-
8/10/2019 fulltext 14.pdf
1/12
J Intell Manuf (2008) 19:421432DOI 10.1007/s10845-008-0093-5
Fuzzy-based methodology for multi-objective schedulingin a
robot-centered exible manufacturing cell
Indira Molina Restrepo S. Balakrishnan
Received: 30 January 2008 / Accepted: 1 February 2008 /
Published online: 28 February 2008 Springer Science+Business Media,
LLC 2008
Abstract A fuzzy logic based methodology for
generatingthesequence of part movements in a multi-product batch
pro-cessing through a computerized machine cell is presented inthis
paper. A number of production objectives are taken intoaccount. Two
fuzzy based strategies: fuzzy-job and fuzzy-machine are proposed
and their performance is comparedto two well known dispatching
rules such as SPT (Short-est Processing Time) and WEED (Weighted
Earliest DueDate).Thesequencing algorithmwas implemented on a
stan-dard personnel computer and the scheduler was interfaced toa
robot controller for implementing loading and unloadingstrategy
within the cell. The proposed fuzzy-based method-ologies especially
fuzzy-job shows a superior performancecompared to the traditional
dispatching rules considered.
Keywords Fuzzy logic Multi-objective scheduling Flexible
manufacturing cell
Introduction
Flexible Manufacturing Cell (FMC) is a group of
automatedmachinesservicedby a central material-handling device
suchas robots or automated guided vehicles. The exibility toprocess
a wide variety of parts gives rise to numerous waysof routing a
group of parts within the cell. One of the mostimportant problem
encountered in the FMCscheduling dealswith theassignment of given
resourcesto differentprocesses.The best schedule must satisfy the
production objectivesconsidered. The production objectives taken
into accountin this study are: maximize throughput; minimize
penalty
I. M. Restrepo S. Balakrishnan ( B )Department of Mechanical and
Manufacturing Engineering,University of Manitoba, Winnipeg, MB,
Canada R3T 2N2e-mail: [email protected]
for tardy jobs; maximize machine utilization; and minimizerobot
travel time. The processing environment considered isa
multistage-job shop problem wherein each job has its ownprocessing
requirement and sequences. The scheduling prob-lem considered is an
open, deterministic, and static case. Thescheduling criteria
include both cost and performance rela-ted measures. The key
objective of this work is to developan efcient computer based
scheduling technique to generatethe sequence of parts, and control
the movement of the robotwithin a manufacturing cell in order to
fulll the chosen pro-duction objectives. Although standard
industrial robots arecomputerized, they do not possess the
intelligence to dynam-ically alter preprogrammed motions. Hence an
external per-sonal computer (PC) is employed to provide that
additionalcontrol capability.
In the present scenario, each batch consists of multipleorders.
Thus, each batch involves multiple products, eachwith different
specications. The machining times vary frompart to part. Certain
parts may need to be processed on mul-tiple machines, and a certain
sequence of operations maybe important. In a sequential process,
the parts are routedthrough the cell to visit machines in a
pre-specied order.Customer requirements refer to due dates and
penalties,whereas production costs refer to robot and machine
idlecosts. On the other hand, a non-sequential processing willallow
the exibility to route the parts bypassing the sequenc-ing
requirement.Penalty values areassignedto each part typeand are
depended on the characteristics of the customer andterms of
contracts. Robots and machines are an expensiveinvestment and hence
it is necessary to use them effectively.It is important to balance
the idle times of the robot versusthat of the machines. Machine
idle cost requires a productionstudy, and these values have to be
set by the user. In our set-ting, all data is randomly assigned in
order to mimic a widevariety of manufacturing situations.
1 3
-
8/10/2019 fulltext 14.pdf
2/12
422 J Intell Manuf (2008) 19:421432
It is assumed that there is only one operation at a timeon a
machine. Processing times are part specic and are notmachine
dependent. Parts aredelivered to themachines whenneeded, and hence
no buffers are present in each machine.The task of the robot is to
pick up parts from an input buffer,move them through the cell, and
drop them off at an out-put buffer. The travel time of the robot
between machines is
known andremains xed.However it shouldbe noted that thetotal
travel time taken by the robot to move a part through itsproduction
cyclewill be a function of the sequence generatedby the scheduling
algorithm. The multi-objective nature of the problem under
consideration presents many challenges.Many approaches can be
followed. For this project, a newfuzzy-based approach with a
limited number of heuristicrules is considered. It was found to be
easy to model andthe computational times were found to be very
minimal, anaspect that is very critical for real-time
implementations.
Review of literature
Extensive research hasbeen done on aspects related to
sched-uling of exible manufacturing systems. Due to the com-plexity
and nature of scheduling, several approaches havebeen considered,
ranging from traditional solutions involv-ing complex mathematical
analysis to the recent approach,namelyreasoning algorithms. In
addition,a numberof differ-ent dispatching rules have also been
proposed. An efcientuse of robotic cells will no doubt increase the
productionrates. Modelingissues related to loading of
multiplemachineswith a dual-gripper robot has been proposed (Sethi
et al.2004 ). Analysis for nding optimal moves of material
han-dling systems in a production cell for the manufacture of
machine castings for truck differential assemblies has
beenresearched (Brauner and Finke 2001 ). The ndings from thisstudy
are applicable to sequential ow of products throughmanufacturing
cell and cannot be applied to products withvaryingsequencesand
process times. Theyalso consideronlya single objective. It has been
shown that time based rulessuch as SPT are good to reduce ow time
and machine idletime ( Chen and Lin 1999 ). However, jobs with long
pro-cessing times tend to be tardy. Dispatching rules based
ontardiness, the bottleneck dynamics, resource pricing and
theeffects of inserted idleness have been proposed ( Kutanogluand
Sabuncuoglu 1999 ). They concluded that different pric-ing schemes
should be used in different environments. Acoordination rule that
looks ahead about machine idle time,and mechanisms for tracking the
demand, and selection of jobs has been proposed ( Holthaus and
Ziegler 1997 ). Thesimulation studies demonstrated the
effectiveness of the rulein improvingow-timeandduedate based
objectives com-pared to scheduling rules without any
coordination.
A concurrent solution for loading and scheduling in aexible
manufacturing environment has been found to be
quiteeffective ( MorenoandDing 1993 ). A branch and
boundtechnique to optimize the moves of a robot for loadingparts in
a three machine cell has also been developed(Chen et al. 1997 ).
Their solution became ineffective whenthenumber
ofpartsexceededten.A solution based oncoloredPetri Nets to control
the alternative machining and sequenc-ing in a FMC has
beenpresented ( Yalcin and Boucher 1999 ).
The study showed that they could be used as an effectivemodeling
tool.
Techniques based on articial intelligence have been exp-lored by
a number of investigators. A methodology basedon training a
back-error propagation network, to solve a job-shop scheduling
problem hasalso been investigated ( Jain andMeeran 1996 ). However,
their methodology is not effectivefor large scale problems. Fuzzy
set theory has been foundto be useful for modeling and solving
scheduling problemswith uncertain data. A multi-objective fuzzy
approach thatemployed membership functions to nd the share of
eachobjective in arriving at the nal decision rules has been
foundto be effective ( Kazerooni et al. 1997 ). It was then
appliedfor selecting machines, after pre-selection of a job using
tra-ditional scheduling rules. Their approach combined
differentrules for the selection of jobs and machines. A
methodologybased on a combination of fuzzy and SPT strategy
improvedthe net prot and average lead-time in the test cases
theyconsidered.
In a robot centered machine cell, the robot may be pro-grammed
to wait in front of a machine and pick up the part assoon as the
machine completes processing a part and moveit to the next
processing station. This situation is termed asno-wait constraint.
A two and three machine problem forprocessing identical and
dissimilar parts have been proposedand results pertaining to
optimal cycle time for this type of situation have been presented
(Agentis 2000 ) and (Agentisand Pacciarelli 2000 ). A neural
network based approach for asingle machine job sequencing hasbeen
found to be effective(El-Bouri et al.2000
).Aproblemisclassiedrstbyonetypeof neural network into one of a
number of categories. Thenanother neural network, which is
specialized for a particularcategory, applies previously learnt
relationship to produce a job sequence that aims to better satisfy
the given objective.
Use of genetic algorithms (GA) for tackling schedulingproblems
has also received wide attention. An approach tooptimize
theoperation when products have to meet a duedateconstraint has
been the focus in one such study ( Sannomiyaand Iima 1996 ). GA has
also been used to obtain solutionsfor scheduling a FMS with setup
time as constraint ( Jawaharet al. 1998 ). A fuzzy-based
methodology to address themachine loading problem has been
developed ( Vidyarthi andTiwari 2001 ). Even thoughthe
minimizationof systemunbal-ance and maximization of throughput were
their objective,they didnot take into account theinclusion
ofdue-date relatedobjectives to reduce costs. The job ordering and
sequencing
1 3
-
8/10/2019 fulltext 14.pdf
3/12
J Intell Manuf (2008) 19:421432 423
as well as the operation-machine allocation decisions weremade
on the evaluation of membership functions.
From a review of literature, it can be concluded that
nogeneralization can be made regarding various dispatchingrules. No
single rule has shown to be superior in all typeof scenarios. They
have not performed uniformly well onmore than one criterion. A
common belief is that a combina-
tion of simple dispatching rules or a combination of heuris-tics
with simple dispatching rules performs better than singlerules in
many cases. When multiple part types with each hav-ing its own
sequence and processing times is put througha manufacturing cell,
in addition to the traditional processobjectives, the efcient use
of material handling system alsobecomes critical.Althoughthe travel
times of robotsbetweenmachines are xed, the total travel time
required to move apart through the cell will be a function of the
sequence gen-erated and cannot be assumed to be the same
always.
The work reported in this paper uses fuzzy logic becauseof its
ability to deal with uncertain data. As will be shown,it is easy to
implement and is an excellent tool for decisionmaking in
multi-objective systems. It needs fewer rules, andthe knowledge is
easier to model. It also leads to faster solu-tions, a key issue
for real-time control of FMC.
Methodology
The proposed fuzzy-logic based methodology is an extensionof SPT
and WEDD, and has the ability to take into accountfactors such as
machine and robot idle costs. When a groupof parts are processed on
a FMC, the modeling issues whenmultiple objectives are considered
are extremely complex.The routing sequence and processing time
directly contrib-ute to the idle cost of machines and robot.
Different objectivefunction will give rise to different routing
sequence. Fuzzy-set approach in combination with a set of heuristic
rules waschosen as the methodology with a hope to reduce the
com-putational burden on the control processors. This issue
iscritical for real-time control of robots and machines. Thefuzzy
approach employed, considers part and machine char-acteristics as
twoseparate fuzzy subsets. SPT andWEDD arewell known for their
effectiveness in optimizing the through-put and tardiness cost,
respectively. However, they are noteffective in dealing with
multi-objective problems. Beforedescribing the fuzzy-based
approach, a brief review of thescheduling algorithmsdevelopedand
theonescomparedwithwill be presented next.
Shortest processing time (SPT) and Weighted earliest duedate
(WEDD)
Shortest processing time (SPT)jobs are sequenced inincreasing
order of their processing time from many com-binations of
job/machine. As is well known, SPT provides a
good performance in throughput criteria. However, jobs withlong
processing times and early due dates tend to be tardy.SPT is dened
by:
SPT = MinPT ( j, m), (1)
where MinPT ( j, m) = minimum processing time of
thecom-binations job/machine.
Weighted earliest due date (WEDD)jobs are sequencedin increasing
order of the ratio of the due date of the job tothe penalty of the
job assigned when the job is late. AlthoughWEDD performs well in
terms of due date and penalty, itdoes not take into account
processing time information, andthus poor use of resources. WEDD
can be expressed as:
WEDD = Min DD
P, (2)
where Min(DD/P) = minimum ratio ofthe due date( DD ) overthe
penalty ( P ) of the jobs.
Fuzzy-logic
The foundation of fuzzy logic is fuzzy theory ( Zadeh 1965 ).A
fuzzy set theory to deal with problems in which the sourceof
imprecision is the absence of sharply dened criteria wasformulated.
A fuzzy set, A, in X is characterized by a mem-bership function A(
x )which associates each element in X ,a real number in the
interval [0,1]. The value of A( x ) at x represents the grade of
membership of x in A. The closer thisvalue is to unity, the higher
is the level of membership of x in A. On the contrary, in crisp
logic the membership values areeither 0 or 1. Fuzzy logic
introduces the possibility of inter-mediate values, and a more
precise way of dening gradesof membership of an element in a
domain.
Fuzzy set operators can be dened in terms of operationsbetween
membership functions. These operations are impor-tant because they
can describe interactions between vari-ables. The basic operations
in fuzzy logic are intersection,union and complement ( Zadeh 1965 )
and are dened as fol-lows:
Intersection : x X : A B( x ) = min ( A( x ), B( x )),
(3)
Union : x X : A B
( x ) = max ( A
( x ), B
( x )), (4)
Complement : x X : A ( x ) = 1 A( x ). (5)
This is a very simple extension of the classical
operations.Otherextensionsusingsimplealgebraictransformationshavealso
been provided ( Cox 1998 ).
Theconceptof fuzzydecisionmaking( BellmanandZadeh1970 ) can be
dened as: a decision process in which thegoals and/or constraints,
but not necessarily thesystemundercontrol, are fuzzy in nature.
They pointed out that fuzzygoals and constraints can be dened
accurately as fuzzy sets.
1 3
-
8/10/2019 fulltext 14.pdf
4/12
424 J Intell Manuf (2008) 19:421432
A fuzzy decision may be viewed as the intersection of thegiven
goals and constraints. Based on this work and furtherdevelopment
(Yager 1978 ), the decision-making techniquedeveloped in the
present work will incorporate material pre-sented below.
Objectives (goals and constraints) can be easily repre-sented by
fuzzy sets. Assuming we have a set of alternatives
in a decision X = [ X 1 , X 2 , . . ., X n ] and a particular
objec-tive A, we can associate with each element in X i a number A(
X i ) in theinterval [0,1] indicativeof how well X i
satisesobjective A. Theadvantage of fuzzy sets derives from the
factthat very fuzzy objectives as well as very precise
objectivescan be represented. In order to extend the above
definition tocombine multi-objectives in decision making, let us
assumewe would like to select among the set of alternatives X
theonethatbest satisesa setof objectives A1 , A2 , . . ., A p
.Eachalternative X i , is assigned a number indicative of how
wellit satises the objectives as a group A( X i ) and, of
course,the X with the highest value is the best. The dilemma
wouldbe on how to combine the contribution of each element toeach
objective, in order to get an overall general contribu-tion of each
element to all the objectives as a whole. Usingan intersection
operation one would be able to combine theobjectives.
The values of the alternatives are obtained by using mem-bership
functions. There are different ways of representingthe intersection
of objectives. One method ( Zadeh 1965 )chooses theminimal value
among theobjectives.However, if an alternative does not contribute
to an objective at all (i.e., A( X i ) = 0), then the result of the
intersection would bezero (0), thus excluding the contribution of
the alternative tothe other objectives even if those are close to
unity. Similarly,product and bounded sum methods eliminate the
contribu-tion of the objectives if one among them has
membershipvalue of zero (0). On the contrary, mean method
producesan average value of the contributions of the alternative to
thedifferent objectives. Hence, if the alternative does not benetan
objective at all, the solution does not go to zero (0).
Fur-thermore, in our specic case we are not only interested inthe
best alternative, but also in the second or third best one.For
example, in the case of an alternative (part type), whichcannot be
chosen as a result of resources not being available(i.e., machine
that needs to process is busy or part being blo-cked, etc), then
second or even third best alternative has to belooked at. Table 1
presents a batch composed of three differ-ent part types: A, B and
C ; and three objectives representedby membership functions A( p),
B( p) and C ( p) . In thistable, columns 1 and 2 refer to the part
type and the num-ber of parts to be produced respectively. Column 3
refers tothe job number. Columns 4, 5 and 6 represent the
processingtimes for the respective machines, namely M1, M2 and
M3.Table 1 also shows the numerical results obtained by usingthe
four methods ( Restrepo and Balakrishnan 2001 ), namely
Zadeh, Mean, Product and Bounded Sum. As can beobserved, the
mean method is the only one that can assure usthat we would have
more than onealternative to choosefrom.For example, if part type B
cannot be selected for any reasonby using any method but mean , we
would not have a sec-ond choice. In fact, mean would leave us to
choose a secondalternative (part type C) and a third alternative
(part type A).
In the present study, the evaluation of the overall
contri-bution of the fuzzy membership function of each part
typedetermines the sequence of the jobs in a given batch.
Twomethods: fuzzy-job and fuzzy-machine are proposed.
Thesestrategies are mainly used to choose the jobs and machinesin
the sequence.
Fuzzy-job
Job sequencing is determined by evaluating the overall
con-tribution of the fuzzy membership function of the part typeto
the optimal performance of the system. The various mem-
bership functions included for fuzzy-job are dened below.
Th ( p): The throughput of part type p is dened by amembership
function that is dened as the ratio of the dif-ference between the
maximum total processing time PT of the part types, and the total
processing time of the part type p to the difference between the
maximum and minimumtotal processing time of the part types. This
membershipevaluates the contribution of the part type to maximize
thethroughput of the batch. This can be expressed as:
Th ( p) = MaxPT PT ( p) MaxPT MinPT , 0 Th ( p) 1, (6)
where MaxPT = maximum processing time of part types, MinPT =
minimum processing time ofpart types,and PT(p)=total processing
time of part type p.
PT ( p) is dened by PT ( p) = N ( p) M
m= 1
PT ( p, m),
(7)
where N(p) = number of jobs for part type p, m = machinenumber,
m = 1,2,3,,M, M = number of machines, andPT ( p,m) = processing
time of part type p on machine m.
P ( p): The membership function for the penalty of parttype p is
dened as the ratio of the difference between themaximum total
penalty TP of the part types, and the totalpenalty of the part type
p to the difference between themaximum and minimum total penalty of
the part types.This membership evaluates the contribution of the
parttype to minimize the total penalty due to late jobs. Thiscan be
expressed as:
1 3
-
8/10/2019 fulltext 14.pdf
5/12
J Intell Manuf (2008) 19:421432 425
Table 1 Example of intersection methods
Part type # Of parts Jobs # M1 M2 M3 A(p) B(p) C (p) Z M P B
A 2 1,2 4 2 0 0 0.40 0.50 0 0.32 0 0B 3 3,4,5 0 3 0 0.50 1 1
0.50 0.83 0.50 0.50C 1 6 0 5 1 1 0 0.5 0 0.50 0 0
M1, M2, and M3 are machine 1 through 3; ZZadeh; MMean; PProduct;
BBounded sum
P ( p) = MaxTP TP ( p) MaxTP MinTP
, 0 P ( p) 1, (8)
where MaxTP = maximum total penalty of part types, MinTP =
minimum totalpenalty of part types,and TP(p) =total penalty of part
type p.
TP ( p) is dened by TP ( p) = DD ( p)
P ( p), (9)
where DD(p) = due date of part type p, and P(p) = penaltyof part
type p.
IC ( p) : The membership function for the machine idlecost of
part type pis dened as the ratio of the differencebetween the total
machine idle cost of part p , and the min-imum total machine idle
cost of the parts to the differencebetween the maximum and minimum
total machine idlecost of the part types. This membership evaluates
the con-tribution of the part type to minimize the total
machineidle cost when producing the batch. This can be
expressedas:
IC ( p) =C ( p) MinC
MaxC MinC , 0 IC ( p) 1, (10)
where MaxC = maximum total machine idle cost of parttypes, MinC
= minimum total machine idle cost of parttypes, and C(p) = total
machine idle cost for part type p.
C ( p)is dened by C (p) = M
m= 1
U I C (m), (11)
where
U =
1, if machine is needed for processing thepart type p, and
0, if machine is not needed for processingthe part type p,
and
IC (m) = machine idle cost of machine m .
T ( p): The membership function for the robot travel timeof part
type pis dened as:
T ( p) =1, if jobs visits 1 machine, and1/ M , if job visits
more than 1 machine ,
where, M = number of machines part type p has to visit.This
membership evaluates the contribution of the parttype to minimize
the total robot travel time when produc-ing the batch.
pO : The overall membership function of part type p is
theaverage mean of the individual membership function of the
penalty, throughput, machine idle cost and robot traveltimes for
part type p. By using the mean method denedearlier, this can be
expressed as:
O ( p) = P ( p) + Th ( p) + IC ( p) + T ( p)
4,
0 O ( p) 1. (12)
Fuzzy-machine
The approach followed is similar to fuzzy-job. However, ins-tead
of evaluating the contribution of the part type to meeting
theobjectivesof thesystem, theevaluation is given by obtain-ing
a membership function for each combination of part typeand machine.
Thus, for fuzzy-job, there would be as manymembership functions as
number of part types, while forfuzzy-machine, there would be as
many membership func-tions as number of part types and machines
each part has tovisit. For example, for the batch given in Table 2,
the num-ber of membership functions for fuzzy-job would be three:(
0 (A), 0 (B), 0 (C) ), andfor fuzzy-machine would be six:( 0
(A,M1), 0 (A,M2), 0 (B,M2) ), ( 0 (B,M3), 0 (C,M3), 0 (C,M4)).
Thevariablesemployed in Table 2 arethoseusedin Table 1.
Although the robot travel time between machines is xedand known,
the total robot travel time required to pick up a
Table 2 Batch example for fuzzy-job and fuzzy machine
Part type # Of parts Jobs # M1 M2 M3 M4
A 2 1,2 4 2 0 0B 2 3,4 0 13 7 0C 2 5,6 0 0 5 8
1 3
-
8/10/2019 fulltext 14.pdf
6/12
426 J Intell Manuf (2008) 19:421432
Table 3 Data for batch #1 to batch #3
Part type # Of parts Job # M 1 M 2 M 3 M 4 DD(p) P(p) PT(p)
TP(p) C(p)
Batch #1A 2 1,2 4 2 0 0 40 3 12 13.3 3B 2 3,4 0 13 7 0 35 2 40
17.5 4C 2 5,6 0 0 5 8 55 4 26 13.75 5 Batch #2
A 3 1,2,3 45 48 0 0 280 4 279 70 3B 2 4,5 0 43 0 42 220 2 170
110 4C 2 6,7 44 0 46 0 220 3 180 73.3 4 Batch #3A 5 1,2,3,4,5 28 32
0 0 480 3 300 60 3B 5 6,7,8,9,10 0 25 30 0 460 2 275 230 4C 5
11,12,13, 14,15 0 0 23 35 440 2 290 220 5
Machine idle cost rate: M1 = 2, M2 = 1, M3 = 3, M4 = 2DD(p)Due
date of part type pP(p)Penalty of part type pPT(p)Total processing
time of part type pTP(p)Total penalty of part type p, dened by:
DD(p)/P(p)C(p)Total machine idle cost for part type p
part from the input buffer to the time it is deposited in
theoutput buffer will depend on the sequence and schedulingcycle
for the part. This is unknown until the best scheduleis arrived at.
Hence a membership function is included inthe analysis. Values of
penalty time remain constant for eachpart type. These values do not
vary according to the machine.Therefore, these membership functions
are dened as infuzzy-job. The robot travel time between machines is
assu-med to be the same as in fuzzy-job. Throughput and machineidle
cost memberships are dened somewhat differently asdescribed
below.
Th ( p, m): The membership function for the throughputof part
type pon machine m is dened in the same terms asin fuzzy. The
difference is that the processing time is givenby PT(p,m) instead
of PT(p) . Th ( p, m) can be dened as:
Th ( p, m) = MaxPT PT ( p, m) MaxPT MinPT
,
0 Th( p, m) 1, (13)
where MaxPT = maximum processingtime of combinations
part-type/machine, and MinPT = minimum processing time of
combinations part-type/machine.
IC ( p, m) : The membership function for the machineidle cost of
part type p on machine m is dened as before,except that instead of
the total machine idle cost C of part p, the membership function is
dened in terms of machineidle cost of part p on machine m . IC ( p,
m) canbe denedas:
IC ( p, m) = IC (m) MinIC MaxIC MinIC
,
0 IC ( p, m) 1, (14)
where MaxIC = maximum machine idle cost of machines,and MinIC =
minimum machine idle cost of machines.
An illustrative numerical example is provided below for
asampledata (batch #1) shown in Table 3. For fuzzy-job, thereare
three membership functions that are evaluated: o ( A), o ( B), o (C
) . Thenumericalresults resultingmem-bership functions are shown in
Table 4. As can be noticed,
part type C (machine M3) would be the rst in the
sequencefollowedby part type A (machine M1), andnally part type
B(machine M2). For the fuzzy-machine method, membershipfunctions
are expressed in terms of part type and machine.For the combination
of part type A and machine M1, thevarious membership functions are
given in Table 5.
The results presented in Table 5 indicate that the sequencewould
be Part type C-MachineM3,Part type A-M1, Part typeA-M2, Part type
C-M4, Part type B-M3, and Part type B-M2.
Validation of the proposed methodologies
In order to compare the performance of various schedul-ing
options, a set of data that produces a wide variety of
Table 4 Numerical results for fuzzy-job
Part type P ( p) Th ( p) IC ( p) T ( p) O ( p)
A 1 1 0 0.50 0.62B 0 0 0.50 0.50 0.25C 0.89 0.50 1 0.50 0.72
1 3
-
8/10/2019 fulltext 14.pdf
7/12
J Intell Manuf (2008) 19:421432 427
Table 5 Numerical results for fuzzy-machine
Part type/ P ( p, m ) Th ( p, m) IC ( p, m) T ( p, m) O ( p,
m)machine
Part A, M1 1 0.81 0.50 0.50 0.70Part A, M2 1 1 0 0.50 0.62Part
B, M2 0 0 0 0.50 0.12Part B, M3 0 0.54 1 0.50 0.51
Part C, M3 0.89 0.72 1 0.50 0.77Part C, M4 0.89 0.45 0.50 0.50
0.58
part processing requirements and due dates were generated.The
effect of due date penalties is reected by variations indue date
indicated. All the data were randomly generated tostudy the effect
of variations in processing times, process-ing requirements and due
dates. Comparisons were made interms of machine idle cost,
tardiness cost, and throughputresulting from employing different
strategies.
The different models presented were implemented on apersonal
computer using Borland C++. Calculations weremade to determine the
contribution of each part type to thechosen objectives. Upon
initiation of the program, the useris prompted to enter the
customer specied data (1 in Fig. 1)followed by processing data (2
in Fig. 1). The program thenprovides a choice to initiate
sequential (3 in Fig. 1) or non-sequential processing (4 in Fig.
1). For both the options onemay choose either prioritizing Loading
or Unloading(5 or 6 in Fig . 1).
If sequential processing is chosen, a part is loaded only if the
rst machine in the series of machines that the part needsto go is
free. It is likely that there may be more than one partas a
suitable candidate for loading and the following order of priority
is implemented. First priority goes to the rst part inthe order of
feasible parts that needs the currently least occu-pied station
(e.g., a station having the fewest waiting parts).If there are more
than one station, then the priority will beassigned to the station
that is most in demand by the parts inthe current batch. Algorithm
will search for all the possiblecandidate part and generate the
sequence as well as setup therobot programs. For non-sequential
processing, the processof part selection goes through the same
order of priorities asdened for sequential process. However, in
this case, a partis a candidate providing one of its machining
requirementsis met. There are two additional criteria in the case
of non-sequential processing. Thepart to be loaded, after having
metall the other requirements, must go through a conict check.The
conict check is a subroutine that ensures that, if a partis loaded
into the system, it will not cause a blockage to thefurther
processing of parts.
The next choice is either to prioritize Loading of Unloading.
For loading priority, the following options indecreasing order of
importance are followed: (i) load amachine with a part from the
input buffer; (ii) shift part from
onestation to another; (iii) unloada nished part to
theoutputbuffer; and (iv) move the robot and wait at the next
stationneeding unloading. The unload priority follows the
optionslisted next in decreasing order of priority: (i) Unload a
part; (ii) If option is not possible, then consider shifting a
partfrom one station to the next; (iii) if shifting is not an
option,then it may load a part: and (iii) if none of the above is
possi-
ble then move the robot to a station that has almost
nishedmachining and will be waiting to be unloaded.
The last step in the program (7 in Fig. 1) provides the userwith
the ability to run the different options of schedulingalgorithms.
The various options and the key steps are shownin gure. When the
program is executed, it enters into a loopand continues until all
the parts are processed. Inside eachloop, an internal
variablechecksfor both a loading or unload-ing priority. This
internal variable will lead the sequence of operations within the
loop: loading, shifting, unloading, andmoving and waiting. A
look-ahead feature built within theprogram, seeks to reduce the
throughput time of a batch bysaving extra travel time of therobot.
Instead of waiting for thenext part to be nished, the robot keeps
track of which partsare almost done and goes next to the
corresponding station,thus saving movement time. If the user wishes
to comparevariousoptions of scheduling andautomatically
picktheopti-mal scheduler, then the choiceALL will be selected and
thesoftware will automatically generate the results shown laterin
both graphical form as well as text le. The output fromthis choice
is eventually used for controlling the entire oper-ation of
scheduling and controlling robot moves.
The sequence follows the order in which the machinesare
numbered. However, it is important to clarify that themethodology
proposed has the capability of processing anysequence. The sequence
followed is only for illustrative pur-poses. For a sample data
(batch #2) presented in Table 3, thesequence for part type A is
M1M2, for part type B, it isM2M4 and M1M3 for part type C. The part
processingis simulated using a loading priority. Some attributes
can benoticed for this batch. The part type with the longest
process-ing time (part type A) is also the part with the longest
duedate, and it has the highest penalty for tardiness. Besides,
thepart with the shortest processing time andshortest machiningtime
(part type Bmachine M2) has the lowest penalty andthe earliest due
date. Choosing the right sequence to reachmultiple production goals
is challenging in view of the con-icting objectives. It is known
that choosing parts with theshortest processing time usually gives
the best throughput.For this batch, the part with the shortest
processing time (parttype B) has the lowest tardiness penalty.
However, it may bebenecial to start the process by choosing the
part with thehighest penalty in order to avoid high production
costs. Thefuzzy methodologies presented look at these aspects and
nda middle ground so that all the objectives can be fullled asfar
as possible.
1 3
-
8/10/2019 fulltext 14.pdf
8/12
428 J Intell Manuf (2008) 19:421432
Fig. 1 Flowchart of theprogrammed logic Inp ut customer
specified data: part #, n umber of parts, seq uence in the case of
seq uential processin g,
and d ue date/penalty data for parts. (1)
Input prod uction data: idle rate of machines, and fixed robot
move times within the cell. (2)
Non seq uential processin g (4)Seq uential processin g (3)
Priority-Loadin g (5) Priority- unloadin g (6) Priority-Loadin g
Priority- unloadin g
Choose one of : (7)SPT-Seq uence jobs in
increasin g order of theirprocessin g times ( PT)
amon g the manycombinations of job(j) andmachine (m).
Implement
eqn.(1).
WEDD-Seq uence jobs inincreasin g order of the
ration of the d ue date of the job(DD) to the penalty ofthe job
( P) assi gned when
the job is late.
SPTWEDD
Fuzzy-Machine (FM)Fuzzy-Job (FJ)ALL
Implement eqn.(2).
FM-determine job seq uencin g byeval uatin g the overall contrib
ution of the
f uzzy membership f unction of the parttype to the optimal
performance of the
system by using equations 6 thro ugh 12
FJ-determine job seq uencin g byeval uatin g the overall contrib
ution of the
f uzzy membership f unction of the parttype to the optimal
performance of the
system by using equations 13 and 14 and12.
ALL-determine job seq uencin g for S PT,WEDD, FM, and FJ individ
ually and
pick the optimal sol ution and store thedata.
0%
20%
40%
60%
80%
Machine idlecost
Tardiness cost Throughputtime
Criteria
r e P
n e c
t a g e
f o i m p r o
m e v
n e t
o f f u z z y v o e r
S P T &
D E W
D
Improvement of fuzzy over SPT Improvement of fuzzy over WEDD
Fig. 2 Percentage difference of improvement of fuzzy-job and
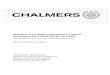
fuzzy-machine with respect to SPT and WEDD for batch #2
Results for batch #2 are shown in Fig. 2. This gure showsthe
resulting improvement when using fuzzy-job and fuzzy-machine over
SPT and WEDD. The bar graph comparesthe performance of the
different strategies. The percentagedifference of improvement is
dened as given below. Forthis particular case, the strategies
selected are fuzzy-job andfuzzy-machine, and the strategies to
which comparison ismade are SPT and WEDD.
difference of improvement = 100
measure of criterion obtained from the strategiesselected
measure of criterion obtained from the strategiesto which
comparison is made
For thisbatch, fuzzy-joband fuzzy-machineproduce iden-tical
performance, and the gure presents the results usingthem as base
line. In this example, SPT chooses part type Brst. Part type B has
the smallest processing time, and thehighest due date over penalty
ratio. At the same time, SPTtends to leave part type A for
processing to the end. Part typeA hasthe highest penalty;
therefore, tardinesscostwould tendto be higher (Fig. 2). On the
other hand, WEDD chooses parttype A, which has the lowest due date
over penalty ratio.However, that part type has a very long
processing time,which at the end gives rise to a long robot idle
time, andthus a longer throughput time. This produces a very
hightardiness cost. Fuzzy-job and fuzzy-machine perform 71%better
than WEDD in this case. Although, it is expected thatWEDD would
tend to give the best results when it comes totardiness criterion,
it did not turn out to be so since WEDDdoes not take into account
processing times.
1 3
-
8/10/2019 fulltext 14.pdf
9/12
J Intell Manuf (2008) 19:421432 429
0%2%4%6%8%
10%12%
Machine idlecost
Tardiness cost Throughputtime
Criteria
n e c r e P
g a t e o
f i m p r o
n e m e v
t
D D E W r e v o y z z u f
f o
Fig. 3 Percentage difference of improvement of fuzzy-job and
fuzzy-machine with respect to WEDD for batch #3
The analysis was repeated using data (batch#3) presentedin Table
3. In this case, part type A has the longest due dateand the
highest tardiness penalty. Part type B has the small-est processing
time, while part type C has values in between,and the shortest
processing time (machine M3). Results forthis batch are shown in
Fig. 3. Fuzzy-job and fuzzy-machinend a middle ground by initially
choosing part type C. SPTchooses part type C as well, since it has
the lowest process-ing time. Results show the same performance for
fuzzy-job,fuzzy-machine and SPT. There is a 10.7% improvement
overWEDD in terms of tardiness cost.
In order to study whether further enhancement can beobtained by
any of the different strategies, further analy-sis was done using
an unloading priority. In some cases,when using an unloading
priority, results tend to be better.The results cannot be
generalized. For illustration purposes,results for batch #3, using
an unloading priority are shown
in Fig. 4. As seen in this gure, unloading priority yieldsbetter
results than loading priority. In order to verify whe-ther this is
true, three more tests using data shown in Table 6labeled as batch
#4, 5, and 6 were analyzed. Once again,fuzzy-job and fuzzy-machine
are compared against SPT andWEDD, but taking into account loading
and unloading prior-ity. There are eight combinations
(methodology-priority) in
total. In addition, when parts have the same processing
time,comparisons are also made to a relevant study ( Balakrishnanet
al. 2001 ). Results are shown in Figs. 57. The tables andgures
indicate the improvement in percentage of the bestperformance
compared to the worst, and the improvement of the best methodology
compared to SPT.
The results pertaining to data (batch#4 in Table 6) areshown in
Fig. 5. It is clear that fuzzy-job outperforms theother
methodologies. For fuzzy-methodology, there is alsoa remarkable
similarity between the results of loading andunloadingpriority,
except in termsof tardinesscost. Althoughunloading priority is 1.8%
better than loading priority in tar-diness cost criterion, the
percentage difference is too smallto conclude that the fuzzy-job
with unloading priority yieldsthe best results. In terms of robot
idle time, there is not muchdifference in performance between the
priorities. For thisspecic case, comparisons against Hathouts
heuristics arepossible since processing times are equal. However,
thesecomparisons are only possible in terms of throughput
sinceHathouts problem does not take into account other criteria.The
throughput time for an identical batch of parts with
load-ingpriority producesa 7.5%improvement for fuzzy-jobstrat-egy
in comparison to Hathouts. No consistent pattern couldbe observed
in regards to thestrategy that performedworst.
Fig. 4 Loading versusunloading priority for batch #3
0700
1400210028003500
FUZZY-J FUZZY-M SPT WEDD T o
t l a
h c a m
i n i e
d l e o c
) $ ( t s
LOAD UNLOAD
0
400
800
1200
1600
FUZZY-J FUZZY-M SPT WEDD T o t l a
d r a t
i n
o c s s e
) $ ( t s
LOAD UNLOAD
(a ) M achine i d le cost (b) T a r d iness cost
500
550
600
650
700
FUZZY-J FUZZY-M SPT WEDD
r h T
m i t t u p
h g u o
e s ( )
LOAD UNLOAD
(c) Thro ug hpu t time
1 3
-
8/10/2019 fulltext 14.pdf
10/12
430 J Intell Manuf (2008) 19:421432
Table 6 Data for batch #4 through batch #6
Part type # Of parts Job # M 1 M 2 M 3 M 4 DD(p) P(p) PT(p)
TP(p) C(p)
Batch #4A 3 1,2,3 15 18 0 0 120 4 99 30 3B 2 4,5 0 18 0 12 140 2
60 70 4C 2 6,7 15 16 0 0 130 3 62 43.3 4 Batch #5
A 4 1,2,3,4 85 85 0 0 840 1 680 840 3B 5 5,6,7,8,9 0 85 0 85 870
2 850 435 4C 3 10,11,12 0 0 85 0 760 3 255 253.3 1 Batch #6 A 4
1,2,3,4 48 43 0 0 440 1 364 440 3B 5 5,6,7,8,9 0 41 0 49 470 2 450
235 4C 3 10,11,12 0 0 45 0 310 3 135 103.3 1
0%
10%
M achine idle cost Tardiness cost T hroughput time
Criteria
n e c r e P
g a t
e
i m p r o
n e m e v
i t n
e p r f r o m a c n e
FUZZY-J LOAD SPT HATHOUT'S
-
FUZZY-J UNLOAD
Fig. 5 Performance plotsbatch #4
0%
20%
40%
60%
80%
Machine idle cost Tardiness cost Throughput time
Criteria
e P r c e n a t
e g
f o
i m p r o
n e m e v
o t
h t r e v
e
w o
p t s r
e o f r
n a m r
c e
FUZZY-M LOAD SPT HATHOUT'SFUZZY-M UNLOAD
Fig. 6 Performance plotsbatch#5
In the case of batch #5 given in Table 6, fuzzy-machine hasthe
best performance as shown in Fig. 6. As in the previousexample,
loading and unloading priority give similar results.Loading
performance is better by 35.3% for tardiness cost.In terms of
throughput, unloading and loading have the sameperformance; however
the robot idle time for the unloadingpriority is longer, which
means less robot-related produc-tion cost. The difference is 0.8%.
This difference is minimal;hence, it can be concluded that
fuzzy-machine with load-ing priority has the best performance. For
this specic case,comparisons against Hathouts heuristics are also
possiblesince all processing times are equal to 85 seconds. In
termsof throughput, Hathouts heuristics gives identical results
tothose obtained using fuzzy-machine.
Forthe next case, batch#6 given in Table 6, SPT and
fuzzy-machine have the best performance, as shown in Fig. 7.
FUZZY-J UNLOAD
0%
20%
40%
60%
Machine idle cost Tardiness cost Throughput time
Criteria
n e c r e P
g a t
e
i m p r o
n e m e v
i t n
p e o f r
n a m r
c e
FUZZY-J LOAD SPT-LOAD SPT-UNLOAD
Fig. 7 Performance plotsbatch #6
Unloading priority for both methodologies seems to performbetter
than loading priority except in tardiness cost criteria.An
important factor to be noticed is that, unloading is better(>
6%) than loading priority in all cases. Nevertheless, whenloading
is better in tardiness criteria, the difference is 23%.Thus, SPT
and fuzzy-machine with loading priority have the
best performance.
Summary of results
The results from a total of thirty batches were compiled.Figs.
810 show the percentage of how many times the meth-odology-priority
combination was the best in the thirty trials.For compactness,
letters represent the combination method-ology-priority. For
example, FJ means fuzzy-job, FM meansfuzzy-machine, W and S mean
WEDD and SPT respectively.Likewise, L and U represent loading and
unloading priority,respectively.
The rst aspect to analyze is the performance of the
meth-odologies with respect to the machine idle cost criterion(Fig.
8). Fuzzy-job has the best performance. It is best 56.6%of the time
with unloading priority, and 53.3% of the timewith loading
priority. SPT and WEDD with loading priorityhave the worst
performance. Unloading priority seems toyield somewhat better
results than the loading priority.
For the tardiness cost criterion (Fig. 9), fuzzy-job
withunloading priority has the best performance followed by
1 3
-
8/10/2019 fulltext 14.pdf
11/12
J Intell Manuf (2008) 19:421432 431
0%
10%
20%
30%
40%
50%
60%
FJ-L FJ-U FM-L FM-U W-L W-U S-L S-U
Methodology-priority
n e c r e P
g a t
e o
f i t
a s e m
m e
y g o l o
d o
h t
r p -
i r o
y t i
s i
e b s t
Fig. 8 Performance for machine idle cost criterion
0%
10%
20%
30%
40%
50%
60%
FJ-L FJ-U FM-L FM-U W-L W-U S-L S-U
Methodology-priority
n e c r e P
g a t
e o
f i t
a s e m
m e
y g o l o
d o
h t
r p -
i r o
y t i
s i
b
t s e
Fig. 9 Performance for tardiness cost criterion
0%
10%
20%
30%
40%
50%
60%
FJ-L FJ-U FM -L F M-U W-L W-U S-L S-U
Methodology-priority
n e c r e P
g a t
e o
f i t
a s e m
m e
y g o l o
d o
h t
r p -
i r o
y t i
s i
b
t s e
Fig. 10 Performance for throughput criterion
fuzzy-job with loading priority. Indeed, it was expected
thatunloading priority would perform best in terms of the
tar-diness criterion since jobs would be unloaded faster,
thusreducing tardinesscosts. However,this is notalways thecase.For
instance, the loading priority performs better for fuzzy-machine
and SPT. WEDD with the loading priority showingthe worst
performance, followed by SPT.
In terms of throughput criterion (Fig. 10), results are
verysimilar to before, fuzzy-job with unloading priority showingthe
best performance. SPT and WEDD with loading priorityhave the worst
performance. In general, fuzzy-job with theunloading priority gives
the best results; SPT and WEDD
show poor performance. Furthermore, the unloading prior-ity
usually performs better than the loading priority, exceptfor the
tardiness cost criterion, where results are difcult
togeneralize.
Conclusions and recommendations
The performance of the proposed fuzzy logic based method-ologies
is very promising. They have shown much better per-formance than
traditional dispatching rules such as SPT and
WEDD in a multi-objective scheduling environment. SPTandWEDD
maystill be good when considering singleobjec-tives such as
maximizing the throughput time or minimizingthe tardiness cost,
respectively. This work has shown thatfuzzy methodologies are able
to combine several objectivesfor effective scheduling of jobs. The
results presented alsoshow that fuzzy-job is more effective than
fuzzy-machine.
As indicated before, the difference in performance can
beattributed to the way each strategy analyzes the contributionof
the jobs to reach the objectives. Fuzzy-job considers theattributes
of the job only, while fuzzy-machine evaluates thecontribution of
the job-machine combination. The enhance-ment in performance shown
by the fuzzy-job comes fromanalyzing each job, keeping in
perspective all the machinesand their ability to process a set of
jobs that constitutes abatch. It does not restrict the analysis to
just a job-machinecombination. The results also indicate a slight
difference inperformance between SPT and WEDD. SPT has a tendencyto
perform better in machine idle cost and throughput timecriteria,
while WEDD performs better in tardiness cost cri-terion.
For the tardiness cost criterion, the unloading priority
hasproved to be the best priority for fuzzy-job and WEDD,while the
loading priority has been the best choice for fuzzy-machine and
SPT. In regards to improving the machine idlecost and throughput
time, unloading priority turns out to bethebestpriority. The
methodologiesweresuccessfully imple-mented in an automated machine
cell. The two strategiesperformed quite well and the results
obtained from simula-tion (off-line) show only a marginal
difference with thosefrom actual implementation (online). The
slight differenceis unavoidable due to the preset control
architecture of therobot and communication aspects.
The capability of the custom designed software used toevaluate
the performance of the two strategies can be effec-tively used for
simulations (off-line) and actual implemen-tations (online). The
software has the ability of producingsimulation in text or graphic
mode for valuable data col-lection for further studies. An example
is the generation of different sequences for a wide variety of
batches for SPT,WEDD, fuzzy-job and fuzzy-machine methodologies, or
allof them. When the sequences of all the methodologies
aredisplayed, comparisons of the performance of the strategiesfor
each objective can be easily seen.
The methodology developed has been successfully imple-mented on
a robot based FMC in the research laboratory. Themicroprocessors of
industrial robots are not designed to per-form any
computationsother than what is required formotioncontrol of robot.
Hence an external PC was employed for per-forming all the
computations required for the methodologydeveloped. The algorithm
implemented on a personal com-puter generates the best strategy and
schedule for the selec-ted data set. The robot programs
corresponding to loading
1 3
-
8/10/2019 fulltext 14.pdf
12/12
432 J Intell Manuf (2008) 19:421432
and unloading of machines are then sequenced through aPC based
input/output card which calls the appropriate pro-grams in the
correct sequence. The PC based cell controllerperformed quite well
and clearly demonstrates that it will bepossible to implement the
developed algorithm without anymodications to the cell
architecture. The algorithm is extre-mely fast and has made it
possible to implement the new
fuzzy-based methodology for near real-time control of anFMC. The
effectiveness of fuzzy-job in improving through-put in a
multi-objective environment could be further enhan-ced by
automatically assigning weights to the objectives. Astudy of this
nature would provide much better insight on theimpact of membership
functions on the quality of solutions.This is currently
investigated as part of an on-going study.The useof an adaptive
algorithm is being explored that deter-mines automatically the
weights for various objectives andtheir impacton thequality of
solution. This assignment couldbe complex since there arefour
membership functions, whichcould be, assigned ten weight values
ranging from 0 to 1. Thenumber of possible combinations would be
enormous (10 4).Therearetwo possible waysof assigningand evaluating
theseweights. The rst one could be by using rules, and wouldrequire
substantial user input and further experiments. A sec-ond approach,
which may be more efcient, is by using tech-niques such as genetic
algorithms or neighborhood searchmethods. These approaches may
require substantial compu-tation times, and the improvement in
performance will haveto be evaluated against the computational time
that would beneeded. Studies are also currently underway in
developinga genetic algorithm based approach and the results will
bemade available at the conclusion of the study.
Although non-sequential methodology proved to be moreefcient
than sequential mode, further research can be doneto enhance the
performance of non-sequential mode. In thepresent work, no special
techniques were utilized to check the movements of parts in
non-sequential method. An object-oriented function that checks for
presence of no conicts inpart allocation was utilized. However, by
using intelligenttechniques with look-ahead features, these
conict-checkscan be further enhanced and results for non-sequential
modemay show further improvement.
The proposed methodology can be applied to a wide vari-ety of
manufacturing environments. For example, automatedprinted circuit
board assembly is a clear example of a processthat could benet from
an optimized selection of a combina-tion of sequential and
non-sequential processing. A robotassisted automated cell for
manufacture and assembly of plastic valves with several
sub-components is currentlybeingdeveloped and the industry is keen
in applying the proposedmethodology for controlling the robot
movements within thecell. This process can be categorized as
sequential process-ing. This will provide a great opportunity for
implementingthe developed control strategy in a real-world
application.
References
Agentis, A. (2000). Scheduling no-wait robotic cells with two
and threemachines. European Journal of Operational Research, 123 ,
303314.
Agentis, A., & Pacciarelli, D. (2000). Part sequencing in
three machineno-wait robotic cells. Operations Research Letters, 27
, 185192.
Balakrishnan,S., Hathout,L., & Popplewell, N. (2001).
Sequential ver-
sus Non-sequential loading and inuences on Intra-Cell
sequences.In Proceedings of the IASTED International Conference,
Roboticsand Applications (pp. 95100). ISBN:0-88986-313-X.
Bellman, R. E., & Zadeh, L. A. (1970). Decision-making in a
fuzzyenvironment. Management Science, 17 , 141164.
Brauner, N.,& Finke, G. (2001).Optimal movesof thematerial
handlingsystem in a robotic cell. International Journal of Flexible
Manufac-turing Systems, 74 , 269277.
Chen, S., & Lin, L. (1999). Reducing total tardiness cost in
manufac-turing cell scheduling by a multi-factor priority rule.
International Journal of Production Research 37 (13), 29392956.
Chen, H., Chu, C., & Proth, J. (1997). Sequencing of parts
in roboticcells. The International Journal of Flexible
Manufacturing Systems,9, 81103.
Cox, E. (1998). The fuzzy systems handbook (2nd ed.). New York:
AP
Professional.El-Bouri, A., Balakrishnan, S., & Popplewell,
N. (2000). Sequencing jobs on a single machine: A neural network
approach. European Journal of Operational Research, 126 ,
474490.
Holthaus, O., & Ziegler, H. (1997). Improving job
shopperformance bycoordinating dispatching rules. International
Journal of Production Research 35 (2), 539549.
Jain, A. S., & Meeran, S. (1996). Scheduling a job-shop
using amodied back-error propagation neural network. In Proceedings
of the First Turkish Symposium on Intelligent Manufacturing
Systems(pp. 3031, 462474).
Jawahar, N., Aravindam, S. G., Ponnambalam, S. G., &
Karthikeyan, A.A. (1998). Genetic algorithm-based scheduler for
setup-constrainedFMC. Computers in Industry, 35 , 291310.
Kazerooni, A., Chan, F. T. S., & Abhary, K. (1997).Real-time
operation
selectionin an FMSusing simulationafuzzy approach.
ProductionPlanning & Control, 8 , 771779.
Kutanoglu, E., & Sabuncuoglu, I. (1999). An analysis of
heuristics in adynamic job shop with weighted tardiness objectives.
International Journal of Production Research, 37 (1), 165187.
Moreno, A., & Ding, F. (1993). A constructive algorithm for
concur-rently selecting and sequencing jobs in an FMS environment.
Inter-national Journal of Production Research, 31 (5),
11571169.
Restrepo,I. M.,& Balakrishnan,S. (2001).Fuzzy logic based
robot con-troller for intelligent scheduling. In Proceedings of the
32nd. Inter-national Conference on Applied Modeling and Simulation
(Vol. 2,pp. 358363).
Sannomiya, N., & Iima, H. (1996). Application of genetic
algorithm toscheduling problems in manufacturing processes. In
Proceedings of the IEEE Conference on Evolutionary Computation (pp.
523528).
Sethi, S. P., Chandrasekaran, R., Drobouchevitch, I., &
Sriskandarajah,C. (2004). Scheduling multiple parts in a robotic
cell served by adual-gripper robot. Operations Research, 52 ,
6582.
Yalcin, A., & Boucher, T. (1999). An architecture for exible
manufac-turing cells with alternate machining and alternate
sequencing. IEEE transactions on Robotics and Automation, 15 (6),
11261130.
Vidyarthi, N. K., & Tiwari, M. K. (2001). Machine loading
problemof FMS: a fuzzy-based heuristic approach. International
Journal of Production Research, 39 (5), 953979.
Yager, R. (1978). Fuzzy decision making including unequal
objectives.Fuzzy Sets and Systems, 1 , 8795.
Zadeh, L. A. (1965). Fuzzy sets. Information and Control, 8 ,
338353.
1 3