Embed Size (px)
Citation preview

Icarus 206 (2010) 735–746
Contents lists available at ScienceDirect
Icarus
journal homepage: www.elsevier .com/locate / icarus
Fragmentation model dependence of collision cascades
Hiroshi Kobayashi a,b,*, Hidekazu Tanaka b
a Astrophysical Institute and University Observatory, Friedrich Schiller University, Schillergaesschen 2-3, 07745 Jena, Germanyb Institute of Low Temperature Science, Hokkaido University, Kita-Ku Kita 19 Nishi 8, Sapporo 060-0819, Japan
a r t i c l e i n f o a b s t r a c t
Article history:Received 12 June 2009Revised 24 September 2009Accepted 1 October 2009Available online 13 October 2009
Keywords:Collisional physicsAsteroids, DynamicsPlanetary dynamicsPlanetary formation
0019-1035/$ - see front matter � 2009 Elsevier Inc. Adoi:10.1016/j.icarus.2009.10.004
* Corresponding author. Address: Astrophysical Insvatory, Friedrich Schiller University, SchillergaesscheFax: +49 3641 947 532.
E-mail address: [email protected] (H. Ko
Mass depletion of bodies through successive collisional disruptions (i.e., collision cascade) is one of themost important processes in the studies of the asteroids belt, the Edgeworth-Kuiper belt, debris disks,and planetary formation. The collisional disruption is divided into two types, i.e., catastrophic disruptionand cratering. Although some studies of the collision cascades neglected the effect of cratering, it isunclear which type of disruption makes a dominant contribution to the collision cascades. In the presentstudy, we construct a simple outcome model describing both catastrophic disruption and cratering,which has some parameters characterizing the total ejecta mass, the mass of the largest fragment, andthe power-law exponent of the size distribution of fragments. Using this simple outcome model withparameters, we examine the model dependence of the mass depletion time in collision cascades forneglect of coalescence of colliding bodies due to high collisional velocities. We find the cratering colli-sions are much more effective in collision cascades than collisions with catastrophic disruption in a wideregion of the model parameters. It is also found that the mass depletion time in collision cascades ismainly governed by the total ejecta mass and almost insensitive to the mass of the largest fragmentand the power-law exponent of fragments for a realistic parameter region. The total ejecta mass is usuallydetermined by the ratio of the impact energy divided by the target mass (i.e. Q-value) to its thresholdvalue QH
D for catastrophic disruption, as well as in our simple model. We derive a mass depletion timein collision cascades, which is determined by QH
D of the high-mass end of collision cascades. The massdepletion time derived with our model would be applicable to debris disks and planetary formation.
� 2009 Elsevier Inc. All rights reserved.
1. Introduction
Disruption by successive high-velocity collisions plays animportant role in evolution of the asteroid belt (e.g., Bottke et al.,2005), the Edgeworth-Kuiper belt (e.g., Stern and Colwell, 1997;Kenyon and Luu, 1999; Krivov et al., 2005; Kenyon et al., 2008),and debris disks (e.g., Löhne et al., 2008; Kenyon and Bromley,2004, 2008). The successive collisional disruptions form the so-called ‘‘collision cascade”. In collision cascades, bodies becomesmaller and smaller by successive collisions and a (constant)downward mass flux in the mass space is produced (e.g., Tanakaet al., 1996). Very small bodies created in collision cascades are re-moved by the gas drag in protoplanetary disks, and by the Poyn-ting–Robertson effect, or the radiation pressure in debris disks.The downward mass flux is controlled by disruption of the largestbodies and the depletion rate of the total mass is determined bythe mass flux.
ll rights reserved.
titute and University Obser-n 2-3, 07745 Jena, Germany.
bayashi).
Collisional disruption is divided into two categories, i.e., cata-strophic disruption and cratering. The cratering is caused by low-energy impacts. The resulting total ejecta mass is much smallerthan the mass of the target. In contrast, the catastrophic disruptionwhich occurs in high-energy impacts fully destroys the target.Thus, the total mass of fragments in catastrophic disruption ismuch larger than that in cratering. However, the cratering causedby small impactors is much more frequent than the catastrophicdisruption. Dohnanyi (1969) and Williams and Wetherill (1994)suggested that the effect of cratering is much smaller than cata-strophic disruptions, using their collisional outcome model. Inmost of later analytic studies, the cratering is assumed to be negli-gible (e.g., O’Brien and Greenberg, 2003; Wyatt et al., 2007). How-ever, it should be noted that the collisional outcome model ofDohnanyi (1969) and Williams and Wetherill (1994) includes aparameter determining the total ejecta mass at a single crateringevent. Although the cratering is ineffective in the nominal casesof their papers, this result depends on the parameter. Such aimportant parameter should be fixed by comparing with resultsof laboratory experiments and/or hydrodynamic numerical simu-lations on collisional disruptions. In addition, the contribution ofcratering to the mass depletion rate (or mass flux) in collision cas-cades was not shown in numerical simulations including cratering

736 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
(e.g., Thébault and Augereau, 2007; Kenyon and Bromley, 2002,2008; Wetherill and Stewart, 1993; Inaba et al., 2003; Krivovet al., 2008). Hence it is still unclear which type of disruption isdominant in collision cascades.
The properties of collision cascades such as the mass depletionrate is strongly dependent on the outcome model of collision dis-ruption (i.e., the model of the size distribution of fragments createdat each collision). This dependence brings a large uncertainty ofcollision cascades. A simple outcome model of the cratering wouldbe characterized by the total mass of ejecta, the mass of the largestfragment (except for the eroded target) and the power-law expo-nent of the size distribution of fragments. When the impact energydivided by the target mass (i.e., Q-value) is large enough, the totalmass of ejecta is larger than the mass of the eroded target and thedisruption mode turns into the catastrophic disruption. The totalmass of ejecta determining the disruption mode would also governthe mass depletion rate in collision cascades. On the other hand, itis uncertain how the mass depletion rate depends on the mass ofthe largest fragment or the power-law exponent. Furthermore, lab-oratory experiments of collisional disruption showed that colli-sional outcomes are much more complex. For example, Takagiet al. (1984) showed for catastrophic disruption of basalt targetsthat the size distribution of fragments is expressed by threepower-laws rather than a single power-law. We have to clarifyhow collision cascades depends on such details of realistic colli-sional outcomes.
Debris disks observed around main-sequence stars would beformed through collisional disruption of planetesimals. Since theobserved small particles are removed in a short timescale, the dis-ruption of planetesimals is expected to be still on-going. The lumi-nosity of a debris disk gives us some information on the total massof planetesimals and their collision rate. Dominik and Decin (2003)developed a simple analytic model of debris disks and estimatedthe depletion time of total mass of bodies (or the total mass of dustdebris). Wyatt et al. (2007) proposed another analytic model. Theytook into account the velocity dependence of the depletion time.However, these studies use an extremely simple outcome model.They neglected the contribution of cratering collisions and didnot take into account the size distribution of fragments. Due to cra-tering collisions, the depletion time may be reduced significantly.Hence, using more realistic outcome model, we should revise theirsimple analytical model on the depletion time.
The collisional disruption is also important in the planet forma-tion process. Planetary embryos are formed through accretion ofplanetesimals. The embryos enhance the relative velocities be-tween planetesimals by their strong gravity. Inaba et al. (2003)showed that collisional disruption of planetesimals is dominantrather than their coalescence when embryos are Mars-size or lar-ger. The mass depletion of planetesimals due to disruption wouldslow down the growth of planetary embryos. Thus, the accuratemass depletion time of planetesimals is also required in the studyof planetary growth.
In the present study, we examine the dependence of collisioncascades on the outcome model of collisional disruption. To doso, we first construct a simple outcome model describing both cat-astrophic disruption and cratering. In our model, outcome is char-acterized by the total ejecta mass, the mass of the largest fragment,and the power-law exponent of the size distribution of fragmentswith some parameters. With this simple outcome model, we clarifyhow the cratering collisions affect the mass depletion time in col-lision cascades and how the mass depletion time depends on de-tails of the outcome model.
In Section 2, we describe basic equations governing evolution ofthe mass distribution due to disruption. In Section 3, we explainour outcome model of collisional disruption. In Section 4, assumingself-similar collision cascades, we analytically derive the mass flux
in the mass space of collision cascades. We will show that the cra-tering makes a dominant contribution to the mass flux comparedwith the catastrophic disruption. In Section 5, we also derive a sim-ple formula of the mass depletion time and compare it with that inthe previous studies. In Section 6, we check our analytical formula,by comparing with the numerical calculations. In Section 7, we fur-ther consider a non-self-similar case. We will find more generalexpressions of the mass depletion time in the non-self-similar case.In Section 8, using the obtained mass depletion time, we discussthe brightness evolution of debris disks due to collision cascadesand examine the depletion of planetesimals due to collisional dis-ruption and its effect on the planet growth. In the final section, wesummarize our results.
2. Basic equation
The mass distribution of bodies orbiting in a narrow annulusaround a central star evolves with their collisional disruptionand/or coalescence. The evolution is governed by the mass conser-vation law,
@mnsðmÞ@t
þ @FðmÞ@m
¼ 0; ð1Þ
where nsðmÞdm is the surface number density of bodies with massesranging from m to mþ dm and FðmÞ is the mass flux across mass m.Eq. (1) is valid if there is no removal of bodies from the annulus bygas drag, Poynting–Robertson effect, and radiation pressure. Themass flax FðmÞ is caused by collisions between bodies. Therefore,FðmÞ is proportional to the collisional frequency. The collisional fre-quency between bodies with masses ranging from m1 to m1 þ dm1
and those from m2 to m2 þ dm2 in unit area is given by (see Inabaet al., 2001)
XKnsðm1Þdm1nsðmÞdm2Pcol; ð2Þ
where XK is the Keplarian angular velocity at the annulus and Pcol isthe collision rate between two bodies with masses m1 and m2,which has a dimension of area. Inaba et al. (2001) also definedPcol in a similar way but they defined Pcol as a non-dimensionalquantity, by dividing it by the square of the Hill radius.
The collision rate Pcol is approximately estimated in the follow-ing way. In the present paper, we consider only the case where dis-ruption is dominant and neglect coalescence of bodies. Thiscorresponds to the case of high-velocity impacts. In this case, thegravitational focusing effect is also negligible and the collisionalcross section rcol is given by the geometrical one. On the otherhand, the mean collision time of the species 1 with 2 is inverselyproportional to the optical depth of the species 2 defined byrcolnsðm2Þdm2. Since the mean collision time is �1/XK when theoptical depth is unity, the mean collision time is given by1=½XKrcolnsðm2Þdm2�. Furthermore, noting that the collisional fre-quency between species 1 and 2 in unit area is equal to the surfacenumber density of the species 1 divided by the collision time of thespecies 1 with 2, and comparing it with Eq. (2), we obtain Pcol ’rcol ’ pðr1 þ r2Þ2.
The more exact expression of Pcol is derived by Greenzweig andLissauer (1992) or Inaba et al. (2001), by including the three bodieseffect, too. When the gravitational focusing is negligible, Pcol is gi-ven by
Pcol ¼ pðr1 þ r2Þ2FðIÞ2p2 ¼ h0m
231 1þ y
13
� �2ð3Þ
with
h0 ¼ 6:1� 10�2FðIÞq�2
3; ð4Þ
where y ¼ m2=m1; I is the ratio of the relative inclination betweenthe colliding bodies to the relative eccentricity, and q is the material

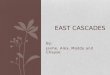
mL m1 − memass (m)
diffe
rent
ial n
umbe
r
m−b
ejecta
remnant
Fig. 1. The differential mass distribution of ejecta yielded from a body m1 by acollision between bodies of m1 and m2 as a function of mass m. For m < mL, thedifferential mass distribution of ejecta is proportional to m�b . The circle indicatesthe mass of the remnant body with m1 �me.
H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746 737
density of the colliding bodies. In many cases, the ratio I is assumedto be 0.5 and FðIÞ equals 17.3 (Greenzweig and Lissauer, 1992). Wealso adopt this assumption in the present paper. Then the correctionfactor FðIÞ=ð2p2Þ in Eq. (3) is calculated as 0.88, which indicatesthat the above approximate expression agrees with the exact oneonly with the error of �10%.
To describe the mass distribution of fragments created at a col-lision of two bodies with masses of m1 and m2, Tanaka et al. (1996)introduced a function f ðm;m1;m2Þ, which is the mass fraction ofthe fragments that are ejected from the body m1 and smaller thanthe mass m. Note that the fragments ejected from the body m1 andthose from the body m2 are described separately in their formula-tion with f ðm;m1;m2Þ. The total of the fragments smaller than mcreated by the collision is given by
m1f ðm;m1;m2Þ þm2f ðm;m2;m1Þ; ð5Þ
and the number of the fragments with masses from m to mþ dmcreated at the collision (denoted by nejectðmÞdm) is given by
1m
@
@m½m1f ðm;m1;m2Þ þm2f ðm;m2;m1Þ�dm: ð6Þ
If the function f ðm;m1;m2Þ has a power-law dependence asf ðm;m1;m2Þ / m�q for small fragments, the differential mass distri-bution function is proportional to m�q�2.
When the coalescence of bodies is negligible because of high-velocity impacts, we have for the (downward) mass flux (see Tana-ka et al., 1996)
FðmÞ ¼ �Z 1
mdm1
Z 1
0dm2 XKm1f ðm;m1;m2ÞPcolnsðm1Þnsðm2Þ:
ð7Þ
Since the integrand on the r.h.s. of Eq. (7) represents the mass fluxcoming from only m1, the upper and lower limits of integral over m2
should be the minimum mass and the maximum mass, respectively.The upper and lower limits can be assuming 0 and 1 when m ismuch smaller (larger) than the maximum (minimum) mass (seeAppendixes in Tanaka et al., 1996). Eq. (1) with Eq. (7) describesthe evolution of the mass distribution of bodies by collisional dis-ruption. To integrate Eq. (7), we need an explicit form of the func-tion f ðm;m1;m2Þ, which is dependent on the outcome model ofcollisional disruption.
3. Fragmentation model
We construct a simple model of collisional outcomes which hassome parameters. Changing the parameters in the model, we willexamine the dependence of properties of collision cascades onthe outcome model. Our outcome model gives the explicit formof the function f ðm;m1;m2Þ, which describes the mass distributionof fragments created at a collision between bodies with masses m1
and m2. We recall again that f ðm;m1;m2Þ describes only the frag-ments coming from the body 1 and that the fragments createdby a collision between m1 and m2 is given by Eq. (5).
Fig. 1 shows the mass distribution of fragments originated fromthe body 1 by a collision with the body 2 in our outcome model.The mass distribution consists of two parts, i.e., a power-law distri-bution of small fragments and one large remnant body. The power-law distribution is characterized by three quantities, the total massof fragments (or ejecta), me, the mass of the largest fragment (ex-cept for the remnant body), mL, and the power-law exponent, b.The mass of the remnant body is given by m1 �me. The mass dis-tribution is fixed by these three quantities in our simple model.
In cratering collisions, the total mass of ejecta me is much smal-ler than m1 and increases with the impact energy. When me is lar-ger than the half of m1, the disruption mode turns into catastrophic
disruption. By taking into account such a dependence of me on theimpact energy properly, we can describe outcomes of both crater-ing and catastrophic disruption with our model.
The disruption mode would also be dependent on the strengthof the colliding bodies. We introduce a normalized impact energy /defined by
/ðyÞ ¼ Eimp
m1QH
D
¼ v2
2QH
D
y1þ y
; ð8Þ
where
Eimp ¼12
m1m2
m1 þm2v2 ð9Þ
is the impact energy at the collision between m1 and m2 with thevelocity v and QH
D is the threshold value of the impact energy perunit target mass for catastrophic disruption. In our model, usingthe normalized impact energy, me is given by
me ¼/
1þ /m1: ð10Þ
At a cratering collision with small /, the total ejecta mass me is pro-portional to /. At a catastrophic collision with large /; me is almostequal to m1 (see Fig. 2). At / ¼ 1; me is equal to the mass of theremnant body and m1=2, which is consistent with the definitionof QH
D . It should be noted that we choose a smooth function forme/m1 to connect the limits of cratering and catastrophic. If thefunction is not necessary to be smooth, we can set another simplefunction as me/m1 = //2 for / < 2, me/m1 = 1 for / � 2. Althoughboth satisfy laboratory experiences and fluid dynamical simula-tions, there is a discrepancy by a factor of 2 between them in thelimit of /� 1 (cratering). Thus, there is still uncertainty about amodeling of the total ejecta mass. Since a smooth function ofme/m1 seems natural, we apply Eq. (10) for me/m1 in this paper.
The high-mass end of the power-law distribution, mL, is given inour model by
mL ¼�
1þ /me ¼
�/ð1þ /Þ2
m1; ð11Þ

0.01 1 100
1cratering catastrophic
mem1
mLm1
ε4
φ
0.5
Fig. 2. The total ejecta mass me and largest ejecta mass mL from the body m1 asfunctions of the scaled impact energy / in our model. A cratering collision occurs for/� 1 and a catastrophic collision occurs for /� 1.
738 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
where � is a non-dimensional parameter (see Fig. 2).1 For /� 1; mL
is proportional to / while mL is proportional to 1=/ for /� 1. Theenergy dependence for /� 1 are consistent with laboratory exper-iments (e.g., Paolicchi et al., 1996; Arakawa, 1999).
Using this model of the mass distribution of fragments, we canobtain the explicit form of the function f ðm;m1;m2Þ. We divide thefunction f ðm;m1;m2Þ into two components asf ðm;m1;m2Þ ¼ fejectðm;m1;m2Þ þ fremðm;m1;m2Þ, where feject andfrem are the mass fraction functions due to the ejecta and the rem-nant, respectively. Using the mass distribution described in Fig. 1with me; mL, and b, we have for feject and frem
m1fejectðm;m1;m2Þ ¼me ðm > mLÞ;
memmL
� �2�bðm 6 mLÞ;
8<: ð12Þ
and
m1fremðm;m1;m2Þ ¼m1 �me ðm P m1 �meÞ;0 ðm < m1 �meÞ:
�ð13Þ
This outcome model gives the function f ðm;m1;m2Þ (or the massdistribution of fragments created at a collision of bodies 1 and 2)for all impact energies or for all mass ratios m2=m1. It should be no-ticed that, in the case of m2=m1 > 1, the function f ðm;m1;m2Þ de-scribes the disruption of the small projectile at a collision with alarge target.
Our outcome model has three non-dimensional parameters, i.e.,b; �, and the ratio, v2=QH
D . By changing these parameters, weexamine the dependence of collision cascades on the outcomemodel. We adopt the following realistic parameter range in thepresent paper. According to the laboratory experiments of colli-sional disruption, the total mass of fragments is determined bythe high-mass end of the mass distribution while the total numberis governed by the very small fragments. Thus the power-law
1 � is related to b for the identical power-law mass distribution of ejecta evenaround mL (e.g., Williams and Wetherill, 1994; O’Brien and Greenberg, 2003).However, since the index b changes with ejecta mass (Takagi et al., 1984), there isuncertainty for the identical power-law distribution. Therefore, we treat � as anindependent parameter in this paper.
exponent should be in the range of 1 < b < 2. The parameter � isrelated to the high-mass end of the power-law distribution. Sincethe largest fragment in the power-law distribution should be lessmassive than the total mass of the distribution me, we set � < 1.Next we estimate the value of the ratio v2=QH
D . The collision veloc-ity v is approximately given by evK, where e is the orbital eccentric-ity of the colliding bodies and vK is the Keplarian velocity. Then wehave for v2=QH
D
v2
QH
D
� 2� 102 e0:1
� �2 a50 AU
� ��1 MH
M
� �QH
D
107 erg=g
!�1
; ð14Þ
where a is the semimajor axis of bodies, MH is a mass of the centralstar, and M is the solar mass. From Eq. (14), we can estimate theratio to be v2=QH
D ¼ 103—104 in the asteroid belt (2–3 AU) andv2=QH
D ¼ 102—103 in the Edgeworth-Kuiper belt (40–50 AU). Sincethe eccentricity would be dependent on the masses of planets per-turbing colliding bodies and the separations between the bodiesand the planets, the eccentricity can be much less than 0.1 in bothdebris disks and protoplanetary disks. In this paper, therefore, weset the range of v2=QH
D to be from 10�1 to 105.The collisional outcome model of Dohnanyi (1969) and Wil-
liams and Wetherill (1994) has a free parameter determining thetotal ejecta mass at a single cratering event. In our model, on theother hand, the total ejecta mass at a single collision event contin-uously decreases at the transition from catastrophic disruption tocratering (i.e., at / ¼ 1). If we include a large discontinuous de-crease in the total ejecta mass at the transition, it would signifi-cantly reduce the effect of cratering. In most of laboratoryexperiments and hydrodynamic numerical simulations on colli-sional disruptions, however, such a discontinuous decrease in thetotal ejecta mass is not observed (e.g., Housen et al., 1991; Takagiet al., 1984; Benz and Asphaug, 1999). In order to develop a simpleand realistic collision outcome model, we do not include such ajump in the total ejecta mass.
4. Mass flux
When the non-dimensional parameters v2=QH
D ; �, and b areindependent of the masses of the colliding bodies, m1 and m2,the function f ðm;m1;m2Þ given by Eqs. (10) and (11) depends ononly the mass ratios and it is independent of the absolute valueof the masses. Namely,
f ðm;m1;m2Þ ¼ fmm1
;m2
m1
� �: ð15Þ
For such a self-similar outcome model, a collision cascade has asingle power-law size distribution, as seen below (or see Tanakaet al., 1996). In Sections 4–6, we mainly examine this self-similarcase. We will show the ratio v2=QH
D is important in collision cas-cades compared with other two parameters. In realistic systems,v2=QH
D is dependent of the masses of the colliding bodies. In Sec-tion 7, we also examine the non-self-similar case.
Size distribution of the self-similar collision cascades is ob-tained as follows. Introducing the non-dimensional variablesx ¼ m=m1 and y ¼ m2=m1, and setting the mass distribution to bensðmÞ ¼ Am�a, we can rewrite Eq. (7) as
FðmÞ ¼ �A2XKh0 m113 �2a
Z 1
0dxZ 1
0dyy�a 1þ y
13
� �2x2a�14
3 f ðx; yÞ:
ð16Þ
For a steady state @FðmÞ=@m ¼ 0, we have (e.g., Dohnanyi, 1969; Ta-naka et al., 1996)
a ¼ 116: ð17Þ

10−1 100 101 102 103 104 105
101
102
103
104
105
v2/QD
*
|F| /
A2 h
0Ω
k
Fig. 4. The dependence of F (Eq. (18) with Eqs. (21) and (22)) on b and �. Here weset ðb; �Þ ¼ ð5=3; 0:2Þ (solid line), (1.8, 0.2) (dotted lines), (1.2, 0.2) (dashed lines), (5/3, 0.01) (gray solid line), (5/3, 0.5) (gray dotted lines).
H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746 739
We examine the (downward) mass flux of the self-similar colli-sion cascades with the power-law exponent of Eq. (17). Since thefunction f consists of two components, the mass flux FðmÞ is alsodivided into two corresponding components, the mass fluxes byejecta and by the eroded remnant, Feject and Frem. The downwardfluxes Feject and Frem are produced by ejecta from the body m1
and by the body m1 being eroded down to smaller mass, respec-tively. The flux is given by
FðmÞ ¼ FejectðmÞ þ FremðmÞ; ð18Þ
where
FejectðmÞ ¼ �A2Xkh0
Z 1
0dy
y�a 1þ y13
� �2/ðyÞ
1þ /ðyÞ
�Z kðyÞ
0x2a�14
3x
kðyÞ
� �2�b
dxþZ 1
kðyÞx2a�14
3 dx
( ); ð19Þ
FremðmÞ ¼ �A2Xkh0
Z 1
0dy
y�a 1þ y13
� �2
1þ /ðyÞ
Z 1
11þ/ðyÞ
x2a�143 dx ð20Þ
with kðyÞ ¼ �/ðyÞ=½1þ /ðyÞ�2. Furthermore, noting that a ¼ 11=6and integrating them over x, we obtain the expression of Feject andFrem as
FejectðmÞ ¼ �A2XKh0
Z 1
0dy
y�a 1þ y13
� �2/ðyÞ
1þ /ðyÞ
� � ln�/ðyÞ
½1þ /ðyÞ�2þ 1
2� b
" #; ð21Þ
FremðmÞ ¼ �A2XKh0
Z 1
0dy
y�a 1þ y13
� �2
1þ /ðyÞ lnð1þ /ðyÞÞ: ð22Þ
In Fig. 3, we show F; Feject, and Frem as a function of v2=QH
D . For allvalues of v2=QH
D ; Frem is smaller than Feject by the factor 10. Sincethe mass flux is determined by the component Feject of Eq. (21),we readily see that the mass flux F is proportional tov2=QH
D
� �ln v2=QH
D
� �in the case of v2=QH
D � 1 and that it is propor-
tional to v2=QH
D
� �a�1for v2=QH
D � 1. In Fig. 4, we show the depen-
10−1 100 101 102 103 104 105
100
101
102
103
104
105
106
v2/QD
*
|F |
/ A2 h
0Ω
k
|F eject| /
A2 h 0
Ω k
|F rem | /
A2 h 0
Ω k
Fig. 3. Feject (dashed lines), Frem (dotted lines), and FðmÞ ¼ Feject þ FremðmÞ (gray line)as functions of v2=QH
D for b ¼ 5=3 and � ¼ 0:2.
dence of F on the parameters � and b. The flux is insensitive to b and�. This means that the collision cascade is hardly influenced by thehigh-mass end mL of ejecta and the power-law exponent in the col-lisional outcome. The important factor is the total mass of ejecta me,which is governed by the ratio v2=QH
D .Next we compare the contribution of cratering in the flux with
that of catastrophic disruption. To do so, we introduce the partialmass flux F 0ðm; y0Þ, which is the contribution of collisions withthe mass ratio y ¼ m2=m1 less than y0. That is, the partial mass fluxF 0ðm; y0Þ is given by
F 0ðm; y0Þ ¼ F 0ejectðm; y0Þ þ F 0eroðm; y0Þ; ð23Þ
where
F 0ejectðm; y0Þ ¼ �A2Xkh0
Z y0
0dy
y�a 1þ y13
� �2/ðyÞ
1þ /ðyÞ
� � ln�/ðyÞ
½1þ /ðyÞ�2þ 1
2� b
" #; ð24Þ
F 0remðm; y0Þ ¼ �A2Xkh0
Z y0
0dy
y�a 1þ y13
� �2
1þ /ðyÞ lnð1þ /ðyÞÞ:
From this definition, we have F 0ðm;1Þ ¼ FðmÞ. In Fig. 5, we showthe y-dependence of the partial mass flux F 0ðm; yÞ. Cratering colli-sions and catastrophic collisions are distinguished by the value of/ which is determined by y. In Fig. 5, we used black lines for the re-gion of cratering collisions and gray lines for catastrophic collisions.According to the usual definition, the high-y case belongs to crater-ing collisions as well as the low-y case and we adopt it in Fig. 5. Forv2=QH
D ¼ 2 (or less), all collisions are cratering and, obviously, themass flux is determined by cratering collisions. In the high-velocitycases with v2=QH
D ¼ 200 or 20,000, catastrophic disruption occurs atcollisions with an intermediate mass ratio y. We see that the contri-bution of cratering collisions is about 10 times as large as that ofcatastrophic collisions even in these high-velocity cases. The impor-tance of cratering collisions are explained by their high-frequency.In Fig. 6, we plot dF 0ðm; yÞ=d ln y as a function of y. This is givenby the integrand of Eqs. (21) and (22) multiplied by y. This figurealso indicates the importance of cratering collisions. The function

10−10 10−8 10−6 10−4 10−2 100 102 104 1060
0.2
0.4
0.6
0.8
1
1.2
y = m2 / m1
F’(
m,y
) / F
(m)
catastrophic
cratering
Fig. 5. The partial mass flux F 0ðm; yÞ in Eq. (23) scaled by the total mass flux FðmÞ inEq. (18) with Eqs. (21) and (22) as a function of y for v2=QH
D = 20,000 (solid line), 200(dashed lines), and 2 (dotted lines).
10−10 10−8 10−6 10−4 10−2 100 102 104 106
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
y = m2 / m1
[dF
’(m
,y)
/ d ln
y] /
F(m
)
cratering
catastrophic
Fig. 6. ½dF 0ðm; y0Þ=d ln y0 �=FðmÞ as a function of y0 for v2=QH
D = 20,000 (solid line), 200(dashed lines), and 2 (dotted lines).
740 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
dF 0ðm; yÞ=d ln y has a peak in the region of cratering collisions and itis not negligible even at collisions with very small mass ratios ofy ¼ 10�8 because of its weak dependence on y ð/ y1=6Þ. We alsochecked that the importance of cratering collisions is almost inde-pendent of the parameters � and b.
In the case of v2=QH
D � 1, we can simplify the integrals in Eqs.(21) and (22) using the fact that the contribution of collisions withy� 1 is dominant in this case (see Fig. 5). Since v2=QH
D is large inthe asteroid belt or in debris disks, this approximation is valid.As a result, we obtain for v2=QH
D � 1 (see Appendix A for aderivation)
FðmÞ ¼ �A2Xkh0v2
2QH
D
!56
� ln �þ 12� b
� �s1 þ s2 þ s3
� �: ð25Þ
For a ¼ 11=6; s1 ’ 6:3; s2 ’ 38:1, and s3 ’ 5:6 (see Appendix A).The results on the mass flux obtained above are seen in Eq. (25),
too. The term s3 in Eq. (25) comes from the Frem while the termss1 and s2 correspond to Feject. Since s2 � s3; Feject is much larger thanFrem. Furthermore, we can understand the insensitivity of F on b and� from s2 � s1 in Eq. (25).
5. Mass depletion time
We consider the mass depletion in collision cascades. In a colli-sion cascade, large bodies near high-mass end have most of the to-tal mass. Their mass gradually decreases due to the downwardmass flux of the collision cascade. Although the mass flux producesa large amount of small fragments, these fragments would finallybe removed by the gas drag, the Poynting–Robertson, or the radia-tion pressure at low-mass end. Using the (negative) downwardmass flux in unit area, F, the evolution of the total surface densityis given by
dRdt¼ FðmÞ: ð26Þ
Note that the mass flux FðmÞ is independent of m in a wide massrange between the high- and low-mass ends of steady collision cas-cades. The constant mass flux FðmÞ is given by Eq. (18) with Eqs.(21) and (22). On the other hand, the total surface density is givenby
R ¼Z mmax
mmin
mnsdm ¼ m2�amax
2� aA: ð27Þ
Exactly speaking, the power-law mass distribution used above isnot valid near the high-mass end mmax. Thus Eq. (27) is an approx-imate equation. The validity of Eq. (27) will be checked in the nextsection with numerical simulations of collision cascades. From Eqs.(18), (21), (22), (26), and (27), we obtain a differential equation ofthe coefficient A. Solving it, we have for RðtÞ
RðtÞ ¼ R0
1þ t=sdep; ð28Þ
where R0 is the initial surface density and sdep is the so-called massdepletion time of the collision cascade given by
s�1dep ¼
136
XKR0
mmaxh0m
23max
�Z 1
0dy
y�a 1þ y13
� �2/ðyÞ
1þ /ðyÞ � ln�/ðyÞ
½1þ /ðyÞ�2
!þ 1
2� b
" #8><>:þZ 1
0dy
y�a 1þ y13
� �2
1þ /ðyÞ lnð1þ /ðyÞÞ
9>=>;: ð29Þ
Roughly speaking, R0=mmax is the surface number density of bodieswith �mmax and h0m2=3
max is their Pcol (see Eq. (3)). Hence the term of
XKðR0=mmaxÞh0m2=3max
h i�1in Eq. (29) is approximately equal to the
collisional time of bodies with �mmax (see Eq. (2)). Note that sdep
defined in Eq. (29) corresponds to the depletion time in the initialdepletion stage. To estimate the depletion time scale for stronglydepleted disks, we should replace R0 by RðtÞ (i.e., the depleted sur-face density) in Eq. (29).
As well as the mass flux, the mass depletion time has only aweak dependence on the parameters � and b and it is almost gov-erned by the ratio v2=QH
D (see Fig. 4). Thus the mass depletion timehardly depends on the exponent b and the high-mass end mL of themass distribution in the outcome model. As seen in the mass flux,furthermore, the mass depletion time is almost determined by cra-tering collisions and the contribution of catastrophic collisions isminor.

10−1 100 101 102 103 104 105
103
104
105
106
107
108
v2/QD
*
τ dep
[yr
]
Fig. 7. The mass depletion time sdep due to collision cascades as a function of v2=QH
D
for Mtotal ¼ M; a ¼ 2:5 AU; Da ¼ 1 AU; mmax ¼ 1:3� 1022 g; q ¼ 3 g cm�3. Solid,dashed, and dotted lines indicate sdep in Eq. (30) for high-velocities, that in Eq.(29), that derived by Wyatt et al. (2007), respectively.
103 104 105 106 107 1080.001
0.01
0.1
1
time [yr]
Σ(t)
/ Σ 0
v2/Q* = 2 X 104
200
2
Fig. 8. Total mass of bodies as a function of time. The solid lines indicate the resultson the numerical integration with v2=QH
D ¼ 2—2� 104 and the dot gray linesindicate Eq. (28).
104 106 10810−3
10−2
10−1
100
time [yr]
Σ(t)
/ Σ 0 v 2
/QD * =
200
v 2/Q
D * = 2 X 10 4
Fig. 9. Total mass evolution for ðb; �Þ ¼ ð5=3; 0:2Þ (solid line), (5/3, 0.01) (gray solidline), (5/3, 0.5) (gray dotted lines), (1.2, 0.2) (dashed lines), and (1.8, 0.2) (dottedlines) for v2=QH
D ¼ 200 and 2� 104.
H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746 741
Eq. (28) has the same form as previous studies (e.g., Dominikand Decin, 2003; Wyatt et al., 2007) but there is some differencein the mass depletion time. In Fig. 7, we plot the mass depletiontime as a function of the ratio v2=QH
D . For the comparison we alsoplot the depletion time obtained by Wyatt et al. (2007). They ne-glected the effect of cratering collisions in their derivation of thedepletion time. Our mass depletion time is shorter than that byWyatt et al. about by the factors 5–7 even for large v2=QH
D . This dif-ference is explained by the effect of cratering collisions.
For the ratio v2=QH
D � 1, we can obtain a simple expression ofthe mass depletion time in the same way as the mass flux of Eq.(25) (see also Appendix A). Thus, we obtain
sdep ¼36 m
13max
R0h0XK
v2
2QH
D
!�56
� ln �þ 12� b
� �s1 þ s2 þ s3
� ��1
: ð30Þ
In Fig. 7, we also plot Eq. (30). For large v2=QH
D , Eq. (30) agrees wellwith the exact value obtained from Eq. (29). We find the insensi-tiveness of the depletion time on the parameters b and � in Eq.(30), too. Note that sdep becomes longer within a factor of 2 dueto uncertainty of fragmentation model as we will discuss inSection 7.
6. Numerical calculation
We also calculate the mass evolution of bodies due to collisionalfragmentation by numerical simulations to check the analyticalformula of the mass depletion time of Eq. (29) (or the validity ofEq. (27)). In the numerical simulation, using a set of discrete massbatches having the surface number density of bodies, we calculatethe mass flux in Eq. (7) by summing over all mass bins and inte-grate Eq. (1) with the mass flux over time through the fourth orderof Runge-Kutta method. We set the mass ratio between adjacentmass batches to be 2. We consider that the bodies with mass rang-ing from 1:0� 10�5 g to 1:3� 1022 g are distributed from 2 AU to3 AU and that their densities are 3 g cm�3. Their initial total massis the earth mass M and hence the surface density R0 ¼1:1 g cm�2. The initial mass distribution is the power-law withthe index of -11/6.
Fig. 8 shows mass depletion in collision cascades obtained withour numerical simulations for various values of v2=QH
D . The surfacedensity is constant for t � sdep and inversely proportional to t fort � sdep. The formula Eq. (28) with sdep of Eq. (29) is in excellentagreement with results from the numerical calculations. It shouldbe note that, for v2=QH
D ¼ 2� 104, the numerical result slightlydeviates from the analytical formula. This is caused by a wavystructure in the mass distribution caused by setting low-massend in the numerical calculations (e.g., Krivov et al., 2006; Thébaultand Augereau, 2007), which is not taken into account in the deriva-tion of the analytical formula.
In Fig. 9, we show similar numerical results but for various setof ðb; �Þ. We find that the mass depletion is insensitive to b and �.Thus the mass depletion in collision cascades practically dependson only the total mass of ejecta me in the outcome model, as shownin the previous sections.

10−10 10−8 10−6 10−4 10−2 100 102 104 1060
0.2
0.4
0.6
0.8
1
y
F’(
m,y
) / F
(m)
Fig. 10. Same as Fig. 5, but for non-self-similar cases. In the strength regime,p ¼ �0:12 (dotted lines) and, in the gravity regime, p ¼ 0:45 (dashed lines) whilep ¼ 0 in the self-similar case (solid line). Here the power-law index a of massdistribution of bodies is given by Eq. (32).
105 106 107 108 10910−4
10−3
10−2
10−1
100
Time [yr]
Σ (t
) / Σ
0
no crateringwith cratering
Fig. 11. Comparison of mass evolution with cratering (solid line) and that without
742 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
7. Other fragmentation models
In Sections 4–6, we assumed that v2=QH
D is independent ofmasses of colliding bodies in the collisional model and consideronly the self-similar case. In general, however, the threshold valuefor catastrophic disruption, QH
D , is dependent on the mass of thetarget (e.g. Holsapple, 1993; Benz and Asphaug, 1999) while colli-sional velocities v of small bodies have a very weak function ofmass (e.g., Wetherill and Stewart, 1993; Inaba et al., 2003). Accord-ing to Benz and Asphaug (1999), QH
D / m0:4�0:51 in the gravity regime
and QH
D / m�0:11 �m�0:16
1 in the strength regime. Here we examinenon-self-similar cases, assuming v2=QH
D / m�p1 in Eq. (8). We also
assume that the ratio v2=QH
D is much larger than unity in wholemass range of collision cascades. From the estimation of Eq. (14),we can say that this assumption is valid for a wide parameter rangeof collision cascades. Under the assumption of v2=QH
D � 1, we canneglect the contribution of collisions with y J 1 and, fortunately,have an expression of the mass flux similar to Eq. (25), as describedin Appendix A. That is, we obtain (see Appendix A for detail)
FðmÞ ¼ �A2Xkh0m113�2a�pða�1Þ vðmÞ2
2QH
D ðmÞ
!a�1
� � ln �þ 12� b
� �s1ðaÞ þ s2ðaÞ þ s3ðaÞ
� �: ð31Þ
Since v2=QH
D / m�p, we have 11=3� 2a� pða� 1Þ ¼ 0 for a steadystate (i.e., @FðmÞ=@m ¼ 0). Therefore, a is given by
a ¼ 11þ 3p6þ 3p
: ð32Þ
O’Brien and Greenberg (2003) derived the same power-law expo-nent as Eq. (32), though they considered only the catastrophic col-lisions. In the same way, using Eqs. (31) and (32), we have
sdep ¼m
13max
ð2� aÞ2R0h0XK
vðmmaxÞ2
2QH
D ðmmaxÞ
!�aþ1
� � ln �þ 12� b
� �s1ðaÞ þ s2ðaÞ þ s3ðaÞ
� ��1
: ð33Þ
Even in this non-self-similar case, the mass flux and the mass deple-tion time are not sensitive to the parameters � and b in this non-self-similar case.
In the above derivation of Eq. (31), we used the power-law massdistribution of fragments in the outcome model described in Sec-tion 3. In Appendix B, we also derive a more general expressionof FðmÞ for arbitrary mass distribution of fragments, assuming thatcollisions with y� 1 are dominant. The mass flux is written in theform (see Appendix B for the detail derivation)
FðmÞ ¼ �A2XKh0m113�2a�pða�1Þ vðmÞ2
2QH
D ðmÞ
!a�1 Z 1
0d//�a
� fMeð/Þ ln Mmð/Þ � ½1�Með/Þ� ln½1�Með/Þ�g; ð34Þ
where Með/Þ is the total ejecta mass normalized by m1 andm1Mmð/Þ is the mean fragment mass in the ejecta defined by Eq.(B4).2 The power-law exponent a of steady collision cascades is gi-ven by Eq. (32) in this general case, too. The detailed informationof the mass distribution function is included only through the (nor-malized) mean fragment mass Mmð/Þ. However, the dependence ofthe flux on Mmð/Þ is not sensitive because of its logarithmic depen-dence. Hence we again see in this general case that the mass flux is
2 When we adopt the outcome model in Section 3, the mean fragment mass m1Mm
is obtained as mLe�1=ð2�bÞ , and Eq. (34) reduces to Eq. (31).
mainly determined by the total ejecta mass Með/Þ in the collisionaloutcome.
To see the contribution of cratering collisions in the mass flux ofEq. (31), we define F 0ðm; yÞ in the same way as Eqs. (23) and (24)but using Eq. (31) and plot a similar figure to Fig. 5 in Fig. 10 forthis non-self-similar collision cascades. We consider that v2=QH
D
is proportional to m�p1 and that 20,000 at the mass m corresponding
to the mass flux F 0ðm; yÞ seen in Fig. 10. In the gravity regime withp ¼ 0:45, the catastrophic collisions are more effective than theself-similar case. However, the cratering is still dominant com-pared with the catastrophic disruption in the gravity regime, too.
In addition, we also performed another numerical simulationfor a more realistic QH
D to confirm the importance of the cratering.
cratering (dotted lines; neglecting collisions with / < 1) through numericalsimulations. We chose QH
D ¼ 3:5�107ðr1=1 cmÞ�0:38 þ 0:3 ðq=1 g cm�3Þðr1=1 cmÞ1:36
in erg/g for v ¼ 3 km=s (Benz and Asphaug, 1999). The gray line indicates Eq. (28)with Eq. (33).

H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746 743
According to Benz and Asphaug (1999), we set QH
D ¼ 3:5�107ðr1=1 cmÞ�0:38 þ 0:3ðq=1 g cm�3Þðr1=1 cmÞ1:36 in erg=g. We con-sider v ¼ 3km=s and that the other conditions are same as numer-ical simulations in Section 6. To see the effect of the crateringcollisions, we perform two kinds of simulation. In the first case,we include both cratering and catastrophic collisions and, in sec-ond case, we take into account only the catastrophic collisions. InFig. 11, we show the numerical results on the evolution of the totalsurface density of the collision cascade. The depletion time withcratering is 4–5 times shorter than that without cratering. Themass flux controls at high-mass end of the collision cascade andQH
DðmmaxÞ is held by the gravity regime. Thus, this result is consis-tent with the analytical prediction for the gravity regime in Fig. 10.For p = �0.12-0 (the strength regime at the high-mass end), thedepletion time is shortened by a factor 10–20 by cratering (seeFig. 10). Furthermore, Fig. 11 also shows that Eq. (33) is valid evenin the case of the realistic QH
D .One may consider that the results on the effect of the cratering
collisions are based on the collisional outcome model we set. In thefragmentation model of Section 3, we artificially set me as Eqs. (10)and the parameter / is given by Eq. (8). Thus, for cratering colli-sions with y� 1 and /� 1; me is proportional to y (or the projec-tile mass) in Section 3 (and in the above general case, too). Tocharge this linear dependence of me on the projectile mass at cra-tering collisions, we redefine the parameter / by / ¼ v2=2QH
D
� �yn=
ð1þ ynÞ. Using this model, we calculate F 0ðm; yÞ and plot the resultin Fig. 12. The contribution of cratering collisions tend to decreasewith n, because a collision with a small mass ratio yields the rela-tively small me for n > 1. This tendency is independent of � and b.For large n > 1:5, the catastrophic collisions would be more impor-tant than the cratering. Nevertheless, according to the scaling lawfor cratering, the total ejecta mass (or the ejecta volume) is propor-tional to the mass of the projectile not only in the strength regimebut also the gravity regime (see Eq. (21) and Table 2 of Holsapple(1993)). Laboratory experiments and hydrodynamic simulationson collisional dispersions also showed that the slope is close tounity (e.g., Housen et al., 1991; Benz and Asphaug, 1999). Thuswe can say that the assumption n ’ 1 is reasonable and that thecase with n > 1:5 is not realistic. As a result, it is concluded thatthe cratering collisions make a dominate contribution to collisioncascades in realistic outcome model.
10−10 10−8 10−6 10−4 10−2 100 102 104 1060
0.2
0.4
0.6
0.8
1
y
F’(
m,y
) / F
(m)
Fig. 12. Same as 5, but for n ¼ 1:5 (dotted lines), 1 (solid line), and 0.9 (dashedlines). Here / ¼ v2=2QH
D
� �yn=ð1þ ynÞ and v2=QH
D ¼ 2� 104.
Williams and Wetherill (1994) analytically compared the effectof cratering with catastrophic disruption. In their estimation, theratio of the mass loss by cratering to that by catastrophic disrup-tion is approximately given by 5C=C0 in the high-velocity regime,where C is the ratio of the total ejecta mass at a single crateringto the projectile mass mp and C0mp is the mass of the largest targetthat can be completely destroyed by a collision with the projectile.In the nominal case in their paper, the ratio C=C0 is set to be 0.05,which makes cratering ineffective. This value seems too small, asexplained below. In their model, near the transition from crateringto catastrophic, the ratio of the total ejecta mass to the target massis given by C=C0 for cratering while the ratio is equal to unity forcatastrophic. If the total ejecta mass is continuous at the transitionfrom cratering to catastrophic, the ratio C=C0 should be unity. Mostof the laboratory experiments and the hydrodynamic numericalsimulations on collisional disruptions showed that the total ejectamass continuously decreases at the transition from catastrophic tocratering (e.g., Housen et al., 1991; Takagi et al., 1984; Benz andAsphaug, 1999). Hence, we should set the ratio C=C0 to be unityrather than 0.05 in a realistic collisional outcome model. If the ratioC=C0 is set to be unity, cratering is more effective than catastrophicdisruption in the estimation of Williams and Wetherill (1994), too.This is consistent with our result. It should be noted that laboratoryexperiments and hydrodynamic numerical simulations on colli-sional disruptions are not enough. New experiments and/or simu-lations may observe a jump in the ejecta mass near the transition.If such cases are found a lot, our result should be reconsidered. Inaddition, the contribution of cratering depends on our simple frag-mentation model described in Section 3. When we apply otherconsistent fragmentation models with the laboratory experiencesand fluid dynamical simulations on collisional dispersions, the con-tribution factor can change within a factor of 2.
8. Implication to planet formation
Debris disks are found around main-sequence stars. In the disk,In debris disks, the removable time of small dust by the radiationpressure is much shorter than the age of the central star. Therefore,the debris disk is fed by collisional fragments of planetesimals. Thebrightness of a debris disk is proportional to the total mass of theplanetesimals. Therefore, the mass depletion time gives the evolu-tion time of the brightness. Cratering collisions are important forthe collisional evolution in debris disks. We derived the massdepletion time in Eq. (33), which is about four times shorter thanthat without cratering collisions when QH
D of largest bodies (plane-tesimals) is proportional to m0:4 �m0:5 in the gravitational regime.Assuming the critical energy QH
D ¼ Q0ðq=3 g cm�3Þ0:55ðm=1021 gÞ0:45
erg=g of planetesimals (Benz and Asphaug, 1999) and v ¼ evK, weestimated the depletion time from Eq. (33) as
sdep ¼ 4:0� 108 Q 0
9:5� 108 erg=g
!0:68m
1021 g
!0:64 a
50 AU
!0:18
�
Da=a0:1
! e
0:1
!�1:4 q
3 g cm�3
!0:89 Mtot
M
!�1
yr; ð35Þ
where Mtot is the total mass of bodies in the ring-like debris diskswith the width Da at the distance a from the central star, andM ¼ 5:97� 1027 g is the Earth mass. This results is important foranalysis of debris disks because the depletion time is related tothe masses and the velocities of planetesimals. We should recallthat sdep of Eqs. (33) and (35) is the depletion time for the initialsurface density. To estimate the evolution time of the depleteddisks, we need to replace RðtÞ or MtotðtÞ in Eqs. (33) and (35).
Planets are formed by collisional accretion of planetesimals.Planetary embryos are formed through a runaway accretion of

744 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
planetesimals. The embryos do not collide each other in the oligar-chic stage. In this stage, their growth slows down because of theenhancement of random velocities of planetesimals due to the per-turbation by embryos themselves. The growth time of the embryowith mass M and semimajor axis a is given by (e.g., Tanaka and Ida,1999; Kokubo and Ida, 2002)
sgrow ¼ 2:9� 106 m
1021 g
!1=9 a
1 AU
!1=6qgas
10�9 g cm�3
!�1=3
� q3 g cm�3
� �5=9 M
1026 g
!1=3R
2:5 g cm�2
� ��1
yr; ð36Þ
where m is the planetesimal mass, R is the surface density of the so-lid materials, and qgas is the nebula density. On the other hand, totalmass of planetesimals depletes by mutual collisions between plane-tesimals if their collisional energies per unit mass exceed the criticalenergy QH
D . We can apply Eq. (33) to the depletion time of the plane-tesimals. Inserting the relative velocity v determined by the equilib-rium between the viscus stirring by embryos and the gas drag(Tanaka and Ida, 1999) and the critical energy QH
D ¼ Q0ðq=3 g cm�3Þ0:55ðm=1021 gÞ0:45 erg=g of planetesimals (Benz and Asph-aug, 1999), we have
sdep ¼ 8:9� 106 Q0
9:5� 108 erg=g
!0:69 a
5:2 AU
!2:4qgas
10�9 g cm�3
!0:23
� m
1021 g
!0:57M
1026 g
!�0:46q
3 g cm�3
� �0:89 R2:5 g cm�2
� ��1
yr:
ð37Þ
In Fig. 13, we plot the growth time and the depletion time as func-tions of the embryo mass. When the planetary embryos are smallenough, the growth time is much shorter than the depletion time.Then, embryos can grow more prior to the depletion. When themass of embryos attains to an critical mass at which sgrow ’ sdep,the depletion of planetesimals would stop the growth of embryos(Inaba et al., 2003; Kenyon and Bromley, 2008). The critical massof embryos at which sgrow ¼ sdep is given by
1024 1026 1028
106
107
108
M [g]
times
cale
[yr
]
τgrow
τdep
Fig. 13. The embryo growth time sgrow of Eq. (36) and the planetesimal depletiontime sdep of Eq. (37) as a function of the embryo mass M.
M ¼ 6:7� 10�2 Q0
9:5� 108 erg=g
!0:87m
1021 g
!0:58
�
a5:2 AU
!2:8qgas
10�9 g cm�3
!0:71q
3 g cm�3
� �0:42
M: ð38Þ
Eq. (38) shows that the critical mass of planetary embryos is com-parable to the Mars mass. The semimajor axes of embryos are chan-ged by migration (e.g., Ida and Lin, 2004, 2008; Nagasawa et al.,2007; Gomes et al., 2005) and the embryos further grow throughcollisions with other embryos for the long time orbital instabilityafter gas depletion of protoplanetary disk (Chambers et al., 1996;Iwasaki and Ohtsuki, 2006). The critical mass in Eq. (38) is too smallfor embryos to start the gas capture for giant planet formation priorto the gas depletion (e.g., Ikoma et al., 2001). Note that this criticalmass of embryos is independent of the surface density of planetes-imals since both timescale is inversely proportional to R. To in-crease the critical mass of embryos to the earth mass, we wouldneed large planetesimals with �1023 g. Furthermore, the enhance-ment in collisional cross sections of embryos by their envelopemakes their growth time shorter (e.g., Inaba and Ikoma, 2003; Inabaet al., 2003) and would also increase their critical mass. If QH
D is lar-ger than that we adopt from Benz and Asphaug (1999) for largeplanetesimals, it would also assist the growth of embryos. However,this estimate would be too simple because both the growth timeand the depletion time become longer with the surface densitydecreasing and because the growth time may be shorter by theplanetesimals and fragments having mass spectrum (Kenyon andBromley, 2009). More detailed investigation on disruption anddepletion of planetesimals are needed to clarify the planet forma-tion process.
9. Summary
1. We construct a simple fragmentation model described in Sec-tion 3, which is reasonably consistent with laboratory experi-ments, scaling laws, and hydrodynamical simulations oncollisional dispersions. Ignoring coalescence of colliding bodiesfor high collisional velocities, the fragmentation model isapplied to the mass flux which Tanaka et al. (1996) developedfor analysis of self similar collision cascades (QH
D and v2 is inde-pendent of mass). That clarifies the fragmentation modeldependence. Furthermore, we expand the analysis to adapt inthe case of v2=QH
D having a power-law dependence on mass.2. Cratering collisions are dominant to the mass depletion (see
Figs. 5, 10, and 12), because cratering collisions occur more fre-quently than catastrophic ones. This result does not depend onthe outcome model of collisional disruption as long as we userealistic model (see Section 7). The depletion time dependingon v2=QH
D / m�p at high-mass end is reduced by a factor 4–5for p = 0.45 (gravity regime) and 10–20 for p ¼ �0:12� 0(strength regime) by taking into account the crateringcollisions, where we assume v2=QH
D / m�p. Although Williamsand Wetherill (1994) obtained a conclusion that cratering wasnegligible under the assumption that the total ejecta massproduced by one dispersion has a discontinuous transitionbetween cratering and catastrophic disruption, our result isconsistent with their analysis for a continuous dependence attransition from cratering to catastrophic as seen in collisionalexperiments (see Section 7).
3. We analytically derived the mass flux and the depletion time(Eqs. (31) and (33)) due to collisions for large v2=QH
D , usingthe outcome model in Section 3. The assumption of largev2=QH
D is valid for a wide parameter range of collision cascades(see Eq. (14)).

1.65 1.7 1.75 1.8 1.85100
101
102
α
s2
s1 s3
Fig. 14. s1ðaÞ; s2ðaÞ, and s3ðaÞ in Eqs. (A3)–(A5).
H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746 745
4. Eq. (33) explicitly show the depletion time of collision cascadesis mainly determined by the total ejecta mass of the outcomemodel (or the ratio v2=QH
D at the high-mass end) and insensitiveto the detail of the mass distribution of fragments in the out-come model (i.e., the power-law exponent and the mass ofthe largest fragments) as long as we consider realistic models.This result is confirmed by the more general expression of Eq.(34).
5. We confirm the power-law index (Eq. (32)) of mass distributionfor v2=QH
D / m�p derived by O’Brien and Greenberg (2003) tak-ing into account only catastrophic collisions and show the indexremains valid for any fragment model including cratering in thehigh impact velocity regime (see Section 7 and Appendix B).
6. We applied the obtained expression of the depletion time to theplanet formation process. We find that when the planetaryembryos grow to a critical mass, their growth is suppressedby the depressed by the depletion of planetesimals due to col-lisional disruption. The critical mass given by Eq. (38) is compa-rable to the Mars mass (the Earth mass) for planetesimals with1021 g ð1023 gÞ. This result suggests that the collisional disrup-tion of planetesimals may be a crucial factor in the gas giant for-mation via core accretion.
Acknowledgments
We are grateful to K. Wada, H. Genda, A. Krivov, and T. Löhne forhelpful comments and discussions. We also thank D. O’Brien and S.Kenyon for critical comments which helped us improve the origi-nal manuscript.
Appendix A. Integration in F and sdep for large v2=Q H
D
The mass flux of Eqs. (21) and (22) and the depletion time of Eq.(29) include integrals
Z 1
0dy
y�a 1þ y13
� �2/ðyÞ
1þ /ðyÞ � ln�/ðyÞ
½1þ /ðyÞ�2þ 1
2� b
" #
þZ 1
0dy
y�a 1þ y13
� �2
1þ /ðyÞ lnð1þ /ðyÞÞ: ðA1Þ
In the case of v2=QH
D � 1, these integrals can be simplified, as ex-plained below. The mass depletion is mostly governed by crateringcollisions and the catastrophic collisions have a (minor) contribu-tion only for /ðyÞ � 1 (see Fig. 5). Hence, we can assume thaty� 1 in the integrals for large v2=QH
D . Replacing ð1þ y1=3Þ2 and1þ y by 1, and transforming the variable of the integration from yto /, we can rewrite Eq. (A1) as
v2
2QH
D
!a�1 Z 1
0d/
/1�a
1þ /� ln
�/ð1þ /Þ2
þ 12� b
" #þ /�a
1þ /lnð1þ /Þ
( )
¼ v2
2QH
D
!a�1
� ln �þ 12� b
� �s1ðaÞ þ s2ðaÞ þ s3ðaÞ
� �; ðA2Þ
where
s1ðaÞ ¼Z 1
0d/
/1�a
1þ /; ðA3Þ
s2ðaÞ ¼ �Z 1
0d/
/1�a
1þ /ln
/
ð1þ /Þ2; ðA4Þ
s3ðaÞ ¼ �Z 1
0d/
/�a
1þ /lnð1þ /Þ: ðA5Þ
In Fig. 14, we show the values of the integrals s1ðaÞ; s2ðaÞ, and s3ðaÞ.In self-similar collision cascade (i.e., a ¼ 11=6), s1 ’ 6:3; s2 ’ 38:1,and s3 ’ 5:6.
In the derivation of Eqs. (21) and (22) (or (29)), we assumed aconstant v2=QH
D and the self-similarity for the function f (Eq.(15)) and a ¼ 11=6. Hence this derivation seems to be invalid inthe case of non-constant v2=QH
D . However, when the ratio v2=QH
D
is proportional to a power of the target mass, m1, we can have anexpression of the mass flux (the depletion time) similar to Eq.(25) (Eq. (30)) as long as v2=QH
D � 1, as shown below. As a resultwe will obtain Eq. (31).
We assume that v2=QH
D / m�p in Eq. (8). Also assuming thaty� 1, we have / ¼ yvðm1Þ2=2QH
Dðm1Þ. In this case / is dependenton m1 (or x) as well as y. In the derivation of Eqs. (19) and (20) from(16), we changed the order of integration and integrated with re-spect to x first. Here, we cannot do that because of the x-depen-dence of /. Nevertheless, if we transform the variable of theintegrations from y to / in Eq. (16), then, we can change the orderof integration between / and x. In the integrals with respect to x ofEqs. (19) and (20), the factors x2a�14=3 are all replaced byx2a�14=3þpða�1Þ at the transformation of variable. Noting that Eq.(32) should be used instead of a ¼ 11=6 in this case, we have thesame integrations with respect to x as in the derivation of Eqs.(21) and (22). As a result, we obtain the same result as Eq. (A2).It should be noticed that the constant v2=QH
D in Eq. (A2) is replacedby vðmÞ2=QH
D ðmÞ. Finally, leaving the m-dependence of FðmÞ, weobtain Eq. (31).
Appendix B. More general formula for the mass flux
In Appendix A, we obtained a simple formula for the mass flux,assuming that the contribution of the collisions with y� 1 is dom-inant in the case of v2=QH
D � 1, and using the outcome model inSection 3. Here, we derive a more general formula for the massflux, adopting the similar assumption but using a more generaloutcome model than in Section 3.
In the more general case, we use the normalized impact energy/ðyÞ as well as in Section 3 but we only assume for the mass distri-bution of the ejecta at each collision
fejectðm;m1;m2Þ ¼ fejectðx;/ðyÞÞ ðB1Þ

746 H. Kobayashi, H. Tanaka / Icarus 206 (2010) 735–746
instead of Eq. (12), where x ¼ m=m1. That is, we seek a generalexpression of FðmÞ for arbitrary mass distribution function of frag-ments with is parameterized by /.
From Eq. (B1), the total ejecta mass með/Þ is equal tom1fejectð1;/ðyÞÞ and, using this me; f rem is given by Eq. (13) in thiscase, too. Assuming y� 1, we put / ¼ yv2=2QH
D and also assumev2=QH
D / m�p1 as in Appendix A. Thus / / m�p
1 , too. Under theseassumptions, transforming the variable from y to / in Eq. (16)and changing the order of integration, we obtain
FðmÞ ¼ �A2XKh0m113�2a�pða�1Þ vðmÞ2
2Q DðmÞH
!a�1 Z 1
0d//�a
�(Z 1
0dxx2a�14
3þpða�1Þfejectðx;/Þ
þ ½1� fejectð1;/Þ�Z 1
1�fejectð1;/Þdxx2a�14
3 þpða�1Þ
): ðB2Þ
In this expression, FðmÞ is proportional to m11=3�2a�pða�1Þ as well as inAppendix A. Thus we again obtain Eq. (32) for steady state collisioncascades. Using this and integrating by parts with respect to x, wefinally obtain a general expression of the mass flux in steady colli-sion cascades as
FðmÞ ¼ �A2XKh0m113�2a�pða�1Þ vðmÞ2
2QH
D ðmÞ
!a�1 Z 1
0d//�a
� Með/Þ ln Mmð/Þ � ½1�Með/Þ� ln½1�Með/Þ�f g; ðB3Þ
where Með/Þ ¼ fejectð1;/ðyÞÞ is the total ejecta mass normalized bym1 and m1Mmð/Þ is the mean fragment mass in the ejecta definedby
ln Mmð/Þ ¼1
Með/Þ
Z 1
0dx ln x
dfejectðx;/Þdx
: ðB4Þ
Note that dfejectðx;/ðyÞÞ=dx describes the differential mass distribu-tion of fragments in the ejecta. It should be also noticed thatln Mmð/Þ and ln½1�Með/Þ� are both negative since Mmð/Þ < 1 and½1�Með/Þ� < 1. This expression is valid for arbitrary mass distribu-tion of fragments with is parameterized by /. When we adopt theoutcome model in Section 3, the mean fragment mass m1 Mm is ob-tained as mLe�1=ð2�bÞ, and Eq. (B3) is reduced to Eq. (31).
References
Arakawa, M., 1999. Collisional disruption of ice by high-velocity impact. Icarus 142,34–45.
Benz, W., Asphaug, E., 1999. Catastrophic disruptions revisited. Icarus 142, 5–20.Bottke, W.F., Durda, D.D., Nesvorny, D., Jedicke, R., Morbidelli, A., Vokrouhlicky, D.,
Levison, H.F., 2005. Linking the collisional history of the main asteroid belt to itsdynamical excitation and depletion. Icarus 179, 63–94.
Chambers, J.E., Wetherill, G.W., Boss, A.P., 1996. The stability of multi-planetsystems. Icarus 119, 261–268.
Dohnanyi, J.S., 1969. Collisional model of asteroids and their debris. J. Geophys. Res.74, 2531–2554.
Dominik, C., Decin, G., 2003. Age dependence of the vega phenomenon: Theory.Astrophys. J. 598, 626–635.
Gomes, R., Levison, H.F., Tsiganis, K., Morbidelli, A., 2005. Origin of the cataclysmicLate Heavy Bombardment period of the terrestrial planets. Nature 435, 466–469.
Greenzweig, Y., Lissauer, J.J., 1992. Accretion rates of protoplanets. II. Gaussiandistributions of planetesimal velocities. Icarus 100, 440–463.
Holsapple, K.A., 1993. The scaling of impact processes in planetary sciences. Ann.Rev. Earth Planet. Sci. 21, 333–373.
Housen, K.R., Schmidt, R.M., Holsapple, K.A., 1991. Laboratory simulations of largescale fragmentation events. lcarus 94, 180–190.
Ida, S., Lin, D.N.C., 2008. Toward a deterministic model of planetary formation. IV.Effects of type I migration. Astrophys. J. 673, 487–501.
Ida, S., Lin, D.N.C., 2004. Toward a deterministic model of planetary formation. I. Adesert in the mass and semimajor axis distributions of extrasolar planets.Astrophys. J. 604, 388–413.
Ikoma, M., Emori, H., Nakazawa, K., 2001. Formation of giant planet in densenebulae: Critical core mass revisited. Astrophys. J. 553, 999–1005.
Inaba, S., Tanaka, H., Nakazawa, K., Wetherill, G.W., Kokubo, E., 2001. High-accuracystatistical simulation of planetary accretion: II. Comparison with N-bodysimulation. Icarus 149, 235–250.
Inaba, S., Ikoma, M., 2003. Enhanced collisional growth of a protoplanet that has anatmosphere. Astron. Astrophys. 410, 711–723.
Inaba, S., Wetherill, G.W., Ikoma, M., 2003. Formation of gas giant planets:Core accretion models with fragmentation and planetary envelope. Icarus166, 46–62.
Iwasaki, K., Ohtsuki, K., 2006. Orbital stability of protoplanetary systems in nebulargas and implications for terrestrial planet formation. Astron. J. 131, 3093–3099.
Kokubo, E., Ida, S., 2002. Formation of protoplanetary systems and diversity ofplanetary systems. Astrophys. J. 581, 666–680.
Kenyon, S.J., Bromley, B.C., 2002. Collisional cascades in planetesimal disks. I. Stellarflybys. Astron. J. 123, 1757–1775.
Kenyon, S.J., Bromley, B.C., 2004. Collisional cascades in planetesimal disks. II.Embedded planets. Astron. J. 127, 513–530.
Kenyon, S.J., Bromley, B.C., 2008. Variations on debris disks: Icy planet formation at30–150 AU for 1–3 M main-sequence stars. Astrophys. J. Suppl. Ser. 179, 451–483.
Kenyon, S.J., Bromley, B.C., 2009. Rapid formation of icy super-Earths and the coresof gas giant planets. Astrophys. J. 690, L140–L143.
Kenyon, S.J., Bromley, B.C., O’Brien, D.P., Davis, D.R., 2008. Formation and collisionalevolution of Kuiper belt objects. In: Barucci, M.A., Boehnhardt, H., Cruikshank,D.P., Morbidelli, A. (Eds.), The Solar System beyond Neptune. University ofArizona Press, Tucson, pp. 293–313.
Kenyon, S.J., Luu, J.X., 1999. Accretion in the early outer Solar System. Astrophys. J.526, 465–470.
Krivov, A.V., Löhne, T., Sremcevic, M., 2006. Dust distributions in debris disks:Effects of gravity, radiation pressure and collisions. Astron. Astrophys. 455,509–519.
Krivov, A.V., Sremcevic, M., Spahn, F., 2005. Evolution of a Keplerian disk of collidingand fragmenting particles: A kinetic model with application to the EdgeworthKuiper belt. Icarus 174, 105–134.
Krivov, A.V., Müller, S., Löhne, T., Mutschke, H., 2008. Collisional and thermalemission models of debris disks: Toward planetesimal population properties.Astrophys. J. 687, 608–622.
Löhne, T., Krivov, A.V., Rodmann, J., 2008. Long-term collisional evolution of debrisdisks. Astrophys. J. 673, 1123–1137.
Nagasawa, M., Thommes, E.W., Kenyon, S.J., Bromley, B.C., Lin, D.N.C., 2007. Thediverse origins of terrestrial–planet systems. Protostars Planet. V, 639–654.
O’Brien, D.P.O., Greenberg, R., 2003. Steady-state size distributions for collisionalpopulations: Analytical solution with size-dependent strength. Icarus 164, 334–345.
Paolicchi, P., Verlicchi, A., Cellino, A., 1996. An improved semi-empirical model ofcatastrophic impact processes. I. Theory and laboratory experiments. Icarus121, 126–157.
Stern, S.A., Colwell, J.E., 1997. Collisional erosion in the primordial Edgeworth-Kuiper belt and the generation of the 30–50 AU Kuiper gap. Astrophys. J. 490,879–882.
Tanaka, H., Ida, S., 1999. Growth of a migrating protoplanet. Icarus 139, 350–366.Tanaka, H., Inaba, S., Nakazawa, K., 1996. Steady-state size distribution for the self-
similar collision cascade. Icarus 123, 450–455.Takagi, Y., Mizutani, H., Kawakami, S., 1984. Impact fragmentation experiments of
basalts and pyrophyllites. Icarus 59, 462–477.Thébault, P., Augereau, J.-C., 2007. Collisional processes and size distribution in
spatially extended debris discs. Astron. Astrophys. 472, 169–185.Wyatt, M.C., Smith, R., Greaves, J.S., Beichman, C.A., Bryden, G., Lisse, C.M., 2007.
Transience of hot dust around Sun-like stars. Astrophys. J. 658, 569–583.Wetherill, G.W., Stewart, G.R., 1993. Formation of planetary embryos: Effects of
fragmentation, low relative velocity, and independent variation of eccentricityand inclination. Icarus 106, 190–209.
Williams, D.R., Wetherill, G.W., 1994. Size distribution of collisionally evolvedasteroidal populations – Analytical solution for self-similar collision cascades.Icarus 107, 117–128.