Embed Size (px)
DESCRIPTION
paper fuzzy supervised
Citation preview

Fuzzy-Supervised PID Control: Experimental Results
Mariagrazia Dotoli, Bruno Maione, Biagio TurchianoPolitecnico di Bari, Dipartimento di Elettrotecnica ed Elettronica
Via Re David, 200, I-70125 Bari, ItalyPhone: +39-080-5963312, Fax +39-080-5963410
email:{dotoli, maione, turchiano}@poliba.it
ABSTRACT: We present some results about the design and implementation of a fuzzy supervised PID controller for aflow rate process. Since the process is quite nonlinear, a fixed tuning of the PID algorithm cannot guarantee goodperformances for any operating condition. We suggest the use of a fuzzy supervisor that modifies the PID tuning on-line, depending on the set point, the error and the actual control action. First, a simplified fuzzy supervisor with only theset point as an input is designed on the basis of the responses with an unsupervised and optimized PID to different setpoints. Afterwards, the fuzzy rule base is modified and refined introducing two additional inputs: the error and controlaction. The control strategy is implemented in a C/C++ software module, including a user-friendly graphical userinterface (GUI). Results are fully analyzed and discussed in comparison with traditional PID algorithms.
KEYWORDS: Adaptive control, PID control, fuzzy supervisor, non linear system.
INTRODUCTION
Most industrial processes exhibit highly nonlinear dynamics but are nevertheless controlled with the classical PID lineartechnique, a widespread methodology with the advantage of few parameters to tune according to established guidelines.However, the use of the PID linear technique in the control of a nonlinear process makes the tuning configurationstrongly dependent on the particular steady-state working condition. Thus, a fixed tuning of the PID algorithm cannotguarantee good system performances for any operating point. A methodology overcoming this limitation is ahierarchical control strategy, consisting of a fuzzy supervisor and of the PID controller itself: the fuzzy supervisormodifies the PID tuning on-line, according to rules with one or more input variables, usually the set point, the errorand/or the actual control action. Together with adaptivity, the foremost advantages of this control strategy are the abilityto cope with incomplete knowledge of the process and to provide smooth transitions from an operating region toanother. We remark that the last two characteristics do not apply to conventional gain scheduling or CGS (fuzzysupervision of PIDs is often referred to in literature as fuzzy gain scheduling or FGS), for the simple reason that CGS,unlike FGS, is not rule-based. For further insights on fuzzy supervision of a PID controller and its theoretical aspectssee [1], [2], [4], [5].In this paper we discuss the design and implementation of a fuzzy supervised PID controller for a common industrialprocess, a flow-rate plant, and present some experimental results. The system is very non linear, includes hysteresis andsaturation effects and its model is unknown. A PID controller is easily tuned applying the well-known Ziegler-Nicholstechnique, but it is reliable only when the system works at the designed operating condition. Hence the use of asupervisor where fuzzy techniques make it possible to model human operator knowledge and cope with the lack ofinformation on the system model. An interesting additional feature of the fuzzy supervisor is its ability to generatenonlinear control laws with various degrees of freedom.The paper is organized as follows: in the first section the case study is described, in the subsequent section the controllerdesign is explained and discussed upon and in the third section the controller is evaluated by analyzing experimentalresults and discussing them in comparison with traditional PID algorithms. Finally, the paper is concluded with adiscussion of the advantages and drawbacks of the method, and suggestions for further research are given.
CASE STUDY: FLOW RATE CONTROL
The flow-rate process examined in this paper is a laboratory equipment consisting of a tank containing water, a pumpdriven by a dc-motor, an electronic valve and a flow rate transducer (Figure 1). The pump fishes water out of the tank

Pump
Electrovalve
Flow
and sends it to the electronic valve via a manualthrottle that can introduce a disturbance in thecontrol loop. The proportional-action electronicvalve is the control actuator and the flowmetermeasures the flow-rate supplying a proportionalvoltage signal. The fluid ends up into a reservoirconnected to the tank. The system exhibitsseveral nonlinear features: the flowmeter islinear in a limited flowrate range, theelectrovalve exhibits hysteresis and the actuatoris affected by saturation. The nonlinearitiesmake the task of controlling the flow-ratestrongly dependent on the operating conditionand, in particular, on the setpoint, an inputvoltage ranging from 0.6V to 7 V. Despite the above nonlinearities, it is relatively easy to tune a linear PID controllerworking at a specific operating condition, i.e. when the input voltage matches the designed value; on the contrary, ifsuch a PID is employed in a condition different from the designed one, the system performances deteriorate.
CONTROLLER DESIGN
In order to make the PIDreliable at every operatingcondition, we design afuzzy supervisor for thePID.The digital control loop isreported in Figure 2. Thefuzzy supervisor has threeinputs: the reference x(t),the error e(t) and thecontrol action u(t). Themain input to thesupervisor is x(t), since theset point extensivelyaffects the PID controlledsystem, as explained in the previous section. We employ the additional inputs e(t) and u(t), providing additionalinformation to the supervisor about the system steady state precision and response speed. For the sake of simplicity weuse triangular and trapezoidal membership functions (MFs) for the input variables. Clearly, the supervisor outputs arethe PID parameters: the proportional gain Kp, the integral time constant Ti and the derivative time constant Td. Theoutput MFs are singletons. The inference method chosen is the classical max-min and the defuzzification method is thecentroid technique [3].The fuzzy supervisor is designed as follows. Using the well-known Ziegler-Nichols technique, several optimalconfigurations of the PID parameters are obtained, each corresponding to a particular operating condition or set pointvalue and to an ‘optimal’ response (for thatoperating point). A tuning table recording thePID parameters is thus produced. On thebasis of such a table, a simplified fuzzysupervisor with the set point as a single inputis designed, with rules of the kind “If x(t) isbig then Kp is big” and similar for the othertwo supervisor outputs. Afterwards, the fuzzyrule base is modified taking into accountadditional information from two furtherinputs, i.e. error and actual control action.The resulting set of rules is subsequentlyrefined performing several experiments andcomparing the following performanceindices: rise, delay and settling time, Integral
Figure 1: Flow rate control process.
Figure 2: Digital control loop.
-
+S
H
ADC DAC
FuzzySupervisor
ADC
x(t) e(t) PIDalgorithm
Kp Td Ti
y(t)u(t)
Figure 3: Graphical user interface.

Time Absolute Error (ITAE) and overshoot. The control strategy is implemented in a software module written inC/C++, including the controller and a user-friendly graphical user interface (GUI), reported in Figure 3. The systemresponse and performance are also reported in the GUI (see Figures 4 and 5 for an example with an unsupervised PID).Additionally, the fuzzy variables and rules can be easily edited and modified from the GUI (Figures 6 and 7).
CONTROLLER EVALUATION: EXPERIMENTAL RESULTS
Two sets of tests were performed, the first at a “high” setpoint values, e.g. 6 V, the second at a “low” values, e.g. 1.8 V.In each set of tests we compared the optimal unsupervised PID, designed for that specific operating condition, with thefuzzy supervised PID. In both cases the fuzzy supervisor emulated perfectly well the optimal PID, as can be remarked
Figure 7: Example of fuzzy rules.Figure 6: Example of fuzzy variable.
Figure 4: Example of PID system response. Figure 5: Performance report.

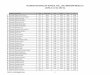
observing the system responses in Figures 8 and 9. It is also to note that in the experiments the fuzzy supervisor wastuned automatically and compared to an unsupervised PID previously optimized. Nevertheless, the responses with thefuzzy supervisor are comparable to those obtained with the optimal PID, with even slightly better performance indices(compare the first and second lines of results both in Tables I and II). To fully exhibit the benefits of the proposedapproach, the third lines in Tables I and II report the performance indices obtained using a non optimal unsupervisedPID. In particular, in the third line of Table I (Table II) the PID is tuned with the optimal parameters for a set point of1.8 V (6.0 V), while the set point really applied is 6.0 V (1.8 V). Note that a non optimal unsupervised PID leads todegraded responses. In other words, the unsupervised PID clearly fails when not employed at the operating condition itis designed for, especially at low set points (see the third line of results both in Tables I and II).
Settling times
Test typeProportionalgain (finalfor fuzzy)
Integraltime
constant(final for
fuzzy)
Derivativetime
constant(final for
fuzzy)
ITAE10s Overshoot Rise
timeDelaytime 5% 10%
Optimal unsupervisedPID (tuned at 6.0 V) 1.50 0.280 1.159 12.97 0% 1.60 1.21 3.25 2.81
Fuzzy supervised PID 1.50 0.276 1.159 12.28 0% 1.49 1.27 3.14 2.75
Non optimal unsupervisedPID (tuned at 1.8 V) 1.28 0.135 1.133 23.81 8.4% 1.32 1.21 8.91 2.53
Table I: Results of tests with unsupervised and fuzzy supervised PID for 6.0 V set point.
Settling timesTest type
Proportionalgain (finalfor fuzzy)
Integraltime
constant(final for
fuzzy)
Derivativetime
constant(final for
fuzzy)
ITAE10s Overshoot Rise
timeDelaytime
5% 10%
Optimal unsupervisedPID (tuned at 1.8 V) 1.28 0.135 1.133 3.71 0% 2.37 0.83 3.52 3.03
Fuzzy supervised PID 0.95 0.149 0.990 6.24 0% 2.31 0.83 3.36 3.03
Non optimal unsupervisedPID (tuned at 6.0 V) 1.50 0.280 1.159 7.49 14% 0.77 0.72 4.29 3.91
Table II: Results of tests with unsupervised and fuzzy supervised PID for 1.8 V set point.
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
8
Time [s]
x(t),
y(t)
, e(t)
, u(t)
[V]
Control action
Setpoint
Error
Fuzzy sup. PID
Optimal unsup. PID
Non optimal unsup. PID
Figure 8: Comparison of fuzzy supervised andunsupervised PID with 6.0 V set point.
Figure 9: Comparison of fuzzy supervised andunsupervised PID with 1.8 V set point.
0 1 2 3 4 5 6 7 8 9 10-1
0
1
2
3
4
5
6
7
8
Time [s]
x(t),
y(t)
, e(t)
, u(t)
[V] Control action
Setpoint
Error
Fuzzy sup. PID
Optimal unsup. PID
Non optimal unsup. PID

CONCLUSIONS
We applied a fuzzy supervised PID controller to a flow-rate process. Several experimental evidences showed theeffectiveness of the proposed schema in guaranteeing a good performance in any operating condition. Such results werefully analyzed and discussed in comparison with traditional PID algorithms. Specifically, the unsupervised andsupervised configurations resulted in similar dynamics for all values of the set point. It is to be remarked that in theexperiments performed the fuzzy supervisor was tuned automatically and compared to an unsupervised PID previouslyoptimized. In conclusion, advantages of the proposed method are the fuzzy-supervised PID adaptivity to differentoperating conditions, the preservation of the performance standards, the high computational speed and the linguisticapproach to the supervision. An interesting additional feature of the fuzzy supervisor is its ability to generate nonlinearcontrol laws with various degrees of freedom. The main disadvantage is tuning its many parameters, which is notstraightforward and requires a considerable process knowledge from the designer.
ACKNOWLEDGMENTS
The authors wish to thank Mr. Berardo Sciscio for his kind help in the development of the software module and Mr.Paolo Lino for his valuable assistance in the collection and evaluation of the experimental data.
REFERENCES
[1] Babuška, R., Braake, te, H.A.B., Can, van, H.J.L., Krijgsman, A.J., Verbruggen, H.B., 1996, “Comparison ofIntelligent Control Schemes for Real-Time Pressure Control”, Control Engineering Practice, Vol. 4, pp. 1585 -1592.
[2] Blanchett, T.P., Kember, G.C., Dubay, R., 2000, “PID Gain Scheduling Using Fuzzy Logic”, ISA Transactions,Vol. 39, pp. 317 - 325.
[3] Jantzen, J., 1998, “Design of Fuzzy Controllers”, Technical report N. 98-E-864, Danmarks Tekniske Universitet,Lyngby.
[4] Ketata, R., Geest, De, D., Titli, A., 1995, “Fuzzy Controller: Design, Evaluation, Parallel and HierarchicalCombination with a PID Controller”, Fuzzy Sets and Systems, Vol. 71, pp. 113 - 129.
[5] Zumberge, J., Passino, K.M., 1998, “A Case Study in Intelligent vs. Conventional Control for a Process ControlExperiment”, Control Engineering Practice, Vol. 6, pp. 1055 - 1075.