Embed Size (px)
Citation preview

Frequency Response Measurements for Switching Power Supplies
Dr. Ray RidleyRidley Engineering, Inc.
ABSTRACT
Frequency response papers typically focus theoretical and mathematical aspects of modeling. Rarelymentioned is the essential need to make measurements of the resulting system to ensure stability. Inthe real world of design and product development, measurement of frequency response is far moreimportant than theoretical modeling. When designing a product for modern quality standards, carefulmeasurement of control loop stability is required to minimize risk.
One way to think of it is this -measuring thestability of the power supply control is asimportant as using your oscilloscope to measurepeak voltages and currents on criticalsemiconductors. No experienced designer woulddepend upon the results of simulation to fullypredict critical circuit waveforms. The samephilosophy should apply to control loop stability.
I. INTRODUCTION
Most papers on frequency response concentrateon theory and modeling. This has the unfortunateresult of leading engineers to think that modelingis the most important step in designing a controlloop, and that the hardware will work reliably aspredicted if the modeling is done.
The reality is that modeling is a useful and validstep, but it is also vitally necessary to measurecontrol loop stability with a frequency responseanalyzer. Why? There are several reasons:
II. CIRCUIT MODELING
Modeling of power converter circuits started inearnest in the late 1960s at Caltech [I]. Why?Because observations on the hardware showedphenomena that were unexpected, and whichcaused hardware failure. This led to thedevelopment of the theory of state-spaceaveraging, which quickly became the standardway to analyze power conversion circuits.
1 Modeling has limitations in predictinghardware response -the models are often
wrong!
Measurements almost always differ from
predictions.
2.
In the 1980s, simpler methods replaced state-space averaging in the form of the PWM switchmodel [2]. Different versions were created for theproliferation of new circuits and technologies thatcame along in the 1980s and 1990s [3], (PWM,resonant, soft-switched, quasi-resonant, etc.).
3. Risk is high in shipping a product withoutloop stability measurements.
It's not that the theory of modeling is necessarilyincorrect. But component values are ofteninaccurate and incomplete. PCB layout,temperature effects, and component parasitics,which appear minor, can have a major impact oncontrol loop stability.
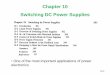
The PWM switch model works better than state-space averaging and is much easier to apply. Fig.1 shows a typical equivalent circuit that resultsfrom this kind of analysis. This circuit diagramcan be used with a circuit analysis package suchas PSpice to generate the transfer functions thatcan be measured on the ideal equivalent PWMconverter circuit, in this case a flyback converter.
Al-l

Examples of circuit operation that can cause themodel to fail are:
I. Discontinuous conduction mode operation(and associated ringing waveforms afterdiode shuts off).
2. Snubber operation, especially losslesssnubbers.
Figure 1. PWM switch model in jlyback circuit.Simple linear circuits replace the switching
action of the real circuit.
3. Light load operation, especially for current-mode control.
4. High-ripple circuits such as flybackconverters.These models have their strengths and uses, and
help designers in their work. And, in almost all ofthe papers that derive models, measurements areused to confirm the validity of the work [1-4].This leads naturally to a conclusion for thereader- modeling is accurate and sufficient.
5. Control system noise and ripple.
6. Propagation delays.
7. Semiconductor nonlinearities -diode offsets,
junction drops, etc.What the modeling papers don't tell you is theamount of effort that goes into the test circuits tomake sure that measurements and predictionsagree closely. For example, the converter isalways operated in the center of its range, andnoise is completely eliminated from the system.This often requires converter grounding setupsand instrumentation that may be completelyunrealistic in practical production powersupplies. When you measure a real productionsupply, it is often extremely difficult to get it toconform closely to the published theory.
8. Multiple output converters.
9. High and low temperature operation.
If you look through this list, and your circuit hasnone of these issues, the models can be veryaccurate, assuming you meet the second criteriaof using the correct component parasitics.Unfortunately, almost every real converter builtfor production has -at least one of thesecharacteristics. Which gets back to the main pointof this paper -measure your power supplycontrol loop stability!
III. MODEL BREAKDOWN
There are two main reasons why modelingfrequently fails for a circuit: IV. FREQUENCY RESPONSE
ANALYZER FUNCTIONSI. The model is not detailed enough to account
for the circuit operation. So what is required to measure the control loopof a power system? Basically you need anoscillator to inject into the circuit, and two testchannels to measure the response. There areseveral functions needed to do the job properly:
2. The circuit elements of the model are not
accurately known or modeled.
Al-2

A. A sinusoidal oscillator output signal ofadjustable size that is swept over severaldecades automatically.
B. An accurate measurement algorithm thatcompares the signals for gain and phaseinformation -accurate to O.ldB for gain, and2 degrees for phase. 10 100 1 k 10k
Frequency (Hz)
100 k
Figure 2. Typical loop gain showing high gain atlow frequency, and 5kHz crossover frequency.
c. A narrowband noise measurement systemthat will reject all the switching, line.frequency, and other noise in the test signals.
At the low frequency end of a power supply loopmeasurement, the gain of the system will be veryhigh- in excess of 6OdB, and sometimes as highas 8OdB. Consider the size of the signals neededto make this measurement. You must ensure thatyou are measuring "small-signal" with a small acperturbation on top of the dc operating point. Forthis, the output signal will typically be IOOmY orless.
D. Dynamic range of at least 80dB toaccommodate the range ofsignal sizes andgains that will be encountered.
A. Swept-Sine Output
A switching converter needs to be measured from
low frequencies of interest up to high enoughfrequencies to show the major system dynamics.
The input signal to the loop, for a IOOmY output,will be O.lmY for a gain of6OdB, and IOI.1Y for again of 8OdB. It is common, however, to have upto a few hundred mY of noise in the signals. It isimpossible to measure the test signal in so muchnoise without a specialized instrument. That isthe second main function of the frequencyresponse analyzer -to extract the test frequencyonly, with a very narrow bandwidth, so systemnoise does not interfere with the measurements.
This is typically below SO Hz at the low end, (lessthan this for motor control circuits and PFCcircuits) up to the switching frequency. (Half theswitching frequency is theoretically more thansufficient, but there are often practical benefits inseeing the higher frequency data. )
A typical switching power supply operating atlOOkHz will be measured from lOHz to IOOkHz,and will have a crossover frequency of 2kHz -
lOkHz. Across this range, you want a piece ofequipment that can output a test sine wave, andautomatically step it in logarithmic increments.For each test frequency, the instrument needs tomeasure two signals at the test frequency, andcompare their magnitudes and phase.
lOOmV/div
B. Noise rejectionFigure 3. Typical test signal to be measured, with
switching spikes and other noise. Less than0.1 m V test signal must be accurately measured in
the presence of over 200m V noise.
Fig. 2 shows a typical power supply loop gainmeasured with a frequency response analyzer.
Al-3

This is shown in Fig. 4. The only complicationwith this technique is that the signal injected intothe circuit must be injected differentially acrossthe resistor, not with respect to ground. This istypically done with a signal injectiontransformer. The output signal from the networkanalyzer is coupled through an isolationtransformer.
A Frequency Response Analyzer, also referredto as a Network Analyzer, is specificallydesigned to provide these functions. Untilrecently, it was necessary to spend $30k or moreto get an instrument suitable for the task ofmeasuring switching power supplies and theircomponents. Today, this type of instrument canbe purchased for under $lOk, making it bothaffordable and indispensable for all power
engineering companies [5].
v. LOOP GAIN MEASUREMENTS
Power supplies are extremely high dc-gainsystems. They use integrators to maximize the dcgain, and ensure that the output voltage dcregulation is tight. The power supply and controlcircuits cannot, therefore, be run with the loopopen. It's simply not possible to hold the dcoperating point steady with an open loop system.
Fortunately, there are established anddocumented techniques for measuring the openloop gain of a system while the loop is keptphysically closed. The only invasion into thecircuit is through the insertion of a test resistor.The technique is very accurate as it does indeedmeasure the true open loop gain of the system,not a gain modified by the injection techniqueitself.
InjectedSignal
\A;V\
f 20ohm ~
U
/\Af\J\
LoopInput
/\j\!\/\
Injected
Signal
~1~1\~I~I~/1~i~i~i\~I~i~i
I 20ohm ~
U
HighFrequencyLow Gain
Loop
OutputLoopInput
Figure 5. Signal distributions at dijJerent loopgains- high gain, crossover, and low gain. The
injected signal size stays constant across thewhole frequency range, and gets distributed
between the input and output of the loop,depending on the loop gain.
Figure 4. Feedback loop system showing.frequency response analyzer connection and
injection resistor.
Al-4
Crossover
FrequencyUnity Gain
Loop
Output

It's a little unusual how this works- the signalsize across the resistor is constant. The vectorsum of the injected signal and return signal areexactly equal to this injected signal. The powersupply feedback system will adjust the signalsizes according to the gain needed. For example,if the gain of the system is 60dB, and the injectedsignal is lOOm V, almost the entire injected signalappears across the output and only O.lmV acrossthe input.
VI. CASE STUDY NO.1
A printer power supply company was ready torelease a design to manufacturing. A substantialamount of modeling and prediction ensuredsystem stability. The power supply wasconsidered ready for production with quantitiesexceeding 10,000 units per month.
The company had a frequency response analyzerin house, ready for evaluation. But, like most ofus, the engineer was too wrapped up in theproduction details to take loop gainmeasurements.
At the crossover frequency, the injected signal isdistributed equally between input and outputsignals. And, when the gain of the system is verylow, beyond the crossover frequency, most of thesignal is applied to the loop input, and only asmall fraction to the loop output.
Finally he was persuaded to do a quick test withthe analyzer on this latest product. Reluctantly,he did, taking a couple of hours out of hisschedule.An animated example of this process can be seen
at the Ridley Engineering web site [5], showinggraphically how the injected signal is dividedbetween loop input and output.
Gain (dB)
60
0
-20
40100
In order not to disturb the operating point of thesystem, the injection resistor is kept smallrelative to other components in the circuit.Typically, a 20Q or 50Q resistor is used in serieswith several kQ already in the circuit. 1 k 10k
Frequency (Hz)
100k
During measurement, it is usually advisable tomonitor critical waveforms of the control systemto make sure that they remain in the small-signalregion. An oscilloscope probe on the output ofthe error amplifier, and output of the powersupply is usually sufficient. As the gain of theloop changes, it is customary to adjust the size ofthe signal injection to keep the signals largeenough to be measured, but small enough keepthe system linear.
-
~Icted Loop Phase
~cl
/
~ Measured Loop Phase
100 10kFrequency (Hz)
100k
Figure 6. Predicted and measured power supplyloop gains using manufacturer's data for
capacitor esr. Over 50 degrees phase error!Other concerns and techniques for measuringloop gains properly are given in [5].
To his amazement, the power supply was almostunstable, with only 35 degrees of phase margin atthe selected nominal operating point -50 degreeslower than expected. The production release wasdelayed for a day to figure out the problem, andfix it quickly.
Al-5

The model the engineer was using was fine, andthat all the values corresponded to themanufacturer's data for the passive components.And that's where the problem lay- the wrongvalue of ESR for the output capacitor was beingused. It was correct according to the data sheets,which called out a maximum value of 7.5.0. for atantalum capacitor. The real value of the ESRwas only 0.25.0.- a factor of 30 lower than thepublished maximum! This corresponded to achange in gain of 30dB at higher frequency. And,since we often cross a control loop over in theregion where the output capacitors are resistive,the whole loop gain was depending on this value.
VII. CASE STUDY NO.2
Researchers in the academic community whospend all their time on theory and modeling oftenadvise engineers that they should be veryconcerned about stability. The fact is that mostdesigners have so many other issues on theirplate during development, this is just one moreitem on the list, and it's frequently overlooked
It's often inconvenient to stop and think aboutcontrol systems. When deeply involved in thedevelopment of power supplies- including all thedetails of design, layout, parts selection, testing,etc. it's easy to neglect control. At the end of theproject, when final testing is almost complete, weall find it tempting to assume the fact theconverter works assures us that everything is OKin the loop without needing to measure itdirectly. Even the most experienced of us makewrong assumptions, and forget the importance ofthis step.
Gain (dB)60
1401 :-:-Measured Loop
201 : Gain
Predicted Loop -Gain
1 k 10 k 100 k
Frequency (Hz)
:L100
This example is of an off-line tlyback converterwith dual outputs. The simplified schematic isshown in Fig. 8. One of the outputs is used topower an electronic load, and has a large amountof storage capacitance. This output is isolatedfrom the mains input. The second output isreferenced to the primary side, and used to powerthe control IC. This second output is also used forfeedback regulation, since it does not needisolation in the feedback path.
100 10k
Frequency (Hz)100k
Figure. 7. Same measured loop gain as Fig. 6,but predicted loop gain using measured values of
capacitor esr (30 times lower!). Like the previous example, the power supply wasbuilt, tested, and ready for prototypemanufacturing. And, like many engineers, it wasassumed that a simple DCM flyback circuit likethis would behave as predicted by small-signalcircuit models.
A refinement to the model values confirmed themeasured loop gain, and the need to add a coupleof additional compensation components to theboard.
Cost to the program was only a few hoursengineering time, and the changes wereincorporated in the final production board run thenext day. The savings in potential product recalland re-engineering were substantial.
Al-6

The small-signal model initially used for thedesign is shown in Fig. 9. This makes theassumption that the outputs of the converter trackeach other well, and all the output capacitancescan be reflected to a single output. The convertermodel then reduces to just a single-outputflyback (i.e. the model format that appears inalmost all theoretical papers- there is littlepublished on how to handle multiple outputs
properly.)
SOT
Figure 9. Small-signal circuit model. (Simplestassumption -the two outputs track each other
according to the turns ratios).
100k10 100 1 kFrequency (Hz)
10k
Phase (deg)
-40
-80
Predicted Power Stage.120
.160Figure 8. Simplified schematic of flyback powersupply with auxiliary regulation. Main output hasa large storage capacitance. Auxiliary output isused for feedback regulation, and to power thecontroller. The 20.Q resistor in between points
( 1) and (2) is used for experimental s ignal
injection.
10 100 1 kFrequency (Hz)
10k 100k
Figure 10. Measured and predicted loop gains.
Figure 10. shows an extreme when things goawry. The gain is dramatically off in the criticalcrossover frequency region, and the two phase
curves have almost no resemblance to eachother!
Al-7

This is a more subtle problem than simply usingthe wrong component values. First, a morecomplex model is needed to predict the multipleoutput converter response. Fig. II shows theequivalent circuit model that separates the outputcapacitors, and allows for winding resistances ofthe individual outputs.
-80100 1 k
Frequency (Hz)100k
-:: !Measured Power!
Stage i
jc
jPredicted Power Stage I
Inserting the winding resistances still produceslarge errors. The gain is much too high inmeasurement versus prediction. More detailedanalysis shows the problem to be the equivalentseries resistance of the diode! This is a parasiticthat is often overlooked in modeling. Very few ofthe papers on modeling highlight the diode esr asbeing an issue- it's always assumed to be verylow, and therefore somewhat irrelevant.
Phase (dog)a
-40
-1
-160
100 1 k
Frequency (Hz)100k
Figure 12. Loop gain measurement andpredictions with proper diode esr value in the
model.
For both of these design examples, furtherdeviations from predicted results can be expectedas the power supplies are operated at the comersof the electrical specifications, and at temperatureextremes. You should always measure yoursystems across the full range of operation tominimize risk of subsequent problems andfailure.
VIII. COMPONENTMEASUREMENTS
Both case studies uncovered an important aspectof switching power supply design. Parasitics ofcomponents in a power converter can havedramatic effects on the overall system operation,especially on stability. It is, therefore, crucial tounderstand which elements are important in thedesign (that's part of the role of good modeling)and to know how to get their values.
Figure 11. Two-output flyback converter withmore accurate modeling of output circuits. Diode
esr, included in Rs2, is the critical parasiticcausing errors.
What's different here? The second diode, on theauxiliary output, is used at very low current. And,as semiconductor experts are well aware, theincremental series resistance of a diode at lowcurrents is very high- in this case, about 1.Q.. Thisresistance is high enough to decouple the largestorage capacitor on the main output from thefeedback output, substantially increasing theconverter gain.
Many manufacturers of power components donot give adequate data for their parts for properconverter design. For example, capacitormanufacturers may specify an esr at 120Hz, arelic of the days when all power was processed atline frequency. The esr at 100kHz will typicallybe substantially different and often lower. It is upto the design engineer to determine which valueto use in modeling and control design.
Al-8

Similarly, the parasitics of magnetics parts arecritical to good design. Changing leakageinductance, for example, can make or break(literally!) a power supply design. Prototypes andmanufacturing units of transformers must beproperly characterized, specified, and controlledin volume production to ensure system reliability.
It is not necessary to have sophisticated setupsfor measuring impedance to the degree ofaccuracy needed for power components. Somevery simple circuits can provide a wide dynamicrange of measurement, as shown in Fig. 13.Careful selection of test circuits allows themeasurement of high impedances up to 100k.Q.,and of capacitors as small as 1 pF. This allowscharacterization of almost any power transformerat its resonant frequency.
If you have a frequency response analyzer onyour bench for loop gain measurements, you alsohave a very powerful tool for characterizing theimpedances of components, and finding thecritical parasitic values.
At the low impedance range, 4-terminal Kelvinmeasurements allow a frequency responseanalyzer to effectively measure down to lm.Qand 4nH of lead inductance. Impedances belowthis range require expensive calibrated setupsused on high-end RLC meters to measureanything other than dc resistance. (DC resistancecan also easily be measured in the Jl.Q range withvery simple lab instrumentation- an accuratevoltmeter and current source.)
A frequency response analyzer is designed tomeasure transfer functions of a circuit, in thepresence of substantial noise. However, it canalso be used as a very effective engineering toolfor impedance characterization of components.This is a very important function of such aninstrument, since a dedicated RLC meter, capableof operating over the range of interest of powerconversion components, can be very costly. IX. TRANSFORMER IMPEDANCE
MEASUREMENTSWhile a frequency response analyzer does nothave the same resolution capabilities of a trueRLC meter, its ability to measure impedancecontinuously over a wide frequency range makesit very applicable to power components.Parasitics of magnetics, capacitors, and othercomponents are often a function of frequency.Most RLC meters do not provide this continuousdata. And it can be very misleading if thecomponent manufacturers do not have the propertest frequency for measurements.
One powerful use of a frequency responseanalyzer is the measurement of impedances oftransformers and inductors. Extended impedanceversus frequency plots provide significant designand performance data.
As in classicalline-frequency transformer design,the proper way to characterize a powertransformer for high-frequency applications iswith priamry-side impedance measurements withthe secondaries (i) open-circuited and (ii) short-circuited. This provides a wealth of designinformation, and should be measured andarchived for every design that is done, and foreach step of the transfer of the design into
manufacturing.
Figure 13. Range of impedance measurementsfor the frequency response analyzer using simple
measurement setup circuits.
Al-9

The leakage inductance impedance is onlydominant in the short circuit measurements from50kHz to 3MHz, and it should be measured inthis range by the manufacturer. Specifying andmeasuring the leakage at lkHz will lead tounacceptable accuracy, and poor qualitycontrol.
In some designs, it will become apparent that theleakage inductance asymptote is not a straight20dB/decade slope. Instead, the leakage willdecrease with frequency, due to proximity effectsin the windings. If this effect is pronounced, greatcare must be taken in choosing the test frequencyto avoid errors.
10 100 1 k 10 k 100 k
Frequency (Hz)
1M 10M
Figure J 4. Transformer impedancemeasurements. Open circuit and short circuit
measurements provide a wealth of design
information.Fig. 15 shows an example of open-circuitimpedance measurements on a production powersupply. Curve number 2 is the impedance of atransformer built in the engineering lab. Curvenumber 1 was a pre-production prototype. Theopen circuit resonance of the engineering partwas at 550kHz, and of the pre-productionprototype, 340kHz. Both frequencies were highenough not to cause initial concern, with aswitching frequency of 70kHz. The engineeringprototype worked, however, and themanufacturing part did not. The power supplyfailed to start.
Fig. 14 shows some example plots of powertransformer impedance, measured from theprimary, with the secondaries first open, thenshort-circuited. Several asymptotes on the curvesof Fig. 14 are numbered, corresponding to theregions used for measurement of criticaltransformer parameters:
1. Primary winding resistance
2. Primary + reflected secondary winding
resistance
3. Magnetizing inductance
4. Leakage inductance
5. Open-circuit resonance
(and equivalent winding capacitance)
6. Short circuit resonance
(and its' equivalent capacitance)
Don't underestimate the value to the design andmanufacturing process of measuring these curvesearly in the product cycle. Magnetizinginductance is seen as the dominant component inthe open circuit measurement from I kHz toIOOkHz. In manufacturing tests, it should bemeasured in this range. (Typical testing is done at
IkHz).
Figure 15. Transformer production problem- allparameters of the transformer are the same
except the resonantfrequency- the manufactureromitted a single layer of tape, and the power
supply no longer worked!
AI-I0

The change in resonant frequency actuallycorresponded to a change of winding capacitancefrom l6pF to 52pF. This was due to themanufacturer omitting a layer of tape in thewindings! There were no safety issues in thiscase and the output was line-side referenced. Theincreased capacitance caused a current spike inthe control circuit, which prematurely tripped thePWM controller, and prevented proper circuit
operation.
Fig. 16 shows a set of capacitor measurementsuseful for power supply design. The tantalumcapacitor is the type used in the example of loopgain earlier in the paper. The measured esr isabout -20dBQ (O.IQ), compared with the datasheet which specifies a maximum impedance atIOOkHz of7.SQ.
Also plotted in the figure is the impedance of a22JlF electrolytic capacitor. The tantalum andelectrolytic have the same impedances up to afew kHz. The esr of this particular electrolyticwas OdB.0., or 1.0.. Clearly, the tantalum capacitorwill do a better job of filtering higher frequencynoIse.
Sometimes, even in the best designs, (scarythough this is to management and purchasingdepartments!) a layer of tape is all that standsbetween success and failure of a product.Frequency response measurements during thedevelopment process are a tremendous help indetecting understanding, and solving subtle butpotentially expensive problems like this.
There are many more details, of course, tofrequency response testing and assessment ofmagnetics. These are covered in considerablepractical detail in Ridley Engineering's designcourses [6].
x. CAP ACITOR MEASUREMENTS
In the loop gain design example earlier in thispaper, a wrong capacitor esr value almost causeda very expensive problem in a power supplydesign. This was despite the fact thatconventional wisdom would define the capacitoras "better" than its specification. The loop gainmeasurement was far from prediction, and thecapacitor esr was found to be 30 times lower thanthe specified maximum from the data sheets.
Figure 16. Impedances of different types of
capacitors.
The final curve is the impedance of a multilayerceramic capacitor. Notice that above 200kHz, theMLC, with a value of only 1 J.lF, has a lowerimpedance than the 22J.lF electrolytic capacitor.For equivalent values, 22 of the lJ.lF MLC capswould give vastly superior performance. Onereason we don't use this type of capacitorextensively in power supplies is the cost.
Surprisingly, this is not an uncommonexperience. Manufacturers often do not have thetime, equipment, or incentive to properlycharacterize and document their components forthe design engineer. It is good engineeringpractice to measure every capacitor destined foryour power supply, and make sure the acceptablerange of the parasitic components are welldefined. And you should do this across the entiretemperature range the components will operateIn.
XI. SUMMARY
In today's marketplace, you cannot risk productfailure. Modeling alone does not guaranteecontrol loop stability. Measurement of controlloops and components with a frequency responseanalyzer is an essential design step.
Al-ll

The critical factors to remember in all yourdesigns are: XII. REFERENCES
R.D. Middlebrook, S. Cuk, "A General UnifiedApproach to Modeling Switching ConverterPower Stages, " IEEE Power Electronics
Specialists Conference, 1984 Record, pp. 18-34.
You must measure power supply control loopstability for reliable design. This should bedone at every stage of development andprototyping. In some instances, it makessense to incorporate loop measurement aspart of manufacturing, especially for lowvolume production, and high reliability
supplies.
V. Vorperian, "Simplified Analysis of PWMConverters Using the Model of the PWM Switch:Parts I and 1l", IEEE Transactions on Aerospaceand Electronic Systems, March 1990, Vol. 26,No.2, pp. 490-505.Modeling is almost always inaccurate the
first time. Simplified models often fail toaccount for the parasitics and circuit eventsthat you may see in your design. The firstcontrol loop stability measurement will
usually surprise you.
V. vorperian, R. Tymerski, K.H. Liu, F.C. Lee,"Generalized Resonant Switches Part 2: Analysisand Circuit Models, " VPEC Power Electronics
Seminar Proceedings, Virginia PolytechnicInstitute and State University, Blacksburg, V A,pp. 124-131,1986.
Frequency response analyzers are nowaffordable. There's no reasonfor anycompany developing power supplies to bewithout one -you simply cannot afford therisk of shipping a product with an unknown
stability margin.
R.B. Ridley, "A New Small-Signal Model forCurrent-Mode Control", PhD Dissertation,Virginia Polytechnic Institute and StateUniversity, November, 1990. See web site toorder.
Switching power supply design information,design tips, frequency response analyzers, andeducational material for power supplies can befound at the web site located at:httP :1 Iwww .ridleven(!ineerin(!.com
Component impedance measurement is avaluable capability of frequency responseanalyzers. Measurement of powercomponents gives you critical design datathat is often unavailable from manufacturers.
Ray Ridley has specialized in the modeling,design, analysis, and measurement of switchingpower supplies for over 20 years. He hasdesigned many power converters that have beenplaced in successful commercial production. Inaddition he has consulted both on the design ofpower converters and on the engineeringprocesses required for successful powerconverter designs.
Ridley Engineering, Inc. "High-FrequencyMagnetics Design " professional engineering
seminar taught semi-annually. See [5].
Ridley Engineering, Inc. is a recognized industryleader in switching power supply design, and isthe only company today offering a combinationof the most advanced application theory, designsoftware, design hardware, training courses, andin-depth modeling of power systems.
Al-12

IMPORTANT NOTICE
Texas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinueany product or service without notice, and advise customers to obtain the latest version of relevant informationto verify, before placing orders, that information being relied on is current and complete. All products are soldsubject to the terms and conditions of sale supplied at the time of order acknowledgment, including thosepertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its products to the specifications applicable at the time of sale in accordance withTI’s standard warranty. Testing and other quality control techniques are utilized to the extent TI deems necessaryto support this warranty. Specific testing of all parameters of each device is not necessarily performed, exceptthose mandated by government requirements.
Customers are responsible for their applications using TI components.
In order to minimize risks associated with the customer’s applications, adequate design and operatingsafeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or representthat any license, either express or implied, is granted under any patent right, copyright, mask work right, or otherintellectual property right of TI covering or relating to any combination, machine, or process in which suchproducts or services might be or are used. TI’s publication of information regarding any third party’s productsor services does not constitute TI’s approval, license, warranty or endorsement thereof.
Reproduction of information in TI data books or data sheets is permissible only if reproduction is withoutalteration and is accompanied by all associated warranties, conditions, limitations and notices. Representationor reproduction of this information with alteration voids all warranties provided for an associated TI product orservice, is an unfair and deceptive business practice, and TI is not responsible nor liable for any such use.
Resale of TI’s products or services with statements different from or beyond the parameters stated by TI forthat product or service voids all express and any implied warranties for the associated TI product or service,is an unfair and deceptive business practice, and TI is not responsible nor liable for any such use.
Also see: Standard Terms and Conditions of Sale for Semiconductor Products. www.ti.com/sc/docs/stdterms.htm
Mailing Address:
Texas InstrumentsPost Office Box 655303Dallas, Texas 75265
Copyright 2001, Texas Instruments Incorporated