Embed Size (px)
Citation preview

1
Fragility of Decentralized Load-Side FrequencyControl in Stochastic Environment
Sai Pushpak and Umesh Vaidya
Abstract—In this paper, we demonstrate the fragility of decen-tralized load-side frequency algorithms proposed in [1] againststochastic parametric uncertainty in power network model.The stochastic parametric uncertainty is motivated throughthe presence of renewable energy resources in power systemmodel. We show that relatively small variance value of theparametric uncertainty affecting the system bus voltages causethe decentralized load-side frequency regulation algorithm tobecome stochastically unstable. The critical variance value ofthe stochastic bus voltages above which the decentralized controlalgorithm become mean square unstable is computed using ananalytical framework developed in [2], [3]. Furthermore, thecritical variance value is shown to decrease with the increasein the cost of the controllable loads and with the increase inpenetration of renewable energy resources. Finally, simulationresults on IEEE 68 bus system are presented to verify the mainfindings of the paper.
I. INTRODUCTION
In this paper, we show that the decentralized load-sidefrequency control algorithm proposed in [1] is very fragileto parametric uncertainty in power network model. One ofthe essential components of the smart grid vision is the activeparticipation of loads for improved operation and performanceof network power system at different time scales [4]. The tech-nology is maturing to the point where the smart grid vision canbe realized for actively controlling the loads to absorb not onlythe long-term variability or uncertainty from renewable powergeneration but also short term fluctuations. The application ofload-side control for frequency regulation falls into the lattercategory. With the potential benefits of active load control,there are increased research efforts towards the developmentof systematic analytical methods and optimization-based toolsfor distributed load control. Most of the literature on thistopic primarily focus on stability properties of control algo-rithms developed for load-side frequency regulation [5]–[10].In particular, [1] proves the asymptotic stability of primal-dual gradient system leading to the decentralized algorithmfor load-side frequency control. However, the important issuerelated to the performance of these algorithms is not addressedprimarily in the presence of parametric uncertainty in powernetwork model.
For the successful implementation of the various developedalgorithms, it is important to analyze the performance ofthese algorithms against both parametric and additive sourcesof uncertainties. In this paper, we extended the primal-dual
Financial support from the National Science Foundation grant CNS-1329915 and ECCS-1150405 is gratefully acknowledged. U. Vaidya is withthe Department of Electrical & Computer Engineering, Iowa State University,Ames, IA 50011.
gradient system model of power swing equation with con-trollable loads developed in [1] to incorporate the stochasticparametric uncertainty. There are various sources of parametricuncertainty in power system model. In this paper, we arguethat renewable energy resources in the form of wind andsolar are the potential source of parametric uncertainty in thenetwork power system, where stochasticity in the availabilityof renewable energy resources will lead to stochastic busvoltages. We develop stochastic power network model with theadditive as well as the multiplicative source of uncertainty. Thestochastic notion of mean square stability is used to analyzethe stability of network power system using stochastic stabilityframework for the continuous-time system developed in [2],[3], [11]. The continuous-time stochastic stability frameworkdiscussed in this paper is motivated from stochastic stabilityanalysis and control results developed for linear and nonlinearsystems in [12]–[15]. The developed framework is used todetermine the critical variance, σ2
∗, of parametric stochasticuncertainty above which, the system is mean square unstable.We show that decentralized load-side frequency regulationalgorithm developed in [1] is extremely fragile to stochasticfluctuations in bus voltages. In particular, we show that, withan increase in the cost of the controllable loads, the valueof critical variance, σ2
∗, above which the system is unstabledecreases. Furthermore, σ2
∗ value also decreases with theincrease in the penetration of the renewable energy resourcesin the power network.
The organization of the paper is as follows. In section II, weprovide a framework for incorporating stochastic parametricuncertainty in dynamic power system model employed forsolving the load-side frequency regulation problem. Resultson analyzing the mean square stability of stochastic powernetwork model are discussed in section III. Simulation resultson IEEE 68 bus system are presented in section IV followedby conclusion in section V.
II. LOAD-SIDE FREQUENCY CONTROL MODEL WITHSTOCHASTICITY
In this section, we develop an integrated load-side frequencycontrol model with stochastic uncertainty. There are varioussources of stochastic uncertainty in a power network andrenewables energy sources such as solar and wind energyforms the major contributors to the uncertainty. We firstdiscuss briefly the deterministic load-side frequency controlmodel as developed in [1]. We refer the readers to [1] formore detailed discussion on this model. The basic idea behindthe load-side frequency control is to control the loads, so that,
arX
iv:1
702.
0347
7v1
[m
ath.
OC
] 1
2 Fe
b 20
17

2
the system-wide frequency can be regulated following a smallchange in power injection at one of the system bus. The loadcontrol comes at a cost and is measured by the aggregatedisutility of the loads. The objective is to regulate the systemfrequency while minimizing the aggregate disutility of theloads.
To set up the problem, consider a power network as a graphnetwork with generator and load buses as nodes and trans-mission lines as edges. Let the sets G,L, and E respectively,denote the set of generator nodes, set of load nodes, and theset containing network edges. The cardinalities of the setsG,L, and E are denoted by ng, nl, and p respectively. Let Ndenote the set of generator and load nodes and its cardinalityis given by n, where n = ng+nl. The dynamic network modelfor regulating system frequency using load can be written asfollows (we refer the readers to [1] for various assumptionleading to this model).
ωj = − 1
Mj(dj + dj − Pmj + P outj − P inj ), ∀j ∈ G
0 = dj + dj − Pmj + P outj − P inj , ∀j ∈ LPij = Wij(ωi − ωj), ∀(i, j) ∈ E (1)
where ωj is the frequency deviation at jth bus, Wij :=
3|Vi||Vj |Xij
cos(θ0i−θ0j ), where Vi, θ0i are the voltage and nominalphase angle at bus i, and Xij is the reactance betweenthe buses i and j. Three types of loads are distinguishedin the above model namely, frequency-sensitive, frequency-insensitive but controllable, and uncontrollable loads. Thequantity, dj models the frequency-sensitive load and is as-sumed to be of the form dj = Djωj , i.e., it respondslinearly to frequency deviation. Further, Pmj incorporates thepart of load which is frequency-insensitive and uncontrollableand dj models the load which is frequency-insensitive butcontrollable.
The objective is to design a feedback controllerdj(ω(t), P (t)) for the controllable loads, so that, frequencycan be regulated following disturbance, i.e., the system(1) is globally asymptotically stable. In [1], an alternateoptimization-based approach is proposed for adjusting thecontrollable load, dj . The design of feedback controller,dj(ω(t), P (t)), is posed as an optimal load control (OLC)problem and the feedback controller is derived as a distributedalgorithm to solve the OLC. The optimization problem forOLC is formulated as follows.
mind≤d≤d,d
∑j∈N
(cj(dj) +
1
2Djd2j
)(2)
subject to∑j∈N
(dj + dj) =∑j∈N
Pmj (3)
where cj(dj) is the cost on the controllable load at bus j, whenit is changed by dj and dj := Djωj denotes the frequencydeviation, ωj of the frequency sensitive load at bus j. Thechange in either generator or load bus j is denoted by Pmjand the loads always satisfy −∞ < dj ≤ dj ≤ dj < ∞.Furthermore, the cost function cj at every bus j is assumedto be strictly convex and twice continuously differentiable on
[dj , dj ]. A dual to the OLC problem (2)-(3) which can besolved or implemented with a distributed architecture is writtenas
maxν
∑j∈NΦj(νj) (4)
subject to νi = νj , ∀(i, j) ∈ E , (5)
where Φj(νj) = cj(dj(νj)) − νjdj(νj) − 12Djν
2j + νjP
mj ,
dj(νj) =[c′−1j (νj)
]djdj
, and c′
j(νj) is the derivative of the
cost function. Note that Φj is only a function of νj , the dualvariable, and all νj are constrainted to be equal at optimality.After some change of variables, it can be shown that theprimal-dual gradient system corresponding to optimizationproblem (4)-(5) takes the form as given below [1].
ωj =−1
Mj(dj + dj − Pmj + P outj − P inj ),∀j ∈ G, (6)
0 =dj + dj − Pmj + P outj − P inj ,∀j ∈ L, (7)
Pij =Wij(ωi − ωj),∀(i, j) ∈ E , (8)
dj =Djωj ,∀j ∈ N , (9)
dj =[c′−1j (ωj)
]djdj
, ∀j ∈ N . (10)
Notice that, the primal-dual gradient system is same as thedynamic network model for load frequency control, i.e., Eq.(1) except for the fact that the decentralized feedback controllaw for the controllable load is obtained as the solution of thisoptimization problem. This implies that the dynamic powernetwork model is essentially implementing the primal-dualgradient algorithm, where the feedback control law (10) needsto be implemented at each controllable load for decentralizedload-side frequency regulation of power network. In [1], theauthors prove the existence of unique equilibrium point forprimal-dual gradient system which is globally asymptoticallystable. The objective of this paper is to show that, theasymptotically stable property of this equilibrium point is veryfragile to the presence of multiplicative stochastic uncertaintyin the power network. In the following section, we motivatethe stochastic dynamic network model using uncertain andintermittent nature of wind energy.
A. Stochastic Renewables and Parametric Uncertainty
In this subsection, we show how the parametric uncer-tainty enters in the power system dynamics. We motivate theparametric uncertainty in the power system dynamics throughthe presence of renewables where the intermittent nature ofwind and solar energy resources are modeled as stochasticrandom variables. The network power system with parametricuncertainty can be modeled as a set of differential algebraicequations (DAEs) written as follows:
x = f(x, y, ξ) (11)0 = g(x, y, ξ) (12)
where, x are the dynamic states corresponding to generatorangular velocities, generator excitation voltages, power acrossthe transmission lines, etc., and y are the network as well as

3
generator algebraic states corresponding to the bus voltages,bus angles, currents, etc. and ξ denotes the stochastic paramet-ric uncertainty. In the following discussion we will identify theprecise source of parametric uncertainty in both the differentialequation and algebraic equation. The network power systemmodel with renewable wind energy resources will consists ofconventional synchronous generators as well as doubly fedinduction generators (DFIG). We refer the readers to [16]for more detailed discussion on the deterministic modelingof network power system with renewable wind generation.A zero-axis model [16] for DFIG obtained by neglecting thedynamics of the stator and rotor flux linkages is given by,
dωrdt
= ωs
2HD
(TmD − XmIqsIdr + XmIdsIqr
)(13)
where ωr is the electrical rotor speed of DFIG,Iqr, Iqs, Idr, Ids are the algebraic states of DFIG, andTmD = BωbCp(λ, θ)
v3wind
ωr. The wind speed vwind is
intermittent in nature and hence can be modeled as stochasticrandom variable as follows:
v3wind = v3wind0 + ξ (14)
where vwind0 is the nominal wind speed and ξ is the stochasticuncertainty. Now substituting (14) in the expression of TmDand after substituting TmD in (13), we notice that the randomvariable, ξ, multiply system state 1
ωrand hence enter para-
metrically in the dynamic state equation of power system. Thepresence of parametric uncertainty in the algebraic equation ofthe power system can be explained as follows. The algebraicequation corresponding to DFIG affected by the wind speedis written as follows [16]
0 = −Vqr +KP2[KP1(Pref − Pgen) + z1 − Iqr] + z2,
where Vqr, Iqr are the algebraic states of DFIG and z1, z2 arethe dynamic states of speed controller of DFIG. The powerreference input is written as
Pref = ωrefTmD.
Again substituting TmD = BωbCp(λ, θ)1ωr
(v3wind0 + ξ), wenotice that the stochastic parametric uncertainty enters theDAE equations of DFIG.
In the absence of stochastic uncertainty, i.e., when ξ = 0and under the assumption that ∂g
∂y 6= 0, implicit functiontheorem can be applied to network algebraic equation (12)to eliminate the algebraic state y by expressing y = h(x). Inthe presence of stochastic uncertainty, an argument involvingcenter manifold based reduction for stochastic system andsingular perturbation theory for stochastic system [17], [18]the algebraic states, y can be expressed as a stochastic functionof states x i.e., y = h(x, ξ). Using this in Eq. (11), we obtain,
x = f(x, h(x, ξ), ξ)
The above system can be linearized at a nominal operatingpoint to obtain a linear system, where the stochastic uncer-tainty enters the linearized system parametrically.
In the following, we show how the stochastic uncertainty inthe algebraic states propagates into the network power system.One of the algebraic states that is of particular interest to us is
the bus voltages. It is clear that uncertainty in renewables willcause the voltage to behave randomly. Apart from voltages,there are other network parameters that one can assume to beuncertain and hence modeled as a stochastic random variable.For example, the frequency-sensitive loads can be assumedto be uncertain, i.e., dj = (Do + dξD1)ωj , where dξ isstochastic process. Note that the uncertainty is assumed to beparametric, where the damping coefficient is changing overtime. The loads are constantly turned on and off in the gridand thereby changing the effective damping coefficient of thefrequency-sensitive loads. Similarly, the frequency-insensitiveuncontrollable loads can also be uncertain. However, in thispaper, we mainly focus on the bus voltages being uncertainand analyze the impact of stochastic voltage fluctuations onthe system stability. Suppose, p1 < ng generators in the powernetwork are now replaced with a renewable energy source.As we are modeling the voltages at renewable buses to bestochastic, the voltages at buses connecting the renewablesare also stochastic. Let S be the set of a pair of buses whosevoltages are stochastic and its cardinality be denoted by s < p,where p is the number of total links in the network. Under theassumption that the nominal voltages are 1 p.u., stochasticvoltage fluctuations are modeled as follows:
|Vi||Vj | = 1 + σdξk ∀(i, j) ∈ S (15)
where dξk is the standard Wiener process and σ is the standarddeviation assumed to be same for all links. We use uniqueindex k to identify and denote the edge pair (i, j) ∈ S andhence k = 1, . . . , s.
Furthermore dξk is assumed to be independent of dξ` fork 6= `. For the simplicity of presentation, we assume that allthe links in the networks have the same variance, σ2.
Remark 1: Notice that instead of assuming individual busvoltages to be random, we are assuming product of voltagesto be random. This is a modeling assumption and is madeto avoid technical difficulty that arises while multiplying twostochastic processes.We now make following assumption on the cost function cj .
Assumption 2: We assume that the cost function cj is
quadratic and hence of the form cj(dj) =d2j2αj
for all j ∈ N .Furthermore, we neglect the saturation constraints on the costfunction and hence optimal decentralized control law for thecontrollable load is of the form dj = αjωj .
III. STOCHASTIC STABILITY OF POWER NETWORK
The deterministic dynamic network model (6)-(10) can becombined with the stochastic voltage fluctuation model (15)to write a power system model with multiplicative stochasticuncertainty. First, we write the deterministic power networkmodel (6)-(10) using Assumption 2 in compact form aftereliminating the algebraic equation (7) as follows:
ωG =−M−1G (DGωG + EGP − PmG )
P =W (E>GωG + E>LD−1L (PmL − ELP ))
(16)
where ωG ∈ Rng , ωL ∈ Rnl and P ∈ Rp. Observethat MG, DG, DL are diagonal matrices. The weight matrix,W ∈ Rp×p is defined as a diagonal matrix with entries

4
Wij for all (i, j) ∈ E . The matrices EG and EL are theincidence matrices corresponding to generator and load busesrespectively. Next, we incorporate the uncertainty in the abovedeterministic model. Using Eq. (15), we can write the stochas-tic link weight, Wij as follows Wij = 3 (1+σdξk)
Xijcos(θ0i −θ0j ).
Define W 0ij := 3 1
Xijcos(θ0i − θ0j ), and hence, we have
Wij = W 0ij + σW 0
ijdξk. (17)
Substituting (17) in (16), we obtain following stochastic powernetwork model with some abuse of notation.
ωG = −M−1G (DGωG + EGP − Pm
G ) (18)
P = (W 0 + σW 0 ◦ dξ)(E>GωG + E>LD−1L (Pm
L − ELP ))
where W 0 = diag(W 0ij) for (i, j) ∈ E , dξ is a diagonal
matrix with zeros and dξ1, . . . , dξs. The nonzero entries ofdξ correspond to the links given in set S. The symbol, ◦denotes element-wise matrix multiplication. To represent thesystem (18) in standard robust control form (refer to Fig. 1),we rewrite the system equation in slightly different form. Wefirst define u := [ω>G P>]> and
du =Audt+ bdt+∑sk=1σBk(Cku+ Gk)dξk
where,
A =
[−M−1
G DG −M−1G EG
W 0E>G −W 0E>LD−1L EL
], b =
[M−1
G PmG
W 0E>LD−1L Pm
L
],
Bk =
[0ek
], Ck =
[(W 0E>G)k −(W 0E>LD
−1L EL)k
],
Gk =[(W 0E>LD
−1L Pm
L )k],
where ek ∈ Rp is a vector of all zeros except for 1 in thekth location. Chose u∗, such that, Au∗ + b = 0 and definev = u−u∗ to shift the equilibrium of the deterministic systemto origin. Then, we have
dv =Avdt+
s∑k=1
σBkCkvdξk +
s∑k=1
σBk(Cku∗ + Gk)dξk (19)
The matrix A is singular and consists of non-zero null space.In the following, we perform a change of coordinates toseparate the dynamics on and off the null space of A matrix.
Let Ns(A) and Rs(A) denotes the set of vectors whichspan the null space and range space of A. Then, define thetransformation matrix, V =
[Ns(A) Rs(A)
]. Using the
transformation matrix, V , we define [dx> dy>]> := V >dv.It can be shown, after the transformation, various transformedmatrices has the following structure.[
0 Ayx
0 Axx
]:=V >AV[
0 (V >BkCkV )yx0 (V >BkCkV )xx
]:=V >BkCkV[
(V >Bk(Cku∗ + Gk))yx
(V >Bk(Cku∗ + Gk))xx
]:=V >Bk(Cku
∗ + Gk)
where Axx ∈ Rn×n, Ayx ∈ Rnl×n. Using the fact thatBk and Ck are column vector and row vector respectively,the matrix BkCk is rank deficient. It is easy to show that(V >BkCkV )xx is also rank deficient and hence we write(V >BkCkV )xx ∈ Rn×n also as a product of columnvector and row vector. In particular, we write, BkCk :=(V >BkCkV )xx, where Bk and Ck are n dimensional column
vector and row vector respectively. Note that, the decomposi-tion of the matrix as a product of two rank one matrices isnot unique, but the final stability results are independent of thedecomposition. Defining Gk := (V >Bk(Cku
∗+Gk))xx ∈ Rnand A := Axx we write Eq. (19) in the transformed coordi-nates as follows
dy =Ayxxdt+∑sk=1σ(V >BkCkV )yxxdξk
+∑sk=1σ(V >Bk(Cku
∗ + Gk))yxdξk, (20)dx =Axdt+
∑sk=1σBkCkxdξk +
∑sk=1σGkdξk, (21)
where x ∈ Rn and y ∈ Rng−n. We notice that the y dynamicsis completely driven by x dynamics and noise processeswhereas, x dynamics is not influenced by y dynamics. Hence,the necessary condition for the stability of the above systemof equations (20)-(21) is that, x dynamics is stable. We definefollowing notion of second moment bounded stability forsystem (21).
Definition 3: [Second Moment Bounded] System (21) issaid to be second moment bounded if there exists a positiveconstant K, such that limt→∞E[x(t)>x(t)] ≤ K for allx(0) ∈ Rn.Now, consider the stochastic power network without the addi-tive noise term as follows.
dx =Axdt+∑si=1σBkCkxdξk. (22)
Following notion of mean square exponential stability can beintroduced for (22).
Definition 4: [Mean Square Exponentially Stable] System(22) is mean square exponentially stable, if there exist positiveconstants K and β, such that
E[x(t)>x(t)] ≤ K exp−βtE[x(0)>x(0)] ∀ x(0) ∈ Rn.
The connection between the stability of systems given in Eqs.(21) and (22) is established in the following Lemma.
Lemma 5: The system (22) is mean square exponentiallystable if and only if system (21) is second moment bounded.Proof. Refer to Appendix for the proof. Using Lemma 5,it suffices to analyze the mean square exponential stability ofsystem without additive noise given in Eq. (22).
In order to apply the results of mean square stability from[2], [3], system (22) should be rewritten in the standard robustcontrol form with a deterministic system in feedback withstochastic uncertainty (refer to Fig. 1). In doing so, we rewritethe stochastic power network model as feedback interconnec-tion of the deterministic system and stochastic uncertainty.
! "#
Δ
Fig. 1: Feedback intercon-nection of G & ∆, F(G,∆).
The deterministic part of thesystem is given by
G :
{x =Ax+ Bwz =Cx
(23)
where the control and dis-turbance variables are respec-tively z ∈ Rs and w ∈ Rs.The matrix B is formed bystacking Bk’s in the columnsand C matrix is formed bystacking Ck’s in the rows. This

5
deterministic system, G now interacts with the stochasticuncertainty, ∆ and the interconnected system is denoted byF(G,∆). The stochastic power network model is writtenas feedback interconnection of deterministic and stochasticuncertainty as follows:
F(G,∆) :
x =Ax+ Bwz =Cxw =∆z
(24)
where the matrix, ∆, is a diagonal matrix whose entries areσdiag(dξ1
dt , . . . ,dξsdt ). The stochastic uncertainty is interacting
with the deterministic system through the control and dis-turbance variables. Clearly, for the stochastic system to bemean square stable, we require that the deterministic systemis stable, i.e., A is Hurwitz. Note that, in the power systemmodel, the matrix A is Hurwitz. Under the assumption thatthe system matrix A is Hurwitz, we have following necessaryand sufficient condition for mean square stability.
Theorem 6: [2] The feedback interconnection F(G,∆) ismean square exponentially stable if and only if σρ(G) < 1,where ρ stands for the spectral radius of a matrix and
G :=
‖ G11 ‖22 . . . ‖ G1s ‖22
.... . .
...‖ Gs1 ‖22 . . . ‖ Gss ‖22
. (25)
The notation, ‖ Gij ‖2 is the H2 norm of the system G fromdisturbance input, j and controlled output, i.Refer to [2] for the proof. The result of the above theoremcan be used to compute critical value of σ∗ above which, thesystem is mean square unstable. In particular, the critical value,σ∗ is given by, σ∗ = 1
ρ(G).
IV. IEEE 68 BUS SYSTEM
In this section, we consider the IEEE 68 bus network to an-alyze the load-side primary frequency control with stochasticload voltages. IEEE 68 bus New England/New York intercon-nection test system consists of 16 generator buses and 52 loadbuses. The single-line diagram of the 68 bus test system isshown in Fig. 2. This system contains induction motor loads,constant power loads, and controllable loads. The relevant datafor this system is obtained from the data files of power systemtoolbox [19].
As discussed in Section II, we include the renewables inthe power network, and the uncertain, intermittent nature ofrenewables are modeled into the power network by consideringthe voltages to be stochastic. Changing the controllable loadsinvolves a cost measured in the form of aggregate disutility ofloads, and it has to be minimized.
In this 68 bus system, there are 29 induction motor loadswhich are sensitive to frequency, 35 controllable loads and theremaining loads are uncontrollable frequency insensitive loads.Now, we replace few of the classical generators with renewableenergy sources such as either solar or wind power. As there areno large moving parts at these renewables, the inertia valuesat these buses are relatively smaller, when compared to theclassical generators [20]. Further, integration of renewablesinto the power network increases the damping slightly [21].
Therefore, we assume a relatively smaller value for inertia atrenewables location and relatively bigger value for dampingat those places. For the simulation purpose, we consider therenewable energy source at buses 54, 55, 56, 60, 63, 64 and 65replacing the generator buses. Now, the buses connecting therenewable buses are 6, 10, 19, 25, 32, 36 and 52 and hence, s =7.
In the given data, the inertia values at generator buses liebetween 1 − 5, whereas, at the buses with renewable energy,we have considered it as 0.5. Similarly, the damping values atgenerator buses are in the range of 0−5, and we consider thedamping at renewable energy buses to be 6. The simulationsresults discussed below are consistent with the range of inertiavalues between 0.5− 1 and damping values between 5− 6.
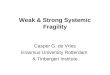
Next, we analyze the effect of cost on controllable loadson the load-side primary frequency control with stochasticrenewables. If the cost on controllable loads is high, then itis difficult to vary the controllable loads. Using the analyticalframework discussed in section III, we identify the criticalvariance that can be tolerated in the voltages while maintainingthe mean square exponential stability of power network witha decentralized controller. The critical variance value, σ2
∗, isobserved to be very small in the order of 10−3 with themaximum variance value of 1.9 × 10−3 which is obtainedwhen the cost coefficient on the controllable load is equal toα = 0.5 (Refer to Assumption 2). In Fig. 3, observe that, ifthe cost of controllable loads is further increased, the criticalvariance that can be tolerated by the stochastic power networkreduces. It is important to notice that, for most of the costvalues on controllable loads, the critical variance is very small.In generating Fig. 3, all the damping values at generator andload buses are kept constant.
Observe that, if the variance that can be tolerated by thesystem is small, then the system is on the verge of stability.This nature of the system can be seen, when we consider thestochastic voltages with a variance, σ2 > σ2
∗, the frequenciesgrow out of bounds, and the power network becomes meansquare unstable. This phenomenon is seen in Figs. 4 and 5.The stochastic voltage variation with respect to time is shownin Fig. 4. In Fig. 4, for the chosen σ2 > σ2
∗, it is importantto emphasize that although the voltages values lie within thesafe operating limits of 0.95 pu to 1.05 pu, but the frequenciesviolate the operating limits as seen in Fig. 5. This showsthe fragility of the decentralized controller in the presence ofrenewables, as it is inadequate to regulate the frequency bymeans of controllable loads.
Fig. 2: Single-line diagramof IEEE 68 bus system
2 25 50 75 100Cost
0
0.5
1
1.5
2
Crit
ical
var
ianc
e
#10-3
Fig. 3: Variation of critical variancewith cost

6
0 10 20 30 40 50Time (sec)
0
0.2
0.4
0.6
0.8
0.951
1.05
Stoc
hast
ic v
olta
ge (p
u)
Fig. 4: Voltage fluctuation atgenerator bus 56
0 10 20 30 40 50Time (sec)
57
58
59
60
61
62
63
Freq
uenc
ies
at a
ll ge
nera
tors
(Hz)
Fig. 5: Mean square unstable behav-ior of frequencies at all generatorbuses.
0 20 40 60Time (sec)
59.85
59.9
59.95
60
60.05
60.1
Freq
uenc
y (H
z)
Fig. 6: Frequency at gener-ator bus 53 following a stepchange in power.
2 4 6 8 10 12 14 16Number of renewables
2
4
6
8
10
Crit
ical
var
ianc
e
#10-3
Fig. 7: Critical variance with in-crease in number of renewables
Consider a step change in the power network. For thisstep change in power, the decentralized frequency controller isineffective in controlling the controllable loads to regulate thefrequency. In Fig. 6, initially the system was in stable operatingcondition with frequencies within the operating limits. Wecreated a step change in power after 10 seconds, and thenthe frequencies oscillate and go out of the operating rangeand continue to oscillate. This phenomenon is not desirable,as it has the impact to damage the power system equipment.
Hence, to counteract the fragility of this decentralizedcontroller, a modified robust distributive controller must bedesigned to regulate the frequency that can tolerate uncertaintyin the renewables.
The higher penetration of renewables in the power networkwill make the decentralized frequency control algorithm morefragile. In particular, with the increase in the number ofrenewable energy resources, more bus voltages will becomeuncertain, and this has an adverse impact on the frequencyregulation. Fig. 7 shows the effect of increasing the penetrationof renewables in the power network. We notice, with theincrease in penetration (i.e., with an increase in the value ofs) the critical variance that can be tolerated by the systemdecreases. Note that, this figure will change based upon whichlocations in the network are chosen for renewables. However,the trend of decrease in the value of critical variance with theincrease in the number of renewables will continue to holdtrue.
V. CONCLUSION
We showed that the decentralized load-side frequency regu-lation algorithm is fragile to stochastic parametric uncertaintyin a power network. The presence of stochastic uncertainty ismotivated through uncertainty in renewables. We show that
the decentralized algorithm becomes more fragile with theincrease in the cost of the controllable loads and also withthe increased degree of penetration of renewable resources.System theoretic-based analysis and synthesis framework de-veloped for the stochastic networked system in [2], [11] isused to prove the main results. Our future research efforts willbe focused on the design of distributed frequency regulationalgorithm robust to stochastic uncertainty in power networkusing the synthesis framework developed in [2].
REFERENCES
[1] C. Zhao, U. Topcu, N. Li, and S. Low, “Design and stability of load-side primary frequency control in power systems,” IEEE Transactionson Automatic Control, vol. 59, no. 5, pp. 1177–1189, 2014.
[2] S. Pushpak, A. Diwadkar, and U. Vaidya, “Stochastic stability analysisand synthesis of continuous-time linear networked systems,” arXivpreprint arXiv:1602.02857, 2016.
[3] ——, “Stability analysis and controller synthesis for continuous-timelinear stochastic systems,” in 54th IEEE Conference on Decision andControl, Osaka, Japan. IEEE, 2015, pp. 3792–3797.
[4] F. E. R. C. staff report, “Assessment of demand response and advancedmetering,” in United States Department of Energy, 2006.
[5] D. Trudnowski, M. Donnelly, and E. Lightner, “Power-system frequencyand stability control using decentralized intelligent loads,” in 2005/2006IEEE/PES Transmission and Distribution Conference and Exhibition.IEEE, 2006, pp. 1453–1459.
[6] J. A. Short, D. G. Infield, and L. L. Freris, “Stabilization of gridfrequency through dynamic demand control,” IEEE Transactions onPower Systems, vol. 22, no. 3, pp. 1284–1293, 2007.
[7] A. Molina-Garcia, F. Bouffard, and D. S. Kirschen, “Decentralizeddemand-side contribution to primary frequency control,” IEEE Trans-actions on Power Systems, vol. 26, no. 1, pp. 411–419, 2011.
[8] M. Andreasson, D. V. Dimarogonas, K. H. Johansson, and H. Sandberg,“Distributed vs. centralized power systems frequency control,” in 12thEuropean Control Conference, ECC, Zurich, Switzerland, 2013, pp.3524–3529.
[9] T. Namerikawa and T. Kato, “Distributed load frequency control ofelectrical power networks via iterative gradient methods,” in 50th IEEEConference on Decision and Control and European Control Conference.IEEE, 2011, pp. 7723–7728.
[10] C. Zhao, E. Mallada, and S. H. Low, “Distributed generator and load-side secondary frequency control in power networks,” in 49th AnnualConference on Information Sciences and Systems (CISS). IEEE, 2015,pp. 1–6.
[11] S. Pushpak and U. Vaidya, “Control of inter-area oscillation with noisecorrupted wide area measurement,” in American Control Conference,Boston, USA. IEEE, 2016, pp. 7498–7503.
[12] A. Diwadkar, S. Dasgupta, and U. Vaidya, “Control of systems inLure form over erasure channels,” International Journal of Robust andNonlinear Control, vol. 25, no. 15, pp. 2787–2802, 2015.
[13] A. Diwadkar and U. Vaidya, “Stabilization of linear time varyingsystems over uncertain channels,” International Journal of Robust andNonlinear Control, vol. 24, no. 7, pp. 1205–1220, 2014.
[14] U. Vaidya and N. Elia, “Limitations of nonlinear stabilization overerasure channels,” in 49th IEEE Conference onDecision and Control(CDC). IEEE, 2010, pp. 7551–7556.
[15] N. Elia, “Remote stabilization over fading channels,” Systems & ControlLetters, vol. 54, no. 3, pp. 237–249, 2005.
[16] H. A. Pulgar Painemal, “Wind farm model for power system sta-bility analysis,” Ph.D. dissertation, University of Illinois at Urbana-Champaign, 2011.
[17] L. Arnold, Random Dynamical Systems. Springer Science & BusinessMedia, 2013.
[18] N. Berglund and B. Gentz, “Geometric singular perturbation theory forstochastic differential equations,” Journal of differential equations, vol.191, no. 1, pp. 1–54, 2003.
[19] J. H. Chow and K. W. Cheung, “A toolbox for power system dynamicsand control engineering education and research,” IEEE transactions onPower Systems, vol. 7, no. 4, pp. 1559–1564, 1992.
[20] D. Gautam, V. Vittal, and T. Harbour, “Impact of increased penetrationof DFIG-based wind turbine generators on transient and small signalstability of power systems,” IEEE Transactions on Power Systems,vol. 24, no. 3, pp. 1426–1434, 2009.

7
[21] J. Slootweg and W. Kling, “The impact of large scale wind power gen-eration on power system oscillations,” Electric Power Systems Research,vol. 67, no. 1, pp. 9–20, 2003.
[22] O. L. V. Costa, M. D. Fragoso, and R. P. Marques, Discrete-time Markovjump linear systems. Springer Science & Business Media, 2006.
APPENDIX
Here, first we recall from [2], the covariance propagationequation for the systems given in (22) and (21). Let Q(t)and Q(t) be the covariance matrices corresponding to (22)and (21). Then, they satisfy the following matrix differentialequations (MDE’s).
Q(t) =Q(t)A> +AQ(t) +
p∑k=1
σ2kBkQ(t)B>k , (26)
˙Q(t) =Q(t)A> +AQ(t) +
p∑k=1
σ2kBkQ(t)B>k +
p∑k=1
GkG>k
+
p∑k=1
σkGkµ(t)>B>k +
p∑k=1
σkBkµ(t)G>k . (27)
The following equation shows the mean propagation equationfor the system with additive noise given in (21).
µ(t) =Aµ(t) (28)
Next, we present the proof of Lemma 5.Lemma 5. Using the operator φ, that transforms a matrix
into a vector as defined in [22][Chapter 2], the MDE’s givenin Eq. (26) and Eq. (27) are written as linear differentialequations as given below.
q = A q, (29)˙q = A q + B, (30)
where q = φ(Q), q = φ(Q), B =∑pk=1((Gk ⊗ Gk) +
((σkGkµ>) ⊗ Bk) + (Bk ⊗ (σkµ
>Gk)))φ(I) ∈ Rn2
andA = A ⊕ A +
∑pk=1 σ
2k(Bk ⊗ Bk) ∈ Rn2×n2
, where I isthe identity matrix of size n×n and ⊗ denotes the Kroneckerproduct, ⊕ is the Kronecker sum.
Necessity: The mean square exponential stability of system(22) yields stability of system (29), that is, A is Hurwitz.Since A is Hurwitz, the steady state value of q is givenby limt→∞ q(t) = limt→∞ φ(Q(t)) = −A −1(
∑pk=1Gk ⊗
Gk)φ(I). Now, taking the inverse φ operator, we obtain,limt→∞E[x(t)x(t)>] = −φ−1(A −1(
∑pk=1Gk ⊗ Gk)φ(I)),
which is finite. Further, the necessary condition for A tobe Hurwitz is A being Hurwitz. This implies that the meanpropagation system of (21), shown in Eq. (28) has a stableevolution. Therefore, system (21) is second moment bounded.
Sufficiency: If system (21) is second moment stable, thenlimt→∞ Q(t) is a finite value and the mean system (28)has a stable evolution. Taking the operator, it can be alter-nately written as, limt→∞ φ(Q(t)) = limt→∞ eA tφ(Q(0))−A −1(1−eA t)(
∑pk=1Gk⊗Gk)φ(I)+eA t(
∑pk=1(σkGkµ
>)⊗Bk)φ(I)+eA t(
∑pk=1Bk⊗(σkµ
>Gk))φ(I). The limit on theright-hand side is finite, if and only if A is Hurwitz. If A isHurwitz, then the system (22) is mean square exponentiallystable.