Embed Size (px)
Citation preview

A Brief Review of Acoustic Trapping and Manipulation of Living cells
Frederick A. O. White(Dated: December 3, 2014)
The development of centimetre and micrometre scale acoustic manipulation systems has led to increasinginterest in their possible applications in biophysics. This review investigates the current state of the art inacoustic manipulation, its challenges and potential applications to the study of live cells. The ability to trapand manipulate live cells raises the possibility of selective labelling and drug delivery to subsets of cells in acontrolled environment. Various approaches to manipulating cells are considered and discussed.
INTRODUCTION
Acoustic trapping was first observed in 1868 duringKundt’s tube experiments, where cork dust aligned with thestanding wave in an air-filled resonant cylinder[1]. The firsttheoretical description of the acoustic radiation force for in-compressible spheres was produced in 1934 by King[2]. Thiswas extended to compressible particles in 1955 by Yosiokaand Kawasima[3] and finally generalised for viscid fluids in1962 by Gor’kov, whose derivation is most commonly usedtoday[4].
Acoustic manipulation traps cells by the pressure gradientproduced in a non-uniform acoustic field. Interest in acousticmanipulation for biophysics applications has grown rapidlyover the last decade. Acoustic manipulation enables non-invasive, non-contact trapping of cells and particles withoutthe need to remove them from their culture[5]. This can ben-efit the study of cells by allowing the study of groups of cellsin a controlled environment over longer periods than possibleif cells can move freely. Acoustic manipulation is less likelyto damage cells than mechanical techniques and allows trap-ping without affecting the environment around the cell, mak-ing it suitable for delicate cell cultures and precise studies[6].Acoustic manipulation has advantages over other non-contactmethods being cheap, easy to integrate into microfluid sys-tems and maintaining cell viability[6]. The only requirementof cells for acoustic trapping is a density and compressibilitycontrast with the cell-carrying medium, so it is applicable toa wide range of cells and particles[7, 8]. One disadvantageis the relatively low precision and poor single-cell control, al-though recent work has begun to mitigate these issues usinghigher order Bessel functions while manipulating µm scalepolystyrene beads[9]. The main focus of this review, how-ever, will be the application of acoustic manipulation to livingcells, and its success and future potential for cell studies.
THEORY
Acoustic manipulation uses the primary radiation force(PRF). This arises when an ultrasonic standing wave inter-acts by scattering off a particle or cell with an acoustic con-trast to the fluid medium. The PRF moves particles to a pointof either maximum or minimum acoustic potential dependingon this contrast[5]. The standard approach, originally due to
Gor’kov[4], is to write the PRF as the gradient of the acous-tic potential. A full derivation is available in Bruus’ 2007paper[10] the result of which is:
F rad = −∇Urad (1a)
Urad =4π
3a3
[f1
1
2κ0〈p21〉 − f2
3
4ρ0〈v21〉
](1b)
where 〈v21〉 and 〈p21〉 are the time-averaged incoming velocityand pressure fields squared, κ0 and ρ0 are the compressibilityand density of the fluid and the subscript p in Eq.2 denotesthe same quantities for the spherical particle radius a. Thequantities f1 and f2 are dimensionless scattering coefficientsdefined by the value of the compressibility and density of theparticle compared to that of the surrounding fluid.
f1(κ) = 1− κ with κ =κpκ0
(2a)
f2(ρ) =2(ρ− 1)
2ρ+ 1with ρ =
ρpρ0
(2b)
The form of these coefficients means that most cells willmove to the minima in the potential since their density tendsto be higher and their compressibility lower than the surround-ing medium[5]. Once the first cells are entrapped, secondaryforces gather nearby cells into a cluster centred on the nodalpoint. It is significant that the acoustic force experiencedby a cell scales with volume, not radius, so smaller particlesare harder to manipulate as the Stokes’ drag they experiencescales with radius and so falls off more slowly than the appliedtrapping force.
ALTERNATIVES TO ACOUSTIC MANIPULATION
There are several alternative approaches to non-contact cellhandling besides acoustic manipulation. Optical tweezers trapcells at the focal point of a laser beam. This has the ad-vantage of extreme precision, on the scale of nanometres.However, the laser can deposit significant energy in cellsand the equipment is difficult to integrate with cell-culturecontainers[6, 11]. Additionally, optical tweezers are limitedto <10µm cell diameters, whereas acoustic manipulation can

2
reach the range of ∼100µm[11]. The ability of optical tweez-ers to manipulate single cells has led to interest in combiningoptical tweezers and acoustic manipulation to use the best fea-tures of both: acoustic manipulation to handle large groups ofcells and operate over relatively large areas but with the pre-cision of optical tweezers for single cells[12].
Magnetic trapping and electrophoresis use non-uniformmagnetic and electric fields respectively. Magnetic trapping islimited in its applicability to live-cell studies by the need foreither naturally magnetic cells or doped cells. Electrophore-sis provides better precision than acoustic manipulation butrequires strong gradients in the field, which limits the work-ing distance as the electrodes must be closely spaced. There isalso the risk of Joule heating in fluid media which can damagecells[13].
APPLICATIONS OF ACOUSTIC MANIPULATION
The ability to immobilise cells is useful as it allows thestudy of particular groups of cells in a strictly controlled en-vironment, since a well designed acoustic device should notsignificantly affect the medium or cells. This makes it suit-able for for a wide range of biophysics applications.
Acoustic manipulation has been applied in high-resolution cell response studies and to characterise cell–cellinteractions[14]. Other applications include reducing thetime needed to create 3D cell clusters and enhance bioassays,which may have applications in tissue engineering[11].Ultrasound in the MHz range has been applied for filtrationand cell gathering since the 90s[15, 16]. Initially filtrationwas achieved by agglomerating cells using acoustic ma-nipulation and allowing them to settle before drawing offclear fluid. More recently work on micrometre scales hasachieved in-flow filtering and cell washing. Working withflowing media allows cell environments to be maintainedduring processing[5, 17]. A recent application of acousticmanipulation is in the study of non-adherent cells, where theability to group cells that do not naturally cluster or grow onsurface cultures is of great benefit[14].
DESIGN OF DEVICES
The standing wave field required for acoustic manipulationcan be produced in several ways. Ultrasound waves are al-most always produced using piezoelectric ceramics[7]. Forall devices the acoustic impedance of various layers must beconsidered to either transmit acoustic energy or reflect it asnecessary.
The most common approach is a multilayer resonant sys-tem, consisting of stacked layers, from bottom to top: trans-ducer, coupling layer, fluid, and a reflecting layer. The thick-ness of the layers must be tuned carefully to achieve reso-nance. This dependence on geometry limits resonant systems’
manipulation capacity since the nodal positions of the acous-tic field are fixed. Other approaches include using focusedultrasound beams (first developed by Wu in 1991 [18]) in amethod similar to optical tweezers, or using a linear array oftransducers opposite a reflector. Linear arrays have been ap-plied successfully in 300µm channels by Demore et al.[19].
The final approach, and the one applied in this project, is toproduce a standing wave using an opposed pair of transducersemitting counter-propagating travelling waves. This has theadvantage of being unaffected by changes in the resonant fre-quency of the chamber due to large numbers of particles in thefluid[20]. One challenge is to eliminate reflection at the trans-ducers, to avoid production of a resonant wave in addition tothe desired standing wave. Arbitrary positioning of the nodalpoints by adjustment of the relative phases of the waves andrapid variation of the field is possible even in a chamber sev-eral wavelengths long. This is advantageous for fine control ofparticles and also allows a larger working volume in compar-ison to microfluidic resonant systems. While opposing trans-ducers allow arbitrary nodal positioning, the traps are alwaysat half-wavelength separation and any phase variation affectsall traps simultaneously[21]. An early example of an opposingtransducer system was developed by Kozuka[22], with recentwork by Courtney et al. demonstrating manipulation in oneand two dimensions[21, 23]. Manipulation in two dimensionsis achieved by using two opposed pairs emitting at 90◦ to eachother, producing a grid-like series of nodes. One limiting fac-tor in this technique is the frequency and impedance matchingof the opposed transducers. The closer in frequency the twotravelling waves are, the greater the amplitude of the stand-ing wave created and the stronger the trapping. Impedancematching ensures similar mechanical responses under loadfrom each transducer, so their resonances shift together[24].Grinenko et al. have demonstrated the possibility of work-ing with unmatched transducers by the application of acousticabsorbers behind the transducers[25].
Acoustic streaming presents a problem for all manipula-tion and trapping. This is caused by the bulk fluid absorbingacoustic energy, leading to flow, which can force cells out ofthe area of interest via drag forces and cause unwanted stresson cells[26]. There are three forms of streaming: Eckart,Schlichting and Rayleigh. Eckart streaming is the largest inmagnitude but is strongly influenced by the depth of fluidand can be reduced significantly by working in shallowerfluids[27].
CHARACTERISING A DEVICE – EFFECTS ON CELLVIABILITY AND MANIPULATION CAPABILITIES
Having constructed a functioning device for acoustic ma-nipulation, it is necessary to characterise its capabilities andimpact on cells. The first step in any cell study is to main-tain viability. There is large body of evidence that medicalultrasound at low intensity has no significant impact on hu-man tissue[28, 29]. While this is true for bulk tissues it may
3
not hold true for individual cells or different cell types, soeach case must be considered individually. In general thedamaging effects of ultrasound are considered as thermal ornon-thermal. Thermal effects are problematic since most cellshave a suitable temperature range for proliferation of a fewdegrees centigrade, thus heating can easily push the cultureout of this range. Fortunately thermal absorption by water inthe range of 1–10MHz, most commonly used for ultrasonicacoustic trapping, is low. In the case of small volumes, di-rect heat transfer from transducers can present issues, but thiscan be mitigated with careful cooling of the transducers [30].Temperature in acoustic devices can be tracked via fluores-cence studies using Rhodamine B[11]. Using Rhodamine re-moves the need for a physical thermocouple which would dis-turb the acoustic field.
Non-thermal effects include stresses applied to cells by theacoustic radiation force, streaming (see previous page) andcavitation. Cavitation is generally negligible for the MHz fre-quencies used in acoustic manipulation; it also requires nucle-ating sites for bubble formation, so can be mitigated by use ofdegassed water with few microscopic bubbles present[31].
Despite the potential for adverse effects, several studieshave demonstrated the viability of cells held in ultrasoundtraps. Bazou et al. tested embryonic stem cells[26, 32], Hul-strom COS-7 cells[33], Evander et al. yeast cells[11] andHaake et al. HeLa cells[34]. Each group was working withtheir own device, demonstrating that cells remain viable un-der a variety of acoustic conditions. The simplest method forquantifying the impact of trapping on cell viability is throughobservations of cell membrane integrity using an optical mi-croscope or cell-counting device. Several dyes exist which in-crease the visibilty of damaged cells by either tracking activemetabolic processes or only penetrating ruptured cells[30].
A recently developed method for direct measurement of theforce uses optical tweezers. Particles are held in the opticaltweezers at a known position with known force, since opticaltrapping has well–established parameters. The acoustic poweris increased until the particle escapes the optical trap. An ad-vantage of this route is that it makes no assumptions about thefluid or pressure field. Another route to measuring forces isto apply particle image velocimetry as particles move towardsthe nodal points in a field[24].
PROJECT PROGRESS
The aim of the project is to design and construct acentimetre-scale ultrasound trap which maintains cell viabil-ity, allows optical access for live imaging and can be sterilisedfor reuse.
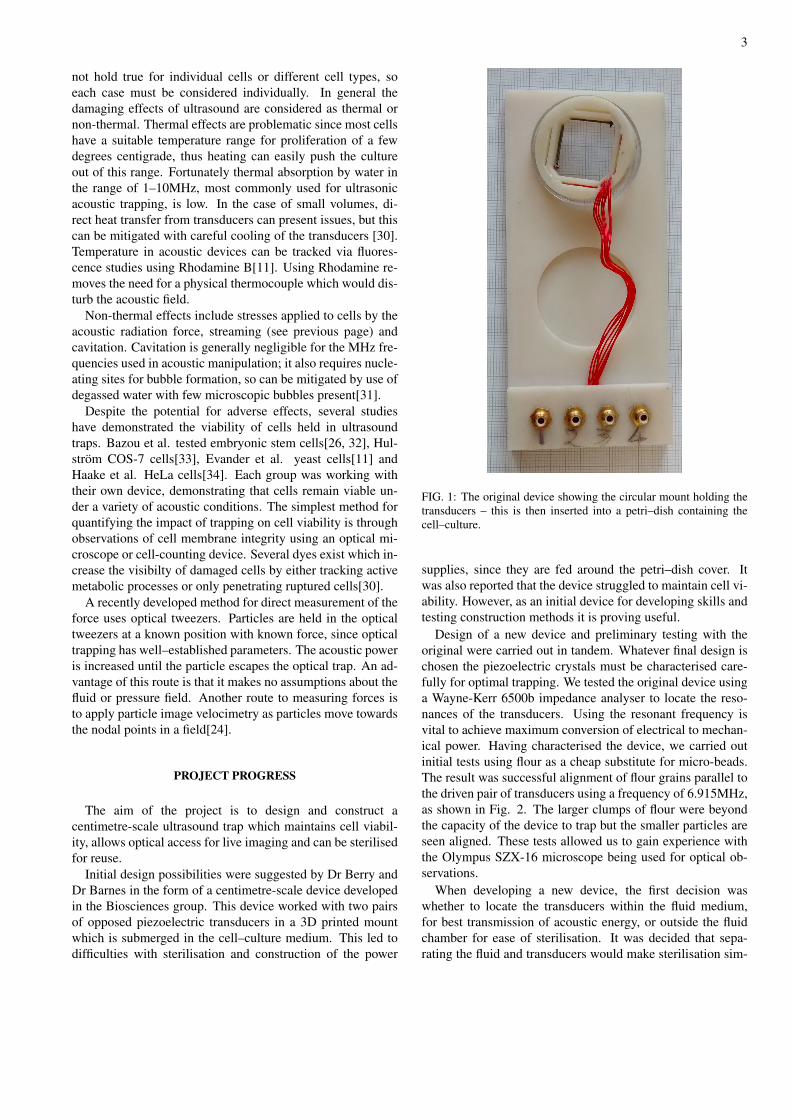
Initial design possibilities were suggested by Dr Berry andDr Barnes in the form of a centimetre-scale device developedin the Biosciences group. This device worked with two pairsof opposed piezoelectric transducers in a 3D printed mountwhich is submerged in the cell–culture medium. This led todifficulties with sterilisation and construction of the power
FIG. 1: The original device showing the circular mount holding thetransducers – this is then inserted into a petri–dish containing thecell–culture.
supplies, since they are fed around the petri–dish cover. Itwas also reported that the device struggled to maintain cell vi-ability. However, as an initial device for developing skills andtesting construction methods it is proving useful.
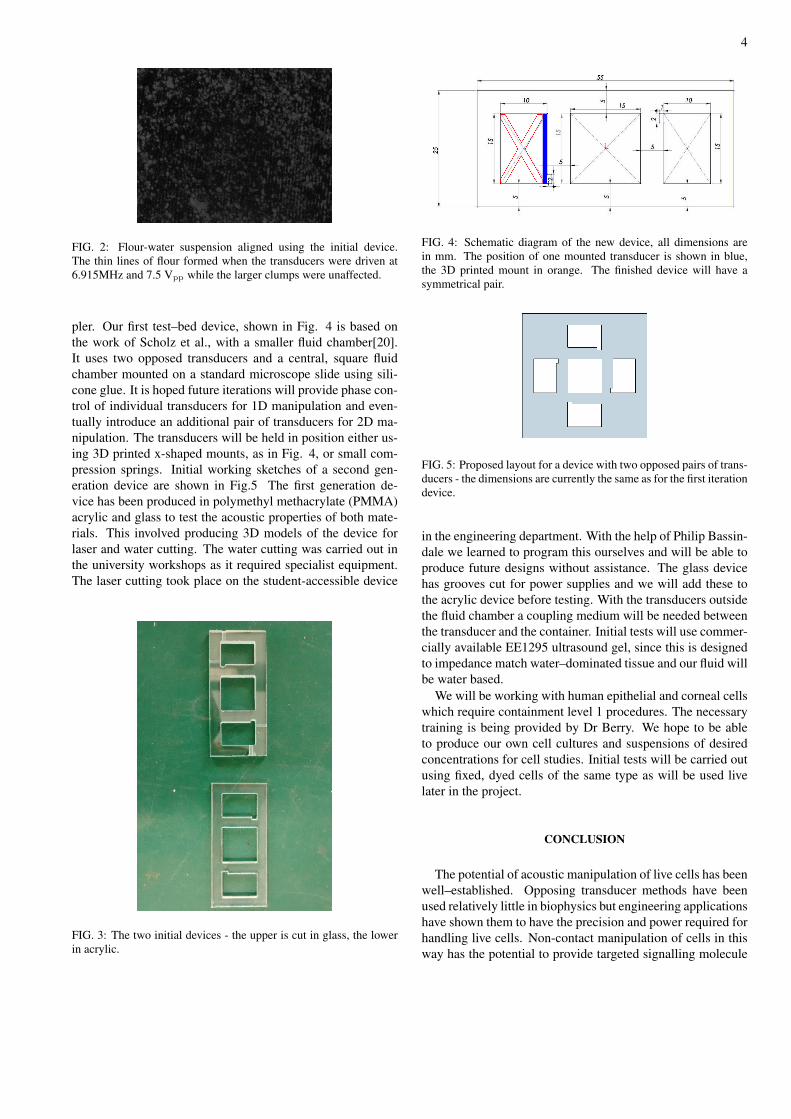
Design of a new device and preliminary testing with theoriginal were carried out in tandem. Whatever final design ischosen the piezoelectric crystals must be characterised care-fully for optimal trapping. We tested the original device usinga Wayne-Kerr 6500b impedance analyser to locate the reso-nances of the transducers. Using the resonant frequency isvital to achieve maximum conversion of electrical to mechan-ical power. Having characterised the device, we carried outinitial tests using flour as a cheap substitute for micro-beads.The result was successful alignment of flour grains parallel tothe driven pair of transducers using a frequency of 6.915MHz,as shown in Fig. 2. The larger clumps of flour were beyondthe capacity of the device to trap but the smaller particles areseen aligned. These tests allowed us to gain experience withthe Olympus SZX-16 microscope being used for optical ob-servations.
When developing a new device, the first decision waswhether to locate the transducers within the fluid medium,for best transmission of acoustic energy, or outside the fluidchamber for ease of sterilisation. It was decided that sepa-rating the fluid and transducers would make sterilisation sim-
4
FIG. 2: Flour-water suspension aligned using the initial device.The thin lines of flour formed when the transducers were driven at6.915MHz and 7.5 Vpp while the larger clumps were unaffected.
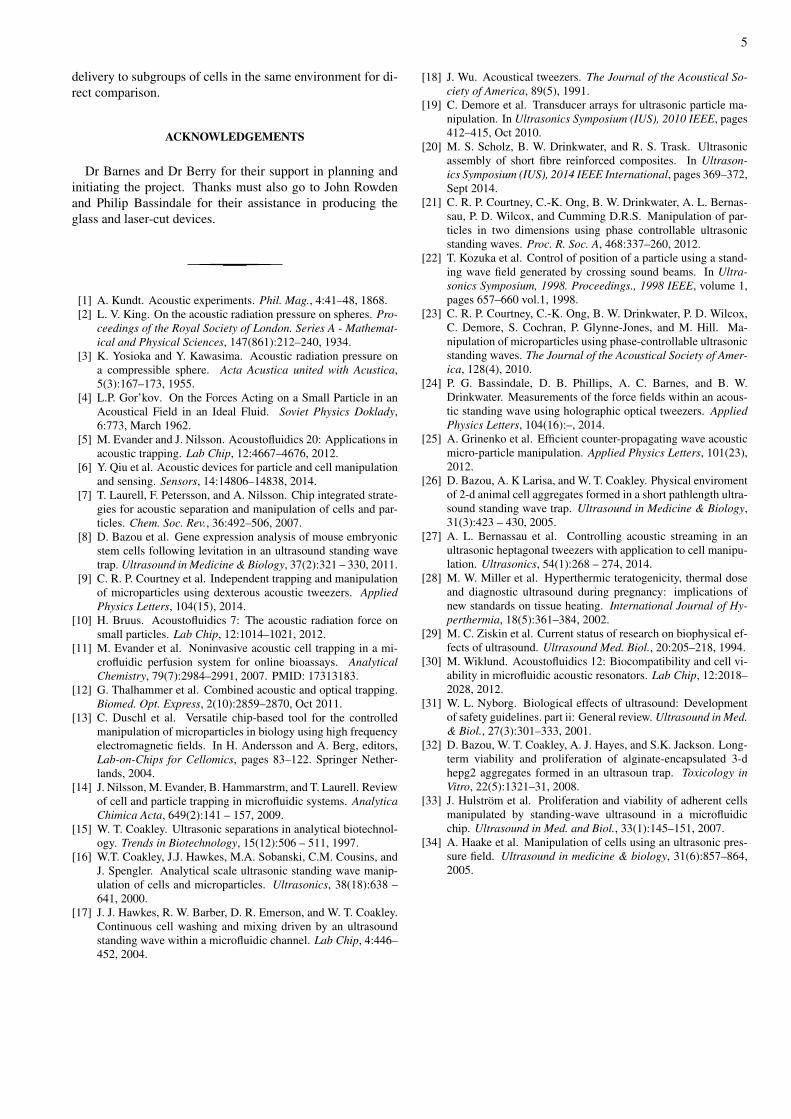
pler. Our first test–bed device, shown in Fig. 4 is based onthe work of Scholz et al., with a smaller fluid chamber[20].It uses two opposed transducers and a central, square fluidchamber mounted on a standard microscope slide using sili-cone glue. It is hoped future iterations will provide phase con-trol of individual transducers for 1D manipulation and even-tually introduce an additional pair of transducers for 2D ma-nipulation. The transducers will be held in position either us-ing 3D printed x-shaped mounts, as in Fig. 4, or small com-pression springs. Initial working sketches of a second gen-eration device are shown in Fig.5 The first generation de-vice has been produced in polymethyl methacrylate (PMMA)acrylic and glass to test the acoustic properties of both mate-rials. This involved producing 3D models of the device forlaser and water cutting. The water cutting was carried out inthe university workshops as it required specialist equipment.The laser cutting took place on the student-accessible device
FIG. 3: The two initial devices - the upper is cut in glass, the lowerin acrylic.
FIG. 4: Schematic diagram of the new device, all dimensions arein mm. The position of one mounted transducer is shown in blue,the 3D printed mount in orange. The finished device will have asymmetrical pair.
FIG. 5: Proposed layout for a device with two opposed pairs of trans-ducers - the dimensions are currently the same as for the first iterationdevice.
in the engineering department. With the help of Philip Bassin-dale we learned to program this ourselves and will be able toproduce future designs without assistance. The glass devicehas grooves cut for power supplies and we will add these tothe acrylic device before testing. With the transducers outsidethe fluid chamber a coupling medium will be needed betweenthe transducer and the container. Initial tests will use commer-cially available EE1295 ultrasound gel, since this is designedto impedance match water–dominated tissue and our fluid willbe water based.
We will be working with human epithelial and corneal cellswhich require containment level 1 procedures. The necessarytraining is being provided by Dr Berry. We hope to be ableto produce our own cell cultures and suspensions of desiredconcentrations for cell studies. Initial tests will be carried outusing fixed, dyed cells of the same type as will be used livelater in the project.
CONCLUSION
The potential of acoustic manipulation of live cells has beenwell–established. Opposing transducer methods have beenused relatively little in biophysics but engineering applicationshave shown them to have the precision and power required forhandling live cells. Non-contact manipulation of cells in thisway has the potential to provide targeted signalling molecule
5
delivery to subgroups of cells in the same environment for di-rect comparison.
ACKNOWLEDGEMENTS
Dr Barnes and Dr Berry for their support in planning andinitiating the project. Thanks must also go to John Rowdenand Philip Bassindale for their assistance in producing theglass and laser-cut devices.
[1] A. Kundt. Acoustic experiments. Phil. Mag., 4:41–48, 1868.[2] L. V. King. On the acoustic radiation pressure on spheres. Pro-
ceedings of the Royal Society of London. Series A - Mathemat-ical and Physical Sciences, 147(861):212–240, 1934.
[3] K. Yosioka and Y. Kawasima. Acoustic radiation pressure ona compressible sphere. Acta Acustica united with Acustica,5(3):167–173, 1955.
[4] L.P. Gor’kov. On the Forces Acting on a Small Particle in anAcoustical Field in an Ideal Fluid. Soviet Physics Doklady,6:773, March 1962.
[5] M. Evander and J. Nilsson. Acoustofluidics 20: Applications inacoustic trapping. Lab Chip, 12:4667–4676, 2012.
[6] Y. Qiu et al. Acoustic devices for particle and cell manipulationand sensing. Sensors, 14:14806–14838, 2014.
[7] T. Laurell, F. Petersson, and A. Nilsson. Chip integrated strate-gies for acoustic separation and manipulation of cells and par-ticles. Chem. Soc. Rev., 36:492–506, 2007.
[8] D. Bazou et al. Gene expression analysis of mouse embryonicstem cells following levitation in an ultrasound standing wavetrap. Ultrasound in Medicine & Biology, 37(2):321 – 330, 2011.
[9] C. R. P. Courtney et al. Independent trapping and manipulationof microparticles using dexterous acoustic tweezers. AppliedPhysics Letters, 104(15), 2014.
[10] H. Bruus. Acoustofluidics 7: The acoustic radiation force onsmall particles. Lab Chip, 12:1014–1021, 2012.
[11] M. Evander et al. Noninvasive acoustic cell trapping in a mi-crofluidic perfusion system for online bioassays. AnalyticalChemistry, 79(7):2984–2991, 2007. PMID: 17313183.
[12] G. Thalhammer et al. Combined acoustic and optical trapping.Biomed. Opt. Express, 2(10):2859–2870, Oct 2011.
[13] C. Duschl et al. Versatile chip-based tool for the controlledmanipulation of microparticles in biology using high frequencyelectromagnetic fields. In H. Andersson and A. Berg, editors,Lab-on-Chips for Cellomics, pages 83–122. Springer Nether-lands, 2004.
[14] J. Nilsson, M. Evander, B. Hammarstrm, and T. Laurell. Reviewof cell and particle trapping in microfluidic systems. AnalyticaChimica Acta, 649(2):141 – 157, 2009.
[15] W. T. Coakley. Ultrasonic separations in analytical biotechnol-ogy. Trends in Biotechnology, 15(12):506 – 511, 1997.
[16] W.T. Coakley, J.J. Hawkes, M.A. Sobanski, C.M. Cousins, andJ. Spengler. Analytical scale ultrasonic standing wave manip-ulation of cells and microparticles. Ultrasonics, 38(18):638 –641, 2000.
[17] J. J. Hawkes, R. W. Barber, D. R. Emerson, and W. T. Coakley.Continuous cell washing and mixing driven by an ultrasoundstanding wave within a microfluidic channel. Lab Chip, 4:446–452, 2004.
[18] J. Wu. Acoustical tweezers. The Journal of the Acoustical So-ciety of America, 89(5), 1991.
[19] C. Demore et al. Transducer arrays for ultrasonic particle ma-nipulation. In Ultrasonics Symposium (IUS), 2010 IEEE, pages412–415, Oct 2010.
[20] M. S. Scholz, B. W. Drinkwater, and R. S. Trask. Ultrasonicassembly of short fibre reinforced composites. In Ultrason-ics Symposium (IUS), 2014 IEEE International, pages 369–372,Sept 2014.
[21] C. R. P. Courtney, C.-K. Ong, B. W. Drinkwater, A. L. Bernas-sau, P. D. Wilcox, and Cumming D.R.S. Manipulation of par-ticles in two dimensions using phase controllable ultrasonicstanding waves. Proc. R. Soc. A, 468:337–260, 2012.
[22] T. Kozuka et al. Control of position of a particle using a stand-ing wave field generated by crossing sound beams. In Ultra-sonics Symposium, 1998. Proceedings., 1998 IEEE, volume 1,pages 657–660 vol.1, 1998.
[23] C. R. P. Courtney, C.-K. Ong, B. W. Drinkwater, P. D. Wilcox,C. Demore, S. Cochran, P. Glynne-Jones, and M. Hill. Ma-nipulation of microparticles using phase-controllable ultrasonicstanding waves. The Journal of the Acoustical Society of Amer-ica, 128(4), 2010.
[24] P. G. Bassindale, D. B. Phillips, A. C. Barnes, and B. W.Drinkwater. Measurements of the force fields within an acous-tic standing wave using holographic optical tweezers. AppliedPhysics Letters, 104(16):–, 2014.
[25] A. Grinenko et al. Efficient counter-propagating wave acousticmicro-particle manipulation. Applied Physics Letters, 101(23),2012.
[26] D. Bazou, A. K Larisa, and W. T. Coakley. Physical enviromentof 2-d animal cell aggregates formed in a short pathlength ultra-sound standing wave trap. Ultrasound in Medicine & Biology,31(3):423 – 430, 2005.
[27] A. L. Bernassau et al. Controlling acoustic streaming in anultrasonic heptagonal tweezers with application to cell manipu-lation. Ultrasonics, 54(1):268 – 274, 2014.
[28] M. W. Miller et al. Hyperthermic teratogenicity, thermal doseand diagnostic ultrasound during pregnancy: implications ofnew standards on tissue heating. International Journal of Hy-perthermia, 18(5):361–384, 2002.
[29] M. C. Ziskin et al. Current status of research on biophysical ef-fects of ultrasound. Ultrasound Med. Biol., 20:205–218, 1994.
[30] M. Wiklund. Acoustofluidics 12: Biocompatibility and cell vi-ability in microfluidic acoustic resonators. Lab Chip, 12:2018–2028, 2012.
[31] W. L. Nyborg. Biological effects of ultrasound: Developmentof safety guidelines. part ii: General review. Ultrasound in Med.& Biol., 27(3):301–333, 2001.
[32] D. Bazou, W. T. Coakley, A. J. Hayes, and S.K. Jackson. Long-term viability and proliferation of alginate-encapsulated 3-dhepg2 aggregates formed in an ultrasoun trap. Toxicology inVitro, 22(5):1321–31, 2008.
[33] J. Hulstrom et al. Proliferation and viability of adherent cellsmanipulated by standing-wave ultrasound in a microfluidicchip. Ultrasound in Med. and Biol., 33(1):145–151, 2007.
[34] A. Haake et al. Manipulation of cells using an ultrasonic pres-sure field. Ultrasound in medicine & biology, 31(6):857–864,2005.





























