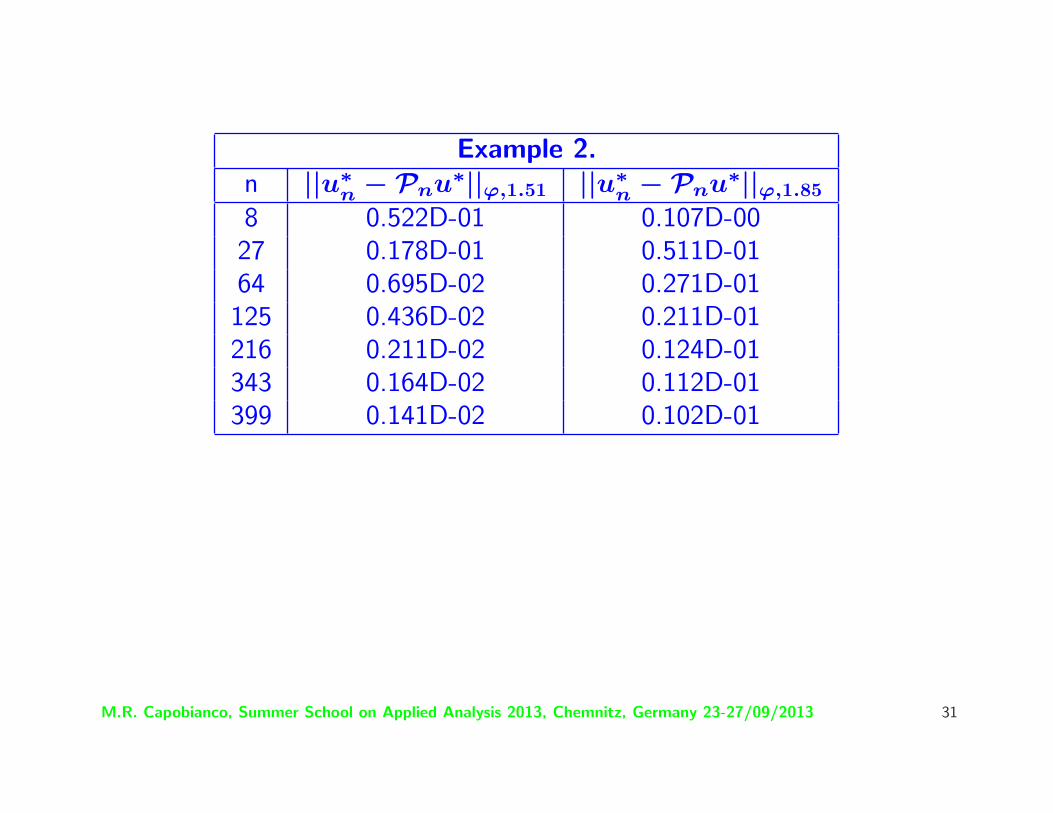
Example 2.n ||u∗
n − Pnu∗||ϕ,1.51 ||u∗n − Pnu∗||ϕ,1.85
8 0.522D-01 0.107D-0027 0.178D-01 0.511D-0164 0.695D-02 0.271D-01125 0.436D-02 0.211D-01216 0.211D-02 0.124D-01343 0.164D-02 0.112D-01399 0.141D-02 0.102D-01
M.R. Capobianco, Summer School on Applied Analysis 2013, Chemnitz, Germany 23-27/09/2013 31