Embed Size (px)
Citation preview

Four-bar Linkage Synthesis for
Two and Three Task Positions
J. M. McCarthy and B. Roth
ME 322 Kinematic Synthesis of Mechanisms

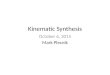
Coupler Curve
ME 322 Kinematic Synthesis of Mechanisms
A point P in the coupler of a four-bar linkage traces a curve, or trajectory, in the world frame W.
In the reference position, we have the vectors Z5=P-A and Z6=P-B. For each value of the input angle 𝛾, compute the output angle 𝜂 and the coupler angle 𝜑. Then the new coordinates P(𝛾) are given by
P(𝛾) = ZO + 𝜸Z1 + 𝝋Z5,
where 𝜸 and 𝝋 are the 2x2 matrix, or complex operator, that defines a rotation by angles 𝛾 and 𝜑, respectively
Notice that the trajectory of P can be also be defined in terms of the output crank Z3 and the angle 𝜂, given by,
P(𝜂) = ZC + 𝜼Z3 + 𝝋Z6,
where 𝜼 is the 2x2 matrix, or complex operator, for rotation by the angle 𝜂.
The curve P(𝛾) or P(𝜂) traced by the point P as the linkage moves is called a coupler curve.

Synthesis Equations
ME 322 Kinematic Synthesis of Mechanisms
We can use the equation of the coupler curve to obtain design equations for a four-bar linkage.
Assume the coordinates of the joints O and A are known and that we want to compute B and C so that a coupler point P is guided through five points P, P1, P2, P3, and P4.
From the equation of the coupler curve using the input crank we obtain,
P = ZO + Z1 + Z5,P1= ZO + 𝜸1Z1 + 𝝋1Z5,P2= ZO + 𝜸2Z1 + 𝝋2Z5,P3= ZO + 𝜸3Z1 + 𝝋3Z5, andP4= ZO + 𝜸4Z1 + 𝝋4Z5.
Our goal is to solve these equations to determine the vectors Z1
and Z5.

Synthesis Equations: Input Crank
ME 322 Kinematic Synthesis of Mechanisms
Subtract the first equation from the remaining four to cancel ZO and obtain
(𝜸1-1)Z1 + (𝝋1-1)Z5 - (P1- P) = 0,(𝜸2-1)Z1 + (𝝋2-1)Z5 - (P2- P) = 0,(𝜸3-1)Z1 + (𝝋3-1)Z5 - (P3- P) = 0, and(𝜸4-1)Z1 + (𝝋4-1)Z5 - (P4- P) = 0.
In what follows we use these equations to design four-bar linkages.
They are the four-bar synthesis equations for the cranks.
We solve the synthesis equations for Z1 and Z5, then compute ZO, from the equation,
P = ZO + Z1 + Z5.We can then obtain the coordinates of the pivots as,
O = ZO and A = ZO + Z1.

Synthesis Equations: Input Pivots
ME 322 Kinematic Synthesis of Mechanisms
Assume the coordinates of the joints O, A, B and C are unknown, but we do have a set of required coordinates for the coupler point P, given by the five points P, P1, P2, P3, and P4.
From the equation of the coupler curve using the input crank we obtain,
P = ZO + Z1 + Z5, andPj= ZO + 𝜸jZ1 + 𝝋jZ5, for j=1, 2, 3, 4.
Now substitute ZO = O, Z1 = A-O, and Z5=P-A to obtainP = O + (A - O) + (P - A) ,Pj= O + 𝜸j(A-O) + 𝝋j(P-A),
orPj - 𝝋jP = (1 -𝜸j)O + (𝜸j-𝝋j)A, for j=1, 2, 3, 4.
These are the four-bar synthesis equations for pivots.

Synthesis Equations: Output Crank
ME 322 Kinematic Synthesis of Mechanisms
Notice that a similar set of synthesis equations can be defined using the coupler curve P(𝜂) defined by the output crank of the four-bar linkage, given by
(𝜼1-1)Z3 + (𝝋1-1)Z6 - (P1- P) = 0,(𝜼2-1)Z3 + (𝝋2-1)Z6 - (P2- P) = 0,(𝜼3-1)Z3 + (𝝋3-1)Z6 - (P3- P) = 0, and(𝜼4-1)Z3 + (𝝋4-1)Z6 - (P4- P) = 0.
Solve these synthesis equations for Z3 and Z6, then compute ZC, from the equation,
P = ZC + Z3 + Z6.And we obtain the coordinates of the pivots,
C = ZC and B = ZC + Z3.

Synthesis Equations: Output Pivots
ME 322 Kinematic Synthesis of Mechanisms
Select values for P, Pj and 𝜑j so we can solve these synthesis equations for the coordinates of the pivots B and C.
Notice that a similar set of synthesis equations can be defined using the coupler curve P(𝜂) defined by the output crank of the four-bar linkage,
P = ZC + Z3 + Z6, andPj= Zc + 𝜼jZ3 + 𝝋jZ6, for j=1, 2, 3, 4.
Now substitute ZC = C, Z3 = B-C, and Z6=P-B to obtainP = C + (B - C) + (P - B),Pj= C + 𝜼j(B-C) + 𝝋j(P-B),
orPj - 𝝋jP = (1-𝜼j)C + (𝜼j-𝝋j)B, for j=1, 2, 3, 4.

Two Position Synthesis: Cranks
ME 322 Kinematic Synthesis of Mechanisms
If we specify the two points P, P1, and the input angle 𝛾1 and the
coupler angle 𝜑1, then we have the single synthesis equation:(𝜸1-1)Z1 + (𝝋1-1)Z5 - (P1- P) = 0.
1. If we select a value for Z5, then we can solve for Z1 to obtain Z1= (𝜸1-1)-1(-(𝝋1-1)Z5 + (P1- P)).
• Using Z1 and Z5, we compute ZO, from the equation,P = ZO + Z1 + Z5.
Therefore we have O = ZO and A = ZO + Z1.
2. Repeat this procedure for the output link by choosing a value Z6 and for 𝜂1, then we can solve for Z3 in the same way,
Z3= (𝜼1-1)-1(-(𝝋1-1)Z6 + (P1- P)).
• Use Z3 and Z6 to compute ZC, from the equation,P = ZC + Z3 + Z6,
then we have O = Zc and B = ZC + Z3.

Two Position Synthesis: Pivots
ME 322 Kinematic Synthesis of Mechanisms
If we specify the two points P, P1, and the rotation of the coupler 𝜑1 then, we have the single synthesis equation:
(1 -𝜸1)O + (𝜸1-𝝋1)A - (P1 - 𝝋1P) = 0.
1. If we select a value for the fixed pivot O of the input link, then we can solve for the moving pivot A to obtain
A =(𝜸1-𝝋1)-1 (P1 - 𝝋1P - (1 -𝜸j)O).
The angle 𝛾1 is a free parameter, so there are many points A that can be chosen to assemble with the fixed pivot O.
2. Repeat this procedure for the output link by choosing a value C and solve for B to obtain,
B =(𝜼1-𝝋1)-1 (P1 - 𝝋1P - (1 -𝜼j)C).
The angle 𝜂1 is a free parameter so there are many points B that can form the moving pivot for the chosen fixed pivot C.

Graphical Two Position Synthesis
ME 322 Kinematic Synthesis of Mechanisms

Three Position Synthesis: Input Crank
ME 322 Kinematic Synthesis of Mechanisms
1. If we specify the three points P, P1, P2, and the input angles 𝛾1
and 𝛾2 coupler angles 𝜑1 and 𝜑2, then we have the pair of synthesis equations:
(𝜸1-1)Z1 + (𝝋1-1)Z5 - (P1- P) = 0,(𝜸2-1)Z1 + (𝝋2-1)Z5 - (P2- P) = 0.
Row-reduce these equations to eliminate the vector Z1 and solve for Z5:
((𝜸1-1)(𝝋2-1)-(𝜸2-1)(𝝋1-1))Z5 - ((𝜸1-1)(P2- P)-(𝜸2-1) (P1- P)) = 0.
Thus,Z5 = ((𝜸1-1)(𝝋2-1)-(𝜸2-1)(𝝋1-1))-1 ((𝜸1-1)(P2- P)-(𝜸2-1) (P1- P)).
Solve for Z1 by back substitutionZ1 = (𝜸1-1)-1 (-(𝝋1-1)Z5 + (P1- P)).
It seems surprising that we can row-reduce matrix equations, but this is possible because 2×2 rotation matrices commute, therefore,
(𝜸1-1) (𝜸2-1)-(𝜸2-1)(𝜸1-1) = 0.

Three Position Synthesis: Input Pivots
ME 322 Kinematic Synthesis of Mechanisms
1. If we specify the three points P, P1, P2, and the coupler angles 𝜑1 and 𝜑2, then we have the pair of synthesis equations:
(1 -𝜸1)O + (𝜸1-𝝋1)A - (P1 - 𝝋1P) = 0,(1 -𝜸2)O + (𝜸2-𝝋2)A - (P2 - 𝝋2P) = 0.
Row-reduce these equations to eliminate the vector O and solve for A:
((1 - 𝜸1)(𝜸2-𝝋2)-(1 -𝜸2)(𝜸1-𝝋1))A - ((𝜸1-𝝋1)(P2 - 𝝋2P)-(1-𝜸2) (P1 - 𝝋1P)) = 0.
Thus,A =
((1 - 𝜸1)(𝜸2-𝝋2)-(1 -𝜸2)(𝜸1-𝝋1))-1((𝜸1-𝝋1)(P2 - 𝝋2P)-(1 -𝜸2)(P1 - 𝝋1P)).
Solve for O by back substitutionO = (1 -𝜸1)-1 ((P1 - 𝝋1P) - (𝜸1-𝝋1)A).
Both 𝛾1 and 𝛾2 are free parameters in this calculation.
We can row-reduce the matrix equations, because 2×2 rotation matrices commute, which means that
(1 -𝜸1)(1 -𝜸2)-(1 -𝜸2)(1 -𝜸1) = 0.

Three Position Synthesis: Output Crank
ME 322 Kinematic Synthesis of Mechanisms
2. Now specify the output angles 𝜂1 and 𝜂2, then we have the synthesis equations for the output link:
(𝜼1-1)Z3 + (𝝋1-1)Z6 - (P1- P) = 0,(𝜼2-1)Z3 + (𝝋2-1)Z6 - (P2- P) = 0.
Row-reduce these equations to eliminate the vector Z3 and solve for Z6:
((𝜼1-1)(𝝋2-1)-(𝜼2-1)(𝝋1-1))Z6 - ((𝜼1-1)(P2- P)-(𝜼2-1) (P1- P)) = 0.
Thus,Z6 = ((𝜼1-1)(𝝋2-1)-(𝜼2-1)(𝝋1-1))-1 ((𝜼1-1)(P2- P)-(𝜼2-1) (P1- P)).
Solve for Z3 by back substitutionZ3 = (𝜼1-1)-1 (-(𝝋1-1)Z6 + (P1- P)).

Three Position Synthesis: Output Pivots
ME 322 Kinematic Synthesis of Mechanisms
2. Now for the same points P, P1, P2, and the coupler angles 𝜑1 and 𝜑2, we have the synthesis equations for the output link:
(1 - 𝜼1)C + (𝜼1-𝝋1)B - (P1 - 𝝋1P) = 0,(1 - 𝜼2)C + (𝜼2-𝝋2)B - (P2 - 𝝋2P) = 0.
Row-reduce these equations to eliminate the vector C and solve for B:
((1 - 𝜼1)(𝜼2-𝝋2)-(1 - 𝜼2)(𝜼1-𝝋1))B - ((𝜼1-𝝋1)(P2 - 𝝋2P)-(1 - 𝜼2) (P1 - 𝝋1P)) = 0.
Thus,B =
((1 - 𝜼1)(𝜼2-𝝋2)-(1 - 𝜼2)(𝜼1-𝝋1))-1((𝜼1-𝝋1)(P2 - 𝝋2P)-(1 -𝜼2) (P1 - 𝝋1P)).
Solve for C by back substitutionC = (1 - 𝜼1)-1 ((P1 - 𝝋1P) - (𝜼1-𝝋1)A).
Both 𝜂1 and 𝜂2 are free parameters in this calculation.

Graphical Three Position Synthesis
ME 322 Kinematic Synthesis of Mechanisms

Geogebra: Construct Three Task Positions
ME 322 Kinematic Synthesis of Mechanisms
1. Create two variables a and b. Then select a point A and create a circle of radius 1. Select a point B on this circle and construct a right angle to define B’.
2. Introduce the vectors u=AB and v=AB’. Then in the input line type w=a*w+b*v. This creates a vector at the origin.
3. Use the “Vector from Point” tool to create a vector at A that defines a moving point A’.
4. Repeat these steps two more times using the new vectors defined at each step. The result is three task positions with two associated moving points.

Geogebra: Construct a Four-bar Linkage
ME 322 Kinematic Synthesis of Mechanisms
1. Given three task positions. Select a point A’ in the first task position and construct a circle through the corresponding points, A’C’E’, in the three task positions. The center of this circle is the fixed pivot G.
2. Select a second point and identify its corresponding points in the task positions, in this case A, C and E, and construct a circle through the three points. The center is the fixed pivot H.
3. Specify a point I on the circle around H, and construct the circle with the radius AA’ to find the point J. The four-bar HIJG moves the coupler IJ through the three task positions.

Summary
ME 322 Kinematic Synthesis of Mechanisms
• The curve traced by the trajectory of a curve in the coupler of a four-bar linkage is called the coupler curve.
• The equation of the coupler curve can be used to formulate synthesis equations for a four-bar linkage.
• The designer can require values for positions for the coupler linkage and calculate the dimensions of fixed and moving pivots.
• Row reduction of the vector synthesis equations is possible because 2×2 rotation matrices commute.
• The solution the synthesis equations for the input and output cranks yield the four-bar linkage that reaches the specified set of task positions.