Embed Size (px)
Citation preview

DIPLOMA IN Mechnical Engineering
2011-2012
Mr.Vaibhav V Naik
Mechanical Engineering
2011-2012
FUNDAMENTALS AND TYPE OF MECHANISM

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
FUNDAMENTALS AND TYPES OF MECHANISMS
A. Kinematics of Machines: - Definition of Kinematics, Dynamics,
Statics, Kinetics, Kinematic link, Kinematic Pair and its types,
constrained motion and its types, Kinematic chain and its types,
Mechanism, inversion, machine and structure. (Marks- 6)
B. Inversions of Kinematic Chain. (Marks- 8)
Inversion of four bar chain,
Coupled wheels of Locomotive &
Pentograph.
Inversion of Single Slider Crank chain-
Rotary I.C. Engines mechanism,
Whitworth quick return mechanism,
Crank and Slotted lever quick return mechanism.
Inversion of Double Slider Crank Chain
Scotch Yoke Mechanism &
Oldham’s Coupling.
C. Common Mechanisms. (Marks- 4)
Bicycle free wheel Sprocket mechanism.
Geneva Mechanism.
Ackerman’s Steering gear mechanism.
Foot operated air pump mechanism.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
THEORY OF MACHINE
Theory of machine is Branch of engineering science which deals with the
study of relative motion and forces between the various machine elements
:
Figure: Diagram of Theory of Machine
1. Statics
It is the branch of theory of machine, which deals with the forces and its effect on the machine part while the latter is at rest.
2. Dynamics of machine
It is the branch of theory of machine, which deals with the forces and
effect of forces on the machine component when they act on them.
3. Kinetics
It is the branch of theory of machine, which deals with the inertia forces,
which are formed due to combined action of mass and motion of
machine elements.
4. Kinematics of machine
It is the branch of theory of machine, which deals with the relative motion
between the various parts of the machine, without considering the forces
THEORY OF MACHINE
KINEMATICS DYNAMICS KINETICS STATICS

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
1. Kinematic Link
a. Links are individual parts of a mechanism. b. Each parts of a machine which has a relative motion to some other parts is
known as Kinematic link. Characteristics of the Kinematic link
1. It should have relative motion and
2. It should be a resistant body
Classification of the LINK
A. Depending upon the nature of the resistant bodies
1. Rigid link.
2. Flexible link.
3. Fluid link.
B. Depending upon the points at which the link is attached to mechanism 1. Binary link
2. Ternary link
3. Quaternary link

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
A. Depending upon the nature of the resistant bodies 1. Rigid link
The links which do not undergo appreciable transformation while transmitting
the required motion and forces is known as rigid link.
Example:
a. Piston,
b. Connecting Rod of Steam engine.
2. Flexible Link
The links which are partly deformed transformation while transmitting the
required motion and forces in such a way that they don effect the required
transmission of motion is known as Flexible link.
Example:
a. Chain,
b. Belt and Spring
3. Fluid Link
The link which transmit the motion by fluid pressure as compression are
called fluid link.
Example:
a. Liquid used in Hydraulic presses

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
B. Depending upon the points at which the link is attached to mechanism 1. Binary link
The link which is attached to two points in the mechanism is called Binary
link.
2. Ternary link The link which is attached to three points in the mechanism is called Ternary
link.
3. Quaternary link The link which is attached to four points in the mechanism is called
Quaternary link.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. Kinematic Pair
The two links of the machine when in contact with each other are said to
form a pair if the relative motion between them is successfully constrained.
CLASSIFICATION OF KINEMATIC PAIR A. According to the relative motion between them
1. Sliding pair. S
2. Turning pair.
3. Rolling pair.
4. Screw pair.
5. Spherical pair.
B. According to Nature of the contact
1. Lower pair.
2. Higher pair.
C. According to type of closure
1. Self closed pair.
2. Force closed pair.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
A. According to the relative motion between them
1. Sliding pair.
A sliding pair is said to be formed by two links such a manner that one link is
constrained to have a sliding motion relative to other link.
Example:
1. Piston and Cylinder,
2. Cross head and guides of Steam engine.
Figure: Sliding Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. Turning pair
A turning pair is said to be formed by two links such a manner that one link is
constrained to turn or revolve relative to other link.
Example:
Shaft with collar in circular hole.
Figure: Turning Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. Rolling pair.
A Rolling pair is said to be formed by two links such a manner that one link is
constrained to have a rolling motion over the other link.
Example:
Ball bearing forms Rolling pair.
Figure: Rolling Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
4. Screw pair.
When the two elements of pairs are connected in such a way that one
element can turn about the other by means of screw threads is known as
Screw Pair.
Example:
Bolt and nut is example of Screw Pair.
Figure: Screw Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
5. Spherical pair.
When the two elements of pairs are connected in such a way that one
element turn or swivels about the other fixed element, the pair formed is
known as Screw Pair.
Example:
Ball and socket is example of Spherical Pair.
Figure:Spherical Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
B. According to Nature of the contact 1. Lower pair.
When the two element of a pair have a surface contact when the relative
motion takes place and the surface of one element slides over the other, the
pair forced is known as lower pair.
Example:
a. The motion of piston and cylinder in the engine.
b. Shaft rotating in a bearing and
c. Nut turning on a screw.
Figure: Lower Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. Higher pair.
When the two element of a pair have a line or point contact when the
relative motion takes place and the motion between the two element is
partially turning and partly sliding then the pair formed is know as Higher
pair.
Example:
The motion of cam and follower
Figure: Higher Pair

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
C. Kinematic pairs according to nature of mechanical constraint 1. Self Closed pair
When the elements of a pair are held together mechanically in such a way
that only the required kind of relative motion occurs , all the lower pairs and
some of the higher pairs are closed pairs.
Example:
The lower pair is known as closed pair.
2. Force Closed pair or Unclosed pair
When two links of a pair are not connected mechanically but kept in contact
either due to force of gravity or some spring action, they constitute an
unclosed pairs.
Example:
The motion of cam and follower

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
TYPE OF CONSTARINED MOTIONS. 1. Completely constrained motion.
2. Incompletely constrained motion.
3. Successfully constrained motion.
1. Completely constrained motion.
When the motion between a pair is limited to definite direction irrespective of
the direction of force applied, then the motion is said to be a completely
constrained motion.
Example:
1. The motion of the square bar in square hole.
2. The motion of shaft with collars at each end in a circular hole.
Figure: Complete Constrained Motion

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. Incompletely constrained motion.
When the motion between a pair can take place in more than one direction,
then the motion is said to be a completely constrained motion.
Example:
1. The motion of the circular bar in circular hole.
Figure: Incomplete Constrained Motion

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. Successfully constrained motion
When the relative motion between the link is not completely constrained by
itself but it is made by some other means is called successfully constrained
motion.
Example:
1. Shaft in Footstep Bearing
2. The motion IC engine valve and piston in reciprocating inside an engine
cylinder.
Figure: Successfully Constrained Motion

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. Kinematic Chain
When the kinematic pairs are coupled in such a way that the last linked is
joined the first link to transmit the definite motion it is called a kinematic chain.
To determine the given assemblage of links forms the kinematic chain
or not:
The two equations are:
1. l = 2p - 4
2. J = 3/2 * l - 2
l = number of links
p = number of pairs
j = number of joints
Three possible cases are
1. If L.H.S=R.H.S then it is Constrained kinematic chain
2. If L.H.S>R.H.S then it is Locked Chain
3. If L.H.S<R.H.S then it is Unconstrained kinematic chain

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
1. Arrangement of three links
2. Arrangement of four links
Figure :Three Links
Figure :Four Links

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. Arrangement of five links
4. Arrangement of six links
Figure :Five Links
Figure :Sic Links

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Types of Joints in the Chain
1. Binary joints
When the two links are joined at the same connections, the joint is known
as binary joint
W.Klien’s criterion of constraint
l = number of links
h = number of higher pairs
j = number of binary joints
j=4; l=4; h=0
j+h/2 = 3/2*l - 2
4+0 = 3/2*4 - 2
4 = 4
L.H.S=R.H.S
Figure: Binary Joints

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. Ternary Joints
When the three links are joined at the same connections, the joint is
known as ternary joints.
A.W.Klien’s criterion of constraint
l = number of links
h = number of higher pairs
j = number of binary joints
j=7; l=6; h=0 j+h/2 =3/2*l – 2 7+0 =3/2*6 – 2 7 =7 L.H.S=R.H.S
Figure: Ternary Joints

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. Quaternary Joints
When the four links are joined at the same connections, the joint is known
as Quaternary joints.
W.Klien’s criterion of constraint
l = number of links
h = number of higher pairs
j = number of binary joints
j=12; l=9; h=0
j+h/2 = 3/2*l – 2
12+0 = 3/2*9 – 2
12 = 11.5
L.H.S>R.H.S
Figure: Quaternary Joints

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Types of Kinematic chain
1. Four bar chain
2. Single slider crank chain.
3. Double slider crank chain
Inversion of the following types 1. Four bar chain
a) Beam engine.
b) Coupling rod of Locomotives.
c) Watts’ indicator mechanism.
d) Pantograph.
2. Single slider crank chain.
a) Pendulum pump or Bull engine.
b) Oscillating cylinder engine.
c) Rotary IC engine.
d) Crank and slotted lever quick return mechanism.
e) With worth quick return mechanism.
3. Double slider crank chain.
a) Elliptical trammel
b) Scotch yoke mechanism.
c) Oldham’s coupling.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. MECHANISM
a. When one of the links of a kinematic chain is fixed, the chain is known as
mechanism.
b. It may be used for transmitting or transforming motion.
Example:
1. Engine indicator,
2. Typewriter.
Types of Mechanism
a. Simple mechanism (a mechanism with four links)
b. Compound mechanism (a mechanism with more than four link)
Differentiate between Machine and Mechanism
NO
MACHINE
MECHANISM
1. It is like the human body, it transforms energy into useful work.
It is like a frame work and has a definite motion between various links.
2 It relates to energy only.
It relates to motion.
3 It has many link.
It also has many links.
4 Ex: lathe, shaper.
Ex. watt indicator,typwriter
5

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
4. Structure
It is the assemblage of a number of resistant bodies having no relative motion
between then and meant for carrying loads having a straining action.
Example:
1. A Railway bridge.
2. Roof Trusses
3. bridges,
4. buildings
5. machine frames
Figure: Structure

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Differentiate between Machine and Structure.
NO
MACHINE
STRUCTURE
1 Has relative motion between the members
Has no relative motion
2 Transforms available energy into possible work.
Does not transform.
3 Members are meant to transmit motion and forces.
Members are meant to accept load
4 Example Shaper, lathe Example :Bridge.
5. Inversion
The method of obtaining the different mechanism by fixing the different links in
a kinematic chain is known as inversion of the mechanism.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Important Terminologies and Definition 1. Machine
It is device which takes in the available energy and converts it into useful work.
When the mechanism is required to transmit the power or to do some particular type of work, it then becomes a Machine.
Example: Shaper, Lathe machine 2. Mechanics( Theory of Machine)
Branch of engineering which deals with the relative motion and forces
between the various machine elements.
Kinematics of machine
Deals with the relative motion without considering the forces
Dynamics of machine
Deals with the forces and effect of forces on the machine component
when they act on them.
3. Kinetics of machine
Deals with the forces, which are formed due to combined action of mass and motion of machine elements.
4. Statics
Deals with the forces and its effect on the machine part while the latter is at rest.
5. Resistant body A
body is said to be resistant body if it is able to transmit the forces with the
least possible deformation.
Example: spring, belt oils in hydraulic presses
6. Kinematic Link
Links are individual parts of a mechanism.
Each parts of a machine which has a relative motion to some other parts is known as Kinematic link.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
7. Kinematic Chain
When the kinematic pairs are coupled in such a way that the last linked is joined the first link to transmit the definite motion it is called a kinematic chain.
8. Kinematic Pair
The two links of the machine when in contact with each other are said to form a pair if the relative motion between them is successfully constrained.
9. Inversion
The method of obtaining the different mechanism by fixing the different links in a kinematic chain is known as inversion of the mechanism.
10. Structure
It is the assemblage of a number of resistant bodies having no relative motion between then and meant for carrying loads having a straining action. Example: a railway bridge.
11. Mechanism
When one of the links of a kinematic chain is fixed, the chain is known as
mechanism.
It may be used for transmitting or transforming motion.
Example: Engine indicator, Typewriter.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Grashof's Law The sum of the length of shortest and longest link must be equal or less
than the sum of the length of the other two link length, if there is to be a
continuous relative motion between the two links.
According to Grashofs law
s + l < p + q
l = length of the longest link.
s = length of the shortest link.
p & q = length of the other two
links
In a four-bar linkage, we refer to the line segment between hinges on a given link
as a bar where:
s = length of shortest bar
l = length of longest bar
p, q = lengths of intermediate bar
Grashof's theorem states that a four-bar mechanism has at least one revolving
link if
s + l <= p + q (1) and all three mobile links will rock if
s + l > p + q (2)
The inequality (1) is Grashof's criteria
The Link opposite to the frame is called Coupler Link and the link which are
hinged to the frame are called side link.
The link which is free to rotate through 3600 with respect to second link will be
said to revolve relative to the second link (not necessarily a frame).

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
If it is possible for all four bar to become simultaneously aligned, such a state
is called change point.
From the table we can see that for a mechanism to have a crank, the sum of the
length of shortest and longest link must be equal or less than the sum of the
length of the other two link.
However this condition is necessary but not sufficient. Mechanism satisfying this
condition falls into following three categories.
1) When the shortest link is the side link, the mechanism is crank rocker
mechanism. The shortest link is the CRANK in the mechanism.
2) When the shortest link is the Frame, the mechanism is double crank
mechanism.
3) When the shortest link is the coupler link, the mechanism is Double rocker
mechanism
Case
Criterion
Shortest link Category
1 s+l < p+q
frame double crank
2 s+l < p+q
slide crank rocker
3 s+l < p+q
coupler double rocker
4 s+l = p+q
any change point
5 s+l < p+q
any triple rocker

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
Inversion of the following types
1. Four bar chain
a. Beam engine.
b. Coupling rod of Locomotives.
c. Watts’ indicator mechanism.
d. Pantograph.
2. Single slider crank chain.
a. Pendulum pump or Bull engine.
b. Oscillating cylinder engine.
c. Rotary IC engine.
d. Crank and slotted lever quick return mechanism.
e. Whit worth quick return mechanism.
3. Double slider crank chain.
a. Elliptical trammel
b. Scotch yoke mechanism.
c. Oldham’s coupling.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
INVERSION OF FOUR BAR CHAIN MECHANISM

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
a. BEAM ENGINE
1. Beam engine is also called as Crank and lever mechanism.
2. It consist of four link
a. Link A –Frame
b. Link AB –Crank
c. Link BC –Coupler
d. Link CE–Lever
3. In this mechanism, when the crank rotated about the fixed centre A,
the lever oscillates about the fixed center D.
4. The end E of the lever CDE is connected to piston rod which
reciprocates due to the rotation of the crank.
5. Purpose: Convert rotary motion into reciprocating motion.
Figure: Beam Engine

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
b. Coupling rod of locomotive
1. The coupling rod of the locomotive consists of four links as shown in figure.
2. It consist of four link
a. Link AD – frame
b. Link AB –crank
c. Link BC –connecting rod
d. Link CD–crank
3. In this mechanism, the link AD and BC act as crank and are connected to
the respective wheel.
4. The link CD act as a coupling rod and the link AB is fixed in order to
maintain a constrain motion between them.
5. Purpose: meant for transmitting rotary motion from one wheel to another
wheel.
Figure: Coupling Rod of locomotive

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
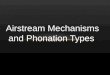
c. Watts indicator mechanism
A watt indicator mechanism has a four link as shown in figure.
1. The four links are fixed link at A, link AC, link CE, and link BFD.
2. It may be noted that BF and FD forms one link because two parts have no
relative motion between them.
3. The link CE and BFD act as lever.
4. The displacement of link BFD is directly proportional to the pressure of gas
or steam which acts on the indicator plunger.
5. On any small displacement of the mechanism, the tracing point E at the end
of the link CE traces out approximately straight line.
6. The initial position of the mechanism is shown in full line whereas the dotted
lines shows the position of mechanism when the gas or steam pressure acts
on the indicator plunger.
Figure: Watts Indicator Mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
d. Pantograph
A pantograph is an instrument used to reproduce an enlarged or reduce scale
and as exactly as possible the path described by a given point.
1. It is a based on four based kinematic chain.
2. It consists of jointed parallelogram ABCD.
3. It is made up of bar connected by turning pair. It has a four turning pair.
4. Link BA and BC are extended to O and E respectively such that
OA/OE = AD/BE.
5. For all relative position of bars the triangle OAD and OBE are similar and
the point O,D,E are in straight line.
6. The point E describes the same path as described by point D.
Figure: Pantograph

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
INVERSION OF SINGLE SLIDER CRANK CHAIN
MECHANISM
1. A single slider crank chain is modification of the basic four bar chain.
2. It consist
a. One Sliding pair and
b. Three Turning pair
3. Link 1 - Frame of engine;
Link 2 - Crank
Link 3 - Connecting rod
Link 4 - Cross head
4. As the crank rotates the cross head reciprocates in the guides and
thus the piston reciprocates in the cylinder
5. It is usually found in reciprocating steam engine mechanism.
6. This type of mechanism converts rotary motion into reciprocating
motion and vice versa
Figure: Single Slider Crank Chain Mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
a. Pendulum pump or Bull engine.
1. In this mechanism, the inversion is obtained by fixing the link 4 or cylinder
(sliding pair).
2. It consist of four link
a. Link 1 – Piston rod
b. Link 2 – AB-Crank
c. Link 3 -BC -connecting rod
d. Link 4 –Cylinder.
3. In this case, the crank rotates the connecting rod oscillates about the pin
pivoted to the fixed link.
4. The piston attached to the piston rod reciprocates inside the cylinder.
Figure: Pendulum pump or Bull engine

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
b. Oscillating cylinder engine.
1. In this mechanism, the inversion is obtained by fixing the link 3 or
connecting rod (turning pair).
2. It consist of four link
e. Link 1 -AB- Piston rod
f. Link 2 -BD-Crank
g. Link 3 -AD -Connecting rod
h. Link 4 –Cylinder.
3. The link 3 (AD-connecting rod) is corresponds to the connecting rod of the
reciprocating steam engine mechanism.
4. When the link 2 rotates (BD-Crank) rotates, the piston attached to the
piston rod reciprocates and the cylinder oscillates about the pin pivoted to
the fixed link at A.
Figure: Oscillating Cylinder Engine

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
d. Rotary IC engine.
1. In this mechanism, the inversion is obtained by fixing the link 2 or crank.
2. It consist of four link
a. Link 1 - Cylinder.
b. Link 2 -Fixed Crank
c. Link 3 -Piston
d. Link 4 – Connecting rod
3. The link 4 (AD-connecting rod) rotates, the piston reciprocates inside the
cylinder forming link1.
Figure: Rotary IC Engine

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
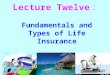
a. Crank and slotted lever quick return mechanism
1. In this mechanism, the inversion is obtained by fixing the link 3 or turning
pair.
2. It consist of four link
a. Link 1 -Slider
b. Link 2 – Driving Crank
c. Link 3 -Fixed link
d. Link 4 –Slotted lever or Slotted bar
3. The driving crank AC revolves with uniform angular speed about fixed
centre.
4. The sliding bock is attached to crank pin at A slides in the slotted bar AP
and thus causes AP to oscillate about the point A.
5. A short link PR transmits the motion from AP to the Ram to which the
cutting tool is fixed
6. The motion of the tool is constrained along the line produced
Figure: Crank and slotted lever quick return mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
b. Whitworth quick return mechanism.
1. In this mechanism, the inversion is obtained by fixing the link 3 or turning
pair.
2. It consist of four link
a. Link 1 -Slider
b. Link 2 - Crank
c. Link 3 -Fixed link
d. Link 4 –Slotted lever
3. The driving crank BC revolves with uniform angular speed about fixed
centre.
4. The sliding bock is attached to crank pin at B slides in the slotted bar AP
and thus causes AP to oscillate about the point A.
5. A short link PQ transmits the motion from AP to the Ram to which the
cutting tool is fixed
6. The motion of the tool is constrained along the line produced.
Figure: With worth Quick Return mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
INVERSION OF DOUBLE SLIDER CRANK CHAIN
MECHANISM
1. A kinematic chain which consists of two turning pair and two sliding
pair is called double slider crank chain.
2. It consist
a. Two Sliding pair and
b. Two Turning pair
3. The inversion of double slider crank chain mechanism are a. Elliptical trammel
b. Scotch yoke mechanism.
c. Oldham’s coupling.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
a. Elliptical trammel
1. In this mechanism, the inversion is obtained by fixing the link 4 or slotted
plate.
2. It consist of four link
a. Link 1 – Sliders
b. Link 2 – Bar
c. Link 3 – Sliders
d. Link 4 –Slotted Plate
3. The looted plate has two grooves cut in it at right angles to each other.
4. The link 1 and known as a sliders and form sliding pair with the link 4.
5. The link AB is a bar which forms the turning pair with the links 1 and link 3.
6. When the link 1 and link 3 slides along the respected grooves ,any point of
the link 2 such as point P traces out the ellipse on the surface.
Figure: Elliptical trammel

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
b. Scotch yoke mechanism.
1. In this mechanism, the inversion is obtained by fixing link 1 or link3.
2. It consist of four link
e. Link 1 – Fixed Link
f. Link 2 – Crank
g. Link 3 – Slider
h. Link 4 – Frame (Piston and Cylinder arrangement )
3. When the link 2 rotates about the about B as a centre the link 4
reciprocates.(Piston reciprocates inside the cylinder)
4. The fixed links guides the frame
.
Figure: Scotch Yoke Mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
c. Oldham’s coupling.
1. In this mechanism, the inversion is obtained by fixing link 2.
2. It consist of four link
a. Link 1 – Flanges
b. Link 2 – Supporting Frame
c. Link 3 – Flanges
d. Link 4 –Intermediate Piece.
3. The flanges (link 1 and link 3) forms turning pair with the link 2.
4. When the driving shaft is rotated, the flange (link 1) causes the
intermediated piece (link 4) to rotate at the same angle through which
the flange (link 1) is rotated.
5. It further rotates the flange (link 3) at the same angle through which the
flange (link 1) is rotated. Hence link 1,3,4, have same angular velocity.
6. A little consideration there is a sliding motion between link 4 and link 1
and 3.
Figure: Oldham’s Coupling

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
COMMON MECHANISM
1. BICYCLE FREE WHEEL SPROCKET MECHANISM
2. GENEVA MECHANISM
3. ACKERMAN’S STEERING GEAR MECHANISM
4. FOOT OPERATED AIR PUMP MECHANISM

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
1. BICYCLE FREE WHEEL SPROCKET MECHANISM
1. Mechanical or automotive engineering, a freewheel or overrunning clutch
is a device in a transmission that disengages the driveshaft from the
driven shaft when the driven shaft rotates faster than the driveshaft. An
overdrive is sometimes mistakenly called a freewheel, but is otherwise
unrelated.
2. The condition of a driven shaft spinning faster than its driveshaft exists in
most bicycles when the rider holds his or her feet still, no longer pushing
the pedals. Without a freewheel the rear wheel would drive the pedals
around.
Figure: Bicycle Free Wheel Sprocket Mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
3. In the past, such freewheel mechanisms have included an inner freewheel
body which engages threads on a rear wheel hub, and an outer freewheel
body, including an integral sprocket for engagement with the roller chain.
4. A pair of pawls, and at least one pawl spring have been disposed between
said inner and outer freewheel bodies, whereby forward rotation of the
outer freewheel body would cause the pawls to engage and drive the inner
freewheel body and rear wheel. Also, the pawls would allow the rear
wheel to rotate in a forward direction when the outer freewheel body was
rotating more slowly or was stopped.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
2. GENEVA MECHANISM
1) In the mechanism shown in figure, link A is driver and it contains a pin
which engages with the slots in the driven link B.
2) The slots are positioned in such a manner, that the pin enters and leaves
them tangentially avoiding impact loading during transmission of motion.
3) In the mechanism shown, the driven member makes one-fourth of a
revolution for each revolution of the driver.
4) The locking plate, which is mounted on the driver, prevents the driven
member from rotating except during the indexing period.
Figure: Geneva mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
5. The Geneva mechanism is a timing device.
6. Geneva mechanism consists of a rotating disk with a pin and another
rotating disk with slots (usually four) into which the pin slides
7. In the most common arrangement, the driven wheel has four slots and
thus advances for each rotation of the drive wheel by one step of 90°.
If the driven wheel has n slots, it advances by 360/n° per full rotation of the
drive wheel.
8. One application of the Geneva drive is in movie projectors. Geneva
wheels having the form of the driven wheel were also used in mechanical
watches. Other applications of the Geneva drive include the pen change
mechanism in plotters, automated sampling devices, indexing tables in
assembly lines, tool changers for CNC machines, and so on.
Figure: Geneva mechanism

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
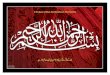
3. Ackerman’s Steering Gear Mechanism.
1) The steering gear mechanism is used for changing the direction of two or
more of the wheel axles with reference to the chassis, so as to move the
automobile in any desired path.
2) When the vehicle takes a turn the front wheels along with the respective
axles turn about the respective pivoted points. The back wheels remain
straight and do not turn. Therefore steering is done by front wheels only.
3) In order to avoid skidding the two front wheels must turn about the same
Instantaneous center I which lies on the axis of the back axle. If the ICR of
the two front wheels do not coincide with the ICR of the back wheels
skidding will take place, which causes wear and tear of tires.
4) Thus the condition for correct steering is that the entire four wheel must
turn about the same ICR. The axis of the inner wheel makes a larger
turning angle θ than the angle Φ subtended by the axis of outer wheel.
Let
a= wheel track
b=wheel base
c=distance between the pivots A and b of the front axle
Now from triangle IBP
Cot θ=BP
IP
and from triangle IAP
Cot Φ = AP = AB + BP = AB + BP = c + Cot θ
IP IP IP IP b
Cot Φ - Cot θ =c/b

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
5) This is the fundamental equation for correct steering. If this condition is
satisfied there will be no skidding of the wheels when vehicle takes a turn.
6) In Ackerman steering gear the mechanism ABCD is a four bar crank
chain. The shorter link BC and AD are of equal length and are connected
by hinge joints with front wheel axle.The longer link AB and CD are of
unequal length.
Figure: Ackerman’s Steering gear Mechanism.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
7) The following are three positions for correct steering
a. When vehicle moves along a straight path, the longer link AB and CD
are parallel and shorter link BC and AD are equally inclined to the
longitudinal axis of the vehicle.
b. When the vehicle is steering to the left, the position of the gear as
shown by dotted lines. In this position the lines of the front wheel axle
intersect on the back wheel axle at I for correct steering.
c. When the vehicle is steering to the right the similar position may be
obtained.

THEORY OF MACHINE
FUNDAMENTALS AND TYPES OF MECHANISM Vaibhav Vithoba Naik
4. Foot operated Air Pump Mechanism.
1) It consists of a cylinder which can oscillate. A piston is mounted in the
cylinder. The cylinder is connected to the foot rest.
2) The arms connected to the foot rest can oscillate.
3) A retrieving spring can bring back the foot rest back to initial position’s the
foot rest is pressed the cylinder oscillates.
4) It creates reciprocating motion of the piston in the cylinder. Therefore
suction and delivery stroke can be obtained.
This is also called as oscillating cylinder mechanism.
Figure: Foot Operated Air Pump Mechanism