-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
1/21
Available online at www.sciencedirect.com
International Journal of Mechanical Sciences 44 (2002)
20672087
Frequency domain analysis of uidstructure interaction
inliquid-lled pipe systems by transfer matrix method
Q.S. Lia ;, Ke Yanga;b, Lixiang Zhangc, N. Zhanga; d
aDepartment of Building and Construction, City University of
Hong Kong, 83 Tat Chee Avenue,
Kowloon Hong KongbCollege of Architectural and Civil
Engineering, Wenzhou University, Wenzhou, ChinacSchool of Electric
Power Engineering, Kunming University of Science and Technology,
Kunming, China
d Faculty of Engineering, University of Technology, Sydney,
Australia
Received 22 February 2002; received in revised form 23 August
2002; accepted 3 October 2002
Abstract
This paper is concerned with the vibration analysis of a
liquid-lled pipe system, which extends the fre-
quency domain analysis of the uidstructure interaction from
single pipe to a pipe system with multi-pipe
sections using transfer matrix method. Taking into account all
the three major coupling mechanisms, namely
the friction coupling, Poisson coupling and junction coupling,
the proposed method can be used to analyze thefree vibration and
the forced vibration of a pipe system with multi-pipe sections
subjected to various kinds of
external excitations. The transform matrix, impedance matrix and
frequency equation in frequency domain are
also presented and discussed. Numerical examples are presented
to illustrate the application of the proposed
method, which shows how the natural frequencies and mode shapes
change with the radius and materials of
the pipe system.
? 2002 Elsevier Science Ltd. All rights reserved.
Keywords: Fluidstructure interaction; Transfer matrix method;
Liquid-lled pipe systems; Laplace transform; Frequency
domain
1. Introduction
The uidstructure interaction (FSI) in liquid-lled pipe systems
has been investigated extensively,
because of its relevance to mechanical, civil, nuclear and
aeronautical engineering. It has been widely
accepted that in dynamic analysis of liquid-lled pipe systems,
neglecting FSI may lead to unrealistic
predictions. Literature reviews on the advances in this eld were
given in Refs. [14]. Therefore,
Corresponding author. Tel.: +852-2784-4677; fax:
+852-2788-7612.
E-mail address: [email protected] (Q.S. Li).
0020-7403/02/$ - see front matter ? 2002 Elsevier Science Ltd.
All rights reserved.P I I : S 0020- 7403(02)00170- 4
mailto:[email protected]:[email protected]
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
2/21
2068 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
only several previous investigations which are directly related
to the present study are reviewed
below.
First of all, it is necessary to declare the three major
coupling mechanisms of FSI in pipe systems,
namely friction coupling, Poisson coupling and junction
coupling. The friction coupling representsan axial interaction
caused by friction between uid and pipe. The Poisson coupling is
such an
interaction that the change of uid pressure causes additional
hoop stress in pipe wall and then,
owing to Poisson ratio, induces corresponding normal stress in
pipe wall, and vice versa. The
junction coupling occurs only at the boundaries or the junction
of two pipe sections. Mathematically,
the Poisson and friction coupling make the governing equations
coupled each other and cause the
equations much dierent from the traditional ones [5], whereas
the junction coupling is normally
expressed as the boundary conditions, among the three coupling
mechanisms, the junction coupling is,
therefore, the easiest one to deal with. In the present study,
all the three major coupling mechanisms
are taken into account.
Thorley [6] was the rst who pointed out the existence of
precursor wave caused by the Poissoncoupling, and Vardy and Fan [7]
veried it through a well-designed experiment. Their
experimental
results will be used in the numerical example of this paper to
verify the accuracy of the proposed
method.
Charley and Caignaert [8] used experimental data to demonstrate
that transfer matrices with con-
sidering FSI can predict much better the measured pressure
spectra than the classical waterhammer
[5] transfer matrices, even in simple systems.
Dsouza and Oldenburger [9] presented one of the earliest studies
in the eld. In their paper,
the Laplace transform was used to solve an equation included the
friction and junction coupling.
Wilkinson [10] presented transfer matrices for the axial,
lateral and torsional vibration of pipes.
He considered the junction coupling, but without considering the
friction and Poisson coupling.
El-Raheb [11] and Nanayakkara and Perreira [12] derived transfer
matrices for straight and curvedpipes, including the eects of the
junction coupling but excluding those of the Poisson and
friction
coupling. Kuiken [13] studied the eects of the Poisson and
junction coupling through a numerical
simulation.
Lesmez [14], Lesmez et al. [15], Hateld et al. [16] and Wiggert
et al. [17] (in time domain),
Tentarelli [18], Brown and Tentarelli [19] and De Jong [20,21]
(in frequency domain), Svingen and
Kjeldsen [22] and Svingen [23] (based on the nite element
method) applied the transfer matrix
method (TMM) to one-dimensional wave problems.
Among the above-mentioned studies, only in Refs. [18,19] the
friction coupling was taken into
account. Moreover, the dynamic behavior of uid-lled pipes with
non-uniform cross-section or
variable material properties was not investigated in these
studies.Dierent from these studies, Zhang et al. [24] obtained a
solution of the four-equation model
of FSI in the frequency domain in which the impact loads are
considered. Followed by a series of
researches conducted in recent years [2531], it has been proved
that the frequency-based approaches
are ecient for the analysis of FSI in liquid-lled pipe systems.
However, up to now, this kind of
method has been used for single pipes only. In this paper, based
on these studies, a transfer matrix
method is developed for the analysis of FSI in a series pipe
system which may consist of many
sections of pipes. Meanwhile, some previously not considered
aspects are also taken into account
in this paper, which include the frequency equations, the
impedance matrix, the frequency response
matrix and the mode shapes. At the end of this paper, numerical
examples are presented to illustrate
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
3/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2069
the application of the proposed method and to investigate the
eects of the radius and the material
properties of pipes on the dynamic behavior of a pipe
system.
In addition to the analysis of free vibration and frequency
response of a liquid-lled pipe system,
the present TMM aims mainly at determining the solution for FSI
at any point of the system whenthe system is subjected to external
excitations in order to make the transient solution in time
domain
possible by taking inverse Laplace transform.
2. The frequency domain solution for single pipe and
discussions
Following the derivation given in Ref. [13], the frequency
domain solution for a single pipe is
rewritten in this section, meanwhile, some discussions are given
and expansions are made.
2.1. The governing equation and its uncoupling
The governing equation for a uid-lled pipe system can be
expressed with matrices as
A@y(z;t)
@t+ B
@y(z;t)
@z+ Cy(z;t) = r(z;t); (1)
where y(z;t) is a vector of unknowns
y(z;t) = [V; H; uz ; h]T; (2)
where V = V(z;t) and H = H(z;t) are the cross-sectional average
speed and the cross-sectional
pressure head of liquid, respectively; uz = uz(z;t) is the
cross-sectional average speed along the
direction of z and h = h(z;t) is the cross-sectional average
stress head of pipe wall. r(z;t) in the
right-hand side of Eq. (1) is the external excitation acting
along the pipe. H=H(z;t) and h =h(z;t)
are dened below related to pressure P = P(z;t) and normal stress
z = z(z;t) as
H(z;t) =P(z;t)
gf+ z sin()
P0(z)
gf;
h(z;t) =z(z;t)
gt+ z sin()
0(z)
gt; (3)
where is the elevation angle of the pipe; P0(z); 0(z) are the
initial pressure and initial stress,respectively; and t and f are
the density of the pipe and liquid, respectively.
Other parameters in Eq. (1) are
A =
1 0 0 0
0 g=c2F 0 0
0 0 1 0
0fgR
tec2T
0 1
tc2T
; B =
0 g 0 0
1 0 2 0
0 0 0 1=t
0 0 1 0
; (4)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
4/21
2070 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
where
c2
F=
1
f1
k+
2R(1 2)
eE1
; c2
T=
E
t: (5)
In Eq. (5) L is the length of the pipe, is Poissons ratio, R is
the inner radius of the pipe, e
is the thickness of the pipe wall, E is elastic modulus, g is
the gravity and K is the bulk elastic
modulus of liquid. Matrix C contains the coecients of friction
and structural viscous damping.
When the laminar ow model is adopted, C is a constant matrix
[12].
In Eq. (4), the terms a42 = fgR=tec2T and b23 = 2 represent the
Poisson coupling, which,
together with matrix C, make the governing equations coupled
each other.
Taking the Laplace transform, denoted by L(), for Eq. (1)
results in
sA(s)Y(z;s) + B@Y(z;s)
@z
= r(z;s); (6)
where
Y(z;s) =L(y(z;t));
A(s) = A + C=s;
r(z;s) =L(r(z;t)) + A(s)y(z; 0) (7)
in which y(z; 0) is a vector of the initial conditions.
From a generalized eigenvalues problem |BA|=0 one obtains a
diagonal matrix with eigenvaluesin the diagonal elements
= diag{1(s); 2(s); 3(s); 4(s)}
= diag{1(s); 1(s); 3(s); 3(s)} (8)
and the full matrix S(s) whose columns are the corresponding
eigenvectors satises [5]
BS(s) = A(s)S(s)(s): (9)
Evidently, matrix S(s) is regular, and in a frictionless system
C = 0, the eigenvalues i, and the
elements of matrices A and S are all real numbers independent of
s.
Multiplying Eq. (1) with
T(s) = S1(s)A1(s) (10)
and then combined with Eq. (9) yield
sv(z;s) + @v(z;s)
@z= T(s) r(z;s); (11)
where
v(z;s) = T(s)A(s)Y(z;s): (12)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
5/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2071
Since is a diagonal matrix, Eq. (11) is a set of four
independent ordinary equations with
complex constant coecients, and its general solution is
v(z;s) = E(z;s)v0(s) + q(z;s); (13)
where
E(z;s) = diag
exp
s
1(s)z
; exp
s
1(s)z
; exp
s
3(s)z
; exp
s
3(s)z
;
v(z;s) = {v1; v2; v3; v4}T; q(z;s) = {q1; q2; q3; q4}
T:
(14)
v0 = v0(s) contains undetermined integration constants depending
on the boundary conditions, and
q(z;s) is a particular solution. When denoting
T r= [
r1(
z;s)
; r2(
z;s)
; r3(
z;s)
; r4(
z;s)]
T;(15)
the elements of vector q(z;s) can be determined by
qi =sesz=i (s)
i(s)
z0
ri(x;s)esx=i (s) d x; i= 1; 2; 3; 4:
From Eq. (12) and with S(s) = (T(s)A(s))1, we have
Y(z;s) = K(z;s)v0(s) + Q(z;s); (16)
where
K(z;s) = S(s)E(z;s); Q(z;s) = S(s)q(z;s): (17)It is evident that
K(z;s) is regular.
2.2. The boundary conditions and their forms
To meet the needs of the transfer matrix method, it is necessary
to express the boundary condi-
tions in matrix forms at individual end instead of at both ends
of a single pipe. After taking the
Laplace transform, the boundary conditions at an end point of a
pipe can be generally expressed in
matrix as
D(s)Y( z;s) = f(s); (18)where D and f can be determined
according to the forms of the boundary conditions. f is
illustrated
in the following equations (Eqs. (19)(21)) in the form of fr; fR
and fm. In Y( z;s) (dened in
Eq. (7)) z is the coordinate of the end (e.g., 0 or the length
of the pipe L).
The following is some examples for several boundary conditions
expressed in this manner.
(1) Reservoir (or an opened end): If the pipe is xed at this
end, we have
Dr =
0 0 1 0
0 1 0 0
; fr(s) = [ug(s) 0]
T; (19)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
6/21
2072 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
where ug denotes the ground velocity, e.g., when it is subjected
to an earthquake excitation. The
pressure Po of the reservoir is taken into account in H (see Eq.
(3))
(2) Closed valve or closed end with mass m:
(a) Pipe xed
DR =
1 0 0 0
0 0 1 0
; fR(s) = [ug(s) ug(s)]
T: (20)
(b) Pipe is movable in axial direction
Dm =
1 0 1 0
0 gfAf sm gtAt
; fm = [0 Rl(s)]
T; (21)
where Af; At are the area of inner part of the pipe and area of
the pipe wall, respectively. m is the
mass of valve or the sealed end etc. The sign is determined
according to the direction of thecoordinate and the position where
the mass or the excitation appears. Rl is the Laplace transform
of
the external excitation at the corresponding end. In the case
shown in Fig. 2, Rl can be written as
Rl = Ar
Err(esTc 1)=s; (22)
where the subscript r denotes the property of the impacting
rod.
Eq. (21) shows an example of the junction coupling since V and
uz, or H andh, appear in the
same equation of boundary condition.
With the above expressions, the boundary conditions can be
written with relatively simple and
unied forms. For example, when a single pipe is xed and
connected with a reservoir at theupstream end z = 0, and is xed and
connected with a closed valve at the downstream end z = L,
then the boundary conditions can be written as
DrY(0; s) = fr(s); DRY(L;s) = fR(s): (23)
2.3. The frequency domain solution for a single pipe
In Eq. (16), let z = 0 and z = L, we get eight relations between
the unknowns and undetermined
integration constants, namely
Y(0; s) = K(0; s)v0(s) + Q(0; s); (24)
Y(L;s) = K(L;s)v0(s) + Q(L;s): (25)
There are only two boundary conditions at the end z = 0 or L.
The general expressions are
[Dup(s)]24{Y(0; s)}41 = {F(0; s)}21;
[Ddown(s)]24{Y(L;s)}41 = {F(L;s)}21;(26)
where the subscripts outside the bracket denote the numbers of
row and column of the matrix.
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
7/21
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
8/21
2074 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
or in matrix form as follows:
[[I]44
[
S(s)E1(L;s)S1(s)]44
] Y(0; s)Y(L;s)
81
= 0 (35)
by setting the right-hand term equal to zero, Eq. (26)
yields
[Dup(s)]24{Y(0; s)}41 = 0; (36)
[Ddown(s)]24{Y(L;s)}41 = 0: (37)
Combining Eqs. (35)(37), we get
[Dup(s)]24 [0]24
[0]24 [Ddown(s)]24
[I]44 [ S(s)E1(L;s)S1(s)]44
Y(0; s)Y(L;s)
81
= 0; (38)
where [0] is a zero matrix. Since Y is not always equal to zero,
there must be
[Dup(s)]24 0
0 [Ddown(s)]24
[I]44 [ S(s)E1(L;s)S1(s)]44
= 0: (39)
Eq. (39) is the desired frequency equation with s = + j! as
variable, the complex frequencies can be obtained by setting the
real part and the imaginary part of Eq. (39) equal to zero,
respectively.
Taking F of Eq. (31) equal to zero yields
Z(z;s)Y = 0: (40)
Therefore, when the ith natural frequency is gained, with Eq.
(40), the mode shape function of the
system corresponding to the ith natural frequency can be
obtained with standard methods [3235].
3. The transfer matrix method for pipe systems with several
sections
A series pipe system consisting of several sections with dierent
radiuses, thickness of pipe wall
and material properties (see Fig. 1) is widely used in practices
such as in the high-pressure pipe
lines of water power stations. Meanwhile, if a pipeline under
the action of a concentrated force, the
pipe line must be divided into two sections for analysis. It is,
therefore, necessary to obtain the FSI
frequency domain response for a pipe system with
multi-sections.
Fig. 1 illustrates a series pipe system with N pipe sections
numbered 1; 2; : : : ; N from upstream
to downstream. A point connecting two adjacent pipe sections is
called node, the sequence num-
bers is 0; 1; : : : ; N also from upstream to downstream. The
direction of axis z is from upstream to
downstream.
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
9/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2075
Fig. 1. The sections and nodes of pipe system.
The coordinate z of the ith section is used as local coordinate
and denoted as zi. For the ith
section, the upstream node, namely the (i 1)th node, has zi = 0
and its downstream node, namelythe ith node, has a coordinate zi =
Li. Adopting the local coordinate will make the formulas clear.
3.1. The eld transfer matrix
Since Eq. (16) is valid for all sections, then for the ith
section, we have
Yi(zi; s) = Ki(zi; s)v0i(s) + Qi(zi; s); i = 1; 2; : : : ; N ;
(41)
where v0i(s) is a vector of undetermined integration constants
related to the ith section (also see
Eqs. (13) and (14)). Substituting 0 and Li into Eq. (31)
yields
Yi(0; s) = Ki(0; s)v0i(s) + Qi(0; s);
Yi(Li; s) = Ki(Li; s)v0i(s) + Qi(Li; s):(42)
From Eq. (32), v0i(s) can be expressed as follows:
v0i(s) = K1i (0; s){Yi(0; s) Qi(0; s)};
v0i(s) = K1i (Li; s){Yi(Li; s) Qi(Li; s)};
(43)
which results in
K1i (0; s){Yi(0; s) Qi(0; s)} = K1i (Li; s){Yi(Li; s) Qi(Li; s)}
(44)
or
Yi(0; s) = Ki(0; s)K1i (Li; s)Yi(Li; s) + qi(z;s); (45)
where
qi(s) = Ki(0; s){Qi(0; s) K1i (Li; s)Qi(Li; s)}: (46)
We now dene the eld transfer matrix as
Fi(s) = Ki(0; s)K1i (Li; s) = SiE
1(Li; s)S1i ;
F1i (s) = S1i (s)E(Li; s)Si(s):
(47)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
10/21
2076 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
Fi(s) provides the relation between the unknowns at both ends of
a section
Yi(0; s) = Fi(s)Yi(Li; s) + qi(s): (48)
3.2. Point transfer matrix
The junction condition between the two pipe sections in Fig. 1
can be found in Ref. [29]. Here,
expressing them in matrix form and then taking Laplace transform
results in
DiYi(Li; s) = Di+1Yi+1(0; s) + P(out)i(s); i = 1; 2; : : : ; N
1: (49)
For the ith node, the matrix Di in Eq. (49) is of the form
Di =
Af(i) 0 Af(i) 0
0 1 0 0
0 0 1 0
0 Af(i) 0 At(i)
; P(out)i(s) =
0
0
L(Pout(t))
0
; (50)
where Af(i); At(i) are the area of liquid and the pipe wall in
the ith section, respectively. Obviously,
the matrix Di is regular. Pout is a concentrated external force
acting at the ith node. So the relation
between the unknowns of the ith and (i + 1)th sections is
provided by Eq. (49).
From Eq. (49), we have
Yi(Li; s) = D1i Di+1Yi+1(0; s) + D
1i P(out)i(s): (51)
The point transfer matrix of the ith node is dened as
Pi = D1i Di+1: (52)
With the point transfer matrix Pi, the unknowns on the both
sides of the ith node are related with
Yi(Li; s) = PiYi+1(0; s) + PiF(out)i(s); (53)
where
F(out)i(s) = D1i+1P(out)i(s): (54)
To make the expression clear, it must be pointed out that, in
this paper, only in the expressions ofPi; P(out)i(s); F(out)i(s)
the subscript i identies the ith node which is the downstream node
of section
i. For other variables and matrices, the subscript i identies
the ith pipe section.
3.3. The transfer matrix method
By means of the point transfer matrices and the eld transfer
matrices, the relation of the unknowns
in the ith and the (i + 1)th sections can be found by
substituting Eq. (48) into Eq. (53)
Yi(Li; s) = PiYi+1(0; s) + PiF(out)i(s) = PiFi+1(s)Yi+1(Li+1; s)
+ Pi Qi+1(s); (55)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
11/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2077
where
Qi+1(s) = F(out)i(s) + qi+1(s): (56)
Let Nn be the global transfer matrix and denoted by
Nn(s) =
ni=1
(Fi(s)Pi); n = 1; 2; : : : ; N 1; (57)
the general relation between the 1st and Nth sections is
Y1(0; s) = NN1(s)FN(s)YN(LN; s) +
Nk=2
Nk2(s)Pk1 Qk(s); N 2 (58)
in which we dene that N0 = I and
Q1 = q1, and the second right-hand term in Eq. (58) is equalto
zero if the upper limit is less than the lower limit.
For example, if the pipe system consists of three sections, from
Eq. (58) we have
Y1(0) = F1P1F2P2F3Y3(L3) + ( q1 + F1P1 Q2 + F1P1F2P2 Q3)
or
Y1(0) =
2i=1
(FiPi)F3Y3(L3) +
q1 +
1i=1
(FiPi) Q2 +
2i=1
(FiPi) Q3
;
Y1(0) = N2F3Y3(L3) + ( q1 + N1 Q2 + N2 Q3):
(59)
Similar to Eqs. (27) and (28), another four algebra equations
are
[Dup(s)]24{Y(0; s)}41 = {F(0; s)}21;
[Ddown(s)]24{Y(L;s)}41 = {F(L;s)}21:(60)
At last, we have eight algebra equations with eight unknowns,
namely Eqs. (58) and (60), and we
rewrite them in a unied matrix form
[G(s)]88
Y(0; s)
Y(LN; s)
81
= [Q(s)]81; (61)
where
G(s) =
[Dup]24 [0]24
[0]24 [Ddown]24
[I]44 [ NN1(s)FN(s)]44
; (62)
Q(s) =
F(0; s); F(LN; s);
Nk=2
Nk2(s)Pk1 Qk(s)
T: (63)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
12/21
2078 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
Denoting
G1(s) = [G1(s)]48
[ G2(s)]48 ; (64)
then
v01(s) = G1(s)Q(s); v0N(s) = G2(s)Q(s): (65)
By using Eq. (65), and with the reverse process used in the
above deduction, we can obtain the
solution for any intermediate section from the upstream to
downstream, and vice verse.
First, let us go from upstream to downstream. If the solution
Yi(Li) in the ith section has been
obtained, the following three formulas can be used successively
to get the solution for the (i + 1)th
section:
from Eq. (49)
Yi+1(0) = P1i Yi(Li) (Fout)i; (66)
from Eq. (43)
v0(i+1) = K1i+1(0; s){Yi+1(0) Qi+1(0)}; (67)
from Eq. (41)
Yi+1(z;s) = Ki+1(z;s)v0(i+1)(s) + Qi+1(z): (68)
Eq. (68) gives the general frequency domain solutions for the (i
+ 1)th section. Let z = Li+1 in
Eq. (68), Yi+1(Li+1) is determined, then go back to Eq. (66),
the solution for the (i + 2)th section
can then be obtained, and so on.
Similarly, taking the inverse way, going from downstream to
upstream, the solutions for interme-
diate sections can also be obtained. Namely, if Yi(z;s) in the
ith section has been known, Yi(0; s)
is, therefore, known. The following three formulas can be used
successively to get the solutions for
intermediate sections, since the right-hand side in each formula
is known.
Yi1(Li1) = Pi1Yi(0) + Pi1(Fout)i1; (69)
v0(i1) = K1i1(0; s){Yi1(Li1) Qi1(Li1)}; (70)
Yi1(z;s) = Ki1(z;s)v0(i1) + Qi1(z): (71)
The above-mentioned method is generally used for calculating the
frequency domain response ofthe system subjected to external
excitations. When the inverse Laplace transform is adopted, the
transient response of the system can also be obtained. On the
other hand, for calculating the natural
frequencies, we can simply take the right-hand side of Eq. (61)
equal to zero, namely
|G(s)| = 0: (72)
For calculating the corresponding complex mode shapes, the
following equation that is similar to
Eq. (40) for each pipe section can be used
Zi( zi; s)Yi( zi; s) = 0: (73)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
13/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2079
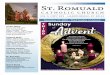
Fig. 2. Experiment rig of steel pipe [7].
Table 1
Geometrical and material properties of the pipe apparatus
[7]
Steel Pipe Water Steel Rod
L = 4:5 m length K = 2:14 GPa bulk model Lr = 5:02 m length
R = 52:0 mm inner radius t = 999 kg=m3 density Er = 200 GPa
Youngs modulus
e = 3:945 mm pipe wall thickness P0 = 2:0 MPa initial pressure r
= 7848 kg= m3 density
E= 168 GPa Youngs modulus vr = 1 m=s velocity
= 0:3 Poissons ratio Tc = 1:98 ms impact time
t = 7985 kg=m3 density of pipe Vr = 0:1175 m=s impact
velocity
m0 = 1:312 kg mass at z = 0
mL = 0:3258 kg mass at z = L
4. Numerical examples and discussions
Vardy and Fan [7] has designed an experiment rig to make
accurate measurement and to study the
dynamic behavior of waterhammer. The test rig is shown in Fig. 2
and the specications are list in
Table 1. This rig consists of a water-lled pipe closed at both
ends (with mass m0, mL, respectively)
and suspended by wires. The closed pipe is subjected to axial
impact by a steel rod at the end of
z =0 to generate transients. This rig has its superiority to
conventional reservoir-pipe-valve system in
describing the inuence of FSI. Also, in this apparatus, eects of
friction and gravity are unimportant,
and the inuences of uidstructure interaction related to the
Poisson and junction couplings can be
clearly isolated in case of axial wave propagation [29].
It can be seen from Eq. (3) that the two initial conditions are
H|t=0 =0 and h|t=0 =0. The systemis initially still, this problem
has, therefore, only zero initial condition. The boundary
conditions of
this system are1 0 1 0
0 gfAf sm gtAt
Y(0; s) = 0;
1 0 1 0
0 gfAf sm gtAt
Y(L2; s) = 0:
(74)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
14/21
2080 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
Fig. 3. The analytical model for the TMM.
Table 2
Frequency results of a single pipe
Results Frequencies in mode sequence numbers (0:5 Hz)
1 2 3 4 5 6 7 8
Test [7] 173 289 459 485 636 750 918 968
Zhang et al. [24] 172 286 455 473 627 741 907 945
Reduced TMM 172 286 454 472 627 741 907 945
R1 = R2 = R=2 167 303 458 470 635 772 874 939
Table 3
TMM results with m0 = mL and L1 = L2 = L=2
Results Frequencies in mode sequence numbers (0:5 Hz)
1 2 3 4 5 6 7 8
R1 = R2 = R=2 167 302 434 470 633 769 874 939
R1 = R; R2 = R=2 166 302 439 471 607 769 905 914
Reduced TMM 171 285 454 460 624 740 907 921
E1 = E; E2 = 3E=4 169 278 432 449 614 725 873 894
E1 = E2 = 3E=4 167 271 414 442 605 706 828 889
In the numerical example, the total length of the system remains
as unchanged, and at the middle point, the pipe is divided into two
parts, each of them has a length L=2. This makes it possible
for
the TMM calculation to be consistent with the original test by
taking the parameters of the two pipe
sections identical (Fig. 3). In fact, by doing so, the present
TMM does get the same results as Ref.
[24] (see Table 2 Reduced TMM).
Due to symmetry, let the two masses be both equal to m0. The
results are listed in Reduced
TMM of Table 3.
In the numerical example, two cases are considered separately.
One is that the radius of the second
pipe section is equal to R=2, the other is changing E to 3E=4 at
the second pipe section. Both cases
keep the parameters of the rst pipe section to be the same as
those listed in Table 1. In order to
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
15/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2081
-8.0
-6.0
-4.0
-2.0
0.0
2.0
4.0
1 101 201 301 401 501 601 701 801 901
Frequency in Hz
log(abs(H))
E and E
3E/4 and 3E/4
E and 3E/4
Fig. 4. The frequency response of the two-section pipe changing
with R.
log(abs(H))
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
3.0
4.0
1 101 201 301 401 501 601 701 801 901
Frequency in Hz
R and R
R/2 and R/2
R and R/2
Fig. 5. The frequency response of the two-section pipe changing
with E.
compare the results clearly, the results of a single pipe with
R=2 or 3E=4 are also listed in Table 3.
The frequency responses are shown in Figs. 4 and 5.
As is well known, the kth frequency fk and the mode shape
function uk of a solid rod with both
ends free can be expressed as
fk =k
2L
E
t; uk = cos
k
Lz
: (75)
Eq. (75) means that the frequencies and mode shape functions of
such a solid rod are independent
on the radius of the rod. However, for the present problem, the
frequencies are signicantly dependent
on the radius. Even for the single pipe system when R of the
pipe decreases, the frequencies are
also obviously changed (see Table 2 and Fig. 4).
When the two masses m0 and mL are set equal to each other, only
the frequencies of the 4th and
8th modes change obviously. This shows that the frequencies of
these two modes mainly represent
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
16/21
2082 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
H/max(H)
R and R
R/2 and R/2
R and R/2
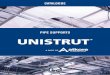
Fig. 6. The 1st mode of H changing with R.
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
V/max(V)
R/2 and R/2
R and R/2
R and R
Fig. 7. The 1st mode of V changing with R.
the vibration of the pipe and the other frequencies mainly
depend on uid. Therefore, only the 1st
mode (mainly depending on uid) and the 4th mode (representing
the vibration of the pipe) are
discussed in detail below.In the published papers [2427] using
the frequency domain methods, the mode shapes were not
presented. In this study, the mode shapes are determined and
shown in Figs. 612. For the present
problem, the 2nd and 4th columns of the matrix H(z;s) are the
response of the system subjected
to a unit impulse excitation at the upstream and downstream end,
respectively. The mode shapes
in Figs. 612 are obtained from the 2nd column of the matrix
H(z;s) (see Eq. (32)) by taking
s = j!k, here !k is the kth natural frequency of the system. The
4th column gives the same results.
Figs. 612 are obtained by taking the real parts of the
corresponding unknowns, namely
V = real(L(V)); H = real(L(H)); U = real(L(u)) (76)
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
17/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2083
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
H/max(H)
R and R
R/2 and R/2
R and R/2
Fig. 8. The 4th mode of H changing with R.
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
U/max(U)
R and R
R/2 and R/2
R and R/2
Fig. 9. The 4th mode of U changing with R.
in which V ; H ; u are the same as those dened in Eq. (2). For
the mode shapes, taking the
imaginary parts one obtains the same results.
It is worth mentioning that, when the two sections have dierent
R, the mode of H is dierent
in the two sections (see Figs. 68). However, the mode of V has a
sudden change in the junction
point for keeping the discharge Qi be equal at both sides of the
node (see Fig. 7), in as much as
Qi = ViAfi and Afi are dierent at two sides of the ith node.
From Figs. 9 and 12, it can be seen that
the mode of U is approximately a cosine, but the frequency is
lower than the 1st natural frequency
of the solid rod (509 Hz).
5. Conclusion
In this paper, the uidstructure interaction in liquid-lled pipe
system is studied in frequency
domain using the transfer matrix method, which extends the
frequency domain analysis for FSI
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
18/21
2084 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
H/max(H)
E
3E/4
E and 3E/4
Fig. 10. The 1st mode of H changing with E.
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
H/max(H)
E
3E/4
E and 3E/4
Fig. 11. The 4th mode of H changing with E.
presented by Zhang et al. [24] from a single-section pipe to a
multi-section pipe system. Eorts are
also made to expand the results of the single pipe, of which the
frequency equations, the impedance
matrix, the frequency response matrix and the mode shapes are
especially worth mentioning. These
expansions are also applicable for pipelines with
multi-sections.In the analysis of FSI problems, the present
transfer matrix method is dierent from the traditional
one. In the case of the junction coupling, the unknowns in FSI
problems are coupled in boundary
conditions, they satisfy a set of algebra relations other than
each variable equals to a constant,
which makes it dicult to realize the transfer matrix method
directly. In this paper, the diculty is
overcome by nding out a unied matrix expression of the boundary
conditions.
The present method has included all the three major coupling
mechanisms, namely the friction
coupling, the Poisson coupling and the junction coupling, and
can deal with dynamic analysis of
liquid-lled pipe systems under various kinds of external
excitations. The method aims at conducting
both harmonic analysis and the frequency response analysis,
especially aim at obtaining the solution
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
19/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2085
-1.5
-1
-0.5
0
0.5
1
1.5
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
location z/L
U/max(U)
E
3E/4
E and 3E/4
Fig. 12. The 4th mode of U changing with E.
at any point of a pipe system, so that the transient response of
the pipe system subjected to various
excitations can be determined by the inverse Laplace
transform.
From the view point of practical applications, this is a simple
frequency domain method for the
analysis of pipe systems with various sections considering FSI.
In comparison with nite element
method (FEM) and method of characteristics (MOC) in time domain,
the present method needs
much fewer lines of code in programming.
The method is useful for the analysis of FSI in multi-section
pipe systems that are widely used in
engineering practices. Meanwhile, it is also useful for single
or multi-section pipe systems subjected
to concentrated force acting on the pipe systems.
Numerical examples show that the results determined by the
proposed method are in good agree-
ment with the experimental data, thus verifying the accuracy of
the proposed method. It is also
shown through the numerical examples that how the frequencies
and mode shapes change with the
radius and material properties of the pipe systems.
Acknowledgements
The authors thank for the nancial supports provided by the
National fund of Natural Science of
China (Project No.50079007), and The Ministry of Water
Resources, China (Project No. SZ9830)
for the study described in this paper.
References
[1] Paidoussis MP. Fluidstructure interactions. London: San
Diego Academic Press, 1998.
[2] Tijsseling AS. Fluidstructure interaction in liquid-lled
pipe systems: a review. Journal of Fluids and Structures
1996;10:10946.
[3] Paidoussis MP, Li GX. Pipes conveying uid: a model dynamical
problem. Journal of Fluids and Structures
1993;7(2):137204.
[4] Li-xiang Zhang, Wen-hu Huang. Fluidstructure interaction in
least constrained piping systems: a review. Journal of
Hydrodynamics, Series A 1999;14(1):10211.
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
20/21
2086 Q.S. Li et al. / International Journal of Mechanical
Sciences 44 (2002) 2067 2087
[5] Wylie EB, Streeter VL. Fluid transients in systems.
Englewood Clis, NJ: Prentice-Hall, 1993.
[6] Thorley ARD. Pressure transients in hydraulic pipelines.
ASME Journal of Basic Engineering 1969;91:45361.
[7] Vardy AE, Fan D. Water hammer in a closed tube. Proceedings
of the Fifth International Conference on the Pressure
Surge, BHRA, Hanover, Germany, September 1986. p. 12337.[8]
Charley J, Caignaert G. Vibroacoustical analysis of ow in pipes by
transfer matrix with uidstructure interaction.
Proceedings of the Sixth International Meeting of the IAHR Work
Group on the Behavior of Hydraulic Machinery
under Steady Oscillatory Conditions, Lausanne, Switzerland,
September 1993.
[9] Dsouza AF, Oldenburger R. Dynamic response of uid lines.
ASME Journal of Basic Engineering 1964;86:58998.
[10] Wilkinson DH. Acoustic and mechanical vibrations in
liquid-lled pipework systems. Proceedings of the BNES
International Conference on Vibration in Nuclear Plant, Keswick,
UK, May, Paper 8.5, 1978.
[11] EL-Raheb M. Vibrations of three-dimensional pipe systems
with acoustic coupling. Journal of Sound and Vibration
1981;78:3967.
[12] Nanayakkara S, Perreira ND. Wave propagation and
attenuation in piping systems. ASME Journal of Vibration,
Acoustics, Stress, and Reliability in Design 1986;108:4416.
[13] Kuiken GDC. Amplication of pressure uctuations due to
uidstructure interaction. Journal of Fluids and Structures
1988;2:42535.
[14] Lesmez MW. Modal analysis of vibrations in liquid-lled
piping systems. PhD thesis, Department of Civil and
Environmental Engineering, Michigan State University, East
Lansing, USA, 1989.
[15] Lesmez MW, Wiggert DC, Hateld FJ. Modal analysis of
vibrations in liquid-lled piping systems. ASME Journal
of Fluids Engineering 1990;112:3118.
[16] Hateld FJ, Wigger DC, Otwell RS. Fluid structure
interaction in piping by component method. ASME Journal of
Fluid Engineering 1982;104:31825.
[17] Wiggert DC, Hateld FJ, Stuckenbruck S. Analysis of liquid
and structural transients by the method of characteristics.
ASME Journal of Fluids Engineering 1987;109(2):1615.
[18] Tentarelli SC. Propagation of noise and vibration in
complex hydraulic tubing systems. PhD thesis, Department of
Mechanical Engineering, Lehigh University, Bethlehem, USA,
1990.
[19] Brown FT, Tentarelli SC. Analysis of noise and vibration in
complex tubing systems with uidwall interactions.
Proceedings of the 43rd National Conference on Fluid Power, USA,
October 1988. p. 13949.
[20] De Jong CAF. Analysis of pulsation and vibrations in
uid-lled pipe systems. PhD thesis, Eindhoven Universityof
Technology, Eindhoven, The Netherlands, ISBN
90-386-0074-7,1994.
[21] De Jong CAF. Analysis of pulsations and vibrations in
uid-lled pipe systems. Proceedings of the 1995 Design
Engineering Technical Conferences, Part B, Boston, USA,
September 3, 1995. p. 82934. ISBN 0-7918-1718-0.
[22] Svingen B, Kjeldsen M. Fluid structure interaction in
piping systems. Proceedings of the International Conference
on Finite Elements in Fluids, New Trends and Applications,
Venice, Italy, October 1995. p. 95563.
[23] Svingen B. Fluid structure interaction in slender pipes.
Proceedings of the Seventh International Conference on
Pressure Surges and Fluid Transients in Pipelines and Open
Channels, Harrogate, UK, April 1996. p. 38596.
[24] Li-xiang Zhang, Tijsseling AS, Vardy AE. Frequency response
analysis in internal ows. Journal of Hydrodynamics,
Series B 1995;10(3):3949.
[25] Lixiang Zhang, Tijsseling AS, Vardy AE. FSI frequency
response analysis of exible pipes. Chinese Journal of
Engineering Mechanics 1996;13(2):6977.
[26] Lixian Zhang. Frequency response analysis of pipeline under
any excitation. Journal of Hydrodynamics, Series B
1998;13(4):7189.
[27] Lixiang Zhang, Tijsseling AS, Vardy AE. FSI analysis of
liquid-lled pipes. Journal of Sound and Vibration
1999;224(1):6699.
[28] Ke Yang. Fluidstructure interaction in liquid-lled piping
system and reliability of time-dependent structures. PhD
thesis, Wuhan University of Technology, 1999.
[29] Tijsseling AS. Fluidstructure interaction in case of
water-hammer with cavitation. PhD thesis, Delft University of
Technology, 1993.
[30] Brown FT, Tentarelli SC. Dynamic behavior of complex
uid-lled systemsPart I: tubing analysis. Journal of
Dynamic Systems, Measurement and Control 2001;123(1):717.
[31] Tentarelli SC, Brown FT. Dynamic behavior of complex
uid-lled systemsPart II: system analysis. Journal of
Dynamic Systems, Measurement and Control 2001;123(1):7884.
-
8/3/2019 Frequency Domain Analysis of Fluid-structure
Interaction in Liquid Filled Pipe Systems by Transfer Matrix
Method
21/21
Q.S. Li et al. / International Journal of Mechanical Sciences 44
(2002) 2067 2087 2087
[32] Li QS. Exact solutions for free longitudinal vibrations of
non-uniform rods. Journal of Sound and Vibration
2000;234(1):119.
[33] Li QS. A new exact approach for determining natural
frequencies and mode shapes of non-uniform shear beams
with arbitrary distribution of mass or stiness. International
Journal of Solids and Structures 2000;37(37):512341.[34] Li QS, Li
GQ, Liu DK. Exact solutions for longitudinal vibration of rods
coupled by translational springs.
International Journal of Mechanical Sciences
2000;42(6):113552.
[35] Li QS. Free vibration of SDOF systems with arbitrary time
varying coecients. International Journal of Mechanical
Sciences 2001;43(3):75970.