Embed Size (px)
Citation preview

Full-Scale Testing, Modelling and Analysis
of Light-Frame Structures Under
Lateral Loading
Phillip J. Paevere
A thesis submitted in total fulfilment
of the requirements of the degree of Doctor of Philosophy
February 2002
Department of Civil and Environmental Engineering
The University of Melbourne

Abstract
i

Abstract
ii
Abstract
The differing needs and expectations of building owners, users and society are driving
a change towards a technology-intensive, performance-based approach to the design
and evaluation of light-frame structures. A critical underlying assumption of the
performance-based philosophy is that performance can be predicted with reasonable
accuracy and consistency. Development of improved performance prediction
technologies, for light-frame structures, requires a detailed understanding of the
structural behaviour of light-frame buildings, as well as the environmental loadings to
which they are subjected during their lifetime. Full-scale structural testing in the
laboratory, combined with analytical modelling, are essential in obtaining this
understanding.
This thesis presents the results of experimental and analytical investigations into the
performance of light-frame structures under lateral loading. The specific objectives of
this research are to: 1) develop simple, experimentally validated numerical models of
light-frame structures, which can be used to predict their performance under lateral
loads, particularly seismic loads; and 2) collect experimental data suitable for
validation of detailed finite-element models of light-frame structures.
To meet these objectives, a series of full-scale experiments were conducted on a
North American style single-storey L-shaped timber-frame house. In these
experiments, the distribution of the reaction forces underneath the walls, and the
displaced shape of the house were measured in detail under static and static-cyclic
lateral loading. The natural frequencies of the house were also determined using
dynamic impact tests.
A range of analytical models were developed and validated against the experimental
results. All of the analytical models incorporate pinching, degrading hysteretic
elements, which can accurately simulate the force-displacement, and energy
dissipating characteristics of light-frame structural components under cyclic lateral
loading. System identification methodologies were developed to determine the

Abstract
iii
hysteresis parameters from the experimental results, and to facilitate linking of the
different models. The analytical models were then used to conduct deterministic and
stochastic response analyses of light-frame structures under earthquake loading, and
to examine the response sensitivity to the model type, and the assumed structural
period and damping.
The experimental results have provided the most detailed picture of the reaction
forces beneath a non-symmetrical light-frame structure, under lateral loading, ever
recorded. They have shown that there is potential for significant sharing and
redistribution of applied lateral load, between the external shear-walls of a light-frame
house, through the roof and ceiling diaphragm, under both elastic and inelastic
response conditions. The most commonly used design techniques for lateral load
distribution in light-frame structures do not allow for such sharing of load between the
walls.
The analytical modelling results have shown that relatively simple modelling
strategies can be used to simulate the lateral load-sharing characteristics that were
observed in the experiments with reasonable accuracy. The importance of the
interaction between the shear-walls, and the effect of this interaction on seismic
performance prediction was also highlighted by the modelling work. The results
showed that the single-storey test house is highly unlikely to collapse under
earthquake loading due to direct shaking, even for a large event, but could sustain
significant damage. It was demonstrated that the inherent uncertainties due to the
random nature of seismic excitation, and the assumptions used in the modelling
process, have a significant effect on the predicted performance of light-frame
structures.

Statement
iv
Statement
This thesis comprises only the author’s original work, except where due
acknowledgement is made in the text. To the best of the author’s knowledge, this
thesis contains no material previously published or written by another person, except
where due reference is made in the text, or indicated in the Preface of this thesis. This
thesis contains no material which has been accepted for the award of any other degree
or diploma in any university or other institution. This thesis is less than 100,000
words in length, exclusive of figures, tables, references and appendices.
Phillip Paevere
September 2001

Acknowledgements
v
Acknowledgements
It is a great pleasure to acknowledge the valuable contributions of the many people
who have helped to make this project possible. Firstly, thankyou to my supervisors,
Dr. Greg Foliente (CSIRO), and Associate Professor Nick Haritos (The University of
Melbourne) for their guidance, patience and encouragement, which has been
invaluable.
Thank you also, to the following people for their assistance, advice and support
relating to the experimental work: Jay Crandell of the NAHB Research Center, for
providing the test house details and advice on various aspects of the experimental
program; Dr. Emad Gad from The University of Melbourne for his assistance in the
dynamic house testing; Lyndon Macindoe and Rod Banks of CSIRO, for the design of
the experimental instrumentation systems; Craig Seath of CSIRO for his work in
building the house; and the CSIRO workshop team for their expert assistance in
constructing various laboratory equipment.
I would also like to express my appreciation to the CSIRO, the NAHB Research
Center, and The University of Melbourne for their financial and in-kind support for
this project.
Finally, I would like to thank my wife Bridget, and our three children, Patrick, Lydia
and Jasper for the joy and inspiration they have provided during the course of my PhD
studies.

Table of Contents
vi
Table of Contents
Abstract ..................................................................................... ii
Statement....................................................................................iv
Acknowledgements.....................................................................v
Table of Contents ......................................................................vi
List of Tables ........................................................................... xii
List of Figures ..........................................................................xiv
Notation .....................................................................................xx
Abbreviations..........................................................................xxv
Preface ....................................................................................xxvi
CHAPTER 1 Introduction and Overview ..............................1
1.1 Background.................................................................................................. 1
1.2 A Framework for Combined Experimental and Analytical
Analysis of Light-Frame Structures .......................................................... 2
1.3 A Framework for Improving Design Procedures..................................... 5
1.4 Performance-Based Design and Evaluation ............................................. 6
1.5 Overview of Common Design Procedures used for Lateral Load
Distribution .................................................................................................. 7
1.6 Summary of Research Needs and Opportunities ................................... 10
1.7 Project Objectives and Scope ................................................................... 11
1.7.1 Overall Objectives of Research Program................................................ 11
1.7.2 Specific Objectives and Scope of the Work Presented ........................... 12
1.8 The CUREE Caltech Woodframe Project .............................................. 13

Table of Contents
vii
1.9 Thesis Overview......................................................................................... 14
1.9.1 Structure of Literature Review................................................................ 14
1.9.2 Structure of Thesis .................................................................................. 15
CHAPTER 2 Experiment Description and Results.............17
2.1 Introduction ............................................................................................... 17
2.2 Overview of Light-Frame Testing............................................................ 19
2.2.1 Introduction ............................................................................................. 19
2.2.2 General Behaviour of Light-Frame Systems and Components............... 20
2.2.3 Whole Building Testing of Light-Frame Structures ............................... 22
2.2.4 Summary of Research Needs and Opportunities – Light-Frame
Testing..................................................................................................... 26
2.3 Experiment Description............................................................................ 32
2.3.1 Background ............................................................................................. 32
2.3.2 Testing Program ...................................................................................... 33
2.3.3 Description of the Test House................................................................. 34
2.3.4 Load and Reaction Measurement............................................................ 44
2.3.5 Displacement Measurement .................................................................... 47
2.3.6 Data Management ................................................................................... 47
2.3.7 Documentation ........................................................................................ 51
2.4 Elastic Testing............................................................................................ 51
2.4.1 Introduction ............................................................................................. 51
2.4.2 Test Description ...................................................................................... 51
2.4.3 Elastic Testing Results ............................................................................ 52
2.5 Dynamic Impact Testing........................................................................... 67
2.5.1 Experiment Description........................................................................... 67
2.5.2 Experiment Results and Discussion ........................................................ 68
2.5.3 Comments on Experiment....................................................................... 70
2.6 Destructive Testing.................................................................................... 75
2.6.1 Introduction ............................................................................................. 75
2.6.2 Loading Mechanism................................................................................ 75
2.6.3 Global Hysteresis Response .................................................................... 78

Table of Contents
viii
2.6.4 Individual Wall Hysteresis Responses .................................................... 80
2.6.5 Ceiling Diaphragm Hysteresis Responses............................................... 87
2.6.6 Displaced Shapes..................................................................................... 88
2.6.7 Load Distribution .................................................................................... 89
2.6.8 Damage Status......................................................................................... 90
2.6.9 Comments on Experiment..................................................................... 107
2.7 Conclusions .............................................................................................. 108
2.7.1 Elastic Testing ....................................................................................... 109
2.7.2 Dynamic Impact Testing ....................................................................... 110
2.7.3 Destructive Testing ............................................................................... 111
2.7.4 Recommendations for Further Research ............................................... 112
CHAPTER 3 Hysteresis Modelling .....................................115
3.1 Introduction ............................................................................................. 115
3.2 Overview of Hysteresis Modelling ......................................................... 116
3.2.1 Introduction ........................................................................................... 116
3.2.2 Phenomenological Hysteresis Models .................................................. 116
3.2.3 Phenomenological Versus Mechanics-Based Hysteresis Models......... 127
3.2.4 Sensitivity of Response to Hysteresis Modelling.................................. 131
3.3 Overview of System Identification......................................................... 136
3.3.1 Introduction ........................................................................................... 136
3.3.2 System Identification Methodology...................................................... 138
3.4 Differential Hysteresis Model Formulation .......................................... 139
3.4.1 Introduction ........................................................................................... 139
3.4.2 Model Formulation................................................................................ 140
3.5 System Identification of Hysteresis Parameters ................................... 143
3.5.1 Introduction ........................................................................................... 143
3.5.2 System Identification for a Range of Different Systems....................... 144
3.5.3 Parallel System Identification ............................................................... 146
3.5.4 Identification of Hysteresis Parameters for Whole-Building Test
Data ....................................................................................................... 148
3.6 Summary and Conclusions..................................................................... 167

Table of Contents
ix
CHAPTER 4 Structural Modelling.....................................169
4.1 Introduction ............................................................................................. 169
4.2 Overview of Seismic Response Analysis Techniques and
Structural Modelling of Light-Frame Structures ................................ 171
4.2.1 Background ........................................................................................... 171
4.2.2 Static Analysis....................................................................................... 173
4.2.3 Pushover Analysis ................................................................................. 174
4.2.4 Time-History Analysis .......................................................................... 175
4.2.5 Response Spectrum Analysis ................................................................ 177
4.2.6 Monte Carlo Simulation........................................................................ 179
4.2.7 Random Vibration Analysis and Equivalent Linearisation................... 180
4.2.8 Whole-Building Models of Light-Frame Structures. ............................ 183
4.2.9 Scope of Structural Modelling and Seismic Response Analysis in
Current Work......................................................................................... 187
4.3 SDOF model............................................................................................. 189
4.3.1 Background ........................................................................................... 189
4.3.2 Formulation ........................................................................................... 189
4.3.3 Equivalent Linearisation of SDOF model............................................. 190
4.3.4 Extension of SDOF Model to MDOF Systems..................................... 191
4.4 Hysteretic Shear-Building Model .......................................................... 191
4.4.1 Background ........................................................................................... 191
4.4.2 Matrix Formulation ............................................................................... 192
4.3.4 State Vector Formulation ...................................................................... 196
4.4.4 Equivalent Linearisation of Hysteretic Shear-Building Model............. 197
4.5 Hysteretic Shear-Wall Model ................................................................. 202
4.5.1 Background ........................................................................................... 202
4.5.2 Formulation ........................................................................................... 203
4.6 Finite Element Model.............................................................................. 205
4.7 Hybrid Response Analysis ...................................................................... 208
4.7.1 Background ........................................................................................... 208
4.7.2 Formulation ........................................................................................... 209
4.8 Summary and Conclusions..................................................................... 211

Table of Contents
x
CHAPTER 5 Seismic Response Analysis ...........................213
5.1 Introduction ............................................................................................. 213
5.2 Ground Motions ...................................................................................... 214
5.2.1 Introduction ........................................................................................... 214
5.2.2 CUREE Ground Motions ...................................................................... 214
5.2.3 SAC Suite of Ground Motions.............................................................. 215
5.3 Deterministic Seismic Response Analyses Using SDOF and Shear-
Building Models....................................................................................... 221
5.3.1 Introduction ........................................................................................... 221
5.3.2 Response Analysis of Test House Using SDOF Model........................ 221
5.3.3 Response of Three-Storey Building Using Shear-Building Model....... 243
5.4 Stochastic Response Analyses Using Equivalent Linearisation .......... 249
5.4.1 Introduction ........................................................................................... 249
5.4.2 Single-Storey Timber-Frame House ..................................................... 250
5.4.3 Three-Storey Timber-Frame Building .................................................. 255
5.5 Seismic Response Analyses using Hysteretic Shear-Wall Model........ 259
5.5.1 Introduction ........................................................................................... 259
5.5.2 Shear-Wall Model Details..................................................................... 260
5.5.3 Comparison Between Shear-Wall Model and Experimental
Responses .............................................................................................. 264
5.5.4 Comparison Between Shear-Wall Model and SDOF Model
Responses .............................................................................................. 266
5.5.5 Comparison Between Shear-Wall Model Response Under Uni-
Directional and Bi-Directional Excitations ........................................... 270
5.5.6 Analysis of Seismic Demands on Individual Walls Under Bi-
Directional Earthquakes ........................................................................ 270
5.6 Summary and Conclusions..................................................................... 278
5.6.1 Sensitivity Study of Single-Storey House Using SDOF Model............ 278
5.6.2 Response Analysis of Example Three-Storey Building Using Shear-
Building Model ..................................................................................... 279
5.6.3 Stochastic Response Analysis Using Equivalent Linearisation ............ 280
5.6.4 Response Analysis of Test House Using Shear-Wall Model................ 281

Table of Contents
xi
CHAPTER 6 Summary, Conclusions and
Recommendations ..................................................................285
6.1 Key Findings ............................................................................................ 285
6.2 Detailed Summary and Conclusions...................................................... 287
6.2.1 Introduction ........................................................................................... 287
6.2.2 Full-Scale Experiments on L-Shaped Test-House ................................ 287
6.2.3 Hysteresis Modelling and System Identification .................................. 289
6.2.4 Structural Modelling ............................................................................. 290
6.2.5 Seismic Response Analysis................................................................... 291
6.3 Recommendations for Further Research .............................................. 295
CHAPTER 7 References ......................................................299
APPENDIX A Summary of Full-Scale Elastic Testing
Results .....................................................................................315
APPENDIX B Summary of Full-Scale Destructive
Testing Results........................................................................331
APPENDIX C Generalised Reduced Gradient
Algorithm ................................................................................361
APPENDIX D Equivalent Linearisation Coefficients.......363
APPENDIX E Publications Arising From Research.........367

List of Tables
xii
List of Tables
Table 2.1 – Summary of full-scale experiments on timber structures (Fischer et
al. 2001)............................................................................................................... 28
Table 2.2 – Summary of full-scale experiments on light-frame structures. ................ 29
Table 2.3 – Summary of test house construction and materials.................................. 37
Table 2.4 – Summary of elastic testing program. ....................................................... 56
Table 2.5 – Results summary for elastic tests. ............................................................ 64
Table 2.6 – Load-sharing in elastic tests under single point load. ............................. 67
Table 2.7 – Initial in-plane stiffness and capacity characteristics of whole house,
and separate wall systems. .................................................................................. 85
Table 2.8 – Results summary for selected displacement cycles of destructive test. ... 86
Table 2.9 – Damage observations at different stages during the destructive test. .... 103
Table 2.10 – Structural damage status of structural sub-systems after final load
cycle of destructive test ..................................................................................... 104
Table 3.1 – Description of system properties and hysteresis model parameters...... 142
Table 3.2 – Fitted hysteresis parameters for various pinching, degrading
structural systems. ............................................................................................. 151
Table 3.3 – Fitted hysteresis parameters, using parallel system identification for
two different shear-wall systems....................................................................... 156
Table 3.4 – Fitted hysteresis parameters for L-shaped test-house and its
individual wall sub-systems. ............................................................................. 159
Table 4.1 Analysis capabilities for different modelling strategies........................... 188
Table 5.1 – CUREE ground motions: Set of 20 ordinary ground motions with
10% probability of exceedance in 50 years....................................................... 216
Table 5.2 – CUREE ground motions: Set of 6 near-fault ground motions with
2% probability of exceedance in 50 years......................................................... 217
Table 5.3 – SAC ground motions for Los Angeles with 10% probability of
exceedance in 50 years. ..................................................................................... 218

List of Tables
xiii
Table 5.4 – SAC ground motions for Los Angeles with 2% probability of
exceedance in 50 years. ..................................................................................... 219
Table 5.5 – SAC ground motions for Los Angeles with 50% probability of
exceedance in 50 years. ..................................................................................... 220
Table 5.6 – Statistics of displacement demand predictions from SDOF model of
test house, under SAC and CUREE ground motions. ....................................... 226
Table 5.7 – Median displacement demands for SDOF models with different
periods and strengths under SAC and CUREE ground motions....................... 238
Table 5.8 – 90th percentile displacement demands for SDOF models with
different periods and strengths under SAC and CUREE ground motions. ....... 239
Table 5.9 – Statistics of inter-storey displacement demand predictions from
shear-building model of example three-storey timber building, under SAC
and CUREE ground motions............................................................................. 245
Table 5.10 – Natural frequencies and associated Rayleigh damping coefficients
for hysteretic shear-wall model. ........................................................................ 262

List of Figures
xiv
List of Figures
Figure 1.1 – Framework for experimental and modelling studies (Foliente 1997a)......3
Figure 1.2 – Framework for development of improved design procedures
(Foliente, 1998) ......................................................................................................5
Figure 2.1 – Typical two-storey light-frame construction (NAHBRC, 2000). ............30
Figure 2.2 – Typical hysteresis data from tests of components in light-frame
construction. .........................................................................................................31
Figure 2.3 – Details of test house. ................................................................................38
Figure 2.4 – Photographs of test house during construction. .......................................43
Figure 2.5 – Metal straps embedded in the top plate of walls W1-W4........................44
Figure 2.6 – Photographs of load cell system. .............................................................46
Figure 2.7 – Photographs of displacement measurement system.................................48
Figure 2.8 – Ceiling level displacement gauge locations.............................................49
Figure 2.9 – Loading mechanisms used in elastic testing. ...........................................50
Figure 2.10 – Horizontal and vertical distribution of self-weight for test house. ........57
Figure 2.11 – Displaced shape and reaction forces (N) for elastic test 3. ....................58
Figure 2.12 – Displaced shape and reaction forces (N) for elastic test 5. ...................60
Figure 2.13 – Displaced shape and reaction forces (N) for elastic test 6. ...................62
Figure 2.14 – Results summary for elastic test 12. .....................................................66
Figure 2.15 – Equipment used in dynamic impact tests...............................................71
Figure 2.16 – Excitation and accelerometer locations for dynamic impact testing. ....71
Figure 2.17 – Example acceleration time histories (three repeats) and power
spectra from non-destructive dynamic impact tests. ............................................72
Figure 2.18 – Normalised sum of the power spectra from dynamic impact tests. .......74
Figure 2.19 – Photographs of load application system for destructive test..................77
Figure 2.20 – Displacement-based loading protocol used in the destructive test. .......78
Figure 2.21 – Global hysteresis response of whole house in the North-South
direction................................................................................................................81
Figure 2.22 – Backbone of global hysteresis response of whole house in the
North-South direction...........................................................................................81

List of Figures
xv
Figure 2.23 – Hysteresis response of wall systems in North-South and East-West
directions. .............................................................................................................82
Figure 2.24 – Hysteresis response of wall systems in North-South and East-West
directions, plotted on same scale..........................................................................83
Figure 2.25 – Comparison of wall W3 and W4 hysteresis responses for initial
load cycles of destructive test...............................................................................84
Figure 2.26 – Diagram showing rigid-body rotation, and racking distortion of
section of roof and ceiling diaphragm over W2, W3 and W4, for selected
displacement levels. .............................................................................................91
Figure 2.27 – Approximate hysteretic behaviour of roof and ceiling diaphragm
over walls W2, W3 and W4. ................................................................................91
Figure 2.28 – Displaced shape of house perimeter and undeformed edge at
different stages of destructive test (loading as shown in diagram at bottom). .....92
Figure 2.29 – Distribution and magnitude of X-direction reaction forces (kN) at
different stages of destructive test. .......................................................................94
Figure 2.30 – Distribution and magnitude of Y-direction reaction forces (kN) at
different stages of destructive test. .......................................................................96
Figure 2.31 – Distribution and magnitude of Z-direction reaction forces (kN) at
different stages of destructive test. .......................................................................98
Figure 2.32 – Percentage of X-direction reaction taken by each wall sub-system
during destructive test. .......................................................................................100
Figure 2.33 – Percentage of X-direction reaction taken by cross-walls during
destructive test....................................................................................................101
Figure 2.34 – Maximum uplift force in each wall during destructive test. ................102
Figure 2.35 – Photos of damaged house after destructive test. ..................................105
Figure 3.1 – Examples of piece-wise linear hysteresis models (Loh and Ho,
1990)...................................................................................................................119
Figure 3.2 – Comparison of idealised pinched hysteretic system with energy
equivalent and displacement equivalent elasto-plastic systems. ........................120
Figure 3.3 – Model by Stewart (1987). ......................................................................121
Figure 3.4 – PWL model from Sivaselvan and Reinhorn (1999)...............................121
Figure 3.5 – Model by Dolan (1989)..........................................................................123
Figure 3.6 – Model by Kasal and Xu (1997)..............................................................123
Figure 3.7 – Model by Mostaghel (1999). .................................................................124

List of Figures
xvi
Figure 3.8 – Model by Deam (2000)..........................................................................124
Figure 3.9 – Possible hysteresis shapes of the basic Bouc-Wen model for n=1
(Baber, 1980)......................................................................................................126
Figure 3.10 – Diagram showing hybrid approach to response analysis using both
mechanics-based and phenomenological models (Foliente et al., 1998b). ........130
Figure 3.11 – Hysteresis pinching and degradation effects on reliability
estimation. ..........................................................................................................134
Figure 3.12 – SDOF hysteretic structural system. .....................................................141
Figure 3.13 – Experimental and fitted hysteresis for a timber framed shear-wall
without blocking [experimental data from Karacabeyli and Ceccotti (1998)]...152
Figure 3.14 – Experimental and fitted hysteresis for a light-gauge steel-framed
house with plasterboard lining [experimental data from Gad (1997)]. ..............153
Figure 3.15 – Experimental and fitted hysteresis for a pre-cast concrete wall to
slab connection [experimental data from Robinson et al. (1999)]. ....................154
Figure 3.16 – Experimental and fitted hysteresis for a one-room Japanese-style
post and beam house – [experimental data from Watanabe et al. (1998)]. ........155
Figure 3.17 – Parallel system identification example 1 ............................................157
Figure 3.18 – Parallel system identification example 2 .............................................158
Figure 3.19 – Experimental and fitted hysteresis of test house..................................160
Figure 3.20 – Experimental and fitted hysteresis of wall W1 from test house. .........161
Figure 3.21 – Experimental and fitted hysteresis of wall W2 from test house. .........162
Figure 3.22 – Experimental and fitted hysteresis of wall W3 from test house. .........163
Figure 3.23 – Experimental and fitted hysteresis of wall W4 from test house. .........164
Figure 3.24 – Experimental and fitted hysteresis of wall W5 from test house. .........165
Figure 3.25 – Experimental and fitted hysteresis of wall W9 from test house. .........166
Figure 4.1 – Spectral densities of wind and earthquake loads, compared with
natural frequencies of common structures (Ferry-Borges and Castanheta,
1971)...................................................................................................................172
Figure 4.2 – Capacity Spectrum method (Chopra and Goel, 1999) ...........................176
Figure 4.3 – Response Spectrum method (Chopra, 1995). ........................................178
Figure 4.4 – Equivalent Linearisation method ...........................................................182
Figure 4.5 – Shear-building model.............................................................................193
Figure 4.6 – Shear-wall model ...................................................................................204
Figure 4.7 – FE model of house .................................................................................207

List of Figures
xvii
Figure 4.8 – Hybrid Response Analysis (Kasal et al., 1999) .....................................211
Figure 5.1 – Details of SDOF model used for single-storey test house sensitivity
study. ..................................................................................................................222
Figure 5.2 – Displacement demands for SDOF model (T=0.129 sec) for different
levels of assumed equivalent viscous damping, under 10/50 and 2/50
CUREE and SAC earthquakes. ..........................................................................224
Figure 5.3 – Displacement demands from SDOF model (T=0.147 sec) for
different levels of assumed equivalent viscous damping, under 10/50 and
2/50 CUREE and SAC earthquakes. ..................................................................225
Figure 5.4 – Displacement demand predictions from SDOF model (with 2%
damping) under 10/50 and 2/50 CUREE and SAC ground motions.................230
Figure 5.5 – Displacement demand predictions from SDOF model (with 5%
damping) under 10/50 and 2/50 CUREE and SAC ground motions.................231
Figure 5.6 – Displacement demand predictions from SDOF model (with 10%
damping) under 10/50 and 2/50 CUREE and SAC ground motions.................232
Figure 5.7 – Example hysteretic responses of SDOF model under selected
ground motions...................................................................................................233
Figure 5.8 – Comparison of median displacement demands for different assumed
equivalent viscous damping levels.....................................................................234
Figure 5.9 – Comparison of 90th percentile displacement demands for different
assumed equivalent viscous damping levels. .....................................................236
Figure 5.10 – Comparison of median displacement demands for SAC and
CUREE ground motions.....................................................................................241
Figure 5.11 – Details of shear-building model for example three-storey building. ...245
Figure 5.12 – Inter-storey displacement demand predictions for example three-
storey building under 10/50 and 2/50 CUREE and SAC earthquakes. ..............246
Figure 5.13 – Hysteretic responses of example three-storey building under
nr94rrs ground motion........................................................................................247
Figure 5.14 – Comparison of maximum drift ratio predictions for SDOF and
shear-building models, for example three-storey building under 10/50 and
2/50 SAC and CUREE ground motions.............................................................248
Figure 5.15 – Comparison of response statistics calculated using Monte-Carlo
simulation, and Equivalent Linearisation under stationary white noise
excitation (max = 0.5g) for SDOF model of test house. ...................................252

List of Figures
xviii
Figure 5.16 – Example of hysteretic response of SDOF model under stationary
white noise excitation (max = 0.5g). ..................................................................254
Figure 5.17 – Comparison of peak and standard deviation of SDOF model
responses under first 20 seconds of CUREE ground motions. ..........................254
Figure 5.18 – Comparison of response statistics calculated using Monte-Carlo
Simulation, and Equivalent Linearisation under stationary white noise
excitation (max = 0.5g) for example three-storey building................................256
Figure 5.19 – Example of hysteretic response of shear-building model under
stationary white noise excitation (max = 0.5g). .................................................258
Figure 5.20 – Details of shear-wall model for single-storey test house. ....................263
Figure 5.21 – Comparison of model prediction and experimental results for
distribution of in-plane reaction forces in walls W1-W4 under static-cyclic
loading................................................................................................................266
Figure 5.22 – Comparison between displacement demand prediction from shear-
wall model and SDOF model under 10/50 and 2/50 CUREE and SAC
ground motions...................................................................................................268
Figure 5.23 – Comparison of averaged response from walls W1 to W4 in shear-
wall model with response from SDOF model, for selected ground motions. ....269
Figure 5.24 – Comparison between displacement demand predictions, averaged
for walls W1 to W4, under bi-directional and uni-directional SAC ground
motions. ..............................................................................................................271
Figure 5.25 – Displacement demand for individual walls, under bi-directional
SAC ground motions..........................................................................................274
Figure 5.26 – Predicted in-plane hysteresis responses of individual walls under
bi-directional la32 ground motion......................................................................275
Figure 5.27 – Distribution of load to individual walls under la32 ground motion. ...276
Figure 5.28 – Median of displacement demands from shear-wall model, for
individual walls, under bi-directional SAC ground motions..............................277
Figure 5.29 – 90th percentile of displacement demands from shear-wall model,
for individual walls, under bi-directional SAC ground motions........................277

List of Figures
xix

Notation
xx
Notation
The following variables and symbols are used throughout thesis.
A = parameter that regulates ultimate hysteretic restoring force
1a = Rayleigh damping coefficient
2a = Rayleigh damping coefficient
B = matrix of the expected values of the products of the forcing
functions and the response vectors
C = the damping matrix of a MDOF system
Ci = expectations required to compute 3eC
3eC = linearisation coefficient of 2y
c = viscous damping coefficient
ci = viscous damping coefficient of ith mass
E(•) = expected value
error = error between experimentally and model determined hysteresis
used in system identification
erf(•) = error function
erfc(•) = complementary error function
exp(•) = exponential function
uE = sub-matrix of covariance matrix, S
uE� = sub-matrix of covariance matrix, S
zE = sub-matrix of covariance matrix, S
uzE = sub-matrix of covariance matrix, S
uzE�
= sub-matrix of covariance matrix, S
uuE� = sub-matrix of covariance matrix, S
Eexp = experimentally determined energy dissipation in system
identification error function

Notation
xxi
Emod = model calculated energy dissipation in system identification
error function
F = fundamental frequency of vibration (Hz)
f(t) = mass-normalised forcing function
F(t) = forcing function
Fu = maximum load
f = forcing function vector
F = a general vector of time-varying actions
Fexp = experimentally determined restoring force in system
identification error function
Fmod = hysteresis model calculated restoring force in system
identification error function
G = matrix that contains the coefficients of Y
g = acceleration due to gravity (9.8 m/s2)
Hα = matrix that contains the hysteretic elements
ihα = hysteretic coefficient of ith element
h(z) = pinching function
ˆ{ }I = influence vector
I = identity matrix
IGL(•) = generalised Gauss-Laguerre quadrature
Isn = standard sin integral
Isum = standard summation
k = stiffness
Kα = linear part of the stiffness matrix
3eK = linearisation coefficient of 3y
Ki = expectations required to compute 3eK
ikα = linear spring coefficient of ith element
m = mass
mi = mass of ith element
M = the mass matrix of a MDOF system
n = parameter which controls the 'sharpness' of yield

Notation
xxii
q = pinching parameter that controls the percentage of ultimate
restoring force zu where pinching occurs
Qi = total restoring force of the ith mass
p = pinching parameter that controls the initial drop in slope
R = a general differential operator
[ ( ), ( ); ]R u t z t t = non-damping restoring force of non-linear system
r = total number of lumped masses in MDOF model
S = zero-mean time lag covariance matrix
S� = time derivative of S
0S = power spectral density of white noise excitation (m2/s)
sgn(•) = signum function
T = fundamental period of vibration (seconds)
t, to, tf = time
u = displacement
u� = velocity
u�� = acceleration
iu = relative displacement of ith mass
iu� = relative velocity of ith mass
iu�� = relative acceleration of ith mass
U = a general vector of system response
We = weighting factor for energy error in system identification error
function
Wf = weighting factor for force error in system identification error
function
{ }X = vector of global displacements
{ }X� = vector of global velocities
{ }X�� = vector of global accelerations
{ }Y = vector of global response
{ }Y� = time derivative of{ }Y
ix = displacement of ith mass with respect to ground

Notation
xxiii
ix� = velocity of ith mass with respect to ground
ix�� = acceleration of ith mass with respect to ground
gx�� = ground acceleration
Aix�� = absolute acceleration
1,iy = iu – ith displacement element of vector {Y}
2,iy = iu� - ith velocity element of vector {Y}
3,iy = iz - ith hysteretic displacement element of vector {Y}
1,iy� = time derivative of 1,iy
2,iy� = time derivative of 2,iy
3,iy� = time derivative of 3,iy
{Z} = vector of the hysteretic components of the displacements
z = hysteretic component of the displacement
z� = time derivative of z
zi = hysteretic displacement of ith mass
iz� = time derivative of zi
zu = ultimate value of hysteretic displacement
α = ratio of linear to non-linear contribution to restoring force
β = hysteresis shape parameter
γ = hysteresis shape parameter
( )Γ • = Gamma function
i∆ = constants for expected values needed by 3eC and 3eK
ijδ = Kronecker delta
νδ = strength degradation parameter
ηδ = stiffness degradation parameter
δψ = pinching parameter that controls the rate of change of ζ 2
ε = calculated energy dissipation
1ζ = controls the severity of pinching
2ζ = controls the rate of pinching
ζ s = parameter that indicates degree of pinching

Notation
xxiv
η = stiffness degradation
oθ = integration limit of snI
λ = pinching parameter that controls the rate of change of ζ 2 as ζ1
changes
εµ = mean ofε
1ξµ = mean of 1ξ
2ξµ = mean of 2ξ
ηµ = mean ofη
νµ = mean ofν
1* 2*,µ µ = linearisation coefficient constants
ν = strength degradation
ξ ,ξo = viscous damping ratio
23ρ = correlation coefficient of 2y ( or u� ) and 3y (or z)
1* 2*,σ σ = linearisation coefficient constants
1,uσ σ = standard deviation of u ( or 1y )
2,uσ σ�
= standard deviation of u� ( or 2y )
3,zσ σ = standard deviation of z ( or 3y )
ψ o = pinching parameter that contributes to the amount of pinching
ω 0 = natural frequency of linear system = k m/

Abbreviations
xxv
Abbreviations
The following abbreviations are used throughout this thesis.
CSIRO = Commonwealth Scientific and Industrial Research Organisation
CUREE = Consortium of Universities for Research in Earthquake Engineering
DE = distributed element
DOF = degree-of-freedom
EQL = Equivalent Linearisation
FE = Finite Element
GRG = Generalised Reduced Gradient
MCS = Monte-Carlo simulation
MDOF = multi-degree-of-freedom
NAHB = National Association of Home Builders
ODE = ordinary differential equation
PWL = piece-wise linear
PWNL = piece-wise non-linear
RVA = Random Vibration Analysis
SDOF = single-degree-of-freedom
US = United States
USA = United States of America

Preface
xxvi
Preface
Three refereed conference papers have been produced throughout the course of this
research and are reproduced in the Appendix. One journal paper is currently under
review. These publications are listed below.
Chapter 3 has in part been presented in the following:
• Paevere, P. J. and G. C. Foliente. 1999. "Hysteretic Pinching and Degradation
Effects on Dynamic Response and Reliability." Pp. 771-79 in Proceedings of
the Eighth International Conference on the Application of Statistics and
Probability. Sydney, 12-15 December. Ed. R. E. Melchers and M. G. Stewart.
A.A. Balkema, Rotterdam.
Chapter 4 has in part been presented in the following:
• Paevere, P. J., G. C. Foliente, and N. H. Haritos. 1998. "On Finding an
Optimum MDOF Inelastic System Model for Dynamic Reliability Analysis."
Pp. 215-222 in Proceedings of the Australasian Conference on Structural
Optimisation. Sydney, Australia, February 11-13. Ed. G. P. Steven, O. M.
Querin, H. Guan, and Xie Y. M. Oxbridge Press, Victoria, Australia.
• Paevere, P. J., N. H. Haritos, and G. C. Foliente. 1998. "A Hysteretic MDOF
Model for Dynamic Analysis of Offshore Towers." Pp. 513-17 in Proceedings
of the Eighth International Offshore and Polar Engineering Conference.
Montreal, Canada, May 24-29.
Currently under review:
• Paevere, P. J., G. C. Foliente, and B. Kasal. "Load Distribution and Load-
Sharing Mechanisms in a One-story Woodframe Building.", Paper submitted
for publication in the Journal of Structural Engineering, ASCE. First
Submitted, September 2001.

Preface
xxvii

Chapter 1 – Introduction and Overview
1
CHAPTER 1
Introduction and Overview
1.1 Background
Many people in the world live and work in light-frame buildings. They rely on these
structures for protection against natural disasters such as tropical cyclones and
earthquakes, and have an inherent expectation of their safety. Although light-frame
buildings have anecdotally performed well in natural disasters, many have also
suffered extensive damage, causing financial ruin and social upheaval. In the 1994
Northridge Earthquake, for example, twenty four deaths, and financial losses of more
than US$20 billion occurred as a result of damage in light-frame construction. This
represented most of the fatalities, and more than half of the total damage bill (Office
of Emergency Services, 1995; Kircher et al., 1997).
Until quite recently, modern technology has played only a small role in the design and
construction of light-frame buildings, particularly those made from timber. The
construction techniques have been developed over long periods of time, based mainly
on tradition and experience. In other, relatively modern forms of construction, such
as pre-stressed concrete, technology has been applied extensively, and forms the basis
of the design philosophy and methodology.
Inevitably, societal expectations will dictate that the design and evaluation of light-
frame structures also incorporates state-of-the-art technology, to ensure adequate and
consistent structural performance in natural disasters, and so that structural
performance can be targeted to suit differing user needs and expectations. Such
technology is a necessary prerequisite for a ‘performance-based’ approach to
development of new building products and systems, and will lead to enhanced
innovation and trade in the light-frame construction industry.

Chapter 1 – Introduction and Overview
2
Development of improved performance prediction technologies requires a detailed
understanding of the structural behaviour of light-frame buildings, as well as the
environmental loadings to which they are subjected during their lifetime. Structural
testing in the laboratory, field measurements and disaster surveys combined with
analytical modelling are essential in obtaining this understanding.
1.2 A Framework for Combined Experimental and
Analytical Analysis of Light-Frame Structures
A light-frame building is an assemblage of several components or sub-assemblies
with repetitive members such as walls, floors and roof systems connected by inter-
component connections such as bolts, metal straps or proprietary connectors forming
a three-dimensional highly indeterminate structural system. Because very little is
known about how the load is shared and distributed in such a complex structural
system, gross simplifying assumptions must be made in structural evaluation and
design. This can result in either over- or under-strength elements being present in a
structure, resulting in either over-conservative (and therefore uneconomical) or less
safe structures.
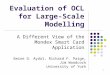
Figure 1.1 shows a framework for analytical and experimental studies of structural
performance of light-frame buildings. Most analytical and experimental work found in
the literature focuses on understanding the response behaviour and mechanisms at the
sub-system level, such as shear-walls – Level 1 in Figure 1.1 (Foliente and Zacher
1994). Recommendations arising from studies at this level typically ignore system
effects, and the fact that the actual forces that the sub-system experiences, depends
primarily on the geometric and structural characteristics of the whole building – Level
2 in Figure 1.1. For example, Level 1 tests do not always take into account the effect
of boundary conditions on the results. Boughton’s (1988) summary of tests on full-
scale houses (Level 2) and isolated wall components (Level 1) demonstrated that
boundary conditions in the wall test ‘can influence the stiffness, ultimate load and
failure characteristics of components under test’.

Chapter 1 – Introduction and Overview
3
Whole building
Subassemblies(e.g., walls, floors)
Elements(e.g., steel, timber, panel
sheathing)
Inter-componentconnections
Simple joints andfasteners
Level 1 Relations
Level 2 Relations
Figure 1.1 – Framework for experimental and modelling studies (Foliente 1997a).
He also concluded that the commonly accepted assumptions regarding load-sharing
and ductility were invalid, and in some cases un-conservative, but that structural
redundancies which were usually ignored, unintentionally compensated for this.
Full-scale whole house testing is needed to properly understand the system behaviour
and to prove the validity of isolated component test results and their interpretations
(Boughton 1988; Foliente and Zacher 1994).
Analytical modelling strategies which are consistent with the framework in Figure 1.1
are also needed to extend the usefulness of the experimental data, and predict
structural behaviour of the whole building, its subassemblies and element-level
components under real environmental loadings such as tropical cyclones and
earthquakes. Ideally, the analytical models should incorporate the physical
relationships between individual element and whole-building response and vice-versa.
To achieve this, a ‘hybrid’ modelling approach, which uses a range of linked
analytical models, is preferable to a single ‘monolithic’ model.
A detailed ‘monolithic’ modelling approach may be suitable for analysing whole-
building and corresponding component response under simple deterministic loads, but
may not be appropriate when complex random loads such earthquakes need to be
considered. Building responses under these types of loads are inherently non-linear
and random in nature, and are best quantified using Monte-Carlo simulation (MCS),

Chapter 1 – Introduction and Overview
4
or similar techniques. These methods are extremely computationally intensive and are
not suitable for ‘monolithic’ structural models with a large number of degrees-of-
freedom (DOF).
Under a ‘hybrid’ strategy, the worst-case output from a simple (i.e. few DOF) global
response prediction model, based on many repeated analyses, can be used as the input
to a more detailed model which can then determine individual element responses.
Conversely, the output from a detailed element-level model, can be used to determine
the properties of a simple global model (in a way analogous to physical testing),
which can then be used to derive global response statistics, based on many repeated
analyses.
The hybrid modelling approach enables response predictions to be made which
include system effects, linkages between element-level and global response, and
consideration of the variability in environmental loading. The link between these
models is critical, so that they can be used in tandem to span across analysis domains
(i.e. global to local, simple to complex, deterministic to probabilistic). This linkage is
best facilitated using system identification, where the model parameters for the simple
model are determined in a systematic fashion, from the output of the complex model,
and vice versa.
Because analytical models are generally much simpler than the real-world systems
they represent, experimental testing is, in turn, needed in the development, refinement
and validation of the analytical models. Different types of models require different
types and densities of response data for the purposes of validation. Unfortunately,
there have been relatively few experimental studies on whole-building response which
have provided the right kind and/or amount of data needed to fully develop and
validate models which cater for both element-level and global response. Some
advances towards this end have been made in studies conducted by Phillips et al.
(1993), Kasal et al. (1994), Gad (1997) and Fischer et al. (2001). These are reviewed
in Chapters 2 and 4.

Chapter 1 – Introduction and Overview
5
1.3 A Framework for Improving Design Procedures
Analytical and experimental studies of the structural performance of light-frame
buildings are crucial in the development of design procedures. Figure 1.2 shows an
ideal way of developing improved design methods, both for engineered construction
and conventional, non-engineered (or deemed-to-comply) construction. Improvements
are made based not only on calibration of design methods to field observations and
historical performance (e.g., Crandell and McKee 2000), but also on improved
building performance models and state-of-the-art analysis techniques (right-most
block in Figure 1.2).
“Conventional” Construction Engineered Construction Analysis Based on “FirstPrinciples”
• Prescriptive or deemed tocomply provisions
• For simple building types andshapes
• Simplified guidelines
• Span tables and charts
• Diagrams and figures of requiredconstruction details
• Code-specified loads andmaterial properties
• Engineering calculations(equations, tables and diagrams)
• Element-by-element design
• Historical performance
• Loads: realistic representation
• Structure type: element/joint,subsystem, whole building
• Analytical models: lumped mass,frame or component, FiniteElement
• Analysis: static, dynamic,reliability
C U R R E N T A P P R O A C H I D E A L A P P R O A C H
Figure 1.2 – Framework for development of improved design procedures (Foliente, 1998).
Currently, light-frame timber buildings in the USA may be non-engineered
(commonly called ‘conventional’ construction), fully engineered or mixed (i.e.,
combined conventional and engineered construction) (Cobeen 1997; Foliente 1998).
For the most part, conventional construction provisions have little or no direct
relations with engineered design provisions. Combined conventional and engineered
construction, which is increasingly practiced in California and other US states, results
in significant variations in design practice even in the same locality (Cobeen 1997).
In Australia (which has a similar style of light-frame timber construction to the USA),
deemed-to-comply provisions for light-frame timber construction are given in a set of
span tables and supporting specifications for various members of the house. Used

Chapter 1 – Introduction and Overview
6
widely by builders throughout Australia, including regions with high winds, these
provisions have been developed based on accepted engineering design standards
(MacKenzie 2000) – the centre and left blocks in the diagram in Figure 1.2 show this
development process. This is a rational approach, and has also been applied (although
to a lesser extent, compared to the Australian practice) in the development of the
Wood Frame Construction Manual for one- and two-family dwellings in high wind
areas in the south-eastern USA (AFPA 1995).
The ‘ideal approach’ in Figure 1.2 provides for faster and cheaper development of
innovative building products by minimising testing requirements and field trials, and
also provides the opportunity to increase trade between regions with different building
practices, by demonstrating equivalent performance of regionally differing
construction systems. This approach is consistent with the shift towards technology-
intensive ‘performance-based’ design procedures, which are gaining wide acceptance.
1.4 Performance-Based Design and Evaluation
During recent years, there has been a shift towards ‘performance-based’ design and
assessment of engineering structures such as buildings and bridges. Currently, most
of the design and evaluation of these structures is based on prescriptive engineering
design methods (i.e. centre block of Figure 1.2), which are contained in building
codes and standards. The basic idea behind the performance approach is that a
structure is assessed in terms of compliance with specific performance criteria, rather
than compliance with a set of generalised prescriptive design rules. The advantage of
the performance-based approach is that the designer is freed from the constraints of
overly-generalised prescriptive rules, allowing for more innovative design solutions.
Foliente (2000), proposes that ‘the performance approach is, in essence, the practice
of thinking and working in terms of ends rather than means’.
One of the key drivers behind the move towards performance-based design of
buildings, is the increasingly diverse needs of building owners, users and society. The
‘one size fits all’ approach, which underpins most prescriptive methods, is not
appropriate in a modern and increasingly sophisticated world. In the context of the

Chapter 1 – Introduction and Overview
7
design and evaluation light-frame structures, a more flexible performance-based
approach seems ideal, since the majority of light-frame structures are residential
dwellings. The residential sector of the construction industry has by far the largest
diversity of owner/occupier expectations and requirements, and would therefore
benefit most through its implementation into practice. The performance approach is
consistent with the ‘ideal approach’ shown in the framework for development of
improved design procedures in Figure 1.2. However, the critical underlying
assumption behind the performance-based philosophy, is that performance can be
predicted with consistency and accuracy – this is a key challenge which needs to be
addressed before performance-based design can be truly beneficial.
Another challenge in implementing true performance-based design in practice, is the
development of probabilistic analysis techniques and performance criteria.
Environmental loadings on structures are random in nature, and hence they are best
described in probabilistic terms. Structural response to these loads is also random,
and as such, any performance criteria relating to the response levels, are also best
described probabilistically.
State-of-the-art technologies, including whole-structure testing and modelling, and
probabilistic analysis techniques must be utilised to understand the behaviour of light-
frame structures, if accurate performance prediction under natural disaster loading is
to be achieved. The development of experimentally validated analytical models of
light-frame structures is essential in working towards this goal.
1.5 Overview of Common Design Procedures used
for Lateral Load Distribution
Design of light-frame structures to resist wind and earthquake loads involves the
design of the structure’s lateral force resisting system. This usually consists of a
system of shear walls and diaphragms which are connected together to transfer the
loads to the building’s foundations. The design procedure can be summarised as
follows (NAHBRC, 2000):

Chapter 1 – Introduction and Overview
8
1) Determine building geometry and layout of walls, floors and roof.
2) Calculate an equivalent wind or earthquake lateral design load.
3) Distribute the lateral design load to the shear-walls via the floor and roof
systems.
4) Determine the shear-wall and diaphragm requirements to resist the calculated
proportion of the applied load (from step 3).
5) Determine, hold-down and inter-component connection, and special detailing
requirements.
Because light-frame structures are highly indeterminate three-dimensional systems,
crude simplifying assumptions are usually made in determining the distribution of the
applied lateral loads (i.e. step 3 above). This is problematic, because the design of
individual sub-systems and components are highly dependent on the accuracy and
reliability of the lateral force distribution method used. This step in the analysis and
design process is critical, because if one chooses an inappropriate method of
distributing these loads, any subsequent effort spent on detailed engineering design of
individual components may be wasted. Thus it is possible to have an ‘engineered’
house that is potentially less safe than the one that has not been ‘engineered’, if the
load distribution is not estimated correctly.
The three most commonly used lateral force distribution methods are: 1) Tributary
Area; 2) Total Shear; and 3) Relative Stiffness. These are discussed in detail in the
Residential Structural Design Guide: 2000 Edition (NAHBRC, 2000) and are
described briefly in the following.
Tributary Area Method
The Tributary Area method is the most commonly used lateral force distribution
method, and is based on an assumption that the horizontal diaphragms are flexible
compared to the walls. Under this assumption, the lateral forces are distributed in
proportion to the tributary area or mass associated with the shear walls, rather than
their stiffness. The method is analogous to a series of flexible beams on rigid
supports, with varying line loads. It has been shown that this approach can lead to
inaccurate results for certain plan configurations (Kasal and Leichti 1992) and can

Chapter 1 – Introduction and Overview
9
lead to both conservative and non-conservative results. This model does not consider
the effect of stiffness on load distribution and is based on assumptions, which are
rarely met in practice.
Total Shear Method
This method is the second most popular, and requires minimal calculations. The
method dictates that the total shear resistance of all the walls in a given storey must
add up to the total applied shear resulting from the design load. The distribution of the
shear resistance is left up to the judgement of the designer. The distribution should be
determined such that a desirable response (such as minimum torsion under earthquake
loading) will result. The reliability of this method depends totally on the judgement
of the designer, and could result in poor performance if the load distribution is not
estimated with reasonable accuracy.
Relative Stiffness Method
This approach is the converse of the tributary area approach. It is based on an
assumption that the horizontal diaphragms are rigid compared to the walls. Under this
assumption, the lateral forces are distributed to the walls in proportion to their
stiffness rather than their associated tributary area. If the rotation of the building is
considered, then the method is analogous to a rigid beam on elastic springs, and some
re-distribution of the applied load, due to the torsional response can be
accommodated. This method is conceptually more precise than the other two, and is
the only method which considers torsion and the associated re-distribution of the
loads within the system, but still represents a very rough approximation to the actual
structural behaviour.
Comments
These three methods are completely different in their underlying philosophy, and as
such, can produce quite different results for identical buildings under identical loads.
If performance-based methods are to be successfully applied in the design and
assessment of light-frame structures, more accurate and reliable lateral force

Chapter 1 – Introduction and Overview
10
distribution methods need to be developed, based on a detailed understanding of the
structural behaviour. This understanding is best facilitated through the development
of experimentally validated analytical models of light-frame structures.
1.6 Summary of Research Needs and Opportunities
The regulatory shift towards technology-intensive performance-based design
procedures, and the differing needs and expectations of building owners, users and
society, will inevitably drive technological advances in the design and evaluation of
light-frame structures. Development of reasonably accurate performance prediction
technologies requires a detailed understanding of the structural behaviour of light-
frame buildings, which can only be achieved through combined structural testing in
the laboratory and analytical modelling in both the deterministic and probabilistic
domains.
Key research areas which are critical to understanding the behaviour of light-frame
systems and the development of better performance prediction capabilities include:
• Development of a range of analytical models for light-frame structures, which
consider system effects, the load paths within the structure, the links between
component and global responses and the inherent variability in environmental
loads.
• Experimental validation of analytical models through whole-building tests and
tests on components and sub-assemblies. Distribution of applied lateral load
within full-scale structures needs to be measured, so that analytical models
which are capable of predicting the load distribution can be validated.
• Linking of analytical models using system identification, so that local to
global, simple to complex, and deterministic to probabilistic analysis domains
can be crossed.

Chapter 1 – Introduction and Overview
11
1.7 Project Objectives and Scope
1.7.1 Overall Objectives of Research Program
The long-term vision for this project is to make light-frame structures more affordable
and safer for people than they currently are through appropriate efficiency in the
structural system. It has been highlighted that a path towards this goal is the
development of tools and procedures that can be used to establish the structural
performance with reasonable accuracy, and the performance criteria for light-frame
buildings, and to optimise their construction in some manner, (i.e. find the most
economical design for a given performance level). Following this path, the objective
of this project is to develop experimentally validated numerical models of light-frame
structures, which are capable of accurately predicting structural performance, and can
be used to improve current design procedures.
It is anticipated that the project findings will contribute to the basic understanding of
structural behaviour of light-frame buildings under lateral loads, and to the
development of safer and more affordable housing in the future.
To meet the project objectives, a research plan has been formulated in four phases,
with each phase having its own specific aims.
1) Full-Scale Testing
In the first phase of the project, the aim is to conduct tests on a full-scale L-shaped
timber-frame house, and to measure the load distribution and deflected shape in fine
detail. The experiments are designed and conducted for the purposes of validating a
range of numerical models (see Phase 3), and also to examine the load-sharing and
system effects under a range of elastic and inelastic response conditions.
2) Component and sub-assembly testing
The aim in this phase of the project is to determine the characteristics of the
subassemblies, connections and components used in the test house, to facilitate full
validation of a finite-element (FE) model of the house (See Phase 3), and to compare

Chapter 1 – Introduction and Overview
12
the behaviour of subassemblies when isolated to when they are part of the full
structure.
3) Structural Modelling and Validation
In this phase of the project, the aim is to develop a range of numerical models and
analysis techniques, which can be used to predict the performance of light-frame
structures under seismic loading. The models will be validated against the
experimentally determined responses from Phase 1. Three types of models will be
developed to cover a range of analysis capabilities
• non-linear FE model
• hysteretic shear-wall model
• hysteretic single-degree-of-freedom (SDOF) and shear-building models
System identification techniques will also be developed to systematically determine
model parameters from experimental data, and to facilitate linking of the models, so
that different analysis domains can be crossed.
4) Performance Analysis
The aim in this phase is to examine the performance of typical light-frame structures,
including the house tested in Phase 1, under earthquake loading using deterministic
and stochastic response analyses.
1.7.2 Specific Objectives and Scope of the Work Presented
The work presented in this thesis does not cover every aspect of the overall research
program described in section 1.7.1. The development and validation of the FE model
of the house (part of Phase 3), and the testing of the individual components and sub-
assemblies (all of Phase 2) are the subjects of separate research projects, and are not
presented here. It is important that they are included in the overview and description
of the testing program to give the reader an appreciation of the wider scope of the
project goals.
The specific aims of this PhD project are: 1) to develop simple, experimentally
validated numerical models of light-frame structures, which can be used to predict

Chapter 1 – Introduction and Overview
13
their performance under seismic loading; and 2) collect experimental data suitable for
validation of more complex non-linear finite-element models of light-frame
structures.
The scope of the current work includes:
• full-scale testing of the house (Phase 1)
• development of hysteretic SDOF, shear-building and shear-wall models with
stochastic response analysis capability (Phase 3)
• development of system identification techniques to facilitate hybrid modelling,
and determination of model parameters from experimental data (Phase 3); and
• seismic performance prediction using hysteretic SDOF, shear-building and
shear-wall models (Phase 4)
1.8 The CUREE Caltech Woodframe Project
In response to the extensive damage caused to light-frame timber construction in the
1994 Northridge Earthquake, an extensive research project was initiated in the USA to
improve the seismic resistance of light-frame timber buildings. The project is being
conducted by the Consortium of Universities for Research in Earthquake Engineering
(CUREE), and is referred to as the CUREE-Caltech Woodframe project. An overview
can be found in Hall (2000). The scope of the CUREE project is broad, and includes
field investigations, full-scale house testing, component testing, analytical modelling
and development of design procedures. This project was still ongoing at the time of
publication of this thesis. Because of the currency of the project, and its direct
relevance to the work presented here, it warrants special mention so as to outline the
key similarities and differences.
The overall goals of the CUREE project, and the goals outlined for this project in
section 1.7, are quite similar, in that both projects aim to improve the performance of
light-frame structures in the long term. The work presented here is focussed only on
laboratory testing and analytical modelling at present.

Chapter 1 – Introduction and Overview
14
The full-scale testing conducted so far in the CUREE project involved shake-table
testing of a two-storey house. The main objective in this test was to determine the
dynamic characteristics and the seismic performance of the test structure under
various levels of seismic shaking and for different structural configurations. Full
details of the CUREE shake table tests can be found in Fischer et al. (2001). The full-
scale testing in the work for this thesis involves static and static-cyclic testing of a
non-symmetrical single-storey house. The main objective in the testing presented
here was to determine the complete distribution of laterally applied load throughout
the structure in detail (not included in the CUREE test) and to obtain data for the
validation of numerical models, which can predict the load-path, including a FE
model.
The analytical modelling tasks in the CUREE project also have similar goals to those
stated for this project. Modelling of system behaviour is emphasised, based on data
from both system and component tests. The emphasis in the analytical modelling
work presented here in this thesis is also on system behaviour, but perhaps leans more
towards modelling in the probabilistic domain, hybrid strategies and system
identification.
The issues that need to be addressed before reliable performance prediction tools for
light-frame structures become a reality, are numerous and diverse. One of the major
issues is that these structures are complex in nature and come in a huge variety of
configurations. Even a large initiative like the CUREE project can only begin to
address these issues. The experimental and analytical work presented in this thesis
will complement and extend the knowledge gained from the ongoing work of the
CUREE-Caltech Woodframe project, and vice-versa.
1.9 Thesis Overview
1.9.1 Structure of Literature Review
Literature relevant to the project background and the overall project objectives is
reviewed in Chapter 1. Although each of the individual topics that are covered in this

Chapter 1 – Introduction and Overview
15
thesis are inter-related, they are generally treated as separate topics in the literature,
and hence, are reviewed separately at the beginning of the appropriate chapter.
1.9.2 Structure of Thesis
In Chapter 1, background information, and justification for the research project is
presented. Some key research needs are identified, and overall and specific project
aims are identified. Literature relevant to the overall project objectives is reviewed.
In Chapter 2, the general behaviour of light-frame systems, and full-scale testing of
light-frame structures are reviewed. The experiments conducted on a full-scale L-
shaped house are outlined in detail, including a description of the loading and
response measurement systems. The experimental results are presented and
discussed, and some conclusions based purely on the experiments are drawn.
In Chapter 3, modelling of hysteretic behaviour, and determination of hysteresis
model parameters using system identification are reviewed in the context of light-
frame structures. A differential model of hysteresis appropriate for use in the
structural analysis of light-frame systems is presented. The parameters of the
differential hysteresis model are determined from the experimental results using non-
linear gradient-based system identification. A ‘parallel’ system identification
technique is demonstrated, where a single set of hysteresis parameters is fitted to
multiple data sets simultaneously.
In Chapter 4, seismic response analysis techniques are reviewed. Hysteretic SDOF,
shear-building, and shear-wall models, for the seismic analysis of light-frame
structures are formulated using differential hysteresis elements. An Equivalent
Linearisation (EQL) scheme formulated for determining response statistics of a SDOF
model under random loads, by Foliente et al. (1996), is extended to a multi-degree-of-
freedom (MDOF) shear-building model. FE, and hybrid modelling strategies, for
seismic response analysis are outlined.

Chapter 1 – Introduction and Overview
16
In Chapter 5, the results of the analytical modelling of the seismic response of the L-
shaped test house and an example three-storey light-frame building are presented.
Two different suites of ground motions which are used in the analyses are discussed
and summarised, then response and sensitivity studies of single- and three-storey
light-frame structures are presented. EQL is used to determine the response statistics
of the single- and three-storey light-frame buildings under white noise excitations, and
the results are compared with those from MCS. Comparisons are made between
predictions from different modelling techniques, and finally the seismic demands on
individual walls of the test house are predicted in terms of response statistics.
Chapter 6 summarises the key conclusions from the research and provides a summary
of the work presented in the thesis.
Appendix A contains an extended summary of the full-scale elastic testing results.
Appendix B contains an extended summary of the destructive testing results.
Appendix C contains a summary of the Reduced-Gradient system identification
algorithm.
Appendix D contains the equations for the linearisation coefficients, which are used in
the statistical equivalent linearisation schemes for the shear-building and SDOF
models.
Appendix E contains the peer-reviewed conference papers produced throughout the
course of the research.

Chapter 2 – Experiment Description and Results
17
CHAPTER 2
Experiment Description and Results
2.1 Introduction
Structural testing in the laboratory is essential for understanding the response of
structural components and systems under different loading conditions. Physical
experiments allow detailed monitoring of the structural behaviour and response under
controlled conditions, and provide information that can be used directly to improve
new and existing products and design tools and procedures. Importantly, laboratory
testing is also crucial in the development, calibration and validation of analytical
models of structures.
This chapter addresses the experimental work conducted in this project. It begins
with a discussion and review on testing of light-frame structures and then outlines and
describes the physical experiments conducted on a full-scale North American style
one-storey L-shaped timber-frame house. A description of the loading and response
measurement systems used in the experiments is given, and the results of the
experiments are summarised and presented. Some conclusions are drawn based purely
on the results of the experiments.
The experimental program for the entire project is broken into five stages:
1. Elastic testing – presented in section 2.4
2. Dynamic impact vibration testing – presented in section 2.5
3. Destructive testing – presented in section 2.6
4. Isolated wall testing – not covered in this thesis
5. Component testing – not covered in this thesis

Chapter 2 – Experiment Description and Results
18
In the ‘elastic’ tests, the distribution of the reaction forces underneath the walls of the
house, and a variety of displaced shapes, under very small lateral loads were
measured. Inelastic behaviour in these tests, and any associated damage to the house,
was minimised by limiting displacements to around 1mm. In the vibration tests, the
fundamental racking mode frequencies of the structure were determined using impact
vibration measurements. In the destructive testing, the distribution of the reaction
forces underneath the walls, and the displaced shape of the house, were measured
under static-cyclic lateral loading up to +/- 120mm.
A major objective of the experiments described here was to collect data for calibration
and validation of a suite of numerical models of the structure, comprising:
• a detailed FE model
• a hysteretic shear-wall model
• lumped mass models (SDOF and shear-building)
Each of these models requires a different density of response data for the purposes of
validation. Hence, the experiment and the instrumentation were designed such that
both global and also very localised response data could be gathered or derived. In the
elastic and destructive tests, 250 separate channels of load and displacement data were
measured providing a detailed picture of the distribution of forces throughout the
structure and the deflected shape of the house during the tests.
The other major objective of the whole-structure testing, was to completely measure
the displaced shape and distribution of the applied loads throughout the structure
under elastic and inelastic response conditions, to examine the amount of load-
sharing, and the load-redistribution mechanisms.
Full details of the test house are given in section 2.3.3

Chapter 2 – Experiment Description and Results
19
2.2 Overview of Light-Frame Testing
2.2.1 Introduction
Studies of structural damage in light-frame structures after natural disasters have been
a primary means of validating and improving design methods. This has proven to be a
very slow and inconsistent process for optimising safety, and generally lacks the
quantitative aspect needed to improve engineering tools. Furthermore, data collected
from these efforts do not provide information on processes leading to failure.
Structural testing in the laboratory or the field is useful because it allows close
monitoring of the structural behaviour and response under controlled loading
conditions, and provides information that can be used directly to improve new and
existing products and design tools and procedures.
Analytical models for analysis of light-frame structural systems are also needed to
extend the usefulness of the experimental data, predict structural behaviour under
specified natural hazard loads and conduct parametric response studies. These models
are useful in research and can assist in the development and/or calibration of code
requirements and design procedures. As highlighted in Chapter 1, models are
generally much simpler than the real-world systems they represent, and experimental
testing is needed for their development, refinement and validation. The integration of
laboratory testing and analytical modelling studies of light-frame buildings is crucial
to provide the necessary technical understanding for the development of rational
design tools and procedures which will ensure the levels of safety and economy which
are demanded by building occupants and society.
Although the inter-dependence of testing and modelling is vitally important, it is
convenient to review them as separate topics, since they are mostly treated as such in
the literature. In the following sections, the general behaviour of light-frame systems,
and full-scale experimentation of light-frame construction is reviewed. Analytical
modelling of the behaviour of light-frame construction is reviewed separately in
Chapters 3 and 4.

Chapter 2 – Experiment Description and Results
20
2.2.2 General Behaviour of Light-Frame Systems and Components
Light-frame structures are assembled from components or sub-assemblies with
repetitive members such as walls, floors and roof systems connected by inter-
component connections such as nails, bolts and metal plate connectors. One common
configuration of a light-frame structure is shown in Figure 2.1. Resistance to lateral
loads is commonly provided by shear-wall or diagonal bracing systems, connected
through horizontal diaphragms such as the roof and floors. These elements can be
connected together in an almost infinite variety of configurations. The detail of the
various connectors and fasteners, and the panelling and materials vary from region to
region, and vary even within the same locality (Cobeen, 1997). Foliente and Zacher
(1994), Barton (1997) and Gad (1997) have reviewed the literature on experimental
testing of light-frame timber and steel structural components. Much of this work has
focussed on the behaviour under reverse cyclic loading, due to the complicated
characteristics of the load-displacement behaviour (or hysteresis) of such systems.
The majority of the available experimental cyclic test data are based on tests of
connections and sub-assemblies such as shear-walls and diaphragms.
A common observation from the sub-assembly tests is that the hysteretic behaviour of
a sub-system is governed by the hysteretic characteristics of its primary connection
(Dowrick 1986). For example, Stewart (1987) and Dolan (1989) reported that the
behaviour of shear-walls is dominated by the nailed sheathing connection. It is
therefore crucially important to characterise the hysteretic behaviour of the primary
connections and/or sub-assemblies in order to characterise the overall behaviour of
light-frame structural systems.
Figure 2.2 shows typical hysteresis data from cyclic tests of connections and
subassemblies in light-frame construction. Figures 2.2 (a), (b) and (c) show the
hysteretic behaviour of a plywood sheathed nailed joint, a light-gauge steel stud wall
with plasterboard lining and a plywood sheathed shear-wall, respectively. Several
characteristic features of the cyclic response of these systems can be noted (Foliente
1995):

Chapter 2 – Experiment Description and Results
21
• a non-linear, inelastic load-displacement relationship with no distinct yield
point
• progressive loss of stiffness with each loading cycle (stiffness degradation)
• degradation of strength when cyclically loaded to the same displacement level
(strength degradation)
• pinched hysteresis loops (i.e. the hysteresis loops appear to have been
‘pinched’ together about the origin).
The observed non-linearity, lack of distinct yield point, and the strength degradation
of the hysteresis of these systems, stems from the combination of material properties
of the individual components that make up the system such as the nails, screws, plate
connectors, timber, steel etc. The observed degradation in stiffness and the pinching
of the hysteresis loops, are a result of the behaviour of the dowel-type fasteners which
connect the elements of the light-frame structure together. These connections loosen
due to the distortion of the fastener holes, and become slack under cyclic loading
resulting in slippage under reversal of the applied load. As the amplitude of the
applied cyclic load or displacement increases, the amount of slippage also increases.
Initial slackness, due to shrinkage or clearances at fastener holes has also been
observed in some tests (Dean et al. 1989).
The response of light-frame systems to cyclic loading is also load-rate dependent (for
timber) and exhibits memory, so that the response of the system at any given point in
time depends on the past force-displacement history (Whale, 1998). Memory in the
hysteresis and load-rate-dependence cause difficulties when determining how to apply
loads and forces in physical experiments on light-frame components. The order and
number of inelastic excursions as well as the rate of load or displacement application
in a cyclic test can significantly alter the behaviour. Several testing protocols have
been proposed and are currently used (ISO 1999, Foliente et al. 1998a, Shepherd
1996). Recently, as part of the CUREE-Caltech Woodframe Project (Hall, 2000),
physical testing protocols have been specifically developed to represent the seismic
demands imposed by earthquakes on timber buildings (Krawinkler et al., 2000).

Chapter 2 – Experiment Description and Results
22
The complex nature of the hysteresis which is typical for light-frame construction,
makes it difficult to analyse or predict the behaviour, particularly under dynamic
loads. In a dynamic analysis, the response of the structure is sensitive to the natural
frequency, which is a function of the structural mass and the stiffness, and on the
strength capacity (Paevere and Foliente, 1999). As can be seen in Figure 2.2, the
stiffness and strength capacity of light-frame components varies considerably,
depending on the previous response. This means that in order to accurately predict
the dynamic behaviour using a numerical model, it must be able to track and vary the
strength and stiffness appropriately in the hysteresis (Chopra and Kan 1973; Iwan and
Gates, 1979). In Chapter 3, numerical modelling of hysteretic behaviour is reviewed
in detail and a differential hysteresis model is presented which can accurately
characterise the complex hysteretic behaviour of light-frame structures and
components.
2.2.3 Whole Building Testing of Light-Frame Structures
Testing of isolated components and sub-assemblies used in light-frame construction,
as described in the previous section, provides an indication of the load and
displacement capacity of the test component. Isolated component testing can also be
used to approximately derive overall structural behaviour when used in conjunction
with analytical models. The results of these tests are limited however, because
boundary conditions, loading mechanisms, and system effects may not be able to be
simulated properly in an isolated component experiment. Assumptions about the
load path(s) which are dominant within the structure must be made, yet load-sharing
and distribution in light-frame construction are not well understood (Boughton, 1988).
These effects can only be studied through full-scale whole-system testing, combined
with analytical modelling.
Testing of full-scale light-frame structures dates back to 1957 in Canada, where one
of the first reported experiments was conducted by Dorey and Schriever (1957), on a
single-storey timber-frame house. Since then the bulk of the tests on light-frame
structures have been conducted in the USA and Australia during the last three
decades. A number of full-scale static and dynamic tests of Japanese-style post-and-

Chapter 2 – Experiment Description and Results
23
beam heavy timber-frame houses have also been conducted in Japan, but these are not
considered to be ‘light-frame’ structures. An extensive review of the Japanese studies
is given in Fischer et al. (2001) and a summary of this review is reproduced in Table
2.1.
In the following, the static and dynamic testing of full-scale light-frame structures is
reviewed. A summary of the experimental studies reviewed herein is given in Table
2.2 Analytical modelling of the whole-building behaviour of light-frame structures is
reviewed in Chapter 4.
Static Testing
Since Dorey and Schriever (1957), static testing of full-scale light-frame structures
has been conducted by Tuomi and McCutcheon (1974), Reardon (1986, 1990),
Stewart et al. (1988), Reardon and Mahendran (1988), Phillips (1990), Reardon and
Henderson (1996), and Richins et al. (2000) amongst others. Many of the studies
have pointed towards the importance of the interactions between the sub-assemblies
of the light-frame building and the load-sharing mechanisms. The effect of the
boundary conditions and the loading mechanisms on the behaviour of individual
components in the whole building are also highlighted in some of the studies.
Tuomi and McCutcheon (1974) conducted static tests on a full-scale single-storey
house. They investigated the racking resistance contributions provided at various
stages of construction, by adding them incrementally. They also examined the racking
resistance under combined wind and snow loading, and the deflection and cracking
behaviour around door and window openings.
Stewart et al. (1988) tested two manufactured homes under simulated wind-loading.
This study was focussed on the effect of transverse walls on racking resistance, and
the interaction between the roof diaphragm and the shear-walls. They concluded that
the roof system was far stiffer than the shear-walls, such that the system could be
appropriately modelled as a stiff beam on elastic foundations.

Chapter 2 – Experiment Description and Results
24
Richins et al. (2000) also conducted a series of structural tests on a typical
manufactured home under simulated design-level wind loads. In this test, distributed
loads were applied using a pressurised air bag on the side of the house, and
concentrated loads were applied at the ceiling level. They measured the global
displacements of the house and reactions in the tie-down straps and concluded that the
racking and slip displacements were small under design-level wind loads.
Phillips (1990) and Phillips et al. (1993) recorded the reaction forces beneath
individual walls under static-cyclic loading, to address the problem of load-sharing
and load-redistribution within a non-linear system. The main conclusions from this
work were: 1) the wooden roof behaved as a rigid diaphragm and contributed
significantly to lateral load-sharing among the shear-walls; 2) up to 20% of the lateral
load was carried by the transverse walls at small load levels; 3) the transverse walls
did not contribute to load-sharing; and 4) the stiffness contributions provided by
individual layers of sheathing were directly additive. These experiments offered
important insight into load-sharing in a full-scale building with regular geometry.
Properties of individual members, connections and sub-assemblies of the
experimental house were established prior to the entire building test. This makes the
test suitable for validation of analytical models (Kasal et al., 1994).
At the James Cook Cyclone Structural Testing Station in Australia, different
configurations of light-frame houses under static loads, representative of high wind
loading, have been tested. The testing has included single-storey timber-frame brick-
veneer houses (Reardon, 1986; Reardon and Mahendran, 1988), a two-storey split-
level timber-frame brick-veneer house (Reardon and Henderson, 1996) and a single-
storey light gauge steel-framed brick-veneer house (Reardon, 1990). The main focus
of all the studies was to examine the response to a design level wind load, including
uplift. Wind-tunnel testing was also used to determine appropriate load distributions
used in the experiments. These studies highlighted the importance of the component
interactions, and the effect of the boundary conditions and non-structural components,
but are only applicable for the small displacement levels induced by wind-loading
conditions simulated in the experiments. Some of these tests also showed that
commonly accepted assumptions regarding load-sharing and ductility were invalid,

Chapter 2 – Experiment Description and Results
25
and in some cases un-conservative, but that structural redundancies which were
usually ignored, unintentionally compensated for this.
Dynamic Testing
Dynamic testing of full-size light-frame structures has been far less common than
static testing, presumably due to the high costs involved. Tests have been conducted
by Suzuki et al. (1996), Gad et al. (1998), Gad (1997) and most recently by Beck et al.
(2001) and Fischer et al. (2001). A summary of these studies is given in Table 2.2.
A number of full-scale dynamic tests of Japanese-style post-and-beam heavy timber-
frame houses have also been conducted in Japan. Tanaka et al. (1998), Kohara and
Miyazawa (1998), Ohashi et al. (1998), Yamaguchi and Minowa (1998) and Seo at al.
(1999) have all conducted dynamic tests, but these are not reviewed here as they are
not ‘light-frame’ construction. These studies are reviewed extensively in Fischer et
al. (2001) and a summary of this review is reproduced in Table 2.1.
Suzuki et al. (1996) and Gad et al. (1998) used an impact hammer to estimate the
natural frequencies and mode shapes of three different wooden houses and cold-
formed steel-framed houses, respectively. None of the reported experiments contained
instrumentation to measure forces between components, making it very difficult to
determine the load distribution within the structure from these results alone. Some
indication of load paths, under elastic response conditions can be derived from the
measured mode shapes. In more recent experiments of this type, Beck et al. (2001)
conducted forced and ambient vibration testing of low-rise light-frame buildings,
combined with analysis of recorded earthquake responses, to determine the natural
period and damping vales. They used their results to determine a more accurate
formula for estimating the fundamental period of timber structures for use in
earthquake design procedures.
Gad (1997) tested a one-room (2.3m x 2.4m) brick-veneer house with a light gauge
steel frame and plasterboard lining. These tests were mainly focussed on the
contribution of the non-structural components to the seismic response, particularly the

Chapter 2 – Experiment Description and Results
26
plasterboard lining. Racking tests, swept frequency dynamic tests and shake-table
tests were performed incrementally as the non-structural components were added to
the frame. Critical components such as brick-ties and plasterboard fasteners were also
tested. In accordance with previous whole structure tests, Gad also found that
boundary conditions imposed on a wall by the surrounding structure have a significant
effect on the lateral load resisting capacity. Analytical modelling based on the
experiments was also undertaken (see Chapter 4).
Most Recently, Fischer et al. (2001) have conducted an extensive program of shake-
table tests at the University of California, San Diego, on a two-storey timber frame
house as part of the CUREE-Caltech Woodframe project. Broad details of this project
are given in Chapter 1. The structural components used in the house were full-scale
although the plan dimensions (4.9m x 6.1m) were smaller than a typical house due to
the size of the shake-table. Their objective was to determine seismic performance
under different levels of seismic shaking and for different structural configurations.
Their results showed that a fully engineered timber-frame house has better seismic
performance than a conventionally constructed house. The tests were conducted
incrementally to assess the contributions of different elements to the response and it
was found that the non-structural wall finishes considerably stiffened the structure and
reduced the response level. Individual material and connection properties were
obtained for the components used in the house, and frequency and damping evaluation
tests of the whole structure were conducted. Significant analytical modelling studies
have also been undertaken (see Chapter 4), based on the experimental results.
2.2.4 Summary of Research Needs and Opportunities – Light-Frame Testing
1. The properties and characteristics of the inter- and intra-component connections
govern the overall behaviour of light-frame structures. Understanding the
hysteretic behaviour of these connections through physical testing and accurate
analytical modelling is therefore essential in order to predict performance of light-
frame structures.

Chapter 2 – Experiment Description and Results
27
2. Simulation of the boundary conditions and loading mechanisms provided by the
surrounding structure are essential when testing light-frame connections and sub-
assemblies such as walls. This understanding can only be achieved through
integrated whole-building and component testing and analytical modelling of the
components and the whole structure.
3. Previous whole-building tests have been mainly focussed on failure observations
and determination of global behaviour. Even though in some cases a lot of
information was collected, these test results alone have limited engineering use.
Experimentally validated mathematical models for the analysis of light-frame
structural systems are needed to extend the usefulness of experimental data and to
perform parametric and sensitivity studies.
4. No detailed conclusions about load path within the structure [with the exception of
Phillips’ (1990) test on a house with regular plan and elevation] can be drawn.
Load-sharing and load-distribution mechanisms need further study, especially on a
house with irregular plan and elevation.
5. Little is known about specific properties of materials, connections and sub-
assemblies used to construct the full-building experimental models. This makes it
difficult to use the information for validation of analytical models. Most testing in
the past was planned and conducted without consideration of analytical modelling
requirements.
6. Full-scale response data of light-frame buildings under cyclic loading need to be
obtained (from laboratory tests and field measurements of instrumented
buildings), compared with component test results and used in validation and
refinement of analytical models.

Chapter 2 – Experiment Description and Results
28
Table 2.1 – Summary of full-scale experiments on timber structures (Fischer et al. 2001).

Chapter 2 – Experiment Description and Results
29
Table 2.2 – Summary of full-scale experiments on light-frame structures.
Reference Test Specimen Loading Focus of Research
Tuomi and McCutcheon
(1974)
Single-storey timber-
frame with plywood
bracing
Earthquake
lateral static-cyclic
Contributions of different structural
elements to racking resistance
Reardon
(1986)
Single-storey timber-
frame with brick-
veneer
Wind
lateral and uplift point
loads
Response under cyclonic design
wind loads
Reardon and
Mahendran
(1988)
Single-storey timber-
frame with brick-
veneer
Wind
lateral and uplift point
loads
Response under design wind loads
Stewart et al.
(1988)
Single-storey
manufactured
Wind
lateral point loading
and pressurised air
bag
Racking resistance provided by
transverse walls and interaction of
roof-diaphragm and walls
Phillips
(1990)
Single-storey timber-
frame with plywood
bracing
Earthquake
lateral load-controlled
static-cyclic loading
Load-sharing, effect of transverse
walls and stiffness contributions of
sheathing layers
Reardon
(1990)
Single-storey light-
gauge steel-framed
with
brick-veneer
Wind
lateral and uplift point
loads
Response under cyclonic design
wind loads
Reardon and
Henderson
(1996)
Two-storey split-level
brick veneer
Wind
lateral and uplift point
loads
Performance of different structural
elements, and response levels under
design wind loads
Williams et al
(2000)
Single-storey
manufactured house
Wind
lateral point loading
and pressurised air
bag
Response under design wind loads
Suzuki et al.
(1996)
Two-storey light-frame
timber houses
Impact
impact hammer and
electric vibrator
Measure natural frequencies and
mode shapes
Gad et al.
(1998)
Light-gauge steel-
framed houses
Impact
impact hammer
Measure natural frequencies and
mode shapes
Gad
(1998)
One-room light-gauge
steel-framed house
Earthquake
lateral static-cyclic,
swept frequency and
ground motion using
shake-table
Contribution of plasterboard lining to
earthquake resistance
Beck et al.
(2001)
low-rise timber
buildings
ambient vibration
and centrifugal shaker
Measure natural frequencies and
damping
Fischer et al.
(2001)
Two-storey timber-
frame house with OSB
sheathing
Earthquake
swept frequency and
ground motion using
shake-table
Examine seismic performance under
different levels of seismic shaking for
various building configurations

Chapter 2 – Experiment Description and Results
30
Figure 2.1 – Typical two-storey light-frame construction (NAHBRC, 2000).

Chapter 2 – Experiment Description and Results
31
(a) plywood sheathed nailed joint on wooden stud (Foliente, 1995)
-40
-30
-20
-10
0
10
20
30
-30 -20 -10 0 10 20 30
Displacement (mm)
Load
(kN)
(b) light-gauge steel stud wall with plasterboard sheathing (Gad, 1999)
-20
-10
0
10
20
-200 -100 0 100 200
Displacement (mm) (c) plywood sheathed shear-wall (Kawai, 1998)
Figure 2.2 – Typical hysteresis data from tests of components in light-frame
construction.

Chapter 2 – Experiment Description and Results
32
2.3 Experiment Description
2.3.1 Background
In order to address the research needs outlined in the previous section and in Chapter
1, a program of experiments, on a full-scale L-shaped timber-frame house and its
individual components and sub-assemblies was designed. A major objective of the
experiments was to collect data for calibrating and validating a suite of numerical
models of the structure, comprising:
• a detailed FE model
• a hysteretic shear-wall model
• lumped mass models (SDOF and shear-building)
The other major objective of the whole-structure testing, was to completely measure
the displaced shape and distribution of the applied loads throughout the structure
under elastic and inelastic response conditions, to examine the amount of load-
sharing, and the load-distribution mechanisms.
All testing was carried out at the Commonwealth Scientific & Industrial Research
Organisation (CSIRO) division of Building, Construction and Engineering at their
full-scale testing facility in Melbourne, Australia. This facility is capable of testing
full-scale structures (up to three storeys high) to destruction under static or static-
cyclic loading. The facility has a ceiling height of 12 metres and a reaction wall with
a point load capacity of 100 kN. The main feature of the laboratory is the strong
floor, which has an area of 370 square metres and is fully accessible from underneath,
via the basement. The floor can withstand distributed loading of 48 kPa and point
loading of 500 kN with negligible deflection.
The design and layout of the test house, were chosen to represent a typical ‘stick
frame’ or ‘stud-frame’ single-storey house in North America. The specifications were
jointly developed by the National Association of Home Builders (NAHB) Research
Centre in the USA and researchers at CSIRO and North Carolina State University.
Slight modifications were made to the construction materials used (Australian

Chapter 2 – Experiment Description and Results
33
equivalents to US materials were used) and the floor plan (the size of the rooms were
adjusted slightly to match the strong floor anchorage layout in the CSIRO full-scale
testing facility).
The house consisted of the ‘structural’ elements only (i.e. no finishes such as doors,
windows, trims or cladding were used). The experiment was designed in this way so
that it best satisfied the implicit assumptions which are the basis of the FE modelling
strategy (as outlined in Chapter 4), and so that the behaviour of the main structural
elements would be the basis for any conclusions (see section 2.9). Although finishes
were not included, the house shell was constructed such that it could be clad
externally with vinyl or timber siding on the walls and vinyl, slate or asphalt tiles on
the roof.
2.3.2 Testing Program
The overall experimental testing program comprises five stages:
1 Elastic tests – small point loads were applied laterally, at the ceiling or ridge
level, at various locations in the house to determine the extent and the
distribution of the load within the structure. To avoid irrecoverable damage, the
total house displacement in these tests was targeted to be less than ±1.0mm.
2 Non-destructive dynamic tests – the natural frequencies of the house in the
main racking modes, were obtained by measuring the acceleration response
from dynamic impact tests using an instrumented hammer.
3 Destructive test – a lateral cyclic load was applied statically (in line with the
long direction) until failure, cyclic displacements up to +/- 120mm were
applied.

Chapter 2 – Experiment Description and Results
34
4 Isolated wall tests – in a separate research project, all of the walls in the house
will be tested individually (to destruction) as isolated or free-standing walls.
5 Coupon tests – in a separate research project, the materials and typical details
used in the house will also be tested; these tests will include:
• materials tests
o bending properties of sheathing panels
o modulus of elasticity of all framing materials
• sheathing joints
o plywood to stud
o gypsum to stud
• inter-component connections
o wall to wall (tee junction and corner junction)
o ceiling to wall
o roof truss to wall
Note that the experiments in stages 4 and 5, are the subjects of separate research
projects, and are not presented here. Their purpose is to facilitate full validation of a
three-dimensional non-linear FE model, and to compare the behaviour of
subassemblies when isolated to their behaviour when acting as part of the full
structure. They are included in the description of the testing program to give the
reader an appreciation of the wider goals that the work in this thesis forms a part of.
2.3.3 Description of the Test House
For the purposes of the experiments described here, the house was assumed to be built
on a concrete slab foundation and to consist of the ‘structural’ elements only, and the
plasterboard lining. The following non-structural elements were not installed in the
test house:
• tapes and joint compound in the interior joints between intersecting walls
• tapes and joint compound or cornices between the wall and ceiling lining
• windows and doors and their frames

Chapter 2 – Experiment Description and Results
35
• interior and exterior door and window trims
• exterior wall and roof cladding
The house walls were constructed from Australian Radiata Pine with an average
density (at 12% moisture content) of 550 kg/m3 (Southern Yellow Pine could be
considered the US equivalent). Wall frames were assembled from 90x35mm studs at
400mm centres, without blocking, double 90x35mm top plate and a 90x45mm bottom
plate. Studs were end-nailed to top and bottom plates using 3.05x75mm machine-
driven nails (two per end). Hold-down restraints (i.e. on end studs) were not used in
any of the walls. The bottom plate of all walls was anchored to a grid of load cells
using 12.5mm bolts and plate washers at approximately one-metre spacings.
The internal lining was a 13mm gypsum board (plaster board), laid horizontally, and
attached by self-drilling screws at 300mm spacings. The gypsum lining was not
connected with tape and joint compound in the corners between the ceiling and the
roof panels, or between intersecting walls. However, in-plane joints in the gypsum
lining within the wall and ceiling panels were joined with tape and joint compound.
Wall bracing was provided by 9.5mm external plywood sheathing, attached with
2.87x50mm machine driven nails at 150/300mm spacings (i.e. 150mm on perimeter,
300mm internally). The roof was constructed of pre-fabricated trusses (pine) laid out
without blocking on 600mm spacings, sheathed with 12.5mm plywood and fastened
using 2.87 x 50mm machine driven nails at 150/300mm spacings.
A summary of the house construction and materials is given in Table 2.3. Plan
dimensions of the test house, the coordinate system and the wall notation used are
shown in Figure 2.3 (a), and elevations are shown in Figure 2.3 (b). Overall details of
the house, including a summary of the framing and sheathing are depicted in Figures
2.3 (c) and (d). A summary of the individual wall dimensions and sheathing layout are
shown in Figure 2.3 (e). Photographs of the test house at different stages of
construction are given in Figure 2.4.

Chapter 2 – Experiment Description and Results
36
The four main shear-resisting walls in the house in the North-South direction, walls
W1-W4, were carefully chosen to represent a range of different but typical wall
configurations used in a timber-frame house. Wall W1 represents the front of a
garage, and is a short load-bearing wall with a very large opening, Wall W2 is in
effect a medium length load-bearing wall with a small door opening and two small
window openings. Wall W3 is a long non-load bearing wall, clad with plasterboard on
both sides, with only one narrow doorway opening in the middle. Wall W4 is a long
load bearing wall with both small and large openings. The perimeter walls are
connected to the roof and ceiling system with ‘triple-grip’ type connecters, which join
the top plate of the wall to the bottom chord of the roof trusses. Note that wall W3 is
not structurally connected to the roof and ceiling system, as the roof trusses are
designed to span between the perimeter walls. However the roof trusses are installed
with some light metal brackets (with slotted nail holes) which connect the bottom
chord to the top plate of wall W3 to ensure that the trusses remain ‘in-plane’.
Each of the four main walls was constructed with a 3mm steel strap embedded in the
double 90x35mm top plate, as shown in Figure 2.5 (a). The connection between the
steel strap and the loading mechanism, through a rod-end is shown in Figure 2.5 (b).
The additional strength provided by the steel strap may have had a minor effect on the
behaviour of the top plate during the destructive test. The strap was considered
necessary however, to provide a loading mechanism which would allow applied loads
to be distributed along the length of the walls in both the ‘pull’ and ‘push’ directions,
and to avoid localised failure mechanisms from occurring at the loading points, which
would be likely under the severe loads and displacements which were to be imposed
during the destructive test. Such localised failure mechanisms would render the
destructive experiment meaningless.
The non-symmetrical L-shaped plan of the house was chosen for two reasons: 1) to
extend and complement previous work done by Phillips (1990) on a symmetrical plan
house with different wall types; and 2) to ensure some torsional component to the
response, and hence full engagement of all of the structural sub-systems including the
roof. This is important for obtaining an understanding of the load paths within the
building.

Chapter 2 – Experiment Description and Results
37
Table 2.3 – Summary of test house construction and materials.
Wall Framing: Studs: 90x35mm MGP 10 spaced @ 400mm centres without blocking Lower Plate: 90 x 45mm MGP 10 Top Plate: double 90 x 35mm MGP 10 Header Plates: 190x90 (short span); 290x90 (long span) Lower Plate Anchorage: 12.7mm bolts with plate washers spaced @ approx. 1000mm MGP 10 Characteristic Properties: Average density (at 12% moisture content): 550 kg/m3
Bending (90 x 35mm):16 MPa, Bending (90 x 45mm) 19 MPa Tension Parallel to Grain: 8.9 MPa, Shear: 5.0 MPa Compression parallel to grain: 24 MPa
E: 10 000 MPa (short duration), G: 670 MPa (short duration) Roof Framing: Trusses: Pre-fabricated ‘gang-nailed’ pine trusses spaced @ 600mm centres; no blocking; Truss Connectors: Connected to top plate with pryda ‘triple-grip’ plate connectors Truss Top and Bottom Chords: 90x35mm MGP10 Truss Web Members: 70x35mm MGP10 Plywood Bracing: Walls: 2400 x 1200 x 9.5mm F11 Bracing Ply (Laid Vertically) Roof: 2400 x 1200 x 12.5mm F11 Ply (Laid Horizontally) Complies with AS 2269-1994, Plywood - Structural F11 Plywood Characteristic Properties:
Bending: 11.0 MPa, Tension: 6.6 MPa, Shear 1.80 MPa E:10500 MPa, G: 525 Mpa Gypsum Board Lining: 1200 x 2400 x 13mm Gypsum Board (Laid Horizontally ) Complies with AS 2588-1998, Gypsum Board Gypsum characteristic Properties:
Breaking force perpendicular to wrapped edge: 490 N Breaking force parallel to wrapped edge: 200 N
Minimum nail pull resistance: 270 N Fixing Nails: For use in framing All connections use 3.05 x 75mm machine driven (Senco nail gun) Stud to top and bottom plate: end-nailed x 2 Stud to stud: face nailed at 600mm spacings Sheathing Nails: For use on plywood 2.87 x 50mm machine driven (Senco nail gun) Spaced @ 150mm on perimeter, 300mm internally Sheathing Screws: For use on Gypsum wallboard ‘6 gauge’ x 30mm Needle-point Type 1 Gypsum board Screws (Self-Driven) Spaced @ 300mm on studs and truss bottom chords

Chapter 2 – Experiment Description and Results
38
6.2 3.0
5.1
6.15.1
6.1 W1
W2 W3 W4
W5
W6W7
W8
W9
N
S
EW
N
S
EW
2.0
destructive testloading points
‘push’
‘pull’
X
YZ
X
YZ
(a) Floor plan, coordinate system and wall numbering notation (dimensions in m)
Figure 2.3 – Details of test house.

Chapter 2 – Experiment Description and Results
39
East Elevation
West Elevation
North Elevation
SouthElevation
2.44.0
9.2
11.2
2.4
4.0
Pitch = 22o
Pitch = 28o
(b) Elevations (dimensions in m)
Figure 2.3 (cont’d) – Details of test house.

Chapter 2 – Experiment Description and Results
40
12.5mm ply roof
Pre-Fabricated Pine Roof-Trusses @ 600mm centres
13mm gypsum lining
90x35mm studs @ 450mm centres
Load-cell grid:60 load cells @ 1m centres
9.5mm ply bracing
90x35mm cords70x35mm web
N EW S
N EW S
ZYXZYX
(c) Schematic drawing of test house
Figure 2.3 (cont’d) – Details of test house.

Chapter 2 – Experiment Description and Results
41
90x35 studs @ 450 centres(no blocking)
90x45 bottom plate
double 90x35top plate
290x90 header
290x90 garage beam
plywood box beam over garage door
290x90 header
190x90 headers
190x90 header
N E
W S
N E
W S
(d) Wall framing only (dimensions in mm)
Figure 2.3 (cont’d) – Details of test house.

Chapter 2 – Experiment Description and Results
42
(e) Wall dimensions (m) and sheathing
Figure 2.3 (cont’d) – Details of test house.
gypsumply none
• All dimensions in metres• All walls 2.4m high• All doorways 2.0m high unless indicated• Small windows 1.0m wide x1.2m high• Large window 2.4m wide x 1.2m high• All walls gypsum sheathed
on side not shown
gypsumply none gypsumply none
• All dimensions in metres• All walls 2.4m high• All doorways 2.0m high unless indicated• Small windows 1.0m wide x1.2m high• Large window 2.4m wide x 1.2m high• All walls gypsum sheathed
on side not shown
W4
11.2
1.21.22.4 1.2 2.8
W3
11.2
6.01.24.0
W2
5.1
0.25 0.51.15
0.850.351.0 1.0
W7&6
6.0
2.0 0.4 1.2 2.4
W9
9.2
1.2 1.2 1.23.2 2.4
W8
3.0
0.5 1.1 1.4
W5
7.2
1.2 1.24.8
W1
6.1
0.6 0.64.9
2.1
1.21.2

Chapter 2 – Experiment Description and Results
43
(a) Wall framing only – near completion
(b) Plywood-sheathed walls and roof trusses
(c) Completed house without gypsum board lining
Figure 2.4 – Photographs of test house during construction.

Chapter 2 – Experiment Description and Results
44
(a) Diagram indicating location of embedded steel straps and loading points
(b) Close-up view of load cell connection to embedded strap via
universal joint
Figure 2.5 – Metal straps embedded in the top plate of walls W1-W4.
2.3.4 Load and Reaction Measurement
Reaction forces were measured underneath the bottom plate of the house throughout
the static and destructive experiments, through a grid of 60 load-cell units spaced
approximately one-metre apart. The load cell units were held in place and attached to
the strong floor of the laboratory via a heavy metal frame. The entire grid of load
cells supporting the house is shown in Figure 2.6 (a). The configuration of the three
cells in a typical unit, and the connection to the heavy metal frame are shown in
Figure 2.6 (b). The load cell units were connected to the bottom plate via a steel
channel as shown in Figures 2.6 (c). The pin connection between the steel channel and
the load cell prevents moments being applied to the load cell in the direction of
loading. The entire load cell system had a stiffness of 350 kN/mm in the X direction,
325 kN/mm in the Y direction and 465 kN/mm in the Z direction. This means that the
load cells were around ten times stiffer than the initial stiffness of the whole house in
the direction of loading (see section 2.6). Loads in the actuators (i.e. the applied
loads) were also measured using calibrated load cells, as shown in Figure 2.5 (c).
Each load-cell unit, as shown in Figure 2.6 (b) is manufactured from three identical
shear-beam type load cells, which are connected together and oriented such that each

Chapter 2 – Experiment Description and Results
45
individual load cell measures the load in one principal direction [i.e. X, Y or Z as
shown in Figures 2.6 (b) and 2.3 (a)]. Equilibrium checks were performed at various
stages during their installation, and also during the experiments on the house by
comparing with actuator forces (see results in Appendix A and B), where the load cell
units were generally accurate to within ± 2% of the actuator loads. The load-cell units
were placed as close as possible to the edges of openings where the overturning forces
would be a maximum.
The steel channels which were used to connect the load cell units to the wall bottom
plates were intended to simulate the concrete slab foundation of the house. The
channels were continuous underneath the walls, but not across any of the door
openings or wall intersections. The use of the channels would have had some effect on
the distribution of load to individual load cells, particularly in the vertical direction
due to the redistribution of overturning actions, but it was the only viable option for
measuring the reaction forces under the house in such detail and in three directions.
This was not considered to be a major limitation however, since one of the major
objectives of the experiment was to gather data for calibration of a FE model of the
house. For FE model calibration, the load measurement system can be included in the
model by supporting the model of the house on an equivalent structure. Once the
model is calibrated, the effect of the reaction force measurement system on the
behaviour of the house can be examined and quantified.

Chapter 2 – Experiment Description and Results
46
12
11
10
7
8
9
13 14 15 16 17
33605958
57
56
55
54
53
1
52
51
50
494847
18 19 20
21
22
23
24
25
26
27
28
29
30
61 62 63
3132
42
4
41
4039 38 37 36 35 34
43 44 45 46
W1
W9
W7
W2
W6
W3
W8
W4
W5
2
(a) Grid of load cells supporting entire house
X cellX cellX cellX cell
Y cellY cellY cellY cell
Z cellZ cellZ cellZ cell
X
Y
Z
(b) Typical load cell units
(c) Load cell units and pin connections to supporting channel
Figure 2.6 – Photographs of load cell system.

Chapter 2 – Experiment Description and Results
47
2.3.5 Displacement Measurement
Displacements were measured throughout the static and destructive experiments in
three principal directions. The displacements were measured at the intersection of all
walls at both the top plate level, and also at the extreme corners of the roof. Wall W4
was more extensively instrumented than the other walls during the destructive test,
with diagonal displacements measured across all of the openings. This was done to
provide detailed calibration data for the FE model of the house. The bottom plate
displacements were measured to monitor any slippage or lifting of the bottom plate
from the load cell grid.
Four types of digital displacement gauges were used to measure displacements:
• 300mm digital callipers for large in-plane (X) displacements at the top plate level
• 150mm digital callipers for large out-of-plane (Y) and vertical (Z) displacements
• 25mm digital gauges for all bottom plate displacements and accurate measurement
of small displacements at selected top plate locations
• 450mm analogue potentiometer type gauges for all roof measurement and for
openings on wall W4
•
Photographs of the displacement measurement system are given in Figure 2.7 and the
position of the ceiling-level displacement gauges during the static and destructive
testing is presented in Figure 2.8.
2.3.6 Data Management
All of the load and displacement data generated in the static and destructive tests was
logged on an IBM Compatible PC. Altogether, 250 channels of data were recorded
during the experiments to completely capture the load distribution and displacement
response of the structure. Readings were taken once every two seconds, which was
sufficiently fast, given the slow rates of loading (see section 2.6). All of the load cells
and analogue displacement gauges were connected together by four separate RS485
lines which were then read into the serial port of the PC via RS232 converters.

Chapter 2 – Experiment Description and Results
48
(a) Measurement of bottom
plate displacement
(b) Measurement of large in-plane wall
displacements at top plate
(c) Displacement gauge support frames for
in-plane and out-of-plane top plate
displacements
(d) Attachment of displacement gauge
supports to house support frame
(e) Displacement gauge on roof above W2
(f) Displacement gauges on W4 openings
Figure 2.7 – Photographs of displacement measurement system.

Chapter 2 – Experiment Description and Results
49
W1
W2 W3 W4
W5
W6
W7
W8
W9
X and Y: in-plane wall gauges
X and Y: Roof mounted gauges
Z: uplift gauges
Key:
X
YZ
X and Y: in-plane wall gauges
X and Y: Roof mounted gauges
Z: uplift gauges
Key:
X
YZ
X
YZ
Figure 2.8 – Ceiling level displacement gauge locations.

Chapter 2 – Experiment Description and Results
50
(a) Threaded rod and turnbuckle at walls W1-W4
(b) Cable and turnbuckle at South end of ridge
(c) Portable car jack
Figure 2.9 – Loading mechanisms used in elastic testing.

Chapter 2 – Experiment Description and Results
51
The digital displacement gauges were multiplexed onto eight additional RS232 serial
ports on the computer. The entire instrumentation system, data visualisation and
storage was managed by a Microsoft EXCEL based application running under the
Windows NT4.0 operating system. The actuators used in the destructive test (see
section 2.6) were controlled by a separate PC with specialised controller software.
2.3.7 Documentation
In addition to the instrumentation described above, three fixed video cameras, a
roaming video camera and stills cameras were used to capture images of the damage
at different locations throughout the house during the destructive experiment.
Engineers were observing the damage states throughout the house, and describing it in
front of the video cameras.
2.4 Elastic Testing
2.4.1 Introduction
The primary aim in the elastic testing phase of the experimental program was to
determine the distribution of reaction forces underneath the house for a range of
elastic loading configurations. The measured data is to be used for validation of the
FE model under each of the different loading configurations to ensure that it correctly
predicts different load paths under elastic response conditions. In addition to this, the
measurements are to be used to better understand the system effects and load
distribution in light-frame structures.
2.4.2 Test Description
In this series of tests, small point loads, all less than approximately 10 kN, were
applied at the ceiling level at various places throughout the house and in various
combinations. Loads were also applied at the southern end of the ridge. The complete

Chapter 2 – Experiment Description and Results
52
distribution of the reaction forces underneath the bottom plate, and the displaced
shape of the house were measured in each test. The tests are referred to as ‘elastic’
tests since they were designed to limit the displacements to less than around 1mm, so
as not to induce any significant damage or permanent deformation. However, even
under these small displacement levels, the response is not purely ‘elastic’.
A summary of the tests conducted is given in Table 2.4, and in Appendix A. The
loads were applied manually using three different methods, depending on where the
load was to be applied:
• For loads applied at the top plate of walls W1, W2, W3 and W4, in the North-
South direction, a threaded rod with turnbuckle and 100 kN load cell assembly
was used. The rod was connected to the metal strap embedded in the top plate of
walls W1-W4 (as shown in Figure 2.5) at one end, and to a fixed reaction frame at
the other. Loads could be applied in both the ‘push’ and ‘pull’ directions at these
locations (directions as shown in Figure 2.3 (a)).
• For loads applied at the ridge level, a cable and turnbuckle with a 10 kN load
cell was used. The cable was connected to the ridge of the house via a long piece
of timber, nailed through the plywood sheathing into the top chord of the roof
trusses at the ridge. The other end of the cable was connected to the reaction wall
of the laboratory. Loads could only be applied in the ‘pull’ direction at the ridge.
• For all other locations, the loads were applied using a portable scissor-type car
jack and a one 10 kN load cell. The car jack applied load to the house via a thick
metal bearing plate (to avoid crushing) and a portable reaction frame, which was
bolted to the floor. Loads could only be applied in a pushing manner using this
method
Photographs of the three different loading systems are given in Figure 2.9.
2.4.3 Elastic Testing Results
The first set of measurements in the elastic testing (test 1) were taken to capture the
distribution of the vertical reactions of the house under its own self-weight, without
any applied loading. The results are shown in Figure 2.10 (a). Some of the load cells

Chapter 2 – Experiment Description and Results
53
are showing negative reactions, indicating that the bottom plate is lifting in that
region. This is most likely due to stresses caused when constructing the house and
bolting it to the support channel since checks of the load cells before and after testing,
without the structure present, indicated all cells to be working properly. All load cells
were zeroed before any of the static or destructive tests were conducted, to eliminate
any unrelieved stresses. The total sum of the vertical reaction forces shown in Figure
2.10 (a) is 50.775 kN, hence the mass of the house is 50.775 / 9.8 = 5.18 tonne. This
is consistent with the estimated mass, based on the nominal mass of the construction
materials used in the house. The approximate vertical distribution of the self-weight
is shown in Figure 2.10 (b). The estimated contributions from the roof, ceiling and
wall systems are given, with approximate vertical locations. The location of the
vertical centre of mass is also shown, and is located approximately at the ceiling level
of the house.
After the self-weight had been measured, the load cells were zeroed and the series of
elastic tests outlined in Table 2.4 were conducted. Note that these results do not
include gravity forces since the load-cells were all zeroed after the weight had been
measured. The results for tests 3, 5 and 6 are presented graphically in Figures 2.11,
2.12 and 2.13, respectively. Results for the entire series of tests are summarised in
Table 2.5 and in Appendix A. An example of the results summary, as given in the
appendices is shown in Figure 2.14, for elastic test 12 (see Appendix A for notes on
this type of figure). These load distribution measurements provide the most detailed
picture of the reaction forces beneath a non-symmetrical light-frame structure, under
lateral loading, ever recorded.
Figure 2.11 indicates that significant load-sharing occurs between the main shear-
resisting walls in the house. It can be seen from the distribution of the in-plane (X
direction) reaction forces that a significant amount (50%) of the applied load is
resisted by the non-loaded walls. The vertical reactions (Z direction) are also
distributed to the non-loaded external walls. The applied load is distributed to the
non-loaded external walls mainly through the roof and ceiling diaphragm, and
partially through the transverse-walls, since the X-direction reactions in the
transverse-walls are very small in comparison to the in-plane walls. The applied load
is also distributed to the internal wall W3. This wall is not rigidly connected to the

Chapter 2 – Experiment Description and Results
54
roof and ceiling diaphragm and hence, the load is distributed partially via the
transverse-walls and partially via the non-structural connection between the top plate
and the roof trusses. The in-plane reactions in the external cross-walls (Y direction),
indicate the torsional nature of the response.
Similar behaviour is also true for elastic test 5, shown in Figure 2.12, where the load
is applied to wall W4 only, and elastic test 6, shown in Figure 2.13, where the load is
applied to wall W8 only. This behaviour is generally true for all of the elastic tests. In
Table 2.6, the amount of load resisted by the loaded wall (for tests where only a single
point load is applied) is compared to the amount of load resisted by the rest of the
structure. This indicates that between 19% and 78% of the applied load can be shared
by other parts of the structure under these conditions. As for the examples shown in
Figures 2.11 to 2.13, the applied load in all of these tests is generally distributed to the
non-loaded external walls through the roof and ceiling diaphragm. The amount of
load-sharing depends on the stiffness of the loaded wall, the connection to the roof
and ceiling diaphragm, and the configuration of the surrounding structure. As should
be expected under ‘elastic’ response, the amount of load-sharing is related to the
location of the loaded wall in the structure and the relative stiffness of the loaded wall
compared to the surrounding structure. Generally, the stiffer walls resist a larger
proportion of the applied load. In the test house, wall W3 is the stiffest wall, followed
by wall W4. A summary of the wall stiffness and capacity characteristics is given in
Table 2.7 (see section 2.6).
The amount of load-sharing observed in these elastic experiments, is a lower bound
estimate. This is because the applied loads are very small and hence all of the
structural sub-systems may not be fully engaged. It is shown in section 2.6 on
destructive testing, that the load-sharing increases significantly once the house is
pushed into the inelastic range.
In elastic test 12, which is summarised in Figure 2.14, all four North-South walls (i.e.
walls W1 to W4) were pushed simultaneously until their displacement reached around
1.1mm. Under this loading, the total sum of the X-direction reaction forces (i.e.
applied loads) was 27.5 kN, and no structural damage or permanent deformation was
apparent – all of the house walls essentially responded elastically. A hurricane-level

Chapter 2 – Experiment Description and Results
55
design wind load for the test house is around 30 kN, based on the wind load
provisions as specified in the Residential Structural Design Guide: 2000 Edition
(NAHBRC, 2000) for a 120-mph zone with an exposure ‘B’, which is equivalent to a
suburban exposure condition based on ASCE 7-98 (ASCE, 2000). Given that the
applied load was more than 90% of this design wind-load, and the response of the
structure was essentially elastic, the results of this test indicate that the test-house
should easily withstand this design wind load with minimal or no structural damage.
It is important to highlight that this conclusion is based purely on the lateral wind load
to the walls and does not consider uplift pressure on the roof. It should be noted that
test 12 was not intended to be a ‘wind-load’ test as such, but rather another load case
for model validation. The uniform displaced shape, and the associated load
distribution, are unlikely to be representative of the displacements and load
distribution under a real wind load. It should also be noted that no conclusions about
non-structural damage can be drawn, since the test house did not have trims, paint,
doors, windows etc, installed.

Chapter 2 – Experiment Description and Results
56
Table 2.4 – Summary of elastic testing program.
Test Description* Applied Load (N)
1 Dead Load Test gravity only
2 Load W1 to 0.3t 2780 (W1)
3 Load W2 to 0.5t 4790 (W2)
4 Load W3 to 0.5t 4920 (W3)
5 Load W4 to 0.5t 4920 (W4)
6 Load W8 to 0.5t 5183 (W8)
7 Load W8 to 0.5t, W2 to 0.5t 5134 (W8), -5070 (W2)
8 Load W5 to 0.5t 5160 (W5)
9 Load W5 to 0.5t, W4 to 0.8t 5170 (W5), -8040 (W4)
10 Load W2 & W5 to –0.5t, 0.3t -5120 (W2), 3184 (W5)
11 Load between W2 & W3 to 0.8t 6795 (btw W2, W3)
12 Push W1, W2, W3, & W4 1.1mm
1096 (W1), 5431 (W2), 15000 (W3), 6500 (W4)
13 Load roof ridge (5 deg. west) -5088 (ridge @ 5 deg. west)
14 Load roof ridge (10deg. west) -5208 (ridge @ 10 deg. west)
15 Load roof ridge (20 deg. east) -2797 (ridge @ 20 deg. west)
* t = tonne

Chapter 2 – Experiment Description and Results
57
722
1115
-1040
1962
1765
2505
1932
235
991473
14581351
1373
-73
907719
-673
900722
1328
1983
153
1423
289361
616525
800
-430
674399
1364
291
822
1472
1299
569 1431
2509
2277
1617
1607
2519
1031
976
2321
415
168334
1484
-1
792
90
-3
-1
Total Self Weight = 50.775 kN
(a) Measured horizontal distribution of vertical reactions under self-weight (in N).
Roof = 22.3 kN
Ceiling = 7.5 kN
Walls = 21 kN
0.8 m
1.0 m
1.4 m
Vertical Centre of Mass
0.8 m
2.35 m
(b) Approximate vertical distribution of self-weight (in kN).
Figure 2.10 – Horizontal and vertical distribution of self-weight for test house.

Chapter 2 – Experiment Description and Results
58
48
117
9177-1
16
87
20
-7
719
14
399393341
322333285
229
16 -26
86
2
6874
73
8480
8769
83
8890
75
85 7
-43
7
98105
103110
106104
9168
9180
13
17
27
21
4
Figure 2.11 – Displaced shape and reaction forces (N) for elastic test 3.
X Reactions
Displaced Shape
4790 N
Y
XZ

Chapter 2 – Experiment Description and Results
59
18-5
19-26
-149
-132
-105-117
-79
-74
40
5562
-24
59-28
-6-2
-5
46
160 117122
104
134
71
1-1
0-4
-4-3
-13
0-27 -82
-40-33
-256
6-4
12
-2-14
0
2-9
-69
-87
-19
-21-10
93
7495
-98
441
-476
-38
121 54 -10
40
74
112
-194
-15
175121
-520
494
1491
734
-223
61
-466
-328
-220
-111-111-85
-47
-7
70
111-55
-54
-25
4
42
69
110 13
-12
-45-52
-249
8244
-96
-49
245
-93
289
-206
212219
83
-29
-68-10
-270
-91-22
Figure 2.11(cont’d) -Displaced shape and reaction forces (N) for elastic test 3.
Z Reactions
Y Reactions
Y
XZ

Chapter 2 – Experiment Description and Results
60
1028
18103
33
-2
1
35
-22
33
7472
6461
665843
41
5-1
6
7988
87
9891
10684
106
115118
106
117
14
4
21
347330294
332328299
282208
306269
1-6
48
012
8
-158
Figure 2.12 – Displaced shape and reaction forces (N) for elastic test 5.
Displaced Shape
X Reactions
4920 N
Y
XZ

Chapter 2 – Experiment Description and Results
61
40
-315
69
72
7861
8483
12
1718 -10
-1-4
-1-1
-212
-50-55
-53 -80 -101
-50
1-1
-1
-2-2
-20
01
14
68
-8
-13-8
-31
17-10
1
71-29
6
1
24
7784
-15
-184
-103-90
-78
-17
106
-75
95125 55
459
57
70
-44
-829
19
-192
5620
2
149-52
-2
-173
-92
-66
-47-73-110
-68
-18
78
128-83
-74
-31
-5
40
75
112103
-47-34
-19
-362
473
187
-231
-106
751
-320
668
-674
169191198
-112-93
-37
-420-231-150
Figure 2.12 (cont’d) -Displaced shape and reaction forces (N) for elastic test 5.
Z Reactions
Y Reactions
Y
XZ

Chapter 2 – Experiment Description and Results
62
20
47
-8-7
4
63 -4
-6
-5
-6-7
-3-2
9
1588
11
20
8
2 -8
-2
3-1-8
-10-11
-10-12
-15-25
-8
-7-8
-8-9
1
2
-13
12
19
202115
189
20
1915
-4
-8
-28
9
-2
02
1
Figure 2.13 – Displaced shape and reaction forces (N) for elastic test 6.
Displaced Shape
X Reactions
5183 N
Y
XZ

Chapter 2 – Experiment Description and Results
63
37-8
-730
149141
134132
141135
146
242 226158
12-1
10
-1
529
8984
82
91
114
112
0-3
1
44
8946-1-6
1
36
118
257
199
130
91
-1-4
-3
33
16960
-5
20
113141
518549
71
90
7785
303191
63
161159 4348 -18
-4-58
22845
-180-131
1385711
0-34
-60-176
127 31-1
-14-3914
3-2
-4-6
-83
11775
478
-8-30
26
-185
166327
-165
-32
-12-55
-41
71
-623
-452
-182
-138-1269
-342
1025
-225
-175-3116
Figure 2.13 (cont’d) – Displaced shape and reaction forces (N) for elastic test 6.
Z Reactions
Y Reactions
Y
XZ

Chapter 2 – Experiment Description and Results
64
Table 2.5 – Results summary for elastic tests.
Test Measurement W1 W2 W3 W4 W5 W678 W9
in-plane displacement (mm) 1.03 0.28 0.03 0.06 0.02 0.00 0.13
X reaction (N): sum = 2861 610 1046 674 461 19 23 29
Y reaction:(N): sum = -45 35 29 -7 -7 624 487 -1206 2
Uplift:max (N) 861 174 73 159 170 266 10
in-plane displacement (mm) 0.50 0.59 0.29 0.11 0.01 0.00 0.06
X reaction (N): sum = 4676 333 2303 957 955 12 64 52
Y reaction:(N): sum = -15 6 29 -28 -14 900 -15 -893 3
Uplift:max (N) 476 520 85 249 466 194 10
in-plane displacement (mm) 0.09 0.08 0.30 0.06 0.01 0.00 0.01
X reaction (N): sum = 4886 53 305 3751 490 86 56 144
Y reaction:(N): sum = 80 7 3 -21 1 80 -29 39 4
Uplift:max (N) 73 88 375 107 170 153 0
in-plane displacement (mm) 0.11 0.09 0.16 0.42 0.03 0.00 0.02
X reaction (N): sum = 4835 67 438 1195 2995 16 73 51
Y reaction:(N): sum = 45 16 -6 4 -15 -610 -20 676 5
Uplift:max (N) 75 192 110 674 420 112 0
in-plane displacement (mm) 0.03 0.01 0.02 0.03 0.05 0.00 0.07
X reaction (N): sum = 117 52 78 -132 169 -2 -34 -13
Y reaction:(N): sum = 5004 52 45 219 278 711 2496 1203 6
Uplift:max (N) 0 176 83 623 175 342 126
in-plane displacement (mm) 0.44 0.60 0.28 0.07 0.04 0.00 0.13
X reaction (N): sum = -4957 -312 -2313 -1287 -838 -34 -93 -81
Y reaction:(N): sum = 5033 49 10 241 304 -268 2590 2107 7
Uplift:max (N) 246 773 156 683 0 372 348
in-plane displacement (mm) 0.08 0.07 0.00 0.13 0.26 0.00 0.01
X reaction (N): sum = 29 90 468 72 -587 -8 -9 3
Y reaction:(N): sum = 3795 21 61 137 50 2784 731 12 8
Uplift:max (N) 77 41 77 408 339 106 32

Chapter 2 – Experiment Description and Results
65
Table 2.5 (cont’d) – Results summary for elastic tests.
Test Measurement W1 W2 W3 W4 W5 W678 W9
in-plane displacement (mm) 0.12 0.11 0.40 0.94 0.37 0.00 0.04
X reaction (N): sum = -7857 -39 -318 -1317 -5994 -12 -122 -55
Y reaction:(N): sum = 4961 -7 94 168 75 4801 819 -990 9
Uplift:max (N) 122 209 141 1417 149 107 417
in-plane displacement (mm) 0.50 0.59 0.35 0.14 0.23 0.00 0.07
X reaction (N): sum = -5189 -284 -2061 -1505 -1157 -50 -74 -58
Y reaction:(N): sum = 3212 20 -7 66 62 1668 411 993 10
Uplift:max (N) 185 747 165 339 62 202 223
in-plane displacement (mm) 0.43 0.46 0.07 0.18 0.16 0.00 0.05
X reaction (N): sum = 6286 321 1922 2041 1597 207 89 109
Y reaction:(N): sum = -229 15 12 -28 -18 369 125 -705 11
Uplift:max (N) 437 524 169 342 528 163 0
in-plane displacement (mm) 1.18 1.17 1.10 1.11 0.03 0.00 0.07
X reaction (N): sum = 27515 803 4337 13951 7255 200 316 652
Y reaction:(N): sum = 234 62 44 -103 -41 726 42 -496 12
Uplift:max (N) 1091 1135 1563 1566 1286 618 0
in-plane displacement (mm) 0.41 0.36 0.30 0.30 0.00 0.00 0.01
X reaction (N): sum = -4859 -228 -1260 -1137 -2102 -23 -71 -39
Y reaction:(N): sum = 193 -6 -4 14 20 -37 137 68 13
Uplift:max (N) 249 489 146 614 0 123 272
in-plane displacement (mm) 0.32 0.26 0.19 0.25 0.03 0.00 0.01
X reaction (N): sum = -4977 -204 -1058 -1738 -1839 -19 -69 -48
Y reaction:(N): sum = 656 -6 3 22 20 386 182 48 14
Uplift:max (N) 246 415 202 522 0 102 246
in-plane displacement (mm) 0.17 0.14 0.10 0.08 0.04 0.00 0.01
X reaction (N): sum = 2450 -138 -670 -872 -695 -3 -31 -41
Y reaction:(N): sum = -792 -9 -14 -5 -3 -643 -191 74 15
Uplift:max (N) 185 220 103 210 0 30 112

Chapter 2 – Experiment Description and Results
66
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 1096 5430 15000 6500 0 0 0 sum 803 4337 13951 7255 200 316 652 27515
displ (mm) -1.18 -1.17 -1.1 -1.11 0.03 - 0.07
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 1155 1382 2016 1808 0 269 955 downforce sum 62 44 -103 -41 726 42 -496 234min -1091 -1135 -1563 -1566 -1286 -618 0 uplift
Figure 2.14 – Results summary for elastic test 12.

Chapter 2 – Experiment Description and Results
67
Table 2.6 – Load-sharing in elastic tests under single point load.
Test Loaded Wall
Loading Direction
% Resisted by Loaded Wall
% Resisted by Other Walls Combined
2 W1 N-S 22% 78% 3 W2 N-S 50% 50% 4 W3 N-S 81% 19% 5 W4 N-S 63% 37% 6 W8 E-W 57% 43% 8 W5 E-W 78% 22%
2.5 Dynamic Impact Testing
2.5.1 Experiment Description
In any dynamic modelling of structural behaviour, it is crucially important to correctly
characterise the fundamental frequencies of vibration of the structure, if accurate
response predictions are to be obtained. In this phase of the testing, the natural
racking-mode frequencies of the test house in the North-South direction and the East-
West direction were obtained by measuring the acceleration response from dynamic
impact tests. The North-South direction dynamic tests were performed both before
and after the elastic testing was conducted, to examine whether a noticeable change in
dynamic characteristics had occurred as a result of any damage caused to the house by
the elastic tests.
In the dynamic tests, the house was instrumented with five accelerometers and was
excited by hitting it with a rubber-tipped, instrumented impact hammer at the top-
plate level. Photographs of the equipment used are given in Figure 2.15. The structure
was excited at three different locations, along the top plate, to ensure that the
fundamental racking displacement mode was revealed in each direction. To ensure
repeatability, the test was repeated six times at each excitation location. The
excitation and accelerometer locations used in the vibration tests are shown in Figure
2.16.

Chapter 2 – Experiment Description and Results
68
2.5.2 Experiment Results and Discussion
During the experiments, the acceleration time history responses were recorded at each
accelerometer, for the three different excitation locations. The power spectrum of each
response, for each excitation location, was then calculated to give an indication of the
frequency content of the response. Each power spectrum was then examined for the
lowest natural frequency, with the lowest common frequency for each direction
representing the first mode response of the entire structure in that direction. The basic
assumption behind this method is that if the fundamental frequency is being excited in
the structure, it should be apparent in the responses from all locations for a given
direction. It is also assumed that the house is responding as a SDOF system, with the
mass concentrated at the ceiling level (see section 2.5.3 about test limitations).
Examples of the acceleration time histories and power spectra for three repeats of
selected tests, conducted before the elastic testing, are shown in Figure 2.17. These
plots show a consistent value for the fundamental frequency of 13.6 Hz (T=0.075 sec)
in the North-South direction and 14.8 Hz (T=0.068 sec) in the East-West direction.
The resulting power spectra from all of the experiments were combined, and the
normalised sum of the spectra is shown in Figure 2.18 (a). This plot shows the
fundamental frequencies in each direction more prominently. It can be concluded
from these tests that the house has a higher initial stiffness in the East-West direction
than the North-South direction. This is not obvious from the layout of the house,
since it is shorter in the East-West direction, however there are very few openings in
the East-West oriented walls (W5-W9), and as a result of this, their combined
stiffness could be higher than the North-South Walls (W1-W4) which have many
openings.
In Figure 2.18 (b), the North-South direction normalised spectra, from before and
after the elastic testing are compared. This shows that the frequency has shifted
slightly from 13.6Hz to 13.3 Hz during the elastic testing, and that the area under the
main spectral peak has increased slightly. The slightly wider spectral peak and the
small frequency shift indicate that some change has occurred in the dynamic
characteristics, inferring that some damage has occurred as a result of the elastic

Chapter 2 – Experiment Description and Results
69
testing. However, the change is only very small, and may not be significant, since the
potential level of error in this type of experiment is quite high (see section 2.5.3).
The fundamental frequency of the test house in the North-South direction can also be
derived using the results of other experiments. The initial lateral stiffness of the house,
measured at the ceiling level during the initial load-cycles of the destructive testing, in
the North-South direction, is 36 kN/mm (see section 2.6). The measured mass is 5.18
tonne, and can be assumed to be lumped at the ceiling level (see Figure 2.10).
Therefore the fundamental frequency can then be calculated approximately as
follows:
360.00518 13.3
2 2
kmFπ π
= = = Hz (2.1)
Which agrees with the value of 13.3 Hz calculated using the vibration measurements
taken after the elastic testing. This agreement is quite fortuitous given the error
associated with this method (see section 2.5.3), but does indicate that the test house
may be reasonably approximated as a SDOF system with all of the mass (above the
floor) concentrated at the ceiling level. As shown in Figure 2.10 (b), the mass which
participates in the dynamic response of the test house is distributed above and below
the ceiling level. For a real house, the vertical mass distribution, and the height of the
centre of mass will depend on the type of cladding (i.e. timber, stucco, vinyl) and roof
tiles (i.e. slate, vinyl, asphalt) which are used, and may not necessarily be located at
ceiling level. Dynamic response sensitivity to the assumed mass is addressed in
Chapter 5.
Assuming that the East-West fundamental frequency is the measured value of 14.8 Hz
(T=0.068 sec), the initial stiffness can be calculated as 44.8 kN/mm as follows:
2 2(2 ) 0.00518(29.6 )k m Fπ π= = = 44.8 kN/mm (2.2)
It is not possible to compare this result against the results of the elastic or destructive
testing, since the responses in the East-West direction were not suitable for

Chapter 2 – Experiment Description and Results
70
determining all of the individual wall stiffness values. This is because the loading in
the destructive experiments was applied in the North-South direction only.
2.5.3 Comments on Experiment
The results of these tests, when considered in isolation, must be used with caution,
since it may not be appropriate to use them for predicting either the static or dynamic
behaviour of the house. The natural frequencies measured by this method are unlikely
to be representative of the dynamic response of the house under earthquake loading.
This is because the vibration amplitudes induced in the structure by these tests are
very small, because the energy imparted onto the structure by the hammer is also
small. Hence, the measured vibration frequency is based on the initial tangent
stiffness of the house. As described in section 2.2, the load-displacement curve for a
timber structure is non-linear from the origin, hence the stiffness changes
significantly, depending on the value of load or displacement. For this structure, the
initial stiffness in the North-South direction (37 kN/mm) is approximately double that
calculated at a displacement of 1.0mm (17.5 kN/mm). This means that the measured
vibration frequency, is highly dependent on the amplitude of vibration induced in the
test, and hence, the use of a different excitation system (such as a larger hammer or a
vibrator), may result in a significantly different observed frequency of vibration. The
dependency of the natural frequency on the magnitude of the displacement response
(as well as the response history) poses a challenge when modelling and analysing the
dynamic behaviour of this type of structure. These challenges are outlined in more
detail and addressed in Chapters 3 and 4.
As indicated earlier, another limitation of these tests, is that the results are based on an
‘unfinished’ house which does not have, roof-tiles, cladding, trims, doors or windows,
and hence the mass, and hence the vertical and horizontal distribution of the mass in
the test-house, may be significantly different than for a ‘real’ house. Also, the
stiffness of a ‘real’ house may be higher due to the non-structural finishes, especially
if an exterior finish similar to ‘stucco’ is used.

Chapter 2 – Experiment Description and Results
71
(a) Accelerometer attached at ceiling
level of wall W3
(b) Instrumented hammer used to excite
the structure
Figure 2.15 – Equipment used in dynamic impact tests.
N
S
EW
Loc 2Loc 1Loc 3
a1 a2 a3
a4 a5
Loc 2Loc 1
Loc 3
a1
a2
a3
a4
a5
NS Test EW Test
Figure 2.16 – Excitation and accelerometer locations for dynamic impact testing.

Chapter 2 – Experiment Description and Results
72
Acceleration (m/s2) Spectral density
-1
-0.5
0
0.5
1
1.5 2.5 3.5
-1
-0.5
0
0.5
1
1.5 2.5 3.5
-1
-0.5
0
0.5
1
1.5 2.5 3.5
0.00E+001.00E-062.00E-063.00E-064.00E-065.00E-066.00E-067.00E-06
0 10 20 30 40 50 60 70
0.00E+00
5.00E-06
1.00E-05
1.50E-05
2.00E-05
0 10 20 30 40 50 60 70
0.00E+00
5.00E-06
1.00E-05
1.50E-05
2.00E-05
0 10 20 30 40 50 60 70
Time (sec) Frequency (Hz)
(a) Accelerometer a3, North-South test configuration, excitation LOC 1
Figure 2.17 – Example acceleration time histories (three repeats) and power spectra from non-destructive dynamic impact tests.

Chapter 2 – Experiment Description and Results
73
Acceleration (m/s2) Spectral density
-1
-0.5
0
0.5
1
0.5 1.5 2.5
-1
-0.5
0
0.5
1
1 2 3
-1
-0.5
0
0.5
1
1 2 3
0.00E+001.00E-062.00E-063.00E-064.00E-065.00E-066.00E-06
0 10 20 30 40 50 60 70
0.00E+001.00E-062.00E-063.00E-064.00E-065.00E-066.00E-06
0 10 20 30 40 50 60 70
0.00E+001.00E-062.00E-063.00E-064.00E-065.00E-066.00E-06
0 10 20 30 40 50 60 70
Time (sec) Frequency (Hz)
(b) Accelerometer a5, East-West test configuration, excitation LOC 1
Figure 2.17 (cont’d) – Example acceleration time histories (three repeats) and power spectra from non-destructive dynamic impact tests.

Chapter 2 – Experiment Description and Results
74
0
0.2
0.4
0.6
0.8
1
5 10 15 20 25 30
Frequency (Hz)
NormalizedSpectral Density
14.8 Hz East-West
13.6 HzNorth -South
(a) Comparison of the NS and EW direction spectra before elastic testing was
conducted
0
0.5
1
5 10 15 20 25 30
Frequency (Hz)
NormalizedSpectral Density
13.6 HzBefore Elastic
Testing
13.3 HzAfter Elastic
Testing
(b) Comparison of the NS direction spectra before and after elastic testing was
conducted
Figure 2.18 – Normalised sum of the power spectra from dynamic impact tests.

Chapter 2 – Experiment Description and Results
75
2.6 Destructive Testing
2.6.1 Introduction
In the destructive testing, the displaced shape and the distribution of forces throughout
the structure under reverse-cyclic lateral loading were measured in detail. The primary
objectives of the destructive test were to: 1) obtain response data for numerical
models which incorporate the whole house behaviour, such as the shear-wall model
outlined in Chapter 4, and a detailed FE model which incorporates three-dimensional
system behaviour; and 2) to help understand whole-building response, system effects
and load distribution in light-frame structures.
2.6.2 Loading Mechanism
The main objectives in this phase of the testing are concerned with whole-building
behaviour and the load-sharing and system effects. Hence, an important consideration
in designing the loading, was to maximise the three-dimensional or torsional nature of
the response during the test, and ensure full engagement of all of the structural sub-
systems, including the roof and ceiling diaphragm. It was therefore decided to load
one side of the house only, with identical static-cyclic displacements applied to walls
W3 and W4, at the top plate level, under displacement control. Although this is
unrealistic in terms of any natural environmental loading, it was desirable for the
purposes of validating and calibrating the numerical models. If the models are to be
used to predict load-sharing and system effects, then they must be validated against
experiments which have exhibited such behaviours. Once the models are validated,
they can then be used to investigate house behaviour under more realistic
environmental loading scenarios. Model validation under the experimental loading
conditions, and subsequent analysis of behaviour under earthquake loading is
demonstrated for a ‘shear-wall’ model of the house in Chapter 5.
Simultaneous loading of all four North-South shear-walls was considered (i.e. walls
W1-W4), but was decided against because the load-sharing and system effects would
have been minimal and difficult to quantify with all walls loaded under displacement

Chapter 2 – Experiment Description and Results
76
control. Displacement control was used in the destructive experiment because of the
difficulties associated with load-controlled destruction of the house. This would have
required the design of a complex multi-actuator hydraulic control system, or an
impractically large spreader beam structure.
Three different loading rates were used in the destructive test, for different levels of
applied displacement:
• For displacements up to 10mm a rate of 2mm/min
• For displacements between 11-50mm a rate of 15mm/min
• For displacements between 51-120mm, a rate of 25 mm/min
These load rates were chosen to eliminate any dynamic effects in the response, and so
that an appropriate density of data could be obtained over one working day. The
displacements were applied using two motorised screw jacks, one of 200 kN capacity
at wall W4 and one of 100 kN capacity at wall W3. Photographs of the loading
system used in the destructive testing are given in Figure 2.19.
The loading protocol used in the experiment is shown in Figure 2.20. As was
highlighted earlier, the aim in determining the loading protocol, was to induce the
type(s) of structural response in the experiment, that are the most appropriate for
validating and calibrating the numerical models. In this work, the models will be
unique in that they will incorporate a range of phenomena, including 3D system
effects (especially in the FE model), and cyclic degradation in the walls (in the shear-
wall model) and inter-component connections, therefore the loading regime should
enable these phenomena to be observed in the experiment, by using reverse-cyclic
loading.
A reverse-cyclic loading protocol is in fact often used to simulate the way a test
specimen may respond under an earthquake load. Under earthquake loading, many
reversals of the load direction may occur. This is particularly important for a light-
frame structure, given that this type of construction is prone to cyclic degradation of
strength and stiffness, and pinching of the hysteresis (see section 2.2). Therefore
cycling of the load is vital when validating any numerical models which are to be used

Chapter 2 – Experiment Description and Results
77
for predicting response to earthquake loading. In addition to this, the irregular floor
plan will mean that the response under ‘push’ and ‘pull’ direction loading may be
different, hence reversal of the loading direction is also important.
It was therefore decided to use the reverse-cyclic protocol shown in Figure 2.20,
which is conceptually based on the draft ISO standard for joints (ISO, 2000; Foliente
et al., 1998a). This is a displacement-based protocol. Recently, cyclic loading
protocols designed specifically for timber structures have been developed by
Krawinkler et al. (2000) as part of the CUREE project (Hall, 2000). These were not
available when the experiments were conducted.
(a) Motorised screw-jack, push-rod and load cell assembly attached to walls W3 and W4
(b) Motorised screw jack and support
(c) House ready for destructive testing
Figure 2.19 – Photographs of load application system for destructive test.

Chapter 2 – Experiment Description and Results
78
-120
-80
-40
0
40
80
120
0 1 2 3 4Time (hrs)
Applied Displ (mm)
Figure 2.20 – Displacement-based loading protocol used in the destructive test.
2.6.3 Global Hysteresis Response
In Figure 2.21, the approximate global hysteresis response of the whole building, in
the direction of loading (North-South) is presented. The value on the ‘Load’ axis was
calculated by summing all of the reaction forces in the North-South direction in the
load-cells under the bottom plates, at a given point in time, and then repeating this for
all points in time during the experiment. These values are the same as the values of
the total applied load in the actuators. The value on the ‘Displacement’ axis is the
approximate centroidal displacement of the house in the direction of loading. The
global hysteresis response in Figure 2.21 contains no information about the response
of the house in the East-West direction. It will be shown later that the response in this
direction is minimal.
The global hysteresis response is characterised by ‘pinching’ at the origin, and
degradation of the strength and stiffness under cyclic loading. As described in section

Chapter 2 – Experiment Description and Results
79
2.2, This type of behaviour is to be expected from a light-frame system connected
with dowel-type fasteners such as nails and screws.
The initial stiffness of the whole house, is approximately 36 kN/mm, calculated at a
displacement of 0.2mm. The secant stiffness at 1.0mm displacement is 22.5 kN/mm
(see Table 2.7), indicating that the load-displacement curve is highly non-linear from
the beginning. This is also highlighted by the load-displacement envelope of the
global hysteresis, which is shown in Figure 2.22. The total capacity of the house, in
the direction of loading, is around 100 kN with maximum capacity being reached at
about 30mm displacement. The house is still resisting 80 kN at 80mm displacement
and 70 kN at 110mm displacement, indicating this type of construction is highly
ductile.
Given the severe loads and displacements applied to the building in this experiment,
and the global response of the structure, this type of single-storey building is well
placed to resist any lateral design-level load without danger of total collapse. However
this exact response cannot necessarily be extrapolated to other situations based on the
results of this experiment alone, though similar behaviour under similar conditions
can be expected.
Although total collapse under earthquake loading appears unlikely for the type of
single-storey building tested, the level of damage incurred is an important
consideration. More than half of the total cost of property damage from the 1994
Northridge earthquake was due to damage in timber-frame buildings (Kircher et al.,
1997) [note that around 95% of buildings in Los Angeles County are constructed
from timber]. The damage levels observed during the destructive test, for different
displacement levels, and the damage status of the house is discussed in section 2.6.8.
The results show that the damage on the plasterboard wall (W3) is more severe than
for the plywood-braced walls (W1,W2,W4) for a given displacement response. Also,
the damage levels incurred under a real earthquake may be very different in different
parts of the structure, depending on the layout and configuration of the walls. It is
therefore important to examine the results in more detail than the global response
provides, at the sub-system level. In the following section, the response of the
individual walls is examined.

Chapter 2 – Experiment Description and Results
80
2.6.4 Individual Wall Hysteresis Responses
In Figure 2.23, the in-plane hysteresis response of each of the different walls of the
house are shown separately. The out-of-plane contributions of the cross-walls (i.e.
walls W5 to W9) to the North-South direction response are also shown, lumped into a
single sub-system, as they are effectively acting together, and are negligible in
magnitude when plotted separately. The in-plane contributions to the East-West
direction response of walls W6, W7 and W8 are also lumped into a single sub-system,
as they are effectively acting as a single unit in the East-West direction due to the
geometry of the wall layout, and are small in magnitude when considered separately.
Note that the out-of-plane contribution of walls W1 to W4, to the total East-West
response is negligible and is not plotted. In Figure 2.24, the same data is plotted, with
all the plots on the same scale, to give an indication of the relative response of each
different sub-system. The in-plane initial stiffness and capacity characteristics for
each of the wall sub-systems is given in Table 2.7. Stiffness values for the lumped
wall system W678 were estimated using the values from other walls, and the
perforated shear wall method (NAHBRC, 2000), as they could not be reliably
determined from the experimental data, due to the very small in-plane deformation of
wall W678.
Except for the doubly-sided gypsum clad wall W3, the hysteretic characteristics of all
of the walls are quite similar, and exhibit similar behaviour to the global hysteresis
shown in Figure 2.21. Wall W3 is initially stiffer than the other walls, but is more
brittle and loses capacity at a much faster rate during the test. A comparison of the
initial cycles from the hysteresis responses of walls W3 and W4 is given in Figure
2.25. This shows that the onset of inelastic behaviour for wall W3 occurs at around
5mm displacement, compared to around 10mm displacement for wall W4.
Under current practice, the testing and analysis of residential shear-wall structures are
based mainly on the results of isolated wall testing. The results presented here, go a
step further than this, to provide an insight into how the shear-walls behave when they
are part of a whole structure.

Chapter 2 – Experiment Description and Results
81
-120
-80
-40
0
40
80
120
-120 -80 -40 0 40 80 120
Displ (mm)
Load (kN)
Figure 2.21 – Global hysteresis response of whole house in the North-South
direction.
-120
-80
-40
0
40
80
120
-120 -80 -40 0 40 80 120
Displ (mm)
Load (kN)
Figure 2.22 – Backbone of global hysteresis response of whole house in the North-South direction.

Chapter 2 – Experiment Description and Results
82
Load (kN)
-10
-5
0
5
10
-80 -40 0 40 80-40
-20
0
20
40
-80 -40 0 40 80
-50
-25
0
25
50
-120 -80 -40 0 40 80 120-50
-25
0
25
50
-120 -80 -40 0 40 80 120
-20
-10
0
10
20
-120 -80 -40 0 40 80 120-20
-10
0
10
20
-20 -10 0 10 20
-6-4-2024
-20 -10 0 10 20-20
-10
0
10
20
-20 -10 0 10 20 Displacement (mm)
Figure 2.23 – Hysteresis response of wall systems in North-South and East-West
directions.
W1 N-S
W3 N-S W4 N-S
W2 N-S
W5-9 N-S out-of-plane
W5 E-W
W6-8 E-W W9 E-W

Chapter 2 – Experiment Description and Results
83
Load (kN)
-50
-25
0
25
50
-120 -80 -40 0 40 80 120-50
-25
0
25
50
-120 -80 -40 0 40 80 120
-50
-25
0
25
50
-120 -80 -40 0 40 80 120-50
-25
0
25
50
-120 -80 -40 0 40 80 120
-50
-25
0
25
50
-120 -80 -40 0 40 80 120-50
-25
0
25
50
-120 -80 -40 0 40 80 120
-50
-25
0
25
50
-120 -80 -40 0 40 80 120-50
-25
0
25
50
-120 -80 -40 0 40 80 120 Displacement (mm)
Figure 2.24 – Hysteresis response of wall systems in North-South and East-West
directions, plotted on same scale.
W1 N-S
W3 N-S W4 N-S
W2 N-S
W5-9 N-S out-of-plane
W5 E-W
W6-8 E-W W9 E-W

Chapter 2 – Experiment Description and Results
84
-50
-25
0
25
50
-20 -10 0 10 20Displ (mm)
Load (kN)
W3
-50
-25
0
25
50
-20 -10 0 10 20Displ (mm)
Load (kN)
W4
Figure 2.25 – Comparison of wall W3 and W4 hysteresis responses for initial load cycles of destructive test.

Chapter 2 – Experiment Description and Results
85
One of the big problems in isolated wall testing, is defining the boundary conditions,
especially the amount of uplift restraint to provide, so as to simulate the restraint
conditions provided by the surrounding structure, in a real house. The type and level
of uplift restraint used in an isolated test can dramatically affect the load and
displacement capacity which is determined. In the future it is planned to test the main
shear-wall walls in the house as isolated walls, and then compare the isolated wall and
the whole system responses. The individual wall response data obtained from the
whole-house and isolated wall testing can then be used to refine existing isolated wall
testing techniques. This is beyond the scope of the current work. In this work, in
Chapter 5, the global and sub-system experimental data presented here is used in the
development and validation of lumped-mass and shear-wall models for prediction of
global and sub-system responses in light-frame buildings under earthquake loading.
Table 2.7 – Initial in-plane stiffness and capacity characteristics of whole house, and separate wall systems.
Structural system and Orientation House W1* W2* W3 W4 W5* W6-8* W9*
Characteristic
N-S N-S N-S N-S N-S E-W E-W E-W
Initial Tangent Stiffness
(kN/mm) 36 0.67 4 21 9 12 12# 16
Stiffness at 1.0mm displacement
(kN/mm) 22.5 0.55 3.5 11.5 6 8 9# 11
Maximum Load
(kN) 100 12* 30* 33 50 14* 5* 18*
Displacement at Maximum Load
(mm) 32 58* 62* 10 35 18* 4* 11*
Maximum Displacement
(mm) 105 58* 62* 116 117 18* 4* 11*
Load at Maximum Displacement
(kN) 70 12* 30* 14.5 15.4 14* 5* 18*
* Maximum capacity may not have been reached # Estimated value

Chapter 2 – Experiment Description and Results
86
Table 2.8 – Results summary for selected displacement cycles of destructive test.
Applied Displ. (mm)
Measurement W1 W2 W3 W4 W5 W678 W9
in-plane displacement (mm) 2.75 2.86 6.51 7.31 0.81 - 0.68
X reaction (kN): sum = 74.3 1.50 7.84 32.78 28.97 0.31 1.06 1.84
Y reaction:(kN): sum = -1.0 0.36 0.01 0.01 -0.11 -4.96 -0.49 4.20 10
Uplift:max (kN) 2.03 3.16 3.11 7.16 3.54 1.15 0.13
in-plane displacement (mm) 6.33 6.69 16.25 16.07 2.01 - 1.50
X reaction (kN): sum = 101.4 2.76 13.54 35.52 42.70 0.43 1.92 4.59
Y reaction:(kN): sum = -1.5 0.49 -0.04 0.07 0.01 -8.23 -1.07 7.27 20
Uplift:max (kN) 4.10 5.44 4.16 9.24 4.94 1.88 0.37
in-plane displacement (mm) 14.82 16.10 36.55 35.49 4.53 - 3.25
X reaction (kN): sum = 112.8 4.98 20.20 26.63 51.29 0.85 2.46 6.39
Y reaction:(kN): sum = -2.2 0.70 -0.02 -0.09 -0.35 -12.11 -1.68 11.33 40
Uplift:max (kN) 7.04 9.16 3.52 12.56 7.03 3.57 1.23
in-plane displacement (mm) 24.70 27.25 57.00 55.66 7.01 - 5.22
X reaction (kN): sum = 102.6 6.29 23.83 19.16 42.70 0.79 2.77 7.10
Y reaction:(kN): sum = -2.7 0.88 0.17 0.02 -0.49 -14.30 -2.56 13.61 60
Uplift:max (kN) 8.04 9.37 2.98 10.98 8.25 5.32 2.14
in-plane displacement (mm) 32.09 36.20 71.63 69.96 8.97 - 6.76
X reaction (kN): sum = 91.6 6.74 26.20 17.56 34.55 0.74 2.67 3.14
Y reaction:(kN): sum = -2.9 0.90 0.17 0.02 -0.42 -15.68 -2.94 15.10 80
Uplift:max (kN) 7.44 9.95 2.82 9.55 9.05 6.38 2.89
in-plane displacement (mm) 56.43 62.15 115.00 113.15 15.00 - 11.46
X reaction (kN): sum = 81.2 7.90 30.26 13.86 21.47 0.87 2.61 4.23
Y reaction:(kN): sum = -3.44 0.97 0.02 -0.39 -0.49 -18.24 -2.76 17.46 120
Uplift:max (kN) 6.86 8.40 2.58 6.66 10.73 6.68 3.89

Chapter 2 – Experiment Description and Results
87
2.6.5 Ceiling Diaphragm Hysteresis Responses
It is evident from the hysteresis plots of the individual walls in Figure 2.23. that the
displacements of the non-loaded walls W1 and W2 are generally around half of the
value for the loaded walls, W3 and W4. The displacement difference is due to two
factors: 1) the rigid-body rotation of the house under the applied loading; and 2) the
in-plane shear distortion (or racking) of the roof and ceiling diaphragm. The rigid-
body rotations and racking type distortions of the roof and ceiling diaphragm, at
different stages during the destructive test are shown diagrammatically in Figure 2.26.
Only the main section of the roof covering walls W2, W3 and W4 is shown.
Because the displacements of the roof system relative to the laboratory strong-floor
were measured at the corners of the house during the test, the rigid-body rotation and
the racking displacements of the roof and ceiling diaphragm can be separated, and an
approximate hysteresis behaviour for the roof system can be derived. The
approximate in-plane racking hysteresis of the roof and ceiling system is given in
Figure 2.27. The data on the displacement axis of Figure 2.27 was derived by
calculating the in-plane shear distortion, in the North-South direction, of the main
section of the roof and ceiling diaphragm, between walls W2 and W4. The values
were derived from the roof-mounted displacement gauges. Note that only the section
of roof covering walls W2, W3 and W4 was considered, and that some of the
displacements required for the calculations were estimated from other nearby gauges.
The data on the load axis is the measured restoring force under wall W2. This can be
assumed to be the approximate ‘load’ if the roof and ceiling diaphragm is assumed to
be the main path for transferring the applied loads from the Eastern (i.e. loaded) side
of the house, over to the western (i.e. non-loaded) side of the house. The only other
path by which load can be distributed to walls W1 and W2 is via the cross walls, and
it is shown in Figure 2.23, that the cross-wall responses are small compared with the
walls in-line with the loading. So if the contribution of the cross-walls to the load-
sharing is ignored, then the only path for the applied load to be distributed to wall W2
is the roof system, and as such the reaction under wall W2 can be considered as the
approximate in-plane shear reaction force for the roof and ceiling diaphragm over
walls W2, W3 and W4.

Chapter 2 – Experiment Description and Results
88
The hysteresis plot in Figure 2.27 indicates that this main section the roof and ceiling
diaphragm is flexible, but is relatively rigid compared to the walls, since the
maximum shear distortion is only around 10-15mm, whereas the maximum
displacement of wall W2 is around 60mm. Figure 2.27 also indicates slight inelastic
behaviour of the roof system under the applied loading. This is consistent with the
damage observations outlined in section 2.6.8, which indicated that there were signs
of very slight working of the fasteners holding the plywood and gypsum on to the roof
trusses on the Eastern side of the house.
2.6.6 Displaced Shapes
The displaced shapes of the house, at various stages during the test, are shown in
Figure 2.28. The undeformed edges are also shown for reference. Only the perimeter
walls are shown, and the roof has been removed for clarity. These plots are snapshots
of the displaced shape, taken at the time of peak displacement on selected cycles of
displacement in the ‘push’ direction. Note that the displacements of walls W3 and
W4 are equal, since the actuators are attached to these two walls and are operated in
displacement control mode. It should also be noted that wall W3 is not structurally
connected to the roof and ceiling diaphragm, so the displaced shape shown
corresponds to the displacements at the top plate level of the walls, and not the
displaced shape of the ceiling and roof diaphragm.
It is clear from Figure 2.28 that the major component of the displacement is in the
direction of the loading. Very little transverse or vertical displacement is apparent. At
the maximum applied displacement of 120mm, the maximum displacement transverse
to the loading direction is 19mm, which is 16% of the in-line displacement. The
maximum vertical displacement, due to stud uplift is around 10mm, which is 8% of
the in-line displacement.

Chapter 2 – Experiment Description and Results
89
2.6.7 Load Distribution
The distribution of the reaction forces underneath the bottom plate of all the walls in
the house, at various stages during the test, for the X, Y and Z directions are shown in
Figures 2.29, 2.30 and 2.31, respectively. Actual values of the reactions at each load
cell are given on the figures as well. These diagrams are graphical snapshots of the
reaction force data, taken at the time of peak displacement in the ‘push’ direction, and
correspond to the same points in the test as the displaced shapes in Figure 2.28. A
summary of the individual wall displacements and the reaction forces, for the same
selected cycles of displacement, is given in Table 2.8, and a summary of all reaction
and displacement data, over the entire destructive test, is given in Appendix B.
Figure 2.29 shows that as the applied load on walls W3 and W4 is increased, it is
increasingly resisted by walls W1 and W2 in the X direction (in-plane), even though
there is no directly applied load on these walls. Figure 2.31 shows a similar behaviour
for the Z-direction reactions. Figure 2.29 also shows that the X-direction load in the
cross walls are very small compared to the in-plane loads. This implies that the load
is transferred into these walls mainly via the roof system. This load-sharing becomes
more pronounced as the applied displacement is increased, and the load-carrying
capacity of walls W3 and W4 is reduced as they are loaded into the inelastic range.
Figures 2.29 and 2.31 show that the distribution of the loads throughout the structure
change significantly during the experiment. In Figure 2.30 the torsional nature of the
response is indicated by the presence of in-plane loads in the end walls. The
magnitudes of these loads are relatively small but are certainly not negligible.
In Figure 2.32, the percentage of the total in-plane load, which is taken by each wall
sub-system at the maximum point in the loading cycle, is plotted for both the ‘push’
and ‘pull’ directions. Here it is highlighted that the distribution of the load throughout
the structure, changes significantly during the experiment, the amount of load resisted
by each sub-system depending on the level of applied displacement. Initially the
stiffest wall (W3) resists the majority of the load, but as the displacement increases
and its response becomes inelastic, the more ductile wall W4 takes over. Walls W1,
W2 and the cross walls also take more load as the applied displacement is increased.

Chapter 2 – Experiment Description and Results
90
It should be highlighted that wall W3 is not directly connected to the roof and ceiling
diaphragm, and was loaded such that it would have the same displacement as wall W4
in the destructive experiment. Because of this, no conclusions can be made about the
load-sharing and redistribution between wall W4 and the internal wall W3.
In Figure 2.33, the percentage of in-plane load which is taken by the out-of-plane
walls is plotted as a function of the applied displacement level. Initially, only 4% of
the total load is taken by the cross-walls, but this increases to a maximum of 12% for
very large displacements.
In Figure 2.34, the maximum uplift force, which is measured under each wall sub-
system is plotted for both the ‘push’ and ‘pull’ directions. Here it is highlighted that
the maximum wall uplift forces throughout the structure also change during the
experiment depending on the level of applied displacement. The re-distribution of the
vertical forces follows a similar trend to the in-plane forces, whereby the forces are
increasingly transferred to the non-loaded walls (W1 and W2) as the loaded walls
(W3 and W4) lose capacity. This is primarily because the vertical reactions result
from the in-plane actions, and are hence dependent on the same lateral load-sharing
mechanisms.
2.6.8 Damage Status
The damage status of the various parts of the house at different levels of displacement,
are presented in Table 2.9. Damage levels are described as either minor, moderate or
severe, and these levels are used as the damage indicators in the analytical modelling
in Chapter 5. The damage status of the different structural sub-systems in the house,
after the final load cycle, is presented in Table 2.10. Photographs of the damage
incurred, at the end of the test, are shown in Figure 2.35. The damage to walls W3
and W4 was quite severe, with the gypsum board sustaining most of the damage. It
should be noted that the apparent damage for a finished house, with trims, and door
and window frames may be more severe for a given displacement, although the
capacity and stiffness may be significantly increased.

Chapter 2 – Experiment Description and Results
91
10mm120mm 100 80 60 40 20
W2 Reaction Force
W4
W9
W5E
W
SN
E
W
SN
Applied Load
Figure 2.26 – Diagram showing rigid-body rotation, and racking distortion of section of roof and ceiling diaphragm over W2, W3 and W4, for selected displacement levels.
-40
-30
-20
-10
0
10
20
30
40
-15 -10 -5 0 5 10 15
Displ (mm)
Load (kN)
Figure 2.27 – Approximate hysteretic behaviour of roof and ceiling diaphragm over
walls W2, W3 and W4.

Chapter 2 – Experiment Description and Results
92
10mm
20mm
40mm
Figure 2.28 – Displaced shape of house perimeter and undeformed edge at different stages of destructive test (loading as shown in diagram at bottom).

Chapter 2 – Experiment Description and Results
93
60mm
80mm
120mm
Figure 2.28 (cont’d) – Displaced shape of house perimeter and undeformed edge at different stages of destructive test (loading as shown in diagram at bottom).

Chapter 2 – Experiment Description and Results
94
0.20.6
0.50.20.10.1
0.0
0.2
1.0
0.0
0.0
1.0
1.31.4
1.71.90.40.1
0.0
0.00.0
0.2
2.1
2.82.0
2.4
3.12.5
2.32.2
2.8
3.63.2
3.9
0.6
0.3
0.02.7
3.62.5
3.83.03.0
3.12.2
2.62.4
0.4
0.5
0.0
0.1
10mm
0.3
1.7
1.60.30.1
0.10.1
0.5
3.7
0.0
0.0
2.7
3.4
3.53.3
3.5
1.10.3
0.1
0.10.0
0.4
2.2
2.71.9
2.4
2.82.1
2.12.0
2.4
3.12.6
3.41.8
0.5
0.0
4.5
5.44.3
6.35.14.6
6.64.2
4.43.4
0.10.0
0.4
0.01.3
0.0
0.2
20mm
0.3
1.7
1.60.30.1
0.10.1
0.5
3.7
0.0
0.0
2.7
3.4
3.53.3
3.5
1.10.3
0.1
0.10.0
0.4
2.2
2.71.9
2.4
2.82.1
2.12.0
2.4
3.12.6
3.41.8
0.5
0.0
4.5
5.44.3
6.35.14.6
6.64.2
4.43.4
0.10.0
0.4
0.01.3
0.0
0.2
40mm
Figure 2.29 – Distribution and magnitude of X-direction reaction forces (kN) at different stages of destructive test.
Y
X Z

Chapter 2 – Experiment Description and Results
95
0.6
2.6
2.7
0.50.2
0.1
0.5
3.6
0.00.1
0.1 0.0
4.0
4.2
4.64.2
4.8
1.40.6
0.00.3
0.5
1.71.3
1.3
1.71.60.7
1.51.3
1.4
2.21.7
2.7 1.8
0.6
0.0
3.1
4.43.3
5.34.33.5
7.4
4.6
3.73.1
1.0
0.5
0.21.2
0.1
0.4
60mm
0.6
2.9
2.7
0.50.3
0.1
0.2
0.9
0.00.1
0.1 0.0
4.3
4.6
4.94.6
5.4
1.60.8
0.0
0.4
0.4
1.71.2
1.2
1.71.40.4
1.51.2
1.4
2.11.6
2.30.6
0.52.5
3.62.3
4.13.22.5
6.5
3.8
3.42.7
1.3
0.5
0.21.1
0.3
0.4
80mm
0.9
3.4
2.9
0.70.4
0.10.0
0.1
1.0
0.20.1
0.15.3
5.1
5.55.2
6.3
1.71.1
0.8
0.4
1.20.7
0.6
1.30.9
0.3
1.40.7
1.2
1.91.4
2.20.3
0.5
0.00.1 1.2
2.40.8
2.51.51.6
5.22.9
2.01.32.4
0.30.41.0
0.3
0.6
120mm
Figure 2.29 (cont’d) – Distribution and magnitude of X-direction reaction forces (kN) at different stages of destructive test.

Chapter 2 – Experiment Description and Results
96
0.1-0.0
0.00.20.8
0.9 -0.0-0.0
0.7
1.0
0.30.4
0.5 0.0
0.1-0.1
-0.0-0.0
0.0
0.00.0
-0.1-0.3 -0.8
-0.6
-0.3-0.1
0.1-0.1
0.00.0
0.0-0.0
-0.0-0.0
0.1-0.1
0.0-0.1
-0.4-0.3
-0.3-0.4
0.2-0.0
-0.0-0.0
0.0
-0.1
0.2
-0.1
0.20.40.4
-0.4-0.3
-0.0
-0.8-0.5
-1.5
10mm
0.2-0.1
0.00.30.8
1.3 -0.0
0.4
0.9
1.5
0.1
0.80.8 -0.0
0.1-0.2
0.0-0.1
0.10.10.0
-0.4 -0.7 -1.2
-0.9
-0.6-0.0
0.2-0.1
0.00.0
0.0-0.0
-0.0
0.00.1
-0.1
0.0
0.4
-0.6-0.3
-0.4
-0.7
0.3-0.1
-0.0
0.10.1
-0.1
0.4
-0.2
0.41.0
1.0
-0.6-0.6
-0.3
-1.3-1.2
-1.9
20mm
0.3-0.1
0.10.50.8
1.5-0.0
1.01.0
2.0
0.4
0.80.9
-0.1
0.2-0.2
0.0-0.2
0.0
0.10.0
-0.9 -1.5-1.8
-1.2
-0.7-0.0
0.1-0.1
0.00.0
-0.0-0.0
0.10.0
0.1-0.1
-0.2
1.0
-0.4-0.5
-0.7
-1.3
0.4-0.2
0.0-0.1
0.3-0.2
0.6
-0.3
0.4
1.92.0
-0.6
-0.8-0.7
-1.8-1.9
-2.4
40mm
Figure 2.30 – Distribution and magnitude of Y-direction reaction forces (kN) at different stages of destructive test.
Y
X Z

Chapter 2 – Experiment Description and Results
97
0.3-0.2
0.10.61.1
1.7-0.0
1.41.1
2.4
0.50.7
1.0-0.1
0.4-0.1
-0.0-0.3
-0.0
0.1-0.0
-1.3 -2.0-2.0
-1.2-0.9
0.00.1
-0.1
0.1-0.1
-0.0-0.0
0.10.1
0.0-0.1
-0.1
1.2
-0.6-0.7
-0.9
-1.4
0.4-0.1
0.0-0.2
0.3-0.3
0.6
-0.3
0.4
2.42.3
-0.6
-0.9-0.9
-2.0-2.2
-2.7
60mm
0.3-0.2
0.10.71.3
1.8-0.0
1.71.4
2.6
0.60.5
1.0-0.2
0.40.0
-0.0-0.3
-0.0
0.1-0.0
-1.5 -2.3-2.3
-1.2-1.4
-0.00.1
-0.1
0.1-0.0
-0.1-0.0
0.20.1
0.0-0.1
-0.1
1.4
-0.7
-0.8-0.9
-1.1
0.3-0.1
-0.0-0.2
0.3-0.3
0.5
-0.3
0.5
2.62.4
-0.5
-0.9-1.1
-1.8
-2.4
-2.9
80mm
0.2-0.2
0.1
0.81.7
2.1
-0.0
2.11.7
2.9
0.6
1.01.5
-0.2
0.00.2
0.1-0.5
0.1
0.10.1
-1.8 -2.8-2.6
-1.3 -1.8
0.10.1
-0.1
0.1-0.0
-0.3
-0.1
0.10.1
0.0-0.1
-0.2
1.6
-1.0
-1.3-1.2
-1.6
0.2-0.0
-0.0
0.10.0
0.2
0.4
-0.2
0.4
2.82.6
-0.3
-0.7
-1.4
-2.1
-2.8
-3.1
120mm
Figure 2.30 (cont’d) – Distribution and magnitude of Y-direction reaction forces (kN) at different stages of destructive test.

Chapter 2 – Experiment Description and Results
98
-0.4
2.5
-2.0
1.32.1 0.8
0.3-0.1
0.1
1.5
-1.0
-0.30.7 0.3
-3.2
1.20.2
-0.0
3.0-1.3
0.2
-2.5
-1.3-0.9
-0.3 -1.5-3.1-3.0
-0.6
3.1
5.2
-2.3
-2.0
-0.9
-0.6
0.9
2.5
3.6 1.3
-1.1-0.5
-0.6
-4.5
4.92.9-2.0
-2.7
7.8
-4.8
7.9
-7.2
2.22.62.5
-1.1-1.1
-1.0
-3.5-2.3-2.4
10mm
-1.7
4.7
-4.1
2.74.0 1.3
0.6-0.2
-0.4
1.4
-1.4-0.8
1.3 0.7
-5.4
2.10.5-0.0
5.1
-2.5
0.6
-4.9
-2.1
-1.3
0.0 -1.4-3.8
-4.2
-0.7
3.8
6.4
-2.9
-2.2
-0.9
-0.8
1.0
2.8
4.1 1.8
-1.0-0.7
-0.7
-7.7
8.95.7
-3.5-6.1
12.7
-8.7
13.5
-9.2
2.23.5
3.7
-1.8-1.9
-1.1
-4.9-4.0
-3.3
20mm
-3.5
9.0
-7.0
4.96.7
2.1 1.0 -0.6-1.2
1.0
-3.6
-1.4
2.4 1.3
-9.2
3.80.6-0.0
7.6
-4.2
1.3
-7.0
-3.5
-1.9
1.0 -0.4-1.8-3.5
-0.4
2.7
4.2
-3.2
-1.6
-0.9-1.2
1.1
2.4
3.0 2.2
-0.4-0.7
-0.9
-10.2
14.8
7.4
-6.6-10.3
17.9
-12.6
19.4
-6.9
-0.6
3.34.4
-2.7-2.6-0.9
-5.3-5.4-4.5
40mm
Figure 2.31 – Distribution and magnitude of Z-direction reaction forces (kN) at different stages of destructive test.
Y
X Z

Chapter 2 – Experiment Description and Results
99
-5.1
12.6
-8.0
6.2
8.4
2.3 1.0 -1.2-2.1
0.4
-5.3
-2.0
2.9 1.6
-9.4
4.60.3
-0.0
9.0
-5.5
2.1
-8.3
-5.6
-2.9
2.1 0.6-1.5-3.0
-0.3
2.0
3.1-1.8
-0.9
-0.9-1.4
0.8
1.81.5
2.7
0.2
-0.9-1.2
-6.0
16.2
5.3
-5.9-9.9
14.4
-11.0
19.5
-5.0
-1.1
1.54.5
-3.5-3.4-0.9
-4.3
-5.6-4.8
60mm
-6.2
14.6
-7.4
6.8
8.8
2.0 1.0 -1.6 -2.9
0.9
-6.4
-2.2
3.0 1.9
-9.9
4.70.4
-0.0
9.7
-6.3
2.7
-9.1
-6.6
-3.5
3.4 1.0-1.2-2.8
-0.8
1.9
3.1-1.0
-0.1-0.8
-1.6
0.5
1.3-0.4
3.0
0.7
-0.8-1.4 0.5
12.3
1.8
-4.1-8.6
12.7
-9.5
17.1
-4.1
-1.50.6
4.5
-3.5-3.4-0.5
-2.7
-5.8-5.5
80mm
-4.9
16.5
-6.9
8.69.3
1.31.1
-2.1 -3.9
-0.2
-6.7
-5.6
1.52.1
-8.4
4.4-0.0
-0.0
10.2
-5.5
3.7
-10.7
-9.7
-5.0
6.1
1.4-1.0-2.6
-0.9
1.0
2.3-1.1
0.3-1.8-2.4
0.1
2.2-0.1
3.8
2.7
-0.8
-2.2
7.7
10.2
0.1-0.8-3.8
4.5
-6.7
13.4
-2.8
-2.2-1.5
4.1
-3.1-2.40.3
-2.3
-6.7-6.0
120mm
Figure 2.31 (cont’d) – Distribution and magnitude of Z-direction reaction forces (kN) at different stages of destructive test.

Chapter 2 – Experiment Description and Results
100
0%
10%
20%
30%
40%
50%
60%
0 20 40 60 80 100 120
Applied Displacement (mm)
% o
f X R
eact
ion
W1 W2 W3 W4 X-Walls
(a) Push direction
0%
10%
20%
30%
40%
50%
60%
0 20 40 60 80 100 120
Applied Displacement (mm)
% o
f X R
eact
ion
W1 W2 W3 W4 X-Walls
(b) Pull direction
Figure 2.32 – Percentage of X-direction reaction taken by each wall sub-system during destructive test.

Chapter 2 – Experiment Description and Results
101
0%
4%
8%
12%
16%
0 20 40 60 80 100 120
Applied Displacement (mm)
% o
f X
Rea
ctio
n in
Cro
ss-W
alls
push direction
pull direction
Figure 2.33 – Percentage of X-direction reaction taken by cross-walls during destructive test.

Chapter 2 – Experiment Description and Results
102
0
2
4
6
8
10
12
14
0 20 40 60 80 100 120
Applied Dsiplacement (mm)
Max
imum
Upl
ift F
orce
(kN)
W1 W2 W3 W4 W5 W678 W9
(a) Push direction
0
2
4
6
8
10
12
14
0 20 40 60 80 100 120
Applied Dsiplacement (mm)
Max
imum
Upl
ift F
orce
(kN)
W1 W2 W3 W4 W5 W678 W9
(b) Pull direction
Figure 2.34 – Maximum uplift force in each wall during destructive test.

Chapter 2 – Experiment Description and Results
103
Table 2.9 – Damage observations at different stages during the destructive test.
Displacement Damage Observations
5 mm First significant inelastic behaviour on plasterboard wall
No visible signs of fastener or sheathing damage
10 mm First significant inelastic behaviour on plywood braced walls
First visible signs of plasterboard cracking around corners of openings
Peak load for plasterboard wall
20 mm Minor cracking of plasterboard at corners of openings
First visible signs of plasterboard screw tearing and pulling
35 mm Moderate plasterboard cracking at corners of openings
First visible signs of plywood nail tearing and pulling
Peak load for plywood braced walls
50 mm Moderate to Severe plasterboard cracking at corners of openings
Moderate tear-out and pull-through of plasterboard screws
Minor tear-out and pull-through of corner nails on plywood bracing panels
Minor separation of sheathing materials from frame
Minor stud bending and uplift
75 mm Severe plasterboard cracking at corners of openings
Severe tear-out and pull-through of plasterboard screws
Moderate tear-out and pull-through of corner nails on plywood bracing
panels
Moderate separation of sheathing materials from frame
Moderate stud bending and uplift
+100 mm Severe cracking of plasterboard
Severe pull-through and tear-out of plasterboard screws
Severe tear-out of corner nails on plywood bracing panels
Severe separation of all sheathing materials from frames
Severe stud bending and uplift

Chapter 2 – Experiment Description and Results
104
Table 2.10 – Structural damage status of structural sub-systems after final load cycle of destructive test
System Damage Status after final load cycle
W1 Moderate cracking of gypsum board at corners of opening; no visible damage to
plywood sheathing; still holding maximum load.
W2 Severe cracking of gypsum around openings; some splitting of plywood sheathing
and nail tear-out at corners; slight separation of plywood sheathing from studs; still
holding near to maximum load
W3 Severely damaged gypsum both sides especially at intersections with cross and
end walls; complete loss of capacity with large sections of gypsum board
completely separated from studs with screws pulled through the gypsum and/or
broken; moderate cracking of gypsum around the door opening; visible studs are
noticeably bent under large loadings; wall has broken through the end-walls at
both ends; capacity reduced to less than 50% of maximum.
W4 Severe damage to gypsum around all openings, some pull-through of gypsum
screws and separation of gypsum from studs; severe tear-out and withdrawal of
plywood nails, many plywood sheets completely separated from studs; severe
stud uplift and bending at wall-ends and openings; capacity reduced to 50% of
maximum.
W5 Wall W3 has broken through W5 at the intersection of the two walls, and the studs
have separated at this location, otherwise intact with very minor signs of damage
at perimeter fastener locations.
W6 Intact and apparently undamaged.
W7 Intact and apparently undamaged.
W8 Small section of wall has distorted severely due to movement of wall W3.
W9 Wall W3 has broken through W9 at the intersection of these two walls, and the
studs have separated at this location, otherwise intact with very minor signs of
damage at perimeter fastener locations.
Roof &
Ceiling
Some perimeter screws on ceiling gypsum board showing slight signs of wear and
pull-through, damage to gypsum limited to sections near loading points, otherwise
completely intact; nails for plywood roof sheathing show minor signs of tilting and
withdrawal on roof above wall W4 although plywood sheets generally undamaged
and intact; some minor nail withdrawal on truss clips (i.e. plate connectors
between roof trusses and top plate), and some permanent deformation of truss
clips; roof trusses appear undamaged and intact, roof system as a whole still
transferring load from W3 & W4 to W2 & W1 at maximum capacity.

Chapter 2 – Experiment Description and Results
105
Stud uplift in W4 door opening
Severe crack in W4 window opening
Almost undamaged truss-clips above W2
Moderate cracking on gypsum board, W1 garage door opening
Wide view of damage on W2
Severe cracking of gypsum board in W2 window opening
Figure 2.35 – Photos of damaged house after destructive test.

Chapter 2 – Experiment Description and Results
106
Nail distortion on roof sheathing
Gypsum board broken separated from studs at north end of W3
Broken studs at North end of W3 have pushed through W5
Gypsum board broken separated from studs at south end of W3
Figure 2.35 (cont’d) – Photos of damaged house after destructive test.

Chapter 2 – Experiment Description and Results
107
Separation of Plywood and gypsum from W4
Severe distortion of studs on W4 door opening
Figure 2.35 (cont’d) – Photos of damaged house after destructive test.
2.6.9 Comments on Experiment
The experiments and results described herein are based on an unfinished house, which
consisted of the structural elements only, and the gypsum board lining. An
unfinished house was chosen as the basis for the experiments, because the main aims
of the work were to examine load-sharing between the structural elements, and to
collect data for validation of analytical models, which do not consider any non-
structural elements. Also, there is a large variability in the type, robustness and
durability of the non-structural components which could be used, and their presence
may introduce too many unknowns into the experiments, making it difficult to
interpret the data and draw meaningful conclusions. The limitation of this approach is
that the inclusion of the non-structural elements in the experiment (i.e., tapes in the
corners of the interior panel materials, cornices or similar ‘non-structural’ links
between roof and wall panels, windows, doors, exterior wall finish) may alter the load
paths at small displacements. For example, taping and plastering of the joint between

Chapter 2 – Experiment Description and Results
108
wall W3 and the ceiling diaphragm may establish a more rigid connection between the
roof and ceiling diaphragm and the wall, which will then become more prominent in
resisting applied lateral loads. The presence of the non-structural finishes may also
increase the strength and stiffness of the house, and also increase the apparent damage
status. This could be addressed by testing a finished house to compare and enhance
the results presented here, and so that the results could be compared against field
observations of damage on similar houses in past earthquakes . It would also be
desirable to conduct similar experiments on light-frame houses with a range of
different configurations than the house described herein, to provide additional data for
model validation.
Another limitation stems from the loading regime used in the destructive experiment.
This limitation applies to almost all structural testing, in that the interaction between
the applied load in the laboratory and the specimen, may not accurately represent the
‘real’ in-service load-structure interaction. In the destructive test, identical
displacements were applied at the top plate of walls W3 and W4, to ensure that all
structural sub-systems and load-sharing mechanisms were engaged. This meant that
no conclusions could be made about the load-sharing and redistribution between wall
W4 and the internal wall W3. This also restricted the structure from rotating in the
area between the two load points and hence induced some unrealistic local stresses on
wall W5.
2.7 Conclusions
This chapter has presented a review of the general behaviour of light-frame systems,
and full-scale testing of light-frame structures. The results of structural testing
conducted on a full-scale L-shaped timber-frame house are summarised and
presented. Three series of tests were conducted:
• elastic testing under a variety of small point loads
• vibration-based dynamic impact testing
• destructive testing under reverse static-cyclic lateral loading

Chapter 2 – Experiment Description and Results
109
Data gathered from the experiments is to be used in validating different types of
numerical models which represent the structural behaviour of the house. These
include a FE model (not in this Thesis), and hysteretic shear-wall, SDOF and shear-
building models (see Chapter 5).
On the basis of the experimental results presented in this chapter, the following
conclusions can be drawn.
2.7.1 Elastic Testing
Small point loads, less than 10 kN, were applied to the walls of the house at the
ceiling level, in different configurations, and the displaced shape and the distribution
of the reaction forces under elastic response was measured in detail.
• Significant load-sharing occurs between the external shear-resisting walls in
the house under elastic response conditions. When a concentrated load is
applied to a single wall, the load is distributed to the non-loaded external walls
mainly through the roof and ceiling diaphragm. Between 19% and 78% of the
applied load can be shared by the rest of the structure, depending on the
location of the wall in the structure, the connection to the roof and ceiling
diaphragm and the relative stiffness of the loaded wall compared to the
surrounding structure.
• The amount of load-sharing observed in the elastic experiments, is a lower
bound estimate, since not all of the structural sub-systems are engaged at small
displacement levels. The load-sharing and redistribution increases once the
house is pushed into the inelastic range.
• A uniform displacement field was applied to all four North-South walls (i.e.
walls W1 to W4) until the applied load reached 90% of a hurricane level
design wind load. Under this loading, the response of the structure was
essentially elastic with no damage observed. The results of this test indicated

Chapter 2 – Experiment Description and Results
110
that the type of house tested should easily withstand this design wind load
with minimal or no structural damage. It is important to highlight that this
conclusion is based purely on the lateral wind load to the walls and does not
consider uplift pressure on the roof.
2.7.2 Dynamic Impact Testing
The natural racking-mode frequencies of the house in the North-South and East-West
directions were obtained by measuring the acceleration response from dynamic
impact tests. The experiments were conducted before and after the elastic tests to
check for signs of damage.
• The natural frequencies determined from the dynamic tests in the North-South
direction were 13.6 Hz (T=0.074 sec) before the elastic testing, and 13.3Hz
(T=0.075 sec) after the elastic testing, with a slightly wider spectral peak
observed in the latter tests. This indicated that a slight change had occurred in
the dynamic characteristics, inferring that some slight damage had resulted
from the elastic testing. However, the change is only very small, and could be
within the error bound of the experiment.
• The natural frequency in the East-West direction was 14.8 Hz (T=0.068 sec)
measured before elastic testing
• The calculated natural frequency in the North-South direction, derived using
the stiffness from the initial load-cycles of the destructive testing, and the
measured mass of the structure is 13.3 Hz, which is in agreement with the
value determined from the vibration tests. This indicates that a SDOF model,
with all mass lumped at the ceiling level, may be appropriate for global
response analysis of the test house.
• The natural frequencies calculated using dynamic impact tests must be used
with caution, since the measured vibration frequency, is highly dependent on

Chapter 2 – Experiment Description and Results
111
amplitude of vibration induced in the test, and hence depends on the excitation
level used.
2.7.3 Destructive Testing
Identical static-cyclic displacements of up to +/-120mm were applied at the ceiling
level, on one side of the house, in the North-South direction. The displaced shape and
the distribution of reaction forces throughout the structure under the inelastic response
were measured, and the following observations were made:
• The global hysteresis response of the house was characterised by ductile
behaviour, ‘pinching’ at the origin, and degradation of the strength and
stiffness under cyclic loading. The hysteresis characteristics of the individual
walls were similar to each other, and to the global response, except for the
internal wall W3, which was more brittle.
• The roof and ceiling diaphragm in the house provided a robust load-
distribution path from the loaded to the non-loaded walls which are
structurally connected to the diaphragm. It behaved as a flexible diaphragm
under the applied loading, but was relatively rigid compared to the walls.
• The load-displacement relationship of the whole house, and of the individual
components was non-linear from the origin. The initial stiffness of the whole
house, measured at a displacement of 0.2mm, was 36 kN/mm, whereas the
stiffness measured at 1mm displacement was 22.5 kN/mm.
• The total strength capacity of the house, in the direction of loading, was
around 100 kN with maximum capacity being reached at about 30mm
displacement. Beyond the maximum strength capacity, the house resisted 80
kN at 80mm displacement and 70 kN at 110mm displacement, indicating this
type of construction is highly ductile and not prone to sudden collapse.

Chapter 2 – Experiment Description and Results
112
• As the applied load was increased on walls W3 and W4, the percentage of the
load resisted by walls W1 and W2 also increased, even though no load was
applied to these walls. The applied load was re-distributed into these walls
mainly via the roof and ceiling diaphragm. The distribution of the load
throughout the structure, changed significantly during the experiment, with the
amount of load resisted by each sub-system depending on the level of applied
displacement and the structural integrity of the other subsystems. This is due
to the highly ductile nature of the structure.
• For small loads, 4% of the total applied load was taken by the out-of-plane
walls. At peak load, this increased to 9%, and then further to a maximum of
12% beyond the peak load.
2.7.4 Recommendations for Further Research
• In the experiments presented here, all the observations are based on an
unfinished house, which consists of the structural elements only. Inclusion of
the non-structural elements in the experiments may alter the load paths at
small displacements. The presence of the non-structural finishes may also
increase the strength and stiffness of the house, and also increase the apparent
damage status. This could be addressed by testing a finished house to
compare and enhance the results presented here, and so that the results could
be compared against field observations. It would also be desirable to conduct
similar experiments on light-frame houses with a range of different
configurations than the house described herein, to provide additional data for
model validation.
• The results of this experiment give an insight into how the shear-walls behave
when they are part of a whole structure. Since the current practice for shear-
wall design and analysis is based on isolated wall testing, it is recommended to
test the main shear-walls of the test-house as isolated walls, in order to
examine the link between the isolated wall and the whole system responses.

Chapter 2 – Experiment Description and Results
113
• It is also recommend that a three-dimensional FE model be fully validated
against the experimental results presented herein and also for another house
with a very different configuration than the current test house so that the
experimentally validated model can be used to conduct sensitivity studies for a
wide range of practical house configurations. This is needed to provide general
recommendations for lateral force distribution in light-frame buildings.
• Once the FE model has been validated it should be used as a tool in the
development of practical and reasonably accurate design methods and
recommendations for lateral force distribution in light-frame structures.

Chapter 2 – Experiment Description and Results
114

Chapter 3 – Hysteresis Modelling
115
CHAPTER 3
Hysteresis Modelling
3.1 Introduction
As was indicated in the overview of light-frame structural behaviour in Chapter 2,
analytical modelling of the behaviour of light-frame structures under severe cyclic
loading requires an accurate mathematical representation of the force-displacement
relationship of the critical structural components. This chapter addresses the
modelling of the force-displacement relationship, or hysteresis, for light-frame
structures. It begins with a review and discussion on hysteresis modelling and system
identification techniques, which can be used to determine hysteresis model
parameters. Next, a hysteresis model which is suitable for modelling the behaviour of
light-frame structures under seismic loading is described. The model is based on the
Bouc-Wen differential model of hysteresis. The Generalised Reduced Gradient
(GRG) method of system identification is then used to determine the parameters for
the modified Bouc-Wen hysteresis model, for a range of different experimental data
sets, which are taken from the literature. A parallel system identification approach is
outlined and illustrated through two examples. In these examples a single set of
hysteresis model parameters is fitted to two different experimental data sets
simultaneously. The two different data sets are derived from identical test specimens
under different applied loading. Finally, the modified Bouc-Wen hysteresis
parameters are determined for the test house using the experimental results presented
in Chapter 2. The GRG method is used to determine hysteresis parameters for the
whole-building response, and for the individual wall sub-systems. Three different
structural models which incorporate modified Bouc-Wen differential hysteretic
elements are formulated in Chapter 4. The models are used for prediction of global
and individual wall responses in Chapter 5.

Chapter 3 – Hysteresis Modelling
116
3.2 Overview of Hysteresis Modelling
3.2.1 Introduction
Typical hysteresis data obtained from cyclic tests of light-frame structures, as shown
in Figure 2.2, exhibit a non-linear load-displacement relationship with no distinct
yield point, cyclic degradation of strength and stiffness, and pinching about the origin
In addition to this, the behaviour exhibits memory, such that the resisting force
depends not only on the instantaneous displacement, but on the past displacement
history as well (see section 2.2.2).
Since the hysteretic characteristics of the inter- and intra-component connections
govern the global hysteretic behaviour of light-frame structures under cyclic loading
(see section 2.2.2) it is therefore desirable to characterise this behaviour as accurately
as practically possible in any analytical model used for the prediction of structural
behaviour under earthquake loads.
Because of the complex nature of the behaviour, and the difficulties involved in
simulating such behaviour, many simplified hysteresis models have been developed
which ignore some (or even most) of the features observed in experiments. Generally,
it is the very simplistic models which are used in earthquake engineering practice.
Researchers have also developed very complex hysteresis models which attempt to
represent hysteretic behaviour as accurately as possible. These models have been
primarily used for research purposes and are not routinely used for seismic analysis.
Some of the different hysteresis modelling approaches, and the more commonly used
hysteresis models are described and reviewed in the following section.
3.2.2 Phenomenological Hysteresis Models
Countless hysteresis models have been developed for the purposes of structural
analysis. This is mainly because of the many different material and structural
configurations which are used in the built environment, which have had models
developed specifically for them, often with many variations. There are two main types
of hysteresis model: 1) phenomenological; and 2) mechanics-based [e.g. reinforced

Chapter 3 – Hysteresis Modelling
117
concrete fibre models (Fardis, 1991)]. There are far too many models to review
comprehensively in the work herein, and hence, a selection of models, often used for
modelling the behaviour of light-frame structures are reviewed. Most of the available
models are phenomenological, and are discussed in the following. Mechanics-based
models are discussed and compared to phenomenological models in section 3.2.3.
Piece-wise linear (PWL) models of hysteretic behaviour have been developed
primarily for seismic analysis of concrete and steel structures. Some examples of
PWL models are shown in Figure 3.1. The elasto-plastic and bi-linear models, shown
in Figure 3.1 (a) and 3.1 (b) are the simplest approximations to inelastic behaviour,
and have historically been the most widely used approaches in hysteresis modelling,
particularly for concrete and steel structures. The advantage of these approaches is the
simplicity and hence ease of implementation. The limitation, when using these models
to predict the behaviour of light-frame structures, is that they are perhaps too
simplistic to accurately represent the real behaviour – they do not take account of the
cyclic degradation in strength and stiffness and pinching of the hysteresis which is
observed in laboratory experiments.
The effect of including or excluding these experimentally observed phenomena in
predictive structural modelling is disputed. The conclusions of the previous research
undertaken to determine the effect of hysteretic modelling on response prediction are
inconclusive and conflicting (see section 3.2.4). The physical effect of these
phenomena is, however, more intuitive.
The effect of stiffness degradation can significantly alter the dynamic response of a
structure under seismic loading, since any change in stiffness causes a corresponding
shift in the natural frequency of the structure. If the shift in the natural frequency is
towards the dominant frequency in the earthquake excitation, then the structure’s
response can be amplified dramatically due to resonance effects (see section 4.2.1).
Strength degradation can also be physically important, since many structural collapses
are caused by progressive weakening of the structure resulting from the violent load-
reversals experienced under earthquake loading. The presence of pinching in a
structural response can dramatically alter its energy absorption characteristics. The
energy dissipated by a structure is given by the area enclosed by the hysteresis trace,

Chapter 3 – Hysteresis Modelling
118
and hence a pinched hysteresis response, for a given deflection level, will have vastly
different energy absorbing capacity to a non-pinched response. Conversely, the
displacement response for a given energy dissipation, can be quite different for a
pinched and a non-pinched system. This concept is illustrated diagrammatically in
Figure 3.2. Strength and stiffness degradation also have an effect on the shape of the
trace, by causing it to change over time. This in turn affects the energy dissipation
characteristics.
Although the elasto-plastic and bi-linear models, in their simplest form, have no way
of incorporating the important behavioural characteristics observed in the laboratory
and the field (such as cyclic degradation and pinching), many other PWL hysteresis
models have been developed, which address these limitations to varying degrees. The
modified Clough model and the Q-hysteresis model shown in Figure 3.1 (c) and 3.1
(d) incorporate stiffness degradation. The Takeda model and the Slip model shown
in Fig 3.1 (e) and 3.1 (f) incorporate stiffness degradation and pinching effects
commonly observed in reinforced concrete structures.
The PWL model shown in Figure 3.3, was developed by Stewart (1987) for nailed
sheathing to timber connections, and includes pinching and stiffness degradation, as
well as an option to include initial slackness in the first cycle of loading. Many other
PWL models have been developed for the many different connection configurations
used in timber construction. These are reviewed in Foliente (1993).
Sivaselvan and Reinhorn (1999) developed a complex but general PWL hysteresis
model which incorporates strength and stiffness degradation and pinching. It is an
extension of Park’s three parameter model (Park et al., 1987). Models such as this are
much more powerful in their predictive capability and more general in their
application, but are very complex due to the ‘rule-based’ definition of the behaviour.
The complexity is illustrated by the branch numbering convention for the model
which is shown in Figure 3.4.

Chapter 3 – Hysteresis Modelling
119
Figure 3.1 – Examples of piece-wise linear hysteresis models (Loh and Ho, 1990).

Chapter 3 – Hysteresis Modelling
120
Idealised pinched hysteresis
load
displacement
D
Energy = E
elasto-plastic:energy equivalent
D/2Energy = E
elasto-plastic:displacement
equivalent
D
Energy = 2E
FuStiffness = k
k k
Fu Fu
Figure 3.2 – Comparison of idealised pinched hysteretic system with energy equivalent and displacement equivalent elasto-plastic systems.

Chapter 3 – Hysteresis Modelling
121
Figure 3.3 – Model by Stewart (1987).
Figure 3.4 – PWL model from Sivaselvan and Reinhorn (1999).

Chapter 3 – Hysteresis Modelling
122
Another approach to hysteresis modelling is the piece-wise non-linear (PWNL)
approach, where the hysteresis response is defined by a series of non-linear segments.
Dolan’s (1989) hysteresis model for nailed sheathing connections, shown in Figure
3.5, divides the hysteresis trace into four segments, and four boundary conditions,
with each segment described by an exponential equation. Kasal and Xu (1997)
developed a 20 parameter hysteresis model with full pinching degrading functionality,
where the loading and unloading paths are defined by several segments described by
exponential functions. Continuity requirements can be imposed at the transitions
from segment to segment, or released, to model discontinuities. This model is shown
in Figure 3.6.
A more general family of hysteresis models has been developed, and is referred to as
the distributed element (DE) family of models. This type of model was proposed by
Biot (1958) and Iwan (1966), and is based on a series of parallel spring, damper and
friction elements which when combined are capable of modelling complex hysteretic
behaviour. This approach to modelling has attracted recent attention from Mostaghel
(1999) and Deam (2000) who have both developed DE-based hysteresis models with
full pinching, degrading functionality which can accurately approximate real
hysteretic behaviour as observed in experiments on light-frame structures. These
models are described diagrammatically in Figures 3.7 and 3.8. The advantage of the
DE hysteresis models is that they can be defined analytically through mathematical
equations, rather than through a complicated set of rules, and can approach smooth
behaviour when many parallel elements are included. DE models can also be
formulated such that the parameters all have a direct physical interpretation, like a
mechanics-based model (see section 3.2.3).
Although the DE and PWNL hysteresis models are mathematically neater than the
PWL rule-based models, they are still quite complex in their formulation. A more
mathematically elegant approach to hysteresis modelling, in the opinion of the author,
is the differential approach to hysteresis modelling, where the hysteresis trace is
defined by a differential equation.

Chapter 3 – Hysteresis Modelling
123
Figure 3.5 – Model by Dolan (1989).
Figure 3.6 – Model by Kasal and Xu (1997).

Chapter 3 – Hysteresis Modelling
124
Figure 3.7 – Model by Mostaghel (1999).
Figure 3.8 – Model by Deam (2000).

Chapter 3 – Hysteresis Modelling
125
A differential hysteresis model was initially proposed and formulated by Bouc (1967)
and has been the subject of many revisions, modifications and applications. Wen
(1976;1980), Baber (1980), Baber and Wen (1981), Baber and Noori (1985; 1986),
Casciati (1989), Capecchi (1991), Foliente (1993; 1995), Madan et al. (1997),
Sivaselvan and Reinhorn (2000) and Wang and Wen (2000) have all modified the
model in some way. Many others have applied the model in their research. It is clear
from the sheer volume of literature associated with the differential model, that
researchers have been attracted by its mathematical elegance and simplicity.
Baber (1980) and Maldonado et al. (1987) examined in detail the properties of the
Bouc-Wen model. The derivation of the model from the theory of visco-plasticity and
its resemblance to the endochronic constitutive theory are discussed in Mettupalayam
and Reinhorn (2000) and Sivaselvan and Reinhorn (1999). A limitation of the early
form of the differential model was first reported by Maldonado et al. (1987) and
Casciati (1989). They observed that the model would not form a closed loop during
partial loading-unloading cycles and would effectively soften during reloading
without stress reversal. Thyagarajan (1990) also observed this limitation. He
compared the response of DE models to the Bouc-Wen differential model under
different loading regimes and showed that the Bouc-Wen model can drift
unrealistically along the displacement axis under these circumstances. This limitation
has relatively minor consequences in the case of seismic analysis however because
seismic excitations tend to induce large stress reversals which are relatively few in
number. In this case the artificial drifting effect is only minor.
Wen’s (1976;1980) modification to Bouc’s original model is probably the most
significant, as he generalised the model so that it could be used for random vibration
analysis (RVA) through Equivalent Linearisation (EQL). In EQL, the non-linear
differential system is replaced by a ‘statistically equivalent’ linear system, for which
the techniques of RVA can be used to calculate structural response to random
excitations in terms of statistical parameters rather than deterministic values. The
differential model is ideal for use in EQL because of its mathematical simplicity. The
methodology of the EQL for the differential model of hysteresis is outlined in more
detail in Chapter 4.

Chapter 3 – Hysteresis Modelling
126
Figure 3.9 – Possible hysteresis shapes of the basic Bouc-Wen model for n=1 (Baber, 1980).

Chapter 3 – Hysteresis Modelling
127
Baber and Wen (1981) enhanced the differential model to include stiffness and
strength degradation and extended it to MDOF systems. Baber and Noori (1985;
1986), and Foliente (1993) added pinching capability whilst maintaining its
tractability for EQL, but for SDOF systems only.
In the following chapters of this thesis, Foliente’s (1993) pinching degrading
modification of Bouc’s original model is used extensively. The hysteretic shapes that
the modified Bouc-Wen model is capable of generating are shown in Figure 3.9 and
demonstrated in section 3.5. The model parameters are described in Table 3.1. The
model is formally outlined in section 3.4, and implemented in two different MDOF
systems in Chapter 4 – a hysteretic shear-building model, and a hysteretic shear-wall
model. An EQL scheme for the shear-building model is also formulated and
implemented. A system identification method is developed to determine the
parameters of the modified Bouc-Wen model, based on experimental data, in section
3.5.
3.2.3 Phenomenological Versus Mechanics-Based Hysteresis Models
As described earlier, hysteresis models can be classified as either phenomenological
or mechanics-based. The underlying philosophy of the phenomenological approach to
hysteresis modelling is that the experimentally observed behaviour of the physical
system can be represented by some form of mathematical function (or set of rules),
without having regard to the physical and mechanical processes which cause that
behaviour. Phenomenological hysteresis models at the member level can be easily
assembled into a complete structural system. The alternative to this, is the mechanics-
based approach. Mechanics based-models are based on the individual component
behaviour, and interactions between components in the system [e.g. reinforced
concrete fibre model by Fardis (1991)]. They provide better insight into how material
properties affect the response, and allow prediction of cyclic response of a system
based only on the properties of its individual elements.

Chapter 3 – Hysteresis Modelling
128
Most of the hysteresis models outlined in section 3.2.2 are phenomenological in
philosophy. The DE family of models are the only possible exception, as they can be
derived from either a phenomenological or mechanics-based philosophy. Some of the
parameters of some of the phenomenological models do not have any physical
significance, although physical interpretations of their effect on model response can
be made. The advantage of the phenomenological approach to modelling is that in
theory, it allows great flexibility. A large range of systems can be represented by a
single model type, and very complex behaviour can be represented succinctly, and in
a mathematical form which is advantageous for higher-order analyses, such as in the
case of the differential model, which is tractable in approximate RVA using EQL (see
section 4.2.7). The disadvantage to this approach is that the model parameters can
often, in practice, only be obtained from experimental data, using some form of
system identification technique (see section 3.5). Each new structural or material
configuration to be modelled requires new experimental data. A solution to eliminate
this limitation is proposed later in this section, and is outlined diagrammatically in
Figure 3.10. Another limitation of the phenomenological approach to hysteresis
modelling, is that when the model parameters are based purely on an experiment of a
specific structural configuration, the parameters determined for one set of data, under
a single input function, may not necessarily predict the response under a different
input function. A method for minimising this problem, through ‘parallel system
identification’, is discussed in section 3.5.
Under the mechanics-based philosophy, physical processes and interactions between
conceptualised components of a structural system are modelled using the basic
principles of mechanics. For example, a nailed timber joint can be represented by the
combined mechanical behaviour of the fastener and of the timber members. Under
this approach, experimental data is not necessarily required for identification of model
parameters (although it is desirable), as the material properties of the individual
elements define the system. The material properties are already available for common
materials, based on previous experiments. However, if new materials are involved,
then parameters must be determined from new experiments. A mechanics-based
model for fasteners in timber structures has been developed by Foschi (2000). In this
mechanics-based model, the connecter (i.e. nail) is modelled as an elasto-plastic beam
in a non-linear medium (i.e. timber) which only acts in compression, allowing the

Chapter 3 – Hysteresis Modelling
129
formation of a gap between the nail and the timber. The model automatically adapts
to the input , and develops pinching and degradation as the nail-timber gap increases.
A big advantage of mechanics-based modelling is that the model parameters all have a
direct physical meaning, and hence the values for the parameters are more easily
estimated when experimental data is not available. This approach is often preferred by
practitioners and researchers due to its compatibility with their understanding of the
way that physical and mechanical systems behave. However, the nature of the
inelastic behaviour of complex configurations may not always be fully understood.
A major disadvantage with the mechanics-based approach is the lack of flexibility –
i.e. every different mechanical or structural configuration requires a different ‘model’
to represent its behaviour, and every different failure mechanism associated with each
configuration must be specifically accounted for and included in the model. If a
particular failure mechanism is not considered, then there is no way that the model
can predict it. Mechanics-based models can also be mathematically messy, and are
generally not tractable in higher-order analyses. Models of large systems can become
extremely computationally demanding.
Phenomenological and mechanics-based models need not be used exclusively; they
can in fact be used in tandem via system identification, as is shown in the example in
Figure 3.10. In this scheme, mechanics-based hysteresis loops for a joint are
synthetically generated, eliminating the need for configuration-based experimental
data. System identification can then be used to directly obtain the parameters of a
phenomenological model, based on the output from the mechanics-based model. This
approach is only effective when the mechanics-based model gives accurate prediction
of the joint response. If this is not the case, then testing should be performed, the
results from which should then be used to directly obtain the parameters of a
phenomenological model using system identification.

Chapter 3 – Hysteresis Modelling
130
Mechanics-BasedModel Input
* Member
* Fastener
Cyclic or Arbitrary Load
Mechanics-BasedModel Response
System ID
Phenomenological Model
Incorporate
Structural Model
Load Historyu(t) -Displacementv(t) -Velocitya(t) -Acceleratione(t) -Energy::
System Response
Frame
Lumped Mass
Finite Element
-200
-100
0
100
200
0 4 8 12 16
-30
-15
0
15
30
0 30 60 90
Series1
Figure 3.10 – Diagram showing hybrid approach to response analysis using both
mechanics-based and phenomenological models (Foliente et al., 1998b).

Chapter 3 – Hysteresis Modelling
131
3.2.4 Sensitivity of Response to Hysteresis Modelling
The previous section described a selection of the numerous hysteresis models that
have been developed, and highlighted the varying analytical complexity and
predictive capability of different approaches. Simple hysteresis models are desirable
for many reasons, including computational efficiency and ease of implementation, and
hence hysteretic pinching and degradation are often ignored in the hysteresis
modelling for structural analysis under seismic loads. This leads to some obvious
questions: Is this practice acceptable? Does the simplification produce conservative or
non-conservative results? Many researchers have attempted to answer these
questions, but their findings have been inconsistent.
Moss and Carr (1987) studied the dynamic response of several low-rise timber
structures, under different earthquake excitations, and varying approximations in
modelling the hysteresis. They concluded that variation in the hysteresis loop shape
does not have a major influence on the displacement demand under earthquake
excitation, although some of the results do not appear to support that conclusion.
Stewart (1987) also concluded that pinching, stiffness degradation, and hysteretic
damping have little influence on the predicted dynamic response, in terms of
displacement demand.
In contrast to the above findings, Aschheim et al. (1998) have shown that the peak
roof displacements of a reinforced concrete moment-resistant frame building that have
been computed using bilinear elements that lack cyclic stiffness degradation were less
than the actual displacements recorded during the 1994 Northridge earthquake. Other
models with stiffness degradation have been shown to better model the displacement
response and apparent elongation of period of this building (Moehle et al., 1997).
These corroborate the earlier finding by Chopra and Kan (1973), who investigated
how the ductility requirements for multi-storey, MDOF systems with stiffness
degrading behaviour compare with those with ordinary bilinear properties only.
Chopra and Kan also concluded that: 1) The differences in ductility requirements due
to stiffness degradation are generally smaller than those associated with probabilistic

Chapter 3 – Hysteresis Modelling
132
variability of ground motions; and 2) Stiffness degradation leads to increased ductility
requirements for stiff buildings (i.e. period T=0.5 sec or lower) but has little effect on
ductility requirements for flexible buildings (i.e. T=2.0 sec or higher). This is
significant in the context of light-frame construction, since most light-frame structures
have periods within the range T=0.1 to T=1.0 seconds (Foliente and Zacher, 1994),
where the sensitivity to ground motion is the greatest.
Iwan and Gates (1979) studied the effects of deterioration, stiffness degradation and
crack-slip (i.e. pinching) on ductility demands and effective linear system parameters
(i.e. period and damping). They obtained and compared the maximum response of six
types of hysteretic systems – ranging from the simple bilinear to the stiffness-
degrading and pinching type – for an ensemble of twelve earthquakes. They found
that at low to moderate levels of excitation, pinching could reduce the system
response, but under strong excitations pinching effects are much less apparent. The
primary effect of deterioration and stiffness degradation is to increase the effective
period of the system.
More recently, Aschheim and Black (1999) studied the effects of prior earthquake
damage on response of SDOF systems that exhibit degradation and pinching.
Computed peak displacement responses were compared between an initially-
undamaged oscillator and a previously-damaged oscillator but not between oscillators
with different hysteresis models.
The commentary to the 1997 US National Earthquake Hazard Reduction Program
Recommended Provisions recognises the effects of pinching on energy dissipation
capacity of the system and hints that it may affect the assignment of response
modification coefficient used for design (Building Seismic Safety Council 1997).
Paevere and Foliente (1999) compared the effect of nine different hysteresis
modelling approaches, on predicted response and reliability under a range of
earthquake excitations, for one, two and three-storey Japanese style timber houses.
They showed that the assumed hysteretic degradation and pinching in a SDOF model
can have a significant effect on the prediction of peak responses and reliability. The
nine different types of hysteresis model used in this study are shown in Figure 3.11

Chapter 3 – Hysteresis Modelling
133
(a). Each model type was subjected to a suite of artificially generated ground
motions, with variable peak ground accelerations, and a measure of the reliability was
calculated for each model type. The results are shown in Figure 3.11 (b). The
calculated reliability indices (β) given on the vertical axes, are defined as the value of
the standard normal variate, of the probability of exceeding the corresponding peak
displacement value given on the horizontal axes. Results are shown for system
frequencies of 5.5, 3.9 and 2.6 Hz, which are representative of one, two and three
storey houses, respectively. The plots shows that the hysteresis model used can have a
significant effect on the value of the reliability prediction obtained.
All of the studies reviewed in this section have provided useful insights, but have
adopted differing methodologies and used different response quantities for the basis of
the conclusions. Hence there is no general agreement or recommendations regarding
the effects of hysteretic pinching and degradation on system response. Some studies
have highlighted circumstances where the hysteresis assumptions can have a
significant impact on response predictions. Comprehensive studies need to be
undertaken to determine when it is appropriate to use simplified hysteresis models,
and when it is advisable to use a more complex model. It should always be understood
however, that the hysteresis modelling approach should be appropriate to the
objectives of the analysis.

Chapter 3 – Hysteresis Modelling
134
Hysteresis Cases Case Hysteresis
Type Strength Degradation
Stiffness Degradation
Pinching
1 Bouc-Wen
Yes* Yes* Yes*
2 PWL Yes Yes Yes 3 PWL Yes Yes No 4 PWL No Yes Yes 5 PWL No Yes No 6 PWL Yes No No 7 PWL Yes No Yes 8 PWL No No Yes 9 PWL No No No
* Fitted to experimental data
-50
-25
0
25
50
-30 -20 -10 0 10 20 30Displ (cm)
Ft (kN) ExperimentFitted BWBNF (Case1)
Ft(kN)
-50
-25
0
25
50
-10 -5 0 5 10-50
-25
0
25
50
-10 -5 0 5 10
-50
-25
0
25
50
-10 -5 0 5 10-50
-25
0
25
50
-10 -5 0 5 10
-50
-25
0
25
50
-10 -5 0 5 10-50
-25
0
25
50
-10 -5 0 5 10
-50
-25
0
25
50
-10 -5 0 5 10-50
-25
0
25
50
-10 -5 0 5 10
Case 2 Case 3
Case 4 Case 5
Case 6 Case 7
Case 8 Case 9
Displ(cm)
(a) Hysteresis modelling cases 1-9 used to calculate reliability estimates under Tokyo ground motions (Paevere and Foliente,1999)
Figure 3.11 – Hysteresis pinching and degradation effects on reliability estimation.

Chapter 3 – Hysteresis Modelling
135
-1.0
0.0
1.0
2.0
3.0
0 5 10 15 20 25 30
123456789
ββββ
2.6 Hz
-1.0
0.0
1.0
2.0
3.0
0 5 10 15 20 25 30
123456789
ββββ
3.9 Hz
-1.0
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0 5 10 15 20 25 30
123456789
peak displ (cm)
ββββ
5.5 Hz
(b) Reliability estimates (β) under Tokyo ground motions for hysteresis modelling cases 1-9 (Paevere and Foliente,1999).
Figure 3.11 (cont’d) – Hysteresis pinching and degradation effects on reliability estimation.

Chapter 3 – Hysteresis Modelling
136
3.3 Overview of System Identification
3.3.1 Introduction
A simple mathematical expression, that describes the behaviour of a structural system
under a time-varying load can be written in the following synthetic form:
ˆ ˆRU F= (3.1)
where R is a differential operator, U is the vector of the system response and F is
the vector of the time-varying actions. Two types of analysis are relevant in seismic
performance studies of light-frame structures:
1) The operation performed by the operator R is known and the actions defined by the
vector F are also known. This is a response analysis problem and requires the
solution of the response, described by vector U . This type of analysis is addressed in
Chapters 4 and 5 of this thesis.
2) When the vectors F and U are known, the problem is reduced to identifying the
operator R. This is known as a system identification problem and forms the basis of
the topic discussed in the following review.
There are basically two steps in constructing a model of the constitutive or hysteretic
relations of systems under cyclic loads from measured data: (a) select a family of
candidate models that represents the general behaviour of the physical system, and (b)
choose a particular member of this family that best describes the observed data.
Hysteresis model selection or development is typically in mind in step (a) and
parameter estimation or system identification in step (b). Once the hysteresis relations
of the materials, elements or systems have been identified/selected, these elements are
then assembled to model the structural system.
As outlined in section 3.2, many hysteresis models are already available for light-
frame structures, and a preferred model for use in this work, based on the Bouc-Wen
differential model, is outlined in section 3.4. However the need to obtain accurate and
reliable model input values has always been identified as a critical research need

Chapter 3 – Hysteresis Modelling
137
(Foliente 1997a, 1997b). The most commonly used method for evaluation of
hysteresis model parameters from experimental data, is trial-and-error, often using a
visual goodness-of-fit criterion. This is tedious and inconsistent. A systematic and
consistent method of parameter estimation is offered by system identification
procedures.
System identification is the process for constructing a mathematical description or
model of a physical system when both the input to the system and the corresponding
output are known. In structural engineering, the input is usually an excitation and the
output is the displacement, velocity, or acceleration response of the structure to this
excitation. Alternatively, as is often the case in seismic structural testing, the input
can be a displacement pattern and the output the corresponding pattern of resisting
force. The particular model obtained from the identification process should produce a
response that closely matches the system output, given the same input.
System identification methods may be generally classified as parametric or non-
parametric (Imai et al., 1989), or, in terms of sampled data or target quantities to be
estimated, as time-domain or frequency-domain. Parametric identification involves
iteratively modifying the parameters so as to minimise some objective function and is
independent of the model formulation, while non-parametric identification determines
the transfer function of the model in terms of its analytical representation and solves
for parameters directly. In the time domain methods, parameters are determined from
observational data, which are sampled in time, whereas in frequency domain methods,
damping ratios and modal response quantities are identified using frequency domain
measurements. In seismic response analysis of light-frame structures, the techniques
for parametric, time-domain identification are of most relevance because of the time-
dependent nature of load actions on a structure and the typical non-linear behaviour of
the response. Frequency domain methods inherently involve averaging of temporal
information, and hence discard some of the temporal detail. For light-frame systems,
in which the parameters can be expected to degrade over time, given the
experimentally observed characteristics, this averaging is not acceptable, and hence
only time domain methods are considered herein.

Chapter 3 – Hysteresis Modelling
138
System identification is relevant to structural analysis problems for two major
reasons: (a) for obtaining a system model from laboratory or field data for predicting
the structural response of similar real-world systems under adverse environmental
loadings, and (b) for estimating the existing conditions of structures for the
assessment of damage and deterioration. The latter may be used to obtain an
‘improved’ or ‘updated’ mathematical model that better represents the characteristics
of the existing structure.
3.3.2 System Identification Methodology
The methodology of all parametric system identification algorithms is given by the
following three steps:
1) Determine the form of the model and the system parameters
2) Select a criterion function (e.g., ‘goodness-of-fit’) to compare the model response
to the actual response, when both the model and the actual system are subjected to the
same input, and
3) Select an algorithm for systematic modification of the parameters to minimise
discrepancies between the model and the actual system responses.
Many algorithms have been developed for the system identification process (i.e. step
3, above) such as, Simplex Method, Gauss-Newton method, Kalman Filtering,
Genetic Algorithm, Simulated Annealing and Gradient based methods. The theory,
and descriptions of the algorithms, are widely available in textbooks on optimisation
and operations research.
In one of the few studies on system identification of hysteresis parameters, in a
structural engineering context, Kunnath et al. (1997), used a Gauss-Newton approach
to determine the hysteresis parameters for reinforced concrete sub-assemblages. The
hysteresis model used in their study was based on the Bouc-Wen model described
earlier. Zhang et al. (2001) also determined Bouc-Wen hysteresis parameters for
structural systems, using different identification techniques, but these results were
based on simulated (i.e. model-generated) input data rather than real experimentally
determined data.

Chapter 3 – Hysteresis Modelling
139
In this work, in section 3.5, the GRG method is used to identify the hysteresis
parameters of the modified Bouc-Wen model using a range of different input-output
data sets derived from physical experiments on light-frame structures. The GRG
method is an extension of the Wolfe algorithm (Charnes and Cooper, 1957) which can
accommodate both a non-linear objective function and also non-linear constraints on
the parameters. In essence, the method employs linear, or linearised constraints,
defines a new set of variables which are normal to some of the constraints, and then
transforms the gradient to this new basis (Himmelblau, 1972). The method is very
commonly used as it has been implemented into the ‘Microsoft Excel’ spreadsheet
software. Full details of the GRG method are given in Lasdon et al. (1978), and a
summary of the algorithm is reproduced in Appendix C.
3.4 Differential Hysteresis Model Formulation
3.4.1 Introduction
The following section outlines the differential hysteresis model which is used in the
structural modelling and performance analysis sections of this thesis. In Chapter 4, the
hysteresis model is implemented in to three different structural model representations:
• Hysteretic SDOF model (see sections 4.3 and 3.4)
• Hysteretic shear-building model (see section 4.4)
• Hysteretic shear-wall model (see section 4.5)
The hysteresis model is based on a version of the Bouc-Wen differential model which
was enhanced by Baber and Wen (1981), Baber and Noori (1985; 1986) and Foliente
(1993; 1995) to incorporate strength and stiffness degradation and pinching
functionality. These enhanced features make the model suitable for the analysis of
light-frame systems under seismic loads. In addition to this, the model is also tractable
in RVA through EQL, whereby response statistics under random excitations can be
determined directly, without the need to use computationally expensive simulation
techniques (described in section 4.2). A complete description and formulation of the
hysteresis model, including the theoretical basis, is given in Foliente (1993). A

Chapter 3 – Hysteresis Modelling
140
summary of the essential equations and parameters of the model, and demonstration
of its capabilities are given in the following section.
3.4.2 Model Formulation
Consider a hysteretic structural system as shown in Figure 3.12. Assuming a single-
degree-of-freedom only, and a forcing function F(t), the equation of motion may be
generally written as:
mu cu R u t z t t F t�� � [ ( ), ( ); ] ( )+ + = (3.2)
where u is the displacement, and the dots represent derivatives with respect to time.
The restoring forces acting on the mass m are broken into discrete components. The
inertial restoring force is given by mu�� . The damping restoring force is given by cu�
and is assumed linear. The non-damping restoring force is given by R u t z t t[ ( ), ( ); ] and
consists of a linear and a hysteretic (non-linear) component. The linear component is
given by αku and the hysteretic component is given by ( )1−α kz , where α is a
weighting constant representing the relative participations of the linear and non-linear
terms. If the equation of motion is mass normalised, the following standard form is
obtained.
�� � ( ) ( )u u u z f t+ + + − =2 10 0 02
02ξ ω αω α ω (3.3)
where f(t) is the mass-normalised forcing function (i.e. acceleration); all other
undefined symbols are described in Table 3.1 The hysteretic displacement z is a
function of the time history of u. It is related to u by the following first-order non-
linear differential equation.

Chapter 3 – Hysteresis Modelling
141
1( )
( )n nAu u z z u z
z h zν β γ
η
− − + =
� � �� (3.4)
where:
h z z u qz /u( ) . exp sgn �= − − −LNM
OQP10 1
222ζ ζb gc h (3.5)
ζ ε ζ ε1 10( ) [ . exp( )]= − −s p (3.6)
ζ ε ψ δ ε λ ζψ2 1( ) ( )( )= + +o (3.7)
ν ε δ εν( ) .= +10 (3.8)
η ε δ εη( ) .= +10 (3.9)
ε = z zudttt f
�0
(3.10)
1/
( )
n
uAZ
ν β γ = +
(3.11)
inertiaforcingfunction
F(t)m
linear
nonlinear(hysteretic)
viscousdamping
Figure 3.12 – SDOF hysteretic structural system.

Chapter 3 – Hysteresis Modelling
142
Table 3.1 – Description of system properties and hysteresis model parameters.
Parameter / Property
Description
ω 0 natural frequency of the linear system = k m/
ξo damping ratio of the linear system
k Initial stiffness of the linear system
Fu maximum load
A parameter that regulates ultimate hysteretic restoring force
α ratio of linear to non-linear contribution to restoring force
β, γ hysteresis shape parameters (see Figure 3.9)
n parameter which controls the 'sharpness' of yield
ε calculated energy dissipation
δ δν η, strength, stiffness degradation parameters
( ) ( ),ν ε η ε strength and stiffness degradation functions
h(z) pinching function; if h(z) = 1.0, model does not pinch.
( )1ζ ε function that controls the severity of pinching
( )2ζ ε function that controls the rate of pinching
ζ s parameter that indicates degree of pinching
λ pinching parameter that controls the rate of change of ζ 2 as ζ1 changes
q pinching parameter that controls the percentage of ultimate restoring force
zu where pinching occurs
p pinching parameter that controls the initial drop in slope
ψ o pinching parameter that contributes to the amount of pinching
δψ pinching parameter that controls the rate of change of ζ 2

Chapter 3 – Hysteresis Modelling
143
The model is capable of simulating a range of softening and hardening behaviour,
depending on the values of the main shape parameters β and γ , the range of basic
hysteresis shapes which are possible for various values of β and γ are shown in Figure
3.9. The cyclic degradation of strength and stiffness are linear functions of the
energy dissipation (Eqs. 3.8 and 3.9) and are controlled by the parameters νδ and ηδ .
Hysteretic pinching is also a function of energy dissipation (Eqs. 3.6 and 3.7) and is
controlled by the parameters ζ s , λ , q, p, ψ o and δψ .
By adjusting the parameters of the model, which are described in Table 3.1, a wide
range of different hysteretic behaviour(s) can be simulated. Some of these are
demonstrated in section 3.5. Although the model is powerful in its capability to
simulate complex behaviour, the relatively large number of model parameters means
that trial-and-error or eyeball evaluation of the parameters for a specific experimental
data set is tedious and inconsistent. A systematic and consistent method of parameter
estimation is needed. This is offered by system identification techniques, which are
demonstrated in the following section.
3.5 System Identification of Hysteresis Parameters
3.5.1 Introduction
In the following section, the GRG method of system identification is used to
determine the parameters for the modified Bouc-Wen model of hysteresis, as outlined
in the previous section, for a range of different experimental data sets. A parallel
system identification philosophy is also outlined and illustrated through two
examples. In these examples a single set of hysteresis model parameters is fitted to
two different experimental data sets simultaneously. The two different data sets are
derived from identical test specimens under different applied loading. Finally, the
modified Bouc-Wen hysteresis parameters are determined for the full-scale
experiment described in Chapter 2. The GRG method is used to determine the
parameters for the whole-building response, as well as individual wall sub-systems.

Chapter 3 – Hysteresis Modelling
144
The hysteresis model which is used in this thesis (the modified Bouc-Wen model) and
the system identification algorithm employed herein (GRG method) need to be
validated for a range of test data, especially those obtained from evaluation of light-
frame subassemblies, and full-scale timber buildings. The following sections
demonstrate the versatility and applicability of the modified differential hysteresis
model, when the model parameters are identified using the GRG system identification
algorithm.
3.5.2 System Identification for a Range of Different Systems
To demonstrate the capability of the modified Bouc-Wen model to accurately track
the force-displacement level for a range of systems at all displacement levels, the
hysteresis parameters for four different structural systems were determined using the
GRG method, based on experimental data.
The four different structural systems considered are:
• A plywood sheathed shear-wall under pseudo-dynamic earthquake loading
(Karacabeyli and Ceccotti, 1998)
• A plasterboard lined light gauge steel frame under static-cyclic loading (Gad,
1997)
• A pre-cast concrete wall to slab connection under static-cyclic loading
(Robinson et al., 1999)
• A one-room Japanese post and beam house under pseudo-dynamic earthquake
loading (Watanabe et al., 1998)
Each of the four systems are modelled using a displacement controlled approach.
Under this approach, the input to the system is assumed to be the displacement
pattern, and the output of the system is the restoring force. This is how most static-
cyclic tests for seismic resistance are conducted. The parameters of the modified
Bouc-Wen model for each of the systems were then determined using the GRG
method, and the experimentally determined force-displacement data.

Chapter 3 – Hysteresis Modelling
145
The objective function to be minimised was the error between the experimental and
model data. This error was based on the difference between the experimentally and
model determined restoring force and energy dissipation as follows
( ) ( )2 2
exp mod exp modf eerror W F F W E E = − + − ∑ ∑ (3.12)
where:
Fexp = experimentally determined restoring force (i.e. load)
Fmod = model calculated restoring force
Wf = weighting factor for force error
Eexp = experimentally determined energy dissipation
Emod = model calculated energy dissipation
We = weighting factor for energy error
The weighting factors We and Wf are used to control the importance of the force or
the energy component of the error in the system identification procedure.
Theoretically, if the force component of the error is zero, then the error in the energy
dissipation will also be zero because the hysteresis traces will match identically. In
practice, the error in the force calculation is never zero, and hence there are a set of
solutions which will give a similar level of error. By optimising for both force and
energy simultaneously, the set of parameters which also has the closest shape (and
hence energy dissipation) to the experimental data is computed. This is desirable
from a modelling point of view, as it may be important in some types of analysis to be
able to accurately predict the energy dissipation as well as the level of force or
displacement under seismic loading. In all of the system identification presented in
this thesis, the values of We and Wf were chosen such that the error contributions from
‘energy’ and ‘force’ were equal in magnitude. Each time the identification procedure
converged to a solution, We and Wf were adjusted to give equal ‘force’ and energy’
error components, and the procedure was re-run, until no further convergence could
be obtained.
A summary of the four experiments and the identified model parameters is given in
Table 3.2. Plots comparing the experimental- and the model-calculated responses, in

Chapter 3 – Hysteresis Modelling
146
terms of the hysteresis response as well as energy dissipation are given in Figures 3.13
to 3.16. It is clear from these plots that the model is very good in simulating the
force-displacement response of the systems shown, even under extreme levels of
applied displacement. The energy dissipation can also be simulated very accurately.
Each of these four systems exhibit the kind of non-linear, pinching and cyclically
degrading behaviour which is typical of light-frame structures, and also other systems
(such as the reinforced concrete connection in Figure 3.15).
It should be noted, that in the displacement-controlled approach adopted here, no
dynamic response is considered, and hence the mass and damping parameters do not
form part of the identification problem. The hysteresis model used in the
identification procedure, calculates the restoring force as a function of the
displacement only, and hence only the parameters which affect the shape of the
hysteresis are determined. This is appropriate for identifying parameters from
displacement-controlled physical testing (such as static-cyclic testing) where the
‘input’ is the displacement pattern and the ‘output’ is the restoring force. It is
assumed in this work that this approach is also appropriate for pseudo-dynamic test
data. The procedure can be just as easily used to determine the parameters of the
system based on dynamic test data (i.e. from shake-table) as well. For this case, the
‘input’ would be the excitation acceleration and the ‘output’ would be the
displacement, velocity or acceleration response, which must be calculated using a
dynamic model.
3.5.3 Parallel System Identification
A possible limitation of the phenomenological approach to hysteresis modelling,
where the parameters are based purely on experimental data, is that the model
parameters determined for one set of data, under a single input function, may not
necessarily predict the response under a different input function. This can be a
problem because the whole purpose of having a model, is to use it for predicting
responses to unknown future excitations.

Chapter 3 – Hysteresis Modelling
147
In order to determine the parameters of a phenomenological model, which is valid for
an infinite set of input functions (i.e. excitations), it is necessary to derive a single set
of model parameters, based on an infinite number of experiments where each
experiment uses an identical specimen and a different excitation. This is clearly not
possible. However, it is possible to derive the model parameters based on a finite
number of experiments which are conducted under a finite and realistic range of
excitations. In order for this to be possible, the system identification for each
different excitation data set must be conducted simultaneously or in parallel, and there
must be a single set of parameters in existence, which can adequately model the
behaviour of the system under all the excitations.
In this work, identical types of shear-wall construction, which have been physically
tested under two different excitations, are used to demonstrate this concept of parallel
system identification and show that it is feasible to derive a single set of satisfactory
model parameters for a system under at least two different excitations.
In the first example, a timber-frame shear-wall which has been tested ‘pseudo-
dynamically’ under a displacement response time history, obtained from dynamic
analysis (Karacabeyli and Ceccotti, 1998) using two different scalars of the
Northridge earthquake is fitted using the parallel system identification. The unique
set of parameters for this system is given in Table 3.3, and the comparison between
the experiment and model data is shown in Figure 3.17. The fit between the model
and experiment is excellent in terms of both the hysteresis trace and the energy
dissipation. In this example, the two different excitations used are similar in content
but different in magnitude.
In the second example a different configuration of timber shear-wall, which has been
tested under static-cyclic and then pseudo-dynamic earthquake loading (Kawai 1998)
is fitted using the parallel system identification. These two excitations are quite
different in content and in magnitude and are therefore more of a challenge to fit in
parallel than the data in the previous example. The unique set of parameters for this
system is also given in Table 3.3, and the comparison between the experiment and
model data is shown in Figure 3.18. Note that the values for stiffness and ultimate
load are different for the two different systems. This is because the static cyclic test

Chapter 3 – Hysteresis Modelling
148
was conducted on a single wall panel, and the pseudo-dynamic test was conducted on
a double wall panel. The construction type is identical, and it was therefore assumed
that all parameters except the stiffness and ultimate load could be considered
identical, and the system identification was constrained as such. The fit between the
model and experiment is still good in terms of both the hysteresis trace and the energy
dissipation, but is not as good as in the first example, or in the single dataset examples
shown earlier.
Figures 3.17 and 3.18 show that it is possible to obtain a satisfactory
phenomenological model, defined by a single set of parameters, which can simulate
the response of a system to very different excitations obtained from experiments.
This means that the ‘hybrid’ analysis technique shown in Figure 3.10 can also be used
in a similar fashion. A mechanics-based model (instead of an experiment) could be
used to generate the response under a range of different excitations. The parallel
system identification, can then be used, in principle, to compute a single
phenomenological model which satisfactorily simulates all the responses. The
feasibility of this technique, and the implications for analytical modelling and
performance prediction warrant further study. It may well be the case that models
based on multiple data sets with different excitations (analogous to ground motion
variability), are preferable to models based on experimental data containing multiple
repeats under the same excitation (analogous to material or system variability). If this
were the case then there may be implications in the development of future state-of-
the-art analytical modelling and laboratory testing strategies.
3.5.4 Identification of Hysteresis Parameters for Whole-Building Test Data
The previous sections have demonstrated the capabilities of the modified Bouc-Wen
differential model of hysteresis in simulating the experimentally observed behaviour
of light-frame structural systems taken from the literature. In the following section,
modified Bouc-Wen model parameters are identified for the full-scale destructive
experiment described in Chapter 2. Firstly, the parameters are determined for the
whole house response. These parameters are used later, in Chapter 5, in a SDOF
model of the house, for deterministic and stochastic seismic response analyses. The

Chapter 3 – Hysteresis Modelling
149
model parameters of the individual walls are also determined (where possible). These
parameters are used later in a hysteretic shear-wall model of the house, which
includes elements to represent the characteristics of the individual walls. This model
is developed and presented in Chapter 4, and is used in seismic response analysis in
Chapter 5.
As for the previous examples, the model parameters for the whole house and each of
the individual wall sub-systems were determined using the GRG method. As before,
the model was set with displacement as the input and restoring force as the output,
and as such the mass and damping have no influence. This is appropriate for this
static-cyclic displacement controlled experiment. The parameters were determined by
minimising the error between the experimentally derived and model determined
restoring forces and energy dissipation (simultaneously), with We and Wf determined
for equal ‘force’ and ‘energy’ error contribution.
A summary of the identified parameters for the whole house and individual walls is
given in Table 3.4. Plots comparing the experimental and the model calculated
response for the whole house and individual walls are given in Figures 3.19 to 3.25.
These plots demonstrate a very good fit for all the walls in terms of both hysteresis
trace and energy dissipation, however wall W4 is not as good as the others in the final
load cycles. Wall W4 is of similar construction to wall W2 (i.e. plywood and
plasterboard sheathed) but is pushed to much higher displacements than wall W2 in
the experiment. It seems that at very large displacements, the cyclic degradation
cannot be modelled as a linear function of energy dissipation – which is the
assumption in the differential hysteresis model. However at smaller displacement
levels, the degradation of the plywood/plasterboard sheathed walls can be adequately
modelled as a linear function of energy dissipation (i..e. for walls W1, W2, W5, W9)
in the differential hysteresis model. For wall W3, which is sheathed with plasterboard
on both sides, it appears that the degradation can be modelled as a linear function of
energy dissipation at all displacement levels considered.
It should be noted that the wall stiffness values given in Table 3.4 are quite different
from those derived from the initial cycles of the destructive testing, given in Table
2.7. This is because the stiffness values in Table 2.7 are based on the initial tangent

Chapter 3 – Hysteresis Modelling
150
stiffness of the walls (values in first row), and on the secant stiffness at 1.0mm
displacement (values in second row), as measured in the destructive experiment. The
values in Table 3.4 however, are derived from the system identification process as
outlined above. They are calculated such that the best-fit hysteresis trace is obtained
over the entire response, not just at the origin, and have little to do with the initial or
secant (1.0mm) stiffness. This is because the hysteresis is non-linear from the origin.
The identified wall and house stiffness values, in Table 3.4, are appropriate for use in
seismic response modelling, as they enable accurate predictions well into the inelastic
range.
Note also that the degradation and pinching parameters, given in Table 3.4, are
identical for walls W1 and W2. Only the parameters which affect the stiffness and
ultimate strength are different (i.e. k an γ). These walls are of similar construction
and exhibit very similar hysteretic characteristics (except for the strength and
stiffness), so this is reasonable. The system identification for these walls was carried
out in parallel, with the problem constrained such that all the pinching and
degradation parameters were the same for both walls. The identical situation applies
to walls W5 and W9. The pinching and degradation characteristics of these two walls
are very similar – but the stiffness and strength are different, so the identification was
constrained appropriately. Parameters for wall W6 to W8 (i.e. walls W6, W7 and W8
grouped into a single wall), could not be fitted based on the experimental data,
because the response under the applied loading was too small. The pinching and
degradation parameters for wall W6 to 8 were assumed to be the same as for walls
W5 and W9, and the stiffness and strength parameters were estimated, using the
results from other walls, and the perforated shear-wall method (NAHBRC, 2000). It
should also be noted that in the experiment, walls W1, W2, W5, W6-8, and W9 had
no load applied directly, and as a result, experienced much smaller displacement
levels than the loaded walls (W3 and W4). Under these less severe displacements, the
degradation and pinching are not as pronounced, and as a result, the parameters which
control pinching and degradation do not affect the fit to the test data, as significantly
as for walls W3 and W4. The parameters assigned to all the walls, are technically
only valid for the range of displacements which they were subjected to in the
experiment, however, for the purposes of the modelling in Chapter 5, they are

Chapter 3 – Hysteresis Modelling
151
assumed to be valid for all displacement levels considered. Ideally, all of the
individual walls would have different parameters, because they have different
configurations and hence different behaviour would be expected, except for perhaps
the two end walls W5 and W9 which are almost identical except for their length.
However it was not possible to configure a single experiment of this type, such that all
the walls would all be subjected to large enough displacements to completely induce
the degrading pinching behaviour that would be preferable for the parameter fitting.
Table 3.2 – Fitted hysteresis parameters for various pinching, degrading structural systems.
System Timber-frame (4x2) plywood-sheathed
shear-wall without blocking
Light gauge steel frame house with
plasterboard lining
Pre-cast concrete panel to concrete slab connection
Japanese style timber framed post and beam house
Loading Pseudo-Dynamic VanCouver-0.57g Static-Cyclic Static-Cyclic Pseudo-Dynamic
Kobe-0.8g
Experiment Reference
Karacabeyli and Ceccotti (1998)
Gad (1997)
Robinson et al. (1999)
Watanabe et al. (1998)
k (kN/cm) 25.0 8.0 40.0 23.2
Fu (kN) 50.0 35.0 50.0 50.0
n 1 1 1 1
A 1.6 0.74 0.6 1
α
0.00100 0.00001 0.00001 0.00001
δν
0.0653 0.0000 0.0069 0.0040
δη
0.0727 0.0129 0.0766 0.5078
ζs 0.682 0.827 0.858 0.958
q 0.00357 0.03177 0.00000 0.00000
p 0.713 0.118 1.501 12.061
ψ
0.3513 0.8744 0.1982 0.0689
δψ
0.0032 0.0021 0.0000 0.0003
λ
1.147 2.000 1.269 0.318
β
0.809 0.714 0.599 2.000
γ -0.602 -0.745 -0.443 -1.735

Chapter 3 – Hysteresis Modelling
152
-60
-40
-20
0
20
40
60
-10 -5 0 5 10Displacement (cm)
Model
Experiment
Load (kN)
05
1015202530354045
0 20 40 60
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-60
-40
-20
0
20
40
60
-10 -5 0 5 10Displacement (cm)
Model
Load (kN)
-60
-40
-20
0
20
40
60
-10 -5 0 5 10Displacement (cm)
Experiment
Load (kN)
Figure 3.13 – Experimental and fitted hysteresis for a timber framed shear-wall without blocking [experimental data from Karacabeyli and Ceccotti (1998)].

Chapter 3 – Hysteresis Modelling
153
-40
-30
-20
-10
0
10
20
30
40
-25 -15 -5 5 15 25Displacement (cm)
Model
Experiment
Load (kN)
0
20
40
60
80
100
120
140
160
0 5 10 15 20 25
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-40
-30
-20
-10
0
10
20
30
40
-25 -15 -5 5 15 25Displacement (cm)
Model
Load (kN)
-40
-30
-20
-10
0
10
20
30
40
-25 -15 -5 5 15 25Displacement (cm)
Experiment
Load (kN)
Figure 3.14 – Experimental and fitted hysteresis for a light-gauge steel-framed house with plasterboard lining [experimental data from Gad (1997)].

Chapter 3 – Hysteresis Modelling
154
-60
-40
-20
0
20
40
60
-25 -15 -5 5 15 25Displacement (cm)
Model
Experiment
Load (kN)
0
10
20
30
40
50
60
70
80
0 10 20 30 40
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-60
-40
-20
0
20
40
60
-25 -15 -5 5 15 25Displacement (cm)
Model
Load (kN)
-60
-40
-20
0
20
40
60
-25 -15 -5 5 15 25Displacement (cm)
Experiment
Load (kN)
Figure 3.15 – Experimental and fitted hysteresis for a pre-cast concrete wall to slab connection [experimental data from Robinson et al. (1999)].

Chapter 3 – Hysteresis Modelling
155
-50
-25
0
25
50
-40 -20 0 20 40Displacement (cm)
Model
Experiment
Load (kN)
0
10
20
30
40
50
60
0 4 8 12
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-50
-25
0
25
50
-40 -20 0 20 40Displacement (cm)
Model
Load (kN)
-50
-25
0
25
50
-40 -20 0 20 40Displacement (cm)
Experiment
Load (kN)
Figure 3.16 – Experimental and fitted hysteresis for a one-room Japanese-style post and beam house – [experimental data from Watanabe et al. (1998)].

Chapter 3 – Hysteresis Modelling
156
Table 3.3 – Fitted hysteresis parameters, using parallel system identification for two different shear-wall systems.
System Single skin timber
shear-wall post and beam construction
Double skin timber shear-wall post and beam construction
Timber-frame (4x2) plywood sheathed shear-wall
with blocking
Loading Static-Cyclic Pseudo-Dynamic Kobe-0.8g
Pseudo-Dynamic Northridge-0.23g
Pseudo-Dynamic Northridge-0.38g
Experiment Reference Kawai (1998) Karacabeyli and Ceccotti (1998)
k (kN/cm) 5.0 10.0 25.0
Fu (kN) 10.0 17.0 50.0
n 1 1 1
A 1 1 1
α
0.00001 0.00001 0.00001
δν
0.0100 0.0100 0.0072
δη
0.0275 0.0275 0.0005
ζo 0.945 0.945 0.952
q 0.0815 0.0815 0.0834
p 2.000 2.000 0.504
ψ
0.1320 0.1320 0.0016
δψ
0.0050 0.0050 0.0036
λ
0.398 0.398 10.000
β
0.200 0.200 0.915
γ 0.303 0.153 -0.415

Chapter 3 – Hysteresis Modelling
157
-60
-40
-20
0
20
40
60
-6 -4 -2 0 2 4Displacement (cm)
Model
Experiment
Load (kN)
0
2
4
6
8
10
12
14
16
0 20 40 60
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-60
-40
-20
0
20
40
60
-10 -5 0 5 10Displacement (cm)
Model
Experiment
Load (kN)
0
5
10
15
20
25
30
0 20 40 60 80 100
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
Figure 3.17 – Parallel system identification example 1 Experimental and fitted hysteresis responses for timber framed shear-wall under
0.23g Northridge earthquake and 0.38g Northridge Earthquake [experimental data from Karacabeyli and Ceccotti (1995)].

Chapter 3 – Hysteresis Modelling
158
-10
-5
0
5
10
-20 -10 0 10 20Displacement (cm)
Model
Experiment
Load (kN)
0
20
40
60
80
100
0 5 10 15 20
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
-20
-15
-10
-5
0
5
10
15
20
-20 -10 0 10 20Displacement (cm)
Model
Experiment
Load (kN)
0
20
40
60
0 5 10 15 20
Psuedo Time (seconds)
Model
Experiment
Hysteretic Energy Dissipation
Figure 3.18 – Parallel system identification example 2 Experimental and fitted hysteresis responses for Japanese style timber-frame shear-
wall under static-cyclic loading (single wall) and 0.8g Kobe earthquake (double-wall) [experimental data from Kawai (1998)].

Chapter 3 – Hysteresis Modelling
159
Table 3.4 – Fitted hysteresis parameters for L-shaped test-house and its individual wall sub-systems.
System House (N-S) W1 W2 W3 W4 W5 W6-8 W9
k (kN/cm) 119.0 4.0 20.0 60.0 35.0 40.0 40.0 45.0
Fu (kN) 106.0 12.0 30.0 35.0 55.0 30.0 30.0 40.0
n 1 1 1 1 1 1 1 1
A 1 1 1 1 1 1 1 1
α
0.00001 0.07533 0.07533 0.00010 0.00001 0.00001 0.00001 0.00001
δν
0.0164 0.0107 0.0107 0.1500 0.0150 0.0500 0.0500 0.0500
δη
0.0373 0.0130 0.0130 0.0500 0.0108 0.0500 0.0500 0.0500
ζs 0.951 0.900 0.900 0.980 0.960 0.950 0.950 0.950
q 0.00076 0.03413 0.03413 0.00152 1E-06 1E-06 1E-06 1E-06
p 3.478 3.672 3.672 6.374 2.783 2.428 2.428 2.428
ψ
0.0574 0.0261 0.0261 0.0805 0.0497 0.1160 0.1160 0.1160
δψ
0.0107 0.0267 0.0267 0.0875 0.0182 0.0001 0.0001 0.0001
λ
1.798 0.712 0.712 0.466 1E-06 0.838 0.838 0.838
β
0.219 0.500 0.500 0.258 0.200 1.690 1.690 1.690
γ 0.904 -0.167 0.167 1.456 0.436 -0.356 -0.190 -0.565

Chapter 3 – Hysteresis Modelling
160
-120
-80
-40
0
40
80
120
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Experiment
Load (kN)
0
5
10
15
20
25
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-120
-80
-40
0
40
80
120
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Load (kN)
-120
-80
-40
0
40
80
120
-12 -8 -4 0 4 8 12Displacement (cm)
Experiment
Load (kN)
Figure 3.19 – Experimental and fitted hysteresis of test house.

Chapter 3 – Hysteresis Modelling
161
-10
-8
-6
-4
-2
0
2
4
6
8
-10 -5 0 5 10Displacement (cm)
Model
Experiment
Load (kN)
0
0.2
0.4
0.6
0.8
1
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-10
-8
-6
-4
-2
0
2
4
6
8
-10 -5 0 5 10Displacement (cm)
Model
Load (kN)
-10
-8
-6
-4
-2
0
2
4
6
8
-10 -5 0 5 10Displacement (cm)
Experiment
Load (kN)
Figure 3.20 – Experimental and fitted hysteresis of wall W1 from test house.

Chapter 3 – Hysteresis Modelling
162
-40
-30
-20
-10
0
10
20
30
40
-10 -5 0 5 10Displacement (cm)
Model
Experiment
Load (kN)
00.5
11.5
2
2.53
3.54
4.5
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-40
-30
-20
-10
0
10
20
30
40
-10 -5 0 5 10Displacement (cm)
Model
Load (kN)
-40
-30
-20
-10
0
10
20
30
40
-10 -5 0 5 10Displacement (cm)
Experiment
Load (kN)
Figure 3.21 – Experimental and fitted hysteresis of wall W2 from test house.

Chapter 3 – Hysteresis Modelling
163
-50
-40
-30
-20
-10
0
10
20
30
40
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Experiment
Load (kN)
0
0.5
1
1.5
2
2.5
3
3.5
4
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-40
-30
-20
-10
0
10
20
30
40
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Load (kN)
-50
-40
-30
-20
-10
0
10
20
30
40
-12 -8 -4 0 4 8 12Displacement (cm)
Experiment
Load (kN)
Figure 3.22 – Experimental and fitted hysteresis of wall W3 from test house.

Chapter 3 – Hysteresis Modelling
164
-60
-40
-20
0
20
40
60
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Experiment
Load (kN)
02468
1012141618
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-60
-40
-20
0
20
40
60
-12 -8 -4 0 4 8 12Displacement (cm)
Model
Load (kN)
-60
-40
-20
0
20
40
60
-12 -8 -4 0 4 8 12Displacement (cm)
Experiment
Load (kN)
Figure 3.23 – Experimental and fitted hysteresis of wall W4 from test house.

Chapter 3 – Hysteresis Modelling
165
-20
-15
-10
-5
0
5
10
15
20
-2 -1 0 1 2Displacement (cm)
Model
Experiment
Load (kN)
0
0.2
0.4
0.6
0.8
1
1.2
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-20
-15
-10
-5
0
5
10
15
20
-2 -1 0 1 2Displacement (cm)
Model
Load (kN)
-20
-15
-10
-5
0
5
10
15
20
-2 -1 0 1 2Displacement (cm)
Experiment
Load (kN)
Figure 3.24 – Experimental and fitted hysteresis of wall W5 from test house.

Chapter 3 – Hysteresis Modelling
166
-20
-15
-10
-5
0
5
10
15
20
25
-1.5 -1 -0.5 0 0.5 1 1.5Displacement (cm)
Model
Experiment
Load (kN)
0
0.1
0.2
0.3
0.4
0.5
0.6
0 1 2 3 4
Time (hours)
Model
Experiment
Hysteretic Energy Dissipation
-20
-15
-10
-5
0
5
10
15
20
-1.5 -1 -0.5 0 0.5 1 1.5Displacement (cm)
Model
Load (kN)
-20
-15
-10
-5
0
5
10
15
20
-1.5 -1 -0.5 0 0.5 1 1.5Displacement (cm)
Experiment
Load (kN)
Figure 3.25 – Experimental and fitted hysteresis of wall W9 from test house.

Chapter 3 – Hysteresis Modelling
167
3.6 Summary and Conclusions
This chapter presented a review of hysteresis modelling and system identification
techniques, and then determined hysteresis model parameters for a range of different
systems taken from the literature, and for global and individual wall responses of the
test-house described in Chapter 2. A ‘parallel’ system identification procedure was
also demonstrated. The key points and findings are summarised as follows.
• The literature on hysteresis modelling indicates that there is no general
agreement regarding the effects of hysteretic pinching and degradation on
predicted system response. Some studies have highlighted circumstances
where the hysteresis assumptions can have a significant impact on response
predictions. Comprehensive studies need to be undertaken to determine when
it is appropriate to use simplified hysteresis models, and when it is advisable
to use a more complex model.
• A formulation for a modified Bouc-Wen differential hysteresis model was
presented based on work by Foliente (1993; 1995). This model has pinching
and strength and stiffness degradation functions to accurately simulate the
behaviour of light-frame structures under seismic loading. The pinching and
degradation in the model are controlled by energy dissipation.
• The GRG method of system identification was used to determine the
parameters for the modified Bouc-Wen hysteresis model, for four different
experimental data sets, taken from the literature. These included timber,
concrete and light-gauge steel systems. The model-computed hysteresis
closely matched the experimental data in all cases, in terms of both hysteresis
shape, and energy dissipation. The examples demonstrated that system
identification provides a systematic and consistent method of estimating
hysteresis model parameters from real test data. The examples also
demonstrated the capabilities of the modified Bouc-Wen hysteresis model in
simulating real test data which exhibits highly pinched and degrading
behaviour.

Chapter 3 – Hysteresis Modelling
168
• A ‘parallel’ system identification approach was outlined and illustrated
through two examples. It was demonstrated that a single set of hysteresis
model parameters can be satisfactorily fitted to two different experimental data
sets simultaneously, where the two different data sets are derived from
identical test specimens under different applied loading. The first example
involved a timber-frame shear-wall which was tested pseudo-dynamically
under two different scalars of the Northridge earthquake. The second example
involved a Japanese-style timber shear-wall, which was tested under static-
cyclic and then pseudo-dynamic earthquake loading The feasibility of this
technique, and the implications for analytical modelling and performance
prediction warrant further study, as this finding may have implications for
future analytical modelling and laboratory testing strategies.
• Finally, the modified Bouc-Wen hysteresis parameters were determined for
the test house using the experimental results presented in Chapter 2. The GRG
method was used to determine hysteresis parameters for the whole-building
response, and for the individual wall sub-systems. The model-computed
hysteresis closely matched the experimental data in all cases, in terms of both
hysteresis shape, and energy dissipation.

Chapter 4 – Structural Modelling
169
CHAPTER 4
Structural Modelling
4.1 Introduction
In the previous chapter, the modelling of the force-displacement relationship, or
hysteresis, for light-frame structures was addressed. This chapter extends from this to
examine analytical modelling of the seismic response of the complete light-frame
structure. Analytical modelling is very important for gaining understanding of
structural performance during earthquakes. Physical experiments, such as those
described in Chapter 2, provide valuable information about the behaviour of specific
structural components or full-scale configurations under specific loading scenarios,
but modelling is required to extend this knowledge so that it can be used to predict
responses of different configurations to future unknown events. Various modelling
strategies can be used to predict structural responses under specified earthquakes, or
to a spectrum of likely earthquakes. Such models can be used for parametric studies
to determine how various structural or earthquake characteristics contribute to the
overall performance, and for the development and calibration of codes of practice to
be used by designers. Modelling is also important to help understand data gathered
during damage surveys after seismic events, and data from controlled physical
experiments. The models can then be used to direct future experimental testing and
damage surveys in the right direction.
The long-term vision for this project is to make light-frame structures more affordable
and safer for people than they currently are through appropriate efficiency in the
structural system. Necessary to this goal is the development of modelling tools and
procedures that can be used to establish the structural performance, and the
performance criteria for light-frame buildings. These can then be used to optimise
their construction in some manner, i.e., find the most economical or environmentally-

Chapter 4 – Structural Modelling
170
friendly design for a given performance level. Accurate performance prediction for
light-frame buildings under natural disaster loading is important to provide the
consistent and reasonable levels of safety expected by the building occupants, as well
as the affordability and efficiency demanded by society. This technology is also
needed to facilitate innovation in the light-frame construction industry, by allowing a
more flexible performance-based approach to the development of new building
products and systems. The critical underlying assumption behind the performance-
based approach, is that performance can be predicted with consistency and reasonable
accuracy.
To help address these issues, this project aims to develop a range of experimentally
validated numerical models of the simple L-shaped one-storey house presented in
Chapter 2, and predict the performance of this structure under earthquake loading,
both deterministically and in terms of response statistics.
In this chapter, a range of different modelling approaches and strategies, covering a
range of modelling sophistication, are examined and presented. All the structural
models that have been developed use modified Bouc-Wen hysteretic elements, to
incorporate the non-linear structural behaviour which inevitably occurs when a light-
frame structure is subject to an extreme seismic event. The modified Bouc-Wen
hysteretic element is described and formulated in Chapter 3.
This chapter begins with an overview of common seismic response analysis
techniques, and a review of structural modelling of light-frame structures. Next,
SDOF and shear-building models are discussed in relation to modelling light-frame
structural response to seismic loads. A hysteretic shear-building model, for
deterministic response analysis of multi-storey light-frame structures is then
presented, and an EQL scheme, for direct stochastic response analysis is formulated
for the hysteretic shear-building. Next, a ‘shear-wall’ model for light-frame structures
is presented, in which each wall is represented by a single hysteretic element, with the
walls connected together at the ceiling level by a rigid frame. A strategy for
modelling light-frame structures using sophisticated FE models is discussed and
finally, a hybrid approach to response analysis is presented, using both complex and
simple structural models, linked via system identification. The hybrid approach

Chapter 4 – Structural Modelling
171
facilitates the transition between global and local response predictions and between
the stochastic and deterministic domains.
4.2 Overview of Seismic Response Analysis
Techniques and Structural Modelling of Light-
Frame Structures
4.2.1 Background
Modelling of structural response to seismic loading involves the discretization of time
and space into a computable formulation. Structures are spatially continuous and
often complex in their form. Although continuous representations of very simple
structures are mathematically possible, complex systems are most easily and
practically analysed when discretized spatially in some manner. Three methods of
spatial discretization used in structural modelling are: 1) lumped-mass procedure; 2)
the method of generalised displacements; and 3) FE method; specific details of these
methods can be found in various textbooks (Clough and Penzien, 1993; Chopra 1995).
Seismic loading, and structural response to such loads is dynamic in nature, in the
sense that it is time-varying. This is important because most low rise light-frame
structures have a fundamental mode of vibration within the range of T=0.1 to T=1.0
seconds (Beck 2001, Foliente and Zacher 1994), which is similar to the range of
frequencies dominant in the spectral content of typical earthquakes. This is shown
graphically in Figure 4.1 where spectral densities of wind and earthquake loads are
compared with natural frequencies of common structures. This indicates that the
structural response of a light-frame structure could be amplified by resonance effects.
Because of this fact, seismic response analysis of light-frame structures must consider
the dynamic nature of the loads in some manner, and this usually involves some
means of temporal discretization. In contrast to this, the dynamic characteristics of
the load and response are not so important when considering wind loading, because

Chapter 4 – Structural Modelling
172
the spectral content of the wind is dominated by much lower frequencies than the
fundamental structural response and hence the response is essentially static.
Another important aspect in the seismic response analysis of light-frame structures is
the hysteresis relationship used to model the non-linear force-deformation behaviour.
In Chapters 2 and 3 it was highlighted that the components of light-frame structures
suffer degradation of strength and stiffness, under cyclic loading. This can result in
the dynamic characteristics of the structure (i.e. the natural frequency) changing
during an earthquake, which may shift the structural response towards resonance and
hence amplify the response. Seismic response analysis should therefore include
consideration of the cyclic degradation of the system properties, which may result
from the violent load reversals experienced by a structure during an earthquake. The
dynamic behaviour of timber structures is further complicated by the dependence of
the material properties to the rate and the duration of loading.
Figure 4.1 – Spectral densities of wind and earthquake loads, compared with natural frequencies of common structures (Ferry-Borges and Castanheta, 1971).
One of the biggest challenges in seismic response analysis, is dealing with the
uncertainties involved, and the associated variability in the response. There is
uncertainty due to the model representation of the real system, due to discretization,

Chapter 4 – Structural Modelling
173
parameter estimation and the assumed physical behaviour inherent in the model,
uncertainty due to the variability in the structural properties, and most importantly,
uncertainty due to the variability in the assumed excitation. Although significant in
magnitude, the uncertainty due to the modelling assumptions and the structural
properties is relatively much smaller than the uncertainty associated with the
earthquake loading used in the analysis. A structure that has been analysed based on
only one or two earthquake records may behave very differently when analysed under
an earthquake with different characteristics. Deterministic modelling cannot account
for these uncertainties, yet it is the treatment of these uncertainties, and particularly
uncertainty in the loading used in the analysis, which is probably the most important
aspect of seismic response analysis. Non-deterministic or stochastic methodologies
are essential in order to develop useful performance prediction tools for light-frame
buildings under natural disaster loading.
There are six main methods of seismic response analysis, which address the issues
raised above to varying degrees using different methodologies. The methods are :
• Static analysis
• Non-linear pushover analysis
• Time-history analysis
• Response- spectrum analysis
• Monte-Carlo simulation
• Random Vibration Analysis
Each of these methods is described briefly in the following sections, followed by a
review of the structural modelling of light-frame structures.
4.2.2 Static Analysis
Static analysis is the simplest method for analysing structural response to an
earthquake. It is the most commonly used method in design, since it forms the basis
of most seismic design codes. In this method, the structure is designed to resist a
static lateral force, which is assumed to be equivalent to the lateral force exerted by an
earthquake. The magnitude and distribution of the equivalent static lateral forces are

Chapter 4 – Structural Modelling
174
determined using an estimate of the fundamental period of the building and the mass
of the structure. The method assumes that the structural response is such that its
maximum deflected shape under earthquake loading is similar to the fundamental
mode shape, and that the mode shape may be approximated by a simple equation. In
effect the building is assumed to behave as a SDOF system. Various versions of this
procedure are used in different design codes around the world, but they are all based
on these same underlying assumptions. This approximate method is far too simplistic
to realistically predict structural response and as a result of this, has been constantly
refined in an attempt to address its limitations. The advantage of the method is of
course its simplicity, which is the main reason for its wide acceptance. The method
may be appropriate for simple regular buildings. For more complex buildings, it is
most useful at the preliminary analysis and design stage, before more sophisticated
analyses are conducted.
4.2.3 Pushover Analysis
Non-linear pushover analysis techniques are becoming increasingly popular in
earthquake response analysis in earthquake research and design. In this method an
increasing monotonic load is applied to a model of a structure which incorporates
non-linear elements. The structural model will typically contain linear beam and
column elements, with plastic hinges at pre-defined locations. The sequence of
formation of the plastic hinges and the critical global collapse mechanism are tracked,
and an estimate of the global lateral load-displacement relationship for the structure
can be obtained. The advantages and disadvantages of pushover analysis were
extensively examined by Krawinkler and Seneviratna (1998). This study
recommended these methods be used with care since they cannot represent the
dynamic nature of seismic structural response with a high degree of accuracy.
An extension to this method, originally developed by Freeman (1978) and elaborated
by Fajfar (1999), is known as the Capacity Spectrum Method and is described
graphically in Figure 4.2. In this method, the load-deformation relationship for the
structure is obtained from a non-linear pushover analysis and then plotted together
with the displacement demand spectrum, after conversion of the variables into

Chapter 4 – Structural Modelling
175
compatible forms. The displacement demand spectrum is derived from a response
spectrum (see section 4.2.5) for an earthquake with characteristics appropriate for the
building site. The point where the capacity diagram intersects the design spectrum is
known as the ‘demand point’, and is an estimate of the maximum displacement which
will be experienced by the structure under an earthquake with the characteristics
represented in the demand spectrum. Krawinkler (1995) pointed out that the inherent
natural frequency associated with this demand point may have little to do with the
dynamic response of the inelastic system. In essence, the limitations of this method
are that it is primarily based on a static analysis, although dynamic considerations are
included in the derivation of the site response spectrum, in a simplified form.
4.2.4 Time-History Analysis
In time-history analysis, the response of the structure under a specified acceleration
time-history is estimated, based on the equations of motion. Closed form solutions can
be obtained when the excitation can be described analytically but the responses are
typically computed using numerical time-stepping methods such as the Newmark-β
method (Newmark, 1959) or the Wilson-θ method (Wilson et al., 1973). These
methods are based on dynamic equilibrium using the equations of motion, where the
excitation and response are discretized in time. The complete time-history of the
response to a given excitation is calculated, and hence evaluations of peak responses
and crossings of various thresholds can be obtained. In this approach, the structural
model is formulated in terms of the equations of motion, so unlike response spectrum
or pushover methods, the dynamics of the problem are inherently considered. Non-
linearities including cyclic degradation and pinching can be included in the model,
and their effect on the dynamic response is therefore also included in the analysis.
Non-linear time-history analysis is the most accurate method for predicting seismic
responses, but for complex structures it can be very numerically intensive. The major
limitation of this method, as with all deterministic methods, is that the calculated
response is entirely dependent on the prescribed input function, which is usually
unknown. This problem can be addressed to some extent by the use of simulation
techniques (see section 4.2.6) but intense numerical computation is required.

Chapter 4 – Structural Modelling
176
Figure 4.2 – Capacity Spectrum method (Chopra and Goel, 1999).
Time-history analysis has been used widely by researchers, and has provided the
underlying basis and understanding used to develop and refine many of the simplified
analysis techniques. It is currently becoming more widely used in general earthquake
engineering practice as commercial analysis software packages now routinely include
time-history analysis functionality. Implementation of non-linear time-history
analysis functionality into commercial software is less common, but is increasing with
the increasing interest in, and availability of, various types of hysteretic elements
which can simulate non-linear behaviour.

Chapter 4 – Structural Modelling
177
4.2.5 Response Spectrum Analysis
In the response spectrum method, the maximum response of a structure to an
earthquake design spectrum is calculated directly, using an estimate of the structure’s
fundamental period and damping ratio. A response spectrum is obtained by plotting
the peak responses to an earthquake for different combinations of natural frequency
and damping ratio. The values of the peak responses are obtained from time-history
analyses of a SDOF oscillator. A response spectrum for the El-Centro ground motion
is shown in Figure 4.3 (a). To create a more practical spectrum for use by designers,
the process is then repeated for many different earthquake records, and the results are
averaged and smoothed into a design spectrum as shown in Figure 4.3 (b). The peak
pseudo-acceleration, pseudo-velocity or displacement demand, corresponding to the
estimated natural period of the building is taken directly from the design spectrum,
and can be compared with the structure’s capacity to resist that demand level. The
essence of this method, is that the dynamic analysis has already been performed for
the full range of possible structures, and a range of different earthquakes, using very
simple models, and then presented in a convenient format for use by practitioners.
The method can be extended to MDOF systems using modal combination methods
such as square-root-sum-of-squares or complete-quadratic-combination, although
these methods have no theoretical basis. Inelastic response can also be included
through the use of an inelastic design spectrum, as is also shown in Figure 4.3 (b). The
inelastic spectrum is a function of the assumed structural ductility, as well as the
natural period and damping. The inelastic response spectrum can be obtained from
time-history analysis of inelastic oscillators, or can be approximated based on the
elastic spectrum and a correction factor (Mahin and Bertero, 1981), although the
relationship between the elastic and inelastic spectrum is not clear. Full details of the
basic Response Spectrum Method can be found in most structural dynamics textbooks
(Clough and Penzien, 1993; Chopra 1995). The advantage of this method is that it is
as simple to use as a static analysis, but takes into account the basic vibrational
properties of the structure, such as natural period and damping, and also the dynamic
characteristics of the ground motion, which are used to derive the spectrum.

Chapter 4 – Structural Modelling
178
(a) Elastic response spectrum
(b) Elastic and inelastic design Spectrum
Figure 4.3 – Response Spectrum method (Chopra, 1995).

Chapter 4 – Structural Modelling
179
The main disadvantages stem from the fact that the design spectra are derived using
SDOF dynamic models, which often are too simple to accurately represent the
dynamic characteristics of real structures. The validity and accuracy of the use of
modal superposition techniques and inelastic design spectra (based on elastic values)
are also questionable.
4.2.6 Monte Carlo Simulation
A limitation of all of the above methods is that they are deterministic in nature,
whereas seismic response behaviour is essentially a non-deterministic or stochastic
phenomena. A structure that has been analysed based on only one or two earthquake
records may behave very differently when analysed under an earthquake with
different characteristics. This poses a problem because the purpose of seismic
response analysis is to predict responses to future unknown excitations. The
variability which is inherent due to the unknown nature of this excitation, is the
biggest contributor to the overall uncertainty of seismic response predictions. Other
sources of uncertainty stem from the modelling assumptions and discretization, and
the randomness of the material properties which determine the structural
characteristics. Sources of uncertainty in the analysis of structural response are
discussed in Melchers (1999).
Monte Carlo Simulation (MCS) is one method for dealing with these uncertainties,
and is based on repeated deterministic analyses, such as time-history analyses. MCS
techniques emerged in the 1960’s and 1970’s following the advent of digital
computers, which made it possible and practical to apply the technique. The basic
concepts of MCS are given in many texts, and are described in the context of
structural dynamics in a pioneering paper by Shinozuka (1972).
In MCS, the sources of uncertainty in the analysis are identified and quantified in
terms of statistical distributions of the model parameters or classes of excitations.
Parameter values and excitations are then sampled at random and deterministic
analyses are performed repeatedly. The output of these analyses can then be collated
and expressed as distributions of response quantities, such as peak displacement,

Chapter 4 – Structural Modelling
180
rather than as single deterministic values. Statistical distributions can then be fitted to
the responses so that the response quantities can be expressed in probabilistic terms.
Extreme values of a given response level, can then be associated with a given
probability level. MCS can be used to estimate the probabilities of exceedance of
different limiting states of structural response, or to study the contributions of various
sources of uncertainty to the overall variability of the response. The technique can be
applied to any system, so long as a deterministic model of the system is available.
The accuracy of the results of MCS depend on the accuracy of the model, the accurate
quantification of the statistical distributions associated with the model parameters, the
number of simulations performed, the generation of truly random numbers, and
importantly, in the accuracy in characterising the excitations. Unfortunately, real
ground motion records for particular sites are very scarce, and hence MCS techniques
usually depend on digitally simulated records, or on records from locations which are
judged to be appropriate. So practically speaking, MCS is only as good as the
simulated excitations which are used. MCS is rarely used by practitioners because it
is extremely computationally intensive, especially for complex structures. However
various importance sampling techniques, such as ‘Latin-Hypercube’ and ‘Russian
Roulette and Splitting’, have been developed to reduce the computational intensity.
These techniques are examined in Pradlwarter and Schueller (1999). As computer
power increases, and demand for more accurate analysis grows, MCS or similar
techniques are likely to become more commonly used in the future.
4.2.7 Random Vibration Analysis and Equivalent Linearisation
Random Vibration Analysis (RVA) was developed in the 1950’s in response to the
emergence of jet propelled aircraft. According to Roberts and Spanos (1990),
engineers discovered that they could not analyse complex phenomena, such as the
spatial and temporal variation of in-flight pressure on aircraft panels, using traditional
deterministic techniques. A new probabilistic approach was required which described
the excitations and responses in terms of statistical parameters rather than
deterministic values. The computers of the day were not capable of performing

Chapter 4 – Structural Modelling
181
significant simulation-based analyses (such as MCS), and so simplified stochastic
response analysis techniques were developed to calculate response statistics.
In RVA, excitations are modelled as stochastic processes, such as filtered white
noises or Poisson processes, and response statistics, such as the standard deviation of
the response, are solved for directly, without the need for simulation. Extreme values
of the response are related to the standard deviation (this is demonstrated in section
5.4), and can be calculated using various methods such as those developed by
Davenport (1964), Shinozuka et al. (1968) or Michaelov et al. (2001). One very
rough rule of thumb is to take the maximum value of the response as three times the
standard deviation. The basic concepts and methods of RVA are given in a number of
texts (eg, Yang 1986; Soong and Grigoriu 1993; Roberts and Spanos 1990). In the
RVA technique, the stochastic characteristics of the response can be directly related to
the stochastic characteristics of the excitation through the systems frequency response
function, provided the system is linear. However, for non-linear systems, exact
solutions are very difficult, and only exist for a very small class of systems. Because
of this limitation, approximate solutions have been developed. Approximate
solutions include Markov methods, perturbation and functional series methods,
moment closure techniques and EQL. These and other techniques are reviewed in
Spanos and Lutes (1986).
For seismic response analysis, which can be strongly non-linear, the EQL technique
has been widely used (Branstetter et al. 1988, Roberts and Spanos 1990) because it
gives reasonably good results (accurate to within 10-15%), even for strongly non-
linear systems, and can be implemented easily for MDOF systems (Cho, 2000). The
basic concept of EQL is outlined in Figure 4.4., where it is shown that a non-linear
system is replaced by a ‘statistically equivalent’ linear system. The ‘statistically
equivalent’ stiffness and damping parameters of a linear system are typically derived
by minimising the mean square error between the responses of the linear and non-
linear systems under random excitation. If the excitation for each of the systems is
assumed to be a random process, then the response difference, or ‘error’ between the
linear and non-linear system is also a random process. This error can be calculated
and minimised using stochastic formulations of the equations of motion.

Chapter 4 – Structural Modelling
182
nonlinearsystem
C K Z
mF(t)
nonlinearsystem
C K Z
mF(t)
‘statistically equivalent’linear system
Ce Ke
mF(t)
‘statistically equivalent’linear system
Ce Ke
mF(t)
Random VibrationAnalysis
Random VibrationAnalysis
EquivalentLinearisation
EquivalentLinearisation
µµµµ
Response Statistics
σσσσ
µµµµ
Response Statistics
σσσσ
Figure 4.4 – Equivalent Linearisation method.

Chapter 4 – Structural Modelling
183
The resulting ‘statistically equivalent’ linear system is then used for RVA, and the
response statistics of this system are computed. Full details of the general procedure
of EQL are given in textbooks on random vibration such as Soong and Grigoriu
(1993), Roberts and Spanos (1990) and Cho (2000).
The EQL technique is an approximate alternative to MCS for calculating response
statistics of a non-linear structure under random excitation. However MCS is
becoming more and more practicable, due to the rapid and continuing increase in
computational power. Even if MCS becomes widely used in practice in the future,
simplified techniques for stochastic response analysis will still be required for
analysing complex structures with many degrees of freedom, and for preliminary
assessment of structural response statistics in lieu of simulation.
4.2.8 Whole-Building Models of Light-Frame Structures.
In the preceding sections, different seismic response analysis techniques and
methodologies have been outlined. Each of these methodologies requires some kind
of structural model to predict response to a prescribed input. The structural model is
defined here as the discretized mathematical representation of the mass, damping,
stiffness and hysteretic characteristics of the structure, used to numerically calculate
responses to a given loading.
The complexity of a structural model should be chosen according to the objectives of
the analysis, and the computational requirements of the response analysis technique
which is used. The choice of model complexity is important in the seismic response
analysis of light-frame structures, because real light-frame structures are highly
complex, highly redundant systems, which can be difficult to discretize or simplify
meaningfully. A range of whole-building models with varying degrees of complexity
and analysis capabilities, have been developed for light-frame structures. Models for
static analysis (predominantly) have been developed in studies by Gupta and Kuo
(1987), Yoon (1991), Schmidt and Moody (1989), Kasal (1992), Gad (1997), He et
al. (2001), Koerner et al. (2000) and Andreasson (2000). Models for dynamic

Chapter 4 – Structural Modelling
184
analysis have been developed by Gad (1997), Ceccotti et al. (2000) and Fischer et al.
(2001). These models are reviewed in the following.
Static Analysis Models
The models selected for review below, have been developed predominantly for static
analysis, and are only suitable for seismic response analysis using either static or
pushover techniques (see sections 4.2.2 and 4.2.3).
Gupta and Kuo (1987) and Kuo (1989) developed a whole-building model to analyse
the house tested by Tuomi and McCutcheon (1974) (see section 2.2.3). The house
model was constructed from simple elastic shear-wall elements which included uplift
and racking deformations. They were able to predict the experimental results with
reasonable accuracy but were not capable of predicting non-linear behaviour. Yoon
(1991), extended this model to include non-linear behaviour, and also analysed the
house tested by Tuomi and McCutcheon (1974).
Schmidt and Moody (1989) developed a three-dimensional model assembled from
simplified shear-wall representations, which incorporated non-linear fasteners,
connected together through rigid roof and floor diaphragms. The model was used to
predict the behaviour of the house tested by Tuomi and McCutcheon (1974) (see
section 2.2.3).
Kasal (1992) developed a three-dimensional FE model based on the ANSYS FE
software. The three-dimensional model was used to evaluate load-sharing in a full
structure, based on the full-scale experiments on a simple box-style house by Phillips
(1990). In a similar fashion, the experiments described in Chapter 2 of this thesis are
to be used to validate the FE models by Kasal (1992) and study the load-sharing, but
for a ‘real’ house with irregular plan layout and different wall configurations. More
details of this FE model are given in section 4.6.
Gad (1997) developed FE models, similar to those developed by Kasal (1992) for a
one-roomed brick-veneer house that he had tested (see section 2.2.3). The FE models
were formulated with static analysis in mind, and were validated using the results of

Chapter 4 – Structural Modelling
185
racking tests. The models were then used to study the sensitivity of the racking
response to different boundary conditions and structural configurations.
Koerner et al. (2000) developed a three-dimensional FE model of the manufactured
house tested by Richins et al. (2000) under simulated wind loads. Full composite
behaviour of the timber-frame and the OSB sheathing panels was assumed and hence
all walls and diaphragms were modelled using orthotropic shell elements. Inelastic
‘link elements’ were used to model the connections between the sub-assemblies. The
model was verified using the results of static experiments conducted on the house (see
section 2.2.3) and was used to demonstrate the importance of boundary conditions on
the predicted global displacements. Due to the complexity of this type of model, it is
best suited to static analyses, or limited dynamic analyses.
He et al. (2001) developed a non-linear FE model for light-frame timber buildings,
which implemented a mechanics-based hysteresis element (Foschi, 2000) to represent
individual sheathing to frame connections. The model uses the basic material
properties, and the load-deformation characteristics of the connectors as the input
parameters. The model was verified using the results of individual wall-tests and then
used to examine the three-dimensional response of eccentric structures. This model is
capable of predicting individual nail response within a three-dimensional building,
and is therefore quite complex, and is at the moment, most appropriate for static
analyses only.
Andreasson (2000) developed FE models of multi-storey timber-frame buildings
using the ANSYS FE software. Linear isotropic beam and shell elements were used
to model the framing and sheathing elements, respectively, and non-linear-elastic
springs were used to model the connections within and between diaphragms. The
models were validated and calibrated based on a program of racking tests on different
configurations of shear-walls, and small specimen connection tests. The calibrated FE
model was then used to investigate the interaction between the various structural sub-
assemblies and the load-sharing under static loading, and it was shown that load
distribution is mainly influenced by the inter-component connections. No cyclic or
dynamic loading effects were considered in this study. The FE model did not include

Chapter 4 – Structural Modelling
186
elements which incorporate inelastic hysteretic behaviour, and are therefore only
suitable for monotonic static analyses of light-frame structures.
Dynamic Analysis Models
The models reviewed below have been developed predominantly for seismic response
analyses using time-history analysis techniques (see section 4.2.4). The models by
Gad (1997) and Fischer et al. (2001) may also be appropriate for limited simulation
studies (see section 4.2.6), due to their relative simplicity.
The model developed by Gad (1997), is a simplified model for dynamic analysis of a
single-room brick-veneer house using RUAMOKO (Carr, 1998). The model used the
Stewart model of hysteresis (Stewart, 1987) to represent the in-plane hysteretic
behaviour of the in-plane walls. The mass associated with the bricks in the out-of-
plane walls was also included in the model, as it significantly affects the dynamic
response in a brick-veneer structure. The model was verified using the results of
shake-table and swept-frequency dynamic tests (Gad, 1997). The model was used for
sensitivity analyses, and to determine the extra loading which is imposed on the
structural frame during an earthquake, by the out-of plane brick-veneer walls.
Ceccotti et al. (2000) developed a more detailed whole-building model for dynamic
analysis, using the DRAIN-3D software. In their approach, individual walls of the
light-frame structure are represented by equivalent frames with semi-rigid joints. The
frames are then connected together with braced diaphragms with equivalent
characteristics to the floor system. A ‘Florence’ pinching hysteresis model (Ceccotti
and Vignoli, 1989) is used for the semi-rigid connections in the equivalent frames.
The hysteresis parameters for the equivalent frames were determined from individual
wall tests. The model was used to perform time-history response analyses of a multi-
storey timber frame building under various historical earthquakes, and to determine
the effect of diaphragm flexibility on seismic performance.
A simpler whole-building model for dynamic analysis has been developed by Fischer
et al. (2001), as part of the CUREE-Caltech Woodframe project (Hall, 2000). In their
‘pancake’ model, which is implemented using RUAMOKO (Carr, 1998), each of the

Chapter 4 – Structural Modelling
187
walls of a two-storey box-type timber frame structure are represented by zero-length
hysteretic springs which use the Stewart (1987) model of hysteresis. The contribution
of the out-of-plane walls is ignored. The roof diaphragm is modelled using plate
elements, and the floor diaphragm is modelled using a combination of plate and beam
elements. The model was used to predict the results of shake-table tests conducted on
a full-scale two-storey timber-frame house (Fischer et al., 2001) (see section 2.2.3).
Six other dynamic analysis models, of varying complexity, were also developed to
predict the results of the testing by Fischer et al. (2001) as part of an international
benchmarking exercise, sponsored by the CUREE project. The objective of the
exercise was to assess the state-of-the-art numerical analytical models in blind
predicting the inelastic seismic response, measured during shake-table tests. Details of
the results of the models and the outcomes can be found in the proceedings of a
workshop on the exercise (CUREE, 2001). Most of the participants used some form
of hybrid modelling approach (see section 4.7), where detailed models were used to
characterise individual wall behaviour, and simpler models used to predict dynamic
response. The model presented by Ceccotti et al. (2000), which is described above,
was most successful in predicting the dynamic response.
4.2.9 Scope of Structural Modelling and Seismic Response Analysis in
Current Work
The previous sections have provided an overview of a variety of structural modelling
and seismic response analysis techniques, which range from the conceptually and
computationally simple to the conceptually complex and computationally intensive.
Each model and method has advantages and disadvantages and the choice of method
of-course depends on the analysis objectives (Seible and Kingsley 1991; Foliente
1997a). In the following sections of this chapter, different structural models,
appropriate for the analysis of the dynamic seismic response (deterministic and
stochastic) of light-frame structures, are discussed, developed and presented. Five
types of models are developed or examined:
1. SDOF model – section 4.3
2. Shear-Building model – section 4.4

Chapter 4 – Structural Modelling
188
3. Shear-Wall Model – section 4.5
4. Finite-Element Model – section 4.6
5. Hybrid Approach – section 4.7
The analysis capabilities of these modelling strategies are summarised in Table 4.1.
The shear-building, and shear-wall models were developed by the author, specifically
for this work, as was the stochastic EQL scheme for the shear-building model. The
models incorporate the modified Bouc-Wen differential model of hysteresis
(described in Chapter 3) to account for inelastic structural behaviour and are used for
seismic response analysis in Chapter 5. This includes analysis of the test house
described in Chapter 2, and an example three-storey building. The FE and hybrid
modelling strategies are introduced, so as to put some of the broader goals of this
project into context, but they are not used in this work.
Table 4.1 Analysis capabilities for different modelling strategies
Model Input/Output Resolution Analysis Capabilities
SDOF /
Shear-Building - global only
- static
- dynamic
- probabilistic
Shear-Wall - global
- sub-assembly level
- static
- dynamic
- limited probabilistic
Finite-Element
- global
- wall level
- panel / Member level
- connector level
- static
- limited dynamic
- limited probabilistic
Hybrid
- global
- wall level
- panel / Member level
- connector level
- static
- dynamic
- probabilistic

Chapter 4 – Structural Modelling
189
4.3 SDOF model
4.3.1 Background
A SDOF model is the simplest possible model of a structure which can be used for
seismic response analysis. The dynamic behaviour of a SDOF system is limited to
first mode responses and global behaviour only. Very few real structures are
accurately modelled as SDOF systems. Since light-frame structures are
predominantly low-rise, with relatively high natural frequencies of vibration, the
majority of the response contribution is usually from the fundamental racking mode.
A SDOF approximation is therefore sometimes a reasonable assumption when
determining global responses. In the dynamic impact testing in Chapter 2, it was
shown that the test house can be reasonably approximated as a SDOF model, with all
mass lumped at the ceiling level. The SDOF model is useful for obtaining a basic
understanding about how the dynamic and global hysteretic characteristics affect the
global response of a light-frame structure, however no information about local
responses or failure mechanisms can be obtained. The SDOF modelling approach has
been used widely in many different applications by researchers. The results of these
studies have provided many valuable insights into structural behaviour under seismic
loads, and have laid the foundation knowledge for the development of simplified
design and analysis techniques such as the Response Spectrum Analysis method.
4.3.2 Formulation
Consider the hysteretic SDOF model shown schematically in Figure 3.12. In physical
terms, this model may be considered to be a structure with a lumped mass
concentrated at the roof level, and a massless lateral load resisting structure
underneath consisting of a non-linear and a linear-elastic spring in parallel with a
viscous damper. This particular SDOF idealisation is implemented in Chapter 3 using
the modified Bouc-Wen hysteretic force-displacement relation for the non-linear
spring. The equation of motion for this system is outlined in detail in section 3.4, and
this is the formulation for the SDOF hysteretic model for non-linear time-history

Chapter 4 – Structural Modelling
190
analysis. The dynamic response history for this system, for a prescribed input
function can be solved by using a numerical solution technique for solving the
equation of motion, such as the Wilson-θ method (Wilson et al., 1973). The equations
can also be formulated in a state vector format, which reduces the problem to a series
of ordinary differential equations (ODEs), which are then solved using a numerical
technique appropriate for solving stiff sets of first order equations such as the
predictor-corrector method. The SDOF hysteretic model formulated in section 3.4,
has been implemented in a computer program. In Chapter 5, it is used for seismic
response analysis of the single-storey L-shaped house described earlier.
4.3.3 Equivalent Linearisation of SDOF model
One of the major advantages that the modified Bouc-Wen hysteresis model has over
other models of hysteresis, is that it is mathematically tractable for approximate RVA
using the EQL technique. The basic concepts of RVA and EQL are outlined in section
4.2.7. In short, EQL is a fast method to calculate response statistics to an input
function described as a stochastic process, without the need to use MCS (see section
4.2.6).
Wen (1976) first formulated an EQL scheme for the differential hysteresis model
proposed by Bouc (1967), which is the ancestor of the hysteresis model used
extensively in this work. Baber and Wen (1981) enhanced the differential model to
include stiffness and strength degradation and extended it to MDOF systems while
maintaining the EQL capabilities. Then Baber and Noori (1986), and Foliente (1993)
added pinching capability whilst maintaining its tractability for EQL, but for SDOF
systems only. Details of the EQL scheme for the SDOF model outlined in section 3.4
and are given in Foliente (1993) and Foliente et al. (1996). This scheme for the
SDOF model, has been implemented in a computer program. In Chapter 5, it is used
for stochastic seismic response analysis, of the single-storey L-shaped test house
described in Chapter 2. The results are compared with those calculated using MCS.

Chapter 4 – Structural Modelling
191
4.3.4 Extension of SDOF Model to MDOF Systems.
In this work, the modified Bouc-Wen hysteretic SDOF model developed by Foliente
(1993), is extended to a MDOF shear-building and shear-wall type model, which are
presented in sections 4.4 and 4.5, respectively. The EQL scheme is also extended to
MDOF systems and is formulated and presented for the shear-building model in
section 4.4.
4.4 Hysteretic Shear-Building Model
4.4.1 Background
The previous section in this chapter outlined a hysteretic SDOF model for non-linear
dynamic response analysis of light-frame structures. This approach may be suitable
for analysis of the global response of low-rise light-frame construction, but will not be
suitable for taller structures with multiple levels, especially if the mass and/or stiffness
distribution is not uniform over the height of the structure. A simple and practical
MDOF model which may be more appropriate for multi-storey construction is the
shear-beam or shear-building lumped mass model. In this approach, the total mass of
the structure is assumed to be lumped at the floor or roof level, and the floor and
ceiling diaphragms are assumed to be infinitely rigid compared to the shear-walls.
The relative lateral deformation between the levels in the structure is the only
deformation considered, and hence the lateral stiffness of the shear-walls at each
level, are also lumped into a single element. This approach has similar limitations to
the SDOF model discussed earlier. It is not suitable for modelling of structures which
are torsionally sensitive as no torsional response is included, and only the global
response of each level in the structure is obtainable. Later in this chapter, a hybrid
response analysis technique is outlined in which local responses can be obtained by
linking simple and detailed models through system identification. Although quite a
crude modelling approach, the shear-building model is better than the SDOF model
for characterising the behaviour of multi-storey light-frame construction, especially if
the distribution of mass and/or stiffness is not uniform over the height of the structure.
If this is the case, then vibration modes other than the fundamental mode can

Chapter 4 – Structural Modelling
192
significantly contribute to the overall response, and this should be taken into account
in the modelling. Since many light-frame structures have car-parking areas in the
lower-floor, with large openings in the lower-storey walls, a non uniform distribution
of mass and stiffness is quite possible. Structures with this configuration were found
to be prone to collapse or severe damage during the Northridge earthquake (Hall,
1996; Andreason and Rose, 1994) and hence models for seismic response analysis
should have some means of accounting for it.
4.4.2 Matrix Formulation
Generally, a shear-building model may have up to r degrees of freedom, each
representing the mass and stiffness characteristics of one floor (or a group of floors) in
a building. Consider the general model of a shear-building shown in Figure 4.5
where: xi is the displacement of the ith mass with respect to the ground; ui = xi - xi-1 is
the relative displacement between each floor; and giAi xxx ������ += is the absolute
acceleration of the ith mass under a ground acceleration gx��
The total restoring force of the ith mass is therefore given by
iiiiiiiiiii zkxxkxxcQ )1()()( 11 αα −+−+−= −−�� (4.1)
or in terms of ui
iiiiiiiii zkukucQ )1( αα −++= � (4.2)
Using D'Alembert's principle, the equation of motion is obtained as
01 =−+ +iiAii QQxm �� (4.3)
substituting for Aix�� , Qi and Qi+1 and then rearranging,

Chapter 4 – Structural Modelling
193
m2
mr
mr-1
x1
x2
xr-1
xr
m1
ur
f t( )
(a) r DOF shear-building
m ui i��
( )1-a i i ik zc ui i�
( )1 1 1 1-+ + +
a i i ik z c ui i+ +1 1�
a i i ik u+ + +1 1 1
a i i ik u
mi
(b) Forces acting on the i-th mass
Figure 4.5 – Shear-building model.

Chapter 4 – Structural Modelling
194
1111 )( +++− −++− iiiiiiiii xcxccxcxm �����
11111111 )( +++++− −++− iiiiiiiii xkxkkxk αααα
giiiiiii xmzkzk ��−=−−−+ +++ 111)1()1( αα
(4.4)
where i = 1, 2, .....r. Assemblage of the equations of motion for all r degrees of
freedom results in the following matrix formulation of the shear-building model
ˆ[ ]{ } [ ]{ } [ ]{ } [ ]{ } [ ]{ } gM X C X K X H Z M I xα α+ + + = −�� � �� (4.5)
where {X} is the absolute displacement vector (relative to ground), {Z} is the relative
hysteretic displacement vector (relative to the floor below) and ˆ{ }I is the influence
vector (all entries are 1 for seismic excitation).
The hysteretic displacement, zi of the ith mass is related to the relative displacement
between floors, ui, through the hysteretic law that was described earlier, but in MDOF
form.
+−
=−
i
niiii
niiiii
iiii zuzzuuA
zhzη
γβν )()(
1����
� (4.6)
The hysteresis model parameters are defined for each element:
]sgn[1
22
2
e0.1)( iiuiiii
ζ/)zq)u((zizh −−−= �ζ (4.7)
]0.1[)( )(1
iipisii e εζεζ −−= (4.8)
))(()( 12 iii iioii ζλεδψεζ ψ ++= (4.9)
iii iεδεν ν+= 0.1)( (4.10)
iii iεδεη η+= 0.1)( (4.11)
0
ft
i i itz u dtε = ∫ � (4.12)

Chapter 4 – Structural Modelling
195
1/
( )
ini
uii i i
AZν β γ
= + (4.13)
Note that ui = xi - xi-1 and i = 1, 2, ..., r. All symbols are described in Table 3.1
All the matrices in Eq. 4.5 have dimension (r x r). [M] is the diagonal mass matrix
and [C] is the damping matrix with the following nonzero entries:
1 2 2
2 2 3 3
1 1
( )( )
[ ]( )n n n n
n n
c c cc c c c
Cc c c c
c c− −
+ − − + − = − + − −
� � � (4.14)
where iooi mc ωξ2= .
The [Kα] matrix contains the linear component of the structure stiffness and has the
following nonzero entries:
−
−+−
−+−
−+
=
−−αα
αααα
αααα
ααα
α
nn
nnnnkkkkkk
kkkkkkk
K)(
)()(
][
11
3322
221
��� (4.15)
where iii kk αα = .
The [Hα] matrix contains the hysteretic elements (the non-linear components) and has
the following nonzero entries:

Chapter 4 – Structural Modelling
196
−
−
−
=
−α
αα
αα
αα
α
n
nnhhh
hhhh
H
1
32
21
][ �� (4.16)
where iii kh )1( αα −= .
As for the SDOF model presented earlier, the hysteretic shear-building model has
been implemented in a computer program, The dynamic response history for this
system, for a given excitation is solved for by using the Wilson-θ method (Wilson et
al., 1973), which is a generic method for solving the equations of motion for non-
linear systems. The model is used for seismic response analysis of an example three-
storey light-frame structure in Chapter 5.
4.3.4 State Vector Formulation
In order to formulate an EQL scheme for the MDOF hysteretic shear-building model,
it is necessary to represent the system equations in a state vector format, which
reduces the problem to a series of ODEs.
Consider the state vector {Y}
=
=
i
i
i
i
i
i
zuu
yyy
Y �
,3
,2
,1}{ (4.17)
The time derivative, { �}Y results in a set of 3xr ODEs
� , ,y yi i1 2= (4.18)

Chapter 4 – Structural Modelling
197
�
( ) ( ) ( )
(
, , , ,
, , ,
, ,
y km
y km
km
y km
y
cm
y cm
cm
y cm
y
km
y km
km
y
ii i
ii
i i
i
i i
ii
i i
ii
i
ii
i
i
i
ii
i
ii
i i
ii
i i
i
i i
ii
i
21 1
11 1
11
1 11 1
1
12 1
12
12 1
1 1
13 1
13
1 1 1
1
= + − +FHG
IKJ +
+ − +FHG
IKJ +
+ − − − + −FHG
IKJ
+ −
− −
−−
−
+ ++
−
−−
−
++
− −
−−
−
α α α α
α α α
α + ++ −1 1
3 1 1) ( ),k
my f ti
ii iδ
(4.19)
� ( )( )
,, , , , , ,y h z
y y y y y yi i
i i i i in
i i i in
i
i i
32 2 3
13 2 3=
− +RS|T|
UV|W|
−ν β γη
(4.20)
where δ i1 is a Kronecker delta (i.e. δ ir =1 when i = r, 0 otherwise)
The 3xr first order equations completely define the shear-building model, and can be
solved simultaneously using a range of techniques for solving systems of ODEs, such
as ‘predictor-corrector’ methods. The formulation above results in a 'stiff' set of
equations in which some of the equations have orders of magnitude more significance
on the solution than others. Stiff sets of equations are not suitably solved by Runge-
Kutta or Taylor's series methods (which are commonly used methods for solving
ODEs) because very high order derivatives are required for an accurate solution. This
formulation of the hysteretic shear-building model has also been implemented in a
computer program, the dynamic response history for this system, for a given
excitation is solved by using an Adams-Bashforth-Moulton predictor-corrector
method. Full details of the method, including the theoretical basis can be found in
Khon (1987). The shear-building model is used for seismic response analysis of an
example three-storey light-frame structure in Chapter 5.
4.4.4 Equivalent Linearisation of Hysteretic Shear-Building Model
In the following section, the EQL scheme, developed by Foliente (1993) and Foliente
et al. (1996), for the SDOF modified Bouc-Wen hysteretic model, is extended to the
MDOF hysteretic shear-building system presented above.

Chapter 4 – Structural Modelling
198
Consider the state vector formulation of the shear-building model, from the previous
section given by Equations 4.17 to 4.20.
If the hysteretic relationship in Equation 4.20 is replaced by its linear equivalent
� , , ,y C y K yi e i e i3 3 2 3 3= + (4.21)
where Ce3 and Ke3 are statistical linearisation coefficients for the damping and
stiffness terms, respectively, then the governing ODEs for the linearised MDOF
system can be rewritten in matrix form as
fGYY +=� (4.22)
where
=][][]0[][][][
]0[][]0[
33
***
ee KCHCK
IG (3r x 3r) (4.23)
=}0{)(}0{
1tff (3r x 1) (4.24)
and
=
0
0)( 1
�
�� gx
tf (r x 1) (4.25)
All sub-matrices of G have dimension (r x r), [I] is the identity matrix and [0] is the
null matrix, [K*], [C*], [H*], [Ce3] and [Ke3] are given below

Chapter 4 – Structural Modelling
199
+−+
+
+−+
+
+−+
+−
=
−−
−
+
−−
−
11
1
1
11
1
2
3
1
2
2
2
1
1
1
2
1
1
* ][
n
n
n
n
n
n
n
n
n
n
n
n
n
n
mk
mk
mk
mk
mk
mk
mk
mk
mk
mk
mk
mk
mk
K
ααα
αααα
αααα
αα
���
(4.26)
where iii kk α=
+−+
+
+−+
+
+−+
+−
=
−−
−
+
−−
−
11
1
1
11
1
2
3
1
2
2
2
1
1
1
2
1
1
* ][
n
n
n
n
n
n
n
n
n
n
n
n
n
n
mc
mc
mc
mc
mc
mc
mc
mc
mc
mc
mc
mc
mc
C ���
(4.27)
+−+
+
+−+
+
+−+
+−
=
−−
−
+
−−
−
11
1
1
11
1
2
3
1
2
2
2
1
1
1
2
1
1
*][
n
n
n
n
n
n
n
n
n
n
n
n
n
n
mh
mh
mh
mh
mh
mh
mh
mh
mh
mh
mh
mh
mh
H
ααα
αααα
αααα
αα
���
(4.28)
where iii kh )1( α−=

Chapter 4 – Structural Modelling
200
=
ne
e
e
e
C
CC
C
,3
2,3
1,3
3�
(4.29)
=
ne
e
e
e
K
KK
K
,3
2,3
1,3
3�
(4.30)
The equations used to calculate the linearisation coefficients Ce3 and Ke3 for each
DOF are given in Appendix D.
If the matrix equation for Y� (Eq. 4.22) is post multiplied by TY , the expectation
values of the terms are taken and the resulting equation is added to its transpose, this
results in the covariance equation for the zero-mean time lag covariance matrix
][ TYYES = .
BSGGSS T ++=� (4.31)
where
=
z
zuu
uzuuu
EEEEEE
S ��
�
(3r x 3r) (4.32)
and
][ TT YffYEB += (3r x 3r) (4.33)
If the forcing function f(t)1 is a zero mean Gaussian white noise with constant power
spectral density S0 then B has only one nonzero term and can be written as
0)1)(1( 2 SB rr πδ ++= (4.34)

Chapter 4 – Structural Modelling
201
where irδ is a Kronecker delta (i.e. δ ir =1 when i = r, 0 otherwise).
The sub-matrices of S are all of dimension (r x r) and contain the system response
statistics in their diagonal terms. These are found by numerical integration of the
covariance equation (Eq. 4.31) to solve for the zero mean time lag covariance matrix
(S).
=
][
][][
2,1
22,1
21,1
n
u
yE
yEyE
E�
(4.35)
=
][
][][
2,2
22,2
21,2
n
u
yE
yEyE
E�
� (4.36)
=
][
][][
2,3
22,3
21,3
n
z
yE
yEyE
E�
(4.37)
=
][
][][
,2,1
2,22,1
1,21,1
nn
uu
yyE
yyEyyE
E�
� (4.38)
=
][
][][
,3,1
2,32,1
1,31,1
nn
uz
yyE
yyEyyE
E�
(4.39)

Chapter 4 – Structural Modelling
202
=
][
][][
,3,2
2,32,2
1,31,2
nn
zu
yyE
yyEyyE
E�
� (4.40)
The mean square response statistics of the ith degree-of-freedom are then given by
][ 2,1
2,1
2, iiiu yE== σσ (4.41)
][ 2,2
2,2
2, iiiu yE== σσ � (4.42)
][ 2,3
2,3
2, iiiz yE== σσ (4.43)
The EQL scheme for the hysteretic shear-building model has been implemented in a
computer program. In Chapter 5, it is used to calculate the response statistics of an
example three-storey light-frame building. The response statistics are compared with
those calculated using MCS.
4.5 Hysteretic Shear-Wall Model
4.5.1 Background
The previous two models presented in this chapter (SDOF and shear-building) are
formulated for prediction of global response quantities only, and do not consider any
torsional or bi-directional components of the response. Excitations and responses are
considered for one direction only. The main drawback with this approach is that no
insight can be gained into the response of the individual components of the light-
frame structure under an earthquake. The local response of the structure’s major
components, such as its walls and its ceiling and roof diaphragms, are of interest in a
seismic analysis, since it is the most highly stressed or deformed components which
are critical when assessing a given structural configuration for its behaviour during an
earthquake.

Chapter 4 – Structural Modelling
203
A simple and practical MDOF model which provides some insight into the response
of individual walls in a light-frame structure, and considers the bi-directional nature of
ground excitations and responses, is the shear-wall model which is shown
diagrammatically in Figure 4.6. In this approach, the in-plane characteristics of each
of the walls in the structure are represented by a single modified Bouc-Wen hysteretic
element for each wall. Out-of-plane stiffness of the walls is assumed to be negligible
and is not considered. The walls are connected together at the ceiling level by a rigid
or semi-rigid elastic frame, which is configured in accordance with the plan layout of
the structure. The properties of this frame can be adjusted to represent the stiffness of
the entire roof and ceiling diaphragm. Alternatively, a braced truss configuration or a
plate element configuration (as in Fischer et al., 2001), or a combination of these
could be employed to represent the roof system, depending on the structural
configuration and the objectives of the analysis. In this work, the ceiling level
diaphragm is assumed to be rigid compared to the walls and is modelled as a rigid
frame. The racking deformation of each of the walls is the only deformation
considered, and is identical at either end of the wall, hence the in-plane stiffness of
each of the shear-walls can be represented by a single element.
The approach used herein, as shown in Figure 4.6, is sufficiently sophisticated for
response prediction at the wall level, and is still simple enough to be appropriate for
small-scale simulation-based stochastic response studies, provided that the number of
simulations required is not too large. Responses of individual nails, screws, bolts or
plate connectors can be approximated from the wall responses, or can be directly
determined from more sophisticated FE models of light-frame structures (as described
in sections 4.2 and 4.6), and from hybrid analyses (as described in section 4.7).
4.5.2 Formulation
The shear-wall model formulation and solution for non-linear dynamic analysis is
similar to that for the shear-building model given in section 4.4. The structural
matrices are assembled for the idealised shear-wall configuration shown in Figure 4.6.

Chapter 4 – Structural Modelling
204
All walls modelled as single hysteretic springs with
modified Bouc-Wen hysteresis
Internal X-Walls lumped into single element
Rigid elastic frame for ceiling and roof diaphragm
(a) Box-type representation
W1 W3 W4
W5
W678
W9
N
S
EW
N
S
EWZero –length hysteretic spring elements with modified Bouc-Wen
hysteresis
Rigid Elastic Frame
W2
X
YZ
X
YZ
(b) Planar representation
Figure 4.6 – Shear-wall model.

Chapter 4 – Structural Modelling
205
The system stiffness and hysteretic matrices, [K] and [H], are cumbersome to define
analytically in general terms, and are assembled numerically, using a FE approach,
but could also be assembled using any other appropriate method such as the direct
stiffness method. Full details of the various structural analysis techniques and
associated matrix methods can be found in structural analysis textbooks such as
Holzer (1985). Only the hysteretic springs used for each of the walls in the house
require hysteretic parameters assigned to them, all other elements are elastic. The
mass matrix is assumed to be diagonal, with the masses lumped at the nodes which
are at the intersection points of the rigid ceiling frame. The damping matrix is based
on an assumption of Rayleigh damping, with 5% equivalent viscous damping in the
first two modes.
As for the SDOF and shear-building models, the hysteretic shear-wall model has been
implemented in a computer program, and its dynamic response history is calculated
using the Wilson-θ method (Wilson et al., 1973). In Chapter 5, it is used for seismic
response analysis of the single-storey L-shaped house described in Chapter 2.
4.6 Finite Element Model
The strategies for seismic response analysis of light-frame structures presented in this
chapter so far have focussed on predicting the response of the entire structure, or of a
significant sub-system of the structure such as its shear-walls. None of these models
can directly predict failure mechanisms in individual components. Responses of
individual nails, screws, bolts or plate connectors can be approximated from the
global structural or wall responses, but can only be determined directly from more
sophisticated FE models.
Kasal (1992) and Kasal et al. (1994) developed a three-dimensional FE model using
the ANSYS FE software. This model will be verified using the results of the full-
scale testing described in Chapter 2, in a separate study. The FE modelling strategy
used is outlined here to give the reader an appreciation of the wider project goals.

Chapter 4 – Structural Modelling
206
The FE model by Kasal (1992) utilises a hybrid modelling strategy, where individual
walls are modelled separately in fine detail. The detailed individual wall models
include elements to represent individual members, sheathing panels, and hysteretic
elements to represent sheathing to frame connections. The hysteretic elements are
load-history dependent and include stress and stiffness degradation (Kasal and Xu,
1997), and have been incorporated into the ANSYS FE software. The detailed wall
models are then reduced into a simplified form, using system identification, where a
single hysteretic spring is used to represent the in-plane wall behaviour. The
simplified and detailed wall models are shown in Figures 4.7 (a) and (b), respectively.
The simplified wall elements are then assembled into three-dimensional models,
reducing the number of degrees-of-freedom significantly. The roof and ceiling
diaphragms are modeled using equivalent elastic plate and bracing elements. The
simplified wall elements are then connected together, and to the diaphragms with non-
linear hysteretic springs. The three dimensional model is shown in Figure 4.7 (c)
This type of model can be used to study load-sharing/interaction and distribution
between the structural sub-systems, and to track the formation of local failure
mechanisms in individual components. This particular model has been used
previously to evaluate load-sharing in a full structure (Kasal, 1992), based on the full-
scale experiments on a simple box-style house by Phillips (1990). In a similar
fashion, the experiments described in Chapter 2 of this thesis are to be used to validate
the FE models, and study the load-sharing, but for a ‘real’ house with irregular plan
layout and different wall configurations. The model will primarily be validated
against the measured displaced shapes and distributions of reaction forces under static
and cyclic loading, to verify its ability to predict the load paths within light-frame
structures under wind and earthquake loading.
Although FE models are powerful in their response analysis capabilities, most have
only been used for static analysis due to their complexity. Because of the reduced
degrees-of-freedom in Kasal's (1992) three-dimensional model, it may be suitable for
limited deterministic dynamic analyses, however the model is still too complex for
significant simulation analyses to be performed directly. In section 4.7, a hybrid
modelling approach, which can be used to integrate deterministic FE models and
simplified stochastic response analysis models is described.

Chapter 4 – Structural Modelling
207
Nonlinear springsfor individual sheathing to frame connectors
Sheathing:plate elements
Framing:plate elements
(a) Detailed FE model of stud wall (Kasal, 1992)
(b) Equivalent simplified FE representation of stud wall (Kasal, 1992)
Figure 4.7 – FE model of house.

Chapter 4 – Structural Modelling
208
Equivalent simplified wall FE sub-assembies
Roof and ceiling diaphragm:plate elements
(c) Three-dimensional Finite-Element model of the test house
Figure 4.7 (cont’d) – FE model of house.
4.7 Hybrid Response Analysis
4.7.1 Background
So far in this chapter, a range of structural models of light-frame structures, covering
the full spectrum of sophistication, from SDOF to FE models, have been presented.
The choice of an appropriate model for static and/or dynamic analysis may vary from
one analysis to another due to different objectives (Seible and Kingsley 1991; Foliente
1997a).

Chapter 4 – Structural Modelling
209
Ideally, all analysis objectives would be catered for using a single (monolithic)
analytical model which was structured so that only data relevant to the analysis
objectives need be supplied. Analysis objectives would include prediction of the
whole structure response (global), and of the individual elements in the structure
(local) in both deterministic and probabilistic terms. Unfortunately, this is not
currently possible, mainly due to computational limitations.
Thus, it is important that 1) a variety of modelling tools, covering a range of
complexity and analysis capability be available for response analysis of light-frame
buildings, and 2) analysis results are able to be transferred between different models
so that different analysis domains can be crossed, i.e. (local to global, and
deterministic to probabilistic).
The idea of linking global and local response analyses has been used extensively in
analysis of light-frame structures (Kasal 1992; CUREE, 2001), but the extension of
this to hybrid deterministic and probabilistic analyses is new. The feasibility of this
approach has been demonstrated in Kasal et al. (1999).
Here, it is discussed how the FE model (section 4.6) and the shear-building model
(section 4.5) can be integrated into a hybrid stochastic/deterministic modelling
approach for seismic response analysis of light-frame buildings. A similar strategy
can be adopted to link the SDOF and shear-wall models as well.
4.7.2 Formulation
In order to accurately model the seismic response of a complex structural system such
as a light-frame structure, whilst also considering the inherent uncertainties in
structural and excitation properties, a hybrid analysis approach is preferred, and is
shown diagrammatically in Figure 4.8. Under this approach, material and system
variability are obtained from laboratory experiments or from known historical values.
These are used to determine the characteristic values (i.e. 5th percentile) of the
properties of the elements that constitute a detailed, three-dimensional FE model of

Chapter 4 – Structural Modelling
210
the building. The FE model is then subjected to a very simple loading history that
produces a cyclic response of the entire structure, which is then fitted to a much
simpler model (e.g., a two-dimensional shear-wall model as shown in section 4.5 or
shear-building model as shown in section 4.4), using system identification techniques
(see Chapter 3).
The new identified model has only a few DOF and thus can be used in MCS, where
both system properties (e.g., natural period of the building) and the earthquake
excitation can be treated probabilistically. Response statistics can be calculated to
determine reliability or failure probability under an ensemble of loads, and a critical
load history can be determined out of a possible range of loading scenarios. The
displacement response vector from this critical excitation can then be used to ‘re-load’
the original three-dimensional FE model to determine the detailed response of any of
the elements of the FE model. The feasibility of this approach has been demonstrated
by Kasal et al. (1999).
The key aspect of this hybrid analysis approach is the use of system identification to
move from one structural model into another, to enable the transition from one
analysis domain to another. System identification is also used in determining
hysteresis model parameters directly from experimental data as shown in section 3.5.
A hybrid approach is ideal for light-frame buildings because of the high level of
redundancy and complexity in the system, and the large uncertainty in the key system
parameters and the loading.
The proposed approach provides a framework which exploits the advantages of the
various modelling approaches whilst minimising their inherent disadvantages when
used in isolation. It has tremendous versatility because it facilitates transition from
global and local, and from deterministic to probabilistic analysis domains.

Chapter 4 – Structural Modelling
211
Figure 4.8 – Hybrid Response Analysis (Kasal et al., 1999).
4.8 Summary and Conclusions
This chapter presented an overview of seismic response analysis techniques and a
review of whole-building structural modelling of light-frame structures. A range of
structural models for seismic analysis of light-frame structures were formulated and
presented. The key points and findings are summarised as follows.
• Hysteretic SDOF and shear-building models of light-frame structures were
formulated using the differential Bouc-Wen hysteresis elements presented in
Chapter 3, and implemented in computer programs. These models are suitable
for prediction of global responses under uni-directional earthquake excitations.
• An Equivalent Linearisation scheme, formulated for the hysteretic SDOF
model by Foliente (1993), was extended to a MDOF shear-building model.
This technique can be used as a faster alternative to MCS, to estimate the
response statistics of multi-storey structures, under white-noise-based
excitations.

Chapter 4 – Structural Modelling
212
• A hysteretic shear-wall model for light-frame structures, incorporating
differential Bouc-Wen hysteresis elements, was formulated and implemented
in a computer program. The model is suitable for prediction of individual wall
responses under bi-directional excitations, and is simple enough to be suitable
for limited MCS studies.
• A FE modelling strategy, based on work by Kasal (1992), and a hybrid
modelling strategy, for seismic response analysis of light-frame structures has
been outlined. The hybrid modelling strategy facilitates the transition from
global to local response predictions, complex to simple models, and from the
deterministic domain to the stochastic domain.

Chapter 5 – Seismic Response Analysis
213
CHAPTER 5
Seismic Response Analysis
5.1 Introduction
In Chapters 3 and 4 of this thesis, hysteresis and structural models, appropriate for
seismic analysis of light-frame structures were presented. In this chapter, these
models are used to conduct deterministic and stochastic seismic response analyses on
the L-shaped test house described in Chapter 2, and an example three-storey light-
frame building. All of the structural models use modified Bouc-Wen hysteretic
elements, to incorporate the non-linear structural behaviour, which inevitably occurs
in a light-frame structure under extreme seismic loading. The parameters of these
hysteretic elements were derived from the experimental data presented in Chapter 2,
using a non-linear gradient system identification technique. The modified Bouc-Wen
hysteretic element and the system identification of the hysteresis parameters is
described in detail in Chapter 3.
This chapter begins with a deterministic seismic response and sensitivity analysis of
the single-storey L-shaped house described in Chapter 2, using the hysteretic SDOF
model described in section 4.3. The response of an example three-storey light-frame
structure is then examined using the hysteretic shear-building model described in
section 4.4. Next, stochastic response analyses of the single-storey and three-storey
structures are performed using the EQL technique described in sections 4.3 and 4.4.
The response statistics calculated using EQL are compared to those calculated using
MCS methods. Following this, the hysteretic shear-wall model described in section
4.5 is used to calculate the distribution of seismic forces to individual walls of the test
house under seismic loads. The shear-wall model is subjected to cyclic lateral loading
similar to the experiment in Chapter 2, and the response is compared to the
experimental response. Predictions from the SDOF and shear-wall models are

Chapter 5 – Seismic Response Analysis
214
compared, and finally, the hysteretic shear-wall model is used to examine the seismic
demands on the individual walls of the test house under bi-directional earthquake
excitation.
5.2 Ground Motions
5.2.1 Introduction
In the seismic response analyses performed in this chapter, two different suites of
ground-motions are used for the excitations. The first suite was developed for the
CUREE-Caltech Woodframe Project by Krawinkler et al. (2000) and is specifically
targeted at timber structures. The second suite was developed for the SAC steel
project (Somerville et al., 1997) and is targeted at steel buildings. More information
on each of these suites is given in the following.
5.2.2 CUREE Ground Motions
A suite of ground motions appropriate for timber-frame structures has been developed
as part of the CUREE-Caltech Woodframe Project (Hall, 2000). The ground motion
suite was developed specifically as part of a research project on experimental testing
protocols for timber-frame structures. The suite of ground motions consists of twenty
‘ordinary’ ground motions and six ‘near-fault’ ground motions. The ordinary ground
motions are representative of a probability of exceedance of 10 percent in 50 years
(10/50) for Los Angeles site conditions. ‘Ordinary’ implies that the ground motions
are recorded far enough away from the fault such that they are free of typical near-
fault pulse characteristics. The 10/50 records were scaled to a target response
spectrum for Los Angeles conditions (firm soil), within a period range of T=0.2 to
T=1.0 seconds, which was assumed appropriate for timber-frame structures. Random
horizontal components were chosen without regard to the faulting mechanism, to
eliminate any bias in the suite.

Chapter 5 – Seismic Response Analysis
215
The six near-fault records are representative of a probability of exceedance of 2
percent in 50 years (2/50) for Los Angeles conditions. Only the fault-normal
components were used. A pilot study (Alavi and Krawinkler, 1999) indicated that the
fault-normal component was a reasonable representation of the larger of the two
orthogonal components for a randomly chosen direction. The 2/50 records have not
been scaled, and were chosen on the basis of their relatively short pulse-period, which
is likely to be close to the period range of interest for timber-frame structures. Details
of the ordinary and near-fault ground motions in the CUREE suite are given in Tables
5.1 and 5.2, respectively, and full details of the development of the ground motions is
given in Krawinkler et al. (2000).
The CUREE ground motions were developed specifically for timber-frame structures,
and are suitable for the seismic analysis in this research. However, they contain only
one horizontal component for each of the 26 records, and are therefore only suitable
for analysis under uni-directional excitation. These records are used primarily for the
SDOF and shear-building modelling in section 5.3.
5.2.3 SAC Suite of Ground Motions
The SAC steel project is a joint venture between the Structural Engineers Association
of California, the Applied Technology Council, and CUREE. The specific goal of this
project is to investigate the damage to welded steel moment-frame buildings in the
1994 Northridge earthquake. Various suites of ground motions were developed for
topical investigations which form part of this project. Full details on the development
of the suites of earthquake records can be found in Somerville et al. (1997).
Although the SAC ground motion suites are not targeted at light-frame systems, they
are still useful in this study as they are extensive in number, they are site-specific,
they are grouped probabilistically, and most importantly, the records contain both
fault-normal and fault-parallel components. Since the CUREE records contain only
one horizontal component, the SAC ground motions are used in all analysis under bi-
directional excitation, such as for the hysteretic shear-wall modelling presented in
section 5.5.

Chapter 5 – Seismic Response Analysis
216
Table 5.1 – CUREE ground motions: Set of 20 ordinary ground motions with 10% probability of exceedance in 50 years.
Record ID Description Magnitude(Richter)
Distance (km)
Duration (s)
PGA (g)
sup1 Superstition Hills, 1987, Brawley 6.7 18.2 22 0.116
sup2 Superstition Hills, 1987, El Centro Imp. Co. Cent. 6.7 13.9 40 0.258
sup3 Superstition Hills, 1987, Plaster City 6.7 21.0 22.25 0.186
nor2 Northridge, 1994, Beverly Hills 6.7 19.6 30 0.416
nor3 Northridge, 1994, Canoga Park 6.7 15.8 25 0.356
nor4 Northridge, 1994, Glendale - Las Palmas 6.7 25.4 30 0.357
nor5 Northridge, 1994, LA - Hollywood 6.7 25.5 40 0.231
nor6 Northridge, 1994, LA - N Faring Rd 6.7 23.9 30 0.273
nor9 Northridge, 1994, N. Hollywood - Coldwater 6.7 14.6 21.95 0.271
nor10 Northridge, 1994, Sunland - Mt Gleason Ave 6.7 17.7 30 0.157
lp1 Loma Prieta, 1989, Capitola 6.9 14.5 39.9 0.529
lp2 Loma Prieta, 1989, Gilroy Array # 3 6.9 14.4 39.9 0.555
lp3 Loma Prieta, 1989, Gilroy Array # 4 6.9 16.1 39.9 0.417
lp4 Loma Prieta, 1989, Gilroy Array # 7 6.9 24.2 39.9 0.226
lp5 Loma Prieta, 1989, Hollister Diff. Array 6.9 25.8 39.6 0.279
lp6 Loma Prieta, 1989, Saratoga - W Valley Coll. 6.9 13.7 39.9 0.332
cm1 Cape Mendocino, 1992, Fortuna Fortuna Blvd 7.1 23.6 44 0.116
cm2 Cape Mendocino, 1992, Rio Dell Overpass 7.1 18.5 36 0.385
lan1 Landers, 1992, Desert Hot Springs 7.3 23.3 50 0.154
lan2 Landers, 1992, Yermo Fire Station 7.3 24.9 44 0.152
Average 6.86 19.73 35.21 0.29
Median 6.8 19.05 39.78 0.27

Chapter 5 – Seismic Response Analysis
217
Table 5.2 – CUREE ground motions: Set of 6 near-fault ground motions with 2% probability of exceedance in 50 years.
Record ID Description Magnitude (Richter)
Distance (km)
Duration (s)
PGA (g)
lp89lex Loma Prieta, 1989 7 6.3 40 0.67
nr94rrs Northridge, 1994 6.7 7.5 14.95 0.873
nr94newh Northridge, 1994 6.7 7.1 60 0.71
kb95kobj Kobe, 1995 6.9 0.6 60 1.07
kb95tato Kobe, 1995 6.9 1.5 40 0.77
mh84cyld Morgan Hill, 1984 6.2 0.1 60 0.71
Average 6.73 3.85 45.83 0.8 Median 6.80 3.90 50.00 0.74

Chapter 5 – Seismic Response Analysis
218
Table 5.3 – SAC ground motions for Los Angeles with 10% probability of exceedance in 50 years.
Record ID Description Earthquake Magnitude
Distance (km)
Duration (sec)
PGA (cm/sec2)
LA01 Imperial Valley, 1940, El Centro 6.9 10 39.38 452.03
LA02 Imperial Valley, 1940, El Centro 6.9 10 39.38 662.88
LA03 Imperial Valley, 1979, Array #05 6.5 4.1 39.38 386.04
LA04 Imperial Valley, 1979, Array #05 6.5 4.1 39.38 478.65
LA05 Imperial Valley, 1979, Array #06 6.5 1.2 39.08 295.69
LA06 Imperial Valley, 1979, Array #06 6.5 1.2 39.08 230.08
LA07 Landers, 1992, Barstow 7.3 36 79.98 412.98
LA08 Landers, 1992, Barstow 7.3 36 79.98 417.49
LA09 Landers, 1992, Yermo 7.3 25 79.98 509.7
LA10 Landers, 1992, Yermo 7.3 25 79.98 353.35
LA11 Loma Prieta, 1989, Gilroy 7 12 39.98 652.49
LA12 Loma Prieta, 1989, Gilroy 7 12 39.98 950.93
LA13 Northridge, 1994, Newhall 6.7 6.7 59.98 664.93
LA14 Northridge, 1994, Newhall 6.7 6.7 59.98 644.49
LA15 Northridge, 1994, Rinaldi RS 6.7 7.5 14.945 523.3
LA16 Northridge, 1994, Rinaldi RS 6.7 7.5 14.945 568.58
LA17 Northridge, 1994, Sylmar 6.7 6.4 59.98 558.43
LA18 Northridge, 1994, Sylmar 6.7 6.4 59.98 801.44
LA19 North Palm Springs, 1986 6 6.7 59.98 999.43
LA20 North Palm Springs, 1986 6 6.7 59.98 967.61
Average 6.76 11.56 51.27 576.53
Median 6.70 7.10 49.98 540.87

Chapter 5 – Seismic Response Analysis
219
Table 5.4 – SAC ground motions for Los Angeles with 2% probability of exceedance in 50 years.
Record ID Description Earthquake Magnitude
Distance (km)
Duration (sec)
PGA (cm/sec2)
LA21 1995 Kobe 6.9 3.4 59.98 1258
LA22 1995 Kobe 6.9 3.4 59.98 902.75
LA23 1989 Loma Prieta 7 3.5 24.99 409.95
LA24 1989 Loma Prieta 7 3.5 24.99 463.76
LA25 1994 Northridge 6.7 7.5 14.945 851.62
LA26 1994 Northridge 6.7 7.5 14.945 925.29
LA27 1994 Northridge 6.7 6.4 59.98 908.7
LA28 1994 Northridge 6.7 6.4 59.98 1304.1
LA29 1974 Tabas 7.4 1.2 49.98 793.45
LA30 1974 Tabas 7.4 1.2 49.98 972.58
LA31 Elysian Park (simulated) 7.1 17.5 29.99 1271.2
LA32 Elysian Park (simulated) 7.1 17.5 29.99 1163.5
LA33 Elysian Park (simulated) 7.1 10.7 29.99 767.26
LA34 Elysian Park (simulated) 7.1 10.7 29.99 667.59
LA35 Elysian Park (simulated) 7.1 11.2 29.99 973.16
LA36 Elysian Park (simulated) 7.1 11.2 29.99 1079.3
LA37 Palos Verdes (simulated) 7.1 1.5 59.98 697.84
LA38 Palos Verdes (simulated) 7.1 1.5 59.98 761.31
LA39 Palos Verdes (simulated) 7.1 1.5 59.98 490.58
LA40 Palos Verdes (simulated) 7.1 1.5 59.98 613.28
Average 7.02 6.44 41.98 863.76
Median 7.1 4.95 39.99 877.19

Chapter 5 – Seismic Response Analysis
220
Table 5.5 – SAC ground motions for Los Angeles with 50% probability of exceedance in 50 years.
Record ID Description Earthquake Magnitude
Distance (km)
Duration (sec)
PGA (cm/sec2)
LA41 Coyote Lake, 1979 5.7 8.8 39.38 578.34
LA42 Coyote Lake, 1979 5.7 8.8 39.38 326.81
LA43 Imperial Valley, 1979 6.5 1.2 39.08 140.67
LA44 Imperial Valley, 1979 6.5 1.2 39.08 109.45
LA45 Kern, 1952 7.7 107 78.6 141.49
LA46 Kern, 1952 7.7 107 78.6 156.02
LA47 Landers, 1992 7.3 64 79.98 331.22
LA48 Landers, 1992 7.3 64 79.98 301.74
LA49 Morgan Hill, 1984 6.2 15 59.98 312.41
LA50 Morgan Hill, 1984 6.2 15 59.98 535.88
LA51 Parkfield, 1966, Cholame 5W 6.1 3.7 43.92 765.65
LA52 Parkfield, 1966, Cholame 5W 6.1 3.7 43.92 619.36
LA53 Parkfield, 1966, Cholame 8W 6.1 8 26.14 680.01
LA54 Parkfield, 1966, Cholame 8W 6.1 8 26.14 775.05
LA55 North Palm Springs, 1986 6 9.6 59.98 507.58
LA56 North Palm Springs, 1986 6 9.6 59.98 371.66
LA57 San Fernando, 1971 6.5 1 79.46 248.14
LA58 San Fernando, 1971 6.5 1 79.46 226.54
LA59 Whittier, 1987 6 17 39.98 753.7
LA60 Whittier, 1987 6 17 39.98 469.07
Average 6.41 25.53 54.65 417.54
Median 6.15 9.20 51.95 351.44

Chapter 5 – Seismic Response Analysis
221
In this work the SAC ground motion suite for Los Angeles site conditions is used, so
as the results are comparable with the CUREE-based results. The SAC suite for Los
Angeles contains 60 records which are summarised in Tables 5.3 to 5.5. Records
la01-la20 are representative of a probability of exceedance of 10 percent in 50 years
(10/50) for the Los Angeles conditions. Records la21-la40 are representative of a
probability of exceedance of 2 percent in 50 years (2/50), and records la41-la60 are
representative of a probability of exceedance of 50 percent in 50 years (50/50). The
suite is constructed of fault-normal – fault-parallel pairs, with the odd-numbered
records representing fault-normal excitations, and the even numbered records
representing fault-parallel excitations. Details of the records for the 10/50, 2/50 and
50/50 probability of exceedance are given in Tables 5.3, 5.4 and 5.5, respectively.
5.3 Deterministic Seismic Response Analyses Using
SDOF and Shear-Building Models
5.3.1 Introduction
In the following section, the responses of SDOF and shear-building models of light-
frame structures are examined using the CUREE and SAC ground motion suites as the
excitation. The SDOF model is representative of the L-shaped timber-frame test
house described in Chapter 2, and the shear-building model is representative of an
example three-storey timber-frame apartment block with a relatively soft lower storey.
5.3.2 Response Analysis of Test House Using SDOF Model
A hysteretic SDOF model of the test house described in Chapter 2, for responses in
the North-South-direction (directions shown in Figure 2.3) is used in the following to
examine the global response of the test house under uni-directional earthquake
loading. The model is derived from the experimental force-displacement results for

Chapter 5 – Seismic Response Analysis
222
the whole house destructive test, given in Chapter 2. The parameters of the Bouc-
Wen differential hysteresis rule outlined in section 3.4 were fitted to the ‘lumped’
global experimental data using a reduced-gradient system identification technique. A
comparison between the experimental and model responses is shown in Figure 3.19
The fit to the experimental data is good in terms of both the hysteretic shape, and also
the dissipated energy. The SDOF model of the test house, shown in Figure 5.1, was
used to examine the sensitivity of the assumed structural period, equivalent viscous
damping ratio, and ground motion on the seismic response. The model was subjected
to the CUREE and SAC suites of ground motions described in section 5.2. The
hysteresis parameters used in the model are given in the first column of Table 3.4.
Equivalent viscous damping ratios of 2%, 5%, and 10%, and two different values of
building mass were used (M=5.0 and M=6.5 tonne corresponding to T=0.129 and
T=0.147 sec, respectively).
M
Mass•5t (T=0.129 sec)•6.5t (T=0.147 sec)
Damping •2%•5%•10%
Stiffness•119 kN/cm
Figure 5.1 – Details of SDOF model used for single-storey test house sensitivity study.
The resulting displacement demands from these analyses are summarised in Figures
5.2 and 5.3. The median and 90th percentile values of the displacement demand for
the different cases examined are summarised in Table 5.6
The two different values of building mass used in the analyses, represent the lower
and upper bounds of what the likely mass of the test house would be, in its fully
constructed and finished state. The measured mass of the house in the laboratory was
around 5.0 tonne, as is shown in Figure 2.10, however the house had no roof tiles,

Chapter 5 – Seismic Response Analysis
223
cladding, trims or doors and windows. A reasonable range of the mass for the SDOF
model could be anywhere between 5.0 and 6.5 tonnes, depending on the type of
roofing (may be vinyl, asphalt or slate tiles) cladding, trimming and timber which is
used, the moisture content of the timber, and the assumed vertical distribution of the
mass. The corresponding period range for these bounds is between T=0.13 to T=0.15
seconds, which is consistent with the expected period for this type of house, and
measured values in the field (Beck et al., 2001; Foliente and Zacher 1994).
The main features of the analysis results in Figures 5.2 and 5.3, and Table 5.6, are that
the displacement demands at the 90th percentile levels can be:
1. Up to 150% higher for a T=0.15 sec model than for a T=0.13 sec. model.
These are both reasonable values of period for the test house, given the
variability in stiffness and mass appropriate for this type of structure.
2. Up to 190% higher for system with 2% damping compared to a system with
10% damping. Based on the available data, it can be argued that these are both
reasonable equivalent viscous damping values for the test house.
3. Up to three times higher under the SAC ground motions than for the
corresponding CUREE ground motions. The ground motion suites are both
deemed appropriate for Los Angeles site conditions, and are scaled for the
same target response spectrum (firm soil), but for different target period range.
The response difference can be explained by the differing characteristics of the
records selected for the suites.
The median displacement demand under the SAC and CUREE ground motions could
range from 0.2 to 3.03cm, depending on the assumed mass and damping, and the
ground motion suite used in the analysis. This demand range is representative of
damage states from completely undamaged to moderately damaged. The 90th
percentile displacement demand ranges from 0.31cm to 6.84cm, which is
representative of damage states from completely undamaged to severely damaged.
These results indicate the sensitivity of the seismic response of the test house to the
ground motion, and also the assumed mass and damping (this is examined in more
detail later in this section).

Chapter 5 – Seismic Response Analysis
224
0.0
0.2
0.4
0.6
0.8
1.0
1.2
sup1
sup2
sup3
nor2
nor3
nor4
nor5
nor6
nor9
nor1
0
lp1
lp2
lp3
lp4
lp5
lp6
cm1
cm2
lan1
lan2
lp89
lex
nr94
rrs
nr94
new
h
kb95
kobj
kb95
tato
mh8
4cyl
d
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
la01
la02
la03
la04
la05
la06
la07
la08
la09
la10
la11
la12
la13
la14
la15
la16
la17
la18
la19
la20
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
0.0
1.0
2.0
3.0
4.0
5.0
6.0
la21
la22
la23
la24
la25
la26
la27
la28
la29
la30
la31
la32
la33
la34
la35
la36
la37
la38
la39
la40
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
Figure 5.2 – Displacement demands for SDOF model (T=0.129 sec) for different levels of assumed equivalent viscous damping, under 10/50 and 2/50 CUREE and
SAC earthquakes.
CUREE 10/50 CUREE 2/50
SAC 10/50
SAC 2/50

Chapter 5 – Seismic Response Analysis
225
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
sup1
sup2
sup3
nor2
nor3
nor4
nor5
nor6
nor9
nor1
0
lp1
lp2
lp3
lp4
lp5
lp6
cm1
cm2
lan1
lan2
lp89
lex
nr94
rrs
nr94
new
h
kb95
kobj
kb95
tato
mh8
4cyl
d
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
0.0
1.0
2.0
3.0
4.0
5.0
6.0
la01
la02
la03
la04
la05
la06
la07
la08
la09
la10
la11
la12
la13
la14
la15
la16
la17
la18
la19
la20
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
la21
la22
la23
la24
la25
la26
la27
la28
la29
la30
la31
la32
la33
la34
la35
la36
la37
la38
la39
la40
Earthquake
Max
. Dis
pl (c
m)
10% damping 5% damping 2% damping
Figure 5.3 – Displacement demands from SDOF model (T=0.147 sec) for different levels of assumed equivalent viscous damping, under 10/50 and 2/50 CUREE and
SAC earthquakes.
CUREE 10/50 CUREE 2/50
SAC 10/50
SAC 2/50

Chapter 5 – Seismic Response Analysis
226
Table 5.6 – Statistics of displacement demand predictions from SDOF model of test house, under SAC and CUREE ground motions.
Displacement Demand (cm) M = 5 tonne M=6.5 tonne
CUREE SAC CUREE SAC EQ
Level
Equivalent Viscous Damping
Ratio Median 90th Pctl Median 90th Pctl Median 90th Pctl Median 90th Pctl 10% 0.20 0.31 0.36 1.27 0.28 0.52 0.53 1.53
5% 0.26 0.42 0.41 1.82 0.36 0.70 0.69 2.29 10/50
2% 0.32 0.58 0.57 2.27 0.41 1.66 0.89 3.54
10% 0.48 0.67 0.64 1.43 0.83 1.03 1.08 2.88
5% 0.55 0.72 0.85 2.59 0.99 1.12 1.99 4.65 2/50
2% 0.75 1.01 1.26 4.13 1.09 2.54 3.03 6.84
If we consider median response values, it can be said that with an assumed mass of
5.0t, the structure performs very well under all but the most severe earthquakes,
regardless of the assumed damping. For this case, the structure is unlikely to suffer
even moderate damage. However, with an assumed mass of 6.5t, the structure is
likely to incur severe damage under a 2/50 earthquake or moderate damage under the
10/50 earthquakes.
Given the range of responses of the SDOF model of the test house shown in Figures
5.2 and 5.3, and the range of building period and damping examined, this type of
structure is highly unlikely to collapse due to direct shaking, during an earthquake.
The 90th percentile displacement demand of the 6.5 tonne house with 2% damping,
under the SAC 2/50 earthquakes is 6.8cm and the maximum predicted response under
any record is 13cm – this is the extreme worst-case response prediction, but is still
probably less than the displacement capacity of the house (which is at least 12cm).
However the level of damage incurred is uncertain, and could range anywhere from
undamaged to severely damaged. This is important, because the less severe damage
states are increasingly becoming important in performance assessment, due to the
large economic cost of damage repair. It is therefore desirable that structural models
can predict these damage states, and given the range of the predictions above, also
quantify the variability in the predictions.

Chapter 5 – Seismic Response Analysis
227
The SDOF model used here gives an indication of the likely global responses,
however different parts of the structure may have different damage status under the
same earthquake, depending on the shear-wall layout and configuration. For example,
in the test house, wall W3 is gypsum clad on both sides and may incur greater damage
than other walls at the same displacement level. Because of this, a more detailed
modelling approach, which considers the individual wall characteristics, as well as bi-
directional excitation and response, may be more appropriate for predicting the
damage status of light-frame construction. The hysteretic shear-wall model presented
in section 4.5 has these capabilities and is used to further examine the seismic
response of the test house, later in this chapter, in section 5.5. For now, the
sensitivity of the SDOF model response to the assumed period, equivalent viscous
damping ratio and ground motion are addressed in more detail in the following sub-
sections.
Sensitivity to Assumed Structural Period
To examine the sensitivity of the response to the assumed structural period further,
inelastic displacement ‘response spectra’ were constructed, over the range of building
periods which are reasonable for single-storey houses, from 0.08 to 0.2 seconds
(12.5Hz to 5Hz) using the CUREE and SAC ground motions. In constructing the
spectra, the strengths of the SDOF systems used in the analyses were assumed to be
proportional to the stiffness, and were scaled according to the experimentally
determined value of 100 kN for the T=0.129 sec system. The strength values which
were used, for selected values of period, are given in Table 5.7.
The individual inelastic displacement response spectra, for the 10/50 and 2/50 SAC
and CUREE ground motions for assumed equivalent viscous damping values of 2%,
5% and 10% are plotted in Figures 5.4, 5.5 and 5.6, respectively. Typical hysteresis
responses of the SDOF model are shown in Figure 5.7. The spectra in Figures 5.4 to
5.6 demonstrate the large range of the responses, due to the variability in the ground
motions and indicate the sensitivity of the response to the assumed period, damping
and ground motion. The median of these inelastic response spectra, for each ground
motion grouping, show a clearer picture, and are given in Figure 5.8. The 90th
percentile of the spectra are given in Figure 5.9. Also marked on Figures 5.8 and 5.9

Chapter 5 – Seismic Response Analysis
228
are the periods corresponding to the values, which could be appropriate for the test
house. The ordinates of the median spectra, for selected values of structural period,
are given in Table 5.7, and the ordinates of the 90th percentile spectra are given in
Table 5.8.
It can be seen on the spectra in Figures 5.8 and 5.9, that inelastic behaviour starts to
occur at around 0.8cm displacement (this is equivalent to a drift ratio of around
1/300). All the spectra are basically linear below the 0.8cm displacement level, but
once this threshold is crossed, they begin to increase exponentially. This is consistent
with the results from the destructive experiment described in Chapter 2, where
yielding of the whole house response occurs at around 0.8cm. This is also consistent
with the individual calculated hysteresis responses (such as in Figure 5.7), which do
not exhibit significant yielding until around 0.8cm displacement.
On the median spectra shown in Figure 5.8, a displacement demand of 0.8cm, at
which inelastic behaviour first occurs, falls inside the critical period range for the test
house (i.e. 0.13 to 0.15 sec) on all except the CUREE 10/50 spectra. On the 90th
percentile spectra in Figure 5.9, the critical period range also corresponds with
significant variability in displacement demand – indicating sensitivity to the assumed
period. The predicted median demand can be up to 150% higher for a T=0.15 sec
model than for a T=0.13 sec. model. These results highlight the importance in
determining an accurate value of the fundamental period of the house in order to
accurately assess its seismic response, and the likely damage status, since the
structural period for single-storey houses, may fall in the range where transition from
elastic to inelastic response occurs, or where the response spectrum is rising
significantly.
Sensitivity to Assumed Equivalent Viscous Damping
Equivalent viscous damping is included in the SDOF model, in an idealised lumped
element (see Figure 5.1), to account for all of the non-hysteretic damping which is
present in a real structure. Damping in structures is not well understood, and hence
sensitivity studies are important to understand its influence on response. Field
measurements of damping by Beck et al. (2000), taken from earthquake response

Chapter 5 – Seismic Response Analysis
229
measurements on instrumented low-rise light-frame structures, and forced vibration
tests, indicate damping values between 5% and 10%. Another study by Suzuki et al.
(1996) on light-frame timber houses indicates values between 1% and 5%. These
results highlight the large variability in ‘real’ damping in light-frame structures.
The choice of damping value to use in seismic response modelling is complex. This
is because the ‘target’ total damping in the model (which, as explained above, is very
difficult to determine) depends on the value of equivalent viscous damping used, and
also on how the model incorporates the hysteretic component of the total damping. A
model which uses elasto-plastic hysteretic elements has no pre-yield hysteretic
damping contribution. More accurate hysteresis models (e.g. DE or differential
models – see Chapter 3) do account for the pre-yield damping to varying degrees, and
hence the equivalent viscous component of the damping in the model should be
adjusted accordingly to achieve the desired total damping.
The data plotted on Figures 5.8 and 5.9, and presented in Tables 5.7 and 5.8, indicate
that predicted seismic response is sensitive to the assumed equivalent viscous
damping in the SDOF differential hysteretic model. Equivalent viscous damping
values of 2%, 5% and 10% of critical were examined, and the models with smaller
damping consistently predict higher displacement demand, over all periods, and under
all earthquakes considered.
It is difficult to make any recommendations on what equivalent viscous damping
value is best to use for response prediction purposes, because of the uncertainty of the
‘target’ damping, and the variability in the contribution of hysteretic damping arising
from different modelling approaches. The only definitive recommendation which can
be given, is that response predictions are sensitive to the assumed equivalent viscous
damping. For the purposes of the modelling and analysis conducted herein, it will be
assumed that 2% is the lower bound, and 10% is the upper bound of the non-
hysteretic viscous damping, and that 5% is a reasonable value to use, if only a single-
value of equivalent viscous damping is used in a seismic response analysis.

Chapter 5 – Seismic Response Analysis
230
0
2
4
6
8
10
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
sup1 sup2 sup3 nor2
nor3 nor4 nor5 nor6
nor9 nor10 lp1 lp2
lp3 lp4 lp5 lp6
cm1 cm2 lan1 lan2
Displacement (cm)
0
6
12
18
24
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
lp89lex
nr94rrs
nr94newh
kb95kobj
kb95tato
mh84cyld
Displacement (cm)
0
2
4
6
8
10
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la01.dat la02.dat la03.datla04.dat la05.dat la06.datla07.dat la08.dat la09.datla10.dat la11.dat la12.datla13.dat la14.dat la15.datla16.dat la17.dat la18.datla19.dat la20.dat
Displacement (cm)
0
6
12
18
24
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la21.dat la22.dat la23.datla24.dat la25.dat la26.datla27.dat la28.dat la29.datla30.dat la31.dat la32.datla33.dat la34.dat la35.datla36.dat la37.dat la38.datla39.dat la40.dat
Displacement (cm)
Figure 5.4 – Displacement demand predictions from SDOF model (with 2% damping) under 10/50 and 2/50 CUREE and SAC ground motions.
CUREE 10/50 CUREE 2/50
SAC 10/50 SAC 2/50

Chapter 5 – Seismic Response Analysis
231
0
2
4
6
8
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
sup1 sup2 sup3 nor2
nor3 nor4 nor5 nor6
nor9 nor10 lp1 lp2
lp3 lp4 lp5 lp6
cm1 cm2 lan1 lan2
Displacement (cm)
0
4
8
12
16
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
lp89lex
nr94rrs
nr94newh
kb95kobj
kb95tato
mh84cyld
Displacement (cm)
0
2
4
6
8
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la01.dat la02.dat la03.datla04.dat la05.dat la06.datla07.dat la08.dat la09.datla10.dat la11.dat la12.datla13.dat la14.dat la15.datla16.dat la17.dat la18.datla19.dat la20.dat
Displacement (cm)
0
4
8
12
16
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la21.dat la22.dat la23.datla24.dat la25.dat la26.datla27.dat la28.dat la29.datla30.dat la31.dat la32.datla33.dat la34.dat la35.datla36.dat la37.dat la38.datla39.dat la40.dat
Displacement (cm)
Figure 5.5 – Displacement demand predictions from SDOF model (with 5% damping) under 10/50 and 2/50 CUREE and SAC ground motions.
CUREE 10/50 CUREE 2/50
SAC 10/50 SAC 2/50

Chapter 5 – Seismic Response Analysis
232
0
2
4
6
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
sup1 sup2 sup3 nor2
nor3 nor4 nor5 nor6
nor9 nor10 lp1 lp2
lp3 lp4 lp5 lp6
cm1 cm2 lan1 lan2
Displacement (cm)
0
2
4
6
8
10
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
lp89lex
nr94rrs
nr94newh
kb95kobj
kb95tato
mh84cyld
Displacement (cm)
0
2
4
6
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la01.dat la02.dat la03.datla04.dat la05.dat la06.datla07.dat la08.dat la09.datla10.dat la11.dat la12.datla13.dat la14.dat la15.datla16.dat la17.dat la18.datla19.dat la20.dat
Displacement (cm)
0
2
4
6
8
10
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
la21.dat la22.dat la23.datla24.dat la25.dat la26.datla27.dat la28.dat la29.datla30.dat la31.dat la32.datla33.dat la34.dat la35.datla36.dat la37.dat la38.datla39.dat la40.dat
Displacement (cm)
Figure 5.6 – Displacement demand predictions from SDOF model (with 10% damping) under 10/50 and 2/50 CUREE and SAC ground motions.
CUREE 10/50
CUREE 2/50
SAC 10/50 SAC 2/50

Chapter 5 – Seismic Response Analysis
233
-120
-80
-40
0
40
80
120
-8 -6 -4 -2 0 2 4
Displacement (cm)
Force (kN)
(a) T=0.2 sec system with 5% damping under nr94newh ground motion
-120
-80
-40
0
40
80
120
-4 -2 0 2 4
Displacement (cm)
Force (kN)
(b) T=0.129 sec system with 5% damping under LA30 ground motion
Figure 5.7 – Example hysteretic responses of SDOF model under selected ground motions.

Chapter 5 – Seismic Response Analysis
234
0.0
0.4
0.8
1.2
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
CUREE 10/50
M=5t M=6.5t
0
1
2
3
4
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
SAC 10/50
M=5t M=6.5t
Figure 5.8 – Comparison of median displacement demands for different assumed equivalent viscous damping levels.

Chapter 5 – Seismic Response Analysis
235
0
2
4
6
8
10
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
CUREE 2/50
M=5t M=6.5t
0
4
8
12
16
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
SAC 2/50
M=5t M=6.5t
Figure 5.8 (cont’d ) – Comparison of median displacement demands for different assumed equivalent viscous damping levels.

Chapter 5 – Seismic Response Analysis
236
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
CUREE 10/50
M=5t M=6.5t
0
2
4
6
8
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
SAC 10/50M=5t M=6.5t
Figure 5.9 – Comparison of 90th percentile displacement demands for different assumed equivalent viscous damping levels.

Chapter 5 – Seismic Response Analysis
237
0
4
8
12
16
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
CUREE 2/50M=5t M=6.5t
0
4
8
12
16
20
24
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) 2% 5% 10%
SAC 2/50
M=5t M=6.5t
Figure 5.9 (cont’d) – Comparison of 90th percentile displacement demands for different assumed equivalent viscous damping levels.

Chapter 5 – Seismic Response Analysis
238
Table 5.7 – Median displacement demands for SDOF models with different periods and strengths under SAC and CUREE ground motions.
Hysteretic SDOF System Median Displacement demand (cm)
10/50 CUREE 10/50 SAC 2/50 CUREE 2/50 SAC T sec
F Hz
K kN/cm
Fu kN
2% 5% 10% 2% 5% 10% 2% 5% 10% 2% 5% 10%
0.08 12.50 308.4 264.1 0.08 0.06 0.06 0.14 0.12 0.11 0.18 0.16 0.15 0.21 0.19 0.18
0.10 10.00 197.4 169.0 0.14 0.12 0.10 0.27 0.22 0.20 0.31 0.28 0.25 0.41 0.33 0.30
0.12 8.50 142.6 122.1 0.22 0.20 0.16 0.39 0.34 0.30 0.53 0.47 0.39 0.76 0.60 0.46
0.12 8.00 126.3 108.2 0.27 0.23 0.18 0.49 0.38 0.34 0.67 0.51 0.45 1.02 0.73 0.56
0.13 7.50 111.0 95.1 0.33 0.27 0.22 0.70 0.45 0.40 0.75 0.64 0.56 1.66 1.02 0.74
0.14 7.00 96.7 82.8 0.39 0.33 0.26 0.88 0.62 0.49 0.88 0.82 0.73 2.60 1.50 0.96
0.15 6.50 83.4 71.4 0.51 0.42 0.32 1.59 0.86 0.59 2.30 1.27 1.02 4.50 2.57 1.43
0.17 6.00 71.1 60.8 0.71 0.53 0.39 2.24 1.17 0.75 4.22 2.55 1.60 5.85 3.53 2.45
0.18 5.50 59.7 51.1 0.79 0.66 0.50 3.30 1.95 1.10 4.87 3.86 2.62 7.52 5.18 3.29
0.20 5.00 49.3 42.2 1.22 0.76 0.61 3.81 2.90 1.83 8.98 6.02 3.67 15.79 7.50 4.44
0.22 4.55 40.8 34.9 1.72 1.00 0.72 5.44 3.70 2.16 16.15 8.81 5.49 18.69 12.99 7.08
0.25 4.00 31.6 27.0 2.22 1.57 1.03 7.94 6.23 3.92 38.42 26.64 14.85 24.86 17.46 11.84
0.30 3.33 21.9 18.8 3.66 2.70 1.67 13.16 9.61 6.63 48.66 36.79 23.46 36.78 27.96 18.89
0.35 2.86 16.1 13.8 4.86 3.51 2.34 17.42 10.67 7.93 45.48 34.88 24.93 51.47 30.90 22.85
0.40 2.50 12.3 10.6 5.57 4.57 3.07 25.45 14.50 9.73 42.19 34.94 25.84 50.81 40.01 26.21
0.45 2.22 9.7 8.3 6.69 4.80 3.55 25.86 18.69 12.44 41.24 33.93 27.00 53.47 37.39 29.04
0.60 1.67 5.5 4.7 9.58 6.57 4.92 32.04 24.79 18.34 46.25 38.51 30.85 52.07 38.25 30.32
0.80 1.25 3.1 2.6 12.14 9.01 7.11 38.94 28.52 21.14 56.32 47.23 37.50 66.23 55.95 43.64
1.00 1.00 2.0 1.7 12.36 9.38 7.48 43.97 35.50 26.20 61.60 50.71 41.60 70.69 59.14 51.13

Chapter 5 – Seismic Response Analysis
239
Table 5.8 – 90th percentile displacement demands for SDOF models with different periods and strengths under SAC and CUREE ground motions.
Hysteretic SDOF System 90th Percentile Displacement demand (cm)
10/50 CUREE 10/50 SAC 2/50 CUREE 2/50 SAC T sec
F Hz
K kN/cm
Fu kN
2% 5% 10% 2% 5% 10% 2% 5% 10% 2% 5% 10%
0.08 12.50 308.4 264.1 0.14 0.12 0.11 0.28 0.26 0.24 0.20 0.19 0.18 0.40 0.35 0.29
0.10 10.00 197.4 169.0 0.30 0.26 0.20 0.90 0.58 0.49 0.35 0.34 0.33 0.97 0.69 0.54
0.12 8.50 142.6 122.1 0.43 0.36 0.28 2.31 1.34 0.79 0.63 0.55 0.52 3.02 1.56 0.90
0.12 8.00 126.3 108.2 0.51 0.37 0.30 1.93 1.73 1.14 0.72 0.66 0.62 3.63 2.25 1.26
0.13 7.50 111.0 95.1 0.64 0.48 0.36 2.80 1.58 1.41 1.07 0.80 0.74 4.22 3.13 1.78
0.14 7.00 96.7 82.8 1.12 0.62 0.47 3.02 2.11 1.45 1.65 0.98 0.93 4.84 3.35 2.70
0.15 6.50 83.4 71.4 1.94 0.83 0.58 3.57 2.75 1.71 3.97 1.84 1.24 10.28 7.46 4.45
0.17 6.00 71.1 60.8 2.23 1.35 0.74 4.99 3.43 2.33 5.15 3.55 2.39 12.29 8.27 5.71
0.18 5.50 59.7 51.1 2.12 1.87 0.91 6.89 5.16 3.15 8.57 8.15 5.03 16.96 9.69 6.83
0.20 5.00 49.3 42.2 2.60 2.03 1.51 10.04 6.35 4.36 25.1 14.8 8.8 25.8 18.8 10.8
0.22 4.55 40.8 34.9 3.58 2.26 1.54 11.25 7.17 4.77 43.8 25.4 15.5 37.8 22.4 13.4
0.25 4.00 31.6 27.0 5.58 3.63 2.68 14.27 10.40 6.34 64.6 37.2 22.8 50.3 32.4 18.0
0.30 3.33 21.9 18.8 8.05 5.43 3.83 24.55 17.24 10.84 62.2 47.2 34.5 70.2 40.2 25.5
0.35 2.86 16.1 13.8 12.86 8.24 5.42 31.74 20.64 13.26 69.2 51.3 37.0 86.2 57.2 35.1
0.40 2.50 12.3 10.6 17.55 10.32 7.42 35.85 25.21 17.04 62.3 52.3 38.9 95.0 64.1 41.3
0.45 2.22 9.7 8.3 16.03 12.45 8.34 39.83 27.02 19.13 61.9 46.0 37.7 104.3 75.8 52.0
0.60 1.67 5.5 4.7 19.14 14.12 10.51 53.67 31.31 22.75 76.8 64.1 46.3 134.7 92.4 57.9
0.80 1.25 3.1 2.6 26.21 17.66 14.04 79.15 51.11 29.87 76.6 64.3 52.8 155.6 102.9 69.3
1.00 1.00 2.0 1.7 27.91 20.67 14.92 69.19 54.79 40.05 74.6 63.2 54.0 129.1 110.8 84.9

Chapter 5 – Seismic Response Analysis
240
Sensitivity to Ground Motion
It can be seen in Figure 5.2, that under the CUREE suite of earthquakes, no significant
inelastic response is predicted by the SDOF models, under any of the 26 earthquakes
for the T=0.129 sec system. The maximum predicted displacement demand, for all
damping values, is around 1.0cm (nr94newh earthquake). Under the SAC ground
motions however, the displacement demand is predicted to be well into the inelastic
range for some of the 10/50 earthquakes, and about half of the 2/50 earthquakes. A
similar discrepancy between the CUREE and SAC based predictions is also apparent
for the T=0.147 sec system (see Figure 5.3). A summary of the statistics of the
predicted displacement demands for the two suites is given in Table 5.6. This
highlights the difference in the demand predictions, with the SAC suite consistently
resulting in larger demands than the CUREE suite, in terms of the median value and
the 90th percentile displacement demand, especially for the 10/50 earthquakes.
In Figure 5.10 (a), the median displacement demand spectra, for the 5% damping case
are plotted together, over the period range from T=0.08 to T=0.2 seconds, which is
the period range of interest for the structures examined in this thesis (i.e. one- to three-
storey). It is shown that the predicted displacement demands are significantly higher
for the SAC ground motion suite than for the corresponding CUREE ground motions
over this entire period range. This observation also applies to the 2% and 10%
damping cases as well. The large difference in predicted median displacement
demand is curious seeing as the ground motion suites were both developed for Los
Angeles site conditions (although for different building types), and for the same target
response spectrum, for firm soil.
Some difference in the predicted median responses for the two suites is to be
expected, since the CUREE records are targeted at timber-frame structures, which
were assumed to have a period range from 0.2 to 1.0 seconds by the developers
(Krawinkler et al., 2000). The SAC records are targeted at steel buildings with an
assumed period range from 0.3 to 4.0 seconds. In Figure 5.10 (b) the difference in
median response predictions over the period range T=0.1 to T=1.0 seconds is shown,
so as to compare the spectra within a target period range that is common to both
suites.

Chapter 5 – Seismic Response Analysis
241
0
2
4
6
8
0.08 0.10 0.12 0.14 0.16 0.18 0.20
Period (sec)
Displacement (cm) CUREE 10/50 SAC 10/50 CUREE 2/50 SAC 2/50
5% damping
M=5t M=6.5t
(a) Period range 0.08 to 0.2 seconds
0
10
20
30
40
50
60
0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00
Period (sec)
Displacement (cm) CUREE 10/50 SAC 10/50 CUREE 2/50 SAC 2/50
5% damping
(b) Period range 0.1 to 1.0 seconds
Figure 5.10 – Comparison of median displacement demands for SAC and CUREE ground motions.

Chapter 5 – Seismic Response Analysis
242
This also shows that the CUREE spectra predict smaller displacement demands than
the SAC spectra over this period range for the 10/50 earthquakes, but that the spectra
are reasonably close for the 2/50 earthquakes. The ordinates of all the spectra, and
strength values used in the analyses, for selected periods, are given in Table 5.7.
The difference in predicted responses can be explained by closer inspection of the
characteristics of the earthquake records which make up the SAC and CUREE suites.
Although both suites were developed for Los Angeles site conditions, and for the
same target response spectrum (firm soil), the record selection, and characteristics of
the records are quite different. Most importantly, the SAC suites have a higher
average and median PGA, especially for the 10/50 suite, which is double that of the
equivalent CUREE suite (see statistics at bottom of Tables 5.1 to 5.4). The major
differences between the SAC and CUREE suites, which may influence response
prediction, include the following:
- Different structure type and target period range.
- Average PGA for the SAC 10/50 records is double the average for the CUREE
10/50 records
- The SAC 10/50 records are predominantly near-fault records (16 out of 20),
whereas none of the CUREE 10/50 records are from near-fault recordings
- The SAC 2/50 records were all derived from recordings on firm soil whereas
the CUREE 10/50 suite contains a mix of records from soft rock and firm soil
- Average PGA for the SAC 2/50 records is 10% higher than for the equivalent
CUREE records
- The CUREE 2/50 suite contains only six records, compared to twenty records
for the SAC 2/50 suite
For the purposes of this study, both sets of ground motions are assumed to be valid for
the seismic performance prediction of light-frame structures, even though they predict
different damage levels ranging from completely undamaged, to severely damaged,
under the same probability level excitations, with the same target spectrum. The
rationale for this is that this range of damage predictions is consistent with field
observations. During the Northridge earthquake, around 1000 single houses were
‘red-tagged’ (rendered uninhabitable), and around 6000 were ‘yellow tagged’ (limited
entry) in the Los Angeles area (Hall, 1996). Of course many of the single houses

Chapter 5 – Seismic Response Analysis
243
were also relatively undamaged, indicating that a wide range of damage states were
indeed present, so having a similarly large spread of damage predictions in the
analytical modelling is reasonable.
The study by Hall (1996) also found that many multi-level timber buildings were
severely damaged or destroyed during the Northridge earthquake. These types of
buildings are the subject of the next section of this thesis.
5.3.3 Response of Three-Storey Building Using Shear-Building Model
A model of an example three-storey timber-frame building was developed to examine
the global response of a multi-level light-frame building under earthquake loading.
The shear-building model described in section 4.4 was used in the study. The mass
and stiffness characteristics are shown in Figure 5.11, and were chosen to match the
natural frequency of a typical three-storey timber building with a relatively soft lower
storey. The lower storey in this type of multi-dwelling apartment building is often
used for car-parking, and therefore requires large openings along one direction, which
can result in a relatively soft storey compared to the upper floors which have many
more shear-walls. These types of timber buildings were found to be prone to collapse
or severe damage during the Northridge earthquake (Hall, 1996).
The fundamental natural frequency of the example building is 4.68 Hz (T=0.21 sec),
which is typical for three-storey light-frame construction and is consistent with the
experimentally determined frequency of the three-storey timber building studied by
Beck et al. (2001) as part of the CUREE-Caltech Woodframe Project. The pinching,
and strength and stiffness degradation characteristics of each of the stories were
assumed to be the same as for the SDOF model (section 5.3.2) and the strengths for
each level were scaled proportionally to the stiffness of the SDOF model (see Table
3.4 for hysteresis parameters). This is reasonable if similar construction is assumed
(i.e. light timber frame with plywood bracing). The equivalent viscous damping ratio
was taken as 5%.

Chapter 5 – Seismic Response Analysis
244
The hysteretic shear-building model of the three-storey building was subjected to the
ground motions in the CUREE and SAC suites of records described above. The peak
inter-storey displacement responses from these analyses are summarised in Figure
5.12. Under the 10/50 earthquakes, the median of the inter-storey displacement
demand is 0.58cm and 2.11cm for the CUREE and SAC ground motions,
respectively. For the 2/50 earthquakes the median demand is 3.38cm and 5.83cm,
respectively. As for the single-storey house, the predicted inter-storey demands under
all the earthquakes represent damage states from completely undamaged to severely
damaged. All of the peak displacements were recorded in the lower storey. Examples
of the hysteretic responses predicted by the model, under a ground motion from the
Northridge earthquake, for each of the thee levels, is shown in Figure 5.13 This
shows that the inelastic response occurs primarily in the lower storey, and that the
upper storey responds in the elastic range.
The median and 90th percentile of the responses calculated for this example three-
storey building are given in Table 5.9, and are more severe than for the single-storey
building under the same suite of excitations (compare with Table 5.6). These results
indicate that multi-level light-frame construction can be more prone to damage under
earthquake loading than single level construction, since the displacement demands are
likely to be higher. This will be particularly important if sub-standard construction
details are present in these structures, which may reduce their displacement capacity.
This is consistent with the observations from the damage in timber-frame buildings
observed after the Northridge earthquake, which showed that up to 200 multi-storey
buildings with soft first-storey either collapsed or came close (Office of Emergency
Services, 1995). Many of these failures were due to poor construction details and
practices. The increased demand levels for this type of structure are to be expected,
given the inelastic response spectra of the SDOF systems, depicted in Figures 5.8 and
5.9, which shows a dramatic increase in displacement demand as the structure’s
natural period increases from 0.15 seconds (i.e. representative of single-storey) to 0.2
seconds (i.e. representative of three-storey). It should be noted that the shear-
building model does not consider torsional effects. Torsion may be important for
multi-level light-frame structures with first-storey car parking areas because of the
non-symmetrical wall layout (due to large openings on one side). Inclusion of torsion
is likely to result in larger demand predictions than those presented herein.

Chapter 5 – Seismic Response Analysis
245
In Figure 5.14, the predicted demands in terms of drift ratio, are shown for the shear-
building model, and the equivalent SDOF model, with T=0.21 sec and equivalent
viscous damping of 5%. The data indicates the SDOF model can either over-predict
the maximum response compared to the three degree of freedom shear-building model
by up to 150% or under-predict by up to 73%. This highlights that it is important to
characterise the vertical distribution of mass and stiffness when studying the seismic
performance of multi-level light-frame construction, and that analysis methods which
are dependent on assumed SDOF behaviour should be used with caution.
7.2 t
6.5 t
5 t
260 kN/cm
250 kN/cm
220 kN/cm
T= 0.21 sec F = 4.68 HzDamping = 5%
Figure 5.11 – Details of shear-building model for example three-storey building.
Table 5.9 – Statistics of inter-storey displacement demand predictions from shear-building model of example three-storey timber building, under SAC and CUREE
ground motions.
Inter-Storey Displacement Demands (cm)
CUREE SAC Earthquake
Level Median 90th pctl Median 90th pctl
10/50 0.58 1.68 2.11 4.46 2/50 3.38 6.89 5.83 9.01

Chapter 5 – Seismic Response Analysis
246
0.0
1.0
2.0
3.0
4.0
sup1
sup2
sup3
nor2
nor3
nor4
nor5
nor6
nor9
nor1
0
lp1
lp2
lp3
lp4
lp5
lp6
cm1
cm2
lan1
lan2
lp89
lex
nr94
rrs
nr94
new
h
kb95
kobj
kb95
tato
mh8
4cyl
d
Earthquake
Max
. Int
er-S
tore
y D
ispl
. (cm
)
0.0
1.0
2.0
3.0
4.0
5.0
6.0
la01
la02
la03
la04
la05
la06
la07
la08
la09
la10
la11
la12
la13
la14
la15
la16
la17
la18
la19
la20
Earthquake
Max
. Int
er-S
tore
y D
ispl
. (cm
)
0.0
4.0
8.0
12.0
16.0
20.0
la21
la22
la23
la24
la25
la26
la27
la28
la29
la30
la31
la32
la33
la34
la35
la36
la37
la38
la39
la40
Earthquake
Max
. Int
er-S
tore
y D
ispl
. (cm
)
Figure 5.12 – Inter-storey displacement demand predictions for example three-storey building under 10/50 and 2/50 CUREE and SAC earthquakes.
CUREE 10/50
CUREE 2/50
SAC 10/50
SAC 2/50

Chapter 5 – Seismic Response Analysis
247
-250
-125
0
125
250
-4 -2 0 2 4
Inter-Story Displacement - Level 1 (cm)
Force (kN)
-250
-125
0
125
250
-4 -2 0 2 4
Inter-Story Displacement - Level 2 (cm)
Force (kN)
-250
-125
0
125
250
-4 -2 0 2 4
Inter-Story Displacement - Level 3 (cm)
Force (kN)
Figure 5.13 – Hysteretic responses of example three-storey building under nr94rrs ground motion.

Chapter 5 – Seismic Response Analysis
248
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
sup1
sup2
sup3
nor2
nor3
nor4
nor5
nor6
nor9
nor1
0
lp1
lp2
lp3
lp4
lp5
lp6
cm1
cm2
lan1
lan2
lp89
lex
nr94
rrs
nr94
new
h
kb95
kobj
kb95
tato
mh8
4cyl
d
Earthquake
Max
. Drif
t Rat
io
SDOF Shear Building
0.0%
0.5%
1.0%
1.5%
2.0%
2.5%
la01
la02
la03
la04
la05
la06
la07
la08
la09
la10
la11
la12
la13
la14
la15
la16
la17
la18
la19
la20
Earthquake
Max
. Drif
t Rat
io
SDOF Shear Building
0.0%
1.0%
2.0%
3.0%
4.0%
5.0%
6.0%
7.0%
la21
la22
la23
la24
la25
la26
la27
la28
la29
la30
la31
la32
la33
la34
la35
la36
la37
la38
la39
la40
Earthquake
Max
. Drif
t Rat
io
SDOF Shear Building
Figure 5.14 – Comparison of maximum drift ratio predictions for SDOF and shear-building models, for example three-storey building under 10/50 and 2/50 SAC and
CUREE ground motions.
CUREE 10/50 CUREE 2/50
SAC 10/50
SAC 2/50

Chapter 5 – Seismic Response Analysis
249
5.4 Stochastic Response Analyses Using Equivalent
Linearisation
5.4.1 Introduction
The previous sections in this chapter have examined the response of single and multi-
level light-frame structures under suites of deterministic earthquake loading.
Statistical measures of the responses such as the median and the 90th percentile have
been used as the basis of the observations and conclusions. These statistical response
measures have been derived in a way analogous to simulation using MCS (see section
4.2.6), by performing multiple deterministic analyses, under randomly chosen site-
specific excitations, and measuring the statistics of the response parameters of
interest, such as median displacement demand.
As described in section 4.2.7, a more computationally efficient method for evaluating
the response statistics of a structural system, under random loading, is offered by the
techniques of RVA. Unfortunately, exact solutions for RVA only exist for linear
systems, and the response of light-frame structures to extreme seismic loadings can be
strongly non-linear. In order to apply the RVA technique to hysteretic systems, such
as those examined in the previous sections, one possible approach is to find some
form of equivalent linear system. ‘Statistically’ equivalent linear systems for the
SDOF and shear-building models have been developed for this work, using the EQL
technique, and are formally outlined in section 4.4.4. EQL is much more
computationally efficient for the calculation of response statistics than MCS, since the
analysis is done in a single pass, whereas MCS techniques require multiple (at least
50) time-history response analyses to obtain reasonably accurate results. The benefits
and limitations of MCS and EQL are discussed in detail in section 4.2.
In the following sections, the application of the SDOF and shear-building models in
RVA using EQL is demonstrated and its accuracy is examined. Response statistics
under stationary white noise excitations are calculated using the EQL technique, and
are then compared with the results from MCS, which are assumed to represent the
‘exact’ response statistics.

Chapter 5 – Seismic Response Analysis
250
5.4.2 Single-Storey Timber-Frame House
To demonstrate applicability and examine the accuracy of the EQL technique, the
response statistics of the hysteretic SDOF model of the test house described in
Chapter 2, and shown in Figure 5.1, were determined using the EQL technique and
also using MCS with 200 simulations. The natural period of the system was set to
T=0.129 seconds, and the equivalent viscous damping ratio was assumed to be 5%.
The excitation used in both the EQL and MCS analyses was a stationary white noise
acceleration of 20 seconds duration, with a power spectral density of S0=0.5 m2/s,
which has a peak value of around 0.5g. Stationary white noise is not a particularly
good representation of real earthquake excitation, because its envelope is relatively
constant throughout the duration compared to an earthquake. This is much more
severe than a real earthquake which usually only contains a short burst of the
maximum acceleration pulses. Since white noise excitation is likely to be more severe
than a real earthquake, it is therefore appropriate for the purposes of demonstrating
the capabilities of the EQL method in predicting the response statistics of a non-linear
system under extreme dynamic loads. Filtering and modulation of the input excitation
into a more realistic form can be incorporated in the model (e.g. Baber, 1980; Baber
and Wen, 1981) if the technique is shown to work for the extreme case.
Comparisons between the EQL and MCS calculated response statistics of the test
house under stationary white noise excitation (max = 0.5g) are given in Figures
5.15(a) to 5.15(d). Figure 5.15(a) to 5.15(c) show that the EQL method, accurately
predicts the standard deviation of the displacement, velocity and hysteretic restoring
force, over the 20 seconds of the excitation. Figure 5.15(d) shows that the EQL
method over-predicts the mean value of the energy dissipated, compared to the
simulation results. An example from the MCS analysis, of the hysteretic response
under 0.5g white noise excitation is given in Figure 5.16. This highlights the non-
linear nature of the response under this level of excitation.
To interpret the physical meaning of the results from the EQL, it is best to think in
terms of the simulation analyses. The standard deviation of the response parameters,

Chapter 5 – Seismic Response Analysis
251
as given on the vertical axis of Figures 5.15(a) to 5.15(c), is the standard deviation,
calculated across the values of all of the 200 responses, at a given point in time. In
the case of displacement response shown in Figure 5.15(a), the standard deviation of
the displacement is increasing as time progresses. This is because the model is
yielding and degrading in strength and stiffness, under the constant amplitude white
noise excitation. The displacements in the individual responses, are therefore
becoming larger and larger as time progresses and hence the variability between the
displacement responses is increasing also. The progression of the standard deviation
of the responses, is similar to the progression of the peak response values versus time.
In fact, the standard deviation is related to the peak. Approximate, but rather complex
methods to calculate the peak value from the standard deviation have been developed
by Davenport (1964), Shinozuka et al. (1968) and Michaelov et al. (2001). The
basic idea can be demonstrated through a simple example.
Under a real suite of random earthquakes, from the same site, and with the same
duration, the standard deviation, and peak value of the response would rise sharply
and then drop off after the strong-motion period of the excitation. To demonstrate this
concept, the standard deviation and envelope of the peak displacement response for
the 20 ordinary ground motions in the CUREE suite are calculated and are shown in
Figure 5.17. The SDOF model used in the analysis is the same as in section 5.3, with
the natural period set to T=0.129 sec and equivalent viscous damping ratio of 5%.
The ground motions were all scaled by a factor of 1.5 to ensure inelastic responses.
These earthquakes are not from the same site or of the same duration, but they all
have strong motion within the first ten seconds of the excitation, and are adequate to
demonstrate the connection between peak value and variability of inelastic responses.
Only the response statistics for the initial 20 seconds are shown in Figure 5.17,
together with polynomial fitted trendlines. It is clear that the peak response is related
to the standard deviation of the response. As a very approximate rule-of-thumb, the
peak value of the response can be approximated as roughly three times the standard
deviation of the response.

Chapter 5 – Seismic Response Analysis
252
0.00
0.04
0.08
0.12
0.16
0.20
0 5 10 15 20
Time (secs)
σσσσdisp (cm)
SimulationEQL
(a) Standard deviation of displacement
0.00
1.00
2.00
3.00
4.00
5.00
6.00
0 5 10 15 20
Time (secs)
σσσσvel (cm/s)
SimulationEQL
(b) Standard deviation of velocity
Figure 5.15 – Comparison of response statistics calculated using Monte-Carlo simulation, and Equivalent Linearisation under stationary white noise excitation (max
= 0.5g) for SDOF model of test house.

Chapter 5 – Seismic Response Analysis
253
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0 5 10 15 20
Time (secs)
σσσσz
SimulationEQL
(c) Standard deviation of hysteretic restoring force
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0 5 10 15 20
Time (secs)
µµµµenergy
SimulationEQL
(d) Mean energy dissipation
Figure 5.15 (cont’d) – Comparison of response statistics calculated using Monte-Carlo simulation, and Equivalent Linearisation under stationary white noise
excitation (max = 0.5g) for SDOF model of test house.

Chapter 5 – Seismic Response Analysis
254
-50-40-30-20-10
01020304050
-1 -0.5 0 0.5 1
Displacement (cm)
Force (kN)
Figure 5.16 – Example of hysteretic response of SDOF model under stationary white noise excitation (max = 0.5g).
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0 5 10 15 20Time (seconds)
Dis
plac
emen
t (cm
)
Peak Response
Standard Deviation Response
Fitted Trendline
(a) Displacement response
Figure 5.17 – Comparison of peak and standard deviation of SDOF model responses under first 20 seconds of CUREE ground motions.

Chapter 5 – Seismic Response Analysis
255
The EQL results given above confirm the findings by Foliente (1993) and Foliente et
al. (1996), which verified the accuracy of the EQL technique, for the modified Bouc-
Wen model, for a range of SDOF systems, except Foliente (1993) obtained better
results for mean energy dissipation (see Fig 5.13(d)). However, the SDOF systems
examined by Foliente were not based on experimental data and were unrealistic in the
values of natural period used (Foliente examined periods of T= 1.0, 3.1 and 7.8
seconds). The current work confirms that with the exception of mean energy
dissipation, the EQL technique is quite accurate for a realistic hysteretic system
representative of a light-frame structure, with parameters determined accurately from
experimental data using system identification. The extension of the EQL scheme to
MDOF systems is addressed in the next section of this chapter.
5.4.3 Three-Storey Timber-Frame Building
The EQL scheme for the SDOF Bouc-Wen differential hysteresis model has been
extended to a MDOF shear-building model in this work. The formulation of the shear-
building model, and the associated EQL scheme is given in detail in section 4.4. To
demonstrate the applicability and examine the accuracy of the EQL technique for the
shear-building model, the response statistics of the example three-storey light-frame
structure described in Figure 5.11, were determined using the EQL technique and also
using MCS with 200 simulations. The natural period of the three-storey building is
T=0.21 seconds, and the equivalent viscous damping ratio is 5%.
As for the SDOF system examined earlier, the excitation used in both the EQL and
MCS analyses was a stationary white noise acceleration, of 20 seconds duration, with
a power spectral density of S0=0.5 m2/s, which has a peak value of around 0.5g. The
response of this structure under this level of excitation produces strongly non-linear
responses.

Chapter 5 – Seismic Response Analysis
256
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0 5 10 15 20
Time (secs)
σσσσdispl (cm)
EQL(1)SIM(1)EQL(2)SIM(2)EQL(3)SIM(3)
(a) Standard deviation of displacement
0
1
2
3
4
5
6
7
8
0 5 10 15 20
Time (secs)
σσσσvel (cm/s)
EQL(1)SIM(1)EQL(2)SIM(2)EQL(3)SIM(3)
(b) Standard deviation of velocity
Figure 5.18 – Comparison of response statistics calculated using Monte-Carlo Simulation, and Equivalent Linearisation under stationary white noise excitation
(max = 0.5g) for example three-storey building.

Chapter 5 – Seismic Response Analysis
257
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0 5 10 15 20
Time (secs)
σσσσz
EQL(1)SIM(1)EQL(2)SIM(2)EQL(3)SIM(3)
(c) Standard deviation of hysteretic restoring force
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0 5 10 15 20
Time (secs)
µµµµenergy
EQL(1)SIM(1)EQL(2)SIM(2)EQL(3)SIM(3)
(d) Mean energy dissipation
Figure 5.18 (cont’d) – Comparison of response statistics calculated using Monte-Carlo simulation, and Equivalent Linearisation under stationary white noise
excitation (max = 0.5g) for example three-storey building.

Chapter 5 – Seismic Response Analysis
258
-150
-100
-50
0
50
100
150
-1.5 -1 -0.5 0 0.5 1 1.5
Inter-Story Displacement - Level 1 (cm)
Force (kN)
-150
-100
-50
0
50
100
150
-1 -0.5 0 0.5 1
Inter-Story Displacement - Level 2 (cm)
Force (kN)
-80-60-40
-200
2040
6080
100
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
Inter-Story Displacement - Level 3 (cm)
Force (kN)
Figure 5.19 – Example of hysteretic response of shear-building model under stationary white noise excitation (max = 0.5g).

Chapter 5 – Seismic Response Analysis
259
Comparisons between the EQL and MCS calculated response statistics of the test
house under stationary white noise excitation (max = 0.5g) are given in Figures
5.18(a) to 5.18(d). Figure 5.18(a) to 5.18(c) show that the EQL method predicts the
standard deviation of the displacement, velocity and hysteretic restoring force, with
reasonable accuracy, for all three storeys in the structure, over the 20 seconds of the
excitation. Figure 5.18(d) shows that the EQL method over-predicts the mean value
of the energy dissipated in the lower floor, compared to the simulation results, but
accurately predicts it in the upper levels in the structure. Examples of the hysteretic
response for each level of the three-storey building, under 0.5g white noise excitation
are given in Figure 5.19, to highlight the non-linear nature of the response of the
building under this level of excitation.
The EQL results for the three-storey example are not quite as good as for the single-
storey case, but approximate the response statistics reasonably well. The results
demonstrate that the technique can be extended to MDOF systems, using the modified
Bouc-Wen hysteresis model, and still produce good results, even for strongly non-
linear systems. If the EQL technique is to be used as a response analysis tool, it
should therefore be extended to include the capability to deal with filtered, modulated
excitation, which is a more realistic representation of earthquake excitation than
stationary white noise.
5.5 Seismic Response Analyses using Hysteretic
Shear-Wall Model
5.5.1 Introduction
Earlier in this chapter, a hysteretic SDOF model was used to predict the response of
the L-shaped test house described in Chapter 2, under earthquake loading appropriate
for Los Angeles site conditions. The SDOF modelling indicated that the response was
sensitive to the assumed natural period and damping of the structure and the ground
motion, and that the level of damage under such earthquakes was highly variable. In a
real house, different parts of the structure may suffer different degrees of damage

Chapter 5 – Seismic Response Analysis
260
under the same earthquake, depending on the layout and configuration of the main
shear-walls. In the test house from Chapter 2, wall W3 is gypsum clad on both sides
and may therefore incur greater damage than other walls at the same displacement
level. Because of this, a more detailed modelling approach, which considers the
individual wall characteristics and the geometry of their layout as well as bi-
directional excitation and response, may be more appropriate for damage prediction in
light-frame construction.
The hysteretic shear-wall model presented in section 4.5 has these analysis
capabilities. In this model, the in-plane characteristics of each wall are represented by
a single modified Bouc-Wen hysteretic element. The out-of-plane stiffness of the
walls is assumed to be negligible and is not considered, and the ceiling and roof
diaphragm is assumed to be rigid compared to the walls and is modelled as a rigid
elastic frame. The hysteretic shear-wall model is used to further examine the seismic
response of the test house in the following sections.
5.5.2 Shear-Wall Model Details
Details of the hysteretic shear-wall model, used to analyse the seismic response of the
test house are summarised in Figure 5.20. The hysteresis parameters for each of the
walls, are given in Table 3.4. Where possible, these parameters were determined from
the experimental data obtained during the destructive testing, via system
identification, as outlined in Chapter 3. The cyclic loading in the destructive test was
applied in one direction only, and as a result, the response of the cross walls (walls
W5 to W9), and in particular the central cross-walls (Walls W6 to W8), was much
smaller than the four in-plane walls (walls W1 to W4). Because of this, the ultimate
load was estimated for these walls, based on the data for the other walls, and using the
perforated shear-wall method (NAHBRC, 2000). A comparison between the model
and experimental responses, for each of the walls in the house, in isolation, are given
in Figures 3.20 to 3.25. The model fit for all of the walls is very good, in terms of
both hysteresis shape, and dissipated energy.

Chapter 5 – Seismic Response Analysis
261
The stiffness matrix for the model, [K], and the hysteretic matrix, [H], are assembled
using a stiffness-based finite-element approach. Only the hysteretic springs, which
represent the walls, have hysteresis parameters associated with them. The frame
which makes up the ceiling diaphragm is assumed to be elastic, and rigid. This
assumption is not generally valid, as it was shown in section 2.6.5 that the roof and
ceiling diaphragm was not completely rigid compared to the walls. However, it is a
convenient assumption, because the diaphragm flexibility cannot be modelled simply,
due to the complex geometry of the roof system. The aim here is to develop a
relatively simple model, and it is shown later, in section 5.5.3, that this simplistic
approach can still produce reasonable results. More accurate representation of the
roof and ceiling diaphragm can be incorporated in the FE model described in section
4.6.
In accordance with the aim of creating a relatively simple model, the internal walls
were assumed to be rigidly connected to the roof and ceiling diaphragm even although
this was not the case for the test house. This assumption is reasonable for small levels
of load, because in a ‘real’ house the plasterboard lining on the walls is connected to
the ceiling plasterboard using tape and plaster (or glued ‘cornices’ in some cases).
This in effect establishes a rigid connection between the ceiling diaphragm and all the
walls. Thus, internal non-bracing partition walls, which do not normally have a solid
connection to the diaphragm, become engaged in resisting lateral loads applied to the
house. However for very large loadings, the integrity of this non-structural connection
may degrade. These effects are best modelled using a more sophisticated FE model.
The mass matrix used in the model, [M], is diagonal, with the masses lumped at the
nodes, which are at the intersection points of the ceiling-level frame. The mass matrix
is derived from the experimental dead load distribution, which is shown in Figure
2.10. The distribution and the self-weight, as used in the shear-wall model is shown
in Figure 5.20. The damping matrix, [C], is based on an assumption of Rayleigh
damping, with 5% damping in the first two modes, and is defined by Eq. (5.1).
[C] = a1[M] + a2[K] (5.1)

Chapter 5 – Seismic Response Analysis
262
The shear-wall model is configured for both uni- and bi-directional excitation and
response. Under uni-directional excitations, only the Y direction (North-South) is
considered. A summary of the natural frequencies and associated Rayleigh damping
coefficients, a1 and a2, for both uni- and bi-directional models is given in Table 5.10.
The only difference between the two models is in the mass matrix. The mass matrix
for the bi-directional model has masses associated with both translational degrees of
freedom at each node. The uni-directional model only has masses associated with the
Y direction (North-South) translational degrees of freedom. The reason for using two
different configurations of the model in this analysis, is to compare the effect on
response prediction of using uni-directional excitation, with that when using bi-
directional excitation. This was also required so that both the SAC and CUREE
ground motions could be used in the shear wall model analysis. The CUREE ground
motion suite contains single direction records only, whereas the SAC suite contains
pairs of orthogonal records.
It should be noted that the fundamental natural frequencies of the house model, in
Table 5.10, are quite different to the measured values derived from the dynamic
impact testing in section 2.5. This is because the natural frequencies derived from the
dynamic impact testing are based on the initial tangent stiffness of the house (see
Table 2.7), and are quite unreliable for dynamic modelling purposes (see section
2.5.3). In the model, the wall stiffness values, as given in Table 3.4, are derived from
the system identification process.
Table 5.10 – Natural frequencies and associated Rayleigh damping coefficients for hysteretic shear-wall model.
1st mode 2nd mode a 1 a 2
Uni-directional model
(North-South only)
T=0.12 sec
F=8.3 Hz
(NS Racking)
T=0.067 sec
F=14.83 Hz
(Torsional)
3.34 0.0007
Bi-directional model
T=0.14 sec
F=7.17 Hz
(NS Racking)
T=0.115 sec
F=8.72 Hz
(EW Racking)
2.47 0.001

Chapter 5 – Seismic Response Analysis
263
4 60 35
40
40
45
N
S
EW
N
S
EW
20
2.7 4.7 4.2 4.7
3.3 6.1 4.0 8.2
4.4 3.0 5.5
T (N-S) = 0.12 sec T (E-W) = 0.14 sec Damping = 5%Weight = 50.8 kN
Weight at nodes (kN)
Initial wall stiffness
(kN/cm)
Fault-ParallelExcitation
Fault-NormalExcitation X
YZ
X
YZ
Figure 5.20 – Details of shear-wall model for single-storey test house.

Chapter 5 – Seismic Response Analysis
264
They are calculated such that the best-fit hysteresis trace is obtained over the entire
response (not just at the origin), and have little to do with the initial tangent stiffness,
because the hysteresis is non-linear from the origin. The model wall stiffness values
are therefore much smaller than the tangent stiffness, and hence the frequencies of the
model are much lower than those measured from the impact tests. The frequencies
given in Table 5.10 are consistent with field measurements and reasonable for the
type of house considered (Foliente and Zacher, 1994), whereas the frequencies from
the dynamic impact testing may be unreliable (see section 2.5.3).
5.5.3 Comparison Between Shear-Wall Model and Experimental Responses
In order to predict the damage status of the different walls in a light-frame structure, a
structural model must first be able to predict the load path within the structure.
Because of this fact, one of the major objectives of this project was to measure the
load path in the test house described in Chapter 2, and then develop and validate
models which could predict this load path, including a FE model. The aim of the
analysis presented in the following is to verify that the hysteretic shear-wall model
described in section 4.5 is capable of predicting the load path measured during the
destructive experiment from Chapter 2, and its evolution under cyclic loading.
To compare the load-path determined in the experiment, with that predicted by the
model, a static-cyclic load was applied to the model, in the X-direction (North-South)
only, to walls W3 and W4, as was done in the destructive experiment. The load was
applied very slowly in the model, as in the experiment, to eliminate any dynamic
response. However it was applied as a cyclic force, rather than as a cyclic
displacement (as was the case in the experiment). This allowed the diaphragm to
rotate as a rigid body, in a similar manner to the experiment, so as to compare the
model predictions with the experimental results in a more meaningful way. If
displacements were applied to walls W3 and W4, then Walls W1 to W4 would have
experienced identical displacements due to the rigid diaphragm.

Chapter 5 – Seismic Response Analysis
265
The percentage of the total applied load, which is resisted by each of the four in-plane
shear-walls (walls W1 to W4) was then calculated at the maximum displacement
point of each loading cycle, and compared with the values measured during the
experiment. Figure 5.21 shows the comparison between the measured and predicted
load distribution to each of the four in-plane walls. The accuracy of the model
prediction for all of the walls is reasonably good, especially given the simplicity of the
model compared to the complexity of the highly redundant system which it is
representing. The results are accurate to within 10% of total load, for displacements
up to 5cm, which is the approximate displacement at maximum load. Importantly, the
model predicts the trend of the progression of the load distribution as the structural
behaviour progresses well into the inelastic range, although after the 5cm
displacement level, when the inelastic behaviour is extreme, the predicted values are
not as accurate.
The intuitive physical interpretation of these model results agrees with the
observations from the experiment. Initially the model predicts that the stiffest wall,
which is the doubly gypsum clad wall W3, resists most of the applied loading. This
wall is the most brittle, so its contribution drops off quickly, after which, the load
resisted by the three more ductile walls (W1, W2, W4) increases accordingly. There
is a slight discrepancy between the experimental and model responses, in the initial
proportion of total load resisted by wall W2. There are two possible sources for this
discrepancy. Firstly, the ceiling diaphragm is not rigid (see section 2.6.5), as was
assumed in the model, and secondly, the relative initial values of the stiffness of each
of the walls could be in error.
Given that the model-predicted results are reasonably good, the assumption of a rigid
roof and ceiling diaphragm in the model seems to be reasonable for this particular
case. This, however, may not be the case for all roof and ceiling diaphragms in
light-frame construction, and cannot be extrapolated to multi-level construction,
where the floor diaphragms may be much more flexible in-plane than the roof and
ceiling system in the test house. Further experimentation and modelling to determine
the effects of the diaphragm rigidity upon building performance and response
prediction are warranted.

Chapter 5 – Seismic Response Analysis
266
0%
10%
20%
30%
40%
50%
60%
0 2 4 6 8 10 12Displacement (cm)
Rea
ctio
n Fo
rce
W4 (test) W3 (test) W2 (test) W1 (test)W4 (model) W3 (model) W2 (model) W1 (model)
Figure 5.21 – Comparison of model prediction and experimental results for distribution of in-plane reaction forces in walls W1-W4 under static-cyclic loading.
5.5.4 Comparison Between Shear-Wall Model and SDOF Model Responses
Earlier in this chapter, a hysteretic SDOF model was used to predict the seismic
performance of the L-shaped test house. The SDOF model was based on the global
response data which was obtained during the cyclic testing from Chapter 2. As
described in the previous section, the shear-wall model is also based on the
experimental data, but at the level of individual wall response, rather than global
response. In this section, the SDOF and shear-wall modelling approaches are
compared, by subjecting each model type to the same suites of ground motions, and
then comparing the peak displacement response predictions from each. The shear-
wall model used in this comparison is outlined in section 5.5.2, and shown in Figure
5.20. The SDOF model used is the T=0.129 sec system, with 5% equivalent viscous
damping ratio outlined in section 5.3.

Chapter 5 – Seismic Response Analysis
267
Figure 5.22 shows the comparison between maximum predicted displacement demand
from the shear-wall and SDOF models. Only the North-South-direction responses
were considered, and the displacement for the shear-wall model was calculated as the
average displacement of the four main walls in that direction (walls W1-W4). The
average was used in this case, to be consistent with the underlying basis of the SDOF
model, which is derived from averaged data. Comparison of the hysteretic responses
from the SDOF and the shear-wall model (averaged), for selected cases are shown in
Figure 5.23.
It was demonstrated in section 5.3 that the SDOF model is not accurate for global
response prediction of multi-level construction, compared to a MDOF model.
However, Figures 5.22 and 5.23 show that the SDOF model does a reasonably good
job of predicting the maximum global displacement demand of the more detailed
single-storey shear-wall model, under uni-directional excitation, at all response levels
considered. Among the responses which are significantly inelastic, the average error is
8% and the worst case error is 20%. This indicates that a SDOF model, which
accurately incorporates pinching and degrading hysteretic behaviour, may be used as
an approximate tool for studying the global seismic response of single-storey houses.
This level of accuracy, compared to the more complex model, given its simplicity,
means that it can be confidently used in sensitivity and simulation analyses, such as
those in section 5.3, to examine general response trends and determine global
response statistics from a suite of excitations.
It is shown in the following sections, however, that the responses of individual walls
can be quite different to the average global response calculated using a SDOF model,
and that response predictions can also differ depending on whether uni- or bi-
directional excitation is used in the analysis.

Chapter 5 – Seismic Response Analysis
268
0.0
0.2
0.4
0.6
0.8
1.0su
p1
sup2
sup3
nor2
nor3
nor4
nor5
nor6
nor9
nor1
0
lp1
lp2
lp3
lp4
lp5
lp6
cm1
cm2
lan1
lan2
lp89
lex
nr94
rrs
nr94
new
h
kb95
kobj
kb95
tato
mh8
4cyl
d
Earthquake
Shear Wall SDOFMax. Displ (cm)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
la01
la02
la03
la04
la05
la06
la07
la08
la09
la10
la11
la12
la13
la14
la15
la16
la17
la18
la19
la20
Earthquake
Shear Wall SDOFMax. Displ (cm)
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
la21
la22
la23
la24
la25
la26
la27
la28
la29
la30
la31
la32
la33
la34
la35
la36
la37
la38
la39
la40
Earthquake
Shear Wall SDOFMax. Displ (cm)
Figure 5.22 – Comparison between displacement demand prediction from shear-wall model and SDOF model under 10/50 and 2/50 CUREE and SAC ground motions.
CUREE 10/50 CUREE 2/50
SAC 10/50
SAC 2/50

Chapter 5 – Seismic Response Analysis
269
-100
-75
-50
-25
0
25
50
75
100
-2 -1 0 1 2Displacement (cm)
Load (kN)
ShearWall Model
-100
-75
-50
-25
0
25
50
75
100
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2Displacement (cm)
Load (kN)
SDOF Model
(a) LA12 Earthquake
-100
-75
-50
-25
0
25
50
75
100
-3 -2 -1 0 1 2 3Displacement (cm)
Load (kN)
ShearWall Model
-100
-75
-50
-25
0
25
50
75
100
-3 -2 -1 0 1 2 3Displacement (cm)
Load (kN)
SDOF Model
(b) LA32 Earthquake
Figure 5.23 – Comparison of averaged response from walls W1 to W4 in shear-wall model with response from SDOF model, for selected ground motions.

Chapter 5 – Seismic Response Analysis
270
5.5.5 Comparison Between Shear-Wall Model Response Under Uni-
Directional and Bi-Directional Excitations
The SAC ground motion suite contains earthquake records with both fault-normal and
fault-parallel components. In this section, the shear-wall model is used to compare
the response predictions under uni- and bi-directional excitations. In the bi-
directional response analyses the building was oriented as shown in Figure 5.20. The
fault-normal records (odd-numbered) were applied in alignment with the North-
South-direction, and the fault-parallel (even-numbered) records were applied in the
East-West-direction. The predicted North-South-direction responses for walls W1-W4
were then averaged, and compared to the results where only the fault-normal
component of the excitation was applied (in the North-South-direction). The results
are shown in Figure 5.24.
The main interest is in comparing the responses which are significantly inelastic
(LA11, 19, 29, 31, 35, 41, 53 and 55). Among these cases, the uni-directional
response predictions can be either smaller (eg. LA11, 19, 29, 31, 35) or larger (eg.
LA41, 53, 55) than the bi-directional predictions. This indicates that a general
correction cannot be applied to the uni-directional results. The average error for
these cases is 18% and the worst case error is 28%. It is therefore concluded that to
minimise this source of error in seismic response prediction for single-storey light-
frame structures, if possible, bi-directional excitation should be used in the analysis.
5.5.6 Analysis of Seismic Demands on Individual Walls Under Bi-Directional
Earthquakes
The analysis in section 5.5.3 showed that the shear-wall model, was able to
reasonably predict the load path in the test house, as measured in the destructive
experiment, well into the inelastic range under cyclic loading. This indicates that the
model should be capable of predicting individual wall responses under severe
earthquake loading. The aim of this section is to examine the response of the
individual walls of the test house under bi-directional seismic excitation.

Chapter 5 – Seismic Response Analysis
271
0
0.5
1
1.5
2
2.5
la01
la03
la05
la07
la09
la11
la13
la15
la17
la19
Earthquake
Uni-Directional Excitation Bi-Directional ExcitationMax. Displ (cm)
0
1
2
3
4
5
la21
la23
la25
la27
la29
la31
la33
la35
la37
la39
Earthquake
Uni-Directional Excitation Bi-Directional ExcitationMax. Displ (cm)
0
0.5
1
1.5
2
la41
la43
la45
la47
la49
la51
la53
la55
la57
la59
Earthquake
Uni-Directional Excitation Bi-Directional ExcitationMax. Displ (cm)
Figure 5.24 – Comparison between displacement demand predictions, averaged for
walls W1 to W4, under bi-directional and uni-directional SAC ground motions.
SAC 10/50
SAC 2/50
SAC 50/50

Chapter 5 – Seismic Response Analysis
272
The shear-wall model outlined earlier was subjected to the three different sets of fault-
normal – fault-parallel earthquake pairs in the SAC ground motion suite,
corresponding to probability of exceedance of 10%, 2% and 50% in 50 years.
Individual wall responses, in terms of maximum displacement demand under these
earthquakes are given in Figure 5.25. The predicted hysteresis responses of the
individual walls are shown in Figure 5.26, for the la32 ground motion.
Figure 5.25 shows the displacement demand of the individual walls, under the 10/50,
2/50 and 50/50 SAC earthquakes. This highlights that the different walls within the
structure may have vastly different levels of displacement demand, under the same
earthquake, due to the bi-directional and torsional nature of the response. Animations
of the displacement response time history also highlight this. Under particular
earthquakes (e.g. la27-28, la41-42 & la49-50) some walls in the house respond in the
elastic range, while others respond well into the inelastic range (assuming 0.8cm
displacement indicates transition into inelastic response). Large variation in the
maximum wall response occurs even for walls with the same orientation. This
highlights the fact that there is a torsional component to the response, due to the
structural eccentricity. This variability within the structure indicates that the averaged
response for a given direction, which is the basis of a SDOF model, may not be a
good indicator for individual wall response. This variability can be due to three
factors: 1) the bi-directional nature of the ground motion; 2) the different stiffness and
hysteretic characteristics of the individual walls; and 3) the eccentricity resulting from
differing centre of gravity and stiffness. These are therefore important considerations
when trying to predict damage in a light-frame structure under seismic loading.
The displacement demand results also highlight the large variability of the predicted
displacement demand, even within each of the earthquake ‘probability’ groups. This
again confirms the importance of characterising the variability in the ground motion,
in order to accurately characterise the variability in the response.
Figure 5.27 shows the load distribution predicted by the shear-wall model under a real
earthquake, rather than an arbitrary cyclic load. The transition of the load distribution
under the earthquake, follows a similar trend to that observed in the experiment. (i.e.

Chapter 5 – Seismic Response Analysis
273
as the more heavily loaded walls approach their capacity, and begin to respond
inelastically, their load is redistributed to the other parallel walls).
The most commonly used techniques for lateral load distribution in light-frame
structures (NAHBRC, 2000) do not allow for any lateral load-redistribution between
the walls in the structure (see section 1.5). It has been demonstrated here that it may
be appropriate to include this effect into the seismic design procedures of the future.
Full understanding of the lateral load distribution and sharing under seismic loading
will eventually lead to safer and more economical light-frame structures.
Although the plots in Figure 5.25 highlight some interesting characteristics of the bi-
directional seismic response of a light-frame structure, it is difficult to pick any trends
due to the large variability of the response data, which is due to variation in the
ground motion. In order to highlight the trends, and to quantify the demand of
individual walls under the SAC ground motions, the median and 90th percentile
displacement demands of the individual walls were calculated and are shown in
Figures 5.28 and 5.29.

Chapter 5 – Seismic Response Analysis
274
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
la01,02 la03,04 la05,06 la07,08 la09,10 la11,12 la13,14 la15,16 la17,18 la19,20Earthquake
Max Displ (cm) W1 W2 W3 W4 W5 W678 W9
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
la21,22 la23,24 la25,26 la27,28 la29,30 la31,32 la33,34 la35,36 la37,38 la39,40Earthquake
Max. Displ (cm) W1 W2 W3 W4 W5 W678 W9
0.00.20.40.60.81.01.21.41.61.8
la41,42 la43,44 la45,46 la47,48 la49,50 la51,52 la53,54 la55,56 la57,58 la59,60
Earthquake
Max. Displ (cm) W1 W2 W3 W4 W5 W678 W9
Figure 5.25 – Displacement demand for individual walls, under bi-directional SAC ground motions.
SAC 10/50
SAC 2/50
SAC 50/50

Chapter 5 – Seismic Response Analysis
275
-8-6-4-202468
-6 -4 -2 0 2 4 6
Displacement (cm)
Force (kN)
W1
-30
-20
-10
0
10
20
30
-6 -4 -2 0 2 4
Displacement (cm)
Force (kN)
W2
-40-30-20-10
0102030
-3 -2 -1 0 1 2 3
Displacement (cm)
Force (kN)
W3
-40-30-20-10
010203040
-2 -1 0 1 2 3
Displacement (cm)
Force (kN)
W4
-30
-20
-10
0
10
20
30
-10 -5 0 5 10
Displacement (cm)
Force (kN)
W5
-30
-20
-10
0
10
20
30
-6 -4 -2 0 2 4
Displacement (cm)
Force (kN)
W678
-40-30-20-10
010203040
-6 -4 -2 0 2 4
Displacement (cm)
Force (kN)
W9
Figure 5.26 – Predicted in-plane hysteresis responses of individual walls under bi-directional la32 ground motion.

Chapter 5 – Seismic Response Analysis
276
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20 25 30 35 40
Displacement (mm)
% o
f X R
eact
ion
W1 W2 W3 W4
(a) North-South walls, W1-W4
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20 25 30 35 40
Displacement (mm)
% o
f Y R
eact
ion
W5 W678 W9
(b) East-West Walls, W5-W9
Figure 5.27 – Distribution of load to individual walls under la32 ground motion.

Chapter 5 – Seismic Response Analysis
277
0
0.5
1
1.5
2
2.5
W1 W2 W3 W4 W5 W678 W9
Max
imum
Dis
plac
emen
t (cm
)
50%/50yr 10%/50yr 2%/50yr
Figure 5.28 – Median of displacement demands from shear-wall model, for individual
walls, under bi-directional SAC ground motions.
0
1
2
3
4
5
6
W1 W2 W3 W4 W5 W678 W9
Max
imum
Dis
plac
emen
t (cm
)
50%/50yr 10%/50yr 2%/50yr
Figure 5.29 – 90th percentile of displacement demands from shear-wall model, for
individual walls, under bi-directional SAC ground motions.

Chapter 5 – Seismic Response Analysis
278
Figures 5.28 and 5.29 show the median and 90th percentile, respectively, of the
displacement demand on individual walls. The displacements on the East-West
oriented walls (walls W5 to W9) are generally higher at both the median and the 90th
percentile demand level. These walls are aligned with the fault-parallel component of
the earthquakes. As a group, the East-Wast walls have a slightly higher stiffness than
the North-South walls, but have a slightly lower load capacity.
At the median demand level, only the 2/50 earthquakes result in inelastic
displacement demands, except for the gypsum clad wall W3, which has a much lower
elastic limit. At the 90th percentile response level the 10/50 and 2/50 earthquakes
generally do exhibit an inelastic response, and the 50/50 earthquakes generally do not.
These results again highlight the robustness of this type of structure to resist seismic
loads without danger of collapse. It is only under the more severe earthquakes that
significant damage is likely to be incurred.
5.6 Summary and Conclusions
This chapter presented the results of deterministic and stochastic seismic response
analyses, and sensitivity studies, using models of the single-storey L-shaped house
described in Chapter 2, and a model of an example three-storey light-frame structure.
The results were based on two different suites of ground-motions. The key points and
findings are summarised below, partitioned in accordance with the structure of this
chapter.
5.6.1 Sensitivity Study of Single-Storey House Using SDOF Model
• A hysteretic SDOF model of the test house from Chapter 2, was used to
examine the sensitivity of the assumed structural period, equivalent viscous
damping, and ground motion on the seismic response under CUREE and SAC
ground motion suites. The range of period, damping, and ground motion used
were consistent with the range of ‘reasonable’ values which are appropriate for

Chapter 5 – Seismic Response Analysis
279
the L-shaped test house. The range of predicted damage states from the
analyses ranged from completely undamaged to severely damaged.
• The main features of the results were that the predicted displacement demands,
at the 90th percentile levels, using a SDOF model of the single-storey test
house were:
1. Up to 150% higher for a T=0.15 sec model than for a T=0.13 sec.
model. Given the variability in stiffness and mass of the type of structure
examined, these are both reasonable values of period for the test house.
2. Up to 190% higher for a system with 2% equivalent viscous
damping ratio compared to a system with 10%. Based on the available
data, it can be argued that these are both reasonable viscous damping
values for the test house.
3. Up to three times higher under the SAC ground motions than for
the corresponding CUREE ground motions. The ground motion suites are
both deemed appropriate for Los Angeles site conditions, and were scaled
for the same target response spectra (firm soil) but for different period
ranges. The response difference can be explained by the differing
characteristics of the records selected for the suites.
• The sensitivity study highlights the importance of quantifying variability in
model parameters and excitations, and including it in seismic response
modelling.
5.6.2 Response Analysis of Example Three-Storey Building Using Shear-
Building Model
• The global response of an example three-storey light-frame building with
period T=0.21 sec. and equivalent viscous damping ratio of 5%, were
determined under the SAC and CUREE ground motions. The predicted inter-
storey displacement demands were highly variable, and larger than for the
single-storey test house. This finding is consistent with the observations from

Chapter 5 – Seismic Response Analysis
280
the damage in timber-frame buildings observed after the Northridge
earthquake, which showed that the type of multi-storey building examined was
potentially vulnerable.
• The displacement demands for the example three-storey building were also
calculated using an equivalent SDOF model (T=0.21 sec damping = 5%). It
was shown that the SDOF model can either over-predict the response by up to
150% or under-predict by up to 73%. This highlights that it is important to
characterise the vertical distribution of mass and stiffness when studying the
seismic performance of multi-level light-frame construction, and demonstrates
that analysis methods which are dependent on assumed SDOF behaviour
should be used with caution.
5.6.3 Stochastic Response Analysis Using Equivalent Linearisation
• The applicability and accuracy of the EQL technique for highly inelastic
SDOF systems was examined. The response statistics of the hysteretic SDOF
model of the test house, under 20-second duration white-noise excitations
(max 0.5g), were determined using the EQL technique and also using MCS
(200 simulations). The natural period of the system was set to T=0.129
seconds, and the equivalent viscous damping ratio was assumed to be 5%.
• It was shown that the EQL method, accurately predicts the standard deviation
of the displacement, velocity and hysteretic restoring force, but over-predicts
the mean value of the energy dissipated, when compared to the simulation
results. This confirmed earlier findings by Foliente (1993) and Foliente et al.
(1996), but for a more realistic system, with appropriate natural frequency for
a light-frame structure, and hysteresis parameters determined accurately from
experimental data using system identification.
• The EQL scheme for the SDOF Bouc-Wen differential hysteresis model was
extended to a MDOF shear-building model in Chapter 4. The applicability and
accuracy of the EQL technique for the MDOF shear-building model, under 20-

Chapter 5 – Seismic Response Analysis
281
second duration white noise excitations was examined. The response statistics
of an example three-storey light-frame structure (T=0.21 sec, damping = 5%)
were determined using the EQL technique and also using MCS (200
simulations).
• It was shown that the EQL method, predicts the response statistics of a MDOF
system reasonably accurately, when compared to the simulation results. The
results demonstrate that the EQL technique can be extended to MDOF
systems, using the modified Bouc-Wen hysteresis model, and still produce
good results, even for strongly non-linear systems. It is recommended that the
method be extended to include filtered, modulated excitations, to more
realistically represent earthquakes than stationary white noise.
5.6.4 Response Analysis of Test House Using Shear-Wall Model
• A hysteretic shear-wall model was used to examine the response of individual
walls of the test house under earthquake loading. The model is constructed of
hysteretic elements, which represent each of the walls, and assumes a rigid
roof and ceiling diaphragm. The shear-wall model was configured for both
uni- and bi-directional response analysis. A fundamental period of T=0.12 sec
was used for the uni-directional model, and T=0.14 sec for the bi-directional
model. Rayleigh damping of 5% in the first two modes was assumed.
• The shear-wall model was validated using the results of the static-cyclic
destructive testing presented in Chapter 2. A static-cyclic load was applied to
the model, at walls W3 and W4, as was done in the destructive experiment.
The percentage of the total applied load, which was resisted by each of the
four in-plane shear-walls was compared with the values measured during the
experiment. The accuracy of the model prediction was reasonably good
(within 10% up to ultimate load), especially given the simplicity of the model,
compared to the complexity of the highly redundant system which it is
represents. Given that the model-predicted results are reasonably good, the
assumption of a rigid roof and ceiling diaphragm in the model seems to be

Chapter 5 – Seismic Response Analysis
282
reasonable. This, however, cannot be extrapolated to other single-level
configurations or multi-level construction, where the diaphragms may be
much more flexible in-plane than in the test house examined herein.
• Global response estimates for the single-storey test house, using SDOF and
shear-wall modelling approaches were compared, by subjecting each model to
the same suites of ground motions. It was demonstrated that the SDOF model
does a reasonably good job of predicting the global displacement demand
compared to the more detailed model, under uni-directional excitation. The
average error between the results was 8% and the worst case error, 20%. This
indicates that a SDOF model, which accurately incorporates pinching and
degrading hysteretic behaviour, may be used as an approximate tool for
studying the global seismic response of single-storey houses. It was
highlighted that the SDOF model cannot however be used to predict individual
wall response.
• The shear-wall model was used to compare global displacement demand
predictions under uni- and bi-directional excitations. It was shown that the
predicted demands under uni-directional excitations, can be either smaller or
larger than predictions under bi-directional excitations. This indicates that a
general correction cannot be applied to the uni-directional analyses. The
average error was 18% and the worst case error was 28%.
• The shear-wall model was used to examine individual wall responses under
the bi-directional SAC ground motions, in terms of maximum displacement
demand. The analysis highlighted that different walls within the structure may
have very different levels of displacement demand, under the same
earthquake, due to the bi-directional and torsional nature of the response.
Under particular earthquakes, some walls in the house respond in the elastic
range, while others respond well into the inelastic range. Large variation in
wall displacement demand occurs even between walls with the same
orientation. This variability within the structure indicates that the averaged

Chapter 5 – Seismic Response Analysis
283
response for a given direction, which is the basis of a SDOF model, may not
be a good indicator of individual wall response.
• Under bi-directional SAC excitations, at the median demand level, only the
2/50 earthquakes result in inelastic displacement levels. At the 90th percentile
response level, the 10/50 and 2/50 earthquakes generally do exhibit a moderate
inelastic response, and the 50/50 earthquakes generally do not. These results
highlight the robustness of this type of structure to resist seismic loads without
danger of collapse. It is only under the more severe earthquakes that
significant damage is likely to be incurred.

Chapter 5 – Seismic Response Analysis
284

Chapter 6 – Summary, Conclusions and Recommendations
285
CHAPTER 6
Summary, Conclusions and
Recommendations
6.1 Key Findings
This thesis has presented the results of experimental and analytical investigations into
the performance of light-frame structures under lateral loading (particularly seismic
loading), and a review of the literature relevant to the research. The specific aims of
this research were to: 1) develop simple, experimentally validated numerical models
of light-frame structures, which can be used to predict their performance under
seismic loading; and 2) collect experimental data suitable for validation of detailed
finite-element models of light-frame structures.
To meet these aims, a series of full-scale experiments were conducted on a single-
storey L-shaped timber-frame house. In these experiments, the distribution of the
reaction forces underneath the walls, and the displaced shape of the house were
measured in detail under static and static-cyclic loading. Analytical models of light-
frame structures, were then developed and validated against the experimental results,
and then used to conduct sensitivity and response analysis studies.
The key findings from the experimental and analytical work are as follows:
• The experimental results have provided the most detailed picture of the
reaction forces underneath a non-symmetrical light-frame structure under
lateral loading ever recorded. They have shown that there is potential for
significant load-sharing and redistribution between the external shear-walls of
a light-frame house under both elastic and inelastic response conditions.

Chapter 6 – Summary, Conclusions and Recommendations
286
Under current practice, the most commonly used design techniques for lateral
load distribution in light-frame structures do not accommodate any load-
sharing or redistribution between the walls in the structure.
• The analytical modelling results have shown that relatively simple modelling
strategies can be used to simulate the load-sharing and redistribution
characteristics that were observed in the experiments with reasonable
accuracy. The importance of the interaction between the shear-walls, and the
effect of this interaction on performance prediction was also highlighted by the
modelling work. The results showed that the single-storey test house is highly
unlikely to collapse under earthquake loading due to direct shaking, even for a
large event, but could sustain significant damage. It was demonstrated that the
inherent uncertainties due to the random nature of seismic excitation, and the
assumptions in the modelling process, have a significant effect on the
predicted performance of light-frame structures.
• A modified Bouc-Wen hysteresis model was shown to be a powerful tool for
simulating the load-displacement and energy dissipation characteristics of real
light-frame structures and components, when used in tandem with system
identification. It was also shown that system identification techniques can be
used to determine hysteresis model parameters based on multiple optimisation
criteria, and on multiple experimental data (with different excitations)
simultaneously.
• An Equivalent Linearisation technique, based on a modified Bouc-Wen SDOF
model, was extended to a MDOF shear-building model. This technique can be
used as a faster alternative to MCS, for estimating the response statistics of
multi-storey hysteretic structures, under white-noise excitations, even for
highly non-linear light-frame systems, which exhibit strong pinching and
degradation characteristics.

Chapter 6 – Summary, Conclusions and Recommendations
287
6.2 Detailed Summary and Conclusions
6.2.1 Introduction
A complete summary of the findings presented in this thesis is given in the following
sections. The summary is partitioned in accordance with the structure of the thesis.
6.2.2 Full-Scale Experiments on L-Shaped Test-House
A review of the general behaviour of light-frame systems, and full-scale testing of
light-frame structures was presented. A program of full-scale experiments, conducted
on a single-story L-shaped timber-frame house was then described, and the results
presented. Three types of experiments were conducted:
• elastic tests under a variety of small point loads
• vibration-based dynamic impact tests
• a destructive test under reverse static-cyclic lateral loading
On the basis of the experimental results, the following conclusions can be drawn.
Elastic Testing:
Small point loads, less than 10 kN, were applied to the walls of the house at the
ceiling level, in different configurations, and the displaced shape and the distribution
of the reaction forces under elastic response conditions were measured in detail. It
was found that significant load-sharing and redistribution occurs between the external
shear-resisting walls in the house under elastic response conditions. When a
concentrated load was applied to a single wall, the load was distributed to the non-
loaded external walls, mainly through the roof and ceiling diaphragm. Between 19%
and 78% of the applied load can be shared by the rest of the structure, depending on
the structural configuration and connection detail to the roof and ceiling diaphragm.
Commonly used techniques for lateral load distribution in light-frame structures do
not consider any load-sharing or redistribution.

Chapter 6 – Summary, Conclusions and Recommendations
288
In one of the elastic tests, a uniform displacement field was applied to all four North-
South walls (i.e. walls W1 to W4) until the applied load reached 90% of a hurricane
level design wind load. Under this loading, the response of the structure was
essentially elastic with no damage observed. The results of this test indicate that the
type of house tested should easily withstand this design wind load with minimal or no
structural damage. It is important to highlight that this conclusion is based purely on
the lateral wind load to the walls and does not consider uplift pressure on the roof.
Dynamic Impact Testing:
The natural racking-mode frequencies of the house in the North-South and East-West
directions were obtained by measuring the acceleration response and spectral
characteristics from dynamic impact tests. Tests were conducted before and after the
elastic tests to check for signs of damage. Before the elastic tests, the natural
frequencies determined from the dynamic tests were 13.6 and 14.8 Hz (T=0.074 and
0.075 sec) for the North-South and East-West directions, respectively. After the
elastic tests, the North-South direction frequency had changed to 13.3Hz (T=0.075
sec), with a slightly wider spectral peak than before, indicating slight damage.
However, the change in dynamic characteristics was only small, and may be within
the error bound in this type of experiment.
Calculations of the natural frequency in the North-South direction, derived using the
stiffness from the initial load-cycles of the destructive testing, and the measured mass
of the structure, agree with the value determined from the vibration tests. This
indicated that the global dynamic response exhibits SDOF-type behaviour with all of
the mass lumped at the ceiling level.
Destructive Testing:
Identical static-cyclic displacements up to +/-120mm, were applied at the ceiling level
of the house, on one side of the house, in the North-South direction. The displaced
shape and the distribution of forces throughout the structure under the inelastic
response were measured in detail. The global hysteresis response of the house, and of

Chapter 6 – Summary, Conclusions and Recommendations
289
all the individual walls, is characterised by ductile behaviour, ‘pinching’ at the origin,
and degradation of the strength and stiffness under cyclic loading. The roof and
ceiling diaphragm in the house behaved as a flexible diaphragm under the applied
loading, and absorbed some energy due to hysteretic response, but compared to the
walls it was relatively rigid. The total strength capacity of the house, in the direction
of loading, was around 100 kN with maximum capacity being reached at about 30mm
displacement. Beyond the maximum strength capacity, the house resisted 80 kN at
80mm displacement and 70 kN at 110mm displacement, indicating this type of
construction is highly ductile and not prone to sudden collapse.
As the applied load was increased on walls W3 and W4, the percentage of the load
resisted by walls W1 and W2 also increased, even though no load was applied to these
walls. The applied load was redistributed into these walls mainly via the roof and
ceiling diaphragm. The distribution of the load throughout the structure, changed
significantly during the experiment, with the amount of load resisted by each sub-
system depending on the level of applied displacement, and the structural integrity of
the other subsystems. This was due to the highly ductile nature of the structure.
Under the small loads in the initial stages of the destructive test, 4% of the total in-
plane load was taken by the out-of-plane walls. At peak load, this value increased to
around 9%, and increased further to a maximum of 12% beyond the peak load.
6.2.3 Hysteresis Modelling and System Identification
A general overview of hysteresis modelling and system identification techniques, in
the context of light-frame structures was presented. A modified Bouc-Wen
differential hysteresis element was presented and reviewed in detail. The modified
Bouc-Wen model has pinching and strength and stiffness degradation functions to
accurately simulate the behaviour of light-frame structural components under cyclic
loading.
The GRG method of system identification was used to determine the parameters for
the modified Bouc-Wen hysteresis model, for different experimental data sets, taken

Chapter 6 – Summary, Conclusions and Recommendations
290
from the literature, and for the results of the destructive experiment presented herein.
The model-computed hysteresis closely matched the experimental data in all cases, in
terms of both the hysteresis shape, and energy dissipation.
A ‘parallel’ system identification approach was outlined and illustrated through two
examples. It was demonstrated that a single set of hysteresis model parameters could
be satisfactorily fitted to two different experimental data sets simultaneously, where
the two different data sets were derived from identical test specimens under different
applied loading. The first example involved a timber-frame shear-wall, which was
tested ‘pseudo-dynamically’ under displacement response time histories, obtained
from dynamic analyses using two different scalars of the Northridge earthquake. The
second example involved a Japanese-style timber shear-wall, which was tested under
static-cyclic and then pseudo-dynamic earthquake loading. The feasibility of this
technique, and the implications for analytical modelling and performance prediction
warrant further study, as this finding may have implications for future analytical
modelling and laboratory testing strategies.
6.2.4 Structural Modelling
An overview of seismic response analysis techniques and a review of whole-building
structural modelling of light-frame structures was presented. Hysteretic SDOF and
shear-building models of light-frame structures, which incorporate differential Bouc-
Wen hysteresis elements, were formulated and implemented in computer programs.
These models are suitable for prediction of global responses under uni-directional
earthquake excitations.
An EQL scheme, formulated for the hysteretic SDOF model by Foliente (1993), was
extended to a MDOF shear-building model. This technique can be used as a faster
alternative to MCS, to estimate the response statistics of multi-storey structures, under
white-noise-based excitations.
A hysteretic shear-wall model of a light-frame structure was formulated and
implemented in a computer program. The model incorporates differential Bouc-Wen

Chapter 6 – Summary, Conclusions and Recommendations
291
hysteresis elements to represent individual walls, and is suitable for prediction of
individual wall responses under bi-directional excitations.
A FE modelling strategy, based on work by Kasal (1992), and a hybrid modelling
strategy, for seismic response analysis of light-frame structures was outlined. The
hybrid modelling strategy facilitates the transition from global to local response
predictions, complex to simple models, and from the deterministic domain to the
stochastic domain.
6.2.5 Seismic Response Analysis
The analytical models were used to conduct sensitivity studies, and deterministic and
stochastic response analyses of the single-storey L-shaped test house, and an example
three-storey light-frame structure. Two different suites of ground-motions used in the
analyses were outlined. The first suite was developed for the CUREE project and is
specifically targeted at timber structures. The second suite was developed for the SAC
steel project and is targeted at steel buildings.
SDOF Model Analyses:
The hysteretic SDOF model of the test house was used to examine the sensitivity of
the assumed structural period, equivalent viscous damping, and ground motion on the
predicted seismic response under CUREE and SAC ground motion suites. The range
of period, damping, and ground motion used were consistent with the range of
‘reasonable’ values which are appropriate for the L-shaped test house. The main
features of the results, were that the predicted displacement demands, at the 90th
percentile level using a SDOF model of the single-storey test house were:
1. Up to 150% higher for a T=0.15 sec model than for a T=0.13 sec. model.
Given the variability in stiffness and mass for the type of structure examined,
these are both reasonable values of fundamental period for the test house.
2. Up to 190% higher for a system with 2% equivalent viscous damping ratio
compared to a system with 10%. Based on the available data, it can be argued

Chapter 6 – Summary, Conclusions and Recommendations
292
that these are both reasonable equivalent viscous damping values for the test
house, although this depends on the structural and hysteresis model used.
3. Up to three times higher under the SAC ground motions than for the
corresponding CUREE ground motions. The ground motion suites are both
deemed appropriate for Los Angeles site conditions, and were scaled for the
same target response spectra (firm soil), but for different period ranges. The
response difference can be explained by the differing characteristics of the
records selected for the suites.
The sensitivity study highlighted the importance of quantifying variability in model
parameters and excitations, and including it in seismic response modelling.
Shear-Building Model Analyses:
The global response of an example three-storey light-frame building was determined
under the SAC and CUREE ground motions. The predicted inter-storey displacement
demands were highly variable, and larger than for the single-storey test house. This
finding is consistent with the observations from the damage in timber-frame buildings
observed after the Northridge earthquake, which showed that multi-storey light-frame
buildings with a soft lower storey were vulnerable. The displacement demands for the
example three-storey building were also calculated using an equivalent SDOF model.
It was shown that the SDOF model can either over-predict the response by up to
150% or under-predict by up to 73%. This highlighted the importance of
characterising the vertical distribution of mass and stiffness when studying the seismic
performance of multi-level light-frame construction, and demonstrated that analysis
methods which are dependent on assumed SDOF behaviour should be used with
caution.
Stochastic Response Analyses:
The applicability and accuracy of the EQL technique for highly inelastic SDOF
systems was examined. The response statistics of the hysteretic SDOF model of the
test house, under 20-second duration white-noise excitations (max 0.5g), were
determined using the EQL technique and also using MCS (200 simulations). It was

Chapter 6 – Summary, Conclusions and Recommendations
293
shown that the EQL method, accurately predicts the standard deviation of the
displacement, velocity and hysteretic restoring force, but over-predicts the mean value
of the energy dissipated, when compared to the simulation results. This confirmed
earlier findings by Foliente (1993) and Foliente et al. (1996), but for a more realistic
system, with appropriate natural frequency for a light-frame structure, and hysteresis
parameters determined accurately from experimental data using system identification.
The accuracy of the EQL technique for the MDOF shear-building model, under 20-
second duration white noise excitations was also examined. The response statistics of
an example three-storey light-frame structure were determined using the EQL
technique and also using MCS (200 simulations). It was shown that the EQL method,
predicts the response statistics of a MDOF system reasonably accurately, when
compared to the simulation results. The results demonstrate that the EQL technique
can be extended to MDOF systems, using the modified Bouc-Wen hysteresis model,
and still produces good results, even for strongly non-linear systems. It is
recommended that the method be extended to include filtered, modulated excitations,
to more realistically represent earthquakes than stationary white noise.
Shear-Wall Model Analyses:
A hysteretic shear-wall model was used to examine the response of individual walls of
the test house under earthquake loading. The model was constructed of hysteretic
elements, which represent each of the walls, and assumed a rigid roof and ceiling
diaphragm. The shear-wall model was configured for both uni- and bi-directional
response analysis.
The shear-wall model was validated using the results of the static-cyclic destructive
testing. A static-cyclic load was applied to the model, at walls W3 and W4, as was
done in the destructive experiment. The percentage of the total applied load, which
was resisted by each of the four North-South shear-walls was compared with the
values measured during the experiment. The accuracy of the model prediction was
reasonably good (within 10% up to ultimate load), especially given the simplicity of
the model, compared to the complexity of the highly redundant system which it
represents. Given that the model-predicted results are reasonably good, the

Chapter 6 – Summary, Conclusions and Recommendations
294
assumption of a rigid roof and ceiling diaphragm in the model for this particular house
seems to be reasonable. This however cannot be extrapolated to other single-level
configurations or multi-level construction, where the diaphragms may be much more
flexible in-plane than in the test house examined herein.
Global response estimates for the single-storey test house, using SDOF and shear-wall
modelling approaches were compared, by subjecting each model type to the same
suites of ground motions. It was demonstrated that the SDOF model does a
reasonably good job of predicting the global displacement demand of the single-story
house, compared to the more detailed model, under uni-directional excitation. The
average error between the results was 8% and the worst case error, 20%. This
indicated that a SDOF model, which accurately incorporates pinching and degrading
hysteretic behaviour, may be appropriate for studying the global seismic response of
single-storey houses.
The shear-wall model was used to compare global displacement demand predictions
under uni- and bi-directional excitations. It was shown that the predicted demands
under uni-directional excitations, can be either smaller or larger than predictions
under bi-directional excitations. This indicated that a general correction cannot be
applied to the uni-directional analyses. The average error was 18% and the worst
case error was 28%.
The shear-wall model was then used to examine individual wall responses under the
bi-directional SAC ground motions, in terms of displacement demand. The analysis
highlighted that different walls within the structure may have different levels of
displacement demand, under the same earthquake, due to the bi-directional and
torsional nature of the response. Under particular earthquakes, some walls in the
house respond in the elastic range, while others respond well into the inelastic range.
Large variation in wall displacement demand occurs even between walls with the
same orientation. This variability within the structure indicated that the averaged
response for a given direction, which is the basis of a SDOF model, may not be a
good indicator of individual wall response.

Chapter 6 – Summary, Conclusions and Recommendations
295
Under bi-directional SAC excitations, at the median demand level, only the 2/50
earthquakes result in inelastic displacement levels, and the walls generally reach no
more than half their load capacity. At the 90th percentile response level, the 10/50 and
2/50 earthquakes generally do exhibit an inelastic response, and the 50/50 earthquakes
generally do not. These results highlighted the robustness of this type of structure to
resist seismic loads without danger of collapse. It is only under the more severe
earthquakes that significant damage is likely to be incurred.
6.3 Recommendations for Further Research
The findings presented in this thesis have pointed towards a number of areas that
warrant further study. These are summarised below.
• A limitation of the experimental work is that all the observations are based on
an unfinished house, which consists of the structural elements only and the
plasterboard lining. Inclusion of the non-structural elements in the experiment
(i.e., tapes in the corner joints of interior panel materials, cornices or similar
‘non-structural’ links between roof and wall panels, windows, doors, exterior
wall finish) may alter the initial load paths at small levels of displacement, and
may alter the inelastic behaviour as well. The presence of the non-structural
finishes may also alter the apparent damage status of the structure while
increasing the strength and stiffness. This should be addressed by testing a
finished house to compare and enhance the results presented here. The results
from tests on a finished house can be used to better interpret observed damage
to similar houses in past earthquakes.
• The results of the experimental work also give an insight into how the shear-
walls behave when they are part of a whole structure. Since the current
practice for shear-wall design and analysis is based on isolated wall testing, it
is recommended to test the four main shear-walls W1 to W4 as isolated walls,
in order to examine the link between the isolated wall and the whole system
responses.

Chapter 6 – Summary, Conclusions and Recommendations
296
• The results from the destructive experiment showed that the roof and ceiling
diaphragm was slightly flexible, but relatively rigid compared to the walls. In
the analytical modelling however, the roof diaphragm was assumed to be
completely rigid, yet it still predicted the experimentally determined load-
distribution reasonably well. This cannot necessarily be extrapolated to other
single-level configurations or multi-level construction, where the diaphragms
may have different characteristics than in the test house examined herein. It is
therefore recommended that the effect of the assumed diaphragm rigidity on
response predictions, for a range of different light-frame configurations should
be examined through analytical modelling.
• The literature on hysteresis modelling indicates that there is no general
agreement regarding the effects of hysteretic pinching and degradation on
predicted system response. Some studies have highlighted circumstances
where the hysteresis assumptions can have a significant impact on response
predictions. Comprehensive studies need to be undertaken to determine when
it is appropriate to use simplified hysteresis models, and when it is advisable
to use a more complex model.
• The feasibility of a ‘parallel’ system identification technique was
demonstrated. A single set of hysteresis model parameters was satisfactorily
fitted to two different experimental data sets simultaneously, where the two
different data sets were derived from identical test specimens under different
applied loading. The application of this technique warrants further study as it
may have implications for future analytical modelling and laboratory testing
strategies. It may well be the case that it is preferable to perform repeat
experiments (e.g. on isolated shear-walls) using different loading protocols, so
that a more powerful predictive model can be fitted to the results, using
parallel system identification.
• In this thesis, it was shown that the EQL technique can be extended to MDOF
systems, using the modified Bouc-Wen hysteresis model. The EQL technique

Chapter 6 – Summary, Conclusions and Recommendations
297
still produced good estimates of response statistics for MDOF systems, under
white-noise excitations, even for strongly non-linear systems. It is therefore
recommended that the method be extended to include filtered, modulated
excitations, to more realistically represent earthquakes than stationary white
noise.
• Finally, It is recommend that a three-dimensional FE model be fully calibrated
for this type of house and if possible for another house with a different
configuration than the current test house. Once validated, the FE model, in
combination with the analytical models presented herein, can be used to
conduct sensitivity studies for a wide range of practical house configurations.
This is needed to provide general recommendations for lateral force
distribution in light-frame buildings.

Chapter 6 – Summary, Conclusions and Recommendations
298

Chapter 7 – References
299
CHAPTER 7
References
AFPA. 1995. Wood Frame Construction Manual for One- and Two-Family Dwellings
- SBC High Wind Edition. American Forest & Paper Association. Washington, DC.
Alavi, B. and H. Krawinkler. 1999. Structural Design Implications of Near-Fault
Ground Motion. Kajima-CUREE Research Report 1999.12.
Andreason, K. R. and J. D. Rose. 1994. Northridge California Earthquake: Structural
Performance of Buildings in San Fernando Valley, California. APS Report T94-5.
American Plywood Association, Tacoma, WA.
Andreasson, S. 2000. "Three-Dimensional Interaction in Stabilisation of Multi-Storey
Timber Frame Building Systems." Licentiate Thesis, Lund University, Lund, Sweden.
ASCE. 2000. ASCE 7-98 - Minimum Design Loads for Buildings and Other
Structures. American Society of Civil Engineers. Reston, VA.
Aschheim, M. and E. Black. 1999. "Effects of Prior Earthquake Damage on Response
of Simple Stiffness-Degrading Structures." Earthquake Spectra 15(1):1-24.
Aschheim, M. A., J. P. Moehle, and A. Lynn. 1998. "Earthquake Performance
Assessment of Concrete Structures." Progress in Structural Engineering and
Materials 1(4):370-377.
Baber, T. T. 1980. "Stochastic Equivalent Linearization for Hysteretic, Degrading,
Multistory Structures." PhD Thesis, University of Illinois at Urbana-Champaign, Ann
Arbor, MI.

Chapter 7 – References
300
Baber, T. T. and Y.-K. Wen. 1981. "Random Vibration of Hysteretic Degrading
Systems." Journal of the Engineering Mechanics Division ASCE 107(EM6):1069-89.
Baber, T. T. and M. Noori. 1985. "Random Vibration of Degrading Pinching
Systems." Journal of Engineering Mechanics 111(8):1010-1026.
Baber, T. T. and M. Noori. 1986. "Modelling General Hysteresis Behaviour and
Random Vibration Application." Journal of Vibration, Acoustics, Stress and
Reliability in Design ASME 108:411-20.
Barton, A. D. 1997. "Performance of Steel Framed Domestic Structures Subjected to
Earthquake Loads." PhD Thesis, Department of Civil and Environmental Engineering,
University of Melbourne, Australia.
Beck, J. L., J. F. Hall, and V. S. Camelo. 2001. Dynamic Characteristics of
Woodframe Structures. CUREE-Caltech Woodframe Project - Task 1-3-3. CUREE,
Richmond, CA.
Biot, M. A. 1958. "Linear Thermodynamics and the Mechanics of Solids." Pp. 1-18 in
Proceedings of the 3rd US National Congress of Applied Mechanics. ASME, New
York, NY.
Bouc, R. 1967. "Forced Vibration of Mechanical Systems With Hysteresis." Proc. 4th
Conference on Nonlinear Oscillations (Extended Abstract). Praga. 1967.
Boughton, G. N. 1988. "Full Scale Structural Testing of Houses Under Cyclonic Wind
Loads." Pp. 2-82-88 in Proceedings of the 1988 International Conference on Timber
Engineering. Forest Products Research Society, Madison, WI.
Branstetter, L. J., G. D. Jeong, and J. T. P. Yao. 1988. "Mathematical Modelling of
Structural Behaviour During Earthquakes." Probabilistic Engineering Mechanics
3(3):130-145.

Chapter 7 – References
301
Building Seismic Safety Council. 1997. NEHRP Recommended Provisions for
Seismic Regulations for New Buildings and Other Structures. Part 2: Commentary.
FEMA, Building Seismic Safety Council, Washington DC.
Capecchi, D. 1991. "Periodic Response and Stability of Hysteretic Oscillators."
Dynamics and Stability of Systems 6(2):89-106.
Carr, A. J. 1998. RUAUMOKO. University of Canterbury. Christchurch, New
Zealand.
Carydis, P. G. and E. A. Vougioukas. 1989. "Full Scale Dynamic Test of a Two
Storied Timber Frame Construction House Using a 6-DOF Earthquake Simulator."
European Earthquake Engineering III(2):17-21.
Casciati, F. 1989. "Stochastic Dynamics of Hysteretic Media." Structural Safety
6:259-69.
Ceccotti, A. and A. Vignoli. 1989. "A Pinching Hysteretic Model for Semirigid
Joints." European Earthquake Engineering Journal 3:3-9.
Ceccotti, A., M. Follesa, and E. Karacabeyli. 2000. "3D Seismic Analysis of Multi-
Storey Woodframe Construction." P. 1.2.3 in Proceedings of the World Conference
on Timber Engineering (CD-Rom). British Columbia, Canada.
Charnes, A. and W. W. Cooper. 1957. "Nonlinear Power of Adjacent Extreme Point
Methods in Linear Programming." Econometrica 25:132.
Cho, W. S. T. 2000. Nonlinear Random Vibration - Analytical Techniques and
Applications. Swets & Zeitlinger. Netherlands.
Chopra, A. K. 1995. Dynamics of Structures, Theory and Applications to Earthquake
Engineering. Prentice Hall. New Jersey.

Chapter 7 – References
302
Chopra, A. K. and C. Kan. 1973. "Effects of Stiffness Degradation on Ductility
Requirements for Multistory Buildings." Earthquake Engineering and Structural
Dynamics 2:35-45.
Chopra, A. K. and R. K. Goel. 1999. "Capacity Demand - Diagram Methods Based on
Inelastic Design Spectrum." Earthquake Spectra 15(4):637-56.
Clough, R. W. and J. Penzien. 1993. Dynamics of Structures. McGraw- Hill Book Co.
New York, NY.
Cobeen, K. 1997. "Seismic Design of Low-Rise Light-Frame Wood Buildings --
State-of-the-Practice and Future Directions." Pp. 24-35 in Earthquake Performance
and Safety of Timber Structures. Ed. G. C. Foliente. Forest Products Society,
Madison, WI.
Crandell, J. and S. McKee. 2000. "Performance of Wood-Frame Housing in Hurricane
Andrew and an Evaluation of Roof Component Reliability in Typical U.S. Wind
Climates." Pp. 55-66 in Wind Safety and Performance of Wood Buildings. Ed. G. C.
Foliente and B. Kasal. Forest Products Society, Madison, WI .
CUREE. 2001. Proceedings of the International Benchmark Workshop. UCSD,
California. June 15. CUREE, Richmond, CA.
Davenport, A. G. 1964. "Note on the Distribution of the Largest Value of a Random
Function With Application to Gust Loading." Proceedings of the Institute of Civil
Engineers 28:187-96.
Deam, B. L. 2000. "Rating Seismic Bracing Elements for Timber Buildings." P. 2304
in Proceedings of the 12th World Conference on Earthquake Engineering (CD-Rom).
Auckland, New Zealand. NZSEE, New Zealand.
Dean, J. A., B. L. Deam, and A. H. Buchanan. 1989. "Earthquake Resistance of
Timber Structures." NZ Journal of Timber Construction 5(2):12-16.

Chapter 7 – References
303
Dolan, J. D. 1989. "The Dynamic Response of Timber Shear Walls." PhD Thesis,
Department of Civil Engineering, University of British Columbia, Vancouver, BC,
Canada.
Dorey, D. B. and W. R. Schriever. 1957. "Structural Test of a House Under Simulated
Wind and Snow Loads." Pp. 29-49 in ASTM Special Technical Report No. 210.
Dowrick, D. J. 1986. "Hysteresis Loops for Timber Structures." Bulletin of New
Zealand National Society of Earthquake Engineering 19(20):143-52.
Fajfar, P. 1999. "Capacity Spectrum Method Based on Inelastic Spectra." Earthquake
Engineering and Structural Dynamics 28:979-93.
Fardis, M. N. 1991. "Member-Type Models for the Non-Linear Seismic Response
Analysis of Reinforced Concrete Structures." Pp. 247-80 in Experimental and
Numerical Methods in Earthquake Engineering. Eds. J. Donea and P. M. Jones.
Kluwer Academic Publishers, Dordrecht, The Netherlands.
Ferry-Borges, J. and M. Castanheta. 1971. Structural Safety. LNEC. Lisbon, Portugal.
Fischer, D., A. Filiatrault, B. Folz, C-M. Uang, and F. Seible. 2001. Shake Table
Tests of a Two-Story Woodframe House. CUREE Publication No. W-06. CUREE,
Richmond, CA.
Foliente, G. C. 1993. "Stochastic Dynamic Response of Wood Structural Systems."
PhD Thesis, Virginia Polytechnic Institute and State University, Blacksburg, Virginia.
Foliente, G. C. 1995. "Hysteresis Modeling of Wood Joints and Structural Systems."
ASCE Journal of Structural Engineering 121(6):1013-22.
Foliente, G. C. 1997a. "Modelling and Analysis of Timber Structures Under Seismic
Loading - State of the Art." Pp. 55-73 in Earthquake Performance and Safety of
Timber Structures. Ed. G. C. Foliente. Forest Products Society, Madison, WI.

Chapter 7 – References
304
Foliente, G. C. 1997b. "Timber Structures in Seismic Regions - General Overview
and Research Needs." Pp. 3-23 in Earthquake Performance and Safety of Timber
Structures. Ed. G. C. Foliente. Forest Products Society, Madison, WI.
Foliente, G. C. 1998. "Design of Timber Structures Subject to Extreme Loads."
Progress in Structural Engineering and Materials 1(3):236-44.
Foliente, G. C. 2000. "Developments in Performance-Based Building Codes and
Standards." Forest Products Journal 50(7/8):11-21.
Foliente, G. C. and E. G. Zacher. 1994. "Performance Tests of Timber Structural
Systems Under Seismic Loads." Pp. 21-86 in Analysis Design and Testing of Timber
Structures Under Seismic Loads - Proceedings of a Research Needs Workshop. Ed.
Greg C. Foliente. University of California Forest Products Laboratory, Richmond,
CA.
Foliente, G. C., M. P. Singh, and M. N. Noori. 1996. "Equivalent Linearization of
Generally Pinching Hysteretic, Degrading Systems." Earthquake Engineering and
Structural Dynamics 25:611-29.
Foliente, G. C., E. Karacabeyli, and M. Yasumura. 1998a. "International Test
Standards for Joints in Timber Structures Under Earthquake and Wind Loads." Pp. T-
222-6 in Proceedings of the Structural Engineers World Congress (SEWC '98 - CD-
Rom). Elselvier Science, New York, NY.
Foliente, G. C., P. J. Paevere, and F. Ma. 1998b. "Parameter Identification and
Seismic Response Analysis of Timber Structures." Pp. 2-532-539 in Proceedings of
the 5th World Conference on Timber Engineering. Presses Polytechniques et
Universitaires Romandes, Lausanne, Switzerland.
Foschi, R. O. 2000. "Modeling the Hysteretic Response of Mechanical Connections
for Wood Structures." P. 7.1.2 in Proceedings of the World Conference on Timber
Engineering (CD-Rom). British Columbia, Canada.

Chapter 7 – References
305
Freeman, S. A. 1978. Prediction of Response of Concrete Buildings to Severe
Earthquake Motion. Publication SP-55. American Concrete Institute, Detroit, MI.
Gad, E. F. 1997. "Performance of Brick-Veneer Steel-Framed Domestic Structures
Under Earthquake Loading." PhD Thesis, Department of Civil and Environmental
Engineering, University of Melbourne, Australia.
Gad, E. F., C. F. Duffield, D. S. Mansell, and G. L. Hutchinson. 1998. Vibration
Testing of Full Sized Cold-Formed Steel-Framed Houses. Research Report
RR/Struct/01/98. University of Melbourne, Australia.
Gupta, A. K. and G. P.-H. Kuo. 1987. "Modeling of Wood-Framed House." Journal
of Structural Engineering 113(2):260-278.
Hall, J. F. 1996. "Wood Buildings." Pp. 125-76 in Earthquake Spectra - Supplement C
to Volume 11, January 1996 Earthquake Reconnaissance Report, Vol. 2. Technical
Editors W. T. Holmes and P. Somers. Earthquake Engineering Research Institute,
Oakland, CA.
Hall, J. F. 2000. "The CUREe-Caltech Woodframe Project." P. 7.1.1 in Proceedings
of the World Conference on Timber Engineering (CD-Rom). British Columbia,
Canada.
He, M., F. Lam, and R. O. Foschi. 2001. "Modeling Three-Dimensional Timber
Light-Frame Buildings." Journal of Structural Engineering 127(8):901-13.
Himmelblau, D. M. 1972. Applied Nonlinear Programming. McGraw-Hill. New
York.
Holzer, S. M. 1985. Computer Analysis of Structures - Matrix Structural Analysis and
Structured Programming. Elselvier Science Publishing Co. New York, NY.
Hurst, H. T. 1965. The Wood Frame House As a Structural Unit. Tech. Rep No. 5.
National Forest Products Association, Washington, DC.

Chapter 7 – References
306
Imai, H., C.-B. M. O. Yun, and M. Shinozuka. 1989. "Fundamentals of System
Identification in Structural Dynamics." Probabilistic Engineering Mechanics
4(4):162-73.
ISO. 2000. Timber Structures - Joints Made With Mechanical Fasteners - Quasi-Static
Reversed-Cyclic Test Method. ISO/WD 16670.3, Working Draft of ISO TC
165/SC/WG7. International Organization for Standardization, Geneva, Switzerland.
Iwan, W. D. 1966. "A Distributed-Element Model for Hysteresis and Its Steady State
Dynamic Response." Journal of Applied Mechanics 33(42):893-900.
Iwan, W. D. and N. C. Gates. 1979. "The Effective Period and Damping of a Class of
Hysteretic Structures." Earthquake Engineering and Structural Dynamics 7:199-211.
Karacabeyli, E. and A. Ceccotti. 1998. "Nailed Wood-Frame Shear Walls for Seismic
Loads: Test Results and Design Considerations." Pp. T-207-6 in Proceedings of
Structural Engineers World Congress SEWC'98 (CD-Rom). Elselvier Science, New
York, NY.
Kasal, B. 1992. "A Nonlinear Three-Dimensional Finite-Element Model of a Light-
Frame Structure." PhD Thesis, Oregon State University, Corvallis, OR.
Kasal, B. and Leichti. 1992. "Incorporating Load Sharing in Shear Wall Design of
Light-Frame Structures." ASCE Journal of Structural Engineering 118(2):3350-3361.
Kasal, B., R. J. Leichti, and R. Y. Itani. 1994. "A Nonlinear Finite-Element Model of
a Complete Light-Frame Wood Structure." ASCE Journal of Structural Engineering
120(1):100-119.
Kasal, B. and H. Xu. 1997. "A Mathematical Model of Connections With Nonlinear
Nonconservative Hysteretic Behaviour." Pp. 105-7 in Earthquake Performance and
Safety of Timber Structures. Ed. G. C. Foliente. Forest Products Society, Madison,
WI.

Chapter 7 – References
307
Kasal, B., M. Collins, G. C. Foliente, and P. J. Paevere. 1999. "A Hybrid
Deterministic and Stochastic Approach to Inelastic Modeling and Analysis of Light
Frame Buildings." Proceedings of the RILEM Symposium on Timber Engineering.
Stockholm, Sweeden. 13-15 September.
Kawai, N. 1998. "Pseudo-Dynamic Tests on Shear Walls." Pp. 1-412-419 in
Proceedings of the 5th World Conference on Timber Engineering. Presses
Polytechniques et Universitaires Romandes, Lausanne, Switzerland.
Khon, M. C. 1987. Practical Numerical Algorithms and Programs. Macmillan
Publishing Co. New York, NY.
Kircher, C., R. Reitherman, R. Whitman, and C. Arnold. 1997. "Estimation of
Earthquake Losses to Buildings." Earthquake Spectra 13(4).
Koerner, B. D., R. J. Schmidt, J. R. Goodman, and W. D. Richins. 2000. "Lateral
Load Testing and Analysis of Manufactured Homes." P. 2.1.1 in Proceedings of the
World Conference on Timber Engineering (CD-Rom). British Columbia, Canada.
Kohara, K. and K. Miyazawa. 1998. "Full-Scale Shaking Table Tests of Two Story
Wooden Houses." Pp. 2-548-555 in Proceedings of the 5th World Conference on
Timber Engineering. Presses Polytechniques et Universitaires Romandes, Lausanne,
Switzerland.
Krawinkler, H. 1995. "New Trends in Seismic Design Methodology." Pp. 2-821-830
in Proceedings of the 10th European Conference on Earthquake Engineering.
Balkema, Rotterdam.
Krawinkler, H. and G. D. P. K. Seneviratna. 1998. "Pros and Cons of a Pushover
Analysis of Seismic Performance Evaluation." Engineering Structures 20(4-6):452-
64.
Krawinkler, H., F. Parisi, L. Ibarra, A. Ayoub, and R. Medina. 2001. Development of
a Testing Protocol for Woodframe Structures. CUREE Publication No. W-02.
CUREE, Richmond, CA.

Chapter 7 – References
308
Kunnath, S. K., J. B. Mander, and L. Fang. 1997. "Parameter Identification for
Degrading and Pinched Hysteretic Structural Concrete Systems." Engineering
Structures 19(3):224-32.
Kuo, P.-H. G. 1989. "A Three-Dimensional Macro-Element Model for Wood-Framed
Buildings." PhD Thesis, North Carolina state University, Raleigh, North Carolina.
Lasdon, L. S., A. D. Warren, A. Jain, and M. Ratner. 1978. "Design and Testing of a
Generalized Reduced Gradient Code for Nonlinear Programming." ACM Transactions
on Mahematical Software 4(1):34-50.
Loh, C. and R. Ho. 1990. "Seismic Damage Assessment Based on Different
Hysteretic Rules." Earthquake Engineering and Structural Dynamics 19:753-71.
MacKenzie, C. 2000. "The Development of Prescriptive Design Manuals for High
Wind Housing in Australia." Pp. 35-54 in Wind Safety and Performance of Wood
Buildings. Ed. G. C. Foliente and B. Kasal. Forest Products Society, Madison, WI.
Madan, A., A. M. Reinhorn, J. Mander, and R. Valles. 1997. "Modelling of Masonry
Infill Panels for Structural Analysis." Journal of Structural Engineering
123(10):1295-302.
Mahin, S. A. and V. V. Bertero. 1981. "An Evaluation of Inelastic Seismic Design
Spectra." Journal of the Structural Division, ASCE 107(ST9):1777-95.
Maldonado, G. O., M. P. Singh, F. Casciati, and L. Fervelli. 1987. Stochastic
Response of Single Degree of Freedom Hysteretic Oscillators. Technical Report -
NSF Grant CEE-8412830. Virginia Polytechnic Institute and State University,
Blacksburg, VA.
Melchers, R. E. 1999. Structural Reliability Analysis and Prediction. John Wiley &
Sons Ltd. West Sussex, England.
Mettupalayam, V. S. and A. M. Reinhorn. 2000. "Hysteretic Models for Deteriorating
Inelastic Structures." Journal of Engineering Mechanics 126(6):633-40.

Chapter 7 – References
309
Michaelov, G., L. D. Lutes, and S. Sarkani. 2001. "Extreme Value Response to
Nonstationary Excitation." Journal of Engineering Mechanics 127(4):352-63.
Moehle, J. P., J.-A. Browning, Y. R. Li, and A. Lynn. 1997. "A Performance
Assessment for a Reinforced Concrete Frame Building." Proceedings of the
Northridge Earthquake Research Conference. Los Angeles, CA.
Moss, P. J. and A. J. Carr. 1987. "Seismic Response of Low-Rise Timber Buildings."
Pp. 153-64 in Proceedings of the Pacific Conference on Timber Engineering. New
Zealand. 5-8 August.
Mostaghel, N. 1999. "Analytical Description of Pinching, Degrading Hysteretic
Systems." Journal of Engineering Mechanics 125(2):216-24.
NAHBRC. 2000. Residential Structural Design Guide: 2000 Edition - A State-of-the-
Art Review and Application of Engineering Information for Light-Frame Homes,
Apartments and Townhouses. U.S. Department of Housing and Urban Development,
Washington, DC.
Newmark, N. M. 1959. "A Method of Computation for Structural Dynamics." Journal
of the Engineering Mechanics Division, ASCE 85:67-94.
Office of Emergency Services and EQE International. 1995. The Northridge
Earthquake of January 17, 1994: Report of Data Collection and Analysis. Governor's
Office of Emergency Services, Sacramento, CA.
Ohashi, Y., I. Sakamoto, and M. Kimura. 1998. "Shaking Table Tests of a Real Scale
Wooden House Subjected to Kobe Earthquake." Pp. 2-556-563 in Proceedings of the
5th World Conference on Timber Engineering. Lausanne, Switzerland.
Paevere, P. J. and G. C. Foliente. 1999. "Hysteretic Pinching and Degradation Effects
on Dynamic Response and Reliability." Pp. 771-79 in Proceedings of the Eighth
International Conference on the Application of Statistics and Probability. Sydney.
12-15 December. Ed. R. E. Melchers and M. G. Stewart. A.A. Balkema, Rotterdam.

Chapter 7 – References
310
Park, Y. J., A. M. Reinhorn, and S. K. Kunnath. 1987. IDARC: Inelastic Damage
Analysis of Reinforce Concrete Frame - Shear-Wall Structures. Technical Report
NCEER-87-0008. State University of New York, Buffalo.
Phillips, T. L. 1990. "Load Sharing Characteristics of Three-Dimensional Wood
Diaphragms." M.S. Thesis, Washington State University, Pullman, WA.
Phillips, T. L., R. Y. Itani, and D. I. McLean. 1993. "Lateral Load Sharing by
Diaphragms in Wood-Framed Buildings." ASCE Journal of Structural Engineering
119(5):1556-71.
Pradlwarter, H. J. and G. I. Schueller. 1999. "Assessment of Low Probability Events
of Dynamical Systems by Controlled Monte Carlo Simulation." Probabilistic
Engineering Mechanics 14:213-27.
Reardon, G. F. 1986. Simulated Cyclone Wind Loading of a Brick Veneer House.
Technical Report No. 28. James Cook Cyclone Structural Testing Station, QLD,
Australia.
Reardon, G. F. 1990. Simulated Cyclone Wind Loading of a Nu-Steel House.
Technical Report No. 36. James Cook Cyclone Structural Testing Station, QLD,
Australia.
Reardon, G. F. and D. Henderson. 1996. "Simulated Wind Loading of a Two Storey
Test House." Pp. 4-313-319 in Proceedings of the International Wood Engineering
Conference. New Orleans, LA. Ed. V. K. A. Gopu.
Reardon, G. F. and M. Mahendran. 1988. Simulated Cyclone Wind Loading of a
Melbourne Style Brick Veneer House. Report No. 34. James Cook Cyclone Structural
Testing Station, QLD, Australia.
Richins, W. D., J. M. Lacy, T. K. Larson, T. E. Rahl, J. R. Goodman, R. J. Schmidt,
B. D. Koerner, and A. K. Pandey. 2000. "Full-Scale Structural Testing of a Single-
Wide Manufactured Home." P. P34 in Proceedings of the World Conference on
Timber Engineering (CD-Rom). British Columbia, Canada.

Chapter 7 – References
311
Roberts, J. B. and P. D. Spanos. 1990. Random Vibration and Statistical
Linearization. John Wiley & Sons Ltd. West Sussex, England.
Robinson, A., P. Sanders, and J. Wilson. 1999. "Lateral Loading and Earthquake
Response Factors for Precast Concrete Load-Bearing Panel Structures." Proceedings
of Concrete 99: Our Concrete Environment. Eds. D. Beweja, S. Bernard, R. Wheen,
and P. Sha. Concrete Institute of Australia, Australia.
Schmidt, R. J. and R. C. Moody. 1989. "Modeling of Laterally Loaded Light-Frame
Buildings." Journal of Structural Engineering 115(1):201-17.
Seible, F. and G. R. Kingsley. 1991. "Modeling of Concrete and Masonry Structures
Subjected to Seismic Loading." Pp. 281-88 in Experimental and Numerical Methods
in Earthquake Engineering. Ed. J. Donea and P. M. Jones. Kluwer Academic
Publishers, Dordrecht, The Netherlands.
Seo, J.-M., I.-K. Choi, and J.-R. Lee. 1999. "Experimental Study on the Aseismic
Capacity of a Wooden House Using Shaking Table." Earthquake Engineering and
Structural Dynamics 28:1143-62.
Shepherd, R. 1996. "Standardized Experimental Testing Procedures for Low-Rise
Structures." Earthquake Spectra 12(1).
Shinozuka, M. 1972. "Monte Carlo Solution of Structural Dynamics." Computers &
Structures 2:855-74.
Shinozuka, M., H. Itagaki, and M. Hakuno. 1968. "Dynamic Safety Analysis of
Multistory Buildings." Journal of the Structural Division, ASCE 94(ST1):309-30.
Sivaselvan, M. V. and A. M. Reinhorn. 1999. Hysteretic Models for Cyclic Behaviour
of Deteriorating Inelastic Structures. Technical Report MCEER-99-0018.
Multidisciplinary Center for Earthquake Engineering Research, Buffalo, NY.
Sivaselvan, M. V. and A. M. Renhorn. 2000. "Hysteretic Models for Deteriorating
Inelastic Structures." Journal of Engineering Mechanics 126(6):633-40.

Chapter 7 – References
312
Somerville, P., N. Smith, S. Punyamurthula, and J. Sun. 1997. Development of
Ground Motion Time Histories for Phase 2 of the FEMA/SAC Steel Project. Report
No. SAC-BD-97-04. SAC Joint Venture, Sacramento, CA.
Soong, T. T. and M. Grigoriu. 1993. Random Vibration of Mechanical and Structural
Systems. Prentice Hall. Englewood Cliffs, New Jersey.
Spanos, P. D. and L. D. Lutes. 1986. "A Primer of Random Vibration Techniques in
Structural Engineering." The Shock and Vibration Digest 21(11):3-14.
Stewart, A. H., A. Kliewer, J. R. Goodman, and E. M. Salsbury. 1988. "Full Scale
Tests of Manufactured Houses Under Simulated Wind Load." Pp. 2-97-111 in
Proceedings of the 1988 International Conference on Timber Engineering. Forest
Products Research Society, Madison, WI.
Stewart, W. G. 1987. "The Seismic Design of Plywood-Sheathed Shear Walls." PhD
Thesis, University of Canterbury, Christchurch, New Zealand.
Sugiyama, H., A. Naota, U. Takayuki, S. Hirano, and N. Nakamura. 1988. "Full Scale
Test on a Japanese Type of Two-Story Wooden Frame House Subjected to Lateral
Load." Pp. 2-55-61 in Proceedings of the 1998 International Conference on Timber
Engineering. Forest Products Research Society, Madison, WI.
Suzuki, S., E. Fujino, and M. Kawai. 1996. "Experimental Modal Analyses for Full
Scale Houses." Pp. 3-164-169 in Proceedings of the International Wood Engineering
Conference. New Orleans, LA. Ed. V. K. A. Gopu.
Tanaka, Y., Y. Ohasi, and I. Sakamoto. 1998. "Shaking Table Test of Full-Scale
Wood-Framed House." Pp. 2487-92 in Proceedings of the 10th Earthquake
Engineering Symposium. Yokohama, Japan.
Thyagarajan, R. S. 1990. "Modeling and Analysis of Hysteretic Structural
Behaviour." PhD Thesis, California Institute of Technology, Ann Arbor, MI.

Chapter 7 – References
313
Tuomi, R. L. and W. J. McCutcheon. 1974. "Testing of a Full-Scale House Under
Simulated Snow Loads and Wind Loads." Research Paper FPL234. USDA Forest
Products Laboratory, Madison, WI.
Wang, C.-H. and Wen Y-K. 2000. "Evaluation of Pre-Northridge Low-Rise Steel
Buildings. I - Modelling." Journal of Structural Engineering 126:1160-1168.
Watanabe, K., N. Kawai, N. Yamaguchi, and C. Minowa. 1998. "Seismic
Performance Testing and Prediction of Wood Construction." Pp. T222-3 in
Proceedings of Structural Engineers World Congress SEWC'98 (CD-Rom). Elselvier
Science, New York, NY.
Wen, Y.-K. 1976. "Method for Random Vibration of Hysteretic Systems." Journal of
the Engineering Mechanics Division, ASCE 102(EM2):249-63.
Wen, Y.-K. 1980. "Equivalent Linearization for Hysteretic Systems Under Random
Excitation." Journal of Applied Mechanics ASME 47:150-154.
Whale, L. R. J. 1988. "Deformation Characteristics of Nailed or Bolted Timber Joints
Subjected to Irregular Short or Medium Term Lateral Loading." PhD Thesis,
Polytechnic of the South Bank, CNAA, UK.
Wilson, E. L., I. Farhoomand, and K. J. Bathe. 1973. "Nonlinear Dynamic Analysis of
Complex Structures." Earthquake Engineering and Structural Dynamics 1(3):241-52.
Yamaguchi, N. and C. Minowa. 1998. "Dynamic Performance of Wooden Bearing
Walls by Shaking Table Test." Pp. 2-26-33 in Proceedings of the 5th World
Conference on Timber Engineering. Presses Polytechniques et Universitaires
Romandes, Lausanne, Switzerland.
Yang, C. Y. 1986. Random Vibration of Structures. John Wiley & Sons. New York.

Chapter 7 – References
314
Yasamura, N., T. Murota, I. Nishiyama, and N. Yamaguchi. 1988. "Experiments on a
Three-Storied Wooden Frame Building Subjected to Horizontal Load." Pp. 2-262-275
in Proceedings of the 1998 International Conference on Timber Engineering. Forest
Products Research Society, Madison, WI.
Yokel, F. Y., G. Hsi, and N. F. Somes. 1973. Full-Scale Test on a Two-Story House
Subjected to Lateral Load. U.S. National Bureau of Standards, Washington, DC.
Yoon, T.-Y. 1991. "Behaviour and Failure Modes of Low-Rise Wood-Framed
Buildings Subjected to Seismic and Wind Forces." PhD Thesis, North Carolina State
University, Raleigh, NC.
Zhang, H., P. J. Paevere, Y. Yang, G. C. Foliente, and F. Ma. 2001. "System
Identification of Hysteretic Structures." Pp. 289-306 in Nonlinearity and Stochastic
Structural Dynamics, IUTAM Symposium. Kluwer, Dordrecht.

Appendix A – Summary of Full-Scale Elastic Testing Results
315
APPENDIX A
Summary of Full-Scale Elastic
Testing Results
This Appendix contains summaries of the fifteen elastic tests described in Chapter 2.
Notes on Appendix A:
- Each test is portrayed through a series of plots and tables, on a separate page, and
is labelled in accordance with Table 2.4.
- The values of the applied loads, the displacements and the sum of the wall
reaction forces are given in the tables underneath the plots. All loads, reactions
and displacements are in-plane values.
- The loading points and directions are marked on the displaced shape plot. The
wall notation is shown on the first page and the direction conventions are shown
in Figure 2.3

Appendix A – Summary of Full-Scale Elastic Testing Results
316
Static Test: 1 Dead Load Test
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 0 0 sum 0 0 0 0 0 0 0 0
displ (mm) 0 0 0 0 0 - 0
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 Tot load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 1962 1328 1472 2519 1983 1458 2505 - sum 0 0 0 0 0 0 0 0min -1040 -673 -430 -3 -1 -98 0 -sum 2758 3829 6476 14055 6485 6370 10802 50775
Gravity Load Only
W1
W2
W3
W4
W5
W9
W8
W6
W7

Appendix A – Summary of Full-Scale Elastic Testing Results
317
Static Test: 2 load W1 to 0.3T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 2780 0 0 0 0 0 0 sum 610 1046 674 461 19 23 29 2861
displ (mm) -1.03 -0.28 -0.03 -0.06 -0.02 - 0.13
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 955 329 89 183 0 25 273 downforce sum 35 29 -7 -7 624 487 -1206 -45min -861 -174 -73 -159 -170 -266 -10 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
318
Static Test: 3 Load W2 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 4790 0 0 0 0 0 sum 333 2303 957 955 12 64 52 4676
displ (mm) -0.5 -0.59 -0.29 -0.11 -0.01 - 0.06
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 441 734 111 289 0 175 219 downforce sum 6 29 -28 -14 900 -15 -893 -15min -476 -520 -85 -249 -466 -194 -10 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
319
Static Test: 4 Load W3 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 4920 0 0 0 0 sum 53 305 3751 490 86 56 144 4886
displ (mm) -0.09 -0.08 -0.3 -0.06 -0.01 - 0.01
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 74 91 551 121 0 21 193 downforce sum 7 3 -21 1 80 -29 39 80min -73 -88 -375 -107 -170 -153 0 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
320
Static Test: 5 Load W4 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 4920 0 0 0 sum 67 438 1195 2995 16 73 51 4835
displ (mm) -0.11 -0.09 -0.16 -0.42 0.03 - -0.02
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 106 149 128 751 0 29 198 downforce sum 16 -6 4 -15 -610 -20 676 45min -75 -192 -110 -674 -420 -112 0 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
321
Static Test: 6 Load W8 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 5183 0 sum 52 78 -132 169 -2 -34 -13 117
displ (mm) -0.03 0.01 -0.02 -0.03 -0.05 - -0.07
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 303 138 117 71 127 1025 159 downforce sum 52 45 219 278 711 2496 1203 5004min 0 -176 -83 -623 -175 -342 -126 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
322
Static Test: 7 Load W8 to 0.5T, W2 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 -5070 0 0 0 5134 0 sum -312 -2313 -1287 -838 -34 -93 -81 -4957
displ (mm) 0.44 0.6 0.28 0.07 -0.04 - -0.13
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 608 667 163 89 626 1113 47 downforce sum 49 10 241 304 -268 2590 2107 5033min -246 -773 -156 -683 0 -372 -348 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
323
Static Test: 8 Load W5 to 0.5T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 5160 0 0 sum 90 468 72 -587 -8 -9 3 29
displ (mm) -0.08 -0.07 0 0.13 -0.26 - 0.01
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 158 369 63 71 353 142 57 downforce sum 21 61 137 50 2784 731 12 3795min -77 -41 -77 -408 -339 -106 -32 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
324
Static Test: 9 Load W5 to 0.5T, W4 to 0.8T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 -8040 5170 0 0 sum -39 -318 -1317 -5994 -12 -122 -55 -7857
displ (mm) 0.12 0.11 0.4 0.94 -0.37 - 0.04
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 187 845 237 1322 796 240 0 downforce sum -7 94 168 75 4801 819 -990 4961min -122 -209 -141 -1417 -149 -107 -417 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
325
Static Test: 10 Load W2 & W5 to -0.5T, 0.3T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 -5120 0 0 3184 0 0 sum -284 -2061 -1505 -1157 -50 -74 -58 -5189
displ (mm) 0.5 0.59 0.35 0.14 -0.23 - -0.07
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 538 1003 148 209 793 211 6 downforce sum 20 -7 66 62 1668 411 993 3212min -185 -747 -165 -339 -62 -202 -223 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
326
Static Test: 11 Load between W2 & W3 to 0.8T
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 0 0 sum 321 1922 2041 1597 207 89 109 6286
displ (mm) -0.43 -0.46 -0.07 -0.18 -0.16 - 0.05
btw W2 & W3applied load (N) 6795
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 435 628 208 444 84 172 266 downforce sum 15 12 -28 -18 369 125 -705 -229min -437 -524 -169 -342 -528 -163 0 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
327
Static Test: 12 Push W1, W2, W3, & W4 1.1mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 1096 5430 15000 6500 0 0 0 sum 803 4337 13951 7255 200 316 652 27515
displ (mm) -1.18 -1.17 -1.1 -1.11 0.03 - 0.07
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 1155 1382 2016 1808 0 269 955 downforce sum 62 44 -103 -41 726 42 -496 234min -1091 -1135 -1563 -1566 -1286 -618 0 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
328
Static Test: 13 Load roof ridge (5 deg. west)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 0 0 sum -228 -1260 -1137 -2102 -23 -71 -39 -4859
displ (mm) 0.41 0.36 0.3 0.3 0 - -0.01
roof ridge @ 5 deg. Westapplied load (N) -5088
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 370 393 133 557 398 174 0 downforce sum -6 -4 14 20 -37 137 68 193
min -249 -489 -146 -614 0 -123 -272 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
329
Static Test: 14 Load roof ridge (10deg. west)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 0 0 sum -204 -1058 -1738 -1839 -19 -69 -48 -4977
displ (mm) 0.32 0.26 0.19 0.25 -0.03 - -0.01
roof ridge @ 10 deg. Westapplied load (N) -5208
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 317 433 191 461 393 164 0 downforce sum -6 3 22 20 386 182 48 656min -246 -415 -202 -522 0 -102 -246 uplift

Appendix A – Summary of Full-Scale Elastic Testing Results
330
Static Test: 15 Load roof ridge (20 deg. east)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W8 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totapplied load (N) 0 0 0 0 0 0 0 sum -138 -670 -872 -695 -3 -31 -41 -2450
displ (mm) 0.17 0.14 0.1 0.08 0.04 - -0.01
roof ridge @ 20 deg. Eastapplied load (N) -2797
Z reactions Y Reactions
load (N) W1 W2 W3 W4 W5 W678 W9 load (N) W1 W2 W3 W4 W5 W678 W9 Totmax 188 63 91 263 260 61 0 downforce sum -9 -14 -5 -3 -643 -191 74 -792min -185 -220 -103 -210 0 -30 -112 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
331
APPENDIX B
Summary of Full-Scale Destructive
Testing Results
This Appendix contains snapshot summaries of the applied load, the displacement and
the reaction data from the static-cyclic destructive test described in Chapter 2.
Notes on Appendix B:
- Each snapshot is portrayed through a series of plots and tables, on a separate
page, and is taken at the peaks of selected loading cycles in both directions. Each
snapshot is labelled according to the load-cycle number, and the value of the
applied displacement.
- The values of the applied loads, the displacements and the sum of the wall
reaction forces are given in the tables underneath the graphs. All loads, reactions
and displacements are in-plane values.
- The loading points for the destructive test are indicated on the first two pages in
this appendix. The wall notation and the direction conventions are shown in
Figure 2.3

Appendix B – Summary of Full-Scale Destructive Testing Results
332
Destructive Test: 3 +2mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 11.38 9.17 0 0 20.55 sum 0.26 1.53 10.61 6.92 0.17 0.26 0.49 20.23
displ (mm) -0.33 -0.39 -0.79 -0.935 -0.13 0 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 0.41 0.56 1.35 1.78 0.00 0.12 0.65 downforce sum 0.06 0.00 -0.02 -0.02 -1.03 -0.18 1.11 -0.08min -0.35 -0.60 -1.09 -1.61 -1.01 -0.48 0.00 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
333
Destructive Test: 4 -2mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -7.47 -10.16 0 0 -17.63 sum -0.24 -1.57 -7.44 -7.46 -0.16 -0.32 -0.26 -17.44
displ (mm) 0.255 0.315 0.565 0.98 -0.09 -0.09 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 0.32 0.62 0.88 1.71 1.07 0.29 0.00 downforce sum -0.04 0.02 0.02 -0.01 1.24 0.20 -1.25 0.17min -0.35 -0.56 -1.30 -1.92 0.00 -0.12 -0.59 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
334
Destructive Test: 9 +5mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 24.2 21.59 0 0 45.79 sum 0.69 4.00 22.13 16.79 0.26 0.56 1.03 45.48
displ (mm) -1.095 -1.23 -2.72 -3.105 -0.3 0.17 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 1.11 1.52 3.10 4.44 0.00 0.37 1.50 downforce sum 0.14 -0.03 -0.09 -0.02 -2.67 -0.37 2.79 -0.26min -0.91 -1.60 -2.14 -4.28 -2.23 -0.87 0.00 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
335
Destructive Test: 10 -5mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -14.75 -19.11 0 0 -33.86 sum -0.53 -3.44 -13.05 -15.31 -0.45 -0.71 -0.52 -34.02
displ (mm) 1.055 1.165 2.34 3.09 0.13 -0.3 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 0.82 1.43 1.61 3.62 2.14 0.61 0.00 downforce sum -0.06 0.02 -0.07 0.15 2.22 0.29 -2.30 0.26min -0.62 -1.29 -2.25 -4.02 0.00 -0.33 -1.20 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
336
Destructive Test: 15 +10mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 38.69 35.61 0 0 74.30 sum 1.50 7.84 32.78 28.97 0.31 1.06 1.84 74.29
displ (mm) -2.745 -2.855 -6.51 -7.305 -0.81 0.68 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 2.47 3.00 5.18 7.92 0.00 0.68 2.60 downforce sum 0.36 0.01 0.01 -0.11 -4.96 -0.49 4.20 -0.97min -2.03 -3.16 -3.11 -7.16 -3.54 -1.15 -0.13 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
337
Destructive Test: 16 -10mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -34.06 -39.22 0 0 -73.28 sum -1.24 -7.49 -27.76 -31.14 -2.52 -1.73 -0.80 -72.69
displ (mm) 2.35 2.77 6.2 7.025 0.73 -0.47 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 1.90 3.07 2.97 7.24 4.16 1.52 0.00 downforce sum -0.01 0.14 -0.11 0.16 4.81 0.59 -5.43 0.16min -1.64 -2.72 -4.94 -8.16 -0.05 -0.84 -2.18 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
338
Destructive Test: 17 +15mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 47.08 46.07 0 0 93.15 sum 2.14 10.88 38.13 37.73 0.38 1.50 2.61 93.36
displ (mm) -4.43 -4.63 -11.54 -11.58 -1.41 1.11 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 3.62 4.16 6.32 11.14 0.00 1.02 3.36 downforce sum 0.43 -0.01 0.07 0.00 -6.81 -0.77 5.88 -1.22min -3.07 -4.38 -3.90 -9.36 -4.43 -1.54 -0.18 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
339
Destructive Test: 18 -15mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -41.78 -48.79 0 0 -90.57 sum -1.86 -10.28 -32.51 -39.08 -3.40 -2.06 -0.72 -89.92
displ (mm) 3.87 4.45 10.495 11.285 1.37 -0.77 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 2.87 4.05 3.87 10.69 5.23 1.98 0.00 downforce sum -0.06 0.16 -0.02 0.24 6.36 0.76 -7.12 0.32min -2.49 -3.67 -5.55 -10.89 -0.37 -1.25 -3.21 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
340
Destructive Test: 19 +20mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 49.32 51.8 0 0 101.12 sum 2.76 13.54 35.52 42.70 0.43 1.92 4.59 101.44
displ (mm) -6.33 -6.685 -16.25 -16.07 -2.01 1.5 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 4.72 5.06 6.44 13.55 0.00 1.32 4.03 downforce sum 0.49 -0.04 0.07 0.01 -8.23 -1.07 7.27 -1.49min -4.10 -5.44 -4.16 -9.24 -4.94 -1.88 -0.37 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
341
Destructive Test: 20 -20mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -45.13 -54.65 0 0 -99.78 sum -2.43 -12.76 -30.59 -43.77 -5.28 -3.75 -0.48 -99.05
displ (mm) 5.51 6.35 15.2 15.82 2.18 -1.11 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 3.74 4.96 4.21 13.56 5.93 2.39 0.00 downforce sum -0.10 0.20 0.00 0.20 7.60 1.05 -8.46 0.50min -3.23 -4.61 -6.01 -12.46 -0.64 -1.64 -4.07 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
342
Destructive Test: 25 +30mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 49.45 59.64 0 0 109.09 sum 3.96 17.61 29.72 48.93 0.71 2.23 6.24 109.41
displ (mm) -10.5 -11.27 -26.47 -25.74 -3.29 2.27 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 7.02 6.54 4.93 17.16 0.53 1.90 5.57 downforce sum 0.61 -0.03 -0.11 -0.12 -10.42 -1.49 9.66 -1.90min -5.68 -7.48 -3.59 -11.10 -6.30 -2.52 -0.96 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
343
Destructive Test: 26 -30mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -49.43 -60.71 0 0 -110.14 sum -3.40 -16.61 -28.38 -47.99 -6.92 -5.51 -0.71 -109.53
displ (mm) 8.895 10.4 25.245 25.2 3.97 -1.84 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 5.28 6.74 4.19 17.94 7.48 3.28 0.00 downforce sum -0.17 0.38 -0.01 0.14 9.54 1.76 -10.76 0.88min -4.53 -6.11 -5.54 -12.02 -1.23 -2.24 -5.06 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
344
Destructive Test: 31 +40mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 48.72 63.58 0 0 112.30 sum 4.98 20.20 26.63 51.29 0.85 2.46 6.39 112.79
displ (mm) -14.82 -16.1 -36.55 -35.49 -4.53 3.25 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 9.02 7.61 4.16 19.41 1.03 2.38 6.73 downforce sum 0.70 -0.02 -0.09 -0.35 -12.11 -1.68 11.33 -2.21min -7.04 -9.16 -3.52 -12.56 -7.03 -3.57 -1.23 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
345
Destructive Test: 32 -40mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -52.34 -62.71 0 0 -115.05 sum -4.21 -19.17 -27.32 -48.19 -8.57 -6.41 -0.73 -114.60
displ (mm) 12.38 14.72 33.93 34.625 5.98 -2.57 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 6.93 8.10 4.30 20.24 9.06 4.45 0.05 downforce sum -0.25 0.56 -0.17 0.10 10.88 2.44 -12.53 1.02min -5.72 -6.88 -5.50 -11.77 -1.86 -2.77 -5.93 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
346
Destructive Test: 37 +50mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 46.05 60.54 0 0 106.59 sum 5.53 21.21 22.37 47.61 0.82 2.56 6.56 106.65
displ (mm) -17.92 -19.67 -42.4 -41.9 -5.38 3.89 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 10.24 7.92 3.57 18.63 1.33 2.64 7.42 downforce sum 0.76 0.11 -0.02 -0.40 -12.80 -2.12 12.01 -2.46min -7.76 -8.84 -3.22 -13.02 -7.57 -4.24 -1.47 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
347
Destructive Test: 38 -50mm (1)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -51.29 -61.53 0 0 -112.82 sum -4.84 -20.88 -23.29 -46.41 -9.52 -6.47 -0.54 -111.94
displ (mm) 15.81 18.985 42.635 43.315 7.82 -3.16 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 8.36 8.87 3.89 20.78 10.21 5.38 0.40 downforce sum -0.28 0.64 -0.24 0.18 11.62 2.88 -13.78 1.02min -6.64 -7.35 -5.05 -11.29 -2.40 -3.16 -6.46 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
348
Destructive Test: 39 +50mm (2)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 41.75 56.89 0 0 98.64 sum 5.59 21.26 18.81 44.19 0.70 2.63 5.97 99.15
displ (mm) -19.91 -21.85 -47.05 -45.69 -5.85 4.28 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 10.79 7.97 2.91 18.68 1.70 2.70 7.45 downforce sum 0.78 0.11 -0.08 -0.32 -12.80 -2.30 12.22 -2.40min -7.33 -8.68 -2.65 -10.97 -7.63 -4.50 -1.67 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
349
Destructive Test: 40 -50mm (2)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -46.06 -57.87 0 0 -103.93 sum -4.87 -20.48 -21.01 -43.31 -8.35 -5.19 -0.42 -103.63
displ (mm) 16.7 20.11 45.3 45.24 8.25 -3.33 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 8.63 8.69 3.49 19.57 10.11 5.51 0.54 downforce sum -0.27 0.64 -0.23 0.17 11.29 2.98 -13.56 1.02min -6.73 -7.24 -4.49 -10.45 -2.59 -3.15 -6.05 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
350
Destructive Test: 41 +50mm (3)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 39.26 54.04 0 0 93.30 sum 5.48 20.67 17.32 41.83 0.67 2.56 5.38 93.91
displ (mm) -19.89 -21.87 -47.08 -45.73 -5.94 4.28 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 10.63 7.77 2.75 17.72 1.77 2.66 7.30 downforce sum 0.76 0.08 -0.01 -0.29 -12.47 -2.24 11.82 -2.35min -7.16 -8.40 -2.57 -10.27 -7.52 -4.47 -1.68 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
351
Destructive Test: 42 -50mm (3)
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -43.92 -55.46 0 0 -99.38 sum -4.82 -20.02 -19.96 -41.17 -7.89 -4.81 -0.37 -99.05
displ (mm) 16.8 20.275 45.545 45.485 8.33 -3.33 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 8.59 8.54 3.19 18.73 9.94 5.50 0.59 downforce sum -0.26 0.62 -0.24 0.19 10.97 3.05 -13.34 0.99min -6.69 -7.06 -4.18 -9.85 -2.61 -3.12 -5.97 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
352
Destructive Test: 43 +60mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 45.3 56.81 0 0 102.11 sum 6.29 23.83 19.16 42.70 0.79 2.77 7.10 102.64
displ (mm) -24.7 -27.25 -57 -55.66 -7.01 5.22 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 12.62 8.96 3.05 19.48 2.14 2.90 8.41 downforce sum 0.88 0.17 0.02 -0.49 -14.30 -2.56 13.61 -2.67min -8.04 -9.37 -2.98 -10.98 -8.25 -5.32 -2.14 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
353
Destructive Test: 44 -60mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -49.45 -57.34 0 0 -106.79 sum -5.51 -22.41 -21.48 -41.43 -10.62 -5.07 -0.35 -106.86
displ (mm) 20.94 25.185 54.405 55.27 10.21 -3.98 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 10.03 9.62 3.68 20.56 11.42 6.52 0.81 downforce sum -0.20 0.80 -0.23 0.07 12.15 3.61 -15.07 1.13min -7.67 -7.83 -4.39 -10.16 -3.17 -3.60 -6.67 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
354
Destructive Test: 47 +80mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 41.37 49.6 0 0 90.97 sum 6.74 26.20 17.56 34.55 0.74 2.67 3.14 91.59
displ (mm) -32.09 -36.2 -71.63 -69.96 -8.97 6.76 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 14.57 9.73 3.06 17.09 3.38 3.02 8.77 downforce sum 0.90 0.17 0.02 -0.42 -15.68 -2.94 15.10 -2.86min -7.44 -9.95 -2.82 -9.55 -9.05 -6.38 -2.89 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
355
Destructive Test: 48 -80mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -48.01 -54.49 0 0 -102.50 sum -6.16 -25.46 -18.50 -36.92 -11.12 -4.15 -0.22 -102.52
displ (mm) 30.44 35.235 73.82 74.8 13.98 -5.17 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 11.57 10.93 4.36 19.61 13.36 7.08 1.69 downforce sum 0.08 1.01 -0.09 0.04 13.17 4.45 -17.19 1.47min -7.95 -8.47 -3.89 -8.12 -4.25 -4.61 -7.34 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
356
Destructive Test: 49 +100mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 41.46 46.22 0 0 87.68 sum 7.35 28.65 15.87 29.89 0.75 2.70 3.28 88.49
displ (mm) -41.18 -45.9 -89.11 -87.21 -11.28 8.64 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 16.54 10.44 2.99 14.92 4.47 2.30 9.36 downforce sum 0.98 0.07 -0.05 -0.34 -17.07 -3.15 16.38 -3.18min -7.98 -8.89 -2.92 -8.24 -9.97 -5.61 -3.52 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
357
Destructive Test: 50 -100mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -44.59 -48.43 0 0 -93.02 sum -6.23 -25.76 -16.13 -30.82 -9.30 -4.45 -0.46 -93.15
displ (mm) 34.81 40.28 82.475 83.47 15.51 -5.77 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 11.70 11.16 2.54 15.40 13.53 6.62 2.31 downforce sum 0.04 1.11 0.01 0.16 13.07 4.89 -17.53 1.75min -7.95 -8.39 -3.13 -6.74 -4.25 -4.35 -7.69 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
358
Destructive Test: 51 +120mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 40.96 39.57 0 0 80.53 sum 7.90 30.26 13.86 21.47 0.87 2.61 4.23 81.20
displ (mm) -56.43 -62.15 -115 -113.1 -15 11.46 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 16.46 10.18 2.34 13.42 6.06 2.66 9.26 downforce sum 0.97 0.02 -0.39 -0.49 -18.24 -2.76 17.46 -3.44min -6.86 -8.40 -2.58 -6.66 -10.73 -6.68 -3.89 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
359
Destructive Test: 52 -120mm
Top plate displaced shape (plan) X Reactions
W1 W2 W3 W4 W5 W9 Tot load (kN) W1 W2 W3 W4 W5 W678 W9 Totapplied load (kN) 0 0 -42.12 -36.17 0 0 -78.29 sum -6.85 -27.41 -15.26 -18.14 -6.13 -4.97 0.05 -78.70
displ (mm) 48.75 56.555 107.49 109.26 19.74 -7.78 -
Z reactions Y Reactions
load (kN) W1 W2 W3 W4 W5 W678 W9 load (kN) W1 W2 W3 W4 W5 W678 W9 Totmax 12.42 11.96 1.72 4.78 14.81 6.61 3.11 downforce sum 0.00 1.38 -0.24 0.16 13.89 5.20 -18.04 2.34min -7.36 -8.42 -3.31 -6.03 -4.59 -4.76 -8.27 uplift

Appendix B – Summary of Full-Scale Destructive Testing Results
360

Appendix C – Generalised Reduced Gradient Algorithm
361
APPENDIX C
Generalised Reduced Gradient
Algorithm
This appendix contains a brief summary of the GRG algorithm, reproduced from
Lasdon et al. (1978). Notation in this Appendix is self-contained. The basic GRG
algorithm is to solve nonlinear programs of the form
minimize ( )1mg X+
subject to ( ) 0ig X = , i = 1, neq
( ) ( )0 ig X ub n i≤ ≤ + , i = neq+1,m
( )( ) ilb i X ub i≤ ≤ , i = 1, n
(C1)
where X is a vector of n variables. The number of equality constraints, neq, may be
zero. The functions gi are assumed differentiable. The problem must be formulated in
the form of Eq. (C1). It is then converted to the following equality form by adding m
slack variables Xn+1 … Xn+m
minimize ( )1mg X+
subject to ( ) 0i n ig X X +− = , i = 1, m
( )( ) ilb i X ub i≤ ≤ , i = 1, n+m
( )( ) 0lb i ub i= = , i = n+1, n+neq ( ) 0lb i = , i = n+neq+1, n+m
(C2)
These last two equations are the bounds for the slack variables. The variables X1,…Xn
are called natural variables.
Let X satisfy the constraints of Eq. (C2), and assume that nb of the gi constraints are
binding (i.e. hold as equalities) at X . A constraint gi is taken as binding if

Appendix C – Generalised Reduced Gradient Algorithm
362
( ) ( )i ig ub n i or g lb n iε ε− + < − + < (C3) i.e. if it is within ε of one of its bounds.
GRG uses the nb binding constraint equations to solve for nb of the natural variables,
called the basic variables, in terms of the remaining (n – nb) natural variables and the
nb slacks associated with the binding constraints. These n variables are called
nonbasic. Let y be the vector of nb basic variables and x the vector of n nonbasic
variables, with their values corresponding to X denoted by ( , )y x .
Then the binding constraints can be written
g(y, x) = 0 (C4) where g is the vector of nb binding constraint functions. The basic variables must be
selected so that the nb x nb basis matrix i iB g y= ∂ ∂ is nonsingular at X . Then the
binding constraints (Eq. C4) may be solved for y in terms of x, yielding a function
y(x) valid for all ( , )y x sufficiently near ( , )y x .
This reduces the objective to a function of x only
( )1 ( ), ( )mg y x x F x+ = (C5) and reduces the original problem (at least in the neighborhood of ( , )y x ) to a simpler
reduced problem
minimize ( )F x subject to l x u≤ ≤
(C6)
where l and u are the bound vectors for x. The function ( )F x is called the reduced
objective and its gradient, ( )F x∇ , the reduced gradient. The series of reduced
problems are then solved by a gradient method.

Appendix D – Equivalent Linearisation Coefficients
363
APPENDIX D
Equivalent Linearisation
Coefficients
This appendix contains the equations for the linearisation coefficients used in Chapter
4, as presented in Foliente (1993).
The Linearisation coefficients 3eC and 3eK are given by:
( ) ( )1 13 1 2 3 4 5
1eC C C C C Cξ ξ νν
η η η η
µ µ µµ β γ β γµ µ µ µ
= − + − + + (D1)
( ) ( )
( ) ( )
( )
1
2
1 1
2 2
1
3 1 2 3 42
5 6 7 82 2
9 10
2
2 2
e u
u
K K K K qz K
qz K K K K
n K K
ξν
η η ξ
ξ ν ξ ν
η ξ η ξ
ξ ν
η
µµ β γµ µ µ
µ µ µ µβ γ β γ
µ µ µ µµ µ
β γµ
= − + + −
+ + − +
+ +
(D2)
where:
C n In nsn1
23
1 2 22
=+FHGIKJp
s( ) /G (D3)
C nn n2
23
1 2 12
=+FHGIKJp
s( ) /G (D4)
C e erfc3
32 2
32
2
1
2 2=
+
-FHGIKJ
-m
s m
z
z
D D (D5)
C e I n I nGL GL43
12
1 11= - -
-
ps
D [ ( , ) ( , )] (D6)
C e I n I nGL GL53
12
1 11= + -
-
ps
D [ ( , ) ( , )] (D7)

Appendix D – Equivalent Linearisation Coefficients
364
K n nn
In n nsn1
22 3
1232 1 2
232 22
2 1=+FHGIKJ - +LNM
OQP
- +
ps s r r
/ ( )/( )G (D8)
K n nn n2
223 2 3
12 12
=+FHGIKJ
-
pr s s
/G (D9)
K e erfc e3
32 2
2
323 1
212 3
1 222
2
1 32
2 22
=
+
+-FHGIKJ +
LNM
OQP
- -m
s m
s
sr m s
pm
z
z
D DDD( )* * *
/ (D10)
K e erfc e4
32 2
2
323 1
212 3
222
2
1 32
2 22
=
+
+-FHGIKJ +
LNM
OQP
- -m
s m
s
sr m s
p
z
z
D DDD( )* *
/ (D11)
K e I n I n I n I nsum sum GL GL52
3232 23
3
1 1 1 12
1 1 1 11= - - - + + - - +
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D12)
K e I n I n I n I nsum sum GL GL62
3232 23
3
1 1 1 12
1 1 1 11= - + - + + - - +
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D13)
K e I n I n I n I nsum sum GL GL72
3232 23
3
1 1 1 1 1 12
1 2 1 21= - + + - + + + - - +
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D14)
K e I n I n I n I nsum sum GL GL82
3232 23
3
1 1 1 1 1 12
1 2 1 21= - + - - + + + + - +
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D15)
K e I n I n I n I nsum sum GL GL92
3232 23
3
1 1 1 1 1 12
1 11= - - + - - + - -
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D16)
K e I n I n I n I nsum sum GL GL102
3232 23
3
1 1 1 1 1 12
1 11= - - - - - + + -
RSTUVW
-
p
s
sr
p r
s
D [ ( , ) ( , )] [ ( , ) ( , )] (D17)
I dsnn
= z2 23
2
0
sgn( ) sin/
r q qq
p
(D18)
qr
r0
1 232
23
1=
-FHG
IKJ
-tan (D19)
I f m y f y f erf y y e dyGL ii
im y( , ) exp *
*
= --F
HGIKJ +
LNMM
OQPP +
-
FHG
IKJ
LNMM
OQPP
•
-z 12
12 1
3 1
1
2
30
23 3
3 232 3 3
3m
s
r
s r
(D20)
I f m emk
f k ksum i
k
mm k k k( , ) ( ) ( ) ,*
/* *
( )/sgn
*
*
=FHGIKJ
+FHG
IKJ -
+FHGIKJ
LNM
OQP
-
=
- -
Âs m s gm
s2
2
02 2
1 2 22
22
32
2 12 2
12
DG (D21)
fif fif f
k
m ki
isgn
( )( )
=
-
-
=
= -
RST - -
11
111 (D22)
D1
2 2
32 22
2
=+
q zu
s mz
(D23)
D2 32
232
232
121= - +s r r s( ) * (D24)

Appendix D – Equivalent Linearisation Coefficients
365
DD
323 1
2
=r m * (D25)
ms
s mz
132
32 2
22
2
* =+
qzu (D26)
sm s
s m
z
z
13
32 2
2
22
* =
+
(D27)
mm s r
21 3
2232
2
1*
* ( )=
-
D (D28)
ss s r
21 3 23
2
2
1*
*=
-
D (D29)

Appendix D – Equivalent Linearisation Coefficients
366

Appendix E – Publications Arising From Research
367
APPENDIX E
Publications Arising From
Research
The following three refereed publications, included in this appendix, were produced
throughout the course of this research:
• Paevere, P. J., G. C. Foliente, and N. H. Haritos. 1998. "On Finding an
Optimum MDOF Inelastic System Model for Dynamic Reliability Analysis."
Pp. 215-222 in Proceedings of the Australasian Conference on Structural
Optimisation. Sydney, Australia, February 11-13. Ed. G. P. Steven, O. M.
Querin, H. Guan, and Xie Y. M. Oxbridge Press, Victoria, Australia.
• Paevere, P. J., N. H. Haritos, and G. C. Foliente. 1998. "A Hysteretic MDOF
Model for Dynamic Analysis of Offshore Towers." Pp. 513-17 in Proceedings
of the Eighth International Offshore and Polar Engineering Conference.
Montreal, Canada, May 24-29.
• Paevere, P. J. and G. C. Foliente. 1999. "Hysteretic Pinching and Degradation
Effects on Dynamic Response and Reliability." Pp. 771-79 in Proceedings of
the Eighth International Conference on the Application of Statistics and
Probability. Sydney, 12-15 December. Ed. R. E. Melchers and M. G. Stewart.
A.A. Dalkema, Rotterdam.

Appendix E – Publications Arising From Research
368

Appendix E – Publications Arising From Research
369

Appendix E – Publications Arising From Research
370

Appendix E – Publications Arising From Research
371

Appendix E – Publications Arising From Research
372

Appendix E – Publications Arising From Research
373

Appendix E – Publications Arising From Research
374

Appendix E – Publications Arising From Research
375

Appendix E – Publications Arising From Research
376

Appendix E – Publications Arising From Research
377

Appendix E – Publications Arising From Research
378

Appendix E – Publications Arising From Research
379

Appendix E – Publications Arising From Research
380

Appendix E – Publications Arising From Research
381

Appendix E – Publications Arising From Research
382

Appendix E – Publications Arising From Research
383

Appendix E – Publications Arising From Research
384

Appendix E – Publications Arising From Research
385

Appendix E – Publications Arising From Research
386

Appendix E – Publications Arising From Research
387

Appendix E – Publications Arising From Research
388

Appendix E – Publications Arising From Research
389

Appendix E – Publications Arising From Research
390

Appendix E – Publications Arising From Research
391






![[Aviation] Modelling Manuals 01 - Basic Aviation Modeling [Osprey Modelling Manuals] [scale model.pdf](https://img.pdfslide.us/doc/110x75/563db9b8550346aa9a9f47bb/aviation-modelling-manuals-01-basic-aviation-modeling-osprey-modelling.jpg)