-
Fluid DynamicsDr. J.R. Lister
Michlmas 1996
These notes are maintained by Paul Metcalfe.Comments and
corrections to [email protected].
-
Revision: 1.9Date: 2004/07/26 07:30:23
The following people have maintained these notes.
date Paul Metcalfe
-
Contents
Introduction v
1 Kinematics 11.1 Continuum Fields . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 11.2 Flow Visualization . . . . . . . . .
. . . . . . . . . . . . . . . . . . 11.3 Material Derivative . . .
. . . . . . . . . . . . . . . . . . . . . . . . 21.4 Conservation
of Mass . . . . . . . . . . . . . . . . . . . . . . . . . . 31.5
Kinematic Boundary Condition . . . . . . . . . . . . . . . . . . .
. . 31.6 Incompressible Fluids . . . . . . . . . . . . . . . . . .
. . . . . . . . 31.7 Streamfunctions . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 3
2 Dynamics 52.1 Surface and volume forces . . . . . . . . . . .
. . . . . . . . . . . . 52.2 Momentum Equation . . . . . . . . . .
. . . . . . . . . . . . . . . . 6
2.2.1 Applications of integral form . . . . . . . . . . . . . .
. . . . 62.3 Bernoullis Theorem . . . . . . . . . . . . . . . . . .
. . . . . . . . 7
2.3.1 Application . . . . . . . . . . . . . . . . . . . . . . .
. . . . 82.4 Vorticity and Circulation . . . . . . . . . . . . . .
. . . . . . . . . . 8
2.4.1 Vorticity Equation . . . . . . . . . . . . . . . . . . . .
. . . 82.4.2 Interpretation of vorticity . . . . . . . . . . . . .
. . . . . . . 92.4.3 Ballerina effect and vortex line stretching .
. . . . . . . . . . 92.4.4 Kelvins Circulation Theorem . . . . . .
. . . . . . . . . . . 92.4.5 Irrotational flow remains so . . . . .
. . . . . . . . . . . . . 10
3 Irrotational Flows 113.1 Velocity potential . . . . . . . . .
. . . . . . . . . . . . . . . . . . . 113.2 Some simple solutions .
. . . . . . . . . . . . . . . . . . . . . . . . 113.3 Applications
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
3.3.1 Uniform flow past a sphere . . . . . . . . . . . . . . . .
. . . 123.3.2 Uniform flow past a cylinder . . . . . . . . . . . .
. . . . . . 13
3.4 Pressure in irrotational flow . . . . . . . . . . . . . . .
. . . . . . . . 143.5 Bubbles . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 15
3.5.1 General theory for spherically symmetric motion . . . . .
. . 153.5.2 Small oscillations of a gas bubble . . . . . . . . . .
. . . . . 153.5.3 Total collapse of a void . . . . . . . . . . . .
. . . . . . . . . 16
3.6 Translating Sphere . . . . . . . . . . . . . . . . . . . . .
. . . . . . 163.6.1 Steady motion . . . . . . . . . . . . . . . . .
. . . . . . . . 163.6.2 Effects of friction . . . . . . . . . . . .
. . . . . . . . . . . . 16
iii
-
iv CONTENTS
3.6.3 Accelerating spheres . . . . . . . . . . . . . . . . . . .
. . . 173.6.4 Kinetic Energy . . . . . . . . . . . . . . . . . . .
. . . . . . 18
3.7 Translating cylinders with circulation . . . . . . . . . . .
. . . . . . 183.7.1 Generation of circulation . . . . . . . . . . .
. . . . . . . . . 19
3.8 More solutions to Laplaces equation . . . . . . . . . . . .
. . . . . . 203.8.1 Image vortices and 2D vortex dynamics . . . . .
. . . . . . . 203.8.2 Flow in corners . . . . . . . . . . . . . . .
. . . . . . . . . . 21
4 Free Surface Flows 234.1 Governing equations . . . . . . . . .
. . . . . . . . . . . . . . . . . 23
4.1.1 Particle paths under a wave . . . . . . . . . . . . . . .
. . . . 244.2 Standing Waves . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 24
4.2.1 Rayleigh-Taylor instability . . . . . . . . . . . . . . .
. . . . 244.3 River Flows . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 24
4.3.1 Steady flow over a bump . . . . . . . . . . . . . . . . .
. . . 254.3.2 Flow out of a lake over a broad weir . . . . . . . .
. . . . . . 264.3.3 Hydraulic jumps . . . . . . . . . . . . . . . .
. . . . . . . . 27
-
Introduction
These notes are based on the course Fluid Dynamics given by Dr.
J.R. Lister inCambridge in the Michlmas Term 1996. These typeset
notes are totally unconnectedwith Dr. Lister.
Other sets of notes are available for different courses. At the
time of typing thesecourses were:
Probability Discrete MathematicsAnalysis Further AnalysisMethods
Quantum MechanicsFluid Dynamics 1 Quadratic MathematicsGeometry
Dynamics of D.E.sFoundations of QM ElectrodynamicsMethods of Math.
Phys Fluid Dynamics 2Waves (etc.) Statistical PhysicsGeneral
Relativity Dynamical SystemsCombinatorics Bifurcations in Nonlinear
Convection
They may be downloaded from
http://www.istari.ucam.org/maths/.
v
-
vi INTRODUCTION
-
Chapter 1
Kinematics
1.1 Continuum FieldsEveryday experience suggests that at a
macroscopic scale, liquids and gases look likesmooth continua with
density (x, t), velocity u(x, t) and pressure p(x, t) fields.
Since fluids are made of molecules this is of course only an
approximate descrip-tion. On large lengthscales we can define these
fields by averaging over a volume Vsmaller than the scale of
interest but large enough to contain many molecules. Theeffect of
this averaging is to exchange an enormous number of ODEs that
describe themotion of each molecule for a few PDEs that describe
the averaged fields.
This continuum approximation is not always appropriate. For
instance the veloc-ity structure about a spacecraft during re-entry
has a lengthscale comparable with themolecular mean free path.
Similarly, blood flow in capillaries must take the red bloodcells
into account.
1.2 Flow VisualizationThere are many experimental techniques for
obtaining a description of the velocity fieldu(x, t). Three simple
visualisation techniques give rise to the ideas of
streamlines,pathlines and streaklines. We will illustrate these
ideas by application to the simpletwo-dimensional example u(x, t) =
(t, y).
Streamlines are curves that are everywhere parallel to the
instantaneous flow. Theyare visualised experimentally by the
short-time exposure of many brightly-lit particles the streamlines
are obtained by joining the resulting short segments in a
manneranalogous to obtaining magnetic fields from iron filings.
Mathematically, a streamline is a curve x(s;x0, t) at a given
fixed time t with svarying along the curve and passing through a
given point x0 that satisfies
xs
= u(x, t) x(0;x0, t) = x0.
For our example we have
x(s;x0, t) = x0 + ts y(s;x0, t) = y0es.
1
-
2 CHAPTER 1. KINEMATICS
This gives the curvex x0t
= logy
y0.
Pathlines are particle paths: paths traversed by particles
moving with the flow. Theyare visualised experimentally by the
long-time exposure of a few brightly-lit particles.
Mathematically, a pathline is a curve x(t;x0, t0) corresponding
to a particle re-leased from x = x0 at t = t0. The differential
equation is
xt
= u(x, t) x(t0;x0, t0) = x0.
Our example gives
x(t;x0, t0) = x0 +t2 t20
2y(t;x0, t0) = y0ett0 .
For a particle released at t0 = 0 this gives a curve
y = y0e2(xx0).
Streaklines give the position at some fixed time of dye released
over a range ofprevious times from a fixed source (e.g. an oil
spill).
Mathematically, a streakline is a curve x(t0;x, t) with t0
varying along the curveand a fixed observation time t. To obtain
it, we still solve
xt
= u(x, t) x(t0;x0, t0) = x0,
but then fix t instead of t0. Suppose we observe our flow at t =
0 we can useour previous solution to get a streakline
y = y0et0 = y0e2(x0x).
Note that for this unsteady flow we get different results from
each method of visu-alisation. The different methods give the same
result if the flow is steady.
1.3 Material DerivativeThis is a rate of change moving with the
fluid. For any quantity F , the rate of changein that quantity seen
by an observer moving with the fluid is the material or
Lagrangianderivative DFDt .
F =F (x+ x, t+ t) F (x, t)
t
= (x )F + tFt
+ smaller terms.
HenceDFDt
= (u )F + Ft.
-
1.4. CONSERVATION OF MASS 3
1.4 Conservation of MassConsider an arbitrary (at least smooth
this is applied maths) volume V , fixed in spacewith bounding
surface A and outward normal n. The mass inside V is
M =V
dV,
and the mass changes due to the flow over the boundary, so
M
t=
A
u ndA.
Application of the divergence theorem givesV
tdV +
V
(u) dV = 0.Since V is arbitrarily small,
t+ (u) = 0,
or rewritten using the material derivative
DDt
+ u = 0.
1.5 Kinematic Boundary ConditionThis is an expression of mass
conservation at a boundary. If the velocity of the bound-ary is uA,
the condition for no mass flux is
(u(x, t) uA(x, t)) nAt = 0,
which gives that u n = uA n. For a fixed surface, uA = 0, so the
surface is astreamline.
1.6 Incompressible FluidsFor this course, we restrict ourselves
to fluids with = const. Mass conservationreduces to u = 0. Such a
velocity field u is said to be solenoidal.
1.7 StreamfunctionsThis gives a representation of the flow
satisfyingu = 0 automatically. For example,in 2D Cartesians, any
velocity field u = (u, v, 0) is solenoidal if there exists (x, y,
t)such that u = y and v = x .
In 2D polars, we want such that ur = 1r and u = r .
In axisymmetric cylindrical polars, we want such that uz = 1rr
and ur =
1r z . is called a Stokes streamfunction.In axisymmetric
spherical polars, we want such that ur = 1r2 sin
and u =1
r sin r .
-
4 CHAPTER 1. KINEMATICS
-
Chapter 2
Dynamics
2.1 Surface and volume forcesTwo types of force are considered
to act on a fluid: those proportional to volume (e.g.gravity) and
those proportional to area (e.g. pressure). This is a
simplification appro-priate to the continuum level description e.g.
surface forces in a gas are the averageresult of many molecules
transferring momentum by collision with other moleculesover the
very short distance of the mean free path.
Volume forcesWe denote the force on a small volume element V by
FV (x, t)V . The volume forceis often conservative, with a
potential energy per unit volume , so that FV = (or potential
energy per unit mass , so that FV = .
The most common case is
FV (x, t)V = gV.
Surface forcesWe denote the force on a small surface element nA
by FA(x, t,n)A, which dependson the orientation n of the surface
element. A full description of surface forces includesthe effects
of friction of layers of water sliding over each other or over
rigid boundaries(viscosity).
Viscous effects are important when the Reynolds number
UL
1,
where U is a typical velocity, L a typical length and is the
dynamic viscosity, whichis a property of the fluid.
In many cases fluids act as nearly frictionless and in this
course we neglect frictionalforces completely. For a treatment of
viscous fluids see the Fluid Dynamics 2 coursein Part IIB.
For inviscid (frictionless) fluids the surface force is simply
perpendicular to thesurface with a magnitude independent of
orientation:
5
-
6 CHAPTER 2. DYNAMICS
FA(x, t)A = p(x, t)nA,where p is the pressure. The minus sign is
so that pressure is positive.
2.2 Momentum EquationConsider an arbitrary (at least smooth this
is applied maths) volume V , fixed in spacewith bounding surface A
and outward normal n. The momentum inside V is
V
udV,
and the momentum changes due to the flow over the boundary,
surface forces andvolume forces, so
ddt
V
udV = A
u(u n) dA+A
pndA+V
FV dV, (2.1)
which is the momentum integral equation. Written in component
form
ddt
V
ui dV = A
uiujnj dA+A
pni dA+V
FVi dV
uiuj is called the momentum flux tensor.V is fixed, so LHS
is
Vuit dV , and using the divergence theorem on the RHS,
then letting V be arbitrarily small, we achieve the Euler
momentum equation
(ut
+ (u )u)
= p+ FV . (2.2)
The associated dynamic boundary condition is that given forces
are applied at theboundary (i.e. p is given).
2.2.1 Applications of integral formUncoiling of hosepipes
Assume a steady uniform flow U through a pipe of constant
cross-section A. Neglectgravity. Now (2.1) becomes
walls+
ends(u(u n) + pn) dA = 0.
-
2.3. BERNOULLIS THEOREM 7
The integral over the walls iswalls
pndA = force on pipe,
since u n = 0 on the walls. The integral over the ends is
(U2 + p)A(2 1)
and so the force on the pipe is F = (U2 + p)A(1 2).
Pressure change at abrupt junction
Apply a momentum balance to the sketched shape. Neglect gravity,
and also neglectthe time derivative, which is zero on average.
The momentum integral equation (2.1) becomes(u(u n) + pn) dA =
0.
The horizontal component gives
u21A1 + p1A1 = u22A2 + p2A2,
and mass conservation gives u1A1 = u2A2. Then we see that
p2 p1 = u21A1A2
(1 A1
A2
)> 0.
2.3 Bernoullis TheoremFor a steady flow (ut = 0) with potential
forces (FV = ),
(u )u = (p+ ),
-
8 CHAPTER 2. DYNAMICS
which can be written
(12u2 u ( u)
)= (p+ ). (2.3)
We define the vorticity = u and then let H = 12u2 + p + . ThenH
= u. Now u H = 0, so H is constant on streamlines. This is
Bernoullistheorem.
Note also that H = 0 and that H is constant on vortex lines.The
constancy of H means that p is low at high speeds.
2.3.1 ApplicationConsider a water jet hitting an inclined
plane.
Neglect gravity, so that on the surface streamline p = pa the
speed is constant. Letthis speed be U .
Now apply the momentum integral equation (2.1) to getA
uu n+ (p pa) ndA = 0.
Now u n = 0 except at the ends. Mass conservation gives
aU = a1U + a2U.
Now balance the momentum parallel to the wall to get
aU2 cos = a2U2 a1U2.
Thusa1 =
1 + cos2
a and a2 =1 cos
2a.
Balancing the momentum perpendicular to the wall we get F = aU2
sin.
2.4 Vorticity and Circulation2.4.1 Vorticity EquationStart with
the Euler momentum equation (2.2) with potential forces
(ut
+ (u )u)
= (p+ )
-
2.4. VORTICITY AND CIRCULATION 9
and take its curl to obtain
t= ( )u (u ) + u u.
Now u = 0 and = 0, so we obtain
t= ( )u (u )
orDDt
= ( )u. (2.4)
2.4.2 Interpretation of vorticityConsider a material line
element (ie a line element moving with the fluid). Then in atime t,
l l + (l )ut, which gives that lt = (l )u. Hence the tensoruixj
determines the local rate of deformation of line elements.
uixj
=12
(uixj
+xjui
)+
12
(uixj
xjui
)= eij +
12jikk.
The local motion due to eij is called the strain. The motion due
to the second term12jikklj =
12 ( l) is rotation with angular velocity 12.
2.4.3 Ballerina effect and vortex line stretchingThe vorticity
equation (2.4) can be interpreted as saying that vorticity changes
just likethe rotation and stretching of material line elements.
This is just the conservation ofangular momentum.
Consider a rotating fluid cylinder, initially with angular
velocity 1, radius a1 andlength l1. Conservation of mass gives
a21l1 = a22l2 and conservation of angular mo-mentum gives a41l11 =
a42l22. These combine to give
12
=l1l2,
which says that vorticity increases as the fluid is stretched.
This explains the bathtubvortex.
2.4.4 Kelvins Circulation TheoremAssume constant and FV = .
Define the circulation C(t) around a closedmaterial curve (t)
by
C(t) =(t)
u(x, t) dl.
ThenC(t)t
=(t)
DuDt
dl+ u ddtdl
-
10 CHAPTER 2. DYNAMICS
since moves with the fluid. But from the momentum equation DuDt
= p+ andddtdl = (dl )u. Hence
C(t)t
=(t)
((12u2 p+
)) dl
= 0 since is closed
So, for an inviscid fluid of constant density with potential
forces, the circulationaround a closed material curve is
constant.
2.4.5 Irrotational flow remains soA flow with = 0 is said to be
irrotational. If = 0 everywhere at t = 0, then thevorticity
equation (2.4) becomes DDt = 0, implying that = 0 for all times t
0.
This isnt quite true, vorticity can leave a stagnation point,
especially at sharp trail-ing edges.
-
Chapter 3
Irrotational Flows
You will want to find a table of vector differential operators
in various co-ordinatesystems. There is one in the back of
Acheson.
3.1 Velocity potentialThe vorticity equation tells us that an
initially irrotational flow remains so for all time.Sinceu = 0 for
all time there exists a velocity potential (x, t) such that u =
.Note both the + sign and that any function f(t) can be added to .
Given u, we canfind from
= xx0
u(x, t) dl.
The result is independent of path since u = 0. Note that can be
multivaluedin 2D if there are holes with
holeu dl 6= 0.
Mass conservation for an incompressible fluid reduces to = 0,
and so if u = we have to solve 2 = 0.1
The kinematic boundary condition uA n = u n is
uA n = n n
.
Thus solving the Euler momentum equation (2.2) reduces to
solving the more fa-miliar Laplaces equation with Neumann boundary
conditions. The flow is only non-zero because of the applied
boundary conditions on n (on bodies, surfaces and atinfinity).
3.2 Some simple solutionsFor simple geometries it is often
possible to write down solutions of 2 = 0 as asum of separable
solutions in suitable co-ordinate systems. See the Methods course
fordetails.
1Hence irrotational flows are sometimes called potential or
harmonic flows.
11
-
12 CHAPTER 3. IRROTATIONAL FLOWS
Cartesians = U x gives u = U. This is uniform flow with velocity
U (e.g. flow in a
straight pipe). = (ekz or cosh kz or sinh kz) (ekx or cos kx or
sin kx) gives a flow
which is periodic in x (e.g. waves).
Spherical polarsThe general axisymmetric solution of 2 = 0 in
spherical polars is
=n0
(Anr
n +Bnrn1)Pn(cos ),
where the Pn are the Legendre polynomials. We will only use the
first few modes.
= m4pir gives u = m4pi rr2 . This is a radial flow. The total
outflow over a sphereof radius R is 4piR2ur = m, which is
independent of R by mass conservation.This is a point source of
strength m. (If m < 0 it is a point sink.)
= Ur cos Uz gives uniform flow again. r2 cos gives dipole
flow.
Plane polarsThe general solution of 2 = 0 in plane polars is
= K +A0 log r +B0 +n1
(Anr
n +Bnrn)en.
We again use only the first few modes.
= m2pi log r gives u = m2pi rr . This is a radial flow, a line
source of strength m.
= 2pi gives u = 2pi r . The circulation about a circle of radius
R is , which isindependent of R by u = 0. This is a line vortex of
circulation .
r1 cos is a 2D dipole. r2 cos x2 y2 is a 2D straining flow.
3.3 Applications3.3.1 Uniform flow past a sphereConsider a hard
sphere of radius a in a fluid having a uniform velocity U at
infinity.
We have to solve the equations
2 = 0 in r > a,
r= 0 at r = a,
and Ur cos as r .
-
3.3. APPLICATIONS 13
We can satisfy the Laplace equation and boundary condition at
infinity with
= U cos (r +
B
r2
).
The boundary condition at r = a yields B = a3
2 . Thus
u =(U cos
(1 a
3
r3
),U sin
(1 +
a3
2r3
), 0)
in spherical polars (r, , ).
3.3.2 Uniform flow past a cylinderConsider a hard cylinder of
radius a in a fluid with a uniform velocity U at infinity andwith a
circulation .
We have to solve
2 = 0 in r > a,
r= 0 at r = a,
and Ur cos as r .
-
14 CHAPTER 3. IRROTATIONAL FLOWS
We further need r=a
u dl = = []r=a
to obtain a unique solution. These conditions give
= U cos (r +
a2
r
)+
2pi.
In plane polars (r, ), we therefore have
u =(U cos
(1 a
2
r2
),U sin
(1 +
a2
r2
)+
2pir
).
3.4 The pressure in irrotational potential flow with po-tential
forces
The momentum and vorticity equations (2.2, 2.4) become
(t
+ (u )u)
= (p+ )
and(u )u =
(12u2)
respectively, and these combine to give
(
t+
12u2 + p+
)= 0,
which integrates to give
t+
12u2 + p+ = f(t) independent of x. (3.1)
Application
We can apply this theory to the free oscillations of a
manometer. We need to calculate
(x, t) = xx0
u dl.
-
3.5. BUBBLES 15
Let s be the arc length from the bottom, with the equilibrium
points at s = l1, l2.From mass conservation the flow is uniform, so
that u = h everywhere. Therefore = hs, and so
t
x
= hs.
At the interfaces the pressure is constant. Using the equation
for potential flow(3.1) we get(l1 + h)h+ 12h2 + pa gh sin = (l2 +
h) + 12h2 + pa + gh sin.This simplifies to give
h =g(sin+ sin)
l1 + l2h,
and so we have SHM (even for large oscillations).
3.5 Bubbles3.5.1 General theory for spherically symmetric
motionThe pressure is p(r, t), and the far-field pressure is p(,
t). We have radial motion,u 1r2 . If the radius of the bubble is
a(t), then a = ur at r = a, which gives thatu = rr2 aa
2 = . So = aa2r and tr= aa2+2a2ar . Putting all this
together
gives
aa2 + 2a2ar
+
2a2a4
r4+ p(r, t) = p(, t).
At r = aaa 3
2a2 = p(, t) p(a, t),
orddt
(12a3a2
)= a2a (p(a, t) p(, t)) .
This can be interpreted as rate of change of kinetic energy
equals rate of working bypressure forces.
Another rewrite gives
p(r, t) p(, t) = (p(a, t) p(, t)) ar+
12a2(a
r a
4
r4
)
3.5.2 Small oscillations of a gas bubbleAssume a(t) = a0 + a(t)
and that a(t) is small, p is constant in time and that thegas in
the bubble has pressure such that pgas = p 3aa0 (**which can be
obtainedfrom PV constant for ideal adiabatic gas**). Neglect
surface tension. Linearising
aa 32a2 = p(, t) p(a, t)
about a = a0 and a = 0 we obtain
a0a = 3paa0
,
which is SHM with =(3pa2o
) 12
.
-
16 CHAPTER 3. IRROTATIONAL FLOWS
3.5.3 Total collapse of a voidBernoulli implies that the
pressure decreases as the speed increases. If this makes
thepressure negative, then the liquid will break to form a void
filled only with vapour. Thishas important consequences for valves
and propellors (cavitation).
Consider a spherical void (ie p(a, t) = 0) at rest with a = a0
and a = 0 at t = 0with a constant background pressure p. Now
ddt
(12a3a2
)= a2a (p(a, t) p(, t)) ,
so12a3a2 =
13p
(a30 a3
).
Integrate this again (numerically!), to get
tcollapse = 0.92(a20p
) 12
.
3.6 Translating sphere & inertial reaction to
accelera-tion
3.6.1 Steady motionUse the inertial frame moving steadily with
the sphere. It was shown in 3.3.1 thatuniform flow past a fixed
sphere has
= U cos (r +
a3
2r2
)and
u =(U cos
(1 a
3
r3
),U sin
(1 +
a3
2r3
), 0,
).
Hence at r = a, |u| = 32U sin . Potential flow means we can
apply
t+
12u2 + p+ independent of x,
with t = 0 (since steady motion) to compare r = a and r =. This
gives
p(a, ) = p +12U2
(1 9
4sin2
).
This pressure distribution is symmetric fore and aft and around
the equator, sono force is exerted on a steadily moving sphere
(**or indeed any 3D body**). Thissurprising result is called
DAlemberts paradox.
3.6.2 ** Effects of friction **DAlemberts paradox can be
understood only by analogy with Newtonian dynamics:in the absence
of friction forces are needed only for acceleration and not for
uniformmotion.
-
3.6. TRANSLATING SPHERE 17
This potential flow result is a good approximation for bubbles
in steady motion,because they have slippery surfaces. It is a bad
approximation for rigid spheres insteady motion. What is observed
in experiments is separation and a wake.
The small amount of friction produces a thin layer of fluid next
to the rigid surfacethat is slowed down from the potential flow.
This thin boundary layer is sensitive to theslowing down of the
surrounding potential flow from the equator to the rear
stagnationpoint, and detaches from the sphere into the body of the
fluid to produce a shear layerof concentrated vorticity (this is
called separation). Separation also occurs behindother bluff bodies
in steady translation but can be suppressed to a certain extent
behindstreamlined/tapered bodies. Boundary layers are covered in
more detail in Part IIB andPart III courses.
We can estimate the drag force as proportional to the projected
area (A) times thepressure difference: applying Bernoulli gives
drag force = 12CDU2A,
where CD is a dimensionless coefficient that must be measured
experimentally (0.4 fora sphere, 1.1 for a disc, 1.0 for a
cylinder).
3.6.3 Accelerating spheresPotential flow is useful for slippery
bubbles, rapid accelerations of small (rigid) parti-cles and small
oscillations.
For the accelerating sphere, it is best to have the fluid at at
rest. Consider asphere of radius a and centre x0(t) and velocity
u(t) = x0(t). The velocity potentialproblem is then
2 = 0 in r a, 0 as r ,
r
t
= u(t) n on r = a.
with solution
= U cos a3
2r2
= u (x x0(t)) a3
2 |x x0(t)|3
To calculate the force, we need
t
r
=u ra3
2r3+ u (terms linear in x0) .
-
18 CHAPTER 3. IRROTATIONAL FLOWS
Now = terms linear in u. These linear terms must be the same as
for steadymotion. Hence the pressure on the sphere is p = p + ur2
+
12U
2(1 94 sin2
).
The force on the sphere is given byr=a
pndA = 2
r=a
(u r) radA
Now by the isotropy of the sphere,r=a
rirj dA = 4pia4
3 ij , so
F = 12u
4pia4
31a= mu
where m = 12fluid4pia3
3 , the added (or effective or virtual) mass.
3.6.4 Kinetic EnergyThe kinetic energy of fluid motion in a
volume V is
T =V
12u2 dV
=
2
V
()2 dV
=
2
V
() 2dV
=
2
S
() dS
=S
2 (n )dS
For the translating sphere we get T = 12mU2.
3.7 Translating cylinders with circulationThe potential for flow
past a uniform cylinder with circulation is
= U cos (r +
a2
r
)+
2pi,
withu =
(U cos
(1 a
2
r2
),U sin
(1 +
a2
r2
)+
2pir
).
On r = a, |u| = 2 sin U + 2pia , thus
p(a, ) = p +12
(U2
( 2pia
2U sin )2)
and so (by doing the integral), F = (0,U) (in Cartesians). This
is a lift forceperpendicular to the velocity. The same lift force
applies to arbitrary aerofoils (at leastto the first
approximation).
-
3.7. TRANSLATING CYLINDERS WITH CIRCULATION 19
3.7.1 ** Generation of circulation **
In order to calculate the lift on an aerofoil we thus need to
know the circulation .Potential flow without circulation would have
very large velocities around the sharptrailing edge.
This is strongly opposed by friction, and the flow avoids these
high velocities byshedding an eddy as the aerofoil starts to move.
This eddy is of such a size as tostreamline the flow on the
aerofoil.
The circulation around C1 + C2 is initially zero and so remains
zero at all times(by Kelvins theorem). Hence the circulation around
the aerofoil (the bound vortex) isequal in magnitude to the
circulation in the shed starting vortex (but opposite in sign).The
strength is chosen to avoid a singularity at the sharp trailing
edge, a conditionwhich gives pilU sin, provided < 14. For >
14 the flow separates andthe aerofoil stalls.2
Since = 0 vortex lines cannot end in the fluid, and in fact the
bound vortexon the wing is connected to the starting vortex by two
vortices shed from the wingtips.These are responsible for the
observed vapour trails.
2See Fluids IIB or Acheson for more details.
-
20 CHAPTER 3. IRROTATIONAL FLOWS
3.8 More solutions to Laplaces equation
3.8.1 Image vortices and 2D vortex dynamicsRecall that a single
line vortex has
=
2pi, with u =
2pir(y, x).
Since the potential flow equations are linear we can superpose
solutions.
This configuration would give
=i
ii2pi
.
This gives us a new method of finding solutions in nice
geometries. For instance,consider a vortex near a plane wall as
shown.
The velocity field is the same as if there was an image vortex
of opposite strengthso that normal velocities cancel. This image
produces a velocity 4pid at the real vortex,and so the vortex
trundles along parallel to the wall as shown.
-
3.8. MORE SOLUTIONS TO LAPLACES EQUATION 21
Application to dispersal of wingtip vortices
We have vortices at (x0(t), y0(t)) and so we need to add images
at (x0(t),y0(t)).Now
x0 =
4pix20
y0(x20 + y20)
and y0 = 4piy20
x0(x20 + y20).
This gives dy0dx0 = y30x30
, or
1x20
+1y20
= C.
3.8.2 Flow in cornersWe use = r sin, which satisifies
= 0 on = pi
2.
Now |u| r1, and so there are infinite velocities as r 0 if <
1. The effectof friction here is to introduce a circulation.
-
22 CHAPTER 3. IRROTATIONAL FLOWS
-
Chapter 4
Free Surface Flows
4.1 Governing equationsThe flow is assumed to start from rest
and is thus irrotational (and remains so). Let thefree surface be
at (x, y, t), || sufficiently small for nice things to happen.
So
2 = 0 z h,
t+
12 ||2 + p+ gz = f(t),
p = pair at z = ,
t+
x
x
z=
+
y
y
z=
=
z
z=
,
z
z=h
= 0.
We will restrict to the 1-D case but even so, to have any hope
of solving this wehave to linearise it.
1. Throw out the nonlinear terms.
2. Evaluate at z = using information at z = 0.
3. Throw out new nonlinear terms.
2 = 0 0 z h,
t
z=0
+ g = f(t),
p = pair at z = ,
t=
z
z=0
,
z
z=h
= 0.
23
-
24 CHAPTER 4. FREE SURFACE FLOWS
We seek separable solutions and obtain (x, z, t) = A cosh k (z +
h) ei(kxt).Using the dynamic boundary condition t
z=0
+ g = f(t), we obtain the disper-sion relation
2 = gk tanh kh.
In deep water, h 1k , so tanh kh 1, giving 2 = kh and c =
gk
1. In shallow
water, tanh kh kh giving = kgh and c = gh.
4.1.1 Particle paths under a waveBy linearising, we get that
x(t) = x0 ia cosh k (z0 + h)sinh kh ei(kx0t)
z(t) = z0 +a sinh k (z0 + h)
sinh khei(kx0t),
which is elliptic motion. x0 and z0 are the mean positions of
the particles in the(x, z) plane.
In the deep water limit we get circular motion and in the
shallow water limit we getmainly horizontal motion.
4.2 Standing WavesConsider waves in a deep rectangular box, 0 x
a, 0 y b and z 0. Look forlinearised waves with displacement (x, y,
t). Try separable solutions to obtain
(x, y, z, t) = A cosmpix
scos
npiy
bekzeit.
The Laplace equation determines k from m and n by
k2 = pi2(m2
a2+n2
b2
),
and the dynamic boundary conditions determine 2 = gk. This is to
be expected, sincea standing wave is the sum of progressive
waves.
4.2.1 Rayleigh-Taylor instabilityTurn the box in the previous
section upside down (or equivalently replace g with g).This makes
imaginary, leading to a e
gkt term, which quickly magnifies any devia-
tions from = 0. The largest growth rate is for large k, but this
is cancelled by surfacetension in the real world.
4.3 River FlowsThese are nonlinear problems, but can be solved
since the shallowness of the river incomparision to its length
means that the flow is nearly unidirectional.
1The wave speed...
-
4.3. RIVER FLOWS 25
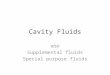
4.3.1 Steady flow over a bump
What happens to the free surface at the bump?We assume that
the river has vertical sides and constant width; it varies only
slowly in the x direction, so that the flow is (to a good
approxima-
tion) horizontal and uniform across any vertical section (since
uz = y = 0); the flow is steady; far from the bump (x ), 0, h h and
U U.
Then mass conservation gives
U( + h) = Uh, (4.1)
whilst applying Bernoullis equation (2.3) to the surface
streamline gives12U2 + patm + g =
12U2 + patm. (4.2)
Now eliminate between (4.1) and (4.2) to obtain12U2 +
gUhU
=12U2 + gh. (4.3)
We can now extract information from (4.3) graphically.
There are thus two roots and three possibilities.
If the bump is too big then the assumption of steady/slowly
varying flow mustfail. This gives a hydraulic jump see 4.3.3.
-
26 CHAPTER 4. FREE SURFACE FLOWS
If the bump is just right then the flow can pass smoothly from
one root the other(e.g. flow over a weir in 4.3.2).
If the bump is not too large then the flow stays on the same
root. This has twosubcases.
On the left hand root: U
gh flow faster than shallow water
waves we have
bump up h RHS u .
i.e. fast shallow flow converts KE to PE to maintain the mass
flux.
Normal rivers are in the slow deep state.
4.3.2 Flow out of a lake over a broad weirThis is the same as
4.3.1 but with a smooth change of branch. We need the bump
justright.
How fast is the outflow as a function of the minimum of h(x)?The
lake is large and deep, so we take the limit h , U 0 with Uh =
Q fixed. Mass conservation gives
U( + h) = Q
and Bernoulli on the surface streamline gives
12U2 + g = 0.
Eliminating as before gives
12U2 +
gQ
U= gh(x), (4.4)
which is a cubic for unknown U(x) given h(x).
-
4.3. RIVER FLOWS 27
The flow starts high on the LH branch in the lake, but comes out
of the weir highon the RH branch. The minimum of h(x) (the crest of
the weir) must be at the join ofthe branches, and so
Q =(
827gh3min
) 12
,
giving the flow rate as a function of the height of the weir.At
the crest of the weir, U =
(23gh
3min) 12 and mass conservation gives
crest = 13hmin
and the fluid depth is 23hmin. Also, U2crest = g(fluid
depth)crest, so that the flow is
travelling at the speed of shallow water waves at the crest.
There can therefore be nocommunication from after the weir back to
the lake.
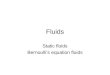
4.3.3 Hydraulic jumps
Given U1 and h1 from river data and h2 from tidal theory can we
predict the speed Vof the jump (and the flow U2)?
The energy loss in the turbulent jump makes Bernoulli
inapplicable (friction is im-portant in the small-scale unsteady
motions). However the flat-bottomed case providesan application of
the momentum integral equation.
Change to a frame moving with the jump. Away from the jump there
is no verticalacceleration and so the pressure is hydrostatic
there.
Taking the horizontal component of
-
28 CHAPTER 4. FREE SURFACE FLOWS
ddt
V
udV = A
(u(u n) + pn) dA+V
FV dV,
and noting that the flow is steady on average we obtain (from
the area integral)
(V + U1)2h1 + (pah1 +12gh21) + pa(h2 h1)
= (V U2)2h2 + (pah2 + 12gh22),
which boils down to
(V + U1)2h1 (V U2)2h2 = 12g(h22 h21).
Mass conservation gives (V + U1)h1 = (V U2)h2, and eliminating V
U2between these equations gives (eventually)
(V + U1)2 =g(h1 + h2)h2
2h1.
We can solve this for V and then solve
(V U2)2 = g(h1 + h2)h12h2for U2.
Note that if h2 > h1 then V U2
gh1 the jump
travels faster than shallow water waves on the river side and
overtakes all informationof its future arrival.
-
References
D.J. Acheson, Elementary Fluid Dynamics, OUP, 1990.This is an
excellent book, easy to read and with everything in. It is also
good for FluidsIIB. Highly recommended.
G.K. Batchelor, An Introduction to Fluid Dynamics, CUP, 1967.The
lecturer recommended this, and it is a reasonably good book for
Fluids IIB. Per-sonally I think youd be wrong in your head to buy
it for this course, but YMMV.
M. van Dyke, An Album of Fluid Motion, The Parabolic Press,
1982.Lots of pictures of flows. An excellent book. Go out and buy
it. Now.
Related coursesIn Part IIA there are courses on Transport
Processes and Theoretical Geophysics. TheIIB fluids courses are
Fluid Dynamics 2 and Waves in Fluid and Solid Media, both ofwhich
use the material in this course to some extent.
29
IntroductionKinematicsContinuum FieldsFlow VisualizationMaterial
DerivativeConservation of MassKinematic Boundary
ConditionIncompressible FluidsStreamfunctions
DynamicsSurface and volume forcesMomentum EquationApplications
of integral form
Bernoulli's TheoremApplication
Vorticity and CirculationVorticity EquationInterpretation of
vorticityBallerina effect and vortex line stretchingKelvin's
Circulation TheoremIrrotational flow remains so
Irrotational FlowsVelocity potentialSome simple
solutionsApplicationsUniform flow past a sphereUniform flow past a
cylinder
Pressure in irrotational flowBubblesGeneral theory for
spherically symmetric motionSmall oscillations of a gas bubbleTotal
collapse of a void
Translating SphereSteady motionEffects of frictionAccelerating
spheresKinetic Energy
Translating cylinders with circulationGeneration of
circulation
More solutions to Laplace's equationImage vortices and 2D vortex
dynamicsFlow in corners
Free Surface FlowsGoverning equationsParticle paths under a
wave
Standing WavesRayleigh-Taylor instability
River FlowsSteady flow over a bumpFlow out of a lake over a
broad weirHydraulic jumps