Embed Size (px)
Citation preview

3/7/2011
1
Lecture 2010-03-16
• K-space
• Intro to k-space sampling (chap 3)
– Frequency encoding and phase encoding
• Discrete sampling (chap 2)
– Point Spread Function
– K-space properties
• K-space sampling principles (chap 3)
• Basic Contrast mechanism (chap 4)
• K-space
• Intro to k-space sampling
– Frequency encoding and phase encoding
• Discrete sampling
– Point Spread Function
– K-space properties
• K-space sampling – Pulse Sequence
• Basic Contrast mechanisms
k-space
3FYS-KJEM 4740
k = γ G(τ )0
t
∫ dτ =
kx
ky
kz
Limiting discussion to a slice (2D – xy plane), magnetization distribution is given by the
2-dimensional Fourier transform of the spin distribution across the slice
MT (t) = ρ(r)⋅ exp − jk⋅ r( )drslice
∫∫
ρ(r) is obtained from the inverse Fourier transform of MT(t) under the influence of a
known gradient configuration
ρ(x,y) =1
2πMT(kx ,ky )exp j kxx + kyy( )( )dkxdky
ky
∫kx
∫
k-space = visualization of the distribution of spatial frequencies in the image.
k-space = Fourier transform of the MR image
FT
{FT}-1
FT
{FT}-1
FT
{FT}-1
FT
{FT}-1
( )( )∫ ∫ +=
x yk k
yxyxyxT dkdkykxkjkkMyx exp),(2
1),(
πρ
MT(t)
== ∫z
y
xt
k
k
k
dττγ0
)(Gk
k-space illustrations
4FYS-KJEM 4740
Gy
Combination of Gx and Gy to “rotate” the total gradient
orientation � reconstruction by back projection
slice selectionGz
Gx
echo
Use of gradients to make an image
5FYS-KJEM 4740
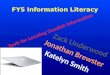
Zeugmatography
Relationship between a three-dimensional object, its two-dimensional projection along the Y-axis,
and four one-dimensional projections at 45° intervals in the XZ-plane. The arrows indicate the gradient directions.
Lauterbur PC. Image formation by induced local interactions: examples of employing nuclear magnetic resonance. Nature 1973; 242: 190-
191.
6FYS-KJEM 4740

3/7/2011
2
• K-space
• Intro to k-space sampling
– Frequency encoding and phase encoding
• Discrete sampling
– Point Spread Function
– K-space properties
• K-space sampling – Pulse Sequence
• Basic Contrast mechanisms
7FYS-KJEM 4740
Sum of waves with
different frequencies
Frequency information
Difference of phases
between the 2 sumsSame frequencies as
above
What describes waves (signal)
FYS-KJEM 4740 8
SE magnetization evolution
9FYS-KJEM 4740
ki = γ Gi t( )0
′ t
∫ dt
The phase angle of a spin in a slice at a time t is
given by:
( ) txGtyGdttyxxyn
t
γγω +=∫′
0,,
Gradient y “on”
Definition of k:
pulsed field gradient along x
tx
Gx
(in the direction i) surface
The total transverse magnetisation is a function of kx, ky and the position in the
slice: MT(kx, ky)
Image reconstruction:
2D Fourier Transform
FYS-KJEM 4740 10
ρ(x,y) =1
2πMT(kx ,ky )exp j kxx + kyy( )( )dkxdky
ky
∫kx
∫
dephasing
sampling of the signal which
contains frequency information
(x-axis)
Spin Echo: freq. encoding
slice selection
Read-out direction
(frequency encoding)
Gz
Gx
FYS-KJEM 4740 11
t=0 t=TE/2 t=TE
echo
phase encoding
Spatial information in
“y” direction
Gy
Phase encoding
Gzslice selection
Read-out direction
(frequency encoding)
Gz
Gx
acquisition of a profile
FYS-KJEM 4740 12
t=0 t=TE/2 t=TE

3/7/2011
3
Phase encoding:
needs multiple
echo acquisitions
Frequency and Phase encoding
FYS-KJEM 4740 13
acquisition of a profile
signal acquisition
FYS-KJEM 4740 14
profile
Digital signal sampling
15FYS-KJM 4740
Discrete samplingDiscrete sampling
• K-space
• Intro to k-space sampling
– Frequency encoding and phase encoding
• Discrete sampling
– Point Spread Function
– K-space properties
• K-space sampling – Pulse Sequence
• Basic Contrast mechanisms
16FYS-KJEM 4740
Sampling interval: U(t) = 1 if t ∈ [-Tread/2, Tread/2] and 0 elsewhere
Signal sampling is modulated by a Block Function U(t)
Tread = N.ts
In frequency domain, this translates to:
Tread
U(t)
MR-signal (MT)
Discrete sampling
PSF(x) = FFT U(t)( ) = U(t)e(− iγGx .x.t )dt
−∞
+∞
∫17FYS-KJEM 4740 18FYS-KJM 4740
PSF (x) = A.e(−iγGx .x.t )dt
−Tread / 2
+Tread / 2
∫
PSF(x) =−A
iγGxxe
(−iγGx .x .t )[ ]−Tread / 2
Tread / 2
PSF(x) =A sin(γGx .x.Tread / 2)
γGxx
PSF(x) = Tread
sinγGxxTread
2
γGxxTread
2
periodic function (See eq. 2-24)

3/7/2011
4
PSF(x)
19FYS-KJM 4740
P…
δ function
(point object)
image representation
of the point object
We can calculate the Full Width at Half Height (FWHH)
∆x =π
γ ⋅ Gx ⋅ Tread
λ = 2π / kxwavelength
Field of View (FOV)
20FYS-KJM 4740
ρ(x,y) =1
2πMT(kx ,ky )exp j kxx + kyy( )( )dkxdky
ky
∫kx
∫ ρ(x,y) =1
2πMT(kx )exp j kxx( )( )dkx
kx
∫
kx, max = γGx⋅ Tread / 2 (smallest wavelength)
Tread = N.ts
λmax =2π
kx, min
=2π
γGx ts
= FOVx
Gx =2π
γ ⋅ FOVx ⋅ ts
=2π
γ
fs
FOVx
Gx is automatically calculated by the scanner
FOVx is entered by the user (see Eq. 2-28)
FOVy
21FYS-KJM 4740
Same definition can be done for the phase encoding direction
FOVy =2π
ky, min
=2π
γ Gy, n −Gy, n−1( )Ty
π phase difference at the edge of the FOVy
Consider a square matrix: N2 = Nx.Ny
Gy,n − Gy,n−1 = ∆Gy We need to have ∆Gy ⋅N
2= Gy, max
Gy, max =πN y
γTyFOVy
(See Eq. 2-33)
K-space properties
sxx tNGx
γ
πδ
2=
Resolution (x):
Field of view (x):
x
sxx
x FoVtGk
===γ
ππλ
22
min,
max,
Field of view (y):
yy
y
yyTG
NFoV
max_
max,γ
πλ ==
Maximum frequency in read-out (x) direction
2/max xx FoVGγω ±=±
πγ 2//1 xxs FoVGt ≥
Min sampling rate (x):
yyyyFoVTGN
max_γ=
‘Sampling rate ‘ (y):
22FYS-KJEM 4740
FT
{FT}-1
∆x ∆kx
F(k)S(r)
FoVx
FoV
y
∆y ∆ky
Nx∆kx
Ny∆ky
ts
ky
kx
-ωmax = -γGxFoVx/2 ωmax = γGxFoVx/2
.ρ(x,y)
kx_max
( )( )∫ ∫ +=
x yk k
yxyxyxT dkdkykxkjkkMyx exp),(2
1),(
πρ
== ∫z
y
xt
k
k
k
dττγ0
)(Gk
K-space vs image space
23FYS-KJEM 4740
Object FoV
Image FoV
Increase 1/ts, Nx
discardeddiscarded
Back-folding / x direction
24FYS-KJEM 4740

3/7/2011
5
Image F
oV
y
Obje
ct F
oV
y
Back-folding / y direction
Fold-Over artefact
25FYS-KJEM 4740
FFT 1D: Truncation Artefact
26FYS-KJEM 4740
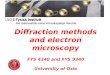
FFT 2D: Truncation artefact
Ringing- (or truncation) artifacts in regions with high spatial frequencies (edges)
in a phantom. The artifacts are more evident in the right image due to a lower matrix (N=112, vs N=256 in the left image).
27FYS-KJEM 4740
Truncation artifact
28FYS-KJEM 4740
Fold-Over artefact
29FYS-KJEM 4740
• K-space
• Intro to k-space sampling
– Frequency encoding and phase encoding
• Discrete sampling
– Point Spread Function
– K-space properties
• K-space sampling – Pulse Sequence
• Basic Contrast mechanisms
30FYS-KJEM 4740

3/7/2011
6
Phase encoding:
needs multiple
echo acquisitions
Frequency and Phase encoding
FYS-KJEM 4740 31
acquisition of a profile
Pulse sequence introduction
Field gradients � Spatial coding
• frequency encoding (gradient x “on” during
signal acquisition)
• Phase encoding (gradient y “on” before
signal acquisition, repeated at different
amplitudes)
32FYS-KJM 4740
Spatially encoded Echoes
• Spin-Echo: SE
Use of gradient in a spin-echo experiment to
induce spatially dependent “dephasing” and “re-
phasing”
• Gradient Echo: GRE
Gradient “induced” echo
33FYS-KJM 4740
dephasing
sampling of the signal which
contains frequency information
(x-axis)
Spin Echo: freq. encoding
Read-out direction
(frequency encoding)
Gx
FYS-KJEM 4740 34
t=0 t=TE/2 t=TE
echo
90° 180°
z
x y
z
x y
z
x y
echo
z
x y
z
x y
M
0
Gx
TE
Gradient Echo90°
35FYS-KJEM 4740
Gradient Echo
kx =γ
2πGx _ rewdt +
0
Ty
∫ Gx _ rewdtTy
Ty +Tread / 2
∫
= 0⇒ Gx _ rewTy + Gx _ r
Tread
2= 0
T2* relaxation (FID)
M xy
tTE
T2* relaxation (FID)
M xy
tTE
36FYS-KJEM 4740

3/7/2011
7
Gradient Echo (GRE)
37FYS-KJM 4740
“Travelling” in k-space
38FYS-KJM 4740
kx
ky
RF
Gz
Gy
Gx
1 sample
kx
kyky
RF
Gz
Gy
Gx
RF
Gz
Gy
Gx
1 sample
Gx
Gradient Echo90°
TE
ky
kx
39FYS-KJEM 4740
Gx
Gradient Echo90° ky
kx
TE
40FYS-KJEM 4740
Gx
Gradient Echo90°
TE
ky
kx
ts
repeated Ny times
41FYS-KJEM 4740
Gx
Gradient Echo90°
TE
ky
kx
42FYS-KJEM 4740

3/7/2011
8
read-out
phase encode
sliceselection
180º rf pulse
kx
ky
echo
Acquisition of a profile
Spin-Echo k-space travelling
FYS-KJEM 4740 43
t=0 t=TE/2 t=TE
90° 180°t=
TE
/2
t=TE
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of a profile
Repeated Phase encoding
FYS-KJEM 4740 44
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of a profile
Repeated Phase encoding
FYS-KJEM 4740 45
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of a profile
Repeated Phase encoding
FYS-KJEM 4740 46
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of a profile
Repeated Phase encoding
FYS-KJEM 4740 47
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of a profile
Repeated Phase encoding
FYS-KJEM 4740 48

3/7/2011
9
Repeated Phase encoding
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
Acquisition of profile
FYS-KJEM 4740 49
Repeated Phase encoding
slice selection
Read-out direction
(frequency encoding)
phase encoding
Spatial information in “y”
direction
Gz
Gx
Gy
acquisition of all profiles
FYS-KJEM 4740 50
Repeated acquisition of profiles
ky
kx
the field of view:
FOV
profiles
FOV depends on the
- gradient strengths- sampling time of a profile
FYS-KJEM 4740 51
+128
-127
K0
phase
frequency
52FYS-KJEM 4740
+128
-127
K0
phase
frequency
53FYS-KJEM 4740
kx
frequency encoding
ky
phase encoding
2D FT
Signal intensity
distribution in the
selected slice
frequency ωx
ωy
m x, y( )=1
2πMT kx ,ky( )exp i kx x + ky y( )[ ]dkxdky
ky
∫kx
∫
FYS-KJEM 4740 54

3/7/2011
10
frequency ωx
ωy
IMAGE
x
y
Image generation
FYS-KJEM 4740 55
• K-space
• Intro to k-space sampling
– Frequency encoding and phase encoding
• Discrete sampling
– Point Spread Function
– K-space properties
• K-space sampling – Pulse Sequence
• Basic Contrast mechanisms
56FYS-KJEM 4740
TE and TR
57FYS-KJEM 4740
TRTR
TETE
0time
100
Longitudinal and Transverse
Relaxation:
90o
Basic Contrast
58FYS-KJEM 4740
0time
100
Longitudinal and Transverse
Relaxation: at the same moment
90o
magnetisation
signal
59FYS-KJEM 4740
short T1
0time
100
90o
90o
60FYS-KJEM 4740

3/7/2011
11
short T1
short T2
0time
100
90o
90o
61FYS-KJEM 4740
long T1
0time
100
90o
90o
62FYS-KJEM 4740
long T1
long T2
0time
100
90o
90o
63FYS-KJEM 4740
0time
100
90o
repetition time
TR90
o
64FYS-KJEM 4740
0time
100
90o
90o
echo time
TE
65FYS-KJEM 4740
0time
100
90o
90o
Short TE
66FYS-KJEM 4740

3/7/2011
12
0time
100
90o
90o
Longer TE
67FYS-KJEM 4740
0time
100
90o
90o
2 different tissues with different T1/T2
68FYS-KJEM 4740
T1 contrast – brain example
0time
100
90o
White matter
Grey matter
69FYS-KJEM 4740
T1 contrast
0time
100
90o
90o
WM
GM
70FYS-KJEM 4740
T1 contrast
0time
100
90o
90o
WM
GM
71FYS-KJEM 4740
T1 contrast
0time
100
90o
90o
WM
GM
72FYS-KJEM 4740

3/7/2011
13
T1 contrast
0time
100
90o
90o
WM
GM
73FYS-KJEM 4740
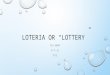
TE 10 ms TE 30 ms TE 40 ms
TR 400 ms
T1-weighted images
74FYS-KJEM 4740
T1 weighted images:
TR short (SE)
TE short
< 600 ms (can be as low as 1.5ms)
< 25 ms
75FYS-KJEM 4740
Fat bright
bone marrow
white matter
musclegrey
body fluids
bone
air black
grey matter
TR < 600 ms TE < 25 ms
i.v.contrast
76FYS-KJEM 4740
T1-w knee
77FYS-KJEM 4740
PD (ρ*, proton density) & T2 contrast
0time
100
90o
90o
78FYS-KJEM 4740
* Denoted rho contrast in the compendium

3/7/2011
14
PD & T2 contrast
0time
100
90o
90o
79FYS-KJEM 4740
PD & T2 contrast
0time
100
90o
90o
80FYS-KJEM 4740
PD contrast – long TR, short TE
0time
100
90o
81FYS-KJEM 4740
T2 contrast: TE increases
0time
100
90o
82FYS-KJEM 4740
T2 contrast, long TR, long TE
0time
100
90o
83FYS-KJEM 4740
PD & T2 weighted images
TR 2500 ms
TE 20 ms
TE 60 ms
TE 100 ms
TE 140 ms
84FYS-KJEM 4740

3/7/2011
15
T2 weighted images:
TR long
TE long
> 1800 ms
> 80 ms
85FYS-KJEM 4740
Spine / summary
T1 weighted T2 weighted
86FYS-KJEM 4740
Table of relaxation times
87FYS-KJM 4740
From: Greg J. Stanisz, Magnetic Resonance in Medicine 54:507–512 (2005)