Embed Size (px)
Citation preview

Forces and Motion
in the Atmosphere
v1.20
June 7, 2015
Brian H. Fiedler
University of Oklahoma

2
Copyright c©2015 Brian FiedlerPermission to reproduce individual copies of this treatise for personal use is granted. Multiplecopies may be created for nonprofit academic purposes. A fee may be charged to cover theexpense of reproduction. Reproduction for profit is prohibited without permission.Correspondence about this book may be sent to the author at [email protected]

Contents
Preface to v1.0 v
1 Units 11.1 Standard techniques for computing with units . . . . . . . . . . . . . . . . . 1
1.1.1 Conversion of units with a multiplier . . . . . . . . . . . . . . . . . . 11.1.2 Conversion of units using algebraic manipulation . . . . . . . . . . . 1
1.2 Alternative technique: putting unit conversion early . . . . . . . . . . . . . . 21.3 Delaying unit calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Another Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Dimensions 92.1 The dimension extractor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Dimensional homogeneity . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Example: diagnosing an invalid coefficient . . . . . . . . . . . . . . . 112.2.2 Example: hydrostatic pressure . . . . . . . . . . . . . . . . . . . . . . 112.2.3 Example: Bernoulli equation . . . . . . . . . . . . . . . . . . . . . . . 122.2.4 Example: Coriolis force . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2.5 Example: drizzle drop . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Vectors 153.1 Vectors as lists . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.2 A choice for unit vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 Example: Change of basis . . . . . . . . . . . . . . . . . . . . . . . . 203.3 The dot product and the cross product . . . . . . . . . . . . . . . . . . . . . 20
3.3.1 The dot product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3.2 The cross product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Vector identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.4.1 Completeness of the dot product and cross product . . . . . . . . . . 27
3.5 The gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Elementary functions 31
i

ii CONTENTS
4.1 The exponential function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.1.1 The Exponential Function in Differential Equations . . . . . . . . . . 334.1.2 The inverse of the exponential function . . . . . . . . . . . . . . . . . 34
4.2 Trigonometric functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.1 A graphical calculator . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.2 Trigonometric identities derived from calculus . . . . . . . . . . . . . 384.2.3 Trigonometry with Euclidean Faith . . . . . . . . . . . . . . . . . . . 394.2.4 Trigonometric functions and oscillations . . . . . . . . . . . . . . . . 40
4.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Review of Newtonian Mechanics 435.1 A quiz of elementary problems . . . . . . . . . . . . . . . . . . . . . . . . . . 435.2 Answers to the quiz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 465.3 Some mechanical theorems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.3.1 Equation of motion for the center of mass . . . . . . . . . . . . . . . 495.3.2 Angular momentum about the center of mass . . . . . . . . . . . . . 50
5.4 Newton’s legacy in the scientific method . . . . . . . . . . . . . . . . . . . . 525.4.1 The Moon and the apple . . . . . . . . . . . . . . . . . . . . . . . . . 52
6 The one-dimensional equation of motion 576.1 constant a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.2 a = a(t) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 586.3 a = a(v) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
6.3.1 drag force proportional to v . . . . . . . . . . . . . . . . . . . . . . . 596.3.2 drag force proportional to v2 . . . . . . . . . . . . . . . . . . . . . . . 60
6.4 a = a(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 626.4.1 A spring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 626.4.2 A comet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 636.4.3 The spring again . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
6.5 a = a(v, x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
7 Pressure 687.1 A force per unit area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 687.2 The pressure gradient force . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697.3 Pressure, the great communicator . . . . . . . . . . . . . . . . . . . . . . . . 717.4 The Bernoulli equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737.5 The horizontal pressure gradient force in a hydrostatic atmosphere . . . . . . 76
7.5.1 Summary of the pressure gradient force . . . . . . . . . . . . . . . . . 78
8 Buoyancy 798.1 The buoyancy force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798.2 Buoyancy-driven motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
8.2.1 Case #1, constant gΘ−ΘΘ
. . . . . . . . . . . . . . . . . . . . . . . . . 82
8.2.2 Case #2, gΘ−ΘΘ
linear with z . . . . . . . . . . . . . . . . . . . . . . . 82
8.2.3 Case #3, gΘ−ΘΘ
nonlinear with z . . . . . . . . . . . . . . . . . . . . 84

CONTENTS iii
8.3 Hydrostatic accommodation of density differences . . . . . . . . . . . . . . . 858.3.1 Computer simulations . . . . . . . . . . . . . . . . . . . . . . . . . . 87
9 Choosing a coordinate system 899.1 Using normal and tangential directions . . . . . . . . . . . . . . . . . . . . . 899.2 Using vertical and horizontal directions . . . . . . . . . . . . . . . . . . . . . 909.3 A question of interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
10 Polar coordinates 9310.1 Circular motion in Cartesian coordinates . . . . . . . . . . . . . . . . . . . . 9310.2 Dynamics in polar coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . 94
10.2.1 Circular, central-force motion . . . . . . . . . . . . . . . . . . . . . . 9710.2.2 Bead on a spoke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9710.2.3 Conservation of Angular Momentum . . . . . . . . . . . . . . . . . . 9810.2.4 Rankine vortex model of a tornado . . . . . . . . . . . . . . . . . . . 9910.2.5 Flow past a cylinder . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
11 Non-inertial reference frames 10411.1 Linearly accelerating reference frame . . . . . . . . . . . . . . . . . . . . . . 10511.2 Tidal forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10611.3 Rotating reference frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
11.3.1 General vector language for the inertial forces . . . . . . . . . . . . . 11411.4 A second derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
11.4.1 The vector equation of motion . . . . . . . . . . . . . . . . . . . . . . 11611.5 The dominant terms in the Coriolis force . . . . . . . . . . . . . . . . . . . . 118
11.5.1 Coriolis force on a car . . . . . . . . . . . . . . . . . . . . . . . . . . 11911.6 Explanations for a Coriolis force . . . . . . . . . . . . . . . . . . . . . . . . . 12011.7 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
12 The Gradient Wind 12312.1 Inertial oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12512.2 Geostrophic wind . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
12.2.1 Vector definition of the geostrophic wind . . . . . . . . . . . . . . . . 12612.3 Retain all 3 terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
12.3.1 Limits on high pressure cyclones . . . . . . . . . . . . . . . . . . . . . 12812.4 Solving the quadratic equation . . . . . . . . . . . . . . . . . . . . . . . . . . 128
12.4.1 The regular and anomalous solutions . . . . . . . . . . . . . . . . . . 13112.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
13 Angular momentum 13613.1 Angular momentum of the Hadley circulation . . . . . . . . . . . . . . . . . 13613.2 Rings of air on the f -plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
13.2.1 The energy equation . . . . . . . . . . . . . . . . . . . . . . . . . . . 13813.2.2 The neglect of sphericity . . . . . . . . . . . . . . . . . . . . . . . . . 138
13.3 The component equations on the f -plane . . . . . . . . . . . . . . . . . . . . 139

iv CONTENTS
13.4 Angular momentum in the f -plane . . . . . . . . . . . . . . . . . . . . . . . 14013.5 Vorticity and Potential vorticity . . . . . . . . . . . . . . . . . . . . . . . . . 14213.6 Isentropic potential vorticity . . . . . . . . . . . . . . . . . . . . . . . . . . . 14413.7 Elementary uses of potential vorticity calculations . . . . . . . . . . . . . . . 14513.8 A general deduction from conservation of potential vorticity . . . . . . . . . 14713.9 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
14 The Thermal Wind 14914.1 Thermal wind examples over Norman, Oklahoma. . . . . . . . . . . . . . . . 15314.2 Thermal wind as a wind shear derivative . . . . . . . . . . . . . . . . . . . . 15314.3 Veering, backing and advection . . . . . . . . . . . . . . . . . . . . . . . . . 15514.4 Contours and vectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15614.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157

Preface to v1.0
This book is intended as a textbook for METR 3113 Atmospheric Dynamics 1 at the Uni-versity of Oklahoma.
The notion of a blob (or parcel) of fluid being subject to the pressure gradient force, theforce of gravity and the Coriolis force can explain a lot of useful meteorology. The blobmodel does not account for the consequences of collision of blobs, meaning accelerations thatwould cause more than one blob to be in the same place. Properly accounting for that in amathematical model requires breaking away from modeling a fluid entity as a blob (handledlike the cannon ball of introductory physics courses) to the notion of mass and momentum
being continuously distributed, meaning coping with a velocity field as ~U(x, y, x, t) rather
than a velocity vector ~U(t). Meteorology theories dealing with ∇ · ~U and ∇ × ~U havetheir place in the undergraduate curriculum, but this book is premised on the idea thatthose theories are best introduced in a subsequent course. There is at least a semester ofdynamical meteorology that can be explored without mathematical models of vector fields.
The popular textbook An Introduction to Dynamic Meteorology by James Holton freelymentions vector calculus and vector fields from the opening chapter, but in fact much of themeteorology in the early chapters is not fluid (continuum) mechanics that actually requiresit. Specifically, the opening concepts of the Coriolis force, the equation of motion in non-Cartesian coordinate systems (spherical), inertial forces in a rotating Coordinate system (theCoriolis force), the gradient wind, hydrostatic balance and buoyancy, and the thermal winddon’t really require the del operator except for finding the gradient of the pressure gradientforce from the pressure field. The use of a divergence or curl of a vector field is otherwisedispensable in the opening Chapters of Holton, and is dispensible here also. In some ways,this book is intended as an alternative to Holton’s chapters 1-4, but offers far more reviewof basic concepts of dynamics (atmospheric and otherwise).
This book opens not in meteorology, but in an eclectic review of mathematics and Newtonianphysics. It is a big leap for a student who earned a C in Physics 1 to make much sense outof a derivation of a vorticity equation. This book aims to first turn that C student into atleast a B student in elementary Newtonian physics applied to atmospheric dynamics, beforeultimately making the leap to the vorticity equation in subsequent semesters.
v

vi PREFACE TO V1.0

1 Units
1.1 Standard techniques for computing with units
The methods that we teach students for computing with units of measurement are oftennot consistent with the practice of professionals. For professionals, the vast majority ofcomputations with quantities of measure is performed within programs on electronic com-puters, for which an accounting of the units occurred only once, in the design of the program.Subsequent users of the program are given instructions to submit input quantities with aprescribed unit of measure, meaning submitting a dimensionless ratio of the quantity to aparticular unit of measure. Likewise, users are also given instructions to interpret the numer-ical output as having prescribed units. Here we present a formal method for deriving boththe computer code for the numerical computation, meaning the formula, and for derivingthe instructions for submitting input and interpreting output.
1.1.1 Conversion of units with a multiplier
A child can associate numbers with units of measure (units), and convert the units: 2 packsof gum is 10 pieces of gum. Working with units is part of the language instinct. The word“per”, as in “3 teaspoons per tablespoon”, allows many people to successfully perform unitconversion, without recourse to manipulating mathematical symbols for units.
Conversion factor is often used to describe a pure number, such as in: “multiply acresby 4840 to obtain square yards”. The popularity of such instructions must stem, in part,because no algebraic manipulation of unit symbols needs to be comprehended, only somedexterity with arithmetic is required. Online unit conversion allows avoidance not only ofarithmetic, but also of knowledge of the conversion factor as a number. From the standardGoogle search form, entering “5 acres in square yards” returns “5 acres = 24 200 squareyards”.
1.1.2 Conversion of units using algebraic manipulation
Unlike vectors, which have a distinct symbolic notation such as ~v, a symbol for a unit, suchas m, can be mistaken for m. Here such mistakes will be avoided by using the color red, as
1

2 CHAPTER 1. UNITS
well as the traditional upright font, for units.
For those of us who can accommodate symbolic quantities in their equations, other thannumbers, a method for unit conversion follows from the equations of a unit definition orconversion relation such as:
1 ft = 12 in . (1.1)
If comfortable with elementary algebra, we may work with unit symbols using the same rulesas those for variables in algebra. For example, 3x is a multiplication of factors, as is 3 in.Using such rules for symbolic manipulation, we can derive
1 in =1
12ft . (1.2)
and confidently replace 1 in, or just the symbol in, by 112
ft, in any expression of quantity.
Alternatively we may derive from the conversion definition that
1 =12 in
1 ft. (1.3)
Knowing that “1 is the identity element in multiplication”, we may freely insert such ratiosof units that are equal to 1 into any term. Associative laws of multiplication allows rear-rangement and grouping of factors, yielding new ratios equal to 1, such as ft
ftthat can be
removed. Ultimately a quantity expressed with the desired units may emerge. For example,
5 ft = 5 ft12 in
1 ft=
ft
ft60 in = 60 in (1.4)
Judging by Google popularity rankings, the algebraic method is not very popular, and maybe regarded by many as “theoretical overkill” for their unit conversion tasks. For many, thefractions are evidently not superior to instructions on how to use a multiplier.
A popular university physics textbook calls these forms of 1 to be a “conversion factor(a ratio of units equal to unity)”1. The method of freely multiplying by these factors of 1to produce a desired unit conversion is called the “method of chain-link conversion”. Simi-larly, a university chemistry textbook describes this method as “Dimensional analysis (orfactor-label method) is the method of calculation in which one carries along the units forquantities. Google reveals “factor-label method” as a popular term within chemistry web-sites, and — rather peculiarly for those of us outside chemistry — “dimensional analysis” canbe synonymous with “factor-label method”. Within physics and meteorology, “dimensionalanalysis” is more likely consistent with a very broad concept introduced in Chapter 2.
1.2 Alternative technique: putting unit conversion early
The techniques in Section 1.1.2 may be well known to you, or you may employ similarprocedures for computing with units that work well for you. You may rightfully wonder
1This terminology conflicts with conversion factor describing a number other then one, such as the 4840used for converting acres to square yards.

1.2. ALTERNATIVE TECHNIQUE: PUTTING UNIT CONVERSION EARLY 3
why we are revisiting this elementary material is textbook about meteorology. Here is why:the techniques of Section 1.1.2 are very INEFFICIENT. Real meteorologists rarely use thosemethods!
To substantiate this provocative claim, we will use a rather obscure and unimportant equa-tion from Stull’s Meteorology for Scientists and Engineers equation [8.18], which we couldcall (1.5) the medium spherical raindrop fallspeed equation:
w = α
(ρoρair
R
)1/2
(1.5)
where w is the vertical component of velocity of the falling drop, and ρo = 1.225 kg m−3 isthe standard air density at sealevel, ρair is the ambient air density, R is the radius of thedrop, and
α = −220 m1/2 s−1 . (1.6)
If need be, we could call α the medium spherical raindrop fallspeed coefficient. Note thatequation (1.5) is claimed to strictly valid for the rather restricted range of 0.5 mm < R <1 mm. For our pedagogical purposes here, the physics behind (1.5), and its restricted rangeof validity, is of lesser importance.
We will work with the sealevel version of (1.5), with ρair = ρo:
w = αR1/2 (1.7)
Here is method of computation that was described in Section (1.1.2). Let’s try (1.7) withR = 900 µm:
w = −220 m1/2 s−1 (900 µm)1/2 (1.8)
= −220 m1/2 s−1 30 µm1/2 (1.9)
= −220 m1/2 s−1 30(1.0× 10−6 m
)1/2(1.10)
= −6.6 m s−1 (1.11)
If asked to “try” a computation, most of us recognize an expectation to arrive at a simple formfor the units, if for no other reason than to “get full credit”. Though w = 6600 m1/2 µm1/2 s−1
is correct, it is not useful in most applications. To obtain a result with simple units, a decisionmust be made about about whether to express w with units of m s−1 or µm s−1, for example.If we decide on the latter, we could proceed with
w = −6.6 m s−1 (1.12)
= −6.6 m s−1 106µm
1 m(1.13)
= −6.6× 106µm s−1 (1.14)
The above is what we could do if we already had a computation for w with units of m s−1,and, say, a supervisor then asked for the answer in units of µm s−1. If we knew from the

4 CHAPTER 1. UNITS
outset that units µm s−1 would be required, then we could save labor by first converting αto have a unit of µm for the length:
α = −220 m1/2 s−1 (1.15)
= −220 (106µm)1/2 s−1 (1.16)
= −2.2× 105 µm1/2 s−1 (1.17)
We will, of course, arrive at the same answers for w independent of the route we choosefor the unit conversions. Rare indeed is a textbook or lecture in which this 0’th law of unitconversion is stated explicitly or proven.
Now let’s substantiate the claim that the above methods applied to (1.7) are INEFFICIENT.Suppose we had a list of values for R, all in units of µm, and desire a corresponding list of w,all in units of m s−1. We are certainly not going to do the “method of chain-link conversion”,or anything like that, on each computation. We would notice that, though the numbers wemultiply are different in each computation, and computational labor is inescapable, certainsymbolic manipulations associated with unit conversions are always the same. If we seek touse an electronic computer for the calculations using a traditional programming languages,e.g. FORTRAN, then symbolic manipulation of units is not possible (except possibly witha very unorthodox programming style). In order to save labor, and indeed just to be ableto write a program to do the numerical part of the calculation, we use the 0’th law of unitconversion to isolate the common unit conversion as the first step in all the computations,and leave it outside the program:
Letw ≡WDROP m s−1 (1.18)
R ≡ RADIUS µm (1.19)
Substitution into (1.7) yields
WDROP m s−1 = −220 m1/2 s−1 RADIUS1/2 µm1/2 , (1.20)
and using 1 µm = 10−6 m:
WDROP = −0.22 RADIUS1/2 (1.21)
In the Python programming language, the computational chore might be coded in a functionas:
def fallspeed(RADIUS):
# Returns fall speed of drops.
# WDROP is in units of ms^-1 and RADIUS is in microns.
WDROP=-0.22*sqrt(RADIUS)
return WDROP
What does our English language mean when we state that a quantity “is in” a particularunit, as when we write RADIUS is in microns? To state this precisely, we could appeal tothe definition written as:
RADIUS =R
µm(1.22)

1.3. DELAYING UNIT CALCULATIONS 5
and write “RADIUS is the ratio of the radius to the unit of microns”. However, commentswithin computer programs, in documentation, or conversation are more likely to use theshort phrase “is in”.
The method of consolidating unit conversion to the initial part of a calculation is not re-stricted to writing programs. Let’s consider another example, the gas law for dry air:
p = RdρT , (1.23)
where p is pressure, ρ is mass density and T is absolute temperature, andRd = 287 J kg−1 K−1
is the gas constant for dry air. In (1.21), the numerical variables are denoted as characterstrings, consistent with the norms of computer code, but that is not always optimal. On theoccasion that one calculation is needed from (1.23), an experienced scientist may implicitlydefine
ρ =ρ
kg m−3(1.24)
p =p
N m−2(1.25)
T =T
K(1.26)
and see a parallel version of the gas law in his or her mind as
p = 287 ρ T . (1.27)
The experienced scientist may know that when the variables are “in S.I.” (meaning ratiosto standard S.I. units), that the value p that is read from the calculator display impliespressure is p = p N m−2. A “chain-link” method may have been done once, years ago, andyielded a result in units of N m−2 when the inputs were “in S.I.”. The 0’th law of unitconversion implies the result will again have units of N m−2, and the unit calculation isnot repeated. In a lecture setting, there may be an easy morphing between p and p on ablackboard, perhaps leaving students bewildered that units of N m−2 are suddenly tackedon at the end of a calculation.
1.3 Delaying unit calculations
In Section (1.2) we have shown the benefits of putting unit conversion early. However, let’srecognize that putting unit conversion early is not always beneficial.
Let’s recap the two equivalent forms of the sealevel medium spherical raindrop fallspeedequation. Here are (1.7) and (1.6) again:
w = αR1/2 (1.28)
where w is the vertical component of velocity, R is the radius of the drop, and
α = −220 m1/2 s−1 . (1.29)

6 CHAPTER 1. UNITS
Here is (1.21) again, but with single characters, rather than character strings for the nu-merical variables:
w = −0.22 R1/2 (1.30)
where w is the ratio of w to m s−1 and R is the ratio of R to µm. Both of the equivalentforms have two parts: an equation and attached definitions of what is in the equation. Bothforms require approximately the same amount of text.
If asked to express w in terms of the volume of drop V , most of us would certainly turn to(1.28), rather than (1.30) to begin the derivation. Without wanting to impose a restriction,for example, that “V will be in units ml and denoted V, how could we proceed advantageouslyfrom (1.30)? Almost all theoretical development is done “unit-free”, meaning the symbolswe write imply a true statement for any choice of units. Most of us see (1.28) as the superiorform to see in print, in a presentation of the theory of falling raindrops. Before (1.28)can be used in computer program, there must be a recasting of dimensional variables intodimensionless ratios. The consensus in our profession is that this recasting is appropriatelydelayed until the program is written. The theory could eventually be applied to specific dataand units, but unit conversion is delayed to that point. So the “early” of Section 1.2 is still“late”, it is just earlier than the methods of Section 1.1.2.
Here is counter-example from a book about weather prediction models, where an equationis given for the computation of the atmospheric longwave emissivity:
“The downward longwave component is based upon the work of Monteith (1961)who shows that
εa = 0.725 + 0.17 log10wp ,
in which wp is the total column precipitable water in centimeters.”
Within meteorology, there is long history of radiation parameterizations being offered inprescribed units within journal articles. Except for that topic, equations with prescribedunits are rare in print, and such equations are deemed to have done the unit conversion “tooearly”.
1.4 Another Example
Small cloud droplets with a radius R less than 40 microns fall with a speed
w = kR2 (1.31)
where k = −1.00×108 m−1 s−1. Suppose you wanted to convert (1.31) into a form that couldbe programmed into a computer. The line of computer code outputs a number WDROP,defined as w = WDROP mm s−1. The input is a number RADIUS where R = RADIUS mm.What is the formula that you would program?
Suppose R = 0.01 mm. What is WDROP and what is w?

1.5. SUMMARY 7
Answer:
w = kR2 (1.32)
WDROP mm s−1 = −1.00× 108 m−1 s−1 (RADIUS mm)2 (1.33)
WDROP = −1.00× 108 m−1 mm RADIUS2 (1.34)
WDROP = −1.00× 108 m−1 10−3m RADIUS2 (1.35)
So here is the formula:
WDROP = −1.00× 105 RADIUS2 (1.36)
Here is what the line of computer code could look like:
WDROP=-1.0e5*RADIUS**2
Let’s test our formula with R = 0.01 mm.
RADIUS = R mm−1 = 0.01 (1.37)
WDROP = −1.00× 105 × .012 = −0.1 (1.38)
w = WDROP mm s−1 = −0.1 mm s−1 (1.39)
Note again: WDROP = −.1 and w = −0.1 mm s−1. On quizzes, student commonly fail toidentify the distinction between the two.
1.5 Summary
The importance of dimensionless ratios is widely respected in physics. For example, quanti-fying electric charge as a ratio of electric charge to the electric charge of a proton. However,the mathematics of dealing with a ratio of a quantity to a man-made standard unit of mea-surement is given less notice, and less formal teaching. We just hope the students get it.Nevertheless, such ratios are part of our profession, and particularly for the computationsthat we design.
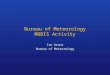
Implicitly, ratios of quantities to units appears throughout our computer programs. Explic-itly, such ratios are familiar to us mainly from labels to graphs, such as in figure 1.1. Theticks mark are pure numbers. Labels with a solidus such as R/µm is orthodox notationfor what the numbers represent. Labels such as R (µm) are understood by us to be NOTconsistent with standard mathematical notation, R is not multiplying µm. Rather, (µm) isa parenthetical remark, shadowing our informality when we say “is in microns”.
The parenthetical labels are most frequent within meteorology textbooks, but An Introduc-tion to Atmospheric Physics by D. G. Andrews uses ratios for labels in graphs throughout thebook. Graphs such as figure 1.1 are analog computers. Dexterity with labels on the axes,written with a solidus, provides a bridge to the programming practice of modern digitalcomputers.

8 CHAPTER 1. UNITS
Figure 1.1: Vertical velocity component w from (1.7), plotted as a function of radius R. Twostyles are shown for labeling the axes.
In an ideal spoken language, we might hope that “know” would not be pronounced the sameway as “no”. In an ideal mathematical language we may wish that R (µm) would nevermean R/µm. But that is the way the languages have evolved, and we must cope with it.

2 Dimensions
A physical quantity is a product of a numerical value and a unit. For example, the depth ofa swimming pool could be h = 60 in. The height of a person could be H = 6 ft. If units havethe same dimension, then a conversion relation exists between those units. For example:
1 ft = 12 in . (2.1)
If quantities have the same dimension, the quantities can be added, subtracted or compared.6 ft− 60 in is a valid computation, 6 ft > 60 in is True. 6 ft− 5 kg and 6 ft > 5 kg are notvalid.
The depth h of a swimming pool will have a dimension of length. Some other dimensionsyou are familiar with are time and mass.
The word dimension is unfortunately overused in science and math. Some have advocatedthat length, time and mass could be called intrinsic qualities rather than dimensions, toavoid confusion. But we are stuck with the multiple uses of the word dimensions. Considerthe velocity vector ~U = uı + v + wk. Does it have 3 dimensions (ı, , k), or 2 dimensions,length and time? The correct answer could be 3 or 2, depending on the context in whichyou are asking the question.
2.1 The dimension extractor
The dimension extractor is [ ], which looks exactly like the familiar grouping brackets, mean-ing those with properties like the ( ). But here we will use [ ] to mean something else. (Justlike the word dimension, it should usually be obvious from the context what [ ] is intendedto mean).
First, the dimension extractor [ ] strips the numerical value from a physical quantity, andleaves just the unit. But there may be options for the unit, and the dimension tells us whatoptions are possible:
[h] = ft or m or in . . . (2.2)
Or we write:[h] = L (2.3)
where L denotes the dimension of length.
9

10 CHAPTER 2. DIMENSIONS
Another example. Let mvr be the angular momentum of a mass in a circular orbit:
[mvr] = [m][v][r] = kg s−1 m2 or g h−1 cm2... (2.4)
or
[mvr] =M T −1 L2 (2.5)
T denotes the dimension of time, and M denotes the dimension of mass.
The dimension extractor has the following simple properties:
[pq] = [p][q] , (2.6)
and for any numerical value n:
[n] = 1. (2.7)
For example:
[6 ft] = [6][ft] = [ft] = L (2.8)
What about [p+ q]?
[p+ q]?= [p] + [q] (2.9)
For example,
[3 ft + 2 s]?= [3 ft] + [2 s]
?= L+ T ?? (2.10)
No, 3 ft + 2 s is undefined, and so is the dimension. p+ q is defined only if [p] = [q], in whichcase
[p+ q] = [p] or [q] (2.11)
2.2 Dimensional homogeneity
For an equation to be valid, all terms (those things separated by +, − and =) must havethe same dimensions, such an equation is called dimensionally homogeneous. Examining thedimensions of terms and factors — in order to determine if the equation is dimensionallyhomogeneous or not — is just one procedure in a broader subject known as dimensionalanalysis.
Bridgman (1969) explains it thus:
The principal use of dimensional analysis is to deduce from a study of the dimen-sions of the variables in any physical system certain limitations on the form of anypossible relationship between those variables. The method is of great generalityand mathematical simplicity.

2.2. DIMENSIONAL HOMOGENEITY 11
2.2.1 Example: diagnosing an invalid coefficient
Recall the medium spherical raindrop equation:
w = αR1/2 (2.12)
But suppose you have forgotten whether α = −220 m1/2 s−1 or α = −220 m−1/2 s−1. Anecessary condition for (2.25) to be valid is that it be dimensionally homogeneous:
[w] = [αR1/2]
LT −1 = [α]L1/2
[α] = L1/2T −1
So α = −220 m−1/2 s−1 is NOT a possibility. That choice would render (2.25) NOT dimen-sionally homogeneous, and invalid.
2.2.2 Example: hydrostatic pressure
Consider some possibilities for an equation that relates the increase in pressure p to depthh below the surface of a swimming pool containing water of density ρ:
(a). p = 2ρgh
(b). p = ρgh
(c). p = ρgh2
We need both sides to have dimensions of pressure. To find the dimensions of pressure, youcan use any valid units for pressure:
[p] = [N m−2] = [N]L−2 =MLT −2 L−2 =ML−1T −2 (2.13)
Next investigate the right-hand sides:
[2ρgh] = [ρgh] = [ρ][g][h]
= [kg m−3][9.81 m s−2][h]
= M L−3 LT −2 L =ML−1T −2
Similarly, [ρgh] =ML−1T −2 and [ρgh2] =MT −2. So (c) is not dimensionally homogeneous.Both (a) and (b) are dimensionally homogeneous. Dimensional analysis can only take us sofar; (b) is the correct equation, but some physics is needed, rather than just dimensionalanalysis, to show that (a) is incorrect.

12 CHAPTER 2. DIMENSIONS
u1
p1
u2
p2
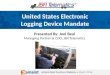
Figure 2.1: Velocity vectors in a flow from a pipe of larger diameter to a pipe of smallerdiameter. Flow speed is u and pressure is p. Upstream values have subscript 1 and downstreamvalues subscript 2.
2.2.3 Example: Bernoulli equation
Consider the Bernoulli equation, which has wide application in meteorology and fluid dy-namics. The simplest application is to pipe flow, as in Figure 2.1. The Bernoulli equationrelates upstream pressure and velocity to downstream pressure and velocity. Later in thiscourse you will learn how to derive the Bernoulli equation. Suppose three students haveattempted to derive the Bernoulli equation and have produced three distinct answers. Sincethe equations cannot all be correct, the students decide to test if some of the derivations areincorrect based on dimensional analysis.
The students ask, which of these equations are dimensionally homogeneous?
(a).p1
ρ+ u1 =
p2
ρ+ u2
(b).p1
ρ+ u2
1 =p2
ρ+ u2
2
(c).p1
ρ+
1
2u2
1 =p2
ρ+
1
2u2
2
Recall
[p] =[N m−2
]= [N]
[m−2
]=[kg m s−2
] [m−2
]= M L T −2 L−2 =M L−1 T −2
[ρ] =[kg m−3
]=M L−3 (2.14)
So [p
ρ
]= [p][ρ]−1 =M L−1 T −2 M−1 L3
= L2 T −2

2.2. DIMENSIONAL HOMOGENEITY 13
This should be obvious:[u] = L T −1
[u2]
= L2 T −2 (2.15)
Consider option (a):p1
ρ+ u1 =
p2
ρ+ u2 (2.16)
This is NOT the way to confirm dimensional homogeneity:[p1
ρ
]+ [u1]
?=
[p2
ρ
]+ [u2] (2.17)
L2T −2 + LT −1 ?= L2T −2 + LT −1 (2.18)
True that it is homogeneous? NO! Symmetrical left and right sides does not make theequation dimensionally homogeneous. All terms must have the same dimensions for anequation to be dimensionally homogeneous. If you still don’t see the problem with (2.16),consider trying to solve for u1, with u2, p1 or p2 specified:
u1 =p2
ρ+ u2 −
p1
ρ(2.19)
Both choices (b) and (c) are dimensionally homogeneous, but only (c) is correct.
2.2.4 Example: Coriolis force
Another example. Let U be windspeed, φ latitude, R radius of Earth, and Ω be the rotationrate of Earth, Ω = 2π
24h(approximately).
Which of the following proposed forms for acceleration a are dimensionally homogeneous?
(a). a = Ω sin(φ)U
(b). a = ΩR sin(φ)U
(c). a = 2Ω cos(φ)U
Only (a) and (c) have all terms with dimensions L T −2. The right side of (b) has dimensionsof L2 T −2. So (b) is not dimensionally homogeneous and cannot produce a valid computation,(a) and (c) do produce valid computations, but are incorrect. The correct equation is not inthe list:
a = 2Ω sin(φ)U (2.20)
2.2.5 Example: drizzle drop
Here is one final example, using a law for the terminal fall speed w of very small drizzledrops of radius R:
w = kR2 . (2.21)
Which of the following proposed forms for k cannot possibly be correct?

14 CHAPTER 2. DIMENSIONS
(a). k = −1.19× 106 cm s−1
(b). k = −1.19× 106 cm−1 s−1
(c). k = −1.19× 106 cm1/2 s−1
For dimensional homogeneity we need:
[w] = [kR2] (2.22)
orL T −1 = [k]L2 (2.23)
[k] = L−1 T −1 (2.24)
Only (b) provides the correct dimensions, so (a) and (c) cannot possibly be correct.
2.3 Summary
In theoretical development of equations, even before we choose units for a calculation in aparticular application, we can check to see whether a calculation with units would actuallybe possible. For example, if the calculation is supposed to produce a speed, the calculationmust produce a physical quantity with units that have dimensions of length divided by time,or L T −1.
Note the following principle of logic:
valid physical law → dimensionally homogeneous equation
The converse is NOT true:
Dimensionally homogeneous equation → valid physical law
The contrapositive of a statement is always true:
Not dimensionally homogeneous equation → not valid physical law
We say dimensional homogeneity is a necessary condition for being a valid physical law, butit is not a sufficient condition. Dimensional inhomogeneity is a sufficient condition for aphysical law to be incorrect.
We close with a reference to what was learned in Chapter 1. Recall that dimensionlessequations can be very useful if the intent is to compute numerical values and to subsequentlyassociate those values with implied, or prescribed, units. Recall the example:
w = −.220R1/2 (2.25)
where R is the ratio of the radius to µm and w is the ratio of the vertical velocity com-ponent to m s−1. But maybe it should be R−1/2 in (2.25)? We cannot say. Working withthese computational dimensionless equations does not allow us to filter out the nonsensicalequations, which is another reason why we stick with the dimensional ones in theoreticaldevelopment.

3 Vectors
We have reviewed that math applied to physics will have quantities involving a numericalvalue multiplying a unit of measure. We learned that the custom in developing a physicaltheory is to delay the choice of units until absolutely necessary, usually to the point of aspecific application and calculation. In the development of a theory, we recognize the quan-tities have the potential to have only certain sort of units, and this potential we call thedimension of the quantity (for a example a velocity, which has dimensions of length per unittime). Dimensional analysis keeps the development on track, requiring dimensional homo-geneity of the equations at each step, thus preventing blunders from entering the theoreticaldevelopment. For example, if dimensional homogeneity was not maintained, a calculationfor a velocity might come out in units of meters.
The proper use of vector methods in theoretical meteorology is analogous to keeping theequations unit-free. We all know vectors have magnitudes and directions (and, in turn, thesevector magnitudes are a numerical value multiplying a unit of measure). In development ofvector theories of any physics, including those in meteorology, the choice of the fundamentaldirections, meaning the unit vectors upon which the vectors are described, is delayed untilthe application to certain data — just as is the choice for the units of measurement. Thisrestriction that vector analysis places on theoretical development is rather subtle, and oftennot highlighted in introductory textbooks.
What follows is an example of the restriction. Let’s suppose a person has come up with aweird dynamical theory, claiming that a parcel of fluid with vorticity vector ~ω and velocityvector is ~U will have an acceleration ~A given by:
~A = ~ω♠~U . (3.1)
The person has found that the theory is quite tidy with this new spade product that isdefined:
~a♠~b ≡ axbxı+ ayby+ azbzk . (3.2)
If you know something about vorticity vectors (which you may not at this point) you mightknow that [~ω] = T −1, and so you can show (3.1) is indeed dimensionally homogeneous. Sofar, so good.
Two vectors go into the spade product and the resultant has direction and magnitude, andis apparently a vector. The spade product is a apparently a vector product, just as is thefamiliar cross product. The spade product is even simpler to compute than a cross product.
15

16 CHAPTER 3. VECTORS
However, vector analysis tells us (3.1) is flawed, even without knowing exactly the dynamicalconsiderations that have been made, and even without knowing what ~ω is. Suppose (3.1)could be confirmed by experiment for a certain parcel of air in a tornado, meaning the equalityholds — the theory is true for that event. However, suppose the same event is analyzed witha set of orthogonal unit vectors with an alternative orientation. In general, equality willNOT hold for (3.1), the equation will not be true. Thus (3.1) is flawed, analogous to beingflawed if it were true for one set of units (for example, with seconds for time) and not truefor a another set (for example, with hours for time).
In contrast, recall from your introductory physics course that the force ~F on a particle withcharge q and velocity ~v as caused by a magnetic field ~B is:
~F = q~v × ~B (3.3)
If (3.3) is true for a particular event, with a particular orientation of the coordinate system,it will be true for all orientations. Maintaining this truth, independent of orientation, is thebeauty of working with the small, well-crafted set of valid vector operations: dot product,cross product, gradient, divergence and curl and so on. The fundamental error of (3.1) is thatit was constructed outside of the set of operations that maintains orientational invariance.
Before we review some valid vector operations, lets review the most rudimentary aspects ofvectors.
3.1 Vectors as lists
Is vector mathematics essential? In the late 1800’s, when vector notation was introduced,some mathematicians didn’t think so. Some claimed that vectors were just dressing upCartesian methods, methods which were quite routine even without vectors. Here we reviewvectors as lists, which nails down some basic rules about working with vectors, but vectorswon’t look very special yet, as per the criticism.
Our math culture allows binary operations on elements other than numbers.
3 + 2 = 5
3 kg + 2 kg = 5 kg
3 ft + 2 in = 38 in
3 kg + 2 in = ERROR
3ı+ 2 = 3ı+ 2
The last example is peculiar: it doesn’t reduce (simplify), but unlike the penultimate exam-ple, it is not erroneous. So why add things together that are not reducible?
Consider this:
1 sandwich = 2 bread + 1 salami (3.4)

3.2. A CHOICE FOR UNIT VECTORS 17
It might be useful to bundle together a list with “+” signs because it provides easy consistencywith the rule that multiplication is distributive over the sum:
3× 1 sandwich = 3× (2 bread + 1 salami)
3× 1 sandwich = 6 bread + 2 salami
Possibly useful for inventory control in a deli. What else?
Another example: A cockroach has velocity:
~v = 4 cm s−1 ı+ 2 cm s−1 (3.5)
How far does the cockroach travel in ∆t = 2s? Answer:
~d = ∆t ~v
= 2 s(4 cm s−1 ı+ 2 cm s−1
)= 8 cm ı+ 4 cm
The unit vectors and arrow symbols don’t add much efficiency. A verbal method is satisfac-tory:
A cockroach walks at 4 cm s−1 toward the east and 2 cm s−1 toward the north.How far...
Surely there must be more to vector analysis than just the efficiency provided by a list.Indeed that will be the case when products of vectors are introduced.
3.2 A choice for unit vectors
We opened this book with a discussion of how our mathematics allows for a choice of unitsof measurement, a very familiar concept. We all know how to represent h = 5 ft in unit ofinches. Less familiar, even for those of us who have studied vectors in a math course, is howto convert a vector from one coordinate system to another.
Let’s define a dot product acting on a unit vector:
ı · ı ≡ 1 . (3.6)
This review of vectors will be comprehensive, at this point you may start fresh and assumethe (3.6) is all you know about the dot product. Here is one thing we notice, the contrastwith:
kg m = kg m , (3.7)
where nothing really happens.
Let’s define some more dot products, and study the consequences:
ı · ı ≡ 1 · ≡ 1 k · k ≡ 1 (3.8)

18 CHAPTER 3. VECTORS
ı · ≡ 0 ı · k ≡ 0 · ı ≡ 0 · k ≡ 0 k · ı ≡ 0 k · ≡ 0 (3.9)
The annihilation of unit vectors in the dot product into just a number makes it a ratherspecial product. (We see later that this operation is called a product because it is distributiveover a sum.) The dot product between unit vectors seems to be asking a question: are youthe same as me or not? With this set of unit vectors being orthonormal, the answer comesout to be 0 or 1, a “no” or “yes”. We have defined three unit vectors. Our experience with ourworld is that it is described with three directions, but the orientation of the three directionscan be chosen freely. Perhaps the unit vectors and dot product invention is begging to beapplied to our conception of space.
We know we can write a vector as
~a = axı+ ay+ azk (3.10)
In this course we will call ax a scalar component of ~a and call axı a vector component of ~a.
We also know that vectors have a pictorial representation (rather overwhelmingly so). Weshould all know how to depict vectors as a sum of the vector components, as in Figure 3.1.However, keep in mind the whole body of vector analysis can be developed without everdrawing a picture, or proving something by referring to a picture. We should be carefulabout convincing ourselves of something being mathematical true based on the pictures thatwe draw. Nevertheless, with vector analysis the pictures are very often used to inspire thenext step in a formal analysis using the symbols. The pictures are very practical.
At this point we have only defined dot products for one set of orthonormal unit vectors.Using those definitions, and assuming the dot product is distributive over a sum, we can findthe scalar components of a vector in one of those directions. For example (this looks trivial):
ı · ~a = axı · ı+ ay ı · + az ı · k = ax . (3.11)
Suppose we construct another set of unit vectors I, J and K, which are rotated from ı, and k by an angle θ about the k axis. We note that if we define
I = cos(θ) ı + sin(θ)
J = − sin(θ) ı + cos(θ)
K = k . (3.12)
We can show I · I = 1 and I · J = 0 and so on. Let’s call I, J and K the uppercase basis. Theuppercases basis has identical dot product properties as the lowercase basis. Neither basisis more fundamental or better than the other.
Suppose we wish to write~a = aX I + aY J + aZK . (3.13)
Suppose the uppercase units vectors are defined, meaning at least we know them in termsof the lowercase basis ı, and k from (3.12). (Perhaps, though it is not required in what

3.2. A CHOICE FOR UNIT VECTORS 19
follows, the lowercase unit vectors have already been assigned certain directions, pointing atcertain stars for example). Here is how we determine the scalar components, using aX as anexample:
I · ~a = aX I · I + aY I · J + aZ I · K = aX (3.14)
but also
I · ~a = [cos(θ) ı + sin(θ) ] ·[axı+ ay+ azk
]= cos(θ) ax + sin(θ) ay . (3.15)
So
aX = cos(θ) ax + sin(θ) ay . (3.16)
Similarly,
aY = − sin(θ) ax + cos(θ) ay (3.17)
and
aZ = az . (3.18)
~a
aY J
aX I
axı
ay
ı
I
Jθ
Figure 3.1: The vector ~a in a plane, with az = 0. Two ways are shown of representing thevector as the sum of orthogonal components.

20 CHAPTER 3. VECTORS
3.2.1 Example: Change of basis
Suppose ~a = 2ı+ 3 and θ = 30 as in Fig. 3.1. Find aX and aY .
I = cos(θ) ı + sin(θ) =√
3/2 ı + 1/2 (3.19)
J = − sin(θ) ı + cos(θ) = −1/2 ı +√
3/2 (3.20)
aX = I · ~a =(√
3/2 ı + 1/2 )· (2ı+ 3) =
√3 + 3/2 = 3.232 (3.21)
aY = J · ~a =(−1/2 ı +
√3/2
)· (2ı+ 3) = −1 + 3
√3/2 = 1.598 (3.22)
~a = 3.232 I + 1.598 J (3.23)
(3.24)
3.3 The dot product and the cross product
Vector mathematics starts to become very efficient with the use of products: the dot product~a ·~b and the cross product ~a×~b. A notation problem here: both of the products are productsof vectors, but the cross product is called the vector product, because it produces a vector.The dot product is called the scalar product because it produces a number, independent ofthe orientation of the unit vectors used to compute it. Such a number is called a scalar.
What follows is a very brief survey of what you will encounter in this course and in futurecourses. In meteorology we have the law for the Coriolis force ~F c:
1
m~F c = ~v × 2~Ω (3.25)
where m is the mass of the blob, ~v is the velocity vector of the blob and ~Ω is the rotationvector for Earth. The Coriolis force does not increase kinetic energy because:
~v · 1
m~F c = ~v ·
(~v × 2~Ω
)= 0 (3.26)
Another example from meteorology: if the equation of motion for a hailstone falling inresponse to gravity ~g and the drag force ~F d is:
md~v
dt= m~g + ~F d (3.27)
then the rate of change of kinetic energy of the hailstone is
d
dt
mv2
2= ~v · ~g m+ ~v · ~F d . (3.28)
In future courses you will learn how to derive the incompressible vorticity equation:
∂~ω
∂t+ ~U ·∇~ω = ~ω ·∇~U +
1
ρ2∇ρ×∇p (3.29)
where ~ω ≡ ∇ × ~U and ~U is the velocity field, but that will require a cross product of anoperator (∇) and a vector, the so-called curl of the vector.

3.3. THE DOT PRODUCT AND THE CROSS PRODUCT 21
3.3.1 The dot product
We have considered the existence of one vector, ~a. Let’s consider another one, a vector ~b:
~b = bxı+ by+ bzk = bX I + bY J + bZK (3.30)
Let’s try an experiment using the dot product definitions for unit vectors, and again assumingthe product is distributive over a sum:
~a · ~b =(axı+ ay+ azk
)·(bxı+ by+ bzk
)= 9 terms, 6 of which are zero
= axbx + ayby + azbz (3.31)
Similarly
~a · ~b =(aX I + aY J + aZK
)·(bX I + bY J + bZK
)= aXbX + aY bY + aZbZ (3.32)
The dot product formula for computation is identical in either basis:
multiply like components and add them together
Evidently this formula produces the same number ~a · ~b in any orthonormal basis. The dotproduct is indeed special. Let’s also consider a nonsensical scalar product (meaning theproduct of two vectors that produces a number). We define a love product:
~a♥~b = axby + aybz + azbx . (3.33)
In general, we will usually find that
axby + aybz + azbx 6= aXbY + aY bZ + aZbX . (3.34)
For example, try the simple case of ~a = I = cos(θ) ı + sin(θ) and ~b = J = − sin(θ) ı +cos(θ) : (3.34) produces cos2(θ) 6= 1. If you wanted me to use a physical theory that usesthe love product, you would also need to tell me the restricted coordinate system in whichthe theory works. No such restriction applies to the dot product.
If you still have doubts that ~a ·~b produces that same number in any coordinate system, hereis something that looks like a proof:
aXbX + aY bY = [cos(θ) ax + sin(θ) ay] · [cos(θ) bx + sin(θ) by]
+ [− sin(θ) ax + cos(θ) ay] · [− sin(θ) bx + cos(θ) by]
= 8 terms, 4 of which cancel
=[cos2(θ) + sin2(θ)
]axbx +
[cos2(θ) + sin2(θ)
]ayby
= axbx + ayby

22 CHAPTER 3. VECTORS
Whatever ~a · ~b is representing, it must be something independent of the coordinate sys-tem. What is it? Can we make a statement about the dot product, independent of thecomputational formula?
Here is something else that is independent of the coordinate system:
~b · ~b = b2x + b2
y + b2z
= b2X + b2
Y + b2Z
≥ 0
We define~b · ~b ≡ b2 (3.35)
or
b =√~b · ~b . (3.36)
We say b is the magnitude of ~b, the length of the arrow in the Pythagorean representation
of the vectors. We also write b =∣∣∣~b∣∣∣.
Can we define ~a · ~b in terms of the magnitudes of ~a and ~b . . . and something else? Let’strust our three-dimensional intuition about vectors and trust that we can always orient kso that both k · ~b and k · ~a = 0 (two vectors determine a plane and lie in a plane). Given~b = bxı and by, we can always find a θ such that bx = b cos(θ) and by = b sin(θ) , so~b = b cos(θ) ı+ b sin(θ) .
bxı = b cos(θ) ı
by = b sin(θ) ~bı
θ
Figure 3.2: If the θ is angle between ~b and ı, then b =√b2x + b2
y, bx = b cos(θ) andby = b sin(θ) .
Similarly, we can write ~a = a cos(φ)ı+ a sin(φ) for an angle φ that can be determined from

3.3. THE DOT PRODUCT AND THE CROSS PRODUCT 23
ax and ay.
~a · ~b = [a cos(φ)ı+ a sin(φ)] · [b cos(θ)ı+ b sin(θ)]
= ab [cos(φ) cos(θ) + sin(φ) sin(θ)]
= ab cos(φ− θ)= ab cos(Θ) (3.37)
Here we have defined Θ = φ − θ. We call Θ the angle between ~a and ~b. Being defined
Θ
φ
θ
~a
~b
ı
Figure 3.3: The dot product can be computed independent of using any particular coordinatesystem. The dot product can be expressed in terms of the magnitudes of a and b and the angleΘ between them: ~a · ~b = ab cos Θ
as a difference, this angle will independent of the orientation of the basis vectors. We havealso used a trigonometric identity cos(φ− θ) = cos(φ) cos(θ) + sin(φ) sin(θ). A proof of thisimportant trigonometric identity is given in Section 4.2.2. Thus
~a · ~b = ab cos(Θ) (3.38)
is a geometric interpretation, which means an interpretation independent of the coordinatesystem. Though the computational form for the dot product is still useful:
~a · ~b = axbx + ayby + azbz , (3.39)
the orientational invariance in that form is not so obvious.
By the way, not all authors employ a consistent notation for subscripts on vectors. Ratherthan x . . . or X . . . as subscripts, you might also see
~a · ~b = a1b1 + a2b2 + a3b3 (3.40)
Number subscripts are advantageous because they imply a generality, not a specific coordi-nate system. But many introductory textbooks use x . . . for subscripts.

24 CHAPTER 3. VECTORS
3.3.2 The cross product
Perhaps you are not yet impressed by the vector math that has been reviewed so far. Nextwe include a cross product into our vector tool set, which will provide us a complete tool setfor some useful applications.
Let’s invent another binary operation on two vectors, the cross product, starting from scratch.Now since we are calling it a product, we must be declaring that it is distributive over a sum:
~a× (~b+ ~c) = ~a× ~b+ ~a× ~c (3.41)
We define the following 9 resultant vectors:
ı× ı = ~0 ı× = k ı× k = −× ı = −k × = ~0 × k = ı
k× ı = k× = −ı k× k = ~0 (3.42)
~a× ~b = (axı+ ay+ azk)× (bxı+ by+ bzk)
= axbxı× ı+ axby ı× + 7 more terms
= (aybz − azby )ı+ (azbx − axbz )+ (axby − aybx)k
=
∣∣∣∣∣∣ı kax ay azbx by bz
∣∣∣∣∣∣ (3.43)
Suppose we choose to work with:
~a = aX I + aY J + aZK (3.44)
~b = bX I + bY J + bZK (3.45)
We have two options for computing the cross product:
~c = ~a× ~b = (aybz − azby )ı+ (azbx − axbz )+ (axby − aybx)k
or~c = ~a× ~b = (aY bZ − aZbY )I + (aZbX − aXbZ)J + (aXbY − aY bX)K
Is the cross product independent of which coordinate system is used to compute it? Certainlythe scalar component cX will be a different number than cx and so on. But suppose we take~c, computed with the uppercase basis, and then calculate cx = ı · ~c, and compare with thecx that results from the lowercase computation. Are they the same? Yes they are, and thecross product is unique in this regard, very special, and in fact it is THE vector productbecause no other vector product can be constructed, that isn’t based on the cross product!The nonsensical spade product (3.2) is a case in point: it is not based on the cross productand resultant vector depends on the coordinate system used to compute it.
We may suspect the cross product, like the dot product, should have a description indepen-dent of the coordinate system. What is it? To answer that question efficiently, we will firstdevelop the vector identities.

3.4. VECTOR IDENTITIES 25
3.4 Vector identities
What is an identity? Here is a mathematical identity (true for all θ):
cos2(θ) + sin2(θ) = 1 . (3.46)
Contrast that with a mathematical equation (may be true for some θ, which you may beinvited to solve for):
cos(θ) = 1 (3.47)
Here is a vector identity, something true for all ~a and ~b:
~a · (~a× ~b) = 0 (3.48)
Proof:
~a× ~b = (aybz − azby )ı+ (azbx − axbz )+ (axby − aybx)k (3.49)
~a · (~a× ~b) = (3.50)
= ax(aybz − azby) + ay(azbx − axbz) + az(axby − aybx) (3.51)
= axaybz − axaybz + axazby − axazby + ayazbx − ayazbx (3.52)
= 0 (3.53)
(By the way, the above proof is just as general as if we used 1, 2 and 3 for subscripts, insteadof x,y, and z.) Similarly,
~b · (~a× ~b) = 0 (3.54)
We have presented the geometrical interpretation of the dot product and know the dotproduct is independent of the coordinate system. So what does
~a · (~a× ~b) = 0 ~b · (~a× ~b) = 0 (3.55)
tell you about the cross product? Does it say something about the cross product thatis independent of the coordinate system? Does it say something about the geometricalinterpretation of ~a × ~b? (By the way, if you attempt similar dot product discoveries withthe spade product (3.2), and will never find any).
Here are some simple identities for you to prove, by writing out the vectors in componentform, and using commutative, distributive and associative laws (some of the laws we explicitlystated earlier — dot products with a unit vector being distributive over a sum — others havebeen assumed, and are known to you from math class).
~a+ ~b = ~b+ ~a (3.56)
~a · ~b = ~b · ~a (3.57)

26 CHAPTER 3. VECTORS
And of course keep this one in mind, the vector product does have this quirk:
~a× ~b = −~b× ~a . (3.58)
Here is an identity with three vectors, an identity about the triple scalar product:
~a · (~b× ~c) = ~c · (~a× ~b) . (3.59)
Here is tip for the proof of (3.59): six terms = six terms.
The triple vector product:
~a× (~b× ~c) = ~b(~a · ~c)− ~c(~a · ~b) . (3.60)
proof method: expand the left side to 12 terms and the right side to 18 terms. Eventuallyshow that the left hand side and right hand side are equal.
The quadruple scalar product:(~a× ~b
)·(~c× ~d
)=(~b · ~d
)(~a · ~c)−
(~a · ~d
)(~b · ~c
)(3.61)
This is a bit more fun to prove. The proof uses known vector identities: First let ~e ≡ ~a×~b.(~a× ~b
)·(~c× ~d
)= ~e · (~c× ~d) (3.62)
= ~c · (~d× ~e) (3.63)
= ~c ·(~d×
(~a× ~b
))(3.64)
= ~c ·(~a(~d · ~b)− ~b(~d · ~a)
)(3.65)
= (~c · ~a)(~d · ~b
)−(~c · ~b
)(~d · ~a
)(3.66)
=(~b · ~d
)(~a · ~c)−
(~a · ~d
)(~b · ~c
)(3.67)
You will often see vector operations without the superfluous parentheses:
~a× ~b · ~c× ~d = ~b · ~d ~a · ~c− ~a · ~d ~b · ~c (3.68)
The above can only yield a valid computation as (3.61). A special case of (3.61) is where
~c = ~a and ~d = ~b: (~a× ~b
)·(~a× ~b
)=
(~b · ~b
)(~a · ~a)−
(~a · ~b
)(~b · ~a
)(3.69)
= b2a2 − a2b2 cos2(Θ) (3.70)
= a2b2(1− cos2(Θ)) (3.71)
= a2b2 sin2(Θ) (3.72)

3.4. VECTOR IDENTITIES 27
Thus we have a statement about the magnitude of ~a× ~b:∣∣∣~a× ~b∣∣∣ = ab| sin(Θ)| (3.73)
where Θ is the angle between the vectors.
We previously have shown ~a× ~b is orthogonal to ~a and ~b.
All that is left to show is ~a×~b obeys a right-hand rule, and the geometric interpretation ofthe cross product would be complete. However, this review will fall short of convincing youthat ~a × ~b obeys a right-hand rule, except by stating that the unit-vector cross productsobey the right-hand rule by definition.
The right-hand rule is quite subtle. How would you explain to somebody on Mars (perhaps anastronaut who has a mild case of amnesia because of oxygen deprivation resulting from spacesuit malfunction) which hand is their right hand? Well, send them a photo of right-hand andtell them to try configuring either hand to match the image, the one that matches best is theright hand. But suppose you only had verbal transmission, what are your options? If youknow where the person is on Mars, you could ask them to confirm that a certain constellationis overhead, tell them to stand and face toward another particular constellation, and thentell them that at third constellation is on their right. Right-hand rules can only be shownby example. If your (x, y, z) coordinate system can be obtained by a smooth (and oftenimagined) rotation of a known right-handed (x, y, z) coordinate system, without ripping outand inverting an axis, then your coordinate system is also right-handed.
3.4.1 Completeness of the dot product and cross product
Here we investigate the claim that cross products and dot products are the only productsthat can occur in a orientationally invariant equation, and the only ones that we need. Theproof here will give you a good workout with the rules of dot products and cross products.Some important proofs in theoretical meteorology are not much longer than this, thoughthose proofs also use the slightly larger toolbox of vector calculus. If you can do this proofwell, think of yourself as being “half way there” to being a theoretical meteorologist.
Consider this invention:
The diamond product ~a♦~b is a vector product which has the magnitude of thecross product, but is tilted 45toward ~a, away from the cross product.
The claim here is that such a geometric definition can be satisfied with a construction usingcross products and dot products.
~d = ~a♦~b =1√2
(~a× ~b+ |~a× ~b|
~a
|~a|
)(3.74)
(Recall | | is defined in terms of a dot product).

28 CHAPTER 3. VECTORS
In order to prove the consistency of (3.74) with the geometrical definition, the followingnotation is useful:
~c = ~a× ~b a =~a
|~a|(3.75)
So 3.74 can be written:~d =
1√2
(~c+ ca) (3.76)
See if you can cite the appropriate vector identities to justify the following steps:
~d · ~d =1
2(~c+ ca) · (~c+ ca) (3.77)
d2 =1
2(~c · ~c+ ca · ~c+ ~c · ca + ca · ca) (3.78)
=1
2
(c2 + 0 + 0 + c2a · a
)(3.79)
=1
2
(c2 + c2
)= c2 (3.80)
d = c (3.81)
Here is the rest of the “proof”:
~d =1√2
(~c+ ca) (3.82)
~d · ~a =1√2
(~c+ ca) · ~a (3.83)
=1√2
(~c · ~a+ ca · ~a) (3.84)
=1√2
(0 + ca) (3.85)
=1√2ca =
1√2da (3.86)
The dot product of the vectors yields the angle between them:
~d · ~ada
= cos(Θ) =1√2. (3.87)
Thus Θ = 45. But is that tilt “toward ~a, away from the cross product”? We take that tomean that ~d must be in the plane defined by ~c and ~a, meaning ~d had no component normalto that plane:
~d · (~c× ~a) =1√2
(~c+ ca) · (~c× ~a)
=1√2
(~c · ~c× ~a+ ca · ~c× ~a)
= 0 (3.88)

3.5. THE GRADIENT 29
Thus it is proven.
Thus we have demonstrated that the geometric properties of the diamond product be con-structed with the cross product and dot product. Here is the subtle point: the diamondproduct is not distributive, and isn’t really a product, it’s just a binary operation. In gen-
eral, ~q♦(~s+~t
)6= ~q♦~s+ ~q♦~t. Diamond product R.I.P.
3.5 The gradient
There is a big wonderful world of using the ∇ operator in vector analysis. Here we reviewonly one application of ∇, to produce a gradient vector. Consider a scalar field p(x, y, z).You are welcome to interpret p as “pressure”, indeed the pressure gradient is an extremelyimportant vector in meteorology.
The gradient is desired to have the following property. For any displacement vector d~s, thechange in p across that displacement will be given by the following dot product:
dp = d~s ·∇p (3.89)
The geometric definition of the dot product yields some principles about the gradient
dp = |d~s| |∇p| cos(Θ) . (3.90)
For a given magnitude of |d~s|, dp is greatest when d~s is aligned with ∇p. So we say thatthe ∇p points in the direction of the most rapid change of p, and |∇p| is the rate of changeof p with distance in that direction.
In Cartesian coordinates, d~s = dxı+ dy+ dzk, so we must have
∇p = ı∂p
∂x+
∂p
∂y+ k
∂p
∂z(3.91)
in order to produce consistency with the definition of partial derivatives:
dp = d~s ·∇p =∂p
∂xdx+
∂p
∂ydy +
∂p
∂zdz . (3.92)
Now in polar coordinates (which are reviewed in Chapter 10), d~s = drr + rdθθ, so we musthave:
∇p = r∂p
∂r+ θ
1
r
∂p
∂θ. (3.93)
Students often mistakenly drop the factor of 1r
in (3.93). Keep in mind that the gradient,and the components, represent a rate of change with distance, and rdθ is how distance varieswith θ in polar coordinates.

30 CHAPTER 3. VECTORS
3.6 Summary
The summary for this chapter on vector analysis is perhaps best stated by:
It is a profoundly erroneous truism, repeated by all copy-books and by eminentpeople when they are making speeches, that we should cultivate the habit ofthinking of what we are doing. The precise opposite is the case. Civilizationadvances by extending the number of important operations which we can performwithout thinking about them.
Alfred North WhiteheadAn Introduction to Mathematics, 1911

4 Elementary functions
Here we review the elementary functions exp(x), sin(θ) and cos(θ). This review also servesas a review of differential calculus in general, and not just of the elementary functions. Notonly does the review touch upon the chain rule, product rule, etc., but it also covers somecalculus techniques essential to dynamical meteorology: the derivative along a path througha field, and the derivation of conservation laws.
4.1 The exponential function
-2 -1 0 1 20
1
2
3
4
5
6
7
8
x
f(x) = ex
f Let’s start fresh and assume only the fol-lowing about a function f(x):
d
dxf(x) = f(x) f(0) = 1 (4.1)
The solution to that equation may alreadybe known to you: f(x) = ex. But the in-tent here is to “start fresh”.
What about dimensional homogeneity? Well, we are in “math book land” now, and x isassumed to be dimensionless, not something with a unit of measure. You may also knowthat if the (4.1) is written as df = fdx, we see that in dx, f will increase by an amountproportional to itself. Maybe you can also prove that for ∆x = 1, f will at least double.
With only those definitions in (4.1), and before we know anything else about f(x) or itsknown solution ex, let’s prove a property of our unknown function f(x). We investigate theproduct f(x)f(y) for two distinct numbers x and y. In this experiment, suppose x = a + zand y = b− z. If we hold a and b fixed, and vary z, how would f(x)f(y) vary? For example,
31

32 CHAPTER 4. ELEMENTARY FUNCTIONS
how does f(4)f(3) compare with f(4.1)f(2.9)? Is it smaller, larger or the same? Let
P (z) ≡ f(a+ z)fb− z) . (4.2)
Here is the experiment:
dP
dz=
df(x)
dzf(y) + f(x)
df(y)
dz(4.3)
=df(x)
dx
dx
dzf(y) + f(x)
df(y)
dy
dy
dz(4.4)
= f(x)dx
dzf(y) + f(x)f(y)
dy
dz(4.5)
= f(x)f(y)− f(x)f(y) (4.6)
= 0 . (4.7)
Thus P (z) is constant, meaning independent of z. Therefore P (z) = P (0) for all z. For thespecial case of z = b we have
f(a+ b)f(b− b) = f(a)f(b) . (4.8)
From (4.1), f(0) = 1, so:f(a+ b) = f(a)f(b) . (4.9)
This is the exponentiation identity. As you know, both f(x) = 2x and f(x) = 10x obey(4.9), but are either the solution to (4.1)? At this point, all we know is that the solution isf(x) = ex for some number e, yet to be determined.
Somebody clever discovered that ddx
exp(x) = exp(x) where:
exp(x) = 1 + x+x2
2+x3
3!+x4
4!+ ... (4.10)
You can verify that claim with:
d
dx
(1 + x+
x2
2+x3
3!+x4
4!+ ...
)= 1 + x+
x2
2+x3
3!+x4
4!+ ... (4.11)
Thus the solution to (4.1) is f(x) = exp(x). If x is very large, you may need to add manyterms together before the series converges in (4.10). If we believe that (4.1) has a uniquesolution (indeed, mathematicians tell us that is the case), then we know exp(x) = ex. Forlarge x, computing ex may be more fruitful than using (4.10), but we still need to determinethe elusive number e.
For x = 1, exp(1) = e1 = e, and we find our important number e:
e = exp(1) =∞∑n=0
1
n!= 1 + 1 +
1
2+
1
6+
1
24+ . . . = 2.71828 . . . . (4.12)
Note that e is not required to model exponential growth. Suppose the number of influenzacases n are said to growing exponentially in time t. We could model n(t) as either n(t) = n2
λt

4.1. THE EXPONENTIAL FUNCTION 33
or n(t) = nekt. In the former, we can speak of the doubling time 1/λ. With the latter,
we speak of a clumsy “e-folding” time 1/k. Wouldn’t the use of 2 as the standard base formodeling exponential growth be cleaner? What is the fascination with e? As we shall seelater, the answer to that question is that e makes the notation for differential equations abit more economical.
4.1.1 The Exponential Function in Differential Equations
For constant A and k:
dv
dt= kv ↔ v(t) = Aekt (4.13)
Prove it once, use it often.
Here is the proof, Given v(t), we show dvdt
= kv:
dv
dt=
d
dt
(Aekt
)=
dA
dt
(ekt)
+ Ad
dt
(ekt)
= Ad
dtekt . (4.14)
Now let u ≡ kt.
dv
dt= A
d
dtekt
= Ad
dteu
= Ad
dueudu
dt
= Ad
dueud
dt(kt)
= Aeuk
= Aektk
= kv . (4.15)
Thus it is proven.
By the way,v(0) = Aek0 = A . (4.16)
Thus the constant A is v(0), but often we use the succinct symbol
v ≡ v(0) . (4.17)

34 CHAPTER 4. ELEMENTARY FUNCTIONS
We pronounce v as “vee naught”. We often write the solution to dvdt
= kv as
v(t) = vekt . (4.18)
Note we have provendv
dt= kv ← v(t) = ve
kt . (4.19)
But what aboutdv
dt= kv → v(t) = ve
kt ? (4.20)
This is a question of uniqueness. Mathematicians prove it by showing that there are NOother possible solutions other than ve
kt.
Suppose we know the number γ such that eγ = 2. You can verify from (4.10) that γ =0.693147.
v(t) = vekt = ve
γ ktγ = v (eγ)
ktγ = v2
ktγ . (4.21)
Sodv
dt= kv ↔ v(t) = v2
λt where λ =k
γ. (4.22)
We see (4.22), as a statement, is longer than (4.13), it still uses a peculiar number (γ ratherthan e), and the constant that appeared in the ODE, k, is not the constant that multipliest in the exponent. So we join the rest of the world and model our exponential growth withthe peculiar number e as the base for the exponent.
4.1.2 The inverse of the exponential function
The inverse of the exponential function, the natural logarithm function ln defined as:
α = exp(x)↔ ln(α) = x . (4.23)
Here it is again, with different symbols (we need this for the addition formula):
β = exp(y)↔ ln(β) = y . (4.24)
The principle property of the natural logarithm function can now be derived:
αβ = exp(x) exp(y) = exp(x+ y) .
Then,ln(αβ) = ln(exp(x+ y)) = x+ y = ln(α) + ln(β) . (4.25)
This identity finds wide use in mathematics:
ln(αβ) = ln(α) + ln(β) . (4.26)
By the way, in the previous section γ = ln(2).

4.2. TRIGONOMETRIC FUNCTIONS 35
0 Π 2 Π 3 Π 4 Π-1
0
1
t
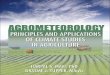
Figure 4.1: red: cos(t). blue: sin(t).
4.2 Trigonometric functions
We begin with a “triangle-free” investigation of the trigonometric functions, based on calcu-lus. We start fresh and assume only the following:
d
dtf(t) = g(t) f(0) = 0 (4.27)
d
dtg(t) = −f(t) g(0) = 1 (4.28)
The solutions to (4.27)-(4.28) may already be known to you: f(t) = sin(t) and g(t) = cos(t).But the intent here is to “start fresh”.
Let’s put aside for later the application of the trigonometric functions to triangles. Thatapplication is just one of many applications of the trigonometric functions that occurs withinmeteorology. For example, if f is eastward velocity and g is northward velocity, then (4.27)-(4.28) will forecast an inertial oscillation. Can we solve the above equations for f(t) andg(t), meaning from (4.27) and (4.28) can we discover enough to allow us to plot f(t) andg(t) as a function of t?
Let’s imagine for the moment that we are stymied in the quest for f(t) and g(t), and don’trecognize that f(t) = sin(t) and g(t) = cos(t) are the solutions to (4.27) and (4.28). Ourfeigned ignorance will be useful because in our quest for f(t) and g(t), using calculus, we

36 CHAPTER 4. ELEMENTARY FUNCTIONS
can recover much about trigonometry in just a few pages. Our first step in the quest is thediscovery of a conservation law lurking behind the system (4.27) and (4.28). An analogousdiscovery of conservation laws happens frequently in theoretical meteorology.
Investigate
h(t) = g2(t) + f 2(t) (4.29)
dh
dt=
d
dtg2(t) +
d
dtf 2(t)
= 2g(t)dg
dt(t) + 2f(t)
df
dt(t)
= −2g(t)f(t) + 2f(t)g(t)
= 0
Thus h(t) is constant, and h(t) = h(0):
h(0) = g2(0) + f 2(0) = 1 · 1 + 0 · 0 = 1 (4.30)
So
g2(t) + f 2(t) = 1 (4.31)
So f(t) and g(t) are certainly bounded, they must lie in the range between -1 and 1. Wheng(t) has large magnitude, f(t) has small magnitude, and so on . . . . But for a certain t, whatare the numbers f(t) and g(t)?
4.2.1 A graphical calculator
Suppose we plot in our familiar Cartesian plane x = g(t) and y = f(t). At this point inthe analysis, t is just a parameter; we don’t know what t would represent in the Cartesianworld. We do know from (4.31) that for all t, the points will lie on a unit circle
x2 + y2 = 1 (4.32)
As t progresses uniformly, x and y may jump all over the unit circle, based on what we havedeveloped here. So what value of t corresponds to which (x, y)? We know one point: fort = 0, (x, y) = (1, 0).

4.2. TRIGONOMETRIC FUNCTIONS 37
dx
dsdy
How do the points x(t) and y(t) progress from (1,0) ast varies? If the points are plotted out as a path, whatis the length s(t) of the path? For small dx and dy, thechange in the path length ds with t is
ds =√
(dx)2 + (dy)2
=
√(dx
dt
)2
(dt)2 +
(dy
dt
)2
(dt)2
=
√(dg
dt
)2
(dt)2 +
(df
dt
)2
(dt)2
= dt
√[−f(t)]2 + [g(t)]2
= dt
f(t) s
g(t)
1
t
So we have now established the important fact:
s = t , (4.33)
(having used the condition that s = 0 at t = 0). Onlynow do we have a geometric interpretation of t: t is thearc length s along the unit circle. Traditionally, the arclength along a unit circle also defines the measure of thecentral angle t.
We can bring our feigned ignorance to a close now. If we use θ for the symbol of the centralangle, we recognize that in traditional symbols f(θ) = sin(θ) and g(θ) = cos(θ) . What we“discovered” from (4.27)-(4.28) is that the traditional functions for the opposite and adjacentsides to an angle in right triangle with a unit hypotenuse are the solutions:
sin(θ) θ
cos(θ)
1
θ
d
dθsin (θ) = cos (θ) sin (0) = 0 (4.34)
d
dθcos (θ) = − sin (θ) cos (0) = 1 (4.35)
cos2(θ) + sin2(θ) = 1 (4.36)
If necessary, we could now make a crude graphical calculator to compute sin(θ) and cos(θ) ,with a ruler to measure x and y and a piece of string to measure arc length s, or equivalentlya protractor to measure θ. But the nature of our graphical calculator tells us some precisethings too. sin(θ) and cos(θ) will be periodic with period 2π: for example sin(θ + 2π) =sin(θ). We also “see” that cos(−θ) = cos(θ) and sin(−θ) = − sin(θ).

38 CHAPTER 4. ELEMENTARY FUNCTIONS
4.2.2 Trigonometric identities derived from calculus
A few more trigonometric identities will expedite our ability to compute values sin(θ) andcos(θ) for any θ. Of course, these identities also have wide applications outside of any taskto simply compute sin(θ) and cos(θ) . For example, we already saw an application in (3.37).
We investigate the quantity
P ≡ cos (θ) cos (φ)− sin (θ) sin (φ) . (4.37)
Let θ = a+ z and φ = b− z. With a and b fixed, how would P (z) vary with z?
dP
dz=
∂P
∂θ
dθ
dz+∂P
∂φ
dφ
dz
= (− sin(θ) cos(φ) − cos(θ) sin(φ) )d(a+ z)
dz
+ (− cos(θ) sin(φ) − sin(θ) cos(φ) )d(b− z)
dz= 0 . (4.38)
So P is independent of z. For all z, P (z) = P (0).
cos (a+ z) cos (b− z)− sin (a+ z) sin (b− z) = cos (a) cos (b)− sin (a) sin (b) . (4.39)
For the case z = b, and using cos (0) = 1 and sin (0) = 0 from (4.35) and (4.34), we have
cos (a+ b) = cos (a) cos (b)− sin (a) sin (b) . (4.40)
Of course, we can use our comfortable angle symbols θ and φ for the arguments of thefunctions:
cos (θ + φ) = cos (θ) cos (φ)− sin (θ) sin (φ) . (4.41)
With calculus, the proof has been rather effortless, if you recall what is required to prove(4.41) by drawing triangles.
The derivative of (4.41) with respect to θ produces another useful identity with ease. Wewill need this application of the chain rule:
d
dθcos (u) =
d
ducos (u)
du
dθ= − sin (u)
du
dθ(4.42)
Using (4.42) on the left hand side of (4.41):
d
dθcos (θ + φ) =
d
dθ[cos (θ) cos (φ)]− d
dθ[sin (θ) sin (φ)]
− sin (θ + φ) = − sin (θ) cos (φ)− cos (θ) sin (φ) . (4.43)
sin (θ + φ) = sin (θ) cos (φ) + cos (θ) sin (φ) (4.44)

4.2. TRIGONOMETRIC FUNCTIONS 39
From (4.41) and (4.44) we derive half-angle identities, for example
cos
(θ
2
)= ±
√1 + cos(θ)
2. (4.45)
If we know cos (π/4) we can calculate cos (π/8), and so on. In principle, we make progresswith (4.41) and (4.44) to calculate cos(θ) and sin(θ) for any θ. But we need to be evenmore clever to calculate sin(θ) and cos(θ) efficiently — look up CORDIC in the Wikipediato see how your cheap calculator does it for you by an iterative procedure.
You may already know how to confirm that the following infinite series are solutions to (4.34)and (4.35):
sin(θ) = θ − 1
3!θ3 +
1
5!θ5 − . . . (4.46)
cos(θ) = 1− 1
2θ2 +
1
4!θ4 − . . . (4.47)
These series are somewhat useful for computing sin(θ) and cos(θ), but not as efficient asCORDIC. More likely, (4.46) and (4.47) find use in various approximations, for example asin (13.3).
4.2.3 Trigonometry with Euclidean Faith
θ4
1φ θ′
8
2φ′
You have been taught that the above triangles are similar, and you are supposed to deducethat θ′ = θ and φ′ = φ. This is supposed to be true even if the lengths on the rightwere marked 8 × 1012 and 2 × 1012 (m, km, your choice). This assumption is essential intrigonometry: θ is determined by ratios of lengths, absolute lengths do not influence θ. Thesum of the angles of triangle, no matter how big the triangle, sum to 180. The is whatBertrand Russell in his Essay on the Foundation of Geometry calls “Euclidean faith”. Allmeteorologists have Euclidean faith, and you are advised to also have Euclidean faith.
θ′
x
h yφ′

40 CHAPTER 4. ELEMENTARY FUNCTIONS
Some expositions of trigonometry begin with the following as definitions. With our Euclideanfaith, we thus accept as universal:
sin(θ) =y
hcos(θ) =
x
htan(θ) =
y
xθ = sin−1
(yh
). . . (4.48)
There are some simple trigonometry problems that can be solved with the above raw def-initions. For example, finding the height of a flag pole y from the length of its shadow xand knowledge of the sun elevation angle θ. More general triangle problems can be solved ifwe derive some theorems about trigonometry in the realm of triangles (with Euclidean faithand Pythagorean faith). Here is the reminder of how the proofs go:
θ
b
a
c
Law of Cosines
c2 = (a− b cos(θ) )2 + (b sin(θ) )2
= a2 − 2ab cos(θ) + b2 cos2(θ)
+b2 sin2(θ)
= a2 − 2ab cos(θ) + b2 (4.49)
BA
a
L
b
Law of Sines
L = b sin (A) = a sin (B) (4.50)
sin (A)
a=
sin (B)
b(4.51)
4.2.4 Trigonometric functions and oscillations
We end with a triangle-free application, the applications trigonometric functions to oscilla-tions. Investigate z(t) = A cos (θ) with θ = ωt where t is now time (dimension T ) , ω is theangular frequency, and A is the amplitude. A and ω are assumed to be constants:
z(t) = A cos (ωt) (4.52)
The first derivative is proportional to sin(ωt):
dz
dt=
dz
dθ
dθ
dt= − sin(θ) ω
= −ω sin (ωt) (4.53)

4.3. SUMMARY 41
The second derivative is proportional to − cos(ωt), and thus proportional to −z:
d2z
dt2= −ω2 cos (ωt) = −ω2z (4.54)
Thus we have discovered a second order differential equation, the equations for simple har-monic motion for which z = cos(ωt) is a solution:
d2z
dt2= −ω2z (4.55)
The traditional introductory application for (4.55) is to a mass on a spring. Within me-teorology, we find many applications in which the restoring force on a displacement (andthus the acceleration of the displacement) is proportional to the displacement, which leadsto oscillatory motion.
0 Π 2 Π 3 Π 4 Π-A
0
A
ωt
Aco
s(ωt)
1 ωd dtA
cos(ωt)
=−A
sin(ωt)
1 ω2
d2
dtA
cos(ωt)
=−A
cos(ωt)
Figure 4.2: A cos(ωt) and its first derivative (blue) and second derivative (green), which is thenegative of the zero derivative.
4.3 Summary
For a meteorology course, we have presented quite a few proofs of pure math topics. Cer-tainly all professionals need to simply “trust the mathematicians” most of the time, meaningtrust the standard techniques and identities have been proven to be true. Nevertheless, in

42 CHAPTER 4. ELEMENTARY FUNCTIONS
the sequence of dynamical meteorology courses will encounter many proofs and derivations.The methods and logic involved used here are similar to what is used when we manipu-late meteorological equations. Furthermore, in those meteorological equations we certainlycannot avoid expertise with exp, sin and cos (even if we do forget the details in these proofs).

5 Review of Newtonian Mechanics
Did you sell your big, thick physics textbook back to the bookstore? If so, you may wantto buy one back, especially if the quiz here stumps you. The quiz is easy, in the sense thatit does not use either the breadth or depth of our review of mathematics. The math is notdifficult. That being said, the quiz is difficult, because only a small fraction of the population,even a university population, can do physics problems such as these. The vast majority don’tknow what concepts to apply to solve the problem, or they don’t know how to apply theconcept. If you do poorly on the quiz, you may be a member of the vast majority. You mayneed to remedy your deficiencies before you attempt to learn atmospheric dynamics.
What does it mean to do poorly? If you must peek at the answers to solve the problems,then you have done poorly. If you merely convince yourself that you can memorize suchanswers for an exam, you are not really remedying your deficiencies.
(The remainder of the course will blend the math review with physics).
5.1 A quiz of elementary problems
You are invited to administer the quiz to yourself. Answers appear in the subsequent section.
(1) A truck accelerates from rest,with acceleration of a = 1 m s−2.After 10 s, how far has the truckgone?
43

44 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
(2) A mass of 1 kg is suspended in achain of other masses. What is thedifference in the magnitude of theforce of tension in the string abovethe mass, minus that in the stringbelow?
(3) A child slides down a friction-less slide, decreasing in altitude bya distance h. What is the speed vof the child at exit?
(4) Two frictionless skaters push offeach other. As a result, the 100 kgskater is moving at 3 m s−1. Howfast is the 50 kg skater moving?

5.1. A QUIZ OF ELEMENTARY PROBLEMS 45
(5) A child sits at r = 3 m fromthe center of a merry-go-round.The merry-go-round has as angularfrequency of ω = 2 rad s−1. Whatis magnitude of the child’s acceler-ation?
(6) In the previous problem,what is the direction of the child’sacceleration?
(7) If the merry-go-round hasangular frequency of ω = 2 rad s−1,what is the period of rotation τ?
(8) A wet towel of mass m is inthe spin cycle of a washing machine,spinning with angular frequency ω.The radius of the basin is r. Whatis the force of the basin on the wettowel?
(9) A block slides down a friction-less plane inclined at angle θ fromthe horizontal. What is the magni-tude of the acceleration?

46 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
(10) A pendulum of length L is dis-placed a distance x from the verti-cal. What is the magnitude of theacceleration?
(11) A truck accelerates forwardwith acceleration ~a. A beer can islose in the back of the truck. Inthe reference frame moving with theback of the truck, in what directionis the inertial force on the beer can?
(12) A cylinder of fluid of constantdensity has angular frequency of ω1
about its axis. The cylinder thenstretches from length h1 to lengthh2 = 2h1, but no external torqueoccurs about the axis. Find ω2.
5.2 Answers to the quiz
(1) The distance travelled is the average velocity multiplied by the elapsed time. For constanta, starting from rest, the average velocity is the average of the starting and ending velocity,or 1
2at. The distance travelled is 1
2at2 = 50 m .

5.2. ANSWERS TO THE QUIZ 47
(2) There is no vertical acceleration, the net vertical force is zero. Defining the positivedirection to be upward:
ma = F = Ttop − Tbottom −mg = 0
Ttop − Tbottom = mg = 9.8 N
(3) The potential energy is reduced by mgh, and is converted to kinetic energy:
mgh =mv2
2
v =√
2gh
(4) There are no external forces in the horizontal. Horizontal momentum of the system willbe conserved, and remain at a value of 0: m1v1 + m2v2 = 0. Let positive v be to the right.Subscript 2 is the 50 kg skater:
v2 =−m1v1
m2
= 6 m s−1
(5) a = ω2r = 12 m s−2
(6) Toward the center.
(7)
ω ≡ 2π
τ
τ =2π
ω=
2π
2 rad s−1= π s
(8) F = ma and in this case F = mω2r, toward the center. (But if the towel is stuck to thedrum, with friction holding it up, a upward force of friction must be balancing the force dueto gravity).
(9) The component of gravity aligned downward along the plane is g sin θ, and with nofriction that is also a.
(10) The component of gravity in the direction of motion is g sin θ, where θ is the angle ofdeflection. For |θ| << 1, sin θ ≈ x/L. So the answer is
gx
L
(11) Toward the back of the truck.
(12) The moment of inertia of a cylinder of mass m and radius r is I = 12mr2. Conservation
of angular momentum is I1ω1 = I2ω2. With mass and density conserved, so is volume:πr2
1h1 = πr22h2.
ω2 =I1
I2
ω1 =r2
1
r22
ω1 =h2
h1
ω1 = 2ω1

48 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
5.3 Some mechanical theorems
Section 5.1 presented one common way we do physics: we use knowledge of the basic con-cepts, concepts that can applied quantitatively with only elementary algebraic manipulation.For many people, concepts of conservation of momentum, energy, angular momentum, ac-celeration in circular motion, and so on, can be effectively learned and applied without anytheoretical connection between the concepts.
For better or worse, the curriculum in atmospheric dynamics requires more than just knowl-edge of disparate meteorological concepts. Although mere application of such concepts —qualitatively, with software, or with a formula — may be very productive, students are ex-pected to know how to derive the meteorological formulas and concepts. By derive, we meanbuild a body of meteorological theory from fundamental laws of physics. Even if derivingsuch concepts does not figure largely in the student’s career plans, the hope is that derivationprocess will lead to more productive application of the concepts.
What follows is some theoretical physics: a way of “doing physics” quite distinct from theway in the quiz. Some theorems are developed concerning the interaction of a system of twomasses. The theorems are about aspects of the aggregate motion: derivation of the equationof motion for the center of mass and a prognostic equation for angular momentum about thecenter of mass. Though the derivations are formally restricted to two masses for notationalsimplicity, the derivations could easily be generalized to a system of many particles. Asgeneralized to many particles, the theorems actually underlay all of fluid mechanics, thetheory upon which dynamical meteorology is based. However, those derivations withindynamical meteorology that proceed from these theorems will often employ the mathematicsof vector fields, and use the gradient, curl and divergence operators. Here our derivationsuse simpler vector mathematics, employing nothing more complicated than time derivativesof vectors and the cross product.
So we start with something conceptually simple. You may wish to conceive of the two objectsof mass m1 and m2 as binary stars, interacting by the force of gravity, and embedded withina galaxy. Or, they could be two molecules of water interacting by electrostatic forces. Hereare the individual equations of motion (m~a = ~f) for the position vectors ~r1 and ~r2:
m1d2~r1
dt2= ~f 12 + ~f ext
1 (5.1)
m2d2~r2
dt2= ~f 21 + ~f ext
2 (5.2)
~f 12 is the force of 2 on 1, ~f ext1 is the sum of all the forces on 1 from objects external to the
system. Likewise for ~f 21 and ~f ext2 .
Assuming Newton’s third law, we require:
~f 12 = −~f 21 (5.3)
and further require the force be directed between the objects:
~f 12 × (~r1 − ~r2) = ~0 . (5.4)

5.3. SOME MECHANICAL THEOREMS 49
Note that Newton is usually not credited with stipulating (5.18), and he certainly couldnot have used a cross product, because it wasn’t invented yet. Trivially, we have a calculusdefinition of what it means for the mass of the objects to be constant:
dm1
dt= 0
dm2
dt= 0 . (5.5)
We denote the total mass of the system as:
M ≡ m1 +m2 (5.6)
Looking ahead, we also introduce a definition of the position vector ~R for the center of mass:
M ~R ≡ m1~r1 +m2~r2 (5.7)
5.3.1 Equation of motion for the center of mass
Let’s investigate the behavior of the momentum vector ~P of the system:
~P = m1d~r1
dt+m2
d~r2
dt. (5.8)
In particular, we investigate how ~P may change:
d~P
dt= m1
d2~r1
dt2+m2
d2~r2
dt2(5.9)
d~P
dt= ~f 12 + ~f ext
1 + ~f 21 + ~f ext2 (5.10)
d~P
dt= ~f ext
1 + ~f ext2 (5.11)
d~P
dt= ~F ext (5.12)
where we have used Newton’s third law (5.3), ~f 12 + ~f 21 = 0 and defined the total externalforce as:
~F ext ≡ ~f ext1 + ~f ext
2 . (5.13)
Furthermore, using definition of the center of mass (5.7) in (5.9) allows an equation of motionof the system to have the same form as a point mass:
Md2 ~R
dt2= ~F ext (5.14)
Indeed, our starting point of individual “objects” of mass m1 and m2 may well have eachbeen systems (and were, if you accepted the invitation to conceptualize them as binary stars).So, we know that if the position vector of an object is defined as the position of the centerof mass, the equation of motion will only have external force effecting the acceleration, justas if it were an idealized point mass.

50 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
5.3.2 Angular momentum about the center of mass
The position of the masses m1 and m2 can be defined relative to the position of the centerof mass:
~r1 = ~R+ ~r′1 ~r2 = ~R+ ~r′2 . (5.15)
Using (5.15) in (5.1) and (5.2) gives:
m1d2~r′1dt2
= ~f 12 + ~f ext1 −m1
d2 ~R
dt2(5.16)
and
m2d2~r′2dt2
= ~f 21 + ~f ext2 −m2
d2 ~R
dt2. (5.17)
Substitution of (5.15) in (5.18) gives
~f 12 × (~r′1 − ~r′2) = ~0 . (5.18)
Substitution of (5.15) into (5.7) provides a simple lemma:
m1~r′1 +m2~r
′2 = ~0 . (5.19)
The lemma is a statement that, using the center of mass as the origin of a coordinate system,the position of center of mass relative to the center of mass is ~0. Trivial indeed, but we willuse (5.19) to expedite the following derivation.
As we did with ~P , let’s posit another vector worthy of investigation:
~L′ = ~r′1 ×m1d~r′1dt
+ ~r′2 ×m2d~r′2dt
(5.20)
~L′ is the angular momentum vector about the center of mass. Roughly speaking, ~L′ isnormal to the plane of rotation about the center of mass, and has a greater value the largerthe masses, the faster the objects move orthogonal to the position vector from the center ofmass (note the cross product), and the greater the distance from the center of mass.
Let’s explore how ~L′ may change in time:
d~L′
dt=
d~r′1dt×m1
d~r′1dt
+ ~r′1 ×m1d2~r′1dt2
+d~r′2dt×m2
d~r′2dt
+ ~r′2 ×m2d2~r′2dt2
(5.21)
= ~0 + ~r′1 ×m1d2~r′1dt2
+ ~0 + ~r′2 ×m2d2~r′2dt2
(5.22)
= ~r′1 ×
(~f 12 + ~f ext
1 −m1d2 ~R
dt2
)+ ~r′2 ×
(−~f 12 + ~f ext
2 −m2d2 ~R
dt2
)(5.23)
= (~r′1 − ~r′2)× ~f 12 + ~r′1 × ~f ext1 + ~r′2 × ~f ext
2 − (m1~r′1 +m2~r
′2)× d2 ~R
dt2(5.24)
= ~0 + ~r′1 × ~f ext1 + ~r′2 × ~f ext
2 + ~0 (5.25)
= ~r′1 × ~f ext1 + ~r′2 × ~f ext
2 (5.26)

5.3. SOME MECHANICAL THEOREMS 51
In deriving (5.26) from (5.24), we have used (5.18) and (5.19) to identify the vector products
that are ~0. We have found that internal forces cannot generate ~L′. In the absence ofexternal forces, ~P and ~L′ would be conserved. Importantly, certain types of external forcesmay generate ~P but not ~L′. For example, if the external forces are caused by a uniformgravitational field ~g (such as we are familiar with in representing gravity near the surface of
the Earth) with ~f ext1 = m1~g and ~f ext
2 = m2~g, then (5.19) applied to (5.26) shows
d~L′
dt= ~r′1 ×m1~g + ~r′2 ×m2~g (5.27)
= (m1~r′1 +m2~r
′2)× ~g (5.28)
= ~0 (5.29)
Think of two balls connected by a string, tossed through the air: ~P will be changing but ~L′
will be invariant.
In the theory of meteorology (and fluids) we have a very important vector related to rotationcalled vorticity, often denoted ~ω. Certain types of forces will not effect ~ω, and the prognosticequation for vorticity will be very useful for predicting “what happens next” in the weather.Happily, using the proper tools of vector calculus, the derivation of the prognostic vorticityequation will be about the some length as the derivation of our equation for d
dt~L′ = 0, but
that derivation does not appear until next semester.

52 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
5.4 Newton’s legacy in the scientific method
What constitutes a valid theory in atmospheric dynamics? The story of Newton’s theory ofgravity is good place to start, an exemplar of the modern scientific method leading to a usefultheory. Similar standards of “good science” are in place today, but there are some differences,mainly because we know so much more today. You likely will not be able to emulate Newtonand claim your meteorological observations result from a hitherto misunderstood universalforce, that you have now brought to light in its correct form.
This section also reviews some basic astronomy. In an introductory meteorology course likethis, the astronomical facts often never get far from Earth: the Earth rotates about its axisin about one day, the Earth has a certain radius and a certain gravity.
A bit more astronomy is warranted. The rotation of the Earth is an acceleration, andso introduces inertial forces into our analysis of atmospheric dynamics. But what aboutthe other accelerations, for example the acceleration of the Earth towards the sun? Mostmeteorologists will tell you that it is not important, but won’t be able to say why, andprobably cannot quantify the effect. In this course, we will be able to say why it is notimportant. Not only that, we will also be able to say why the acceleration of the Earthtoward the sun is important in the dynamics of the oceans but not in the atmosphere, a factwhich flummoxes meteorologists. But we need some basic astronomical knowledge in orderto make those judgements.
At one time, meteorology and astronomy were one subject. All in the heavens that wasregular was astronomy, all that was irregular was meteorology. Perhaps the history of oursubject is another reason to know a bit of astronomy.
Lastly, Newton’s law of gravity can be an extension of the previous quiz. After reading thenext section, can you answer (close the book); “Given knowledge of the acceleration due togravity at the Earth’s surface g, the radius of the Earth, and the distance from the Earthto the Moon, derive the period of the Moon’s orbit about the Earth”. If you cannot answerthat question, you will have difficulty with the questions of dynamical meteorology.
5.4.1 The Moon and the apple
Newton conjectured that the acceleration a of both the Moon and the apple were caused bythe same inverse square law of gravity:
a =k
d2(5.30)
k is a constant and d is the distance between the center of the spherical objects.
If the conjecture is true, then:
aMoon
aApple
=
kR2EM
kR2E
=R2E
R2EM
(5.31)

5.4. NEWTON’S LEGACY IN THE SCIENTIFIC METHOD 53
where RE is the radius of the Earth and REM is the distance from the center of the Earthto the center of the Moon. Since aApple = g is known:
aMoon = gR2E
R2EM
(5.32)
The question Newton asked is: Is the observed centripetal acceleration of the moon consistentwith this prediction? To answer this question, Newton needed to know the value of REM .The saga of how that value was known in Newton’s time is summarized below.
Figure 5.1: Even you can make casual observations (with no instruments) of the position of thesun relative to a half-lit moon and show that φ is close to 90. Aristarchus of Samos deducedφ = 87. In fact φ = 8950′.
A child observing the moon from a moving car may notice the angular position of the moonis not changing, and may exclaim “The moon is following me!”. As we mature, we quitenaturally know another interpretation of that observation. Rather than moon being justbeyond the trees, and moving with car, it could be be very far way and not moving. Buthow far away? Ancient people on travels to different latitudes (or sharing records fromdifferent latitudes) may have noticed that the path of the moon through the stars was nearlyindependent of latitude, and its size in sky appeared the same in all places, and have cometo the conclusion that REM >> RE.
From Fig. 5.1, we see how we can also rather easily deduce RES >> REM , where RES isthe distance from the center of the Earth to the center of the sun. Thus, with the sun beingfar away, the rays will be nearly parallel over the whole Earth (except for the fact that thesun is not a point source). Presuming parallel rays, Eratosthenes was able to determine theradius of the Earth RE by noting that on a special day when a vertical pole at Syene cast noshadow, at Alexandria the sun would never get closer than 7 to vertical. With the distancefrom Syene to Alexandria being known by careful surveying, the distance per latitude couldbe determined. This is equivalent to determining RE. Actually, latitude locations could beknown easily from star positions, such as the elevation angle of the North Star. The shadowobservation wasn’t really necessary for Alexandria and Syene, but the historical record saysthat is what was used. The key is to have to have accurate distance and latitude differencesknown between two sites, and for the two sites to be due north/south of each other.
If the stars are assumed to be even farther from the Earth than the sun, parallax can bededuced from simultaneous photos of the moon, as in Fig. 5.3, and REM can be deduced.

54 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
Figure 5.2: Eratosthenes deduces the radius of the Earth, close to the modern value of RE =6.38× 106 m.
For the ancients, synchronizing time for such remote simultaneous observations would havebeen very difficult. But an eclipse in ancient times provided an opportunity to study lunarparallax, as in Fig. 5.4.
Figure 5.3: Composite of simultaneous photos of the moon, showing the position of the moonrelative to the Pleaides constellation.
Deductions of REM from the eclipse were consistent with the value Newton assumed: REM =60RE. Newton knew the Earth’s gravitational acceleration acting on the moon aMoon wouldcause centripetal acceleration:
aMoon = ω2REM =
(2π
T
)2
REM (5.33)

5.4. NEWTON’S LEGACY IN THE SCIENTIFIC METHOD 55
Figure 5.4: Hipparchus determined REM from fortuitous observations of an eclipse, for whichjournals recorded the amount of sun covered at two different locations.
Newton solved for the period of orbit T that would be consistent with aMoon:
aMoon = gR2E
R2EM
=
(2π
T
)2
REM (5.34)
T 2 =(2π)2R3
EM
gR2E
=(2π)2R3
EMRE
gR3E
(5.35)
T 2 =(2π)2603RE
g(5.36)
The calculation predicts the period of the moon’s orbit T to be:
Ttheory = 2.25× 106 s× 1 day
86400 s= 27.26 day (5.37)
The observed value of T is:Tobserved = 27.32 day (5.38)
Well, the rest is history. When Newton died in 1727, a poet Alexander Pope proposed theepitaph:
Nature and Nature’s laws lay hid in night; God said, ‘Let Newton be!’ And Allwas Light.
Newtonian dynamics was certainly an improvement over Aristotle, who had claimed:
• In the absence of any force an object comes to rest immediately.
• To explain the flight of an arrow, he was obliged to attribute motive as well as resistivepowers to a medium.
• Thus the arrow is propelled by the air collapsing in behind it and so transmitting, theforce exerted by the living agent who drew the bow.
Certain this Aristotelean dynamics cannot predict anything, is untestable, irrefutable andtherefore unscientific. (And I have read that this bit of Aristotelean dynamics did not receivefavorable peer review even in Aristotle’s lifetime).
In Newton’s time, Aristotle’s physics was yielding to the Cartesians, but they too objected tothe inverse square law for gravity. Cartesians advocated that a whirlpool of fluid in contact

56 CHAPTER 5. REVIEW OF NEWTONIAN MECHANICS
with the planets propelled them in their orbits. The inverse square law seemed to be anoccult force. In response to the Cartesians objections, Newton said it wasn’t really his jobto explain what causes gravity, only that his theory works:
I have not as yet been able to discover the reason for these properties of gravityfrom phenomena, and I do not feign hypotheses. For whatever is not deducedfrom the phenomena must be called a hypothesis; and hypotheses, whether meta-physical or physical, or based on occult qualities, or mechanical, have no place inexperimental philosophy. In this philosophy particular propositions are inferredfrom the phenomena, and afterwards rendered general by induction.
–Isaac Newton
As triumphant as we recognize Newton to be, in our own times we cannot emulate Newton.You could not be awarded a Master of Science degree in which you posit a new force toexplain your tornado observations, even if it fits your few observations very well. Today weact like Cartesians: meteorology must be consistent with known universal force laws. Wewould never overthrow known paradigms based on a data set as small as observations ofmotion of one moon and one apple. But the historical record shows Newton predicted morethan just the period of the moon’s orbit with the inverse square law, he also predicted theelliptical shape of an orbit, adding confirmation to his theory for the inverse square law. Atheory for tides also followed from the inverse square law (in Newton’s lifetime) and provedto be consistent with observed properties of tides.

6 The one-dimensional equation of mo-tion
The equation of motion for the center of mass:
~F = m~a (6.1)
With velocity ~v written as~v = vxı+ vy+ vzk (6.2)
and with unit vectors defining an inertial, Cartesian reference frame,
~a ≡ d~v
dt=
dvxdtı+
dvydt+
dvzdt
k . (6.3)
~F = m~a, ~a = 1m~F , presents three differential equations:
dvxdt
=1
mFx
dvydt
=1
mFy
dvzdt
=1
mFz (6.4)
Fx could depend on time, the position in space, and all the velocity components:
Fx = Fx(x, y, z, vx, vy, vz, t) (6.5)
In some situations: Fx = Fx(x, vx, t). We have a differential equation that is uncoupled(independent) from the others:
dvxdt
=1
mFx(x, vx, t) (6.6)
We drop the subscripts and write the force per unit mass as a(x, v, t):
dv
dt= a(x, v, t) (6.7)
a(x, v, t) is usually given by force laws. The ultimate goal is to find both v(t) and x(t) forfuture times, given knowledge of x(0) and v(0).
With v(t) known, we find x(t) with:dx
dt= v(t) (6.8)
We consider a(x, v, t) in the following forms:
57

58 CHAPTER 6. THE ONE-DIMENSIONAL EQUATION OF MOTION
• constant a (gravity)
• a(t) (programmed mechanical device)
• a(v) (drag forces)
• a(x) (springs)
• a(x, v) (damped springs)
6.1 constant a
dw
dt= −g dz
dt= w (6.9)
Spotting the anti-derivatives of the right-hand-sides is easy:
w(t) = −gt+ w (6.10)
z(t) = −1
2gt2 + wt+ z (6.11)
You may combine
z(t) = −1
2gt2 + wt+ z (6.12)
with the solution for x(t)
x(t) = vt+ x (6.13)
to get the classic parabolic cannonball trajectory.
6.2 a = a(t)
Problems with specified a(t) are a bit contrived, and are likely describing a mechanical device.Here is an example:
• A car starts from rest, meaning v(0) = 0, at x(0) = 0.
• For t > 0, the acceleration is specified to be a(t) = A sin(ωt) where A is a constant.
• Find v(t) and x(t).
• For ωt >> 1, give a good approximation for x(t).

6.3. A = A(V ) 59
ω2
Ax(t)
ω
Av(t)
1
A
dv
dt
5 10 15 20-5
5101520
ωt
dv
dt= A sin(ωt) (6.14)
has solution
v(t) = − 1
ωA cos(ωt) + C . (6.15)
With v(0) = 0, C = 1ωA, and
v(t) = − 1
ωA cos(ωt) +
1
ωA (6.16)
v(t) = − 1
ωA cos(ωt) +
1
ωA (6.17)
The solution of dxdt
= v with x(0) = 0:
x(t) = − 1
ω2A sin(ωt) +
1
ωAt
=A
ω2[− sin(ωt) + ωt]
For |ωt| >> 1, the last term dominates, and x ≈ Aωt.
6.3 a = a(v)
6.3.1 drag force proportional to v
v(t)v
kt
Consider a drag force proportional to v:
dv
dt= −kv (6.18)
We know this solution
v(t) = ve−kt (6.19)
With dxdt
= v,
x(t) =
∫ve−ktdt+ C (6.20)

60 CHAPTER 6. THE ONE-DIMENSIONAL EQUATION OF MOTION
x(t)x(∞)
kt
which is
x(t) =−1
kve−kt + C (6.21)
In the case where x(0) = 0, C = vk
, and
x(t) =vk
(1− e−kt
)(6.22)
Note: limt→∞ x(t) = vk
.
6.3.2 drag force proportional to v2
v(t)v
vKt
Consider a frictional force proportional to thesquare of v2:
dv
dt= −Kv2 . (6.23)
We assume v(0) = v0 > 0 and x(0) = 0 and finda solution valid for t > 0.∫
−1
v2dv =
∫Kdt+ C (6.24)
which is1
v= Kt+ C (6.25)
v =1
Kt+ C(6.26)
With
v(0) =1
C= v0 (6.27)
the solution is
v(t) =1
Kt+ 1v0
. (6.28)
Kx(t)
vKt
With dxdt
= v
x(t) =
∫1
Kt+ 1v0
dt+ C (6.29)
or
x(t) =1
Kln
(t+
1
Kv0
)+ C . (6.30)

6.3. A = A(V ) 61
Kx(t)
vKt
Curiously, x(t) looks dimensionally inhomoge-neous. However when we determine C in
x(t) =1
Kln
(t+
1
Kv0
)+ C (6.31)
the result then confirms to be dimensionally ho-mogeneous. With x(0) = 0,
C = − 1
Kln
(1
Kv0
)=
1
Kln (Kv0) (6.32)
and
x(t) =1
Kln (v0Kt+ 1) . (6.33)
Note limt→∞ x(t) =∞ .

62 CHAPTER 6. THE ONE-DIMENSIONAL EQUATION OF MOTION
6.4 a = a(x)
Common in modeling the natural world and in engineering.
6.4.1 A spring
The archetypal equation in this class is that for a mass on a spring:
mdv
dt= −kx , (6.34)
where m and k are constants, the mass and spring constants. We write (6.34) as a second-order O.D.E. for x(t):
d2x
dt2+ ω2x = 0 (6.35)
with
ω2 ≡ k
m(6.36)
We should recall from memory the general solution:
x(t) = A cos(ωt) +B sin(ωt) (6.37)
The constants A and B could be determined from initial conditions x(0) = x and dxdt
(0) = v.
x(0) = x = A cos(ω0) +B(sinω0) = A (6.38)
dx
dt= −ωA sin(ωt) + ωB cos(ωt) (6.39)
dx
dt(0) = v = −ωA sin(ω0) + ωB cos(ω0) = ωB (6.40)
B =vω
(6.41)
Sox(t) = x cos(ωt) +
vω
sin(ωt) (6.42)
Such spring equations commonly arise when there is a slight imbalance between two large,opposing forces, which is certainly very common in meteorology. For example, consider amass on a spring suspended from the ceiling. Let z be the vertical coordinate and w be theupward velocity component. Let z = 0 be the level of the hook on the end of the spring,before a mass is attached. The equation of motion is:
md2z
dt2= −mg − kz (6.43)
We find the equilibrium position ze:
0 = −mg − kze (6.44)

6.4. A = A(X) 63
Orze = −mg
k(6.45)
Let x(t) be the vertical displacement from the equilibrium position:
z(t) = ze + x(t) (6.46)
Substitution into (6.43) yields:
md2
dt2(ze + x) = −mg − k (ze + x) (6.47)
which leaves an equation independent from g:
md2x
dt2= −kx (6.48)
6.4.2 A comet
Here is another example of a = a(x).
A comet moving on a straight-line path to or from the sun could obey:
dv
dt= −GM
x2(6.49)
which is the same asd2x
dt2= −GM
x2. (6.50)
The solution of (6.50) for x(t) is beyond the scope of this course. But extracting informationabout v(x), rather than x(t), is relatively easy. First, multiply all terms by v, or its equivalentdxdt
:
vdv
dt= −GM
x2
dx
dt(6.51)
Using the chain rule, this can be written as
d
dt
v2
2=
d
dt
GM
x(6.52)
ord
dt
(v2
2− GM
x
)= 0 (6.53)
d
dt
(v2
2− GM
x
)= 0 (6.54)
which impliesv2
2− GM
x= E = constant (6.55)

64 CHAPTER 6. THE ONE-DIMENSIONAL EQUATION OF MOTION
The energy per unit mass E remains invariant. The relation v(x) implied in the above allowsfor a number of useful calculations to be made. Consider two values of x on the trajectory,x1 and x2. Let v1 ≡ v(x1) and v2 ≡ v(x2). With both
v21
2− GM
x1
= E (6.56)
andv2
2
2− GM
x2
= E (6.57)
we havev2
1
2− GM
x1
=v2
2
2− GM
x2
(6.58)
For a comet starting from x1 →∞ with v1 → 0 and impacting a planet of radius x2 = R:
0 + 0 =v2
2
2− GM
R. (6.59)
Orv2
2
2=GM
R(6.60)
There is no requirement that position x1 precedes position x2 in time. v2 could also be thevelocity required for a projectile shot from an isolated planet to coast off to infinity, with thevelocity gradually becoming vanishingly small. Thus v2 is also the so-called escape velocity.
6.4.3 The spring again
Multiply both sides of the spring equation (6.34) by v or its equivalent:
mvdv
dt= −kxdx
dt(6.61)
d
dt
(1
2mv2 +
1
2kx2
)= 0 (6.62)
This implies1
2mv2 +
1
2kx2 = E = constant (6.63)
where E is again energy, now particular for the mass on a spring. E is known from initialconditions x(0) and dx
dt(0). Even without knowing trigonometric functions can be used to
solve for x(t), we could use
1
2mv2 +
1
2kx2 = E = constant (6.64)
to solve for things like:
• the maximum value of |v|, which occurs when x = 0
• the maximum value of |x|, which occurs when v = 0

6.5. A = A(V,X) 65
6.5 a = a(v, x)
The damped harmonic oscillator:
mdv
dt= −bv − kx (6.65)
where b and k are constants. First derive an energy equation, which puts bounds on what ispossible for v(t). Knowing these bounds may help us to avoid mistakes in finding solutionsfor v(t) and x(t).
mvdv
dt= −bvv − kxdx
dt(6.66)
ordE
dt= −bv2 (6.67)
where E is again the sum of kinetic and potential energy:
E =1
2mv2 +
1
2kx2 . (6.68)
From (6.67), With b > 0, E will decrease whenever the object is moving, since v2 ≥ 0.
We move on to find v(t) and x(t) from (6.65), which we can trivially rearrange as:
mdv
dt+ bv + kx = 0 . (6.69)
This can also be written asd2x
dt2+ 2γ
dx
dt+ ω2
x = 0 (6.70)
where
γ ≡ b
2m(6.71)
ω2 ≡
k
m(6.72)
(We recognize ω as the frequency that would actually occur if γ = 0). So we move directlyto finding x(t). We propose a solution
x(t) = Ae−σt cos(ωt+ φ) (6.73)
Substitution into (6.70) yields:
(ω20 − 2γσ + σ2 − ω2)e−σt cos(ωt+ φ) + (2σω − 2γω)e−σt sin(ωt+ φ) = 0 (6.74)
This will be true for all values of t only if
2σω − 2γω = 0
ω20 − 2γσ + σ2 − ω2 = 0

66 CHAPTER 6. THE ONE-DIMENSIONAL EQUATION OF MOTION
The above have a solution
σ = γ
ω2 = ω2 − γ2
Provided that ω2 − γ2 > 0, (meaning the damping is small compared to the spring force), a
solution to (6.70) is:
x(t) = Ae−γt cos(ωt+ φ) (6.75)
with
ω =√ω2 − γ2 . (6.76)
x(t)x
ωt
Figure 6.1: x(t) = Ae−γt cos(ωt+ φ) with γ = .1ω and φ = 0.
In the case where ω2−γ2 < 0, we propose a solution x = Aeλt to (6.70), and find the λ must
solve:
λ2 + 2γλ+ ω2 = 0 . (6.77)
Analysis of (6.77) as a quadratic, show two solutions are possible for λ, both negative, thusboth representing exponential decay. In order to satisfy initial conditions, a solution to (6.70)will usually require a linear combination of both solutions, as in Figure (6.2).
The case of large damping or γ >> ω is insightful for identifying the which terms aredominant in the two separate solutions for λ. In meteorology, we very often have the situationof identifying and neglecting an insignificant term in an equation of motion, resulting in amuch more tractable analysis — the analyis of this damped osicllator provides an excellentdemonstration of how to make these beneficial approximations.
A large magnitude of decay gives the possibility that there is a close balance of the first twoterms in (6.77) or (6.70):
λ1 ≈ −2γ . (6.78)
The represents viscous drag rapidly decaying some initial inertia, with the spring force irrel-evant.

6.5. A = A(V,X) 67
The second solution for λ is smaller magnitude, and is given by a close balance of the lasttwo terms in (6.77) of (6.70):
λ2 ≈ −ω2
2γ. (6.79)
This represents a balance between the viscous drag and the spring force, with inertia beingirrelevant.
x(t)A
ωt
Figure 6.2: A solution to (6.70) with γ = 4ω and x(0) = 0 and v(0) 6= 0. x(t) = −Ae−λ1t +Ae−λ2t . Solution of (6.77) gives λ1 = −7.87ω and λ2 = −0.127ω, close to the approximateforms cited in the text. See the initial momentum rapidly decay, and the spring slowly pull themass back towards x = 0.

7 Pressure
7.1 A force per unit area
The pressure force of a fluid (air being a fluid) on a surfaceresults from the impact of the molecules, which transfer mo-mentum. The pressure force onto a small patch of area ∆A is~F = −p∆An, where p in pressure and n is the normal vectorfrom the patch, pointing at the fluid exerting the pressure.In air, the molecules have speed close to the speed of sound,
which at 0 C is 330 m s−1. You should be able to imagine that our innocent air, of massdensity ρ = 1 kg m−3, even with no wind, would still exert enormous pressure against asurface. Fortunately, many of our practical surfaces (walls, doors, roofs) have nearly thesame pressure on both sides.
The rule about pressure forces being anti-normal to a fluid surfacealso applies to a fluid surface of any blob embedded within thefluid. Only external forces accelerate the center of mass of a blob.The force of sub-blob A on sub-blob B cancels out the force ofsub-blob B on sub-blob A (as in the figure on the right). Thevector sum of external pressure forces on the surface of the blob
(such as on the patch in the figure on the left) is what contributes to the acceleration of theblob.
A vertically oriented barometer is measuring the weight ofair above the barometer. The center of mass of a columnof air above this piston barometer has an acceleration muchless that g, even when significant meteorological events areoccurring above the barometer. The air exerts a force on thesurface of the piston, and the piston surface exerts the sameforce on the base of the column of air. The force of the pistonon the air nearly balances the weight of the entire column ofatmosphere.
68

7.2. THE PRESSURE GRADIENT FORCE 69
Having learned the above barometer is functioning as a scale,students are often surprised that the sideways barometer isstill functioning as a scale, and measuring the weight in acolumn (of cross-sectional area the same as the piston) abovethe barometer. But how could it be otherwise? You are well-trained in calculating pressure at a point using p = RρT , and
knowing that pressure is a force per unit area. Surely you have never been told that thereis more than one value of air pressure at a certain point, with different values being useddepending on the orientation of a surface adjacent to the point. The fact that the forceon the piston is independent of the orientation of the piston says something very profoundabout the isotropic nature of the molecular motion, in a gas such as air.
7.2 The pressure gradient force
In this section we quantify how pressure differences accelerate parcels (blobs) of a fluid. Weultimately show the force per unit volume is simply proportional to the pressure gradient.Although that proof is not difficult, we first put aside the calculus and become acquaintedwith typical atmospheric pressure differences, the masses accelerated by those differences,and the resulting acceleration.
Consider a blob the shape of a rectangular prism,embedded in a synoptic-scale cyclone. The netforce in the x-direction is:
Fx = A p(x)− A p(x+ ∆x)
= A [p(x)− p(x+ ∆x)] (7.1)
Suppose ∆x = 1000 km = 106 m. Suppose thepressure difference is 10 mb = 10 hPa = 1000 Pa = 1000 N m−2. By the way, 90 hPa is thetypical excess pressure in your lungs, when you blow your nose. Normal exhalation, whileat rest (sitting in a lecture), only requires excess pressure of 4 hPa. The 10 hPa differenceacross 1000 km is typical for meteorology, and it seems rather inconsequential does it not?
Suppose A = 1 m2
Fx = 1000 N m−2 · 1 m2 = 1000 N ≈ 225 lbf (7.2)
The volume is V = ∆x ·A = 106 m3. With density ρ = 1 kg m−3. the mass of this long blobis M = ρV = 106 kg = 2.2× 106 lbm. The acceleration of the blob is
ax =1
MFx =
1
106 kg103N = 10−3 m s−2 (7.3)
After 1 s, the speed is vx = 1 mm s−1. After 104 s = 3 hr, vx = 10 m s−1. This meteorologicalacceleration is small compared to that of cars, bicycles, footballs, exhaling and blowing noses.But, with a little patience, a significant change in the wind occurs in a few hours.

70 CHAPTER 7. PRESSURE
Here are some facts about a Newton of force. 1 Fig Newtonhas a mass of 15 g. 7 Fig Newtons weigh 7 ·g · .015 kg ≈ 1 N.
Here are some facts about “pounds”. “Pounds” are used asa unit of both mass and force. Your package of Fig Newtons may indicate a mass of 1 pound,or 454 grams. Your automobile tire may need a pressure of 30 pounds per square inch (by theway, this number is the gauge pressure, the pressure above atmospheric pressure). Confusioncan be avoided by using lbm for pound of mass and lbf for pound of force. Or the contextof the statement may indicate which pound is being referred to. Here are the definitions:
1 lbm = 0.454 kg (7.4)
1 lbf = 1 lbm · g = 4.44 N (7.5)
On the surface of the Earth, 1 lbm of mass weighs 1 lbf of force. This standard certainlydoes offer some convenience, but also causes confusion. On the moon, 1 lbm of mass weighs0.165 lbf of force.
The 1000 km prism of air in the above examples has a massof 1 × 106 kg, the same as three fully-loaded 747s, eachhaving a mass of about 3.3×105 kg. A typical synoptic-scaleacceleration from a pressure difference provided 1000 N offorce, which is equivalent to the weight of one fully-loadedDr. Fiedler.
The above example was applied to a prism of specific cross-sectional area A, but the cal-culation of the acceleration is independent of A, as both the force and mass inside areproportional to A. In meteorology, we employ the pressure gradient force (PGF):
Fx = A [p(x)− p(x+ ∆x)] (7.6)
Fx = A ∆x[p(x)− p(x+ ∆x)]
∆x(7.7)
In the limit ∆x→ 0,
Fx = −V ∂p∂x
(7.8)
ax =1
MFx = − V
M
∂p
∂x= −1
ρ
∂p
∂x(7.9)
For example, writing u = dxdt
so ax = dudt
, and assuming the PGF is the only force, then theequation of motion for an arbitrary size prism, and even for an arbitrarily shaped blob is:
du
dt= −1
ρ
∂p
∂x(7.10)
We have assumed x is horizontal, otherwise gravity would be important. Now let z be thevertical coordinate and w = dz
dt. Both gravity and the PGF appear in the vertical momentum
equation:dw
dt= −1
ρ
∂p
∂z− g (7.11)

7.3. PRESSURE, THE GREAT COMMUNICATOR 71
7.3 Pressure, the great communicator
Notice pressure couples the components of the momentumequation: the same p appears in both (7.10) and (7.11). (Be-ware (7.10) and (7.11) will need to include the Coriolis forceto be useful for meteorology, but as written could be usefulin some engineering applications.) Consider the case of staticequilibrium, no motion, and no acceleration: u = 0, w = 0,dudt
= 0 and dwdt
= 0. A consequence of this coupling is that abarometer in a house still measures the weight of the atmo-sphere, independent of the existence of the ceiling.
Consider a bucket of water, a liquid that is nearly incompressible and so canbe modeled as having a constant density ρ. In hydrostatic balance (dw
dt= 0),
∂p
∂z= −ρg (7.12)
sop(z) = −ρgz + C (7.13)
What is C? For convenience, let z = 0 be at the bottom of the bucket.The pressure must be continuous (meaning a constant value, with no jump)across the air-water interface at z = h, otherwise dp
dz=∞ and dw
dt=∞.
So p(h) (just inside the water) must be equal to the external atmosphericpressure pa:
p(h) = −ρgh+ C = pa (7.14)
C = pa + ρgh (7.15)
sop(z) = ρg(h− z) + pa (7.16)
The isobaric surfaces will be parallel to the air-water interface.
Consider a dome of water, hydrostatic in the vertical, withh = h(x, y). Imagine this dome of water was initialized witha bunch of drinking straws, with a discrete approximationto h = h(x, y). Further imagine the straws could be instan-taneously yanked away — without disturbing the water byviscous forces, leaving gaps, etc. (Don’t try this at home).
p(x, y, z) = ρg [h(x, y)− z] + pa (7.17)
The isobaric surfaces (a surface of constant p) will be foundat a certain depth h − z below the air-water interface. Note
that p will vary with x:
ρdu
dt= −∂p
∂x= −ρg∂h
∂x6= 0 (7.18)

72 CHAPTER 7. PRESSURE
Needless to say, if the dome is water is in hydrostatic balance in the vertical, it could not bein static equilibrium in the horizontal. Movement will commence.
Consider a bucket with an outlet. When turned off,
ρdu
dt= −∂p
∂x= 0 (7.19)
Therefore, when static,
p1 = p2 . (7.20)
A general principle of plumbing is that the height of a freesurface (perhaps in a water tower) controls the pressure in allconnected pipes, when the fluid is static. With both p1 andp2 being measured at a distance H below the surface,
p1 = p2 = ρgH + pa (7.21)
Now open the outlet. From experience, we know the stream of water coming out does notlaterally explode. From that fact, we deduce the pressure inside the stream of water is thesame as on the surface of the stream of water, pa. Likewise, there is no sudden change incross-sectional area of the stream as it exits, and no change is possible in the spigot: thus nosignificant acceleration has occurred from within the spigot to out of the outlet. Therefore,we conclude p2 = pa in the outlet. Fluid will accelerate toward the outlet:
a =du
dt= −1
ρ
∂p
∂x≈ 1
ρ
p1 − p2
L≈ 1
ρ
p1 − paL
(7.22)
Recall from basic kinematics that, starting from rest, constant acceleration a over a distanceL is related to final speed u by:
aL =u2
2(7.23)
Therefore,u2
2= aL =
p1 − paρ
(7.24)
Note the prediction of u is independent of L. But p1 − pais determined by nearly hydrostatic balance in the vertical.Therefore,
u2
2=p1 − paρ
= gH (7.25)
The above result can also be derived with calculus, without the series of approximations andestimates we made here. Notice the result for the speed u is identical to that for a dropfalling a distance H, with no force of resistance.

7.4. THE BERNOULLI EQUATION 73
Consider a water-filled hydraulic device with two cylindersconnected by a pipe. The pistons in the cylinders are massless,and are at the same level. 6 Fig Newtons, each of mass 15 g,and of total mass m1 are placed on the narrow piston of areaA1 . A baby elephant of mass m2 = 150 kg is placed on thewider piston. What is the ratio of the diameterD2 of the widerpiston to the diameter D1 of the narrow piston that wouldallow the system to be in static equilibrium? Answer: with
the pistons being at the same level, the gauge pressure (pressure excess above atmosphericpressure) under the pistons is the same value p. The force of the fluid on the piston mustbalance the weight: pA1 = m1g and pA2 = m2g, so
A2
A1
=D2
2
D21
=m2
m1
(7.26)
D2
D1
=
√m2
m1
= 40.8 (7.27)
Two barrels with a tube attached — one wide, one narrow.Both tubes are filled with water to the same level H above thelid. Which barrel has greater pressure under the lid? Somepeople are surprise to learn that the excess pressure is thesame, independent of the width of the pipe. In both barrels,the pressure excess above atmospheric pressure (the so-calledgauge pressure) is
p− pa = ρgH (7.28)
If the water level is H = 10 m up the tube, the excess pressurewould be 1 atm or 15 lbf in−2. The barrels could easily rupture
— in fact our famous Blaise Pascal did such a barrel-rupturing demonstration 350 years ago.
7.4 The Bernoulli equation
Using mathematics to forecast “what happens next” in a flow of fluid is difficult. Case inpoint: weather forecasting. The pressure gradient force accelerates the fluid, redistributingmass and momentum, and then pressure changes in response to that redistribution. Never-theless, in some important circumstances a diagnostic (rather than prognostic) equation canbe derived relating pressure and velocity. Being diagnostic, the equation is not for forecast-ing whats happens next, but is for constraining what happens now: a certain distribution ofvelocity implies a certain distribution of pressure. As we shall see, knowing this constrainthas some practical applications.

74 CHAPTER 7. PRESSURE
A1 A2
∆x1
∆x2
We consider flow that is steady, not static. Thismeans, looking at a point, ~U and p do not changewith time. (Static means ~U = 0). Our first spe-cific example is the flow of an incompressiblefluid through a constriction in a pipe.
Volume conservation of this incompressible flow through a constriction requires that thevolume “vacated” must be equal to the volume “moved into”:
A1∆x1 = A2∆x2 (7.29)
A1∆x1
∆t= A2
∆x2
∆t(7.30)
A1u1 = A2u2 (7.31)
(7.31) is one form of an incompressible continuity equation. The fluid must remain con-tinuous, no gaps are allowed to form. Volume of all parcels must be conserved. By theway, when you learn to do dynamics with a velocity field ~U(x, y, x, t), you will learn thatincompressibility is enforced by:
∇ · ~U = 0 , (7.32)
which is a more general form of the incompressible continuity equation.
Though the flow is steady, individual parcels do move and do accelerate. Consider theequation of motions for a parcel moving down the center axis of the pipe, which we take tobe the x direction:
du
dt= −1
ρ
dp
dx(7.33)
We multiply both sides of the equation by the same quantity u, but on the right-hand-sidewrite u as dx
dt:
udu
dt= −1
ρ
dp
dx
dx
dt(7.34)
The chain and product rules of calculus show the above can be written as:
d
dt
u2
2= −1
ρ
dp
dt(7.35)
d
dt
u2
2+
d
dt
p
ρ= 0 (7.36)
d
dt
(u2
2+p
ρ
)= 0 (7.37)
The above implies a form of Bernoulli’s equation:
u2
2+p
ρ= B (a constant) (7.38)
The invariance of the left-hand-side is often applied as “Upstream u2
2+ p
ρ” = “Downstream
u2
2+ p
ρ”

7.4. THE BERNOULLI EQUATION 75
u1u2
Here is the constriction again with pressure mon-itored at two holes in the pipe. The Bernoulliequation can be applied as
u21
2+p1
ρ=u2
2
2+p2
ρ(7.39)
Now using the continuity equation,
p1 − p2 = ρu2
1
2
A21
A22
− ρu21
2(7.40)
p1 − p2 = ρu2
1
2
(A2
1
A22
− 1
)(7.41)
Knowledge of p1 − p2 can be used to determine u1, and hence the volume flow rate u1A1
and mass flow rate ρu1A1. Such a device is called a Venturi meter, and could be used in anindustrial process to monitor a mass flow rate.
Here is a device that can be used as an anemome-ter on an aircraft, though probably not in theidealized glass form shown here. The device iscall a “Pitot-tube”, and (7.38) applied to thedevice is
u21
2+p1
ρ=p2
ρ(7.42)
where “1” is the static tap at the side and “2”is the stagnation point at the front. Measure-ment of the pressure difference p2−p1, by anal-ysis of the height difference H of the dense fluidin the manometer, allows u1 to be determined.Bernoulli’s equation gives the wind speed, blow-ing past the static taps, derivable from the pres-sure differences:
u21
2=p2 − p1
ρ(7.43)
By the way, here is another route to Bernoulli’sequation, emphasizing invariance in x, rather than t:
du
dt= −1
ρ
dp
dx(7.44)
du
dt=du
dx
dx
dt= − d
dx
p
ρ(7.45)
du
dxu = − d
dx
p
ρ(7.46)

76 CHAPTER 7. PRESSURE
d
dx
u2
2= − d
dx
p
ρ(7.47)
d
dx
(u2
2+p
ρ
)= 0 (7.48)
u2
2+p
ρ= constant (7.49)
7.5 The horizontal pressure gradient force in a hydro-
static atmosphere
Sea level pressures. 1 degree of latitudeis equal to 111 km.
500 mb heights. N-S length ofColorado = 444 km.
Figure 7.1: Two ways of plotting pressure. Left: plotting pressure on a horizontal surface.Right: plotting heights of isobaric surfaces.
500 mb heights:
vertical slice along the - - - - :
In a hydrostatic atmosphere, the PGF is pro-portional to the slope of the isobaric surfacethrough the point. Here is the proof. In gen-eral, in the (x, z) plane:
dp =
(∂p
∂x
)z
dx+
(∂p
∂z
)x
dz . (7.50)
If dx and dz move along a constant pressure sur-face, then dp = 0:
0 =
(∂p
∂x
)z
dx+
(∂p
∂z
)x
dz . (7.51)
With the above constraint between dz and dxthat maintains constant p, we can solve for ∂p
∂x
in terms of ∂p∂z
:(∂p
∂x
)z
= −(∂p
∂z
)x
dz
dx. (7.52)

7.5. THE HORIZONTAL PRESSURE GRADIENT FORCE IN A HYDROSTATIC ATMOSPHERE77
To be clear, we use partial-derivative notation to show what is held constant as dz and dxvary: (
∂p
∂x
)z
= −(∂p
∂z
)x
(∂z
∂x
)p
. (7.53)
If the atmosphere is hydrostatic (or nearly so):
∂p
∂z= −ρg (7.54)
so (∂p
∂x
)z
= ρg
(∂z
∂x
)p
(7.55)
We can drop the explicit indication of what is being held constant in the partial derivativesof (7.55) (as meteorologists, we realize only one choice makes sense), and the x-componentof the PGF is:
− 1
ρ
∂p
∂x= −g ∂z
∂x(7.56)
You may recall from elementary physics that gdz is the incremental increase in potentialenergy, per unit mass. We define a geopotential Φ with
dΦ = gdz (7.57)
In principle, Φ could be obtained by integrating the above, up from mean sea level, whereΦ = 0, and accounting for g(z) decreasing with height. Then with knowledge of Φ at allpoints in the atmosphere:
− 1
ρ
∂p
∂x= −g ∂z
∂x= −∂Φ
∂x(7.58)
We must remember in (7.58) that ∂Φ∂x
is taken on a surface of constant pressure. In futurechapters, we will learn that g in the above could be denoted ge, to be clear that it denotesacceleration due to effective gravity, which is real gravity plus a small correction to accountfor the centrifugal force of the rotating Earth. When we explore this further, that will seemlike a good idea.
Now comes a perhaps clumsy part, which could seem like a bad idea. Weather charts do notdisplay Φ, but instead geopotential height Z ≡ Φ/g where g is a standard, constant value:g ≡ 9.80655 m s−2. So there is yet one more form of the pressure gradient force to learn:
− 1
ρ
∂p
∂x= −ge
∂z
∂x= −∂Φ
∂x= −g
∂Z
∂x(7.59)
Z is not quite the true elevation at which you find the pressure surface. Z and z differ byonly a “few” meters. Z is plotted on weather charts, rather than z. For me, I suspect thecontinued use of g is an anachronism, held over from the days before electronic computation.
That being said, there is certainly a good idea left over from the “old days”. Decades ago,the National Weather Service adopted the convention of storing, using and plotting data

78 CHAPTER 7. PRESSURE
about heights of surfaces of constant pressure, rather than pressure on surfaces of constantheight. Both sorts of data could be used to calculate the horizontal forces. Two generationsof meteorologists have been now grown up with upper level charts displaying heights ofpressure surfaces. But keep this in mind: slopes of pressure surfaces yield horizontal forcesexactly only if the atmosphere is hydrostatic, or if the model is hydrostatic.
7.5.1 Summary of the pressure gradient force
We have derived1
MFx = −1
ρ
∂p
∂x= −g
∂Z
∂x. (7.60)
Analogous relations apply to the y direction. Let ∇Hp be the horizontal components of ∇p:
∇Hp =
∂p
∂xı+
∂p
∂y . (7.61)
We have shown that in a hydrostatic atmosphere the following forms for the horizontalpressure gradient force can be interchanged:
− 1
ρ∇
Hp = −g∇pZ (7.62)
Recall that in deriving the above equivalence, the vertical component is a statement ofhydrostatic balance:
dw
dt= −1
ρ
∂p
∂z− ge = 0 (7.63)
Curiously, the use of −g∇pZ seems to be valid only if the atmosphere is exactly hydrostatic,in which case w never changes in time! Of course, this never strictly happens. Nevertheless,in many models and analyses we use −g∇pZ , but diagnose changes in w with an equationother the (7.63) – we recognize the r.h.s. is not exactly zero in (7.63), just zero enough tomake −g∇pZ useful in predicting horizontal motion.

8 Buoyancy
8.1 The buoyancy force
In meteorology, the buoyancy force is the sum of a vertical pressure gradient force and theforce of gravity acting at a point. As such, the force may be upward and downward, or saidto be positive or negative. We need to mention that “a vertical pressure gradient force”is not necessarily “the vertical pressure gradient force” acting at the point, it may be aprescribed standard pressure gradient force. This leads to some ambiguity in the definitionof buoyancy in meteorology. But that ambiguity will not arise in this chapter, the pressuregradient force being referred to is the one that actually exists at the point in question.
In engineering, the buoyancy force, for example on a floating ship, is the net force frompressure acting on the ship, without also adding the weight vector of the ship.
We begin the study of the net force from pressure by examin-ing the net force of pressure on a solid cuboid submerged in astatic fluid of constant density ρF. The cuboid is tethered tothe bottom with a thread. In the fluid, even underneath theobject,
p(z) = ρFg(h− z) + pa (8.1)
On the top face:p1 = ρFg(h− z1) + pa (8.2)
On the bottom face:p2 = ρFg(h− z2) + pa (8.3)
The net upward force of pressure is
FB = A p2 − A p1 = A(p2 − p1) = AρFg(z1 − z2)
= gρFV because V = A(z1 − z2)
= gmF where mF is mass of fluid displaced by object (8.4)
FB = gmF is Archimedes’ Principle. This net upward thrust of pressure FB will here becalled the engineering buoyancy force. A little bit of calculus can show the above to be truefor an object of any shape, not just the cuboid (but that proof is not shown here).
79

80 CHAPTER 8. BUOYANCY
Consider an object floating in the fluid. Now p1 = pa, wherepa is the atmospheric pressure. (We neglect the variation of pawith height, it being much less than the variation of p withinthe fluid).
FB = A(p2 − pa) = AρFg(h− z2) (8.5)
FB = gρFV = mF (8.6)
V is the volume of fluid displaced by the object, NOT the volume of the object.
For a floating ice cube, the weight of the ice cube miceg is balancedby the buoyancy force:
miceg = FB = mFg . (8.7)
Therefore, the mass of water displaced is exactly equal to the massof the ice:
mice = mF . (8.8)
The melted ice fits exactly into the “hole” of displaced water. Thewater level does not rise. (Application: the melting of arctic sea icehas no effect in sea-level rise).
The meteorology buoyancy force Fb is often the upward force of pressure minus the weightdue to the mass m of the object:
Fb = FB − gm = g(mF −m) . (8.9)
With vertical acceleration given by:
ma = Fb = g(mF −m) (8.10)
a = gmF −mm
. (8.11)
For a submerged object, the volume occupied by mF and m are the same, so a can be relatedto the mass densities ρ
Fand ρ as:
a = gρF− ρρ
(8.12)
Note the role of the relative density difference.
Now consider buoyancy without reference to a discrete blob of fluid:
dw
dt= −g − 1
ρ
∂p
∂z(8.13)
ρdw
dt= −ρg +
(−∂p∂z
)(8.14)
On the right, the first term is always negative, and the second term almost always positive.(The exception being locally extreme circumstances, such as in a suction vortex in a tornado.)When the first term wins we might say there is negative buoyancy. When the second termwins we might say there is positive buoyancy.

8.1. THE BUOYANCY FORCE 81
Consider a blob (or parcel) embedded in a narrow updraftof a thunderstorm. Pressure and density outside the updraftis denoted with an overbar. Outside the updraft, we assumehydrostatic balance occurs:
ρdw
dt= −ρg − dp
dz= 0 . (8.15)
ordp
dz= −ρg . (8.16)
Inside the updraft:
ρdw
dt= −ρg − dp
dz. (8.17)
Now the key approximation: If the updraft is sufficiently narrow, the external pressurefield (at the same elevation) imposes itself on the updraft:
dp
dz=dp
dz(8.18)
ρdw
dt= −ρg − dp
dz(8.19)
ρdw
dt= −ρg + ρg (8.20)
dw
dt= g
ρ− ρρ
. (8.21)
The right hand side is often call the buoyancy or the buoyant force. Note the similarity withwhat we saw in (8.12), which was developed for the vertical acceleration of a discrete objectin a fluid. (8.21) can also be expressed in terms of temperature differences:
p = RρT ρ =p
RTρ =
p
RT(8.22)
dw
dt= g
p
RT− p
RTpRT
(8.23)
But p = p so:dw
dt= g
T − TT
. (8.24)
(8.24) can be expressed in terms of differences in potential temperature Θ:
T = Θ
(p
p
)R/cp. (8.25)
Again using p = p,dw
dt= g
Θ−Θ
Θ. (8.26)
Using Θ to calculate buoyancy may be advantageous because Θ in a parcel may be moreeasy to predict than T . In fact, in some applications Θ is conserved in a parcel, meaningthe value does not change in time.

82 CHAPTER 8. BUOYANCY
8.2 Buoyancy-driven motion
Assume a streamlined blob of fluid of density ρ, surroundedby a fluid ρ. The horizontal accelerations needed to move fluidout of the way, and to fill in the wake behind the blob, aresmall compared to the vertical accelerations. In this sense,dpdx
remains small, and the external pressure p imposes itselflaterally into, and around, the blob. Thus, the conditions for
the use of (8.26) are satisfied.
8.2.1 Case #1, constant gΘ−ΘΘ
This case might occur if the atmosphere is well-mixed, with Θ constant with height. Westretch this idealization further, and assume the blob is able to conserve Θ. The parcelstarts from rest and moves a distance h with constant acceleration a. The vertical velocityacquired is:
w =√
2ah (8.27)
Suppose Θ = 303 K and Θ = 300 K
a = gΘ−Θ
Θ≈ .1 m s−2 (8.28)
Suppose h = 500 m:
w =√
2 × 500 m × .1 m s−2 = 10 m s−1 (8.29)
8.2.2 Case #2, gΘ−ΘΘ
linear with z
The environment is assumed to be linearly stratified:
Θ(z) = Θ + σz , (8.30)
where σ is a constant,
σ ≡ dΘ
dz. (8.31)
Again, we assume the potential temperature Θ is conserved:the parcel began as environmental air, and retains the value
of Θ from the height of its origin, z:
Θ = Θ + σz (8.32)

8.2. BUOYANCY-DRIVEN MOTION 83
Θ−Θ = (Θ + σz)− (Θ + σz) (8.33)
Θ−Θ = σ(z − z) (8.34)
dw
dt= −gσ(z − z)
Θ(8.35)
d2z
dt2+ g
σ(z − z)Θ
= 0 (8.36)
Let y ≡ z − z, so y is the displacement of the parcel from its origin:
d2y
dt2+gσ
Θy = 0 . (8.37)
ord2y
dt2+ ω2y = 0 (8.38)
where
ω2 ≡ gσ
Θ≡ g
Θ
dΘ
dz. (8.39)
Even though Θ is formally a function of z, we may approximate Θ as constant in thedenominator, which makes ω2 a constant. You should be familiar with the solution to:
d2y
dt2+ ω2y = 0, (8.40)
y(t) = A cos (ωt) +B sin (ωt) . (8.41)
This oscillation frequency ω in
ω2 ≡ g
Θ
dΘ
dz(8.42)
is often called either the Brunt-Vaisala frequency or buoyancy frequency. It is sometimesdenoted as N , rather than ω.
Though ω, or N , has been derived here as the oscillation frequency for an idealized stream-lined parcel, it is also the frequency of short-wavelength gravity waves. A typical value forddz
Θ is 3 K km−1, or 0.003 K m−1. A typical value for Θ = 300 K.
ω2 =g
Θ
dΘ
dz
=10 m s−2
300 K0.003 K m−1 = 10−4 s−2 (8.43)
Soω = 0.01 s−1 (8.44)
The period of oscillation is:
τ =2π
ω≈ 600 s (8.45)

84 CHAPTER 8. BUOYANCY
8.2.3 Case #3, gΘ−ΘΘ
nonlinear with z
The conservation laws of thermodynamics, which can give an accounting of latent heatrelease, may allow for Θ of a rising parcel, and hence the buoyancy, to be determined as afunction of z:
dw
dt= g
Θ(z)−Θ(z)
Θ(z)≡ b(z) . (8.46)
We may attempt to solve this as 2nd order ODE for z(t):
d2z(t)
dt2= b(z) (8.47)
and may find that such attempts are often unproductive. We usually make more progress ifwe solve for w(z) with:
dw
dt=
d
dtw(z) =
dw
dz
dz
dt=dw
dzw =
d
dz
w2
2(8.48)
So (8.46) becomes a first-order ODE with z as the independent variable:
d
dz
w2
2= b(z) (8.49)
This has solution
1
2w2(z2)− 1
2w2(z1) =
z=z2∫z=z1
b(z)dz (8.50)
For
z2 = zEL (8.51)
z1 = zLFC (8.52)
w(z1) ≈ 0 (8.53)
we have a prediction for w(zEL), which wouldalso be wmax
1
2w2
max =
z=zEL∫z=zLFC
gΘ−Θ
Θdz ≡ CAPE (8.54)
where CAPE is an abbreviation for ConvectiveAvailable Potential Energy. CAPE is said to be
“proportional to the positive area in the sounding”.

8.3. HYDROSTATIC ACCOMMODATION OF DENSITY DIFFERENCES 85
8.3 Hydrostatic accommodation of density differences
We have seen that density variations in the horizontal direction may lead to a buoyancy force.In particular, we have examined the extreme limit of the dynamical circumstances removingany pressure variation on the horizontal direction. In this limit, a warm thunderstormupdraft passing overhead would not cause any pressure drop at the surface, or anywhereelse. The density variation causes vertical acceleration of narrow tubes and parcels of air,and has no effect on pressure
Figure 8.1: Greensburg KS,12 days after the 4 May, 2007Tornado.
Nature provides a noteworthy counter-example of dynamicalcircumstances that do allow for substantial variation of pres-sure in the horizontal direction, even in narrow updrafts: thecyclostrophic balance provided by a tornado.
Suppose inside the core of a idealized vertical tornado thepressure p(z) results from hydrostatic balance of the densityfield ρ(z). The surface pressure at the base of the tornado is:
p(0) =
∫ ∞0
gρdz . (8.55)
Likewise, outside the storm, the pressure p(z) is in hydrostatic balance with ρ, leading to asurface pressure outside the storm of:
p(0) =
∫ ∞0
gρdz . (8.56)
The pressure deficit in the tornado (a positive number) is simply:
p(0)− p(0) =
∫ ∞0
g (ρ− ρ) dz . (8.57)
Density reductions in thunderstorm updrafts may pro-duce strong updrafts, the magnitude of which we canestimated by CAPE. Alternatively, the density reduc-tions can produce a pressure drop beneath them. Theseprocesses tend to be mutually exclusive, but can occurin very close proximity.
However, in the presence of pressure variation, the den-sity variation does not arise just from variation of Θ, the pressure variation itself contributesto the density variation. A mathematical investigation shows that the maximum possiblehydrostatic surface pressure drop cannot be derived solely from CAPE. But CAPE certainlyserves as a guide: large CAPE can produce strong updrafts and/or strong surface pressuredeficits in tornadoes.

86 CHAPTER 8. BUOYANCY
Figure 8.2: Model CAPE for 7 pm CDT time on 4 May, 2007.

8.3. HYDROSTATIC ACCOMMODATION OF DENSITY DIFFERENCES 87
Figure 8.3: Model sounding for 10 pm CDT on 4 May 2007, for Medicine Lodge KS (nearGreensburg). From a website of Jon Davies.
8.3.1 Computer simulations
Figure 8.4 summarizes some axisymmetric computer simulations of a rising blob of buoyantair. A detailed explanation is available at http://12characters.net/explore/blobs.
html. In (a), the azimuthal velocity v is initialized to be in steady balance with a hydrostaticpressure deficit under the buoyant blob. The fields persist for all time t. In (b), v = 0initially. The blob rises. Time t = 1.8 is shown. In (c), v is initially set to half the valuein (a). The blob rises, and contracts the initial v into a more intense tornado-like vortex.Vertical acceleration is reduced in the core of the vortex. Time t = 1.8 is shown.

88 CHAPTER 8. BUOYANCY
0.00 1.00b (0.10)
0.00 0.52s
t=1.80 β=0.5
-0.00 0.45v (0.08)
-0.17 0.52w (0.10)
-0.27 0.08p′ (0.05) 0.01 10.00p (1.00)
0.00 0.95b (0.10)
0.00 0.76s
t=1.80 β=0.0
0.00 0.00v (0.08)
-0.28 0.76w (0.10)
-0.18 0.19p′ (0.05) 0.00 10.01p (1.00)
0.00 1.00b (0.10)
0.00 0.00s
t=1.80 β=1.0
-0.00 0.51v (0.08)
-0.00 0.00w (0.10)
-0.30 0.00p′ (0.05) 0.00 10.00p (1.00)
(c)
(b)
(a)
Figure 8.4: A rising blob initialized with azimuthal velocity (a) in cyclostrophic balance (b) setto zero (c) set to half the value in (a).

9 Choosing a coordinate system
Choosing a coordinate system at the start of a dynamical analysis can be likened to anopening move in chess: it is difficult to recover from a bad opening move. As an exampleof a “good” opening move and a “bad” opening move, we revisit the familiar situation of africtionless block sliding down an inclined plane.
Figure 9.1: Two possiblesets of unit vectors for ana-lyzing the motion of a blocksliding down a plane.
The equation of motion for the center of mass of the block is
md2~r
dt2= m~g + ~N . (9.1)
Let’s make the goal to solve for the time required to slide downthe frictionless plane a distance L, starting from rest. The ıand k directions can be thought of as the “default” coordinatesystem for analyzing dynamics at the surface of the Earth. Itis the familiar coordinate system with one direction alignedwith gravity and the other one horizontal. Another choice
would be to use unit vectors that are tangential and normal to the plane:
I = cos θ ı− sin θ k (9.2)
K = sin θ ı+ cos θ k (9.3)
With ~g being purely vertical and ~N being purely normal, (9.1) can be written:
md2~r
dt2= −mgk +NK . (9.4)
The explicit appearance of both k and K doesn’t make a compelling case for which coordinatesystem is best. Let’s find the solution using both possibilities.
9.1 Using normal and tangential directions
This turns out to be the “good” choice, in that it efficiently leads to the answer we areseeking. The equation of motion in the I direction is:
I · d2~r
dt2= −gk · I +
N
mK · I (9.5)
89

90 CHAPTER 9. CHOOSING A COORDINATE SYSTEM
d2X
dt2= g sin θ (9.6)
The motion has constant acceleration a. We can easily solve for the time to accelerate fromrest at X = −L and travel to X = 0, a net distance of L. We use L = 1
2at2 and t =
√2L/a,
so
t =
√2L
g sin θ. (9.7)
9.2 Using vertical and horizontal directions
The equation of motion in the ı direction (horizontal) is:
ı · d2~r
dt2= −gk · ı+
N
mK · ı (9.8)
d2x
dt2=N
msin θ (9.9)
This cannot be solved without knowledge of N . The equation of motion in the k direction(vertical) is:
k · d2~r
dt2= −gk · k +
N
mK · k (9.10)
ord2z
dt2= −g +
N
mcos θ (9.11)
Again we see N , still unknown. N can be eliminated between (9.9) and (9.11).
d2z
dt2= −g +
cos θ
sin θ
d2x
dt2(9.12)
N is gone, but we still have both x and z. In order to make progress we must explicitly use akinematical constraint, a relation between dz and dx for a block that slides down the plane,and does not bounce. The block must follow the slope of the plane:
dz = −dx tan θ (9.13)
so (9.12) becomes
− tan θd2x
dt2= −g +
cos θ
sin θ
d2x
dt2(9.14)
or
− sin θ
cos θ
d2x
dt2= −g +
cos θ
sin θ
d2x
dt2(9.15)
or
− sin2 (θ)d2x
dt2= −g sin(θ) cos(θ) + cos2 (θ)
d2x
dt2(9.16)

9.3. A QUESTION OF INTERPRETATION 91
ord2x
dt2= g sin(θ) cos(θ) . (9.17)
With the origin taken to be the base on the inclined plane, starting at position of X = −Lcorresponds to x = −L cos(θ) . We again solve the constant acceleration formula for t:
∆x = L cos(θ) =1
2g sin(θ) cos(θ) t2 (9.18)
This yields the same answer for t as in (9.7), but with a lot more work. The “good” choicefor the coordinate system was able to solve directly for the component of motion that wasessential for answering the question.
9.3 A question of interpretation
Although using ı and k was in some sense the “bad” choice, it certainly highlights anenlightening paradox. ~N appears to push the object horizontally in
d2x
dt2=N
msin(θ) (9.19)
and thus ~N appears to be at least partially responsible for the block getting to its destination.But ~N has no role in:
d2X
dt2= g sin(θ) , (9.20)
where we see gravity is responsible for getting the block to its destination.
So is ~N important or not? What does it do? An energy equation helps to answer thatquestion, independent of the coordinate system. This provides our first example of an energyequation derived from a vector equation of motion. (9.1) can be written
md~v
dt= m~g + ~N . (9.21)
Dotted with ~v, this gives
~v ·md~v
dt= ~v ·m~g + ~v · ~N (9.22)
But ~v · ~N = 0, because ~v is tangent to the plane and ~N is normal to it. Also,
~v · ~g =
(dx
dtı+
dz
dtk
)·(−gk
)= −gdz
dt(9.23)
Furthermore, you can prove, by expanding in Cartesian components, that:
d
dt
(1
2~v · ~v
)= ~v · d
dt~v . (9.24)

92 CHAPTER 9. CHOOSING A COORDINATE SYSTEM
Sod
dt
(1
2m~v · ~v
)= −mgdz
dt(9.25)
This can be written as an energy conservation law
dE
dt= 0 (9.26)
with
E ≡ 1
2mv2 +mgz . (9.27)
~N plays no role in the energy equation. A decrease in z “causes” an increase in v, aconclusion we make independent of the choice of the coordinate system. Nevertheless, thatfact does not counter the claim that the horizontal component of ~N is what moves the blockin the horizontal direction.

10 Polar coordinates
We first analyze the familiar kinematics of circular motion, but using Cartesian coordinates.In doing so, we uncover a set of polar-coordinate units vectors, r and θ, that appear to behelpful in making a tidy description of the motion.
In the subsequent section, we then “do dynamics” with these new unit vectors, meaning inpolar coordinates, by deriving and then using rules for time derivatives of r and θ.
10.1 Circular motion in Cartesian coordinates
Recall the Cartesian position vector in a plane:
~r = xı+ y . (10.1)
The conventional relation between polar coordinates (r, θ) and Cartesian coordinates (x, y)are:
x = r cos θ (10.2)
y = r sin θ . (10.3)
We can write a “mixed” representation of position, which uses polar coordinates r and θ butretains the familiar Cartesian unit vectors ı and :
~r = r cos θ ı+ r sin θ . (10.4)
Suppose a particle moves in a circle with constant r and constant angular velocity ω, orθ = ωt:
~r = r cos(ωt) ı+ r sin(ωt) . (10.5)
With r, ω, ı and assumed to be independent of time here,
~v =d~r
dt= −rω sin(ωt) ı+ rω cos(ωt) (10.6)
Note that |~v|2 = ω2r2. We next find the acceleration:
~a =d~v
dt= −rω2 cos(ωt) ı− rω2 sin(ωt) (10.7)
93

94 CHAPTER 10. POLAR COORDINATES
which is
~a = −ω2~r = −v2
r2~r (10.8)
If we define r:
~r = rr (10.9)
we can write ~a as
~a = −ω2rr = −v2
rr (10.10)
In uniform circular motion, the acceleration is directed toward the center, with magnitudeω2r, or v2
r. This is the centripetal acceleration. Of course, (10.10) can also be derived,
perhaps even with greater satisfaction, with a picture representation of a velocity vector,and a pictorial accounting of the change in direction of the velocity vector as the object goesaround in a circle. That is the derivation that is common in introductory text books.
But we have another purpose with the mathematical tedium here. We can write vθ = ωr,and (10.6) as:
~v = −vθ sin(θ) ı+ vθ cos(θ) = vθθ (10.11)
where
θ ≡ − sin(θ) ı+ cos(θ) (10.12)
For the record, we reiterate:
r ≡ cos(θ) ı+ sin(θ) (10.13)
and note the θ · r = 0.
10.2 Dynamics in polar coordinates
Now we will explore “doing dynamics” entirely in the polar coordinate basis r and θ. Wecan use the Cartesian definitions (10.12) and (10.13) to establish:
dr
dθ= θ
dθ
dθ= −r (10.14)
and then use the chain rule of calculus to derive:
dr
dt=
dr
dθ
dθ
dt=
dθ
dtθ
dθ
dt=
dθ
dθ
dθ
dt= −dθ
dtr (10.15)

10.2. DYNAMICS IN POLAR COORDINATES 95
Figure 10.1: Polar coordi-nates and unit vectors.
Using (10.15) in dynamics has some striking differences fromusing the Cartesian basis, where one basis was applied for allpositions. In (10.15), even the most inconsequential particle isallowed to define its own fundamental directions as it moves:as θ for the particle changes, those r and θ directions will havetime derivatives. Consider
~F = m~a , (10.16)
which in Cartesian coordinates was:
d2x
dt2=Fxm
(10.17)
d2y
dt2=Fym
(10.18)
But suppose ~F is given in polar coordinates:
~F = Fr r + Fθ θ . (10.19)
DO NOT assume this (there are a number of things wrong, and the second equation is noteven dimensionally correct):
WRONG :d2r
dt2=Frm
(10.20)
WRONG :d2θ
dt2=Fθm
(10.21)
The actual equations of motion are a bit more complicated than that. But the derivationonly needs be done once, and then a host of situations will can be expeditiously analyzed,without all the clumsy use of sin(θ) and cos(θ) . Having formally derived (10.15), sin(θ)and cos(θ) can be left behind.
Here we begin the correct derivation of the equations of motion in polar coordinates. Theposition vector in polar coordinates is
~r = rr , (10.22)
which looks to be rather ambiguous compared with
~r = xı+ y . (10.23)
Aren’t two pieces of information needed to define where a particle is in a plane? Yes, andthat angular information θ is implicitly contained in r: r is directed with a θ that points atthe particle.
The velocity vector is:
~v =d~r
dt=
d
dt(rr) =
dr
dtr + r
dr
dt(10.24)

96 CHAPTER 10. POLAR COORDINATES
Note, importantly, that unlike the Cartesian unit vectors, ddt
r 6= 0. Using (10.15),
~v =dr
dtr + r
dθ
dtθ . (10.25)
Onward to acceleration:
~a =d~v
dt=
d2r
dt2r +
dr
dt
dr
dt+
dr
dt
dθ
dtθ + r
d2θ
dt2θ + r
dθ
dt
dθ
dt(10.26)
=d2r
dt2r + 2
dr
dt
dθ
dtθ + r
d2θ
dt2θ − r
(dθ
dt
)2
r
=
[d2r
dt2− r
(dθ
dt
)2]
r +
(2
dr
dt
dθ
dt+ r
d2θ
dt2
)θ (10.27)
In polar coordinates, the equation of motion m~a = ~F is
m
[d2r
dt2− r
(dθ
dt
)2]
r +m
(2
dr
dt
dθ
dt+ r
d2θ
dt2
)θ = Frr + Fθθ (10.28)
or
d2r
dt2− r
(dθ
dt
)2
=Frm
(10.29)
2dr
dt
dθ
dt+ r
d2θ
dt2=
Fθm
. (10.30)
We can expect (10.28) to be most useful when ~F has a simple form in polar coordinates.For example, classic planetary motion is studied with
Fr = −GMm
r2(10.31)
Fθ = 0 (10.32)
(FYI: See the wikipedia entry for “Orbit”). That application is one of the most satisfyingapplications of elementary differential equations. A solution for elliptical orbits is obtainedrather effortlessly, and confirms Newton’s discovery (which he obtained by an excrutiatinguse of geometrical theorems) that Kepler’s laws are consistent with an inverse square law forgravity. That solution is a triumph of great historical importance. But this is a meteorologytext, so that solution will not be emphasized. In meteorology, the salient application ofcentral force motion will be to vortices, and in particular to tornadoes and hurricanes.
A second derivation
The acceleration in polar coordinates is so important, let’s derive it again. but with emphasison the velocity components. We can write (10.25) as:
~v = vr r + vθ θ (10.33)

10.2. DYNAMICS IN POLAR COORDINATES 97
with
vr ≡dr
dt(10.34)
vθ ≡ rdθ
dt. (10.35)
From
~a =d~v
dt=
d
dt(vr r) +
d
dt
(vθ θ
)(10.36)
and using (10.15) written as
dr
dt=vθrθ
dθ
dt= −vθ
rr (10.37)
we can derive
~a =
(dvrdt− v2
θ
r
)r +
(vrvθr
+dvθdt
)θ (10.38)
which is equivalent to (10.27).
10.2.1 Circular, central-force motion
Let’s revisit the circular motion explored in section 10.1. Central-force motion, by definition,has Fθ = 0. For the case with r assumed constant, meaning dr
dt= vr = 0, ~F = m~a from
(10.38) simplifies to:
−v2θ
r=
Frm
(10.39)
dvθdt
= 0 (10.40)
The solution is constant vθ:
vθ = ±√−rFrm
. (10.41)
The solution is only possible with Fr ≤ 0 and constant. So Fr = Fr(r), meaning independentof θ.
10.2.2 Bead on a spoke

98 CHAPTER 10. POLAR COORDINATES
Consider a frictionless bead on the spoke of a wheel, similar to abicycle wheel, except the spoke is exactly radial from the hub. Thewheel spins with constant angular velocity dθ
dt= ω. Think of the
wheel as spinning horizontally, or in the absence of gravity. WithFr = 0 in (10.29):
d2r
dt2− ω2r = 0 (10.42)
The bead is initially at rest: we assume r(0) = R and drdt
(0) = 0. The solution is:
r(t) =1
2R(eωt + e−ωt
)= R cosh(ωt) (10.43)
r(t) is ultimately exponentially outward, for either positive or negative ω. (Admittedly,beads on spokes are rare in meteorology).
10.2.3 Conservation of Angular Momentum
This principle will be extremely useful in meteorology. (However, the principle will be modi-fied later to include the Coriolis force, to obtain the form most widely used in meteorology).Recall (10.30):
2dr
dt
dθ
dt+ r
d2θ
dt2=Fθm
. (10.44)
This can be written:1
r
d
dt
(r2 dθ
dt
)=Fθm
. (10.45)
In the case of Fθ = 0:d
dt
(r2 dθ
dt
)= 0 , (10.46)
We call this quantity the angular momentum (per unit mass):
r2 dθ
dt(10.47)
which is conserved (invariant, remains constant) in central force motion. This allows foruseful predictions, without solving a differential equation, or with using a reduced numberof differential equations.
A second derivation
Conservation of angular momentum is so important, let’s derive it again, beginning with theform
aθ =vrvθr
+dvθdt
. (10.48)

10.2. DYNAMICS IN POLAR COORDINATES 99
With vr ≡ drdt
, we can write the above as
aθ =1
r
d
dt(rvθ) , (10.49)
which implies that if Fθ = 0 thend
dt(rvθ) = 0 . (10.50)
We say rvθ is conserved in central-force motion. For example, consider a ring of air in atornado with a radius of r = 100 m and vθ = 50 m s−1. The ring of air is then sucked intothe tornado and reaches a new radius of r = 50 m. Conservation of rvθ implies that at thenew radius, vθ = 100 m s−1.
10.2.4 Rankine vortex model of a tornado
Figure 10.2: Pressure (col-ors) and velocity vectors in aRankine vortex.
If the radial component of the pressure gradient force pro-vides only centripetal acceleration, the flow is said to be incyclostrophic balance:
− v2θ
r= −1
ρ
dp
dr. (10.51)
Note that we are assuming circular motion, so we can writev = vθ to make the equations a bit more tidy. But keep inmind that v is a signed quantity in this section. In futurechapters, we show that, with the period of rotation for a tor-nado being much less than a day, the neglect of the Coriolisforce in (10.51) is justified when applied to a tornado.
The Rankine model for the tornado has two distinct regions.For the core, with r ≤ rc, the vortex rotates like a solid:
v = vcr
rc(r ≤ rc) (10.52)

100 CHAPTER 10. POLAR COORDINATES
Figure 10.3: p(r) and v(r) in a Rankinevortex model of a tornado
where vc is the value of v at the core boundary,at r = rc. Outside the core, for r ≥ rc, the an-gular momentum rv is constant, consistent withthe notion that rings of air have been drawn intoward the core from a source of constant an-gular momentum:
v = vcrcr
(r ≥ rc) . (10.53)
We solve (10.51) for p(r):
dp
dr= ρ
v2
r. (10.54)
For simplicity, we assume ρ is constant, whichis not true for real tornadoes. The assumptionof constant ρ may introduce errors of approxi-mately 10% in these calculations. For r ≤ rc,we use (10.52) in (10.54):
dp
dr= ρ
v2c
r2c
r (10.55)
which has a solution
p(r)− p(0) =1
2ρv2
c
(r
rc
)2
. (10.56)
For r ≥ rc, we use (10.53) in (10.54):
dp
dr= ρ
v2cr
2c
r3(10.57)
which has solution
p(r) = −1
2ρv2cr
2c
r2+ C . (10.58)
But p(∞) = C, so
p(r)− p(∞) = −1
2ρv2cr
2c
r2. (10.59)
Applying the above at r = rc:
p(∞)− p(rc) =1
2ρv2
c (10.60)
Recall inside the core:
p(rc)− p(0) =1
2ρv2
c (10.61)
Combining (10.60) and (10.61) gives the pressure deficit in terms of the maximum windspeedvc:
p(∞)− p(0) = ρv2c . (10.62)

10.2. DYNAMICS IN POLAR COORDINATES 101
In a tornado with
vc = 100 m s−1 (10.63)
and
ρ = 1 kg m−3 (10.64)
p(∞)− p(0) = 104 Pa = 100 mb (10.65)
10.2.5 Flow past a cylinder
The mathematical solution for ideal fluid flow past a cylinder is classic problem in fluidmechanics. By ideal fluid, we mean the flow is incompressible and inviscid. The analyticalsolution can be obtained by a student of elementary fluid mechanics, and teaches manyvaluable lessons about the principles of mathematical analysis of fluid flow. We do notpresent the method of solution here, rather we point out some physical principles in thesolution.
Water is nearly incompressible, and suitably ideal inthat sense. But no fluid is inviscid, no fluid can di-vert around a cylinder without friction forming a thinboundary layer of reduced speed. The fluid of a realfluid around a cylinder is most notably different in thewake of the cylinder. Even a thin boundary layer cantrigger the formation of this wake, as seen in this pho-
tograph, which shows streaklines from reflective flakes in the flow. In the ideal solution thelength of the axis is infinite, so the solution is free of any three-dimensional effect; the flowis entirely in a plane transverse to the cylinder. In laboratory renditions, the cylinder is notinfinite, but that is not usually the source of the discrepancy with the ideal solution.

102 CHAPTER 10. POLAR COORDINATES
Figure 10.4: Pressure (red high,blue low) and velocity vectors in flowpast a cylinder.
Nevertheless, up to about half way around the cylinder,the experimental renditions correspond to the ideal so-lution. Elementary theory of partial differential equa-tions provides for all the velocity vectors and the entirepressure field shown here. For our purposes here, wewill explain the dominant features of this ideal solu-tion. Let the uniform speed upstream of the flow bedenoted U . For the flow along the center line, thepressure rises by 1
2ρU2 at the stagnation point. That
feature is entirely obtainable from the Bernoulli equa-tion, as was done for the Pitot tube in (7.42). Thesymmetry of the flow is a consequence of the flow beinginviscid. In this context, the high pressure at the rearstagnation point is entirely understandable: the excesspressure of 1
2ρU2 is needed to accelerate the fluid from
stagnation back up to a speed U .
What about the low pressure on the sides? Just as ina tornado, low pressure is needed to provide centripetal acceleration. Recall the equationfor cyclostrophic balance in polar coordinates (10.51),
∂p
∂r= ρ
v2
r. (10.66)
For circular motion, the radius of curvature is the radial coordinate r. In the flow past acylinder, the radius of curvature (the radius of the circle tangent to the flow) is approximatelythe radius of the cylinder R, and v ≈ U . So on the sides of the cylinder
∂p
∂r≈ ρ
U2
R(10.67)
In integrating ∂p∂r
outward to find the change in p, we might expect the estimate (10.67) to
be valid out to ∆r ≈ R, after which the flow becomes straighter and then ∂p∂r
diminishestoward 0. So we expect the pressure deficit on the sides of the cylinder to be approximatelyρU2. Mathematical analysis shows it to be 3
2ρU2. Although we have not proven in this text
that the Bernoulli equation applies for ideal flow along curved trajectories (our proof wasfor a straight line), it does apply. Let’s consider a trajectory that begins far upstream withpressure p1 and speed U . Let’s solve for the speed V in the lowest pressure p2:
p1 + ρU2
2= p2 + ρ
V 2
2(10.68)
Accepting the result quoted above that
p1 − p2 =3
2ρU2 , (10.69)

10.2. DYNAMICS IN POLAR COORDINATES 103
we find V = 2U . Well, that’s an interesting result. Let’s apply it. Suppose you are drivingan infinite cylinder through motionless fluid at 60 mph, if you put your hand out the sidewindow, you would feel a wind of 120 mph. Maybe something similar happens to cars thatare infinite cylinders. Maybe if the cars are “streamlined”, this amplification of the wind isless. If the pitot-tube is to be used as anemometer, meaning u1 in (7.43) is assumed to alsobe the wind speed far away from the device, the amplification is assumed to be zero.

11 Non-inertial reference frames
Let the position vector in an inertial reference frame be de-noted ~s. The equation of motion is:
md2~s
dt2= ~F . (11.1)
With ~s being a real acceleration, ~F would be the sum of realforces. Suppose ~s points to a ping pong ball in motion in the
back of truck. For inhabitants of the truck, the truck provides the useful coordinate system(reference frame) for which to describe (or forecast) the motion of the ping pong ball. Let
~s = ~s + ~r . (11.2)
where ~s is the vector from the origin of the inertial reference frame to the origin of the truckreference frame. For the inhabitants of the truck, predictions about ~s are not as useful aspredictions about ~r, measured from the corner of the truck.
If ~s(t) is known, because the equation of motion (11.1) has been solved, and if ~s is known,because the truck is known to move in a certain way, then forecasts from the inertial framecan be converted for use inside the truck with
~r(t) = ~s(t)− ~s(t). (11.3)
But what if the inhabitants of the truck wanted to make a forecast for ~r directly, meaningto solve for ~r(t) in an equation of motion? They could proceed as follows:
md2~s
dt2= m
d2~sdt2
+md2~r
dt2= ~F (11.4)
d2~r
dt2=
1
m~F − d2~s
dt2. (11.5)
This form will be useful if ~s is known prior to the forecast attempt for ~r, which allows −d2~sdt2
to be treated as a fictitious or inertial force (per unit mass). The terms fictitious force andinertial force are synonymous.
104

11.1. LINEARLY ACCELERATING REFERENCE FRAME 105
11.1 Linearly accelerating reference frame
Consider a truck with constant velocity:
d2~sdt2
= ~0 , (11.6)
so (11.5) reverts to:d2~r
dt2=
1
m~F . (11.7)
The forecasts for ~r are the same as if the truck were stationary. This is the principle ofGalilean invariance.
The next level of complexity is a truck accelerating along a straight line. We take the exampleof acceleration along the x-axis.
d2~sdt2
= αı (11.8)
d2~r
dt2=
1
m~F − αı . (11.9)
The acceleration of the truck causes an inertial force to appear in the equation of motion,directed toward the back of the truck. Note both reference frames would share the sameCartesian unit vectors ı, and k.
Consider an inclined plane in the back of thetruck. The equation of motion is
d2~r
dt2=
1
mNK− gk− αı (11.10)
With I · d2~rdt2
= d2Xdt2
,
d2X
dt2= −gk · I− αı · I (11.11)
With
I = cos θ ı− sin θ k (11.12)
and
K = sin θ ı+ cos θ k (11.13)
we have
X = g sin θ − α cos θ (11.14)
For α cos θ > g sin θ, the block slides up the plane. A plane with θ = tan−1(α/g) allows theblock to remain at rest.

106 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
A space colony shaped as a torus could haveartificial gravity provided by rotation. Let Ωbe the angular frequency about the axis and letR be the radius of the torus. For a referenceframe fixed on the torus,
d2~sdt2
= −Ω2Rr (11.15)
and within the reference frame (a room or cabinin the torus),
d2~r
dt2=
1
m~F − d2~s
dt2=
1
m~F + Ω2Rr . (11.16)
The last term is the centrifugal force, which pro-vides an artificial gravity. But we shall see in this chapter, simply adding a centrifugal forceΩ2Rr is not entirely correct. It is correct for a stationary object (stationary with respectto the torus), say a science fiction novel resting on a table. But for moving objects, say athrown football, there will also be a Coriolis force that acts.
11.2 Tidal forces
Figure 11.1: The tidalforce, the sum of the externalforce of gravity and centrifu-gal force resulting from beingin orbit about the body (outof picture, on right) causingthe force.
In the previous section, the science fiction novel has cen-tripetal acceleration toward the center of the torus becauseof the force of the table on the novel. If the table is yankedaway, the novel falls to the floor of the room.
But suppose this same room is taken outside the torus andput into an orbit around a small neutron star, but with thesame orbital characteristics that the rotating torus provided.Now gravity is providing the centripetal acceleration, but notjust of the structure of the room, but also of everything inthe room. So when the table is yanked away, the book justhovers. Or does it?
The Earth is attracted by, and accelerates toward, externalmasses: the sun, moon, planets, stars, and galaxies. Thoseaccelerations of the Earth cause inertial (fictitious) forces inthe reference frame of the Earth, away from the direction ofacceleration. But the same gravity that is accelerating thereference frame (meaning the solid Earth) is also accelerating
all masses in the reference frame. Recall gravity is a rather special force: being proportionalto mass, the resulting acceleration is independent of the mass.

11.2. TIDAL FORCES 107
Depending where the object is on Earth, the force of gravity from the external mass doesnot exactly cancel the inertial force from the acceleration of the center of mass of the Earth.There is a small residual force called the tidal force.
In its circular orbit around the sun, the centripetal acceleration toward the sun is:
ω2r =
(2π
1 yr
)2
× 1.496× 1011 m = 0.0059 m s−2 (11.17)
In the reference frame of the Earth, that acceleration causes a centrifugal force away fromthe Sun. The force of gravity of the sun on an air molecule is
GMS
r2= 0.0059 m s−2 (11.18)
toward the sun. An acceleration of 0.0059 m s−2 is large in meteorology, and would generatea windspeed of 60 m s−1 in 3 hours. But the force of gravity is directed opposite to theinertial force. The forces nearly cancel. What remains is the tidal force. Next, we formallyderive that small residual force.
Figure 11.2: Hydrostatic pressure inan ocean will decrease where the tidalforce is outward, causing convergenceof water into the low pressure.
In an inertial reference frame, the equation of motionfor a particle (or parcel of air) is
md2~s
dt2= ~F , (11.19)
where ~s is the position vector of the particle as mea-sured in an inertial reference frame and ~F is the sumof all the real forces.
We will write
1
m~F = ~g + ~gs + ~A (11.20)
where ~g is the acceleration from the gravity of Earth, ~gs is the acceleration from the sun,moon, planets, galaxies, etc., and ~A is the acceleration caused by other applied forces (fric-tion, pressure gradients, etc.). A “forecast” for ~s is not directly useful to us; the forecast ofa position vector ~r from the center of mass of Earth would be much more useful.
We write~s = ~s + ~r (11.21)
where ~s is the position of the center of mass of Earth. Using (11.21) and (11.20) in (11.19),
d2~s
dt2=
d2~sdt2
+d2~r
dt2= ~g + ~gs + ~A (11.22)
ord2~r
dt2= ~g + ~gs + ~A− d2~s
dt2. (11.23)

108 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
The center of mass accelerates only by forces external to the system, an average of ~gs overall the bits and pieces mν of the Earth.:
d2~sdt2
=
∑νmν~gs∑νmν
. (11.24)
Only if ~gs were exactly uniform (constant) would the following residual be zero for allpositions on Earth:
~gtide ≡ ~gs −d2~sdt2
. (11.25)
But ~gs is not uniform, because of the inverse square law of gravity, so ~gtide 6= ~0.
Figure 11.3: The Earth is on theleft and the center of the sun is thedot on the right. The plane of thepicture is for any plane that containsthe center of the Earth and the Sun.
For the purpose of calculating ~gtide, we need to cal-culate ~gs on the surface of the Earth, accounting forthe fact the α is small but not zero, and L is slightlydifferent from RES:
~gs =GMS
L2[cos(α)ı− sin(α)] . (11.26)
Using the law of cosines:
L2 = R2ES +R2
E − 2RERES cos(θ) . (11.27)
Knowing that RE/RES is close to zero,
1
L2=
1
R2ES
1(1− 2 RE
REScos(θ) +
R2E
R2ES
)≈ 1
R2ES
(1 + 2
RE
RES
cos(θ)
). (11.28)
In that same limit:
sin(α) ≈ α ≈ RE sin(θ)
RES
, (11.29)
cos(α) ≈ 1− 1
2α2 ≈ 1− 1
2
R2E sin2 (θ)
R2ES
. (11.30)
Using these above approximations in (11.26):
~gs =GMS
R2ES
(1 + 2
RE
RES
cos(θ)
)[(1− 1
2
R2E sin2 (θ)
R2ES
)ı− RE sin(θ)
RES
]. (11.31)
Now (11.24) is very close to the ~gs at the center of Earth:
d2~sdt2
=GMS
R2ES
ı . (11.32)

11.2. TIDAL FORCES 109
So using (11.25), and neglecting terms proportional to (RE/RES)n where n > 1,
~gtide = ~gs −d2~sdt2
=GMS
R2ES
RE
RES
[2 cos(θ) ı− sin(θ) ] . (11.33)
Figure 11.4: Depiction of the vector tidal force ~gtide from (11.33) on the surface of a sphere.
Here are the “raw” calculations of the gravitational accelerations caused by the moon andthe sun. For the Earth-Sun distance we use R = RES , and for Earth-Moon distance we useR = REM .
• The magnitude from the sun: GMS
R2ES
= .0059 m s−2.
• The magnitude from the moon: GMM
R2EM
= 3.3× 10−5 m s−2.
The above “raw” numbers are large: .0059 m s−2 is a large meteorological acceleration. If,as the sun was coming up over the horizon, and air was accelerating with this value, therewould be 65 m s−1 wind toward the sun by mid-morning.
Next we calculate the tidal force, in particular the maximum value of ~gtide using (11.33).For application to the far and near side of Earth,
• The magnitude of the tidal force from the sun: GMS
R2ES
2RERES
= 5.05× 10−7 m s−2
• The magnitude of the tidal force from the moon: GMM
R2EM
2REREM
= 1.11× 10−6 m s−2
We note that both tidal force magnitudes are much more tame than the raw magnitudes,and not significant in meteorology. Despite the “raw” gravitational force from the moonbeing the weaker of the two, the proximity of the moon to Earth makes the moon’s tidalforce larger than the sun’s tidal force — about twice as large.
In the Earth’s oceans, the lunar tides are twice the size of the solar tides. From the moongtide ≈ 10−7g. A horizontal force of this magnitude in the ocean can be be balanced by aslope of the ocean surface (rise over run) of 10−7. A quarter of the circumference of Earth is≈ 107 m, so the equilibrium height of the ocean tide is ≈ 1 m. A change of sea level by ≈ 1 mat the mouth of a shallow bay may cause a large current into and out of the bay. Now for themeteorology: a displacement of the equilibrium height of a pressure surface of ∆h = 1 m inthe atmosphere would give a pressure increase of: gρ∆h = 10 m s−2 × 1 kg m−3 × 1 m =10 Pa = .1 mb. Such changes in pressure are not very significant in atmospheric motion.

110 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
From the Glossary of Meteorology entry for lunar atmospheric tide:
The amplitude of this atmospheric tide is so small, about 0.06 mb in the Tropicsand 0.02 mb in middle latitudes, that it is detected only by careful statisticalanalysis of a long record.
Figure 11.5: Atmosphere tides seen in surface measurements from the Lesser Antilles. FromDr. Jeff Masters’ WunderBlog. This tide is not a gravitational tide, but a “tide” resulting fromsolar heating. Note two cycles per day, which is peculiar since the cause is solar heating.
Here is another quote from the web:
Careful analysis of pressure data shows a lunar tide of about 0.09 hPa near theequator, decreasing to the north and south. This is about 0.01% of the totalpressure...
The solar “tide” is really a combination of a small gravitational effect and amuch larger heating effect. Near the equator the effects can be seen clearly onbarographs as an oscillation of about 2 hPa either side of the average pressure.

11.3. ROTATING REFERENCE FRAMES 111
Maxima occur at about 1000 and 2200 hours local time with minima at 0400 and1600. In mid-latitudes the variation is about 0.7 mb and is usually hidden by themuch larger effects of weather systems.
The effects of the solar tide upon winds and weather systems are very smallamounting to small fractions of a knot in wind speed. At great heights in thestratosphere winds due to solar effects can be very large but still have negligibleeffects on our weather. Similarly, tidal effects from other planets are extremelyand immeasurably small.
In meteorology, the knowledge of tidal magnitudes is mainly to filter the tidal effect outof pressure measurements, before such pressure data is used to initialize numerical weatherprediction models. Such models don’t have the tidal mechanism built in. If the model doesn’thave the mechanism, the ingest of tidal pressure data into it would initiate a spurious gravitywave.
11.3 Rotating reference frames
ı
Iθ
J
Figure 11.6: A rotating merry-go-round with red unit vectors on thesurface of the merry-go-round andblack unit vectors on the Earth’s sur-face.
The classic example of a rotating coordinate systemis a merry-go-round, the sort found at a childrens’playground. Here we ignore the meteorologically sig-nificant Coriolis force found in Earth’s playgrounds,and assume the playground provides an inertial ref-erence frame for our practical experiments with ballsand pucks. On a flat merry-go-round, relative to thecoordinates drawn on the merry-go-round, frictionlesshockey pucks do not travel in straight lines, and thrownballs do not travel in parabolic arcs. Nevertheless, tra-jectories may still appear straight and parabolic to ob-servers off the merry-go-round, but not on.
As we did for the accelerating truck, we develop a prog-nostic equation with inertial forces that can be usedto forecast within merry-go-round coordinates. Con-sider a position vector ~r, measured from the axis ofthe merry-go-round. Described with basis vectors ofthe inertial Cartesian coordinate system of the Earth’s
surface we write:
~r = xı+ y+ zk . (11.34)
The velocity and acceleration vectors, using the inertial basis, are:
~v =d~r
dt=
dx
dtı+
dy
dt+
dz
dtk (11.35)

112 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
~a =d2~r
dt2=
d2x
dt2ı+
d2y
dt2+
d2z
dt2k =
1
m~F real (11.36)
Suppose we draw I and J on the surface of the merry-go-round, and let K = k. The samevector ~r can also be written:
~r = X I + Y J + ZK (11.37)
The particular rotation we investigate is
I = cos(θ) ı+ sin(θ) (11.38)
J = − sin(θ) ı+ cos(θ) (11.39)
You have seen this before, but with constant θ in the discussion of alternative orientation ofthe coordinate system. Here we consider θ = Ωt, or constant rotation.
Knowledge of X(t), Y (t) and Z(t) is often more useful than knowledge of x(t), y(t) and z(t).Knowledge of where objects (or air parcels) are moving relative to fixed features of merry-go-round (or Earth), is more useful than what trajectories look like to external observers.To obtain prediction of X(t), Y (t) and Z(t), one possibility is to first solve for x(t), y(t)
and z(t) with a solution to m~a = ~F , and then convert that solution to X(t), Y (t) andZ(t). Alternatively, we could formulate prognostic equations for rotating coordinates, with
fictitious forces or inertial forces included in ~F . We could then attempt to calculate directlythe trajectories X(t), Y (t) and Z(t).
This is sometimes, but not always, the most computationally efficient procedure. For the flatmerry-go-round, in turns out that computing with fictitious forces is NOT the most efficientway to find X(t), Y (t) and Z(t). This is ironic because the merry-go-round is often presentedas the archetypal example for dynamics in a rotating reference frame. On the other hand,almost ALL of dynamical meteorology is computed using fictitious forces.
We shall see later that a rotating Earth is different from a flat merry-go-round in that theshape of the Earth has adjusted to an oblate-spheroid shape, so stationary objects can remainat rest when on “horizontal” surfaces. On a merry-go-round, a frictionless object placed onthe surface cannot remain at rest. This distinction is what leads to efficiency of computingmeteorology within the rotating reference frame.
Back to the merry-go-round. The rotating frame is related to the inertial frame:
I = cos (Ωt) ı+ sin (Ωt) (11.40)
J = − sin (Ωt) ı+ cos (Ωt) (11.41)
K = k (11.42)
We can show from these definitions that:
dI
dt= ΩJ (11.43)
dJ
dt= −ΩI (11.44)
dK
dt= ~0 (11.45)

11.3. ROTATING REFERENCE FRAMES 113
Starting with the position vector
~r = X I + Y J + ZK (11.46)
the velocity vector is
d~r
dt=
dX
dtI +X
dI
dt+
dY
dtJ + Y
dJ
dt+
dZ
dtK + Z
dK
dt(11.47)
ord~r
dt=
dX
dtI +XΩJ +
dY
dtJ− Y ΩI +
dZ
dtK . (11.48)
We continue on to derive the acceleration vector:
d2~r
dt2=
d
dt
(dX
dtI +XΩJ +
dY
dtJ− Y ΩI +
dZ
dtK
)(11.49)
which yields:
d2~r
dt2=
d2X
dt2I +
d2Y
dt2J +
d2Z
dt2K
+ 2dX
dtΩJ− 2
dY
dtΩI− Ω2X I− Ω2Y J . (11.50)
For those living on the merry-go-round, the practical velocity, the velocity “as seen” by theobservers is:
dX
dtI +
dY
dtJ +
dZ
dtK . (11.51)
This is the velocity needed to predict where objects are moving to on the merry-go-round,meaning to predict X(t), Y (t) and Z(t). Likewise, the practical acceleration needed topredict (11.51) is:
d2X
dt2I +
d2Y
dt2J +
d2Z
dt2K . (11.52)
Recall the playground reference frame is assumed to be inertial, so
d2~r
dt2=
1
m~F real . (11.53)
So using (11.50) in the above,
d2X
dt2I +
d2Y
dt2J +
d2Z
dt2K
+ 2dX
dtΩJ − 2
dY
dtΩI − Ω2X I − Ω2Y J =
1
m~F real (11.54)
So, the equation for making practical dynamical predictions on the merry-go-round is:
d2X
dt2I +
d2Y
dt2J +
d2Z
dt2K =
1
m~F real +
1
m~F fictitious (11.55)

114 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
where the fictitious forces are:
1
m~F fictitious = −2
dX
dtΩJ + 2
dY
dtΩI + Ω2X I + Ω2Y J (11.56)
The first two terms are called the Coriolis force, and the last two terms are called thecentrifugal force.
Fictitious forces do not obey Newton’s third law. Consider the following experiment. Youlook up at the night sky and start spinning. You see massive stars in rapid circular motion,with an extremely large radius, requiring an astonishing large centripetal force mrω2. Whereis the equal and opposite force, as required by Newton’s third law? If your spinning hasgenerated real forces, then stars that have an orbit centered on your head would cause itto explode like an H-bomb. So, if that does happen to you, be rest assured that you havegenerated real forces.
11.3.1 General vector language for the inertial forces
Next we generalize what we have learned using the language of vectors. Essentially, our nextgoal is to “cover up” the specific coordinate system used for our derivation: the X, I, . . . .The velocity vector (11.47) can be written with a cross product:
d~r
dt=
dX
dtI +
dY
dtJ +
dZ
dtK + ΩK×
(X I + Y J + ZK
)(11.57)
The vector derivative “as seen in the rotating frame” can be defined with ddt
.
d~r
dt=
dX
dtI +
dY
dtJ +
dZ
dtK (11.58)
This is the practical information needed to describe movement relative to items fixed in the
rotating reference frame. A procedural definition of ddt
is that, for the rotating Cartesian
unit vectors, ddt
I = ~0, ddt
J = ~0 and ddt
K = ~0.
An axis of rotation is the set of points that are stationary in both coordinate systems. Therotation vector ~Ω is parallel to the axis of rotation. The choice between the two possibledirections that are parallel is determined by a right-handed rule: with the thumb of the righthand pointing like ~Ω, the fingers wrap in the direction that the particles are moving. Themagnitude of the rotation vector is the angular velocity of a point in the rotating coordinatesystem, relative to the non-rotating coordinate system. In other words, if you are looking atanticlockwise rotation, ~Ω points toward you. Here we have used:
~Ω = ΩK . (11.59)
It is important to note that ~Ω does not completely describe the rotation. At least one pointon the axis of rotation must be given, so that displacement from the rotation axis ~R can beknown. Here, the origin of the rotating coordinate system has been placed on the rotation

11.4. A SECOND DERIVATION 115
axis. Therefore the “displacement from the axis of rotation” is simply the position vectorminus the component in the direction of Ω. So here
~R = X I + Y J . (11.60)
With these definitions, the velocity vector in the inertial frame(11.57), can be written as:
d~r
dt=
d~r
dt+ ~Ω× ~r . (11.61)
The figure on the left demonstrates the term ~Ω× ~r by itself,
with d~rdt
= 0. Furthermore, the figure is a special case, in
which ~r happens to be in the plane of the rotation |~Ω× ~r| = Ωr
This next figure is generalized to show the classic textbookfigure, demonstrating the effectiveness of the cross product incapturing the distance from the rotation axis, R, independentof the origin for ~r. We see |~Ω× ~r| = Ωr sin(α) = ΩR, where
α is the angle between ~r and ~Ω.
Next we note that the acceleration (11.50) can be written in a coordinate-free way as:
d2~r
dt2=
d2~r
dt2+ 2~Ω× d~r
dt− Ω2 ~R . (11.62)
In applications of ~a = 1m~F (leaving the subscript “real” implied), we could write
d2~r
dt2+ 2~Ω× d~r
dt− Ω2 ~R =
1
m~F . (11.63)
ord2~r
dt2=
1
m~F − 2~Ω× d~r
dt+ Ω2 ~R (11.64)
11.4 A second derivation
Let’s derive (11.64) again, the classic textbook way. We have accepted this applies to aposition vector:
d~r
dt=
d~r
dt+ ~Ω× ~r . (11.65)
Similarly, given the definition of ddt
, any vector can be so represented, including ~v:
d~v
dt=
d~v
dt+ ~Ω× ~v . (11.66)

116 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
Now using ~v = d~rdt
from (11.65) in (11.66),
d~v
dt=
d
dt
(d~r
dt+ ~Ω× ~r
)+ ~Ω×
(d~r
dt+ ~Ω× ~r
)(11.67)
Now remember that ddt
simply means “do not differentiate the rotating unit vectors (that
has already been accounted for in the ~Ω terms)”. ddt
will be distributive over a sum:
d~v
dt=
d2~r
dt2+ ~Ω× d~r
dt+ ~Ω× d~r
dt+ ~Ω×
(~Ω× ~r
)(11.68)
Next we use (3.60) on the final term:
d~v
dt=
d2~r
dt2+ 2~Ω× d~r
dt+ ~Ω
(~Ω · ~r
)− Ω2~r (11.69)
d~v
dt=
d2~r
dt2+ 2~Ω× d~r
dt− Ω2
(~r −
~Ω
Ω
~Ω · ~rΩ
)(11.70)
d~v
dt=
d2~r
dt2+ 2~Ω× d~r
dt− Ω2 ~R (11.71)
where
~R ≡ ~r −~Ω
Ω
~Ω · ~rΩ
. (11.72)
The above is the statement that ~R is ~r minus the component of ~r in the direction of ~Ω.
11.4.1 The vector equation of motion
In applications of d~vdt
= 1m~F , we can use (11.71) and write
d2~r
dt2+ 2~Ω× d~r
dt− Ω2 ~R =
1
m~F (11.73)
d2~r
dt2=
1
m~F − 2~Ω× d~r
dt+ Ω2 ~R (11.74)
The fictitious forces on the right are the Coriolis force and the centrifugal force.
Next we move on to another innovation for meteorology, which provides a way to includeΩ2 ~R as a form of gravity. Let
1
m~F = ~g + ~A (11.75)
where ~A is simply all other real forces, per unit mass, other than gravity.
d2~r
dt2= ~g + ~A− 2~Ω× d~r
dt+ Ω2 ~R (11.76)

11.4. A SECOND DERIVATION 117
Both ~g and Ω2 ~R are time-invariant, and axisymmetric. These terms are commonly combinedtogether as effective gravity:
~ge ≡ ~g + Ω2 ~R (11.77)
The magnitude of the centrifugal force is less than 1% of g. ~ge is normal to the oblatespheroid of the Earth, meaning exactly normal to the sea-level surface.
d2~r
dt2= −2~Ω× d~r
dt+ ~ge + ~A . (11.78)
We next drop the cumbersome ˜ and leave it as implied. (The default analysis in meteorologyis to work with the rotating frame — so let’s get rid of the tilde!).
d2~r
dt2= −2~Ω× d~r
dt+ ~ge + ~A . (11.79)
The velocity vector, as seen to an observer on Earth, can be written
d~r
dt= ~U = uı+ v+ wk . (11.80)
where the unit vectors are in the zonal, meridional and vertical directions respectively.
Note we are making a transition from the tradition of using ~v for the velocity vector, asis common in introductory physics textbooks, to using ~U for the velocity vector, which iscommon in meteorology textbooks. One reason for this is that the symbol v, which weuse for the meridional velocity component, could otherwise be misinterpreted as |~v|. Thetime-derivatives of the unit vectors, relative to the “fixed stars”, has already been accountedfor in the Coriolis force and centrifugal force terms that were derived. We treat these unitvectors as they appear to us: at a fixed point, they do not change in time.
Now heed this warning! If a local polar coordinate system is applied:
~U = vrr + vθθ + wk (11.81)
then d~Udt
will need to account for the movement of r and θ relative to ı and . An additionalcentripetal acceleration term will appear: keep in mind the ~ge is “hiding” only one particularcentripetal acceleration term.
Likewise, as we stray from a local analysis of a thunderstorm, to, for example, analysis of alarge-scale baroclinic wave, we need to account for how ı, and k change direction because ofthe sphericity of the Earth (but not because of rotation — that has already been accountedfor). Happily, a lot of meteorological analysis can be achieved with the assumption that theEarth is flat. Even the analysis of baroclinic waves doesn’t suffer too much with a flat Earth.
Often, the “all other real forces” term ~A, for much of the atmosphere, is just the pressuregradient force:
~A = −1
ρ∇p (11.82)

118 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
The equation of motion for much of the atmosphere is simply:
d~U
dt= ~U × 2~Ω + ~ge −
1
ρ∇p (11.83)
The Coriolis force (per unit mass) ~U × 2~Ω is of great significance in meteorology. We arefortunate that it is so simple to include in our models.
11.5 The dominant terms in the Coriolis force
We next resolve the Coriolis force (per unit mass) ~U × 2~Ω
into a form useful for meteorology. The rotation vector ~Ω,resolved into the components of a local Cartesian coordinatesystem is:
~Ω = Ω sinφ k + Ω cosφ , (11.84)
where φ is latitude.
~U × 2~Ω (11.85)
= 2Ω(uı+ v+ wk
)×(
sinφk + cosφ)(11.86)
= 2Ω(u sinφı× k + u cosφı× (11.87)
+v sinφ× k + w cosφk× )
(11.88)
= 2Ω(−u sinφ+ u cosφk + v sinφı− w cosφı
)(11.89)
= 2Ω sinφ (vı− u) + 2Ω cosφ(uk− wı
)(11.90)
Both of the terms proportional to 2Ω cosφ are not significant in meteorology. The termwith uk is in the vertical, and very small compared with gravity and the pressure gradientforce. The term proportional to w is horizontal, but small compared to the horizontal termsproportional to either u or v, because w is small compared to u and v. So
~U × 2~Ω ≈ 2Ω sinφ (vı− u) (11.91)
Continuing with the approximate form,
2Ω sinφ (vı− u) = 2Ω sinφ (uı+ v)× k (11.92)
= ~V × f k (11.93)
where ~V is the horizontal wind vector:
~V ≡ uı+ v (11.94)

11.5. THE DOMINANT TERMS IN THE CORIOLIS FORCE 119
and f is the Coriolis parameter:f ≡ 2Ω sinφ . (11.95)
The length of day relative to the stars is a sidereal day or 23 hours, 56 minutes, 4.1 seconds.
Ω =2π
86164 s= 7.292× 10−5 s−1 (11.96)
f = 2 sin (φ) Ω ≈ 10−4 s−1 (11.97)
|~V × f k| = fV (11.98)
A typical value of V = 10 m s−1, so a typical value of the Coriolis acceleration is fV =10−3 m s−2 Recall that a typical value of |1
ρ∂p∂x| is∣∣∣∣1ρ ∂p∂x
∣∣∣∣ =1
1 kg m−3
1000 Pa
1000 km= 10−3 m s−2 (11.99)
In summary, the dominant Coriolis force is ~V × f k.
• Proportional to horizontal windspeed V .
• Acts in the horizontal, to the right of the horizontal wind vector in the NH, and to theleft in the SH.
• Has magnitude f = 2Ω sin(φ) where φ is latitude. Increases in magnitude toward thepoles.
• Typical magnitude is 10−3 m s−2, the same order of magnitude as the horizontal pres-sure gradient force.
The equation of motion for the horizontal wind vector can be written:
d~V
dt= ~V × f k− 1
ρ∇
Hp . (11.100)
Or, using (7.62),
d~V
dt= ~V × f k− g∇pZ . (11.101)
11.5.1 Coriolis force on a car
Calculating the effect of a Coriolis force on a moving car is very similar to calculating thetypical effect on air in the atmosphere. Assume a car is travelling toward the east on LindseySt. with speed V = 10 m s−1. Assume the car is travelling over an icy, frictionless section ofthe road that is exactly horizontal. “Exactly horizontal” means the road surface is normalto ~ge; if the car was stationary, it could remain stationary. After 10 s , by how much is thecar deflected toward the south?
f = 2Ω sin(35) = 0.000083 s−1 (11.102)

120 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
a = fV = 0.000083 s−1 10 m s−1 = 0.00083 m s−2 (11.103)
The deflection is
d =1
2at2 = 0.0415 m = 4.15 cm (11.104)
Suppose instead the road slopes downward to the left with an angle θ relative to horizontal.What angle θ would allow the car to go straight, undeflected by the Coriolis force?
g sin (θ) = fV cos (θ) (11.105)
For small θ, the above is
θ =fV
g= 8.46× 10−5 ≈ 10−4 . (11.106)
Such a slope would be undetectable by merely looking at it; the road would appear veryclose to begin horizontal.
11.6 Explanations for a Coriolis force
We have derived the Coriolis force with a heavy dose of calculus and vector analysis. Acareful derivation is useful in that, perhaps, it gives us more confidence in the result. Theresult was ultimately very simple. Perhaps a simple result has a simple explanation?
How is an explanation different from a derivation? An explanation is more qualitativerather than exact, establish bounds on what can happen, rather than describes exactly whathappens. An explanation is often verbal. A satisfying explanation usually invokes truths orfacts that are already accepted by the user of the explanation.
The Coriolis force can be explained in terms of two physics concepts that we experience inour daily lives: conservation of angular momentum and centrifugal force. This explanationwill be for the Coriolis force on a parabolic merry-go-round, rather than for the oblate-spheroid Earth. The goal here is explanation: the hope is that the merry-go-round is easierto conceive than the Earth. Not only that, such parabolic merry-go-rounds have actuallybeen made as a laboratory apparatus for meteorology students (but at MIT, rather thanOU).
The merry-go-round is rotating with anangular velocity Ω. We take Ω > 0,to give an analog to the northern hemi-sphere of Earth. A particular Ω putsthe effective gravity exactly normal tothe parabolic surface. Alternatively, theparabolic surface could come into beingif it were the surface of a rotating liquid,that was then solidified after it came into
equilibrium with the rotation. A puck could remain at rest on such a surface even without

11.7. SUMMARY 121
friction: a tangent inward gravity force balances the tangent outward centrifugal force. Inother words, downslope real gravity must be equal to the upslope centrifugal force (for thestationary puck):
sin(θ)g = cos(θ)Ω2R (11.107)
where θ (in this figure) is the conventional slope angle,
tan(θ) =dz
dR=
Ω2R
g. (11.108)
The solution for z is a parabola:
z =1
2
Ω2R2
g(11.109)
Let ω be the angular frequency of the puck as ob-served from the inertial reference frame. The puck isinitially stationary on the merry-go-round, so initiallyω = Ω. A radially inward or outward impulse is thengiven to the puck. Rightward deflection of the puckoccurs because of conservation of angular momentum:ωR2 = ΩR2
o. For an inward impulse, ω will increase asR decreases. For an outward impulse, ω will decrease
as R increases. In either case, relative to the merry-go-round surface, the puck is deflectedto the right.
Now consider the puck is given an impulse along a lat-itude circle. Rightward deflection of the puck occursbecause the balance between centrifugal force and in-ward gravity is “upset”. Recall the shape of the merry-go-round is designed to prevent radial acceleration forω = Ω. For ω > Ω, the centrifugal force is greaterthan downhill gravity, and the puck accelerates out-ward. For ω < Ω, the centrifugal force is less than
downhill gravity, and the puck accelerates downhill, radially inward. In both cases, thedeflection is rightward.
This explanation provides for the rightward deflection of any direction of horizontal motion.The fact that acceleration is proportional to speed, with the same constant of proportionalityfor any direction, requires a more formal quantitative analysis. To explain that, this expla-nation would need to be turned into a derivation, so our explanation falls short of explainingeverything about the Coriolis force.
11.7 Summary
In this course on meteorology, we diverted into a nontraditional consideration of tides. We didnot expect to discover that all previous meteorology theory was negligent, and indeed we did

122 CHAPTER 11. NON-INERTIAL REFERENCE FRAMES
not discover that. Rather, we confirmed tidal forces are not important for the atmosphere. Aone meter deflection of an isobaric surface is rather inconsequential in atmospheric dynamics.The atmosphere being a compressible gas, there are other means to make more consequentialdeflections. In the oceans, a one meter deflection of sea level near the coast can be a dominantmechanism for making a current, even more so if the deflection is amplified by resonating inan appropriately shaped estuary.
The rotation of the Earth provides the only significant inertial forces (fictitious forces) foratmospheric dynamics. After a thorough workout with vector analysis, we arrive at hydro-static, inviscid equations of motion in a rotating reference frame that include a Coriolis forceand a centrifugal force. Although the centrifugal force is larger than the Coriolis force, itseffect is merely to change the magnitude of gravity by at most 0.34% (near the equator) andthe direction we refer to as vertical by at most 0.15 degrees (in midlatitudes). As we shallsee in the remaining chapters, the smaller Coriolis force will be have great consequences inatmospheric dynamics.
We claim the following equation of motion for the horizontal wind vector ~V is appropriatefor about 90% of the atmosphere. We recap (11.100):
d~V
dt= ~V × f k−∇pΦ (11.110)
and its hydrostatic companion with an accurate effective gravity ge:
dp
dz= −geρ . (11.111)
Or we use the approximate version (11.101), with a constant acceleration due to gravity g:
d~V
dt= ~V × f k− g∇pZ (11.112)
and its hydrostatic companion:dp
dZ= −gρ . (11.113)

12 The Gradient Wind
Gradient wind balance is perhaps a rather clumsy name for applying the equation of motion(in particular, the horizontal component transverse to the wind vector) as a balance betweenCoriolis force, pressure gradient force, and centripetal acceleration. Gradient wind balance issimply the study of the curves in trajectories of the horizontal wind. In which direction willthe wind curve? What will be the radius of curvature? One might expect that these sort ofquestions will have only mundane answers. However, we will find the study of gradient windbalance yields some very profound concepts that form the bedrock of dynamical meteorology.
In this picture, we see a trajectory curving to the leftbecause the pressure gradient force to the left exceedsthe Coriolis force to right. The centripetal accelerationcan be diagnosed with knowledge of the speed V andthe radius of curvature R. The radius of curvature canbe diagnosed by fitting a circle tangent to a point onthe trajectory, a process which is identical to drawingtwo transects to the trajectory and noting their pointof intersection. However, the transects would have to
be the limit of two neighboring points on the trajectory, to be consistent with the notion offitting a circle tangent to the trajectory. By the way, we ignore any errors in determiningthe radius of curvature R that result from the map projection not faithfully representing theactual curvature.
Recall we have already studied cyclostrophic wind balance in the context of tornado modeling,in Section 10.2.4. Cyclostrophic wind balance is simply gradient wind balance in the absenceof a significant Coriolis force. In Section 10.2.4, the radial component of pressure gradientforce supplies the centripetal acceleration:
− ω2r = −1
ρ
∂p
∂r. (12.1)
Or, writing the azimuthal velocity component as v = ωr (omitting the subscript in vθ forbrevity, throughout this chapter):
− v2
r= −1
ρ
∂p
∂r. (12.2)
123

124 CHAPTER 12. THE GRADIENT WIND
Now let’s include the Coriolis force in the above equations. For motion around a circle, inour convention for polar coordinates, the Coriolis force is radially outward for ω > 0 (anti-clockwise, cyclonic) and radially inward for ω < 0 (clockwise, anti-cyclonic). Including theCoriolis force in the above equations gives a gradient wind relation:
−ω2r = frω − 1
ρ
∂p
∂r
−v2
r= fv − 1
ρ
∂p
∂r. (12.3)
If you are hesitant about simply inserting the Coriolis terms, frω or fv, based on the simplerules about its magnitude and direction, those terms can be calculated rigorously by simplyapplying ~V × f k in the coordinate system of our choice (polar):
~V × f k =(vrr + vθθ
)× f k
= −fvrθ + fvθr . (12.4)
Hence the fvθ term, which we write as fv, in (12.3).
Note that we choose to drop down a polar coordinate system for our convenience, definedby the fitted tangent circle. That choice will make make vr = 0 for the small piece of anycurved trajectory. Also, with this choice, the radius of curvature R is identical to the radialcoordinate r.
Variation of f with latitude could make f variable along a trajectory. This variation can beignored if the analysis is restricted to a short sector of a trajectory. Here we will be ignoringvariations in f , even for large excursions around a circular trajectory. The approximationsof both assuming f is constant and doing the analysis on a flat map (rather than a sphericalEarth) are collectively known as the f -plane approximation.
Some rather pure depictions of the gradient wind balance exclude variation of pressure inthe direction of motion. The wind vector is tangent to the isobars; there is no pressuredifference between the “front” and “back” of parcels. So the speed V does not change asthe parcel moves downstream. These depictions look like axisymmetric vortices with purelyradial pressure gradients, like idealized hurricanes. These pure depictions are useful, butwe should not let them restrict our ability to see the usefulness of applying gradient windbalance to any portion of a general trajectory, completely circular or otherwise, parallel toisoheights or otherwise. As novices with the gradient wind concept, we will emphasize theclassical “complete circle” image in our first study of (12.3).
In either version of (12.3), there are three terms. We first consider three classes of solutionsdefined by the dominance of two of the terms, with the third being insignificant. Thethree classes are: the cyclostrophic balance (Coriolis force neglected), the geostrophic balance(centripetal acceleration neglected), inertial oscillations (pressure gradient force neglected).As already stated, cyclostrophic balance was studied in Section 10.2.4. It is important tonote the justification of cyclostrophic analysis is that |ω| >> |f |, in which case (12.3) is:
− ω2r = −1
ρ
∂p
∂r(12.5)

12.1. INERTIAL OSCILLATIONS 125
We now move on to a study of the other two classes: geostrophic balance and inertialoscillations.
12.1 Inertial oscillations
In the limit of negligible pressure gradient force, (12.3) is:
− ω2r = frω. (12.6)
This solution is known as an inertial oscillation:
ω = −f (12.7)
v = ωr = −fr (12.8)
r = −vf. (12.9)
Although we began this chapter with the intention of applying the equations to a fluid, thisinertial oscillation solution has no effect of pressure, and so also applies to hockey puckson a frictionless horizontal surface. The inertial oscillation is simply a constant turning tothe right of the horizontal velocity vector by the Coriolis force. The Coriolis force doesno work, the magnitude of the wind vector does not change. The parcel of air, or hockeypuck, will eventually complete a circular orbit. For example, with v = −10 m s−1 andf = 10−4 s−1, the radius of the anticyclonic circular orbit is r = 100 km, the angularfrequency is ω = −10−4 s−1, and the period of the orbit 2π/ω = 17.45 hr.
For inertial oscillations to happen in the atmosphere, very large horizontal sheets would needto have all of its parcels oscillating in unison, lest they bump into each other and cause apressure gradient force to arise. Something like this actually does happen, in a phenomenonknown as the low-level jet.
12.2 Geostrophic wind
The opposite limit to cyclostrophic balance is |ω| << |f |. The term on the left (centripetalacceleration) in (12.3) becomes negligible, and we have the geostrophic limit:
0 = fv − 1
ρ
∂p
∂r. (12.10)
An assumption of straight flow, with radius of curvature → ∞, produces the same limit.The polar coordinate system certainly appears rather ill-suited for flow that is straight. Nev-ertheless, if we approach (12.10) as a definition of the geostrophic wind vg, as a hypothetical

126 CHAPTER 12. THE GRADIENT WIND
wind that could allow the Coriolis force to be equal and opposite to the pressure gradientforce, then (12.10) could be written:
fvg ≡1
ρ
∂p
∂r. (12.11)
With (12.11), we can write (12.3) as:
−v2
r= f(v − vg) , (12.12)
which is sometimes useful. Note that if further define ωg = vg/r, the (12.12) takes a verycompact form (too compact and too obscure for most students):
ω2
f 2+ω
f=ωgf
(12.13)
Now, ωg is the angular frequency along the trajectory that would occur if the wind weregeostrophic, while ω is what is actually consistent with the requirement for centripetal accel-eration. Now f is projection of Ω in the vertical, times a factor of 2, which at mid-latitudesmakes f ≈ Ω. We deduce from that when |ω/f | << 1, or in other words when the time tocomplete an entire circular orbit (imagining the curvature continues into a complete circle)would be much greater than a day, we will find that ω ≈ ωgand v ≈ vg. This is in fact thecase for the large-scale curved flows in mid-latitudes.
12.2.1 Vector definition of the geostrophic wind
The vector form of the geostrophic wind definition allows more generality. We start with theequation of motion:
d~V
dt= f ~V × k− 1
ρ∇
Hp . (12.14)
We define ~V g to be the wind vector that provides a Coriolis force that exactly balances thepressure gradient force:
f ~V g × k ≡ 1
ρ∇
Hp . (12.15)
In meteorology we make the geostrophic approximation ~V ≈ ~V g when∣∣∣∣∣d~Vdt∣∣∣∣∣ << ∣∣∣f ~V × k
∣∣∣ . (12.16)
Even if ~V is not close to ~V g, the equation of motion
d~V
dt= f ~V × k− 1
ρ∇
Hp . (12.17)

12.3. RETAIN ALL 3 TERMS 127
can be writtend~V
dt= f ~V × k− f ~V g × k (12.18)
d~V
dt= f
(~V − ~V g
)× k . (12.19)
Note that only the ageostrophic component of the wind, or ~V − ~V g, can cause ~V to change.
Using the vector identity for the triple vector product, we can formally solve (12.15) for ~V g:
k×(f ~V g × k
)= k× 1
ρ∇
Hp (12.20)
~V g = k× 1
ρf∇
Hp . (12.21)
Or maybe you can simply “see” the various cross product relations that are implied by thethree orthogonal vectors in (12.15) and (12.21), rather than invoking a vector identity totransform one to the other. This is the essential geometry to recognize: in the northernhemisphere, where f > 0, both (12.15) and (12.21) put higher pressure (or heights) to theright of the geostrophic wind vector. Recall we can also express the pressure gradient termusing the height of an isobaric surface.
~V g = k× gf∇pZ . (12.22)
As you may know, in the upper levels of much of the extra-tropical atmosphere, ~V ≈ ~V g.This fact has enormous impact on extra-tropical dynamics and on the mathematical modelsthat we derive for its analysis. For example, the most relevant solutions of (12.3), theso-called “regular” solutions presented in the next section, have v ≈ vg.
12.3 Retain all 3 terms
Now we retain all the terms in (12.3). With each term divided by f 2r, (12.3) can be writtenas:
ω2r
f 2r+frω
f 2r=
1
ρrf 2
∂p
∂r. (12.23)
This simplifies toω2
f 2+ω
f=
1
ρrf 2
∂p
∂r, (12.24)
which allows us to ponder the gradient wind solutions as solutions for dimensionless ratios.A plot of ω
fas a function of 1
ρrf2∂p∂r
will yield a parabola, as seen in Figure 12.1. We canfacilitate our plot by “completing the square” on the left:
− 1
4+
(ω
f+
1
2
)2
=1
ρrf 2
∂p
∂r(12.25)

128 CHAPTER 12. THE GRADIENT WIND
12.3.1 Limits on high pressure cyclones
The gradient wind relation written as (12.25) allows us to immediately deduce the maximumrate at which pressure can decrease with distance in a high-pressure system. This maximumrate is
1
rρf 2
∂p
∂r= −1
4, (12.26)
which is the minimum point of the parabola in Figure (12.1). We solve p(r) with
∂p
∂r= −rρf
2
4, (12.27)
which has a solution
p(r)− p(0) = −1
8r2ρf 2 . (12.28)
For r = 2000 km, ρ = 1 kg m−3 and f = 10−4 s−1,
p(2000 km)− p(0 km) ≈ −40 mb (12.29)
High pressure systems can have significant magnitude only if they are very big. No suchlimit occurs on low pressure systems. This is one of those “profound results” that comes outof gradient wind analysis.
12.4 Solving the quadratic equation
It is somewhat curious that introductory meteorology texts are drawn to (12.3) primarily asan exercise in solving for v (or ω), rather than ∂p
∂r. Perhaps, like moths drawn to a flame, our
mathematical upbringing gives us an instinct to approach the study of (12.3) as an exercisein the quadratic formula. But (12.3) does not need to be solved as a quadratic to provideuseful information, as for example in analysis of limits on high pressure cyclones.
Keeping in mind the warning about the moth and the flame, we now follow the traditionof applying the quadratic formula to (12.3). We assume 1
ρ∂p∂r
, r and f are specified in the
gradient wind relation (12.3), the unknown ω or v could be obtained as a solution to aquadratic equation:
ω = −f2±
√f 2
4+
1
rρ
∂p
∂r(12.30)
v = −fr2±
√f 2r2
4+r
ρ
∂p
∂r(12.31)
Note ω1 + ω2 = −f and v1 + v2 = −fr. Solutions for ω or v will be complex, and physicallyimpossible, if
1
rρ
∂p
∂r< −f
2
4. (12.32)
(The above limit is identical to what was deduced in the previous section, without recourseto statements about square roots of negative numbers).

12.4. SOLVING THE QUADRATIC EQUATION 129
ω
for
v
rf
1
ρf 2r
∂p
∂r
or
vgfr
orωgf
Figure 12.1: Red parabola: solutions of the gradient wind relation. Slanted blue dashedline: geostrophic balance. For a given 1
ρf2r∂p∂r
, two solutions are possible, dubbed regular andanomalous. Green dots: some specific solutions from the text, regular low r.l., regular highr.h., anomalous high a.h., anomalous low a.l.. The regular solutions are slight modificationsof geostrophic balance, the anomalous solutions are slight modifications of the inertial oscillation(purple dot at ω
f= −1). Note solutions are possible in “lows” for all ∂p
∂r> 0, but in “highs”
only for ∂p∂r> −1
4ρf 2r.

130 CHAPTER 12. THE GRADIENT WIND
~V~a
fvr
−1ρ∂p∂r
r
regular
low
~V~a
fvr
−1ρ∂p∂r
r
regular
high
~V
~afvr
−1ρ∂p∂r
r
anomalous
low
~V
~afvr
−1ρ∂p∂r
r
anomalous
high
Four solutions to the gradient wind relation.
Figure 12.2: The regular low and regular high are obtained by assuming v = ±20 m s−1,f = 10−4 s−1, r = 1000 km, and then solving for 1
ρ∂p∂r
. The anomalous low and anomalous
high are obtained here by retaining the value for 1ρ∂p∂r
and f , and finding the second solutionfor v from the quadratic. The velocity ~v is scaled the same in all four plots. In the anomalouscyclones (on the left), the scale for the Coriolis force vector fvr, pressure gradient force vector−1ρ∂p∂r
r and the acceleration vector ~a have been drawn with 1/6 the scale as that used for the
regular cyclones. (The vectors fvr and ~a are very large in the anomalous cyclones, so consistentscaling is not used).

12.4. SOLVING THE QUADRATIC EQUATION 131
12.4.1 The regular and anomalous solutions
regular low
As stated above, it is certainly more straight-forward to specify v and solve for 1ρ∂p∂r
in (12.3).
For example, v = 20 m s−1, f = 10−4 s−1, r = 1000 km, and
1
ρ
∂p
∂r= fv +
v2
r
= 2× 10−3 m s−2 + 4× 10−4 m s−2
= 2.4× 10−3 m s−2 . (12.33)
Note the dominance of the Coriolis term over the centripetal acceleration.
This dominance is typical of large-scale wind. This is a regular low. Recall vg is the value ofv for which the Coriolis force exactly balances the PGF.
fvg ≡1
ρ
∂p
∂r. (12.34)
In this case, vg = 24 m s−1. The value v = 20 m s−1 is sub-geostrophic (slightly). Also,ω = v/r = 2.0× 10−5 s−1 << f . These are typical properties of regular lows. A real-worldanalysis of a regular-low is shown in Figure 12.3.
anomalous low
Now reverse the above solution. We assume1
ρ
∂p
∂r= 2.4× 10−3 m s−2 (12.35)
and solve for v:
v = −fr2±
√f 2r2
4+r
ρ
∂p
∂r
= −50 m s−1 ±√
2500 m2 s−2 + 2400 m2 s−2
= −50 m s−1 ± 70 m s−1 . (12.36)
So v1 = 20 m s−1 or v2 = −120 m s−1.
Of course, v2 could have been easily anticipated because v1 was already known. The pair ofquadratic solutions obeys v1 + v2 = −rf = −100 m s−1.
To truly understand the so-called “anomalous” solutions, it is beneficial to plug v = −120 m s−1
into (12.3):
1
ρ
∂p
∂r= fv +
v2
r
= −1.2× 10−2 m s−2 + 1.44× 10−2 m s−2
= 2.4× 10−3 m s−2 . (12.37)

132 CHAPTER 12. THE GRADIENT WIND
Note the dominance of the Coriolis term and the centripetal acceleration term, which nearlybalance. Anticyclonic motion around a synoptic-scale low pressure pattern is very nearlyan inertial oscillation. The PGF is not of much consequence, it only slightly modifies theproperties of the inertial oscillation. This solution is known an anomalous low, a perversesolution to the gradient wind relation that isn’t seen in nature.
regular highs
Now assume anticyclonic motion with v = −20 m s−1
1
ρ
∂p
∂r= fv +
v2
r
= −2× 10−3 m s−2 + 4× 10−4 m s−2
= −1.6× 10−3 m s−2 . (12.38)
Note the dominance of the Coriolis term over the centripetal acceleration. This is a regularhigh. Again we note what vg is: in this case vg = −16 m s−1. The value v = −20 m s−1 issuper-geostrophic (slightly). And ω = v/r = −2.0 × 10−5 s−1, so |ω| << f . A real-worldanalysis of a regular-high is shown in Figure 12.4.
anomalous highs
Now reverse the above solution. We assume
1
ρ
∂p
∂r= −1.6× 10−3 m s−2 (12.39)
and solve for v:
v = −fr2±
√f 2r2
4+r
ρ
∂p
∂r
= −50 m s−1 ±√
2500 m2 s−2 − 1600 m2 s−2
= −50 m s−1 ± 30 m s−1 . (12.40)
So v = −20 m s−1 or v = −80 m s−1. (We note again, using v1 + v2 = rf could have savedus the labor of solving the quadratic for the second solution.) We investigate v = −80 m s−1
in (12.3):
1
ρ
∂p
∂r= fv +
v2
r
= −8× 10−3 m s−2 + 6.4× 10−3 m s−2
= −1.6× 10−3 m s−2 . (12.41)
Note the dominance of the Coriolis term and the centripetal acceleration term. This anticy-lonic motion around the high pressure is very nearly an inertial oscillation. Again we dismissthe anomalous solution as being of less significance than the regular solution.

12.5. SUMMARY 133
anomalous lows are not always perverse
For ∂p∂r
obtained from a typical weather chart, the relevant physical solution for∣∣∣ 1rρ∂p∂r
∣∣∣ < f2
4
is:
ω = −f2
+
√f 2
4+
1
rρ
∂p
∂r, (12.42)
which yields a |ω| << |f |. The other solution is close to the inertial oscillation of ω = −f :
ω = −f2−
√f 2
4+
1
rρ
∂p
∂r(12.43)
and the atmospheric manifestation is expected to be rare.
But for a tornado with∣∣∣ 1rρ∂p∂r
∣∣∣ >> f2
4, f is insignificant and ω is close to the cyclostrophic
prediction:
ω = ±
√1
rρ
∂p
∂r. (12.44)
For a certain tornadic pressure pattern, both clockwise (regular) and anticlockwise (anoma-lous) solutions are possible for ω (or v), with magnitudes differing by less that one part ina thousand. Though an anticyclonic tornado is officially classified an “anomalous low”, thedynamics are nearly identical to that for a cyclonic tornado.
12.5 Summary
The horizontal velocity vector of an air parcel will deflect to the right or left depending onthe sum of the Coriolis force and the transverse pressure gradient force. The Coriolis forceis always to the right (NH). If the velocity vector turns left, it must be because the pressuregradient force has dominated. If it turns right, either the leftward pressure gradient force isweaker than the Coriolis force or it could be that it is acting toward the right, in concertwith the Coriolis force. These are the mundane facts.
This is a bit more interesting: high pressure vortices are necessarily anticyclonic, and verybroad. Not all anticyclonic vortices are highs; anticyclonic lows such as tornadoes commonlyexist.
A key determinant of the dominant balance in a curving trajectory is the ratio of the angularfrequency ω along the arc (of a circle fitted to the trajectory) to the Coriolis parameter f .When |ω/f | << 1, the balance is nearly geostrophic. When ω ≈ −f , the balance is nearlyan inertial oscillation. When |ω/f | >> 1, the balance is nearly cyclostrophic.

134 CHAPTER 12. THE GRADIENT WIND
Figure 12.3: 500 mb chart for 12 Z 24 October 2007. Above Norman, OK the wind speedis V = 40 kt = 20.6 m s−1 from the north. The Coriolis force is fV = 2Ω sin(35)V =.00171 m s−2 toward the right of the wind vector, or toward the west. The pressure gradientforce is toward the east, with (approximately) −g dZ
dx= −g ∆Z
∆x= −9.81 m s−2 −60 m
300 km=
.00196 m s−2 The flow is subgeostrophic, and therefore the trajectory will have a radius of cur-vature r given from (12.3) as r = (20.6)2/(.00196− .00171) m = 1700 km. If this flow patternis stationary (steady), we could assume the future trajectory will follow a current streamline,and we might expect an answer of ≈ 1000 km to be more consistent with the observation.But given the errors in measurements and analysis, we do find consistency with gradient windtheory: (a) this cyclonic flow is slighlty sub-geostropic (b) the centripetal accleration providedby the residual force implies a synoptic-scale radius of curvature.

12.5. SUMMARY 135
Figure 12.4: 850 mb chart for 12 Z 10 November 2009. Note the high pressure anticyclone.The 15 kt wind barb at 153 W and 40 N implies a Coriolis force of .000723 m s−2, nearlytoward the west. The spacing of the height contours there implies a pressure gradient force of.000690 m s−2, nearly toward the east. The flow is slightly supergeostrophic, consistent withthe anticyclonic curvature. The centripetal acceleration provided by the difference of the abovetwo forces implies a radius of curvature of 1800 km, roughly consistent with the observations.

13 Angular momentum conservationin a rotating coordinate system
13.1 Angular momentum of the Hadley circulation
Imagine a spacecraft following the Earth, but the spacecraft is not rotating in any way.The nose of the spacecraft is directed at a particular star, as are the wing tips. Suppose thespacecraft is hovering at several Earth radii above the north pole. A monitor on the spacecraftlooking downward observes objects – including those that are stationary relative to the Earth– as rotating about the axis of the Earth. Consider an axisymmetric ring of air surroundingthe Earth along a latitude circle. Being axisymmetric, pressure torques are avoided. Wefurther idealize the situation and assume friction torques are avoided. Angular momentumof this ring will be conserved as it moves north or south, as in idealized axisymmetric Hadleycirculation, rising at the equator and moving to above the subtropics, subsiding, and thenheading back to the equator (Figure 13.1). The zonal velocity component U as seen fromthe spacecraft will satisfy an angular momentum conservation law: UR is conserved, whereR is the distance from the Earth’s rotation axis.
With R = RE cos(φ) where φ is latitude, the conservation law equating UR at two differentlatitude angles φ is:
U2RE cos(φ2) = U1RE cos(φ1) . (13.1)
The relative zonal velocity, the quantity that is experienced by residents of the Earth’ssurface, is U minus the velocity of the Earth’s surface:
u = U − ΩRE cosφ . (13.2)
For a ring of air rising in the Hadley circulation, beginning with φ1 = 0 with u1 = 0,
u2 = ΩRE
[1
cos(φ2)− cos(φ2)
]≈ ΩREφ
22 . (13.3)
For φ2 = 20, u2 = 57.9 m s−1, in rough accord with observations of the subtropical jet-stream in the Hadley circulation shown in Figure 13.2.
136

13.1. ANGULAR MOMENTUM OF THE HADLEY CIRCULATION 137
Figure 13.1: Conceptional model of annual-average, zonal-average atmospheric circulation
Figure 13.2: Seasonal-average, zonal-average zonal wind. Contour interval is 5 m s−1
.

138 CHAPTER 13. ANGULAR MOMENTUM
13.2 Rings of air on the f-plane
We have considered the idealized dynamics of a giant ring of air tangent to latitude circles.Let’s prepare to consider more general rings of air, smaller rings that are expanding orcontracting about an arbitrary point on the Earth’s surface. The rings are assumed to besmall enough to allow for the f -plane approximation in the analysis.
Recall the two forms for the equation of motion for the horizontal wind vector ~V :
d~V
dt= f ~V × k− 1
ρ∇
Hp (13.4)
d~V
dt= f ~V × k− g∇pZ . (13.5)
13.2.1 The energy equation
We can derive an energy equation from (13.5). (The derivation from (13.4) is similar).
~V · d~V
dt= ~V · f ~V × k− ~V · g∇pZ . (13.6)
d
dt
(~V · ~V
2
)=
d
dt
(V 2
2
)= 0− ~V · g∇pZ . (13.7)
We see the Coriolis force can only change the direction of the wind, it cannot change thespeed of the wind.
Flow from high to low (heights or pressure) will increase the speed V .
13.2.2 The neglect of sphericity
Independent of the fact that the Earth is rotating (a fact already accounted for in the Coriolis
term f ~V × k) the directions ı, and k vary with position on the Earth. For example, with
φ latitude, ∂∂φ = −k. With y being distance along a meridian line,
∂
∂y=∂
∂φ
∂φ
∂y= − 1
RE
k . (13.8)
Neglecting such derivatives will induce some errors in our calculations of how directions ofvelocity vectors would be changing on a spherical Earth, as opposed to a planar approxima-tion of a local area. Note the factor of RE in the denominator in (13.8), recall RE = 6370 km.Directional changes in velocity vector (per unit distance travelled) will produce terms pro-portional to 1/R, where R is the radius of the curvature of flow, which is of order 1000 km.Neglecting the terms produced by the sphericity of the Earth does not cause significant error,for the purposes in our investigations.

13.3. THE COMPONENT EQUATIONS ON THE F -PLANE 139
13.3 The component equations on the f-plane
Thus, for many applications, we are justified in making a planar approximation. Writing~V = uı+ v, (13.5) becomes, with the planar approximation,
du
dtı+
dv
dt = −fu+ fvı− g
∂Z
∂xı− g
∂Z
∂y (13.9)
or
du
dt= +fv − g
∂Z
∂xdv
dt= −fu− g
∂Z
∂y. (13.10)
Continuing with the planar approximation, let’s instead write ~V in plane polar coordinates~V = vrr + vθθ.
d
dt
(vrr + vθθ
)= f(vrr + vθθ)× k− g
∂Z
∂rr− g
1
r
∂Z
∂θθ . (13.11)
Do you remember how to do proceed? We saw this in (10.38):
d
dt
(vrr + vθθ
)=
dvrdt
r +dvθdtθ + vr
dr
dt+ vθ
dθ
dt(13.12)
=
(dvrdt− v2
θ
r
)r +
(dvθdt
+vθvrr
)θ . (13.13)
So (13.9) is (dvrdt− v2
θ
r
)r +
(dvθdt
+vθvrr
)θ
= −fvrθ + fvθr− g∂Z
∂rr− g
1
r
∂Z
∂θθ . (13.14)
The radial and azimuthal components are:
dvrdt− v2
θ
r= fvθ − g
∂Z
∂r(13.15)
dvθdt
+vθvrr
= −fvr − g1
r
∂Z
∂θ. (13.16)
Recall from the gradient wind application, if the origin to the polar coordinate system ischosen properly, vr = 0 and the radial component is the equation for gradient wind balance:
− v2θ
r= fvθ − g
∂Z
∂r. (13.17)
(Of course, you have seen this with vθ written as v, in the study of the gradient wind.)“Chosen properly” for application to gradient wind requires (a) either the trajectory be

140 CHAPTER 13. ANGULAR MOMENTUM
completely circular, in which case the origin of the polar coordinate system can be stationaryor (b) the modest aims of the analysis can tolerate a continual shift of the origin as the circleshifts to be tangent to a generally curved trajectory.
Here we keep the origin fixed, and consider spiralling inflow or outflow carrying a ring ofair toward or away from the center of the coordinate system. Unlike gradient wind analysis,vr 6= 0. With vr = dr
dt. The azimuthal component (13.16) can be written
dvθdt
+vθr
dr
dt= −f dr
dt− g
1
r
∂Z
∂θ(13.18)
rdvθdt
+ vθdr
dt+ fr
dr
dt= −g
∂Z
∂θ(13.19)
d
dt
(rvθ +
1
2fr2
)= −g
∂Z
∂θ. (13.20)
Note in going from (13.19) to (13.20) we have neglected the variation of f , which is part ofthe f -plane approximation.
13.4 Angular momentum in the f-plane
When ∂Z∂θ
= 0, we have conservation of angular momentum on the f -plane:
d
dt
(rvθ +
1
2fr2
)= 0 (13.21)
rvθ +1
2fr2 = constant . (13.22)

13.4. ANGULAR MOMENTUM IN THE F -PLANE 141
Figure 13.3: A ring of air,initially at rest, acquires cy-clonic rotation when its ra-dius decreases from r1 to r2.The curved arrows are trajec-tories of individual parcels inthe ring of air.
Let’s apply (13.22), but, as we have done previously, writevθ → v to avoid double subscripts. Consider a ring of air withinitial radius r1 = 400 km and v1 = 0. The ring is at lowlatitudes where f = 0.5 × 10−4 s−1. The ring contracts to aradius of r2 = 50 km. What is the resulting value of v2?
r2v2 +1
2fr2
2 = r1v1 +1
2fr2
1 (13.23)
v2 =1
2fr2
1 − r22
r2
(13.24)
v2 = 78.75 m s−1 . (13.25)
This example application of conservation of angular momentum, in the presences of a Cori-olis force, gives an opportunity to emphasize a number of profound issues in atmosphericdynamics. In the contracting ring, the Coriolis force produces trajectories of parcels thatinitially have anti-cyclonic curvature. However, the trajectories ultimately have cyclonic cur-vature, as part of a regular low in which the pressure gradient force overcomes the Coriolisforce.
Note that conservation of angular momentum requires kinetic energy to increase. We knowfrom Section 13.2.1 that the increase of energy was not caused by the Coriolis force, butrather by the radial pressure gradient force. The movement from high to low pressure, withhigh pressure on the tails and low pressure on the noses of individual parcel during thespin-up, is essential for the increase in the kinetic energy.
Alas, applications to real hurricanes must deal with the fact that angular momentum is notperfectly conserved in rings of air, as in Figure 13.4.

142 CHAPTER 13. ANGULAR MOMENTUM
Figure 13.4: A conceptional model of a hurricane, with cyclonic spin-up in the inflow, andanticyclonic spin-up in the outflow. Note the outflow becomes anticyclonic, and is not simplya weakening cyclonic flow, that is reversing the spin-up in the inflow. There is an implicationthat angular momentum must have been lost. This loss is usually ascribed to friction in theboundary layer.
13.5 Vorticity and Potential vorticity
Using vθ = r dθdt
, and multiplying every term by 2π, (13.22) can be written:
d
dt
(πr2 2
dθ
dt+ f πr2
)= 0 . (13.26)
The rule for the angular momentum of a parcel of air now looks like a rule for the rotationrate of a patch of area A = πr2. If we let ζ ≡ 2dθ
dt, which we will call the relative vorticity,
then (13.26) can be written:d
dt[A(ζ + f)] = 0 . (13.27)
Here is some jargon: Recall the Coriolis parameter f is the component of 2~Ω in the verticaldirection, so f is a measure of twice the rotation rate of the planetary surface, about thevertical axis. No surprise that f in the context the of (13.27) is referred to as planetaryvorticity. Since f is paired with ζ in a conservation law, ζ + f is appropriately calledabsolute vorticity. A(ζ + f) is called potential vorticity (even though it does not have thedimensions of vorticity), and is conserved.

13.5. VORTICITY AND POTENTIAL VORTICITY 143
Happily, the above equation applies to far more situa-tions than just rings or patches of air in an axisymmet-ric pressure field. The PGF does not generate vortic-ity well. In cases where density is constant, the PGFcannot generate any torque about the center of mass;we do not need to invoke ∂p
∂θ= 0 to make a claim of
no torque. To understand this, imagine isobars aresqueezed together on one side of the patch, makingthe PGF greater there. Some calculus will show that aweaker PGF, causing a torque of the opposite sign, oc-curs over a larger portion of the patch. The net torque
is zero. This result still holds in cases where density is not constant, provided that pressureand density contours do not cross, which is always the case on a surface of constant potentialtemperature. On surfaces of constant potential temperature, the PGF generates no vorticityat all.
Furthermore, (13.27) also applies in an accelerating reference frame moving with that patch;the patch does not need to have a fixed center of mass as in our first application to ahurricane. Recall the rules we know about how external torques change angular momentumabout its center of mass, independent of whether the center of mass is accelerating.
Our good fortune continues. The rings and patches of airdon’t need to stay circular in order for (13.27) to stay valid.However we will need to adjust the definition of ζ to accountfor the fact that the rotation rate dθ
dtneeds to be average value
over the distorting patch. Some mathematics will show that,in the limit of small patches, all we need to do is imagine wehave embedded just two crossed streaks of dye, and monitored
the individual rotation rate for a brief instant of time. Twice the average rotation rate (thedefinition of ζ) is just the sum of these two individual rates.
Smile again. Though not included in its derivation, it turnsout that (13.27) also applies in situations where f varies withposition. So provided the air of the patch is conserving poten-tial temperature, the patch can be moving on a sphere, withf changing with latitude, distorting to a non-circular shape— and (13.27) still applies. Let’s sketch a motivation for why(13.27) applies. We consider how ζ will change when A1 = A2:
ζ1 + f1 = ζ2 + f2 . (13.28)
If f increases as a patch moves north, then (13.28) implies ζ decreases. Why should this beso? Consider a square patch, initially with ζ = 0, that moves northward, with uniform v.f is greater on the northern edge than on the southern edge, so the patch is also deformedand (on average) given anti-cyclonic rotation. A negative value of ζ is acquired. Here is themath:
du1
dt= vf1
du2
dt= vf2
d
dt(u2 − u1) = vf2 − vf1 (13.29)

144 CHAPTER 13. ANGULAR MOMENTUM
Assume
f2 = f1 +df
dy∆y (13.30)
So
d
dt(u2 − u1) = v
df
dy∆y
=dy
dt
df
dy∆y
=df
dt∆y
d
dt
(−u2 − u1
∆y+ f
)= 0 . (13.31)
Can you see that −u2−u1∆y
is dθdt
for a vertical segment on the patch? Making that claim,
(13.31) is:d
dt(ζ + f) = 0 , (13.32)
which is consistent with (13.27), for the case dAdt
= 0.
13.6 Isentropic potential vorticity
We are now on the verge of writing down oneof the most powerful quantities in the meteo-rological arsenal. Rather than monitoring thevariation of A, we can use the following propor-tionality:
A ∼ −∂Θ
∂p. (13.33)
A formal derivation of the above is not presented here. The informal argument is that,with potential temperature Θ assumed conserved , as −∂Θ
∂pdecreases (increases), the parcel
by implication has has been stretched (compressed) in the vertical and the area of a cross-sectional patch has decreased (increased). In the figure on the left, you need to imagine thatas the black cylinder stretched into the red one, the potential temperature surfaces movedwith the end caps of the cylinder (better figure needed!).
Using (13.33) in (13.27), a conserved potential vorticity can therefore be defined as:
P ≡ (ζ + f)g
(−∂Θ
∂p
). (13.34)
The potential vorticity unit or PVU is useful:
1 PVU ≡ 10−6s−1 m2 kg−1 K . (13.35)

13.7. ELEMENTARY USES OF POTENTIAL VORTICITY CALCULATIONS 145
Figure 13.5: Potential vorticity plot from: http://www.pa.op.dlr.de/arctic/pvth310_
loop.html
Typical atmospheric values of P are between 0 PVU and 10 PVU, as in the example datashown in 13.5.
Isentropic potential vorticity is one of the most conserved dynamical quantities in the at-mosphere — conserved in the sense that its value does not change in parcels as the parcelsmove in the atmosphere. An experienced forecaster, or atmospheric dynamicist, can you useknowledge of where potential vorticity is now to make significant judgements about whatweather has happened in the past and what will happen in the future.
13.7 Elementary uses of potential vorticity calculations
Consider the data in Figure (13.6). What is the value of ζ in SW OK? We see from thecontours:
ζ + f = 2× 10−4 s−1 . (13.36)
Let’s take the latitude there to be 35N.
f = 2Ω sin(35) = 8.37× 10−5 s−1 . (13.37)
ζ = 1.17× 10−4 s−1 . (13.38)
What is the period of rotation of the patch of air there?
dθ
dt=
1
2ζ = 5.82× 10−5 s−1 . (13.39)

146 CHAPTER 13. ANGULAR MOMENTUM
Figure 13.6: A plot of absolute vorticity ζ + f . The units are 10−5 s−1. For example, themaximum value of absolute vorticity over southwest Oklahoma is 20× 10−5 s−1.
The period is:
τ =2πdθdt
= 30 hr . (13.40)
Equation (13.27) can be applied as:
A1 (ζ1 + f1) = A2 (ζ2 + f2) . (13.41)
There are a variety of things that can be solved for in the above relation. Suppose a patchhad zero relative vorticity, ζ = 0, when it was at a latitude of 60N. The patch then movedto 35N. What would then be the value of ζ? Let subscript “1” denote for 60N, “2” denotefor 35N. Assume A1 = A2. From (13.41):
ζ2 = f1 − f2 = 4.3× 10−5 s−1 . (13.42)
That is less than the observed value in Figure 13.6 of ζ2 = 1.17× 10−4 s−1.
So, if potential vorticity was conserved in the migration from 60N to 35N, what is the ratioof the area of the patch when at 60N , as compared to 35N ?
We seek A1/A2:A1 (ζ1 + f1) = A2 (ζ2 + f2) . (13.43)
A1
A2
=ζ2 + f2
ζ1 + f1
. (13.44)

13.8. A GENERAL DEDUCTION FROMCONSERVATIONOF POTENTIAL VORTICITY147
Since the right-hand side is known (ζ1 = 0, ζ2 = 1.17×10−4 s−1, and so on), we can calculate
A1
A2
= 1.584 . (13.45)
We conclude that stretching of the atmosphere has reduced to the cross-sectional area of thepatch to 1/1.584 of the original area.
13.8 A general deduction from conservation of poten-
tial vorticity
Consider a cylinder of air that is initially at rest, meaning with ζ1 = 0. Suppose the cylinderis stretched or squashed without changing latitude. The resulting relative vorticity ζ2 followsfrom (13.27):
ζ2 = f
(A1
A2
− 1
). (13.46)
If the cylinder is infinitely squashed, or A2 →∞, then ζ2 → −f . If the cylinder is infinitelystretched, or A2 → 0, then ζ2 → ∞. From these considerations, it appears problematic tospin-up intense anti-cyclones, by squashing, but spinning up intense cyclones by stretchingis more opportune. This asymmetry leads to typical features seen in a 500 mb chart as inFigure 13.7.
13.9 Summary
The concept of angular momentum, and the application of the fundamental theorems aboutit from Newtonian mechanics, finds many applications in atmospheric dynamics. In manycircumstances, the pressure gradient forces can exert little or no torque on patches or columnsof air. This fact makes angular momentum, and especially its “kin” potential vorticity, aquantity with a long life time in the atmosphere (a conserved quantity), or at least a quantity
with a simple prognosis, as compared with that for the velocity vector ~V .

148 CHAPTER 13. ANGULAR MOMENTUM
Figure 13.7: 500 mb heights and relative vorticity ζ from: http://www.nrlmry.navy.mil/
metoc/nogaps/NOGAPS_nh_net.html. Note: the positive values of ζ have larger magnitudesthan the negative values of ζ. (Of course, the color scheme may bias that conception somewhat).The positive values tend to be concentrated, and the negative values more dispersed. Theseproperties are consistent with the asymmetry of the spin-up process represented in (13.46).

14 The Thermal Wind
Recall the definition of the geostrophic wind. Let’s use the meridional direction of the windas an example:
vg =gf
(∂Z
∂x
)p
. (14.1)
In meteorology, the thermal wind (which many of us feel is misnamed) is simply the variationof the geostrophic wind vector (or component) with height. A thermal wind relation relatesthis variation to the horizontal temperature gradient, hence the variation of the wind beinglabeled “thermal”.
Here is an example. A thermal wind can be the difference of the meridional component of~V g between two heights:
vT = vg2 − vg1 =gf
∂Z2
∂x− gf
∂Z1
∂x=gf
∂
∂x(Z2 − Z1) . (14.2)
We now proceed to derive a thermal wind relation, focusing on the cause of the variation ofthickness Z2 − Z1. This will show how vT is related to
(∂T∂x
)p.
First we review how to find the pressure difference between two heights:
dp
dz= −ρg (14.3)
z=z2∫z=z1
dp = −z=z2∫z=z1
ρgdz (14.4)
p(z1)− p(z2) =
z=z2∫z=z1
ρgdz . (14.5)
Recall (14.5) is a statement that the net pressure force across the column supports the weightof the column.
Next derive how to find the height difference, or thickness, between the two pressure surfaces.We write the hydrostatic equation “upside-down”:
dz
dp= − 1
ρg. (14.6)
149

150 CHAPTER 14. THE THERMAL WIND
Figure 14.1: The vertical variation of geostrophic wind in a barotropic atmosphere (a) andin a baroclinic atmosphere (b). The blue portion of the surface denotes a cold region whilethe orange portion denotes a warm region. (But (a) should NOT be interpreted as depictingwith warm and cold regions ALOFT). The dotted lines enclose isobaric surfaces which remainat constant slope with increasing height in (a) and increase in slope with height in (b).
Figure 14.2: Thermal wind in the (x, z) plane. Higher temperature on the right is associatedwith a greater thickness between pressure surfaces on the right, and hence a steeper slope ofthe upper pressure surface, and a large geostrophic wind aloft. (The circle with a cross inside
indicates the vector ~V g into the page).

14.1. THERMAL WIND EXAMPLES OVER NORMAN, OKLAHOMA. 151
Or, using meteorology’s Z and g, we write:
dZ
dp= − 1
ρg= −RT
p
1
g. (14.7)
p=p2∫p=p1
dZ = −p=p2∫p=p1
RT
p
1
gdp (14.8)
Z(p2)− Z(p1) = −Rg
p=p2∫p=p1
Tdp
p. (14.9)
Equation (14.9) is a hypsometric equation. (Note we will usually be assuming p2 < p1).
The following definition will be useful:
〈T 〉 ≡
p=p2∫p=p1
T dpp
p=p2∫p=p1
dpp
=
p=p2∫p=p1
T dpp
ln(p2p1
) . (14.10)
Notice 〈T 〉 is a weighted average of T between p1 and p2, with larger contributions where pis smaller. So, in terms of the average temperature 〈T 〉, (14.9) is:
Z(p2)− Z(p1) =R
g〈T 〉 ln
(p1
p2
)(14.11)
Using (14.11) for Z2 − Z1, (14.2) now yields a thermal wind relation:
vT =gf
∂Z2
∂x− gf
∂Z1
∂x(14.12)
=gf
∂
∂x(Z2 − Z1) (14.13)
=gf
∂
∂x
[R
g〈T 〉 ln
(p1
p2
)](14.14)
=R
f
∂〈T 〉∂x
ln
(p1
p2
). (14.15)
By analogy, the thermal wind in the zonal direction is:
uT = −Rf
∂〈T 〉∂y
ln
(p1
p2
). (14.16)
The vector form of (14.16) and (14.15) is:
~V T = uT ı+ vT =R
fln
(p1
p2
)k×∇p〈T 〉 . (14.17)

152 CHAPTER 14. THE THERMAL WIND
Figure 14.3: The wind above Norman is nearly geostrophic. Between 700 mb and 400 mb notethe increase in u with height, and the decrease in temperature toward the north. (For a lengthscale in this picture we can use distance between the northern and southern borders of Colorado,4 of latitude or 444 km). The calculation (estimate) from (14.19) shows the observations tobe consistent with the theory.

14.1. THERMAL WIND EXAMPLES OVER NORMAN, OKLAHOMA. 153
14.1 Thermal wind examples over Norman, Oklahoma.
Consider the conditions above Norman, Oklahoma in Figure 14.3:
∂〈T 〉∂y
= − 4 K
1 Colorado= −1.0× 10−5 K m−1 . (14.18)
From (14.16):
uT =287
8.3× 10−51.0× 10−5 .560 m s−1 = 19.33 m s−1 = 38 kt . (14.19)
In the above calculation, uT is the theoretical difference in ug at 400 mb minus the valueof ug at 700 mb, over Norman. The observed difference was 45 kt, close to our predictionbased on the temperature distribution. Keep in mind that this particular wind differencethat we are considering is just one particular example of a wind difference that can be calleda thermal wind.
In Figure 14.4, shows a case of the wind turning anticlockwise with height (so-called “backingwith height”). We can use (14.17) to solve for the gradient ∇p〈T 〉. The direction of the
observed gradient is consistent with (14.17), being toward the right of ~V T , toward thesoutheast. However, the magnitude of ∇p〈T 〉 predicted by (14.17) seems to be about twicethe observed.
14.2 Thermal wind as a wind shear derivative
Let’s derive a thermal wind relation again, this time in terms of a rate of change of ~V g withheight, rather than a net change:
∂Z
∂p= − 1
ρg= −RT
p
1
g(14.20)
∂
∂x
(∂Z
∂p
)= − ∂
∂x
(RT
pg
)(14.21)
Note ∂∂x
=(∂∂x
)p
. Next change the order of differentiation on the left, and on the right use(∂p∂x
)p
= 0:
∂
∂p
∂Z
∂x= − R
pg
∂T
∂x. (14.22)
But ∂Z∂x
is related to the geostrophic wind:
fvg = g∂Z
∂x, (14.23)
So (14.22) is:∂
∂p
(fvgg
)= − R
pg
∂T
∂x(14.24)

154 CHAPTER 14. THE THERMAL WIND
Figure 14.4: As in Figure 14.3, but a case showing backing of the wind between 850 mb and700 mb. Above Norman, there is a 40 kt toward the south at 850 mb and a 45 kt wind toward theeast at 700 mb. The observed vector wind difference is 60 kt toward the northeast. Assumingthis vector wind difference is a thermal wind, the thermal wind relation (14.17) predicts theaverage temperature between 850 mb and 700 mb should be increasing toward the southeastat 4.6 K km−1. The observed temperature rate looks to be half that.

14.3. VEERING, BACKING AND ADVECTION 155
Figure 14.5: In (a), cold air advection is occurring. The thermal wind makes the geostrophicwind rotate counterclockwise with height, or so-called backing with height. In (b), warmair advection is occurring. The geostrophic wind rotates clockwise with height, or so-calledveering with height.
or∂vg∂p
= − Rfp
∂T
∂x. (14.25)
The vertical variation can be written with respect to z:
∂vg∂z
=∂vg∂p
∂p
∂z= −∂vg
∂pρg =
Rρg
fp
∂T
∂x=
g
fT
∂T
∂x. (14.26)
By analogy,∂ug∂z
= − g
fT
∂T
∂y. (14.27)
A vector thermal wind relation is:
∂
∂z~V g =
g
fTk×∇pT . (14.28)
Or using
k× ∂
∂z~V g = k×
(g
fTk×∇pT
), (14.29)
(14.28) is also
∇pT =fT
g
∂
∂z~V g × k . (14.30)
14.3 Veering, backing and advection
In the absence of either diabatic processes or vertical motion, the temperature tendency ∂T∂t
at a point is determined by the advection term:
∂T
∂t= −~V ·∇pT (14.31)

156 CHAPTER 14. THE THERMAL WIND
If, at a point, ~V ·∇pT > 0 then ~V is directed from cold to hot; cold air advection is occurring
at that point. Likewise, if ~V ·∇pT < 0, then warm air advection is occurring. If we assume
the actual wind is very close to the geostrophic wind ~V g, then ~V g ·∇pT is the relevantcalculation to determine the sign of the temperature advection. Using (14.30) and (3.59),
~V g ·∇pT = ~V g ·(fT
g
∂
∂z~V g × k
)(14.32)
=fT
gk ·(~V g ×
∂
∂z~V g
). (14.33)
Using the right hand rule, we can convince ourselves that k ·(~V g × ∂
∂z~V g
)> 0 for anti-
clockwise turning with height, which is called backing with height, because the wind is turningback against the meteorological compass. Where the wind is nearly geostrophic and backingwith height, cold air advection is occurring. The opposite case is called veering with height,in which case warm air advection is occurring.
So not only does knowledge of ~V above a station indicate how temperature is varying in thehorizontal above the station, if also gives indications of what ∂T
∂twill be in all layers (where
~V has been observed) above the station. In days of yore, forecasters could use a network ofsparse sonde observations, or even cloud movement (if sonde observations were unavailable)to piece together an analysis of the current thermal structure of the atmosphere.
14.4 Contours and vectors
Contours of constant something, with a vector of somethingtangent to the contours, and of greater magnitude when thecontours are closer, has two prominent applications in mete-orology. The contours could be Z and the vectors ~V g. Or
the contours could be T and the vectors could be ~V T . (Also,
rather than ~V T , the vectors could be the shear of the verticalwind ∂ ~V g/∂z).
If applied to the geostrophic wind, higher Z is to the right of the geostrophic wind:
~V g =gf
k×∇pZ . (14.34)
If applied to the thermal wind: higher T is to the right of the vertical shear of the geostrophicwind:
∂
∂z~V g =
g
fTk×∇pT . (14.35)

14.5. SUMMARY 157
14.5 Summary
The fact that much of the extra-tropical atmosphere is both nearly hydrostatic and nearlygeostrophic constrains the vertical shear of the wind to be related to the horizontal variationof temperature. In the northern hemisphere, the warmer air will be to the right of the vectorincrease of wind with height. The turning of the wind vector with height implies a magnitudeand sign of temperature advection: backing implies cooling and veering implies warming.