Embed Size (px)
Citation preview
FULLY AUTOMATIC MASS LABORATORY FROM 1 mg UP TO 50 kg
– ROBOTS PERFORM HIGH PRECISION MASS DETERMINATION
Christian BuchnerBEV- Bundesamt für Eich- und Vermessungswesen (Federal Office of Metrology and Surveying), Austria
EURAMET auxiliary Meeting Mass March 2008 Bucharest, Romania
FULLY AUTOMATIC MASS LABORATORY FROM 1 mg UP TO 50 kg
– ROBOTS PERFORM HIGH PRECISION MASS DETERMINATION
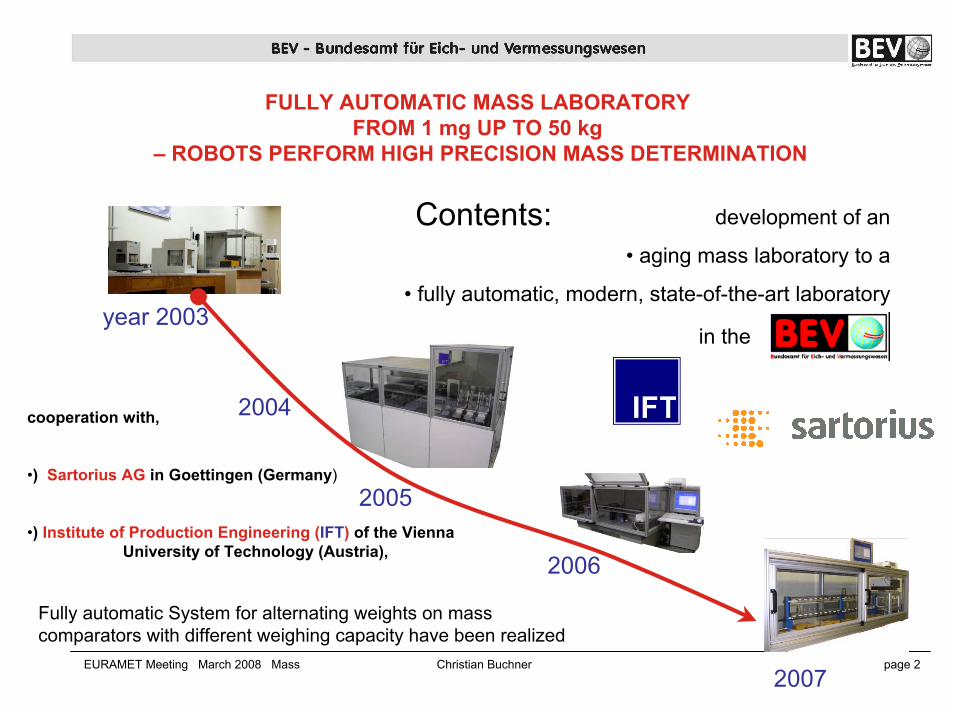
Fully automatic System for alternating weights on mass comparators with different weighing capacity have been realized
cooperation with,
•) Sartorius AG in Goettingen (Germany)
•) Institute of Production Engineering (IFT) of the Vienna University of Technology (Austria),
development of an
• aging mass laboratory to a
• fully automatic, modern, state-of-the-art laboratory
in theyear 2003
2006
2005
2004
Contents:
EURAMET Meeting March 2008 Mass Christian Buchner page 22007
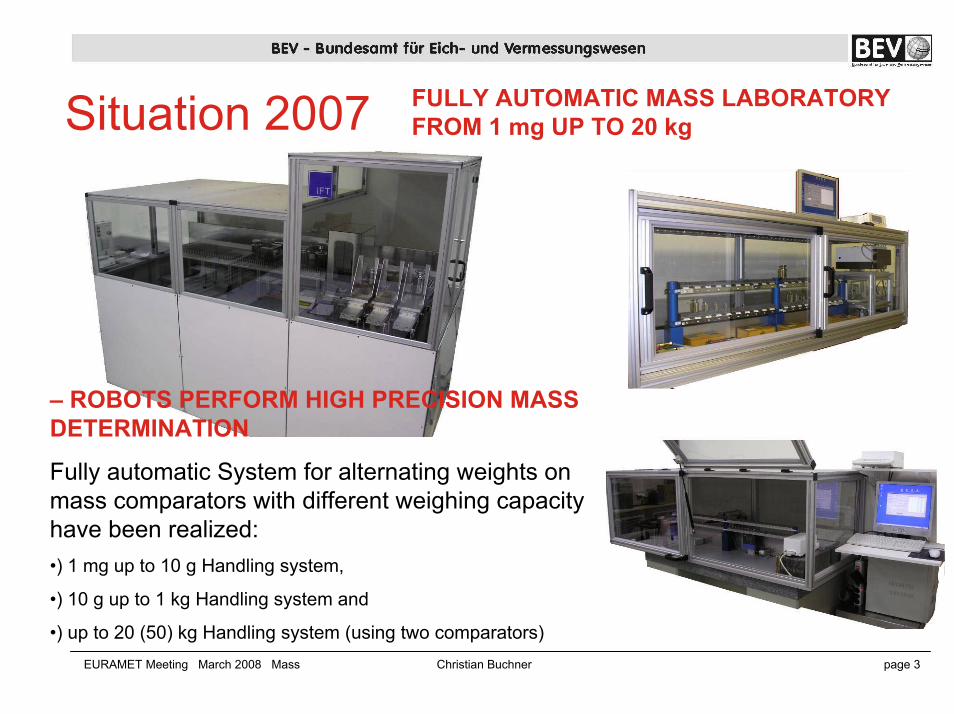
Situation 2007 FULLY AUTOMATIC MASS LABORATORY FROM 1 mg UP TO 20 kg
– ROBOTS PERFORM HIGH PRECISION MASS DETERMINATION
Fully automatic System for alternating weights on mass comparators with different weighing capacity have been realized:•) 1 mg up to 10 g Handling system,
•) 10 g up to 1 kg Handling system and
•) up to 20 (50) kg Handling system (using two comparators)EURAMET Meeting March 2008 Mass Christian Buchner page 3
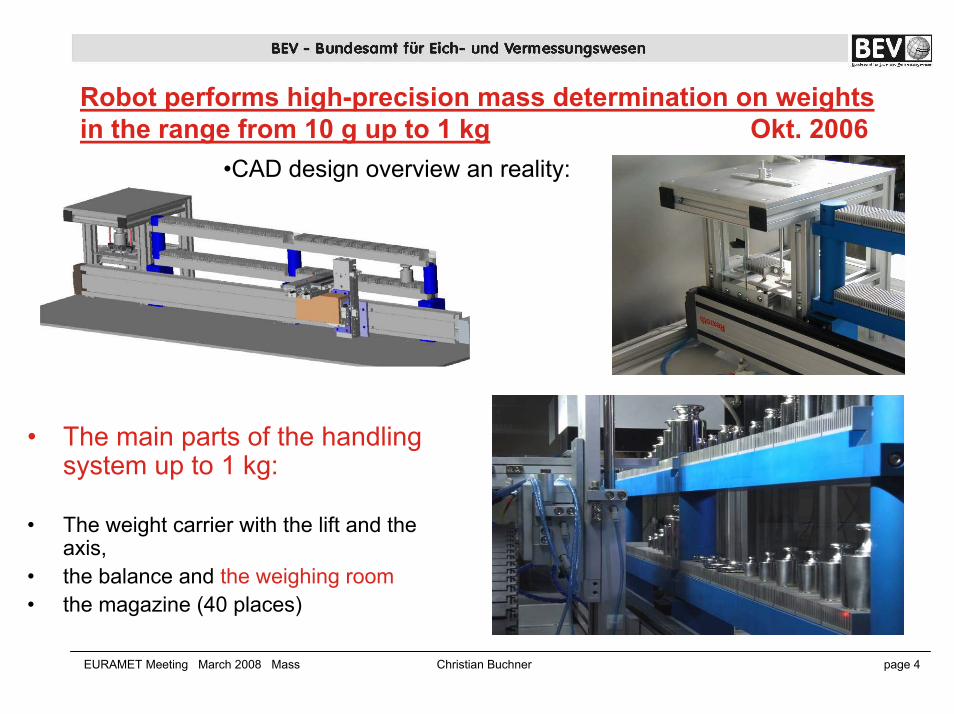
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg Okt. 2006
•CAD design overview an reality:
• The main parts of the handling system up to 1 kg:
• The weight carrier with the lift and the axis,
• the balance and the weighing room• the magazine (40 places)
EURAMET Meeting March 2008 Mass Christian Buchner page 4
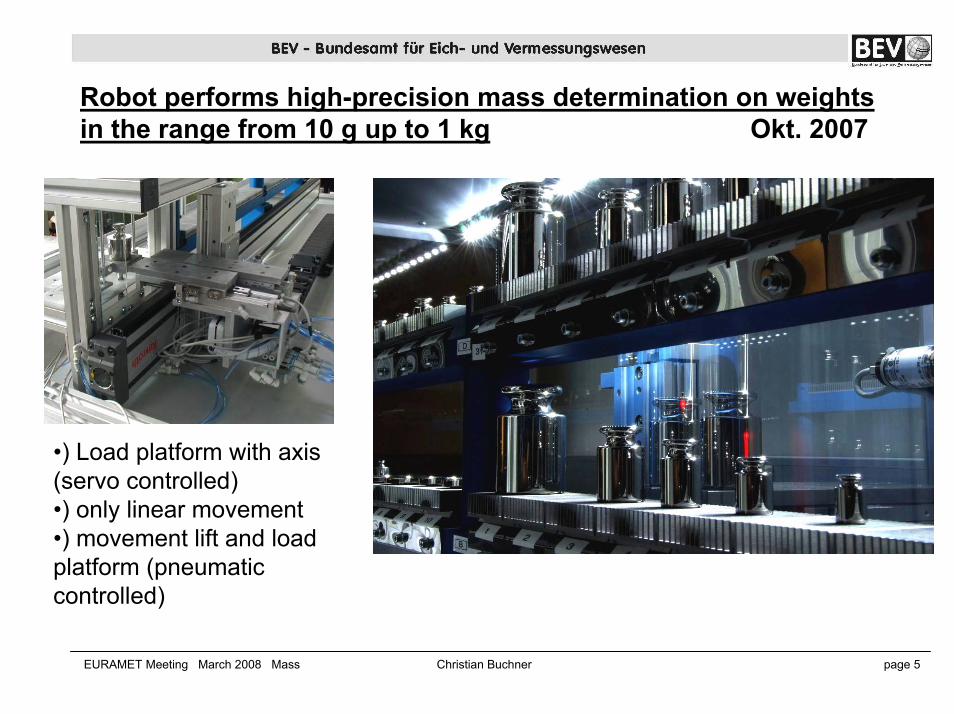
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg Okt. 2007
•) Load platform with axis (servo controlled)•) only linear movement•) movement lift and load platform (pneumatic controlled)
EURAMET Meeting March 2008 Mass Christian Buchner page 5
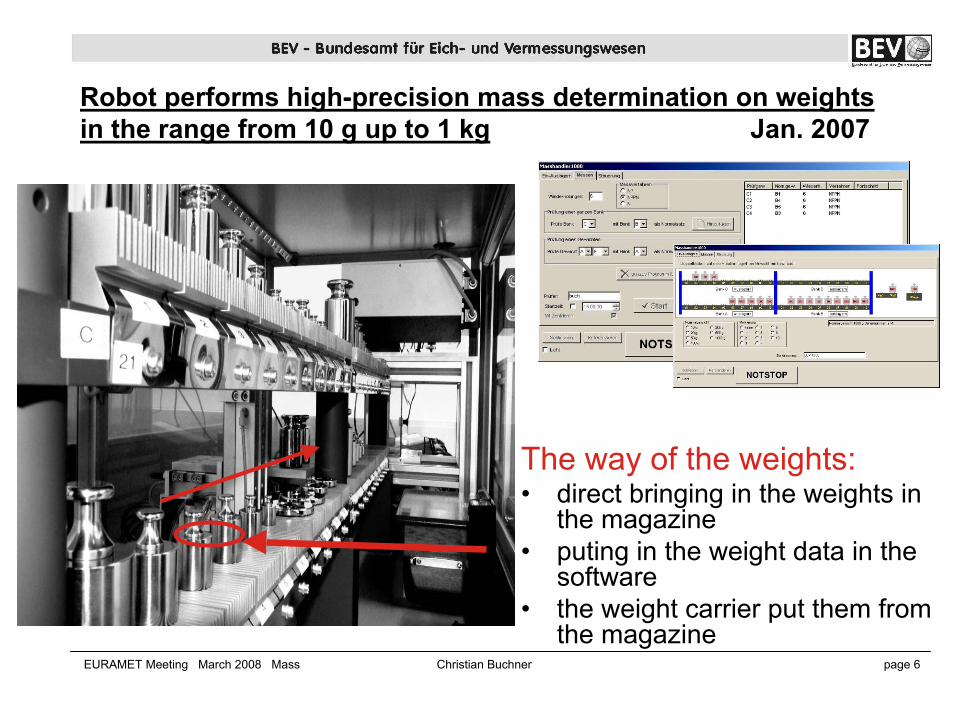
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg Jan. 2007
Christian Buchner page 6
The way of the weights:• direct bringing in the weights in
the magazine• puting in the weight data in the
software• the weight carrier put them from
the magazine EURAMET Meeting March 2008 Mass
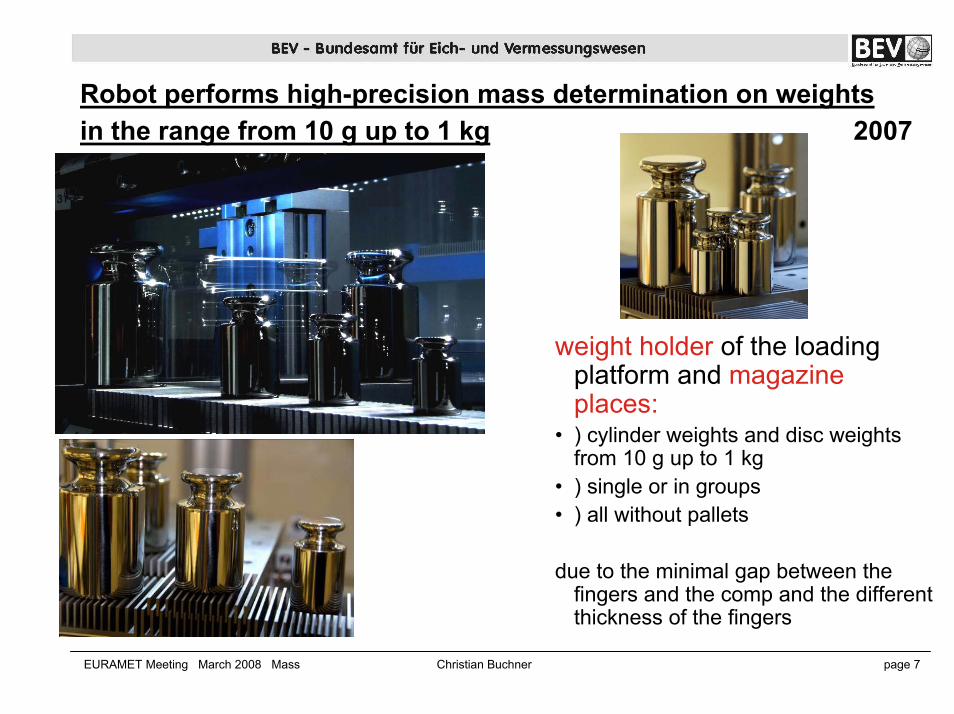
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg 2007
weight holder of the loading platform and magazine places:
• ) cylinder weights and disc weights from 10 g up to 1 kg
• ) single or in groups• ) all without pallets
due to the minimal gap between the fingers and the comp and the different thickness of the fingers
EURAMET Meeting March 2008 Mass Christian Buchner page 7
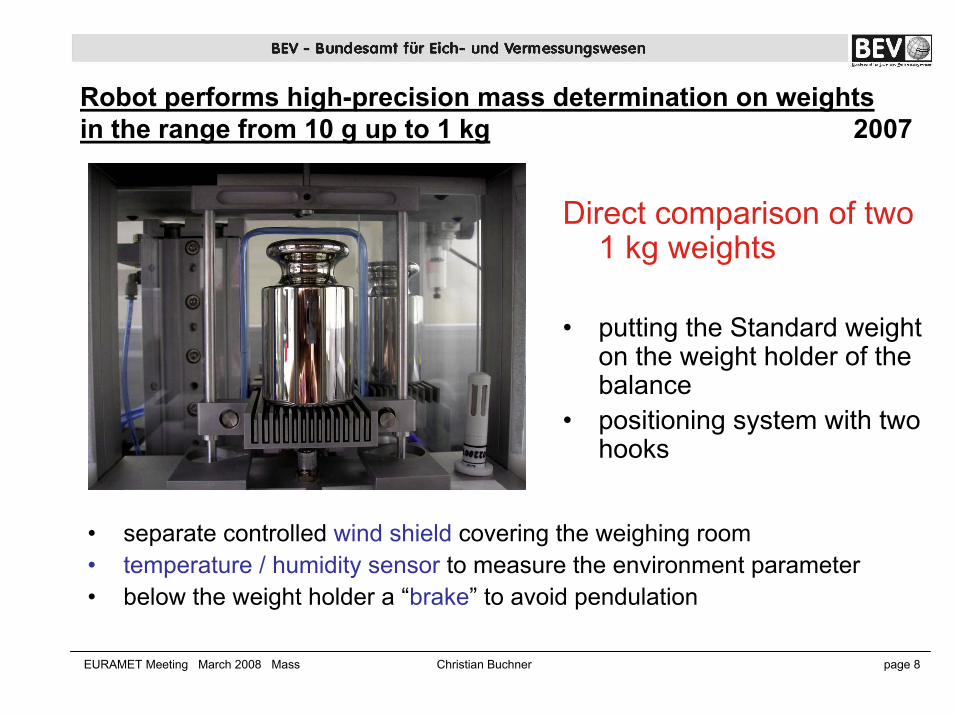
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg 2007
Direct comparison of two 1 kg weights
• putting the Standard weight on the weight holder of the balance
• positioning system with two hooks
• separate controlled wind shield covering the weighing room• temperature / humidity sensor to measure the environment parameter• below the weight holder a “brake” to avoid pendulation
EURAMET Meeting March 2008 Mass Christian Buchner page 8
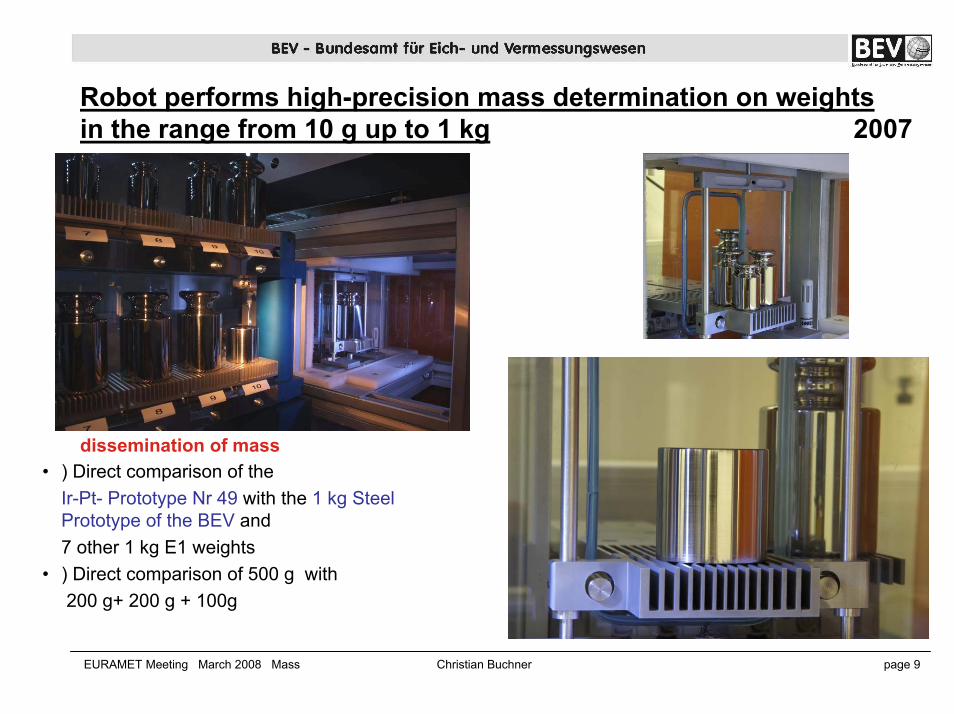
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg 2007
dissemination of mass• ) Direct comparison of the
Ir-Pt- Prototype Nr 49 with the 1 kg Steel Prototype of the BEV and 7 other 1 kg E1 weights
• ) Direct comparison of 500 g with200 g+ 200 g + 100g
EURAMET Meeting March 2008 Mass Christian Buchner page 9
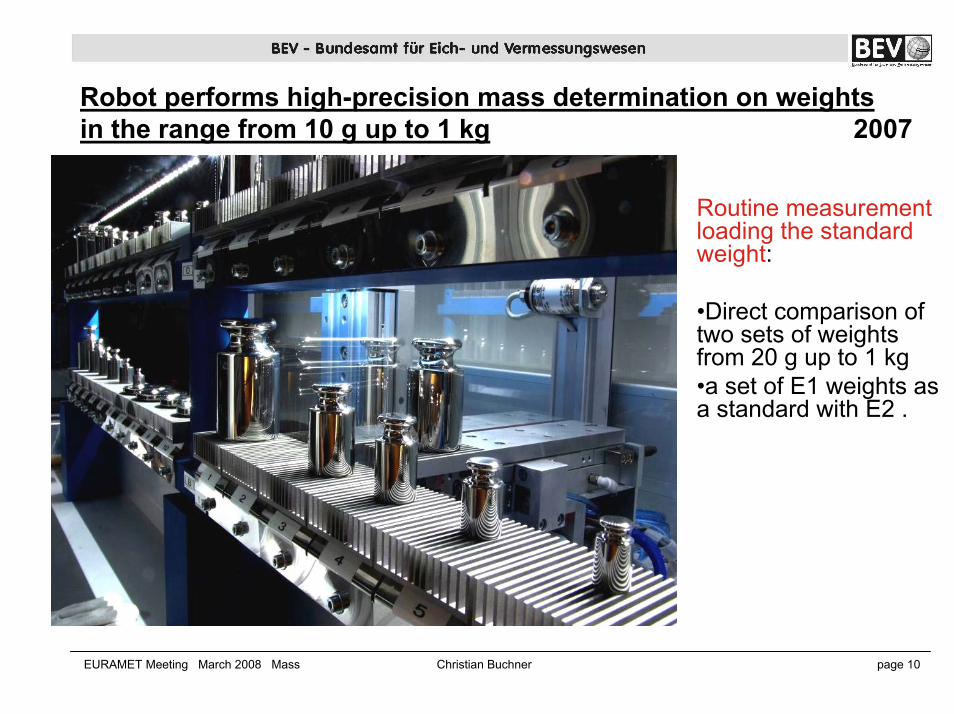
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg 2007
Routine measurement loading the standard weight:
•Direct comparison of two sets of weights from 20 g up to 1 kg •a set of E1 weights as a standard with E2 .
EURAMET Meeting March 2008 Mass Christian Buchner page 10
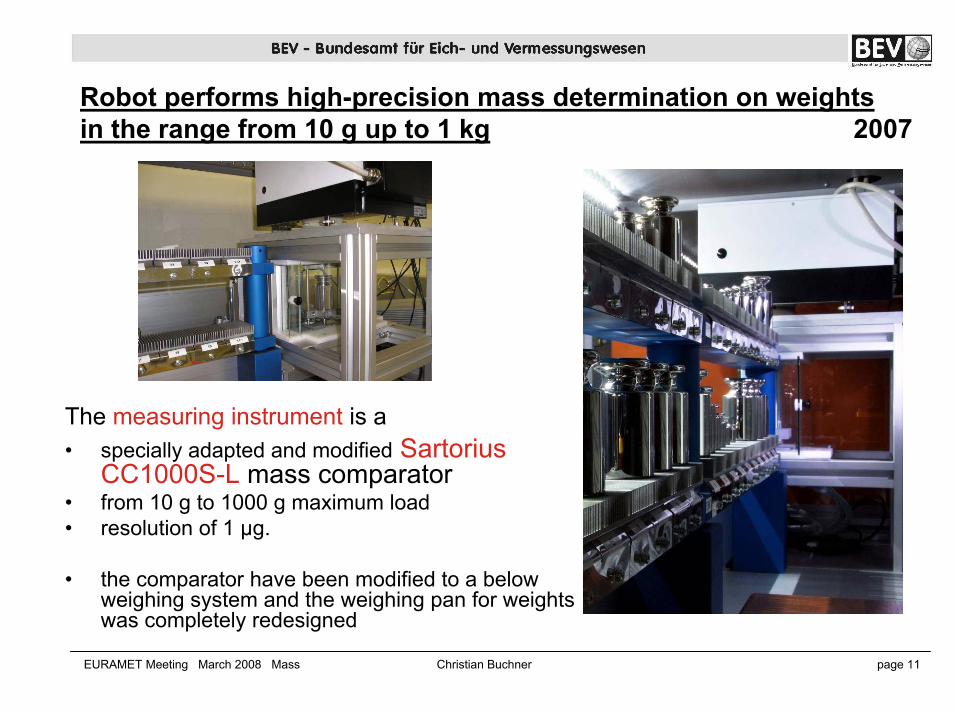
Robot performs high-precision mass determination on weights in the range from 10 g up to 1 kg 2007
The measuring instrument is a• specially adapted and modified Sartorius
CC1000S-L mass comparator• from 10 g to 1000 g maximum load • resolution of 1 µg.
• the comparator have been modified to a below weighing system and the weighing pan for weights was completely redesigned
EURAMET Meeting March 2008 Mass Christian Buchner page 11
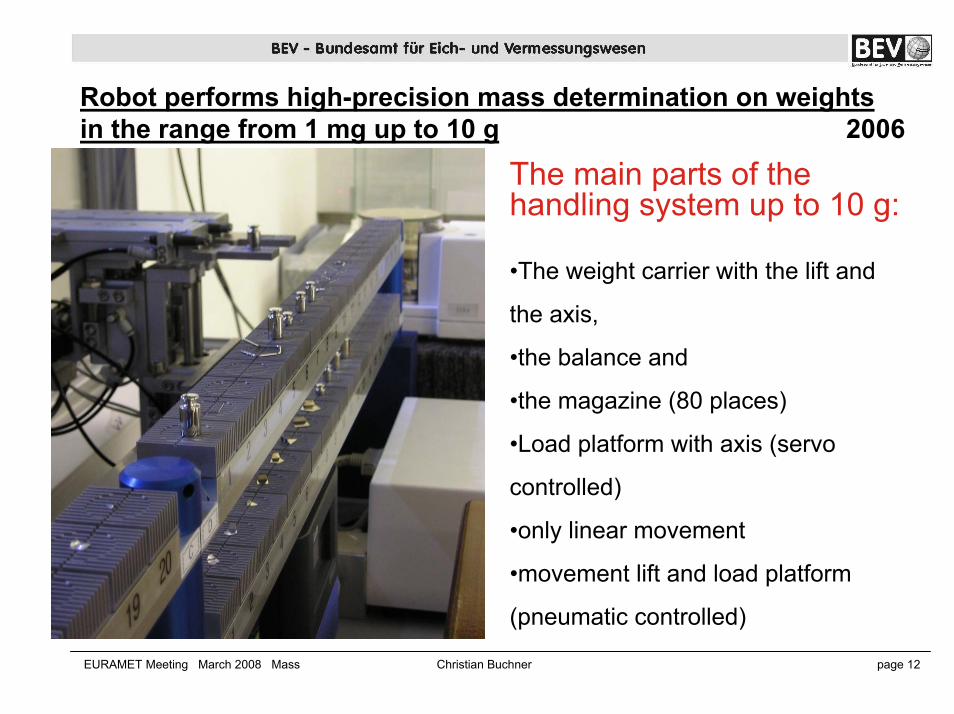
Robot performs high-precision mass determination on weights in the range from 1 mg up to 10 g 2006
Christian Buchner page 12
The main parts of the handling system up to 10 g:
•The weight carrier with the lift and
the axis,
•the balance and
•the magazine (80 places)
•Load platform with axis (servo
controlled)
•only linear movement
•movement lift and load platform
(pneumatic controlled)
EURAMET Meeting March 2008 Mass
Robot performs high-precision mass determination on weights in the range from 1 mg up to 10 g 2006
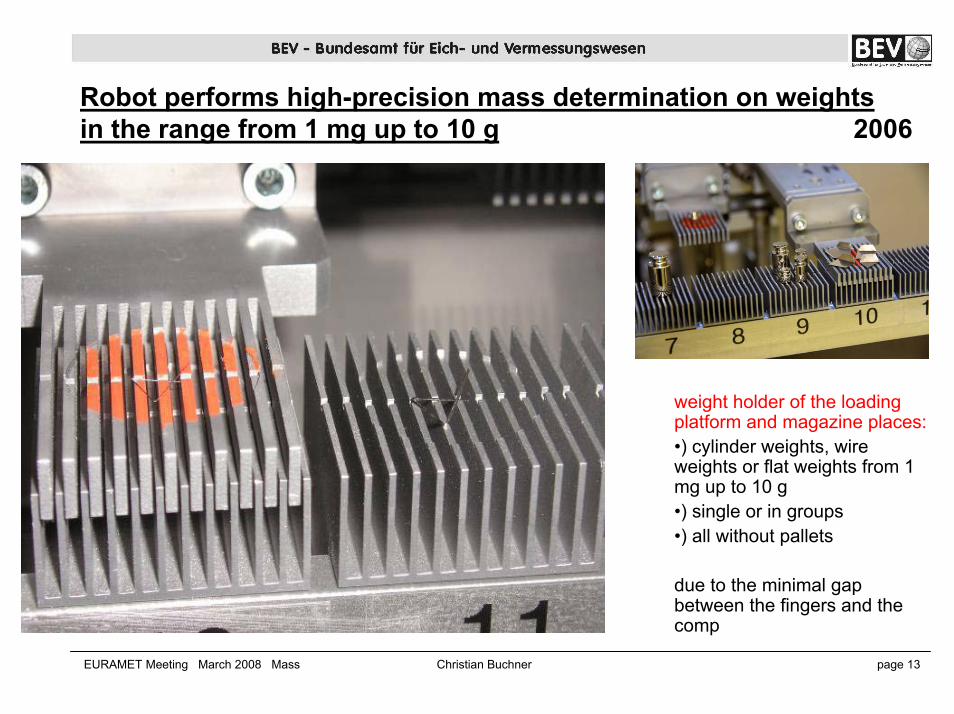
weight holder of the loading platform and magazine places:•) cylinder weights, wire weights or flat weights from 1 mg up to 10 g•) single or in groups•) all without pallets
due to the minimal gap between the fingers and the comp
EURAMET Meeting March 2008 Mass Christian Buchner page 13
Robot performs high-precision mass determination on weights in the range from 1 mg up to 10 g 2006
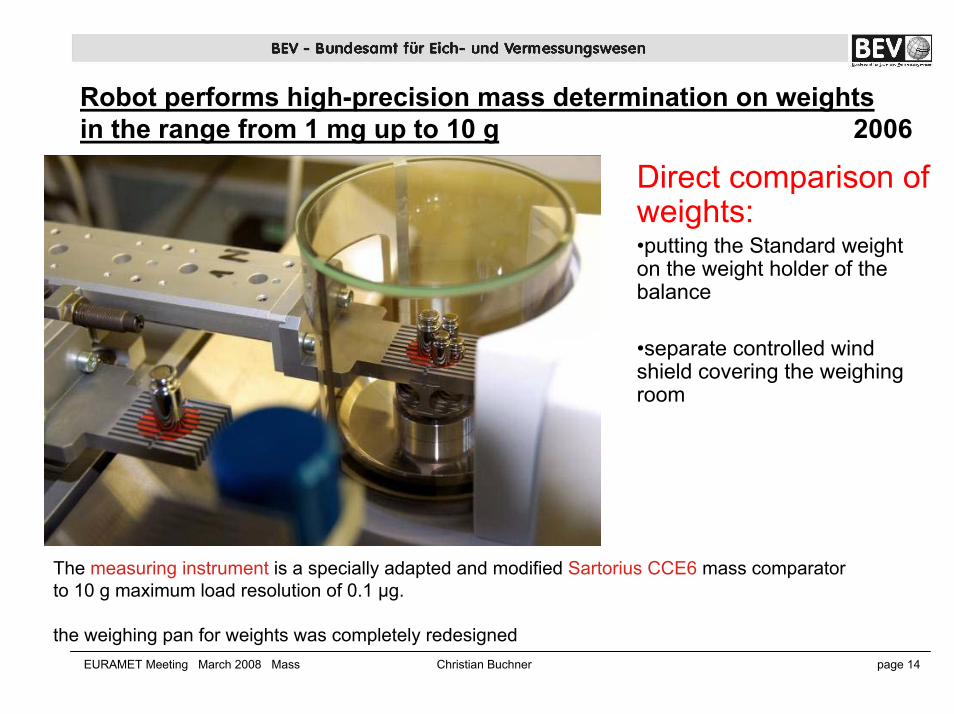
Direct comparison of weights: •putting the Standard weight on the weight holder of the balance
•separate controlled wind shield covering the weighing room
The measuring instrument is a specially adapted and modified Sartorius CCE6 mass comparatorto 10 g maximum load resolution of 0.1 µg.
the weighing pan for weights was completely redesignedEURAMET Meeting March 2008 Mass Christian Buchner page 14
Robot performs high-precision mass determination on weights in the range from 1 mg up to 20 kg Oct. 2007
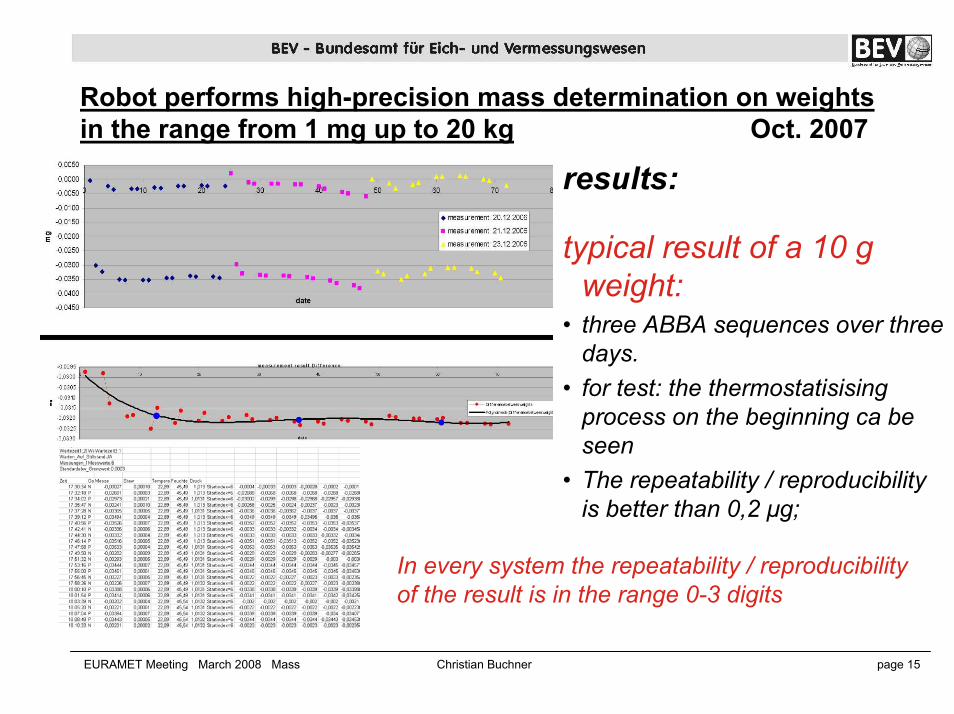
results:
typical result of a 10 g weight:
• three ABBA sequences over three days.
• for test: the thermostatisisingprocess on the beginning ca be seen
• The repeatability / reproducibility is better than 0,2 µg;
In every system the repeatability / reproducibility of the result is in the range 0-3 digits
EURAMET Meeting March 2008 Mass Christian Buchner page 15
Robot performs high-precision mass determination on weights in the range from 1 kg up to 20 kg 2005
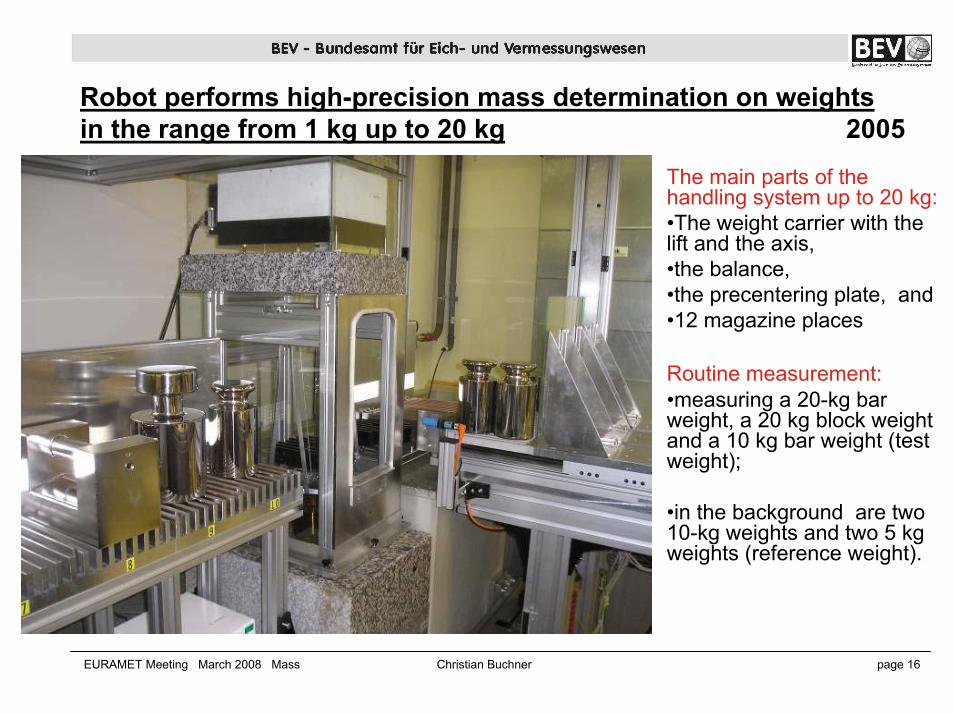
The main parts of the handling system up to 20 kg:•The weight carrier with the lift and the axis, •the balance, •the precentering plate, and •12 magazine places
Routine measurement:•measuring a 20-kg bar weight, a 20 kg block weight and a 10 kg bar weight (test weight);
•in the background are two 10-kg weights and two 5 kg weights (reference weight).
EURAMET Meeting March 2008 Mass Christian Buchner page 16
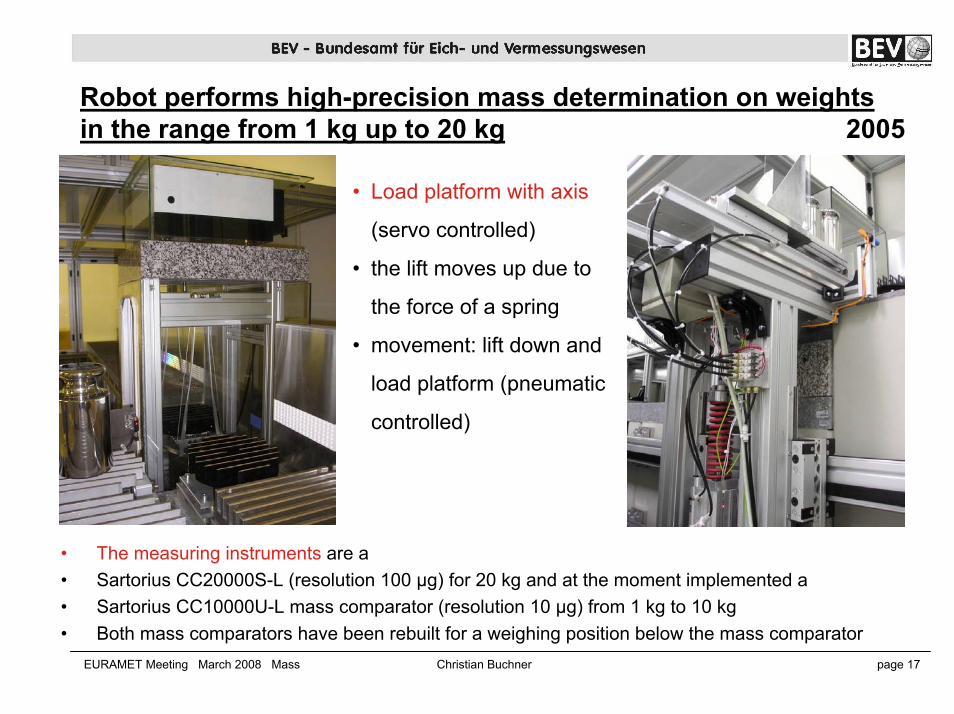
Robot performs high-precision mass determination on weights in the range from 1 kg up to 20 kg 2005
• Load platform with axis
(servo controlled)
• the lift moves up due to
the force of a spring
• movement: lift down and
load platform (pneumatic
controlled)
• The measuring instruments are a • Sartorius CC20000S-L (resolution 100 µg) for 20 kg and at the moment implemented a• Sartorius CC10000U-L mass comparator (resolution 10 µg) from 1 kg to 10 kg• Both mass comparators have been rebuilt for a weighing position below the mass comparator
EURAMET Meeting March 2008 Mass Christian Buchner page 17
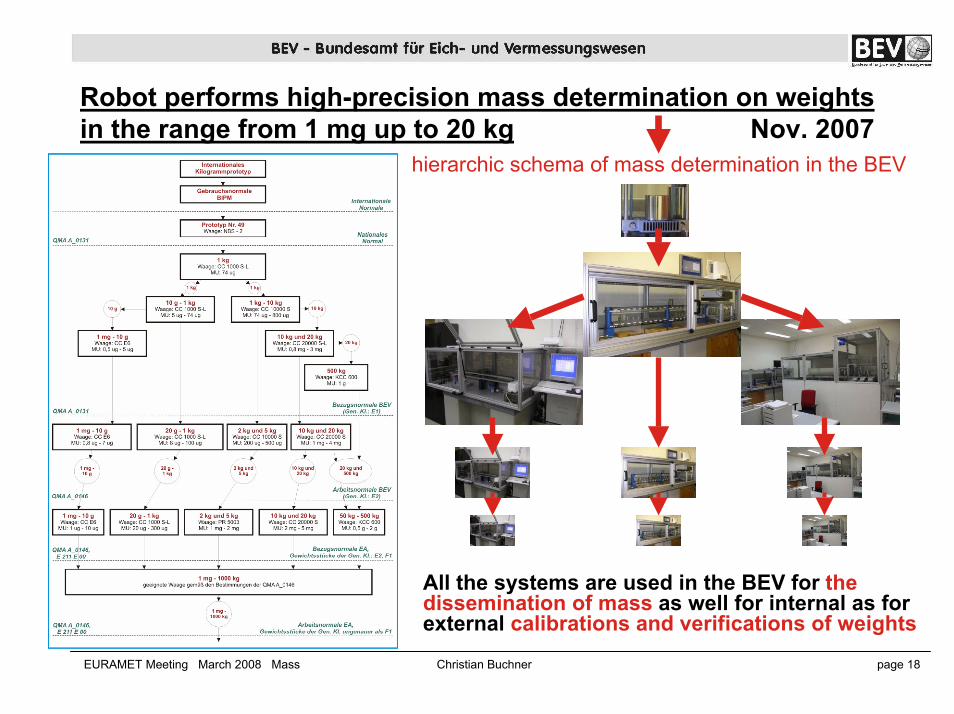
Robot performs high-precision mass determination on weights in the range from 1 mg up to 20 kg Nov. 2007
hierarchic schema of mass determination in the BEV
All the systems are used in the BEV for the dissemination of mass as well for internal as for external calibrations and verifications of weights
EURAMET Meeting March 2008 Mass Christian Buchner page 18

FULLY AUTOMATIC MASS LABORATORYFROM 1 mg UP TO 50 kg
– ROBOTS PERFORM HIGH PRECISION MASS DETERMINATION
Thank you for your attention
Christian BuchnerBEV- Bundesamt für Eich- und Vermessungswesen
(Federal Office of Metrology and Surveying), Austria
in cooperation with,
the Institute of Production Engineering (IFT) of the Vienna University of Technology, and Sartorius AG in Goettingen,
EURAMET Meeting March 2008 Mass Christian Buchner page 19





























