Embed Size (px)
Citation preview

123
S P R I N G E R B R I E F S I N A P P L I E D S C I E N C E S A N D T E C H N O LO G Y
Christophe BinetruyFrancisco ChinestaRoland Keunings
Flows in Polymers, Reinforced Polymers and Composites A Multi-Scale Approach

SpringerBriefs in Applied Sciencesand Technology

More information about this series at http://www.springer.com/series/8884

Christophe Binetruy • Francisco ChinestaRoland Keunings
Flows in Polymers,Reinforced Polymersand CompositesA Multi-Scale Approach
123

Christophe BinetruyEcole Centrale de NantesNantesFrance
Francisco ChinestaUMR CNRSEcole Centrale de NantesNantesFrance
Roland KeuningsUniversité catholique de LouvainLouvain-la-NeuveBelgium
ISSN 2191-530X ISSN 2191-5318 (electronic)SpringerBriefs in Applied Sciences and TechnologyISBN 978-3-319-16756-5 ISBN 978-3-319-16757-2 (eBook)DOI 10.1007/978-3-319-16757-2
Library of Congress Control Number: 2015934680
Springer Cham Heidelberg New York Dordrecht London© The Author(s) 2015This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or partof the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations,recitation, broadcasting, reproduction on microfilms or in any other physical way, and transmissionor information storage and retrieval, electronic adaptation, computer software, or by similar ordissimilar methodology now known or hereafter developed.The use of general descriptive names, registered names, trademarks, service marks, etc. in thispublication does not imply, even in the absence of a specific statement, that such names are exemptfrom the relevant protective laws and regulations and therefore free for general use.The publisher, the authors and the editors are safe to assume that the advice and information in thisbook are believed to be true and accurate at the date of publication. Neither the publisher nor theauthors or the editors give a warranty, express or implied, with respect to the material containedherein or for any errors or omissions that may have been made.
Printed on acid-free paper
Springer International Publishing AG Switzerland is part of Springer Science+Business Media(www.springer.com)

To Anne-Claire, Ofelia and Françoise

Preface
Over the last decades, an increasing number of functional and structural parts, madeso far with metals, has been progressively reengineered by replacing metallicmaterials by polymers, reinforced polymers, and composites. The motivation forthis substitution may be the weight reduction, the simpler, cheaper or faster formingprocess, or the ability to exploit additional functionalities.
The fillers usually employed cover a broad range involving many scales: (i) thenanometer scale (e.g., carbon nanotubes, graphene, fullerene, nanodiamonds);(ii) the micrometer to the millimeter scale (particles and short fibers); (iii) thecentimeter scale of fibers used in SMC and BMC composite processes; and finally(iv) the macroscopic scale where fibrous reinforcements are made of continuousfibers arranged in bundles.
When load-bearing capacities are especially looked for, continuous fiber rein-forced polymers are selected. In that case, the impregnation of the reinforcementwith a low viscosity polymer involves the flow of a Newtonian or non-Newtonianfluid in the complex multi-scale microstructure related to the fiber and towarrangement. Reinforced polymers are selected instead of high performance poly-mers of equivalent properties since the latter are generally more expensive.
When looking for functional properties, the use of nano-charges opens a widespectrum of possibilities but also raises new challenges, such as dispersion ofcharges into the polymer matrix and occurrence of aggregation and disaggregationmechanisms. Suspensions of practical interest involve many scales and manyconcentration regimes, the latter ranging from dilute to highly concentrated.
In the present monograph, we survey modern developments related to themulti-scale modeling and simulation of polymers (Chap. 1, by Roland Keunings),reinforced polymers that involve a flowing microstructure (Chap. 2, by FranciscoChinesta), and continuous fiber-reinforced composites, wherein the fluid flows insidea nearly stationary multi-scale microstructure (Chap. 3, by Christophe Binetruy).
January 2015 Christophe BinetruyFrancisco ChinestaRoland Keunings
vii

Acknowledgments
The authors acknowledge the support of the ESI and FAURECIA Chairs, EcoleCentrale de Nantes (France), as well as of the Institut Universitaire de France.Moreover, they acknowledge the contribution of several colleagues from EcoleCentrale de Nantes (France), Université catholique de Louvain (Belgium),Université de Bretagne Sud (France), ENSAM Angers (France) and University ofZaragoza (Spain), in particular: Emmanuelle Abisset-Chavanne, Amine Ammar,Gilles Ausias, Sebastien Comas, Elias Cueto, Julien Ferec, Elena Lopez, RabihMezher, and Marta Perez.
ix

Contents
1 Multi-scale Modeling and Simulation of Polymer Flow . . . . . . . . . . 11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Rheology and Structure . . . . . . . . . . . . . . . . . . . . . . . . . 11.1.2 A Hierarchy of Modeling Approaches . . . . . . . . . . . . . . . 21.1.3 The Role of Computational Rheology . . . . . . . . . . . . . . . 4
1.2 Macroscopic Modeling and Simulations . . . . . . . . . . . . . . . . . . . 51.2.1 Governing Equations and Numerical Challenges . . . . . . . . 61.2.2 A Spectrum of Numerical Methods and Applications . . . . . 8
1.3 Multi-scale Kinetic Theory of Viscoelastic Flow . . . . . . . . . . . . . 91.3.1 Probability Distribution of Molecular Configurations . . . . . 91.3.2 Fokker-Planck Equation and Kramers Relation . . . . . . . . . 101.3.3 Exploiting the Multi-scale Model: Three
Basic Approaches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.3.4 Illustrative Examples of Kinetic Theory Models . . . . . . . . 13
1.4 Micro-Macro Simulations Using the Stochastic Approach . . . . . . 171.4.1 CONNFFESSIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.4.2 Numerical Challenges . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4.3 Brownian Configuration Fields . . . . . . . . . . . . . . . . . . . . 201.4.4 Lagrangian Particle Methods. . . . . . . . . . . . . . . . . . . . . . 211.4.5 Variance Reduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5 Micro-Macro Simulations Using the Fokker-Planck Approach . . . 231.5.1 Proper Generalized Decomposition . . . . . . . . . . . . . . . . . 241.5.2 PGD Simulations of the Multi-bead-Spring
FENE Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.5.3 Fokker-Planck Simulations of Complex Flows . . . . . . . . . 27
1.6 The Impact of Closure Approximations . . . . . . . . . . . . . . . . . . . 281.7 Illustrative Examples of Complex Flow Simulations . . . . . . . . . . 31
1.7.1 Early Macroscopic Simulations . . . . . . . . . . . . . . . . . . . . 311.7.2 Macroscopic Simulations with Advanced Models . . . . . . . 331.7.3 Impact of Closure Approximations in Complex Flows . . . . 36
xi

1.8 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361.8.1 From Numbers to Rheology . . . . . . . . . . . . . . . . . . . . . . 371.8.2 The Infamous HWNP and Mesh Convergence . . . . . . . . . 38
1.9 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2 Complex Flows of Micro/Nano Structured Fluids:Reinforced Polymer Composites . . . . . . . . . . . . . . . . . . . . . . . . . . 432.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.2 Dilute and Semi-dilute Suspensions. . . . . . . . . . . . . . . . . . . . . . 46
2.2.1 Multi-scale Description of Non-brownianRod Suspensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.2.2 Multi-scale Description of Brownian RodsSuspensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.2.3 Semi-concentrated Regime . . . . . . . . . . . . . . . . . . . . . . . 582.3 Processing Flow Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
2.3.1 Fixed Mesh Description of the Fluid DomainEvolution and Flow Front Tracking by Usinga Volume of Fluid—VoF—Technique . . . . . . . . . . . . . . . 60
2.3.2 Updated Lagrangian Meshless Simulation. . . . . . . . . . . . . 652.4 Concentrated Suspensions Involving Rod Clusters. . . . . . . . . . . . 69
2.4.1 Rigid Clusters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 692.4.2 Deformable Clusters . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
2.5 Advanced Topics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 802.5.1 On the Solution of the Fokker-Plank Equation . . . . . . . . . 802.5.2 Descriptions Based on Higher-Order Kinematics . . . . . . . . 842.5.3 Accounting for Rod Bending . . . . . . . . . . . . . . . . . . . . . 902.5.4 Delaying Orientation Mechanisms . . . . . . . . . . . . . . . . . . 962.5.5 Collective Effects . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 982.5.6 Orientation Induced by an Electric Field . . . . . . . . . . . . . 101
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
3 Flows of Simple Fluids in Complex Microstructures:Composite Processing of Structural Polymer Composites . . . . . . . . 1093.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1093.2 Description of Fibrous Microstructures in Composites . . . . . . . . . 113
3.2.1 Monodisperse Porosity Medium . . . . . . . . . . . . . . . . . . . 1153.2.2 Bidisperse Porosity Medium . . . . . . . . . . . . . . . . . . . . . . 119
3.3 Governing Equations for Flows in Porous Media . . . . . . . . . . . . 1213.3.1 Pore-Scale Isothermal Flow Description . . . . . . . . . . . . . . 1223.3.2 Macroscopic Scale: Upscaling . . . . . . . . . . . . . . . . . . . . 122
xii Contents

3.4 Flow of Simple Fluids in Non-deformableFibrous Microstructures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.4.1 Negligible Inertia and Single-Scale
Porosity Medium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1283.4.2 Negligible Inertia and Double-Scale
Porosity Medium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1323.4.3 Fluid Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
3.5 Flow of Complex Fluids in Non-deformable FibrousMicrostructures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1353.5.1 Slightly Compressible Fluids . . . . . . . . . . . . . . . . . . . . . 1353.5.2 Reactive Fluids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
3.6 Numerical Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
Contents xiii

Chapter 1Multi-scale Modeling and Simulationof Polymer Flow
Abstract The flow of polymeric fluids in complex geometries relevant toprocessing applications can be simulated numerically using a wide variety of theo-retical models. Simple mathematical models have a purely macroscopic nature andfocus only on the non-linear relationship between shear viscosity and shear rate.More advanced models address the viscoelastic character of polymeric fluids, eitherin a macroscopic or multi-scale framework. These advanced models and the relatednumerical approaches are the subject of this first chapter, wherein we build upon andupdate our previous reviews of the field [29, 31].
1.1 Introduction
1.1.1 Rheology and Structure
Polymer solutions andmelts, like other rheologically-complexfluids, exhibit a varietyof non-Newtonian flow properties [3, 13, 49, 52]. A first departure from Newtonianbehaviour is that the shear viscosity of most polymeric fluids is not a constant mate-rial property (at a given temperature), but rather a non-linear function of the shearrate. This property can have dramatic effects in shear-dominated flows, such as flowsin cylindrical pipes. A wide variety of macroscopic phenomenological constitutiveequations are available that offer a very good fit, with few material parameters, ofthe non-Newtonian shear viscosity of polymeric fluids [3]. In combination with theconservation principles of continuum mechanics (for mass, linear momentum andenergy), these simple constitutive models yield generalized Navier-Stokes equationsthat can be solved numerically with rather obvious extensions of well-known tech-niques for Newtonian fluids [52]. It is much less obvious to take account of the manyother non-Newtonian properties of polymeric liquids related in general to memoryeffects. Indeed, polymeric liquids are viscoelastic materials, meaning that the stressendured by a fluid element depends upon the history of the deformation experienced
© The Author(s) 2015C. Binetruy et al., Flows in Polymers, Reinforced Polymersand Composites, SpringerBriefs in Applied Sciences and Technology,DOI 10.1007/978-3-319-16757-2_1
1

2 1 Multi-scale Modeling and Simulation of Polymer Flow
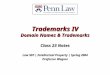
Fig. 1.1 Two-scale view at polymer flow:macroscopic fluid trajectory and velocity field v (left) andmicroscopic molecular configurations (here, of linear entangled polymers) within a fluid element(right)
by that element. Viscoelastic properties include non-linear shear viscosities, but alsothe presence of normal stresses in viscometric flows, high resistance to elongationaldeformation, and various memory effects (such as stress relaxation) related to theelasticity of the material. They are responsible for numerous flow phenomena ofscientific and industrial relevance [5] that need to be predicted, understood, and pos-sibly controlled bymeans of a combination of suitable physicalmodels and numericaltechniques.
The rheological properties of viscoelastic liquids are governedby theflow-inducedevolution of their internal microstructure [18, 19, 34]. In flowing polymers, therelevant microstructure is the conformation of the macromolecules, namely theirorientation and degree of stretch. Each macroscopic fluid element contains a largenumber of polymers with a statistical distribution of conformations. While the flowalters the polymer conformations along the fluid trajectories, the macroscopic stresscarried by each material element is itself governed by the distribution of polymerconformations within that element (Fig. 1.1).
Furthermore, the frozen-in microstructure which develops in processing flowsdictates the physical properties of the final product. One thus faces a challengingnon-linear coupling between flow-induced evolution of molecular configurations,macroscopic rheological response, flow parameters (such as geometry and bound-ary conditions), and final product properties. Theoretical modeling and methods ofcomputational rheology are needed to elucidate this coupling. Clearly, the purelymacroscopic approach of continuum mechanics will not be able to fully address theproblem at hand. Rather, a suitable multi-scale approach is called for.
1.1.2 A Hierarchy of Modeling Approaches
Modern research in computationalmaterials science exploits, sometimes in a coupledfashion, a hierarchy of theoretical models ranging from quantum mechanics to con-tinuum mechanics. The difficulty with polymers is of course the gigantic number ofmicrostructural degrees of freedom and the broad range of time and length scales sep-arating the relevant atomistic and macroscopic processes [41]. A modeling approachbased on quantum mechanics and related ab initio computational techniques must

1.1 Introduction 3
clearly be ruled out at the outset. Indeed, atomistic modeling is probably the mostdetailed level of description that could realistically be applied in rheological studies,by means of techniques of non-equilibrium molecular dynamics (e.g. [51]).
Atomistic flow simulations have been conducted to study the behaviour ofpolymers near walls and geometrical singularities such as re-entrant corners (e.g.[7, 10, 33]). In view of the significant computer resources involved in such calcu-lations, the atomistic approach is currently restricted to very coarse models for thepolymer and to flow geometries of molecular dimensions. While it is doubtful that itmay be feasible soon (and even necessary, for that matter!) to solve flow problems ofmacroscopic size using the atomistic approach, the potential of atomistic simulationsis great, however, in helping us resolve difficult issues such as wall slip. Consider-ation of macroscopic flows found in processing applications calls for less detailedmesoscopic models, such as those of kinetic theory.
The next level of description of a polymeric fluid is that of kinetic theory [4, 14].Here, one ignores atomistic processes altogether and focuses rather on the evolutionof a more or less coarse-grained model of the polymer conformations. For example,a linear polymer chain in a viscous solvent can be described by several models ofdecreasing complexity: the freely jointed, bead-rod Kramers chain made of a numberof beads (of order 100) connected linearly by rigid segments, the bead-spring chainmade of a smaller number of beads (of order 10) connected by entropic springs, orthe single dumbbell, namely two beads connected by a spring. Clearly, these modelsof kinetic theory are not meant to describe the chemical structure of the polymer.They do, however, display in a more or less detailed fashion the important featuresneeded to describe the evolution of polymer conformations in a macroscopic flow.Kinetic theory models for polymer solutions or melts are most naturally exploitednumerically by means of stochastic simulation or Brownian dynamics methods [44],but a powerful alternative method known as the Proper Generalized Decomposition(PGD) has been developed recently [9], as we shall discuss below. Use of a modelof kinetic theory in the numerical simulation of complex flows, in combination withthe macroscopic conservation laws, constitutes the so-called micro-macro approachto computational rheology. This emerging methodology is the main theme of thischapter.
Finally, besides atomistic modeling and kinetic theory lies the macroscopicapproach of continuum mechanics [3, 52]. Here, details of the fluid microstructureare not taken into account, at least explicitly. Rather, the stress experienced by themacroscopic fluid elements is related to the deformation history through a suitableconstitutive equation. Combined with the conservation laws, the constitutive modelyields a set of partial differential (or integro-differential) equations that can be solvedby means of a suitable grid-based numerical method, such as the finite element tech-nique. The vast majority of research publications in computational rheology hasfollowed the macroscopic approach [29, 45, 52]. Very much like atomistic modelingand kinetic theory, continuum mechanics offers a hierarchy of constitutive modelsof diverse predictive ability. It should be stressed that most constitutive equations

4 1 Multi-scale Modeling and Simulation of Polymer Flow
used today in numerical work have been derived from a molecular model of kinetictheory. Such molecular-based constitutive equations yield quantitative informationon the distribution of polymer conformations within a macroscopic fluid elementin the form of averaged quantities such as the second moment of the distributionof conformations. Unfortunately, closure approximations of a purely mathematicalnature are often needed in the derivation of a constitutive model from kinetic theory,and their impact can be significant indeed [28]. In view of the closure problem, thelink with the parent molecular model is thus somewhat polluted, and interpretationof the macroscopic results in molecular terms becomes delicate.
In this context, micro-macro methods [31] that couple the coarse-grained molec-ular scale of kinetic theory to the macroscopic scale of continuum mechanics havean important role to play. In a micro-macro simulation, the conservation equationsare solved together with a model of kinetic theory. This approach is much moredemanding in computer resources than more conventional continuum simulationsthat integrate a constitutive equation to evaluate the viscoelastic contribution to thestress tensor. On the other hand, micro-macro techniques allow the direct use ofkinetic theory models and thus avoid potentially harmful closure approximations.
1.1.3 The Role of Computational Rheology
It is useful to close these introductory remarks with a discussion of the potential roleof computational rheology [29]. The viscoelastic character of a given flow is oftenmeasured by the dimensionless Weissenberg number We, defined as the product ofa characteristic relaxation time of the fluid and a characteristic deformation rate ofthe flow. While We vanishes for Newtonian fluids, it is of order 1 or 10 in the poly-mer flows of interest here. The challenge for computational rheologists is to developnumerical schemes for obtaining accurate numerical solutions to the governing equa-tions at values of We of practical interest, using a physically-realistic mathematicalmodel. Let us consider for a while the (ideal) situation in which reliable computa-tional rheology software would be readily available and usable by non-specialists onstandard computer hardware, and let us imagine some of the numerous opportunities.
For instance, the theoretical rheologist would have a tool at his or her disposal forthe critical evaluation in complex flows of a new theory, whether it be a constitutiveequation, a molecular model, or an improved description of boundary conditions.Complex flows are characterized by transient kinematics in the Lagrangian sense(i.e. following the fluid elements) and by a combination of shear and elongationaldeformations; they indeed constitute a tough testing ground for any theoreticalmodel.The theoretical rheologist could also use tools of computational rheology to bridge thegaps between the several levels of description used to predict the polymer dynamics[41]. One example of such a difficult exercise is the evaluation in complex flows of

1.1 Introduction 5
suitable closure approximations that are invariably needed to derive a macroscopicconstitutive equation from amolecular model. Also, non-Newtonian fluid mechanicsstudies could be performed to understand better the mechanisms responsible forobserved macroscopic flow phenomena (such as vortex growth and purely-elasticinstabilities).
The experimentalist would also benefit. For example, he or she could performuseful computational rheometry work wherein the experiment is actually simu-lated in order to better interpret the data, i.e. to translate better what is measured(such as forces, torques, deformations) into well-defined rheological information.Experimental problems (such asflow inhomogeneities and secondarymotions)wouldthus be identified, possibly eliminated through improved design of the rheometri-cal equipment, or explicitly taken into account in the data reduction phase. Also,the combination of flow experiments and numerical simulations could be used tocharacterize rheological behaviour in complex flows, yielding in a more or less auto-mated way the optimal rheological model and material parameters for the fluid underinvestigation.
Finally, and most importantly in industrial practice, the polymer engineer couldperform elaborate Computer Aided Design studies in which the link between themolecular architecture of the raw material and the final properties of the productwould be established, at least qualitatively. Production problems (such as extru-sion instabilities [32]) would be predicted and partially overcome through improveddesign. One could also think of using an on-line computational rheology model inconcert with appropriate control algorithms to provide for intelligent, physics-basedprocess control techniques.
These are but a few opportunities that a mature field of computational rheologycould generate. Not surprisingly, we remain far from this ideal situation. Neverthe-less, significant collective progress has been made over the last three decades to theextent that the above virtual picture may not be as distant as would appear.
1.2 Macroscopic Modeling and Simulations
Since its pioneering days (Circa 1975), computational rheology has adopted themacroscopic approach. Over the last two decades, computer processing capacity hasreached a level such as to make feasible the complementary micro-macro approach,which involves the coupled solution of the conservation laws and a microscopicmodel of kinetic theory. In this section, we focus on the macroscopic approach.Detailed reviews include [27, 30, 45].

6 1 Multi-scale Modeling and Simulation of Polymer Flow
1.2.1 Governing Equations and Numerical Challenges
Let us consider for the sake of illustration the case of incompressible isothermal flowin a confined geometry, in the absence of body forces. The Cauchy stress tensor σ isthus given by
σ = −pI + τp + ηs γ , (1.1)
where p is the pressure, I is the unit tensor, τp is the polymer contribution to thestress, and ηs γ is a purely viscous component to the stress which involves the rate ofstrain tensor γ = ∇v + ∇vT and a constant viscosity coefficient ηs . Finally, ∇v isthe gradient of the macroscopic velocity field v. The Newtonian stress can be inter-preted physically as the solvent contribution to the stress in polymer solutions, or asthe stress response associated with fast relaxation modes. In other cases, the New-tonian component is added to correct the constitutive model itself (e.g., to eliminateexcessive shear-thinning).
In a complex flow, the velocity field is a priori unknown. The velocity and stressfields are coupled through the conservation laws. Conservation of mass and linearmomentum is expressed as
∇ · v = 0, ρDvDt
= ∇ · σ, (1.2)
whereρ is the fluid density and the operator D/Dt denotes theLagrangian ormaterialderivative ∂/∂t + v · ∇. In macroscopic simulations, the set of governing Eqs. (1.1)and (1.2) is closed with a suitable constitutive equation for the polymer stress.
Over the years, both differential and (separable) single-integral models have beenused in numerical work, ranging from the upper-convected Maxwell (UCM) andLodge models, to more realistic equations such as the FENE-CR, Giesekus, Phan-Thien-Tanner, Doi-Edwards, K-BKZ, and various other models derived from tubetheory [41]. Although they differ greatly in complexity as well as in predictive abil-ity, macroscopic constitutive equations used in computational rheology display a(deceptively) simple generic form. Indeed, differential models read
Dτp
Dt= f(τp,∇v), (1.3)
meaning that the Lagrangian derivative of the polymer stress τp is given as a model-dependent function f of the local polymer stress and velocity gradient evaluatedalong the fluid trajectories. For the particular case of steady-state flow (in the Euleriansense), the left-hand side of (1.3) reduces to the convective term v·∇τ p. In a complexflow, thefluid trajectories alongwhich (1.3) applies are of course unknownaprior, andonemust solve the complete set of Eqs. (1.1)–(1.3). If direct coupling betweenmodes

1.2 Macroscopic Modeling and Simulations 7
is neglected, a spectrum of relaxation times is readily taken into account by definingthe polymer stress as a sum of partial contributions and writing Eq. (1.3) for eachpartial stress.We shall see later that macroscopic constitutive equations derived fromkinetic theory of solutions or melts give the polymer stress as an algebraic function ofa number of microstructural tensors, which themselves follow an evolution equationsimilar to (1.3). In computational work, it has thus become natural to select themicrostructural tensors as primary variables, instead of the polymer stress. The basicnumerical issues remain identical, however.
Separable single-integral constitutive models have been less popular in computa-tional studies [30]. They also have a deceptively simple generic form
τp(t) =∫ t
−∞m(t − t ′)S(t, t ′)dt ′, (1.4)
where m is the memory function of linear viscoelasticity, and S is a model-dependentnon-linear strain measure relative to the present time t . The operator
∫ ·dt ′ is a timeintegral taken along the a priori unknown fluid trajectories parameterized by the pasttime t ′. A spectrum of relaxation times is readily introduced through the memoryfunction.
The generic constitutive equations (1.3) and (1.4) clearly express the mem-ory of polymeric liquids: the polymer stress carried by a fluid element at present(Lagrangian) time t is a function of the deformation history experienced at pasttimes t ′ by the element flowing along its trajectory.
Appropriate boundary conditions supplement the governing equations. One spec-ifies components of either the velocity or the contact force at the boundary ∂Ω of theflow domainΩ; the pressure is specified at one point of the flow domain if no normalcontact forces have been specified anywhere at the boundary. In view of the fluid’smemory, additional boundary conditions must be specified when the flow domain Ω
contains an inlet boundary. Specification of the flow pre-history is often achieved byassuming fully-developed flow upstream of the inlet boundary. For transient flows,initial conditions are also needed for the velocity field.
Although theymay look rather innocuous, the abovemacroscopic governing equa-tions, supplemented with suitable boundary and initial conditions, actually presentformidable mathematical and numerical challenges which certainly were not antici-pated in themid 1970s by the pioneers of the field. Through a combination of numeri-cal experiments and mathematical investigations, our collective understanding of thebasic reasons for these difficulties progressively developed during the 1980s. See[27, 45] for a detailed analysis. In a nutshell, we now know the following: the gov-erning equations are of mixed mathematical type (elliptic-hyperbolic), with possiblelocal changes of type; stress boundary layers develop in many flow fields wherethe corresponding Newtonian fluid mechanical problem is smooth; stress singular-ities (e.g. at re- entrant corners) are much stronger than in the Newtonian case; thenon-linear qualitative behaviour of the exact solutions can be very rich (e.g. mul-tiplicity of solutions, bifurcations). To the present day, these features remain quite

8 1 Multi-scale Modeling and Simulation of Polymer Flow
difficult to handle numerically in an accurate and general way. Whether they reflectthe actual physics of polymeric liquids (in which case we have to live with them!) orresult from inadequate modeling (governing equations and/or boundary conditions)remains essentially an open issue. We shall see later that similar challenges appear inthe context of micro-macro simulations [31]. Despite all these difficulties, the fieldof computational rheology has made definite progress, and it has been gratifyingto observe in most cases that, the more realistic is the rheological model used in asimulation, the easier it is to obtain numerically-accurate solutions (of course, oncea suitable technique has been developed to handle the complexity of the model).
1.2.2 A Spectrum of Numerical Methods and Applications
Standard Computational Fluid Dynamics (CFD) technology offers a wide spectrumof numerical algorithms based on finite element, finite volume, finite difference,boundary integral, spectral methods, and combinations thereof. A similar diversityexists in modern computational rheology, whose fair discussion requires a ratherthick monograph indeed [45]. In what follows, we wish to point to methods andapplications that define in our opinion the current state of the art. The reader willnot find here a personal list of best-buys. Indeed, it has been our experience over theyears that a particular numerical scheme (very much like a particular constitutivemodel) enjoys a range of application where it behaves at its best, and perhaps betterthan other competing techniques, while it may be quite limited or even totally uselessin other situations. Practitioners of computational rheology also know that the onlyway to really evaluate and compare different numerical methods is to implement andtest them all for oneself.
This being said, it is fair to state that most of the published work deals with finiteelement methods for solving 2d steady-state flows (in the Eulerian sense) usinga differential constitutive equation. Extensions of these methods have been madeavailable for the temporal stability analysis of complex flows, and the computationof transient problems. Over the last two decades, finite volume methods have alsobeen actively developed, sometimes in combination with finite elements, to solve2d and 3d time-dependent problems. For an extensive review, see [45]. Recent workrepresentative of the current state of the art include [12, 54].
Methods for integral models have also progressed considerably, most notablywiththe introduction of Lagrangian finite element schemes (wherein the mesh deformswith the fluid) and the Deformation field method (which uses a fixed Eulerian grid).These techniques have opened the way for 2d and 3d transient simulations withintegral models. They are detailed in [30]. For examples of recent work, see [48, 59].
In view of the progress made in numerical technology, macroscopic simulationshave been exploited over the last decade in two important tasks, namely the evaluationof constitutive equations for solutions andmelts in benchmark complexflows, usuallythrough a detailed comparison with experimental observations, and computational

1.2 Macroscopic Modeling and Simulations 9
rheometry, or use of numerical simulation to aid the experimentalist in reducing hisor her data. It is in such studies that computational rheology has already provenuseful, in spite of its relatively young age.
We now turn to the complementary micro-macro approach.
1.3 Multi-scale Kinetic Theory of Viscoelastic Flow
Micro-macro methods of computational rheology [31] couple the coarse-grained,mesoscopic molecular scale of kinetic theory to the macroscopic scale of contin-uum mechanics. They thus offer a two-scale description of the fluid behaviour.In a micro-macro simulation, the conservation equations are solved together with amodel of kinetic theory. As noted previously, this approach is much more demandingin computer resources than more conventional continuum simulations that integratea constitutive equation to evaluate the viscoelastic contribution to the stress ten-sor. On the other hand, micro-macro techniques allow the direct use of kinetic theorymodels and thus avoid potentially dangerous closure approximations. Since the early1990s, the field has developed considerably following the introduction of the CON-NFFESSIT method [35, 43]. Being relatively new, micro-macro techniques have todate been implemented only for models of kinetic theory with few configurationaldegrees of freedom, such as non-linear dumbbell models of dilute polymer solutionsand single-segment tube models of linear entangled polymers. Nevertheless, theirpotential range of applications is very wide indeed. Before describing the numericalimplementation of the micro-macro approach, it is useful to consider the genericmulti-scale formalism on which it is based.
1.3.1 Probability Distribution of Molecular Configurations
For the sake of illustration, let us consider a dilute solution of linear flexible poly-mers in a Newtonian solvent. The configuration of an individual polymer chain isinfluenced by a number of mechanisms, including Brownian, elastic, and drag forces.Indeed, the solvent molecules undergo thermal agitation and continuously bombardthe polymer chain; this results in a diffusion process driven by a stochastic, Brown-ian force. Moreover, an elastic restoring force of entropic nature arises when thechain uncoils. The solvent also exerts viscous drag along the chain which affects thepolymer configuration when different parts of the chain feel a different velocity, i.e.when a velocity gradient is imposed on the fluid.
In the framework of kinetic theory, the molecular configuration of an individualpolymer chain can be defined in a rather coarse fashion by the vector X connecting

10 1 Multi-scale Modeling and Simulation of Polymer Flow
the two chain ends. This simple approach provides a measure of both molecularorientation and stretch. The set of possible values for X is called the configurationspace C , which has here a dimension NC equal to 3.
Within each macroscopic fluid element, located at position x in the flow domainΩ , there is a large collection of polymer chains characterized at time t by a probabilitydistribution (pdf) of configurations ψ(X, x, t). The distribution function ψ is suchthat ψ(X, x, t)dX gives the probability of finding a polymer with configurationbetween X and X + dX at time t and position x.
Under equilibrium conditions, namely when the macroscopic velocity vector fieldv vanishes identically, configurations are distributed according to the equilibriumprobability functionψeq(X) that results, in the present illustrative model, from a bal-ance between Brownian and elastic forces. Furthermore, the polymer or viscoelasticcontribution to the stress τp, reduces to an isotropic tensor of no rheological impor-tance.
Under non-equilibrium conditions, namely when the polymer solution undergoesa macroscopic flowwith velocity field v(x, t), the polymer chains also feel a velocitygradient∇v(x, t), and viscous drag exerted by the solvent affects their configuration.The distribution function is no longer equal to the equilibrium value ψeq(X), and itgenerally varies both in space and time, namely ψ = ψ(X, x, t). Furthermore, theflow-induced distribution of configurations induces a viscoelastic stress field τp(x, t)resulting from anisotropic orientation and stretch of the polymer chains.
Thus, while the kinematics alter the distribution ofmolecular configurations alongthe flow trajectories, the stress experienced by eachmacroscopic fluid element is itselfgoverned by the distribution of configurations within that element. Furthermore,velocity and stress fields are coupled through the conservation principles. Clearly,predicting viscoelastic flowusing amolecularmodel of kinetic theory is a challengingnon-linear problem. We now briefly describe its generic mathematical formulation.
1.3.2 Fokker-Planck Equation and Kramers Relation
Kinetic theory yields two basic building blocks: the diffusion or Fokker-Planck equa-tion that governs the evolution of the distribution function, and the Kramers relationthat links the viscoelastic stress to the distribution function [4, 14, 44].
The Fokker-Planck equation has the general form
Dψ
Dt= − ∂
∂X· {A ψ} + 1
2
∂
∂X∂
∂X: {D ψ}. (1.5)
Here again, the symbol D/Dt denotes the Lagrangian ormaterial derivative ∂/∂t+v·∇, where∇ is the del operator with respect to position x in physical space.Moleculesare thus assumed to be convected by the macroscopic velocity field v. The vectorX defines the coarse-grained configuration and has dimension NC . The factor A is

1.3 Multi-scale Kinetic Theory of Viscoelastic Flow 11
an NC -dimensional vector that defines the drift or deterministic component of themolecular model. The macroscopic velocity gradient ∇v enters in the formulationof A, and is assumed constant over the molecular length scale (first-gradient theory).Finally, D is a symmetric, positive definite NC × NC matrix that embodies thediffusive or stochastic component of the molecular model. In general, both A andD depend upon (X, x, t). Suitable boundary conditions must be specified for ψ , inboth configuration and physical spaces.
It is useful to note that the Fokker-Planck equation is a convection-diffusionequation defined in configuration and physical spaces. It combines in fact a continuityequation expressing conservation of probability,
Dψ
Dt= − ∂
∂X· {J}, (1.6)
and a constitutive equation for the flux of probability J,
J = A ψ − 1
2
∂
∂X· {D ψ}. (1.7)
A particular kinetic theory model is thus defined by a specific constitutive equationfor the flux of probability, via A and D. Examples pertaining to polymer solutionsand melts will be given later.
The second building block of a kinetic theory model is Kramers’ relation, namelyan expression relating stress to molecular configurations. It takes the form of a partic-ular average computed with the distribution function over all possible configurations:
τ p =∫
Cg(X) ψ dX = 〈g(X)〉. (1.8)
Here, g is a model-dependent tensorial function of configuration. Thus, for a givenvelocity field, and starting from a specified initial condition for ψ at time t0, integra-tion of the Fokker-Planck equation (1.5) yields the distribution function at all timet ≥ t0, everywhere in the flow domain Ω . Use of the stress-configuration relation(1.8) then provides the viscoelastic stress field.
In a complex flow, the velocity field is a priori unknown; velocity and stress fieldsare coupled through the conservation laws. For isothermal and incompressible flows,conservation of mass and linear momentum is then expressed as
∇ · v = 0, ρDvDt
= ∇ · {−pI + τp + ηs γ }. (1.9)
Appropriate boundary conditions supplement these conservation equations, as dis-cussed in Sect. 1.2.1.

12 1 Multi-scale Modeling and Simulation of Polymer Flow
1.3.3 Exploiting the Multi-scale Model: Three BasicApproaches
The set of coupled Eqs. (1.5), (1.8) and (1.9), supplemented with suitable initialand boundary conditions in both physical and configuration spaces, is the genericmulti-scale formulation of viscoelastic flow that we consider in the present chapter.To date, three basic approaches have been adopted for exploiting this model:
The continuum approach, wherein a constitutive equation of continuum mechanicsthat relates the viscoelastic stress to the deformation history is derived from, andreplaces altogether, the kinetic theory model (1.5) and (1.8). The derivation processusually involves closure approximations. The resulting constitutive model takes theform of a differential, integral, or integro-differential equation. It yields molecularinformation in terms of averaged quantities, such as the second moment 〈XX〉 of thedistribution;
The Fokker-Planck approach, wherein one solves the generic problem (1.5), (1.8)and (1.9) as such, in both configuration and physical spaces. The distribution func-tion is thus computed explicitly as a solution of the Fokker-Planck equation. Theviscoelastic stress is merely a by-product obtained from (1.8);
The stochastic approach, which draws on the mathematical equivalence betweenthe Fokker-Planck equation (1.5) and the following Itô stochastic differential equa-tion [44]:
dX = A dt + B · dW, (1.10)
where D = B · BT and W is a Wiener stochastic process of dimension NC . In acomplex flow, the stochastic differential equation (1.10) applies along individualflow trajectories; the time derivative is thus a material derivative. Instead of solvingthe deterministic Fokker-Planck equation (1.5), one solves the associated stochasticdifferential equation (1.10) for a large ensemble of realizations of the stochasticprocess X by means of a suitable numerical technique [44]. The distribution functionis not computed explicitly, and the viscoelastic stress (1.8) is readily obtained as anensemble average.
The continuum approach outlined above has been adopted throughout the devel-opment of computational rheology, as discussed briefly in Sect. 1.2. In particular,the first successful finite element simulations of die swell and laminar jet breakup inviscoelastic liquids were obtained in the early 1980s with the Oldroyd-B constitutiveequation [11, 26]. The latter is mathematically equivalent to the simplest kinetictheory model of a dilute solution of flexible linear polymers in a Newtonian sol-vent, known as the Hookean dumbbell model [4]. Three decades later, macroscopicnumerical techniques based upon the continuum approach remain under active devel-opment.

1.3 Multi-scale Kinetic Theory of Viscoelastic Flow 13
In the sequel, we focus on the micro-macro methods needed to implement theFokker-Planck and stochastic approaches.Before describingmicro-macro techniquesin some detail, we consider briefly the FENE dumbbell and Doi-Edwards models.These two models are no longer representative of the state of the art in kinetic theory.They do however display enough complexity for our purpose.
1.3.4 Illustrative Examples of Kinetic Theory Models
1.3.4.1 The FENE Dumbbell Model
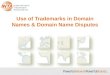
The simplest non-linear kinetic theorymodel of a dilute polymer solution is known asthe Finitely Extensible Non-linear Elastic (FENE) dumbbell model [4]. The polymersolution is viewed as a flowing suspension of dumbbells that do not interact with eachother and are convected by the Newtonian solvent. Each dumbbell consists of twoidentical Brownian beads connected by an entropic spring. Here, the configurationX is the three-dimensional vector Q connecting the two beads (Fig. 1.2).
A FENE dumbbell cannot extend beyond the polymer contour length Q0. Thus,the configuration space C is the set of three-dimensional vectors of magnitude lessthan Q0. The Fokker-Planck equation (1.5) for the distribution function ψ(Q, x, t)reads
Dψ
Dt= − ∂
∂Q·[{
κ · Q − 2
ζFc(Q)
}ψ
]+ 2kT
ζ
∂
∂Q· ∂
∂Qψ, (1.11)
where κ = ∇vT is the transpose of the velocity gradient, ζ is a friction coefficient,Fc(Q) is the entropic connector force, T is the absolute temperature, and k is theBoltzmann constant. The distribution function vanishes at the boundary of the con-figuration space C , namely for all Q of magnitude Q0. We consider entropic springsthat follow Warner’s force law [4],
Fc(Q) = H
1 − Q2/Q20
Q, (1.12)
Fig. 1.2 Left dumbbell model (red) of a linear polymer (blue). Right non-interacting dumbbellswithin a macroscopic fluid element

14 1 Multi-scale Modeling and Simulation of Polymer Flow
where H is a spring constant. The stress-configuration relation (1.8) gives
τp = n 〈QFc(Q)〉, (1.13)
where n is the dumbbell number density and the angular brackets 〈 · 〉 denotethe configuration space average
∫C · ψ dQ. Finally, the Itô stochastic differential
equation (1.10) that is equivalent to (1.11) reads
dQ = [κ · Q − 2
ζFc(Q)] dt +
√4kT
ζdW, (1.14)
where W is the three-dimensional Wiener process, namely a Gaussian stochasticprocess with vanishing mean and covariance 〈W(t1) W(t2)〉 = min(t1, t2) I.
The limit of infinitely extensible dumbbells (Q0 → +∞) is the Hookean dumb-bell model, which is equivalent to the Oldroyd-B constitutive equation. The FENEdumbbell model does not, however, have a mathematically equivalent, closed-formconstitutive equation. A closure approximation is thus needed to exploit the modelin continuum simulations. The simplest closure, due to Peterlin, replaces the FENEspring force (1.12) by the pre-averaged FENE-P approximation
Fc(Q) ≈ H
1 − 〈Q2〉/Q20
Q. (1.15)
It is then possible to obtain from (1.11) and (1.13) the FENE-P constitutive equation,namely a differential equation for the configuration tensor A = 〈QQ〉:
DADt
− κ · A − A · κT = 4kT
ζI − 4H/ζ
1 − tr(A)/Q20
A, (1.16)
supplemented by an algebraic expression relating stress to average configuration,
τp = nH
1 − tr(A) /Q20
A. (1.17)
Note that the FENE-P constitutive equation is of the form,
DADt
= f(A,∇v), (1.18)
which is precisely the generic formulation of differential constitutive models givenin Sect. 1.2.1. The Peterlin approximation can be very poor indeed [28, 50], andmuch better closure approximations are available [36, 37]. At any rate, closure-approximated dumbbell models (such as FENE-P) are very useful in the develop-ment and evaluation of micro-macro methods, since the micro-macro results can becompared to those obtained with the continuum approach.

1.3 Multi-scale Kinetic Theory of Viscoelastic Flow 15
1.3.4.2 The Doi-Edwards Model with Independent Alignment
The simplest tube model of entangled linear polymers is the classical Doi-Edwardsmodel with independent alignment. Reptation is the single relaxation mechanismdescribed by the model, and the dynamics of individual tube segments are decou-pled. Constraint release (thermal or convective), tube stretch, and contour lengthfluctuations are ignored [14]. The configuration X is defined by the unit orientationvectoru of a tube segment and the normalized contour label s ∈ [0, 1] of the primitivechain, where s = 0 and 1 correspond to the chain ends (Fig. 1.3).
The distribution function ψ(u, s, x, t) is such that ψ(u, s, x, t)duds is the jointprobability that at time t and position x a tube segment has an orientation in theinterval [u, u+du] and contains the chain segment labelled in the interval [s, s+ds].Thus, the configuration space C is B(0, 1) × [0, 1], where B(0, 1) is the surface ofthe unit sphere centered at the origin. The Fokker-Planck equation (1.5) for theDoi-Edwards model reads
Dψ
Dt= − ∂
∂u· [(I − uu) · κ · u ψ] + 1
π2τd
∂2ψ
∂s2, (1.19)
where τd is the disengagement time, namely the characteristic time for a chain toescape from its tube by reptation. The boundary conditions in configuration spacespecify that ψ is isotropic at s = 0 and 1, namely
ψ(u, 0, x, t) = ψ(u, 1, x, t) = 1
4πδ(|u| − 1), (1.20)
Fig. 1.3 a Test chain withinentangled linear polymers.b Test chain (red) withinvirtual tube formed byentangled chains (green).c Axis of the tube orprimitive chain (red),parameterized by s and withlocal orientation u. Whentube stretch is ignored, thetube length L is constant andnormalized to 1

16 1 Multi-scale Modeling and Simulation of Polymer Flow
where δ is the Dirac delta function. The Kramers relation (1.8) reads
τp = G 〈uu〉, (1.21)
where G is an elastic modulus, and the angular brackets 〈 · 〉 denote the configurationspace average
∫ 10
∫B(0,1) · ψ duds. Finally, the Itô stochastic differential equation
(1.10) that is equivalent to (1.19) is given by
du = (I − uu) · κ · u dt, ds =√
2
π2τddW, (1.22)
where W is the one-dimensional Wiener process. The evolution equation for u isdeterministic; it expresses the assumption that tube segments orient with the macro-scopic flow. The equation for s is that of a purely-diffusive process. The couplingbetween u and s arises through the boundary conditions (1.20): when the processs reaches either 0 or 1, it is reflected and u is reset to a randomly oriented unitvector [44].
In view of its (relative) simplicity, the basic Doi-Edwards model can be cast intoan equivalent integral constitutive model. Consider a fluid particle whose positionat present time t is given by x; its position at some past time t ′ is x′. The particlemotion is described by the displacement function x′ = x′(x, t, t ′), while the defor-mation gradient F(t, t ′) is defined as ∂x′/∂x. The Doi-Edwards model is formulatedin a Lagrangian framework and has the generic form of separable single-integralconstitutive equations given in Sect. 1.2.1. It thus gives the viscoelastic stress τ p ata moving fluid particle, according to
τp(t) = G∫ t
−∞m(t, t ′)Q(t, t ′) dt ′, (1.23)
where the integral is computed along the past trajectory of the fluid particle, para-meterized by the past time t ′. Here, m is a memory function given by
m(t, t ′) = 8
π2τd
∞∑k=0
exp
(− (2k + 1)2(t − t ′)
τd
), (1.24)
and Q is a strain measure defined as
Q(t, t ′) = 〈uu〉t ′ =⟨(F(t, t ′) · u(t ′))(F(t, t ′) · u(t ′))
|F(t, t ′) · u(t ′)|2⟩
t ′, (1.25)
where 〈 · 〉t ′ denotes the average computed with the isotropic distribution (1.20).Thus, simulations based on the basic Doi-Edwards tube model can be performedeither with a micro-macro numerical method, or with a continuum technique forintegral constitutive equations such as the method of deformation fields [46]. Again,

1.3 Multi-scale Kinetic Theory of Viscoelastic Flow 17
this is very useful for the validation of numerical developments. More sophisticatedtube models that take account of additional physics such as stretch and constraintrelease generally do not have an equivalent closed-form constitutive equation.
We now turn to available numerical techniques for exploiting the generic multi-scale formulation of visoelastic flows. We start with the stochastic approach.
1.4 Micro-Macro Simulations Using the StochasticApproach
1.4.1 CONNFFESSIT
The CONNFFESSIT method [35, 43] is the first implementation of the stochas-tic approach defined in Sect. 1.3.3. The acronym stands for “Calculation Of Non-Newtonian Flow: Finite Elements and Stochastic SImulation Technique”. Althoughit can deal with Eulerian steady flows, CONNFFESSIT is most naturally exploitedas a time-marching scheme. A steady-state flow, if it exists, is then obtained as thelong-time limit of the calculations. At the start of a simulation, a large number ofmodelmolecules (such as dumbbells, bead-spring chains, or any other coarse-grainedmodel) is distributed uniformly over the entire flow domain. Their initial configu-ration is drawn from the equilibrium distribution. As the simulation proceeds, themolecules are convected along flow trajectories. At each time step, solution of theconservation laws (1.9) is decoupled from the integration of the stochastic differen-tial equation (1.10) for each molecule. More precisely, a typical time step is definedby the following algorithm:
S1 Solve the conservation equation (1.9) by means of a standard finite elementmethod to obtain updated values for the velocity and pressure fields, treating thecurrent approximation to the viscoelastic stress field as a known body force termin the momentum equation;
S2 Using the updated velocity field, compute the path of each model moleculeconvected by the macroscopic flow;
S3 For each molecule, integrate the stochastic differential equation (1.10) along themolecule’s path to update its configuration;
S4 Update the viscoelastic stress field by means of the average (1.8) computed overthe local ensemble of molecules currently located within each finite element.
A global ensemble of Ng molecules (e.g. FENE-P and FENE dumbbells) is distrib-uted over the elements of themesh. Consider a typical time step tn → tn+1 = tn +Δt .S1 is performed using a classical penalty finite element technique, with bi-linearquadrilateral elements for the velocity. Each quadrilateral element is split into twotriangles over which the viscoelastic stress has a constant value assigned to the cen-tral Gauss integration point. The time-stepping scheme is implicit in the velocityand explicit in the viscoelastic stress. The body force term ∇ · τp in the momen-

18 1 Multi-scale Modeling and Simulation of Polymer Flow
tum equation is evaluated with stress values known at time tn . Thus, S1 yields theapproximated velocity field va at tn+1. S2 is the classical problem of particle trackingin a given finite element velocity field. The updated location r j
n+1 of the centre ofmass of the j th molecule ( j = 1, 2, ..., Ng) at time tn+1 is obtained by integrating
dr j
dt= va(r j , t), (1.26)
using the explicit, first-order Euler scheme and the initial condition r jn known from
the previous time step. The simplest numerical technique for implementing S3 is theEuler-Maruyama scheme,
X jn+1 = X j
n + A(X jn, tn)Δt + B(X j
n, tn) · ΔW jn . (1.27)
Here, X ji denotes the configuration of the j th molecule at time ti , and the random
vector ΔW jn has independent Gaussian components with zero mean and variance
Δt . Note that each model molecule feels its own Brownian random force, namelyΔW j1
n and ΔW j2n are uncorrelated for j1 �= j2. The Euler-Maruyama scheme is of
weak order 1. When used with FENE dumbbells, it can lead to difficulties if Δt istoo large. Indeed, the length of an individual dumbbell can become larger than theupper bound Q0, which is unphysical. Use of the predictor-corrector scheme of weakorder 2 solves this problem [44]. Finally, S4 amounts to approximating the stress-configuration relation (1.8) by means of a local ensemble average computed in eachelement (or possibly sub-element) of the mesh. The updated viscoelastic stress inelement k is thus given by
τ kp,n+1 = 1
N kloc
∑l
g(Xln+1). (1.28)
Here, the counter l runs over the indices of the N kloc molecules that are currently
present in the kth element. The time step tn → tn+1 is thus completed.Applications of the CONNFFESSIT approach to dumbbell models of dilute poly-
mer solutions, tube models of entangled polymers, colloidal dispersions, and liq-uid crystalline polymers, have been reported for steady-state and transient two-dimensional flows and are reviewed in [31].
1.4.2 Numerical Challenges
TheoriginalCONNFFESSIT schemehas had a significant impact on thedevelopmentof micro-macro techniques. It does however present three basic difficulties. First,tracking the motion of the molecules with a simple explicit scheme can be inaccuratein complex flow geometries, especially in the vicinity of impervious walls where

1.4 Micro-Macro Simulations Using the Stochastic Approach 19
numerical errors can result in molecules leaving the flow domain. Tracking all Ng
individual molecules is also very expensive. At every time step, one must knowthe index of the finite element in which each molecule is currently located. Giventhe large number of molecules and elements, typically Ng = O(105 − 107) andNelt = O(103 − 104) in two-dimensional simulations, one cannot use a brute forcesearch of complexity O(Nelt × Ng) at each time step, and more elaborate methodsare needed such as use of element neighbour lists ordered on the basis of the localdirection of flow. The second difficulty is related to the statistical accuracy of theviscoelastic stress. For a given velocity field, the ensemble average (1.28) carries
a statistical error√
Θ/N kloc, where Θ = V ar [g(X)] is the variance of g(X). Thus,
each element of the mesh must, during the entire simulation, contain enough modelmolecules for the local ensemble average (1.28) to be accurate. Ideally, one shouldhave N k
loc = O(102−103)molecules in each element and at all times. This is not easy(andmaybe even impossible) to ensure, especially in flow regions where large spatialgradients develop in the velocity and stress fields, and where one would preciselywish to use very small elements. A means of reducing the statistical error withoutincreasing the size N k
loc of the ensemble is to apply variance reduction methods.The third difficulty is that CONNFFESSIT stress fields typically show spuriousspatial oscillations which affect, via themomentum equation, the numerical accuracyof the velocity field [31]. These basic issues motivated the development of improvedtechniques which we review next.
A breakthrough came with the method of Brownian configuration fields, that usescorrelated local ensembles [22]. In this approach, the same local ensemble of modelmolecules is defined initially within each material element. As time evolves, theconfigurations of the kth molecule in all local ensembles is determined using thesame sequence of random numbers, i.e. the sequence only depends on the index k.Thus, strong spatial correlations develop in the stress fluctuations within neighbour-ing material elements (which feel a very similar flow history), and evaluation of thedivergence of the stress in the momentum equation leads to partial cancellation of thefluctuations. The method of Brownian configuration fields is an Eulerian implemen-tation of correlated local ensembles. Alternatively, the so-called Lagrangian particlemethods [17, 21, 55] provide a Lagrangian implementation of the same idea. In com-parison with CONNFFESSIT, these techniques produce stress and velocity fieldsthat are significantly smoother in space. Moreover, the cost of generating sequencesof random numbers is reduced drastically. Of course, the use of correlated localensembles introduces artificial spatial correlations. It is thus forbidden altogether inproblems dominated by physical fluctuations (such as flows on a molecular lengthscale).

20 1 Multi-scale Modeling and Simulation of Polymer Flow
1.4.3 Brownian Configuration Fields
The method of Brownian configuration fields [22, 39] uses correlated ensembles ofmodel molecules and completely avoids the tracking problem. Instead of computingthe configuration of discrete molecules along flow trajectories, this method deter-mines the evolution of a finite number of Eulerian configurations fields. Each fieldfeels a random Wiener process that is uniform in space.
Let {Xk(x, t)}N fk=1 denote an ensemble of N f configuration fields defined over the
entire flow domain Ω . In a typical simulation, N f is of order 103. The field Xk(x, t)represents the configuration of the kth model molecule in the local ensemble atposition x and time t . At time t = 0, Xk is set to a spatially uniform value X0
k , drawnfrom the equilibrium distribution for example; all kth molecules thus have the sameinitial configuration. The subsequent evolution of the field Xk is governed by
dXk(x, t) = {−v(x, t) · ∇Xk(x, t) + A(Xk(x, t))} dt + B(Xk(x, t)) · dWk(t).(1.29)
This is indeed the Eulerian formulation of the stochastic differential equation (1.10),with a familiar convection term v · ∇Xk . Note however that the stochastic factordWk only depends on time. As a result, the spatial gradient of the configurationfield is a well defined function of the spatial coordinates. One can thus discretize thefield Xk by means of a standard finite element approximation. Also, in the numericalintegration of (1.29), the same sequence of random numbers is used to determine,everywhere in the flow domain, the configuration of the kth model molecule in thelocal ensemble.
At any time t , an ensemble average computed over all configuration fields yieldsthe approximated viscoelastic stress,
τ ap (x, t) = 1
N f
N f∑k=1
g(Xk(x, t)). (1.30)
Note that the CONNFFESSIT local ensembles (1.28) have a size Nloc that variesboth with time and position in the finite element mesh. In contrast, the ensembleaverage (1.30) involves a number N f of realizations that is fixed and independent ofmesh refinement. This provides a much more effective control of the statistical error.In their early implementation for Hookean dumbbells [22], the authors solve the N f
evolution Eq. (1.29) for the configuration fields bymeans of a discontinuousGalerkin(DG) finite element method, with explicit Euler-Maruyama time stepping. In theDG approach, the interpolation functions are discontinuous across neighbouringelements, which induces only weak coupling between elements. Thus, at each timestep, all configuration and stress calculations can be performed at the element level.Spatial discretization of the conservation laws is achieved by means of the DiscreteElastic-Viscous Split Stress (DEVSS) formulation.

1.4 Micro-Macro Simulations Using the Stochastic Approach 21
In [53], the method of configuration fields has been applied to to the basic Doi-
Edwards model described in Sect. 1.3.4.2. Let us define a set {uk(x, t), sk(t)}N fk=1 of
N f configuration fields uk and associated random walkers sk . In view of (1.22), thefield uk evolves according to
∂
∂tuk(x, t) + v(x, t) · ∇uk(x, t) = [I − uk(x, t)uk(x, t)] · κ(x, t) · uk(x, t), (1.31)
while the random walker sk performs Brownian motion,
dsk =√
2
π2τddWk(t), (1.32)
with a reflecting boundary condition when it reaches 0 or 1. Note that sk is not a func-tion of position x. Whenever sk is reflected, the associated field uk is instantaneouslyreset to a spatially uniform, random field drawn from the isotropic distribution on thesurface of the unit sphere; its subsequent evolution is again governed by (1.31) untilthe next reflection of sk . Here again, the method of configuration fields producesmuch smoother results than CONNFFESSIT. Indeed, in a typical CONNFFESSITsimulation of the Doi-Edwards model, individual tube segments are convected by theflow and have their own associated random walkers. Thus, not only are the tube seg-mental orientations reset at uncorrelated times (when the associated random walkeris reflected), they are also reset to uncorrelated random values. This induces severespatial oscillations in the numerical results for velocity and stress.
1.4.4 Lagrangian Particle Methods
The Lagrangian particlemethod (LPM) introduced in [21] is another further develop-ment of CONNFFESSIT. Here again, the conservation laws are solved at each timestep by means of a standard finite element technique, with the viscoelastic stressknown from the previous step. In LPM, the stress is computed at a number Npart ofLagrangian particles that are convected by the flow. Each Lagrangian particle carriesa number Nd of model molecules. Tracking is thus performed for Npart particlesinstead of Npart × Nd molecules, using a very accurate fourth-order Runge-Kuttascheme within the parent element. Along the path of each particle, LPM solves thestochastic differential equation (1.10) for each of the Nd molecules. Note that LPMcan be used either with uncorrelated or correlated local ensembles of model mole-cules. In the first case, Npart × Nd independent Wiener processes drive the stochasticevolution ofmolecular configurations, as in a CONNFFESSIT simulation. In the sec-ond case, the same initial ensemble of molecules is used in each Lagrangian particle,and the same Nd independent Wiener processes are generated to compute the con-figuration of corresponding molecules in each particle. In fact, LPM with correlated

22 1 Multi-scale Modeling and Simulation of Polymer Flow
ensembles of molecules can be viewed as a (Lagrangian) method of characteristicsfor solving the evolution equation (1.29) that governs a particular Brownian configu-ration field; the number N f of fields then corresponds to the number Nd of moleculescarried by each Lagrangian particle. The updated viscoelastic stress is computed ateach Lagrangian particle by means of a local ensemble average involving the con-figurations of Nd molecules. At the end of a typical time step for the solution of theconservation laws, we have at our disposal values of the viscoelastic stress at discreteLagrangian particles with a known position. These Lagrangian results then feed theEulerian discretized momentum balance as follows: within each finite element, LPMcomputes the linear least-squares polynomial that best passes through the availableLagrangian stress data. Clearly, this procedure requires that at least three Lagrangianparticles be present in each element at all times. LPM results obtained for non-lineardumbbells [21] are in excellent agreement with those provided by the method ofconfiguration fields.
Use of LPM with highly graded finite element meshes requires a large numberof Lagrangian particles. This motivated the development of the adaptive Lagrangianparticle method (ALPM) in [17]. At each time step, ALPM ensures that all ele-ments of the mesh have a number of Lagrangian particles in the user-specified inter-val [N elt,min
part , N elt,maxpart ]. This necessitates an elaborate adaptive procedure wherein
Lagrangian particles are either created or destroyed. Once a new particle is created,the configuration of the local Nd molecules must be properly initialized in orderto allow for the subsequent solution of the stochastic differential equation (1.10)along the particle’s path. Initialization is performed at the element level, by meansof a least-squares approximation based on the current configuration of molecules inneighbouring particles. ALPM is superior to LPMboth in terms of cost and numericalaccuracy. Unfortunately, it is muchmore intricate to implement, and can only be usedwith correlated local ensembles in view of the initialization step for newly-createdparticles.
A further development of LPM is the backward-tracking Lagrangian particlemethod (BLPM) [55]. Instead of dropping Lagrangian particles into the flow andfollowing them through the flow domain, the particle positions at which the vis-coelastic stress is evaluated are fixed and specified a priori. The stress is computedby tracking the particles backwards in time over a single time step Δt , evaluatingsuitable initial values of configurations at that point, and then integrating the stochas-tic differential equation forwards along the obtained trajectories. Let rB denote anarbitrary fixed position in the mesh. In general, the particle trajectory leading to thatposition changes from one time step to the next, so that different Lagrangian particlesarrive at rB as time evolves. The position rI at tn−1 of the Lagrangian particle whichis located at rB at current time tn is obtained by integrating (1.26) backwards in time,
rI = rB −∫ tn
tn−1
v dt. (1.33)
Then, starting from the previously computed values of the Nd molecular configu-rations X j at rI and time tn−1, one obtains the updated configurations at rB and tn

1.4 Micro-Macro Simulations Using the Stochastic Approach 23
by integrating the stochastic differential equation (1.10) along the path joining rI
and rB . The initialization process requires that an Eulerian field be computed fromthe Lagrangian data for each realization X j and at each time step. As with ALPM,correlated ensembles of molecules must be used for the initialization process to bemeaningful. In [55], BLPM has been implemented for two-dimensional transientflows of non-linear dumbbell models. In each quadrilateral element of the mesh, thefixed positions rB are defined at the nine nodal positions.
For all problems which can be solved with correlated ensembles of model mole-cules, BLPM is the best available Lagrangian particle method, both in terms ofnumerical behaviour and cost. BLPM is also very efficient in continuum simulationswith a constitutive equation of differential type [56, 58]. More generally, Lagrangianparticle methods take account in a most natural way of the purely convective natureof both the deterministic and stochastic differential equations (1.3) and (1.10).
1.4.5 Variance Reduction
The stochastic formulation of viscoelastic flows raises several mathematical issues offundamental interest. In particular, an important topic is that of the statistical varianceof the numerical solution. In the continuous (or exact) formulation of the coupledproblem, the velocity and viscoelastic stress fields are deterministic, while onlythe molecular configurations are random. In the discrete problem, all variables arerandom and the numerical accuracy of a simulation is dictated by the variance of thediscrete variables. In practice, a large variance in the numerical results would implythat independent micro-macro simulations yield vastly different solutions for thesame flow problem.We have already discussed a significant beneficial effect of usingcorrelated ensemble of model molecules: at each time step, the approximate velocityand viscoelastic stress fields are much smoother functions of x than those obtainedwith uncorrelated ensembles. But what is the effect on the variance? It has beenshown in [21], by means of numerical experiments, that use of correlated ensemblesreduces the variance of the velocity but increases the variance of the viscoelasticstress. This counter-intuitive experimental finding must be due to the non-linearcoupling between the conservation laws and the stochastic differential equations.Indeed, for a given deterministic velocity field, the variance of the approximatestress is not affected by the spatial dependence of the Wiener processes.
1.5 Micro-Macro Simulations Using the Fokker-PlanckApproach
We have seen in the previous section that control of the statistical noise is a majorissue in stochastic micro-macro simulations. This problem does not arise at all in theFokker-Planck approach, since the viscoelastic stress τ p and the primary unknown

24 1 Multi-scale Modeling and Simulation of Polymer Flow
fields (v, p, ψ) governed by Eqs. (1.5), (1.8) and (1.9) are deterministic quantities.The difficulty, however, is that the Fokker-Planck equation (1.5) must be solved forψin both physical and configuration spaces. This necessitates a suitable discretizationprocedure for all relevant variables, namely position x, configuration X, and timet (in transient flow). The dimensionality of the problem can be daunting, and con-sideration of molecular models with many configurational degrees of freedom doesnot appear feasible. This probably explains why relatively few studies based on theFokker-Planck approach have appeared in the literature. The recent introduction ofthe powerful technique now know as Proper Generalized Decomposition (PGD) hasopened theway for robust and efficient simulationswith the Fokker-Planck approach,as discussed in the sequel.
1.5.1 Proper Generalized Decomposition
Problems defined in high-dimensional spaces abound. For example, we have seenthat coarse-grained models of kinetic theory result in a Fokker-Planck equation forthe distribution function that must be solved in both configuration space, physicalspace and temporal domain. Until recently (circa 2005), the direct numerical solutionof the Fokker-Planck equation has been limited to models having but few (2 or 3)configurational degrees of freedom (see e.g. the review [31]).
In [1, 2], a new technique has been proposed that is able to circumvent, or at leastalleviate, the curse of dimensionality. This method is based on the use of separatedrepresentations. It basically consists in constructing by successive enrichment anapproximation of the solution in the form of a finite sum of N functional productsinvolving d functions of each coordinate. In contrast with the shape functions of clas-sical methods, these individual functions are unknown a priori. They are obtained byintroducing the approximate separated representation into the weak formulation ofthe original problem and solving the resulting non-linear equations. The complexityof the method grows linearly with the dimension d of the space wherein the problemis defined, in vast contrast with the exponential growth of classical mesh-based tech-niques. The method was later coined Proper Generalized Decomposition (or PGD),as in many cases the number N of terms in the separated representation needed toobtain an accurate solution is found to be close to that of the optimal decomposi-tion obtained by applying a posteriori the Proper Orthogonal Decomposition to theproblem solution. The PGD is detailed in a recent book [9].
Let us briefly present the main ideas behind the PGD by considering an abstractproblem defined in a space of dimension d for the unknown field u(x1, . . . , xd).Here, the coordinates xi denote any usual coordinate (scalar or vectorial) related tophysical space, time, or conformation space, for example, but they could also includeproblem parameters such as boundary conditions or material parameters. We seek asolution for (x1, . . . , xd) ∈ Ω1 × · · · × Ωd .

1.5 Micro-Macro Simulations Using the Fokker-Planck Approach 25
The PGD yields an approximate solution in the separated form:
u(x1, . . . , xd) ≈N∑
i=1
F1i (x1) × · · · × Fd
i (xd). (1.34)
The PGD approximation is thus a sum of N functional products involving eacha number d of functions F j
i (x j ) that are unknown a priori. It is constructed bysuccessive enrichment, whereby each functional product is determined in sequence.At a particular enrichment step n +1, the functions F j
i (x j ) are known for i ≤ n fromthe previous steps, and one must compute the new product involving the d unknownfunctions F j
n+1(x j ). This is achieved by invoking the weak form of the problemunder consideration. The resulting discrete system is non-linear, which implies thatiterations are needed at each enrichment step. A low-dimensional problem can thusbe defined in Ω j for each of the d functions F j
n+1(x j ).If M nodes are used to discretize each coordinate, the total number of PGD
unknowns is N × M × d instead of the Md degrees of freedom involved in standardmesh-based discretizations. Moreover, all numerical experiments carried out to datewith the PGD show that the number of terms N required to obtain an accurate solutionis not a function of the problem dimension d, but it rather depends on the regularityof the exact solution. The PGD thus avoids the exponential complexity with respectto the problem dimension.
In many applications studied to date, N is found to be as small as a few tens, andin all cases the approximation converges towards the solution associated with thecomplete tensor product of the approximation bases considered in each Ω j . Thus,we can be confident about the generality of the separated representation (1.34),but its optimality depends on the solution regularity. When an exact solution of aparticular problem can be represented with enough accuracy by a reduced numberof functional products, the PGD approximation is optimal. If the solution is a non-separable function for the particular coordinate systemused, the PGDsolver proceedsto enrich the approximation until including all the elements of the functional space,i.e. the Md functions involved in the full tensor product of the approximation basesin each Ω j . For more details, see [9].
1.5.2 PGD Simulations of the Multi-bead-Spring FENE Model
In [1], the PGD has been used to compute solutions of the Fokker-Planck equation,for given flow kinematics, in configuration spaces of dimension 20 using the Multi-Bead-Spring FENE model of dilute polymer solutions.
TheMBS FENE chain consists of d +1 beads connected by d non-linear entropicsprings [4]. The molecular configuration is thus given by the concatenation of dend-to-end connecting vectors Q j for each spring, i.e. X = (Q1, . . . , Qd). Forhomogeneous flows, the pdf is of the form Ψ (Q1, . . . , Qd , t) and its evolution is

26 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.4 PGD simulation of steady-state simple shear flow of the Multi-Bead-Spring FENE model(10 springs with 2D orientation). First mode for end spring (left) and central spring (right)
governed by a Fokker-Planck equation of the general form (1.5). In order to demon-strate the applicability of the PGD, the authors considered steady-state, simple shearflow calculations for chains with 10 springs having 2D orientation [1]. The distribu-tion function, thus defined in a space of dimension 20 (!), is sought in the separatedform
Ψ (Q1, . . . , Q10) ≈N∑
j=1
F1j (Q1) × · · · × F10
j (Q10). (1.35)
Amesh consisting of 104 nodeswas used for approximating each function Fkj (Qk). A
simple shear flowwas applied (W e = √2) and 3 terms in the separated representation
were found sufficient to accurately describe the steady-state distribution function.Wedepict in Fig. 1.4 the functions defining the first mode for the end and central springs,i.e. functions Fk
1 (Qk), k = 1 and 5. Notice that the results are sharper at the center ofthe chain, indicating that the central springs are more stretched than the ones locatednear the chain ends.
This particular simulation implied 10×104 = 105 degrees of freedom (10 springconnectors whose approximation functions were defined using a mesh of 104 nodes).A standard finite element solutionwould have required of the order of (104)10 = 1040
degrees of freedom for computing an equivalent solution.

1.5 Micro-Macro Simulations Using the Fokker-Planck Approach 27
1.5.3 Fokker-Planck Simulations of Complex Flows
As in the stochastic approach, solution of the conservation and Fokker-Planck equa-tions are decoupled at each time step [31]. The new velocity field is inserted in theFokker-Planck equation, which is solved in configuration and physical spaces toupdate the distribution function ψ . To this end, use of a fully implicit method wouldbe prohibitively expensive. It is imperative to somehow decouple the computation inphysical space Ω from that in configuration space. In [38], the authors achieve thisby splitting each time step into two consecutive sub-steps,
ψ − ψn
Δt= − ∂
∂ X· {A ψn} + 1
2
∂
∂ X∂
∂ X: {D ψn}, (1.36)
ψn+1 − ψ
Δt+ vn · ∇ψn+1 = 0. (1.37)
Equation (1.36) for the intermediate value ψ is defined at each collocation point ofthe spectral element mesh covering the flow domain Ω . It is solved by means of aGalerkin spectral method. The first sub-step is thus an ensemble of explicit, localupdates in configuration space. The second sub-step (1.37) is an implicit, globalupdate of the distribution function in physical space. This has been implemented forvarious low-dimensional kinetic theory models (NC = 2 or 3).
Being relatively new, the PGD remains to be fully exploited for simulating com-plex polymer flows. It has however been applied in the context of complex flows offiber suspensions [42, 47], which, as we shall see in the next chapter, involve micro-macro governing equations that have a very similar generic form as those discussedhere. In [42], the authors considered a suspension of rod-like rigid particles whichcan flocculate to create aggregates. These aggregates are continuously broken by theflow. Thus, aggregation and disaggregation mechanisms coexist and two populationsof particles can be identified: the one related to free rods (pendant population) andthe one associated with the aggregated rods (active population). The kinetic theorydescription of such systems contains two coupled Fokker-Planck equations for theorientation distributionΨ (p, x, t) andΦ(p, x, t) of the active and pendant rigid rods,respectively. Here, the configuration of rods, i.e. their orientation, is given by the unitvector p.
The authors [42] considered the flow in a converging channel. The steady-stateflow kinematics (assumed undisturbed by the presence of the suspended particles)were computed by solving the Stokes equations. The coupled Fokker-Planck equa-tions were integrated along individual flow streamlines, with separated representa-tions for both orientation distribution functions:
(Ψ (p, s)Φ(p, s)
)≈
N∑i=1
(PΨ
i (p) · SΨi (s)
PΦi (p) · SΦ
i (s)
). (1.38)
Here, s denotes the curvilinear coordinate along a chosen streamline.

28 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.5 Fokker-Planck simulation of a complex flow of a two-population fiber suspension [42].Orientation distribution of active (Ψ ) and pendant (Φ) populations in a converging flow. The orien-tation distribution is represented on the unit sphere at various positions along individual streamlines
Figure1.5 shows the resulting orientation distribution of both populations atparticular points along individual flow streamlines. The orientation distribution isdirectly depicted on the unit surface, and the colour scheme indicates the intensityof the orientation in each direction.
1.6 The Impact of Closure Approximations
In [28], we have shown for the simplest non-linear kinetic theory of dilute polymericsolutions (FENE dumbbells), that the Peterlin closure approximation used to derive amacroscopic constitutive equation (FENE-P) has a significant impact on the statisticaland rheological properties of themodel. To do so, we have compared results obtainedfor given flow kinematics with both the FENEmodel and its FENE-P approximation.
Figure1.6 shows typical results for start-up of elongational flow, in terms of thetemporal evolution of the mean square polymer extension and the polymer contribu-tion to the stress. Results for the FENEmodel are obtained either by solving the FENEstochastic differential equation (line) or the Fokker-Planck equation (circles) given

1.6 The Impact of Closure Approximations 29
Fig. 1.6 Start-up of elongational flow for FENE and FENE-P fluids [28]
Fig. 1.7 Inception of elongational flow for FENE and FENE-P fluids [28]
in Sect. 1.3.4.1. In this particular example, the final steady-state values reached withFENE and FENE-Pmodels are identical, while the transients differ significantly. Thisresult, obtained for specified homogeneous kinematics, is relevant to more complexflow situations. Indeed, in a complex flow field, the polymer molecules experience atime-dependent velocity gradient (at least in the Lagrangian sense) as they are con-vected along the flow trajectories. We thus expect drastic differences in simulationsof complex flows between the FENE kinetic theory and its approximate FENE-Pversion, as we shall see in Sect. 1.7.3.
Differences between FENE and FENE-P results are even more drastic when onelooks at their statistical properties. We show in Fig. 1.7 the distribution of dumbbelllength obtained in start-up of elongational flow. A total of 103 FENE or FENE-Pdumbbells were used in these stochastic simulations, whose results are shown herein the form of histograms. The initial condition is that of equilibrium. For FENEdumbbells, the distribution evolves in time towards a highly-extended state localizednear the maximum dumbbell length Q0 (green dot). The FENE-P dumbbells behavein a very different manner. Indeed, many individual dumbbells do cross the limitQ0 as they are deformed by the flow field. Moreover, the steady-state distribution is

30 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.8 Start-up of elongation followed by relaxation [37]. FENE model (thick curve), FENE-Pclosure (dotted curve), two FENE-L closures (other curves)
drastically different from that obtained with the FENE dumbbells. In fact, it can beshown that the configuration distribution function for FENE-P dumbbells is alwaysGaussian, and thus never localized, whatever the flow kinematics. Thus, nothing pre-vents individual FENE-P dumbbells from deforming beyond the maximum allowedlength Q0 of the FENE theory. It is only the average 〈Q2〉 that is bounded for FENE-Pdumbbells. Clearly, the Peterlin closure approximation has somewhat polluted thevery meaning of the parameter Q0 of the underlying molecular theory. These resultshave motivated the development of more sophisticated and much more accurate clo-sure approximations known as FENE-L models [36, 37].
The above results do not tell the whole story. In [37, 50], we have consideredinception of elongational flow followed by relaxation. Figure1.8 compares the tem-poral evolutions of the polymer stress andmean square molecular extension obtainedwith the FENE model and its various FENE-P and FENE-L approximations. In thisnumerical experiment, cessation of flow occurs at dimensionless time of 1.5.
Clearly, the two FENE-L closure models are more accurate than FENE-P. Butmore importantly, it is useful to plot, for the same numerical experiment, the polymerstress as a function of molecular extension for various values of time, as indicatedby the dots in Fig. 1.8. The resulting plot, shown in Fig. 1.9, is quite surprising inthat the FENE model shows a hysteresis. This feature is highly significant as itrules out the existence of a stress-optic law for FENE dumbbells wherein the stress-optic coefficient would be a function of the second moment of the configurationdistribution function alone [50]. While the two FENE-L closure models also predicta hysteresis in qualitative agreementwith the parent FENE theory, the Peterlin closureapproximation (red curve) simply obliterates hysteric behaviour altogether.
Thus, we see that closure approximations can have a dramatic qualitative impactindeed. A similar conclusion has been reached in the study of chaotic dynamics insheared liquid crystalline polymers [20].

1.7 Illustrative Examples of Complex Flow Simulations 31
Fig. 1.9 Hysteresis in start-up of elongation followed by relaxation [37]
1.7 Illustrative Examples of Complex Flow Simulations
In this section, we present a selection of complex polymer flow simulations obtainedover the years in our group. The discussion is by necessity extremely brief, and thereader is invited to consult the references for a deeper exposition.
1.7.1 Early Macroscopic Simulations
We first show macroscopic simulation results obtained in the early 1980s. While thenumerical techniques developed in these pioneering days are now for the most partoutdated, these results were then the first successful attempts at predicting significantviscoelastic effects in complex flows. Also shown are corresponding experimentalobservations [5].
In Fig. 1.10, we consider die swell of an Oldroyd-B fluid, computed with a mixedfinite element method and a suitable algorithm to handle the a priori unknown freesurface [11]. Significant die swell is predicted at highWe. A zoomof themesh close tothe die exit is shown, as well as the predicted streamlines.While the mesh would nowbe considered rather coarse, these calculations were then taxing available computerresources to their limit.
Prediction of the vortex growth observed in steady-state flow of dilute solutionsthrough an abrupt contraction has been another early challenge in this community.Figure1.11 shows the finite element results [24] obtainedwith the PhanThien-Tanner

32 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.10 Die swell: early numerical results for the Oldroyd-B fluid [11]
Fig. 1.11 Flow through a contraction: early numerical results for the Phan Thien-Tanner fluid [24]

1.7 Illustrative Examples of Complex Flow Simulations 33
Fig. 1.12 Jet breakup: early numerical results for the Oldroyd-B fluid [6, 26]
fluid, a constitutive equation derived from the kinetic theory of temporary polymericnetworks. The predicted viscoelastic vortex is indeed significantly bigger than itsNewtonian counterpart.
Finally, we show in Fig. 1.12 the simulation of viscoelastic jet breakup obtainedwith the Oldroyd-B fluid [26]. This is a moving boundary problem driven by sur-face tension. We show snapshots of the axisymmetric computational domain, whichextends over half the wave length of the disturbance, as well as a comparisonbetween experiments and numerical predictions for the temporal evolution of thejet radius disturbance [6]. Quantitative agreement with experimental data for a dilutepolymer solution is obtained, revealing the significant stabilizing effect of elonga-tional stresses. Access to a supercomputer (a Cray X-MP) was mandatory to runthese demanding simulations.
1.7.2 Macroscopic Simulations with Advanced Models
Here, we discuss recent simulation results [58] obtained with constitutive equationsand a numerical technique that are representative of the current state of the art.The rheological models are the so-called decoupled or coupled Double-Convection-Reptation models with Chain Stretch (DCR-CS) [40, 57]. These have been derivedvia a tube theory that goes much beyond the Doi-Edwards model discussed in

34 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.13 The decoupled double-convection-reptation model with chain stretch [40]
Fig. 1.14 Zoom of 4:1:4 constriction geometry with rounded corners and medium-size mesh [58]
Sect. 1.3.4.2. Bothmodels account, but in a differentmanner, for reptation, convectiveconstraint release, and Rouse relaxation. The equations for the decoupled DCR-CSmodel are shown in Fig. 1.13. Here, the orientation tensor S and tube stretch λ arepre-averaged separately and each is governed by its own evolution equation. Themodel has 4 material parameters, shown in red.
In [58], we considered the start-up flow through an axisymmetric 4:1:4 constric-tion with rounded corners, depicted in Fig. 1.14 along with the mesh. Steady-stateregimes were obtained as a long-time limit of transient BLPM simulations startingfrom the equilibrium state.

1.7 Illustrative Examples of Complex Flow Simulations 35
Fig. 1.15 Boundary layer for the second invariant of the rate of strain tensor [58]
Fig. 1.16 DCR-CS models: predicted vortex growth with increasing Weissenberg number [58]
Figure1.15displays the contours of the second invariant of the rate-of-deformationtensor at the highestWeissenberg number for which we have performed calculations,W e = 50. A boundary layer develops near the constriction wall. This is quite achallenge for any numerical technique, and is typical of viscoelastic flows in con-fined complex geometries.
Steady-state streamlines are shown in Fig. 1.16.With both coupled and decoupledmodels, a significant vortex growth is predicted.
High-We results obtained with the coupled DCR-CS model are given in Fig. 1.17.As shown in Fig. 1.18, large levels of tube stretch, close to the specified maximumvalue λmax = 2.5, are predicted by the coupled DCR-CS model at high-We. Thesecorrelate with significant upstream vortex activity.

36 1 Multi-scale Modeling and Simulation of Polymer Flow
Fig. 1.17 Results obtained with the coupled DCR-CS model at high Weissenberg number [58]
Fig. 1.18 Tube stretch predicted with the coupled DCR-CS model [58]
1.7.3 Impact of Closure Approximations in Complex Flows
We end this section with an illustrative example of the use of the micro-macro sto-chastic approach for simulating a complex flow. In [55], we used BLPM to computethe transient flow of a FENE fluid in a 4:1 contraction, starting from rest. The sameflow was also simulated with the FENE-P model, with identical flow and materialparameter values, in order to assess the impact of the closure approximation.
Figure1.19 shows the temporal evolution of the streamlines for both FENE andFENE-P fluids. A steady-state is reached at a dimensionless time of about 10. It isclear from these results that the Peterlin closure approximation has a dramatic impacton the predicted macroscopic flow features: the FENE model exhibits a corner anda lip vortex, while the FENE-P approximation shows a big corner vortex only.
1.8 Discussion
Following [29], we end this chapter with a few personal remarks on computationalrheology.

1.8 Discussion 37
Fig. 1.19 Start-up flow through a contraction computed with BLPM: FENE versus FENE-P [55]
1.8.1 From Numbers to Rheology
From a user’s viewpoint, any serious exercise in computational rheology should inour opinion follow a three-step path: (1) get the numbers, (2) check their numericalaccuracy, and (3) check their physical accuracy.
At the outset, step (1) was found to be by no means a trivial matter: obtainingnumerical solutions of the discrete, non-linear algebraic equations at significant val-ues of the Weissenberg number We has long been difficult or even impossible (thisis known as the High Weissenberg Number Problem or HWNP, which is discussedin detail in [25, 27]).
Though overlooked at times, the importance of step (2) is simply paramount.One must indeed convince oneself and others that the numerical results obtainedconstitute sufficiently accurate approximations of the exact solutions of the governingequations. Since the mathematical analysis of numerical methods for viscoelasticfluids is quite difficult and of limited applicability to complex flows, step (2) is usuallyperformed by means of careful (and often expensive) mesh refinement experiments.
Finally, step (3) questions the very validity of the physical model that is imple-mented in the computer simulation (constitutive equation or molecular model, val-ues of the material parameters, initial and boundary conditions). It is performed bycomparing simulation results (such as flow kinematics, overall pressure drop, andbirefringence) to available experimental observations. Since the pioneering days,overall progress along this three-step path has been sometimes chaotic but overallquite steady. Difficulties do remain, however, some of which we now wish to discussbriefly.

38 1 Multi-scale Modeling and Simulation of Polymer Flow
1.8.2 The Infamous HWNP and Mesh Convergence
It is fair to state that the HWNP is now partially resolved, in that high-We numericalsolutions have been reported over the years for a variety of flow problems. It could beargued, however, that viscoelastic flow computations are not yet the routine and safeprocedure that more classical sub-fields of computational mechanics (e.g. numericallinear elasticity) have generated, and that their success is not guaranteed even in thevery restricted sense of “getting the numbers”.
Many, if notmost, viscoelastic flowproblems of interest are characterized by stresssingularities or boundary layers of essentially unknown mathematical structure. Inthis context, an outside observer should not necessarily be impressed by the high-Wesolutions reported in the literature. Indeed, some have been generated with numericalschemes that either explicitly or implicitly smooth out the difficulties. A similar issuearises in classical CFD of Newtonian fluids, in the quest for numerical solutionsat high Reynolds numbers. Getting high-Re or high-We (smooth) solutions usingrisky, “false-diffusion” numerical schemes often essentially means that the numericshave computed an approximate solution to a different problem than the one underinvestigation.
One could argue that mesh refinement experiments (step (2) alluded to above)would readily settle the matter of numerical accuracy. When feasible, as far ascomputer resources are concerned, these are unfortunately not always successfulin that the range of Weissenberg numbers that can be covered in the simulations maydecrease as the grid is further refined [25, 27]. This problem often occurs in thepresence of a stress singularity, thus preventing the safe interpretation of the rheo-logical results obtained in the vicinity of the singular point. One should also keepin mind that a mesh refinement experiment, while essential in assessing the accu-racy of the numerical results, does not constitute a rigourous mathematical proof ofconvergence.
In a seminal paper [15], the authors have shown that a large class of differentialconstitutive models can be transformed into an equation for the matrix logarithmof the conformation tensor. Under this transformation, the extensional componentsof the deformation field act additively, rather than multiplicatively. As discussed in[15], this transformation is motivated by numerical evidence that the HWNP maybe caused by the failure of polynomial-based approximations to properly representexponential profiles developed by the conformation tensor. The log-conformationapproach significantly alleviates the HWNP [16, 23].
Finally, the above discussion does not imply, of course, that all results reportedin the literature for high values of We are necessarily inaccurate. We simply wishto stress that the significant advances made over the last two decades in expandingthe field to more detailed levels of description of polymeric liquids should not hidethe absolute necessity of careful numerical validation of present and future methods,whether they be macroscopic, micro-macro, or atomistic. The role of benchmarkflow problems is crucial in this regard [12].

1.9 Conclusions 39
1.9 Conclusions
Themulti-scale modeling of viscoelastic flows is an exciting development in compu-tational rheology, which nicely complements the efforts made by the community onmore conventional continuum simulations. Micro-macro methods allow the analysisof complex flow using a kinetic theorymodel that does not have an equivalent closed-form constitutive equation. The difficult theoretical problem of obtaining accurateclosure approximations is thus bypassed altogether, and the computational rheol-ogist gains access to a potentially much wider modeling space. Micro-macro tech-niques are of coursemoredemanding in computer resources than continuummethods,but they are generally easier to implement efficiently on parallel computers. Untilrecently, available stochastic and Fokker-Planck micro-macro techniques have beenimplemented for models of kinetic theory having but few configurational degrees offreedom. Introduction of the Proper Generalized Decomposition has changed the sit-uation drastically, as this new technique opens the way for micro-macro simulationswith more advanced kinetic theory models.
This short survey of modeling and numerical approaches in computational rheol-ogy applied to polymeric liquids demonstrates that the field has expanded consider-ably in scope since its inception thirty five years ago. In the early days, researcherswere struggling to compute the flow of memory liquids using constitutive equa-tions of very limited (though not altogether vanishing) value for rheological studies,such as the second-order fluid and the upper-convected Maxwell model. Computingwith these “simple” constitutive equations is very difficult indeed, as the communitysoon discovered with surprise and dismay. The problems met then by all players inthe field launched a series of numerical and mathematical investigations, constantlynourished by challenging experimental observations such as those on Boger fluids,which significantly increased our understanding of the basic issues. In particular,that more complex and realistic models are actually easier to exploit in numericalstudies, once the proper numerical methodology has been developed, is a welcomeand healthy fact that has long been reported and continuously been witnessed since.Computational rheology has clearly gone a long way since the first attempts (back inthe mid 1970s) to predict the flow of a memory fluid in a complex geometry. Today,the most sophisticated constitutive equations and molecular models developed bytheoretical rheologists can in principle be implemented numerically. Furthermore,our colleagues active in experimental work make an increasing use of simulationsoftware to gain further insight into their observations on real materials. Finally,very detailed molecular dynamics simulations are becoming feasible that shouldhelp us to elucidate difficult issues such as wall rheology. These facts are a clearsignature of progress. Difficult issues do remain, however, which point to the ever-present need for the careful evaluation of numerical techniques in benchmark flowproblems. The numerical challenges met by computational rheologists are intimatelylinked to mathematical and physical considerations. This makes computational rhe-ology fascinating, difficult, and altogether fun. On the modeling side, computationalrheology will continue to be exploited for the evaluation and use in complex flows of

40 1 Multi-scale Modeling and Simulation of Polymer Flow
theoretical models for the polymer dynamics. It will help identify the actual math-ematical structure of boundary layers and stress singularities observed in many cir-cumstances. It will also help the theoretical rheologist assess the relative importanceof the particular physical mechanisms put forward in his or her theories. One couldalso envisage using a modeling approach which would couple, in an automatic andadaptive fashion, different levels of description of the same fluid in different regionsof the flow. For example, detailed atomistic models could be used to describe thesolid wall and its immediate fluid vicinity, while a series of kinetic theory and contin-uum mechanics models of decreasing levels of detail could be used at progressivelylarger distances from the wall. The proper matching between the different modelingdomains would be done automatically. Most probably, very different numerical tech-niques, best suited to the local level of description, would be used in each domain.The corresponding numerical scheme would thus be adaptive both in numerical andmodeling terms. These indeed are exciting and challenging perspectives for brightstudents now entering the field.
References
1. A. Ammar, B. Mokdad, F. Chinesta, R. Keunings, A new family of solvers for some classesof multidimensional partial differential equations encountered in kinetic theory modeling ofcomplex fluids. J. Non-Newtonian Fluid Mech. 139, 153–176 (2006)
2. A. Ammar, B. Mokdad, F. Chinesta, R. Keunings, A new family of solvers for some classesof multidimensional partial differential equations encountered in kinetic theory modeling ofcomplex fluids. Part II. J. Non-Newtonian Fluid Mech. 144, 98–121 (2007)
3. R.B. Bird, R.C. Armstrong, O. Hassager, Dynamics of Polymeric Liquids, Volume 1: FluidMechanics (Wiley, New York, 1987)
4. R.B. Bird, C.F. Curtiss, R.C. Armstrong, O. Hassager, Dynamics of Polymeric Liquids, Volume2: Kinetic Theory (Wiley, Mew York, 1987)
5. D.V. Boger, K. Walters, Rheological Phenomena in Focus (Elsevier, New York, 1993)6. D.W. Bousfield, R. Keunings, G. Marrucci, M.M. Denn, Nonlinear analysis of the surface
tension driven breakup of viscoelastic filaments. J. Non-Newtonian Fluid Mech. 21, 79–97(1986)
7. B. Busic, J. Koplik, J.R. Banavar, Molecular dynamics simulation of liquid bridge extensionalflows. J. Non-Newtonian Fluid Mech. 109, 51–89 (2003)
8. F. Chinesta, A. Ammar, A. Leygue, R. Keunings, An overview of the Proper GeneralizedDecomposition with applications in computational rheology. J. Non-Newtonian Fluid Mech.166, 578–592 (2011)
9. F. Chinesta, R. Keunings, A. Leygue, The Proper Generalized Decomposition for AdvancedNumerical Simulations. A Primer (Springerbriefs) (Springer, New York, 2014)
10. M. Cieplak, J. Koplik, J.R. Banavar, Boundary conditions at a fluid-solid interface. Phys. Rev.Lett. 86, 803–806 (2001)
11. M. Crochet, R. Keunings, Finite element analysis of die swell of a highly elastic fluid. J.Non-Newtonian Fluid Mech. 10, 339–356 (1982)
12. F.A. Cruz, R.J. Poole, A.M. Afonso, F.T. Pinho, P.J. Oliveira, M.A. Alves, A new viscoelasticbenchmark flow: stationary bifurcation in a cross-slot. J. Non-Newtonian Fluid Mech. 214,57–68 (2014)
13. J. Dealy, R.G. Larson, Structure and Rheology of Molten Polymers (Hanser Publications,Munich, 2006)

References 41
14. M. Doi, S.F. Edwards, The Theory of Polymer Dynamics (Clarendon Press, Oxford, 1987)15. R. Fattal, R. Kupferman, Constitutive laws for the matrix-logarithm of the conformation tensor.
J. Non-Newtonian Fluid Mech. 123, 281–285 (2004)16. R. Fattal, R. Kupferman, Time-dependent simulation of viscoelastic flows at highWeissenberg
number using the log-conformation representation. J. Non-Newtonian Fluid Mech. 126, 23–37(2005)
17. X. Gallez, P. Halin, G. Lielens, R. Keunings, V. Legat, The adaptive Lagrangian particlemethodformacroscopic andmicro-macro computations of time-dependent viscoelastic flows. Comput.Meth. Appl. Mech. Engng. 180, 345–364 (1999)
18. W.W. Graessley, Polymeric Liquids and Networks: Structure and Properties (Garland Science,New York, 2003)
19. W.W. Graessley, Polymeric Liquids and Networks: Dynamics and Rheology (Garland Science,New York, 2008)
20. M. Grosso, R. Keunings, S. Crescitelli, P.L. Maffettone, Prediction of chaotic dynamics insheared liquid crystalline polymers. Phys. Rev. Letters 86, 3184–3187 (2001)
21. P. Halin, G. Lielens, R. Keunings, V. Legat, The Lagrangian particle method for macroscopicand micro-macro viscoelastic flow computations. J. Non-Newtonian Fluid Mech. 79, 387–403(1998)
22. M.A. Hulsen, A.P.G. van Heel, B.H.A.A. van den Brule, Simulation of viscoelastic flows usingBrownian configuration fields. J. Non-Newtonian Fluid Mech. 70, 79–101 (1997)
23. M.A. Hulsen, R. Fattal, R. Kupferman, Flow of viscoelastic fluids past a cylinder at highWeissenberg number: stabilized simulations using matrix logarithms. J. Non-Newtonian FluidMech. 127, 27–39 (2005)
24. R. Keunings, M.J. Crochet, Numerical simulation of the flow of a viscoelastic fluid through anabrupt contraction. J. Non-Newtonian Fluid Mech. 14, 279–299 (1984)
25. R. Keunings, On the high Weissenberg number problem. J. Non-Newtonian Fluid Mech. 20,209–226 (1986)
26. R. Keunings, An algorithm for the simulation of transient viscoelastic flows with free surfaces.J. Comput. Phys. 62, 199–220 (1986)
27. R. Keunings, Simulation of viscoelastic fluid flow, in Fundamentals of Computer Modeling forPolymer Processing, ed. by C.L. Tucker III (Carl Hanser Verlag, Munich, 1989), pp. 402–470
28. R. Keunings, On the Peterlin approximation for finitely extensible dumbbells. J. Non-Newtonian Fluid Mech. 68, 85–100 (1997)
29. R. Keunings,A Survey of Computational Rheology. Plenary Lecture, ed. byD.M. Binding et al.Proceedings of 13th International Congress on Rheology, vol. 1 (British Society of Rheology,Glasgow, 2000), pp. 7–14
30. R. Keunings, Finite Element Methods for Integral Viscoelastic Fluids, ed. by D.M. Binding,K. Walters. Rheology Reviews (British Society of Rheology, Glasgow, 2003), pp.167–195
31. R. Keunings, Micro-macro Methods for the Multi-scale Simulation of Viscoelastic Flow UsingMolecular Models of Kinetic Theory, ed. by D.M. Binding, K. Walters. Rheology Reviews(British Society of Rheology, Glasgow, 2004), pp. 67–98
32. R. Koopmans, J. Den Doelder, J. Molenaar, Polymer Melt Fracture (CRC Press, Boca Raton,2010)
33. J. Koplik, J.R. Banavar, Re-entrant corner flows of Newtonian and non-Newtonian fluids. J.Rheol. 41, 787–805 (1997)
34. R.G. Larson, The Structure and Rheology of Complex Fluids (Oxford University Press, NewYork, 1999)
35. M. Laso, H.C. Öttinger, Calculation of viscoelastic flow using molecular-models: the CON-NFFESSIT approach. J. Non-Newtonian Fluid Mech. 47, 1–20 (1993)
36. G. Lielens, P. Halin, I. Jaumain, R. Keunings, V. Legat, New closure approximations for thekinetic theory of finitely extensible dumbbells. J. Non-Newtonian Fluid Mech. 76, 249–279(1998)
37. G. Lielens, R. Keunings, V. Legat, The FENE-L and FENE-LS closure approximations to thekinetic theory of finitely extensible dumbbells. J. Non-Newtonian Fluid Mech. 87, 179–196(1999)

42 1 Multi-scale Modeling and Simulation of Polymer Flow
38. A. Lozinski, C. Chauvière, J. Fang, R.G. Owens, Fokker-Planck simulations of fast flows ofmelts and concentrated polymer solutions in complex geometries. J. Rheol. 47, 535–561 (2003)
39. C. Mangoubi, M.A. Hulsen, R. Kupferman, Numerical stability of the method of Brownianconfiguration fields. J. Non-Newtonian Fluid Mech. 157, 188–196 (2009)
40. G. Marrucci, G. Ianniruberto, Flow-induced orientation and stretching of entangled polymers.Philos. Trans. R. Soc. A 361, 677–688 (2003)
41. Y. Masubuchi, Simulating the flow of entangled polymers. Annu. Rev. Chem. Biomol. Eng. 5,11–33 (2014)
42. B.Mokdad,A.Ammar,M.Normandin, F. Chinesta, J.R. Clermont, A fully deterministicmicro-macro simulation of complex flows involving reversible network fluid models. Math. Comput.Simul. 80, 1936–1961 (2010)
43. H.C. Öttinger, M. Laso, Smart polymers in finite-element calculations, in Theoretical andApplied Rheology, ed. by P. Moldenaers, R. Keunings, Proceedings of XIth InternationalCongress on Rheology, vol. 1 (Elsevier, Amsterdam, 1992), pp. 286–288
44. H.C. Öttinger, Stochastic Processes in Polymeric Fluids (Springer, Berlin, 1996)45. R.G. Owens, T.N. Phillips, Computational Rheology (Imperial College Press, London, 2002)46. E.A.J.F. Peters, M.A. Hulsen, B.H.A.A. van den Brule, Instationary Eulerian viscoelastic flow
simulations using time separable Rivlin-Sawyers constitutive equations. J. Non-NewtonianFluid Mech. 89, 209–228 (2000)
47. E. Pruliere, A. Ammar, N. El Kissi, F. Chinesta, Recirculating flows involving short fibersuspensions:Numerical difficulties and efficient advancedmicro-macro solvers.Arch. Comput.Methods Eng, State Art Rev 16, 1–30 (2009)
48. H.K. Rasmussen, Catastrophic failure of polymer melts during extension. J. Non-NewtonianFluid Mech. 198, 136–140 (2013)
49. M. Rubinstein, R.H. Colby, Polymer Physics (Oxford University Press, Oxford, 2003)50. R. Sizaire, G. Lielens, I. Jaumain, R. Keunings, V. Legat, On the hysteretic behaviour of dilute
polymer solutions in relaxation following extensional flow. J. Non-Newtonian Fluid Mech. 82,233–253 (1999)
51. P.S. Stephanou, C. Baig, V.G. Mavrantzas, Projection of atomistic simulation data for thedynamics of entangled polymers onto the tube theory: calculation of the segment survivalprobability function and comparison with modern tube models. Soft Matter 7, 380–395 (2011)
52. R.I. Tanner. Engineering Rheology (Oxford University Press, Oxford, 2000)53. A.P.G. van Heel, M.A. Hulsen, B.H.A.A. van den Brule, Simulation of the Doi-Edwards model
in complex flow. J. Rheol. 43, 1239–1260 (1999)54. M.M. Villone, F. Greco, M.A. Hulsen, P.L. Maffettone, Simulations of an elastic particle in
Newtonian and viscoelastic fluids subjected to confined shear flow. J. Non-Newtonian FluidMech. 210, 47–55 (2014)
55. P. Wapperom, R. Keunings, V. Legat, The backward-tracking lagrangian particle method fortransient viscoelastic flows. J. Non-Newtonian Fluid Mech. 91, 273–295 (2000)
56. P. Wapperom, R. Keunings, Numerical simulation of branched polymer melts in transientcomplex flows using pom-pom models. J. Non-Newtonian Fluid Mech. 97, 267–281 (2001)
57. P. Wapperom, R. Keunings, G. Ianniruberto, Prediction of rheometrical and complex flowsof entangled linear polymers using the DCR model with chain stretch. J. Rheol. 47, 247–265(2003)
58. P. Wapperom, R. Keunings, Impact of decoupling approximation between stretch and orienta-tion in rheometrical and complex flow of entangled polymers. J. Non-Newtonian Fluid Mech.122, 33–43 (2004)
59. P. Wapperom, A. Leygue, R. Keunings, Numerical simulation of large amplitude oscillatoryshear of a high-density polyethylenemelt using theMSFmodel. J. Non-Newtonian FluidMech.130, 63–76 (2005)

Chapter 2Complex Flows of Micro/Nano StructuredFluids: Reinforced Polymer Composites
Abstract The motion of an ellipsoidal particle immersed in a Newtonian fluid wasstudied in the pioneering work of Jeffery in 1922. Suspensions of industrial interestusually involve particles with a variety of shapes. Moreover, suspensions composedof rods (a limit case of an ellipsoid) aggregate, leading to clusters with particularshapes that exhibit, when immersed in a flow, an almost rigid motion. In this chapter,we revisit the modeling and simulation of suspensions involving rods throughout thedifferent scales of description (microscopic, mesoscopic and macroscopic) and thedifferent concentration regimes (dilute, semi-dilute, semi-concentrated and concen-trated), involving gradually richer physics.
2.1 Introduction
Suspensions involving particles can be described at themicroscopic scale by trackingthe motion of each one of the particles involved in the system. This approach isbased on three main elements: (i) the knowledge of the equation governing theparticle motion in the fluid flow; (ii) the introduction of the particle effects on theflow kinematics if coupled simulations are envisaged; and (iii) the availability ofcomputational resources for tracking efficiently millions of particles.
In dilute suspensions, the motion of ellipsoidal particles can be accuratelydescribed by using Jeffery’s equation [1]. When the concentration becomes largeenough, interactions cannot be neglected any longer and the calculation becomesmore complex from the computational point of view. At this scale, currently avail-able simulations remain quite far from the scenarios of industrial interest.
For circumventing the difficulties related to simulations at the microscopic scale,these being more computational than conceptual, coarser models were introduced.The interested reader can refer to [2] and the references therein for a review onmulti-scale approaches in the context of computational rheology.
Mesoscopic kinetic theory models result from coarsening microscopicdescriptions. In kinetic theory models the individuality of the particles is lost infavour of a statistical description that substitutes the entities by a series of confor-mation coordinates [3, 4]. For example, when considering a suspension of rods, the
© The Author(s) 2015C. Binetruy et al., Flows in Polymers, Reinforced Polymersand Composites, SpringerBriefs in Applied Sciences and Technology,DOI 10.1007/978-3-319-16757-2_2
43

44 2 Complex Flows of Micro/Nano Structured Fluids . . .
mesoscopic description consists in giving the fraction of rods that at position x andtime t are oriented along direction p. This information is contained in the probabil-ity distribution function—pdf—whose conservation balance results in the so-calledFokker-Planck equation governing its evolution. Fokker-Planck equations involvethe flow induced conformation evolution. In the case of a suspension of rods, theflow induced conformation (orientation) evolution is given, as indicated above, byJeffery’s equation. Since the pdf depends on the physical coordinates (space and time)and a series of conformational coordinates, the associated Fokker-Planck equation ismultidimensional. Standardmesh-based discretization techniques fail when address-ing multidimensional models. This issue is known as the curse of dimensionality andit explains the few number of existing works addressing the solution of kinetic theorymodels within the Fokker-Planck framework.
For circumventing the curse of dimensionality at the mesoscopic scale, severaltechniques based on the use of particles were proposed and widely employed. Herethe particles are not real particles, but rather should be viewed as computationalparticles that allow one to describe themain suspension features (rheology, propertiesrelated to the particles conformation, etc.). Despite the fact of considering a discretedescription, the level of detail in the description and the richness of the physics isexactly the same that the one associated with the use of Fokker-Planck descriptions,and obviously the solutions computed by using both descriptions are in the limit ofconvergence exactly the same.
The use of the continuous description based on the solution of the Fokker-Planckequation remains challenging because of the high dimensionality that it involves.On the other hand, when employing its discrete counterpart, the main difficulty isrelated to the extremely large number of particles to be considered. This numberdepends on the model output of interest. When only the moments of the distributionare concerned, a moderate number of particles is enough. However, when one isinterested in the pdf itself, the number of computational particles could becomeextremely large.
Solution procedures based on the use of particles at the mesoscopic scale havebeen extensively employed by many authors [5–13]. On the other hand, there arefew works focusing on the solution of Fokker-Planck equations by using standarddiscretization techniques [7, 14]. We proposed some years ago a new solution tech-nique called Proper Generalized Decomposition based on the use of separated rep-resentations in order to ensure that the complexity scales linearly with the modeldimensionality [15, 16]. This technique consists in expressing the unknown fieldas a finite sum of functional products, i.e. expressing a generic multidimensionalfunction u(x1, . . . , xd) as:
u(x1, . . . , xd) ≈i=N∑i=1
F1i (x1) · · · Fd
i (xd). (2.1)
The interested reader can refer to [17–19] and the references therein for a deepanalysis of this technique and its applications in computational rheology.

2.1 Introduction 45
At the macroscopic scale, the pdf is substituted by some of its moments. Herethe level of detail and the involved physics are sacrificed in favour of computa-tional efficiency. The equations governing the time evolution of these moments usu-ally involve closure approximations whose impact on the results is unpredictable[20, 21]. Alternatively, macroscopic equations are carefully postulated, within a top-down approach, in order to guarantee the model objectivity and its thermodynamicaladmissibility.
In the case of dilute suspensions of short fibers, the three scales have beenextensively considered to model the associated systems without major difficulties.However, difficulties appear as soon as the concentration increases. In the semi-diluteand semi-concentrated regimes, fiber-fiber interactions occur, but in general they canbe accurately modeled by introducing a sort of randomizing diffusion term [22].There is a wide literature concerning dilute and semi-dilute suspensions, addressingmodeling [23–27], flows [28–32] and rheology [33, 34]. Thesemodels describe quitewell the experimental observations. When the concentration increases, rod interac-tions cannot be neglected anymore and appropriate models addressing these intenseinteractions must be considered, as for example the one proposed in [35]. Recentexperiments suggest that short fibers in concentrated suspensions align more slowlyas a function of strain than models based on Jeffery’s equation predict [36]. Foraddressing this issue Wang el al. [36] proposed the use of a strain reduction fac-tor, however this solution violates objectivity. Later, the same authors proposed anobjective model by decoupling the time evolution of both the eigenvalues and theeigenvectors of the second-order orientation tensor [37]. In [38] an anisotropic rotarydiffusion is proposed for accounting for the fiber-fiber interactions and the modelparameters were selected by matching the experimental steady-state orientation insimple shear flow and by requiring stable steady states and physically realizablesolutions.
The worst scenario concerns concentrated suspensions involving entangledclusters exhibiting aggregation/disaggregation mechanisms. A first approach in thatsensewas proposed in [39]. The first natural question is how to describe such systems.At the macroscopic scale, one could try to fit some power-law constitutive equation,however, this description does not hold for the microstructure. At the microscopicscale, direct numerical simulations describing complex fiber-fiber interactions canbe carried out in small enough representative volumes [40–42]. A natural candidateto be a reasonable compromise between (fine) micro and (fast) macro descriptionsconsists in considering again a kinetic theory description.
The main issue with such an approach lies in the fact that it must include twoscales, the one involving the aggregates and the one related to the rods compos-ing the aggregates. What are the appropriate conformational coordinates? How todetermine the time evolution of these conformational coordinates? How to representsimultaneously both scales, the one related to the aggregates and the other related tothe fibers? How to derive the interaction mechanisms?
In [43], the authors propose a first attempt to describe such clusters from a micro-mechanical model. Later in [44], the authors compared the model predictions withdirect numerical simulation in the case of rigid and deformable clusters. An enriched

46 2 Complex Flows of Micro/Nano Structured Fluids . . .
description taking into account the polidispersity of fibers constituting the clusterwithin a multi-scale framework was addressed in [45] in the case of rigid clusters.
In this chapter, we start by revisiting in Sect. 2.2 the multi-scale descriptionof dilute and semi-dilute suspensions of rigid rods, whose numerical solution isaddressed in Sect. 2.3. More concentrated regimes involving rod clustering are con-sidered in Sect. 2.4, and finally in Sect. 2.5 we consider some advanced topics relatedto work in progress.
Remark 1 In the present chapter we consider the following tensor products, whereEinstein’s summation convention is assumed:
• if a and b are first-order tensors, the single contraction “·” reads (a · b) = a j b j ;• if a and b are first-order tensors, the dyadic product “⊗” reads (a ⊗ b) jk = a j bk ;• ifa andb are first-order tensors, the cross product “×” reads (a×b) j = ε jmn am bn ,where ε jmn are the components of the Levi-Civita tensor ε (also known as permu-tation tensor);
• if a and b are respectively second and first-order tensors, the single contraction“·” reads (a · b) j = a jm bm ;
• if a and b are second-order tensors, the single contraction “·” reads (a · b) jk =a jm bmk ;
• if a and b are second-order tensors, the double contraction “:” reads (a : b) =a jk bk j .
• if a and b are third-order tensors then the triple contraction “∵” reads (a ∵ b) =a jkm bmkj ;
• if a and b are fourth-order tensors then the fourth contraction “::” reads (a :: b) =a jkmn bnmk j .
2.2 Dilute and Semi-dilute Suspensions
2.2.1 Multi-scale Description of Non-brownian RodSuspensions
We consider a suspending medium consisting of a Newtonian fluid of viscosityη in which there are suspended rigid and non-Brownian rods. We assume as firstapproximation that their presence and orientation do not affect the flow kinematicsthat is defined by the velocity field v(x, t), with x ∈ Ω ∈ R
d , d = 2, 3. The multi-scale modeling involves nine main conceptual bricks, the first three related to themicroscopic description (conformation, kinematics and dynamics), the next threerelated to the mesoscopic scale (conformation, kinematics and dynamics) and thelast three to the macroscopic description (conformation, kinematics and dynamics).We describe all of them in what follows.

2.2 Dilute and Semi-dilute Suspensions 47
2.2.1.1 Particle Conformation
The conformation of each rod R of length 2L can be described from its orientationgiven by the unit vector p located at the rod center of gravity G and aligned alongthe rod axis. Inertial effects are neglected in the sequel.
2.2.1.2 Particle Conformation Evolution
The orientation evolution of an ellipsoidal particle is described by Jeffery’s equation[1]. This equation can be derived in a very simple way illustrated in Fig. 2.1. Weconsider a system consisting of a rod and two beads located at both rod ends wherewe assume that hydrodynamic forces apply. We assume that the forces that apply oneach bead F depend on the difference of velocities between the fluid and the bead,the first one given by v0 + ∇v · pL and the second one by vG + pL . Thus, the forceF(pL) reads:
F(pL) = ξ(v0 + ∇v · pL − vG − pL), (2.2)
where ξ is the friction coefficient, v0 the fluid velocity at the rod center of gravity,and vG the velocity of the center of gravity.
If F applies on the bead at pL , then the force on the opposite bead at −pL reads
F(−pL) = ξ(v0 − ∇v · pL − vG + pL). (2.3)
Fig. 2.1 Hydrodynamic forces applied on a rod immersed in a Newtonian fluid

48 2 Complex Flows of Micro/Nano Structured Fluids . . .
By adding Eqs. (2.2) and (2.3), and neglecting inertial effects, we obtain the forcebalance
F(pL) + F(−pL) = 2ξ(v0 − vG) = 0, (2.4)
which implies v0 = vG , that is, the rod center of gravity is moving with the fluidvelocity. For simplicity of notation, we shall write F = F(pL) and F(−pL) = −F.
As the resulting torque must also vanish, the only possibility is that the force Facts along p, that is F = λp, with λ ∈ R. Thus, we can write
λp = ξ L(∇v · p − p). (2.5)
Premultiplying Eq. (2.5) by p and taking into account that p · p = 1 and conse-quently p · p = 0, we have
λ = ξ L (∇v : (p ⊗ p)) , (2.6)
which givesξ L (∇v : (p ⊗ p)) p = ξ L(∇v · p − p). (2.7)
We have thus obtained Jeffery’s equation
p = ∇v · p − (∇v : (p ⊗ p)) p. (2.8)
Remark 2 As the factor ξ L appears in both sides of Eq. (2.7), the rod kinematicsdoes not contain size effects.
2.2.1.3 Particle Contribution to the Stress
The forces applied at the rod ends pL and −pL are respectively λp and −λp, i.e.directed along the rod and in equilibrium by construction.
With λ given by Eq. (2.6), we have
F(pL) = ξ L(∇v : (p ⊗ p))p. (2.9)
By applying Kramers’ formula, the corresponding contribution to the stress isgiven by
τ p = pL ⊗ F = ξ L2(∇v : (p ⊗ p))p ⊗ p, (2.10)
which can be rewritten as
τ p = ξ L2 ∇v : (p ⊗ p ⊗ p ⊗ p). (2.11)

2.2 Dilute and Semi-dilute Suspensions 49
2.2.1.4 Population Description
There are two natural descriptions of a population ofN rods:
• The first one consists in specifying each rod orientation by considering the unitvector aligned along its axis, that is, by considering pi , i = 1, . . . ,N . As dis-cussed in the next section, the main drawback of this approach lies in the necessityof tracking the evolution of each “computational” rod by solving the correspond-ing Jeffery equation, and even if conceptually there is no major difficulty, thecomputing cost could be excessive in most practical applications.
• The second approach is the introduction of the PFD ψ(x, t, p) that gives thefraction of rods that a position x and time t are oriented along direction p.
Despite the fact that both mesoscopic models involve the same physics andrichness of description, the main advantage of the second one is the manipulation ofa scalar continuous function instead of the discrete description involved in the firstapproach. The price to be paid when using the description based on the use of thepdf is its inherent multidimensionality, because in that framework the pdf dependson the standard space and time coordinates and also on the conformation coordinatesthat the microstructural description involves, i.e. p in the present case.
2.2.1.5 Description of the Population Evolution
• When the population is described from the individuals describing it, whose con-formation is given by vectors pi , i = 1, . . . ,N , the evolution of each one is givenby Jeffery’s equation:
pi = ∇v · pi + (∇v : (pi ⊗ pi ))pi , ∀i = 1, . . . ,N . (2.12)
• The alternative description consists in using the pdf ψ(x, t, p) that satisfies thenormalisation condition:
∫S
ψ(x, t, p) dp = 1, ∀x, ∀t. (2.13)
withS the surface of the unit sphere, where vector p is defined.
Conservation of probability yields
∂ψ
∂t+ ∇x · (x ψ) + ∇p · (p ψ) = 0, (2.14)
where, for inertialess rods, x = v(x, t), and the rod rotary velocity is given byJeffery’s equation:
p = ∇v · p − (∇v : (p ⊗ p)) p. (2.15)

50 2 Complex Flows of Micro/Nano Structured Fluids . . .
The price to pay is the increase of the model dimensionality, as the orientationdistribution is defined in a 6-dimensional domain, i.e. ψ : (x, t, p) → R
+ wherex ∈ Ω ⊂ R
d , d = 3; t ∈ I ⊂ R+, p ∈ S .
2.2.1.6 Contribution of the Particle Population to the Stress
Again, we consider the two alternative descriptions:
• When the population is described in a discrete manner by means of the pi vectors,the contribution of rods to the suspension stress is calculated by adding theirindividual effects, that is:
τ(x, t) =N (x,t)∑
i=1
τ i =N (x,t)∑
i=1
ξ L2 ∇v : (pi ⊗ pi ⊗ pi ⊗ pi ), (2.16)
whereN (x, t) refers to the number of computational rods located at time t in theneighborhood of x.
• When the population is described from the pdf, the sum in Eq. (2.16) is replacedby an integral in the conformation space S :
τ(x, t) =∫S
τ p ψ(x, t, p) dp
= 2ηNp
∫S
∇v : (p ⊗ p ⊗ p ⊗ p) ψ(x, t, p) dp. (2.17)
Here, the particle number Np accounts for the particle concentration and the viscos-ity is used instead of the friction coefficient to be consistent with the usual notation.
In terms of the fourth-order orientation tensor
A =∫S
p ⊗ p ⊗ p ⊗ p ψ(x, t, p) dp, (2.18)
we obtain:τ = 2ηNp(A : ∇v), (2.19)
which in view of the symmetry of A can be rewritten as
τ = 2ηNp(A : D). (2.20)
2.2.1.7 Macroscopic Description
As just discussed, discrete descriptions are computationally expensive because ofthe large number of rods that must be considered in order to derive accurate-enough

2.2 Dilute and Semi-dilute Suspensions 51
model outputs. On the other hand, Fokker-Planck descriptions are rarely consideredin view of the curse of dimensionality that introduction of conformation coordinatesimplies. Thus, standard mesh-based discretization techniques, as finite differences,finite elements or finite volumes, fail when addressing models defined in high-dimensional spaces.
For these reasons,mesoscopicmodelswere coarsened to derivemacroscopicmod-els defined in standard physical domains, involving space and time. At the macro-scopic scale, the orientation distribution function is substituted by its moments fordescribing the microstructure [46]. Usually, macroscopic descriptions of rod suspen-sions are based on the use of the first two non-zero moments, i.e. the second and thefourth-order moments, a and A, defined by
a =∫S
p ⊗ p ψ(x, t, p) dp, (2.21)
and
A =∫S
p ⊗ p ⊗ p ⊗ p ψ(x, t, p) dp, (2.22)
respectively.
2.2.1.8 Microstructural Macroscopic Evolution
The microstructural evolution described at the macroscopic scale considers the timeevolution of the pdf moments. The time evolution of the second-order orientationtensor is given by:
a =∫S
(p ⊗ p + p ⊗ p) ψ dp
=∫S
(∇v · p − (∇v : (p ⊗ p)) p) ⊗ p ψ dp
+∫S
p ⊗ (∇v · p − (∇v : (p ⊗ p)) p) ψ dp
= ∇v · a + a · (∇v)T − 2 A : ∇v. (2.23)
This equation involves the fourth-order moment A. The time derivative of thefourth-order moment, using the same rationale, involves the sixth-order momentA ,and so on.
Thus, an approximate closure relation is needed inorder to express the fourth-ordermomentA as a function of the lower-ordermoment a. Different closure relations havebeen introduced and widely used [47–50]. With the quadratic closure relation (that isonly exact when all rods are locally aligned in the same direction), the fourth-ordermoment is approximated as follows:

52 2 Complex Flows of Micro/Nano Structured Fluids . . .
A ≈ a ⊗ a. (2.24)
This givesa ≈ ∇v · a + a · (∇v)T − 2 (∇v : a)a, (2.25)
and invoking again symmetry considerations,
a ≈ ∇v · a + a · (∇v)T − 2 (D : a)a. (2.26)
2.2.1.9 Moment-Based Stress
Weobtained previously the expression of the rod population contribution to the stress:
τ = 2ηNp(A : ∇v), (2.27)
which involves the fourth-order moment A. There is no closure issues when A iscalculated from the pdf ψ by using (2.22). When one proceeds at the macroscopicscale, however, wherein the pdf is not available, a closure relationmust be consideredfor either
• writing A from the knowledge of a, itself being calculated by integrating (2.23)with an appropriate closure relation (e.g. Eq. (2.25)when considering the quadraticclosure),
or
• calculating A by solving the equation that governs its time evolution in which, asjust commented, the sixth-order moment appears requiring again an appropriateclosure.
The first route is the simplest one and the most used in practice. It leads to
τ = 2ηNp(Acr (a) : ∇v), (2.28)
where the superscript “cr” refers to the use of an appropriate closure relation.With the quadratic closure, the stress reads:
τ = 2ηNp(a : ∇v)a ≡ 2ηNp(a : D)a. (2.29)
2.2.2 Multi-scale Description of Brownian Rods Suspensions
Until now Brownian effects were neglected as well as hydrodynamical interactionsbetween rods. The Brownian effects are due to the fluid’s molecular bombardmentacting on the beads. These effectswerewidely analyzed in [10, 51, 52]when focusingon a microscopic description.

2.2 Dilute and Semi-dilute Suspensions 53
2.2.2.1 Microscopic Description
In this case the road beads are subjected to the hydrodynamical forces and the onescoming from such bombardment. The first one was introduced previously
FH = ξ(∇v · pL − pL), (2.30)
where the superscript “H” refers to its hydrodynamic nature. Now the Brownianforce FB is assumed to apply during a short time interval δt following a certainstatistical distribution concerning its magnitude and its orientation. The first one isassumed described by a Gaussian distribution of zero mean and a certain standarddeviation and the one related to the orientation by a uniform distribution on the unitcircle (2D) or on the unit sphere (3D).
Brownian forces applying in the rod direction are assumed equilibrated. However,the components of those forces perpendicular to the rod axis contribute to the rodrotation, and then they affect the rod rotary velocity. In what follows, for the sake ofclarity, we restrict our analysis to the 2D case. Because the rod inertia is neglected,the resultant torque vanishes, implying:
FH · t + FB · t = 0, (2.31)
where t is the unit vector tangent to the unit circle. By introducing in this balancethe expression of the hydrodynamic force, we obtain
tT · ∇v · p − ‖p‖ = −FB · tξ L
, (2.32)
where the fact that p = ‖p‖t was taken into account. The previous equation can berewritten in the form:
p =(
tT · ∇v · p)
t + FB · tξ L
t, (2.33)
that, using the vectorial equivalence
(tT · ∇v · p
)t = ∇v · p − (
pT · ∇v · p)
p, (2.34)
results in
p = ∇v · p −(
pT · ∇v · p)
p + FB · tξ L
t
= ∇v · p −(
pT · ∇v · p)
p + FB − (FB · p)pξ L
, (2.35)

54 2 Complex Flows of Micro/Nano Structured Fluids . . .
where we can notice that the rotary velocity is given by the Jeffery expression pJ
complemented with a term describing the Brownian effects pB :
pJ = ∇v · p −(
pT · ∇v · p)
p, (2.36)
and
pB = FB − (FB · p)pξ L
, (2.37)
from whichp = pJ + pB . (2.38)
Finally, we should discuss the effects of such Brownian contribution to the extra-stress tensor.
Consider a rod aligned along the x-axis, such that pT = (1, 0) and the fluid atrest. This rod is subjected to a continuous bombardment from the solvent molecules(remember that the regime is dilute enough for neglecting the rod-rod interactions).The components of forces aligned with the rod axis do not participate to the rodrotation and by averaging on a time Δt � δt the contributions of the components ofthose forces along the rod direction vanish. On the contrary, the ones perpendicularto the rod will participate to the stress. To derive the expression of this Browniancontribution we consider that due to a Brownian force the rod rotates a small angleδθ > 0, with the rod orientation being defined by pδθ . Considering the Brownianforce applying at that position [51, 52], i.e. ‖FB‖ · tδΘ , we obtain the contributionto the virial stress given by:
− pδθ ⊗ ‖FB‖ tδθ = ‖FB‖(sin(δθ) · cos(δθ) − cos2(δθ)
sin2(δθ) − sin(δθ) · cos(δθ)
), (2.39)
where the negative sign accounts for the fact that the hydrodynamic force consideredin the virial stress applies in the opposite direction of the Brownian force.
We can notice in that expression two facts: (i) the trace is zero, and (ii) thecontribution is non-symmetric. However, we can imagine that in other rod, the sameBrownian force applies in the opposite direction, leading to an angle −δθ , fromwhich
p−δθ ⊗ ‖FB‖t−δθ = ‖FB‖(sin(δθ) · cos(δθ) cos2(δθ)
− sin2(δθ) − sin(δθ) · cos(δθ)
), (2.40)
and then, after averaging, we obtain a Brownian contribution to the extra-stress dueto rods aligned on the x-direction (i.e. ϕ = 0)
τ Bϕ=0 ≈
(β 00 −β
)= β
(1 00 −1
)= βU, (2.41)

2.2 Dilute and Semi-dilute Suspensions 55
that becomes almost symmetric and traceless. Here we considered a populationaverage, that, invoking ergodicity, is equivalent to averaging in Δt .
Now, for rods aligned in any other direction ϕ, it suffices to apply a rotation ofangle ϕ to tensor τ B
ϕ=0:
τ Bϕ = βRT
ϕ · U · Rϕ, (2.42)
with
Rϕ =(
cos(ϕ) sin(ϕ)
− sin(ϕ) cos(ϕ)
), (2.43)
that leads to:
τ Bϕ = 2β
((cos2(ϕ) sin(ϕ) · cos(ϕ)
sin(ϕ) · cos(ϕ) sin2(ϕ)
)−
( 12 00 1
2
)). (2.44)
This can be written as
τ Bp = 2β
(p ⊗ p − I
2
), (2.45)
where I is the identity tensor.For a population of rods pi , i = 1, . . . ,N , the contribution of Brownian effects
is finally:
τ B = 2βi=N∑i=1
(pi ⊗ pi − I
2
). (2.46)
2.2.2.2 Mesoscopic Description
At the mesoscopic scale, we postulate that Brownian effects try to randomize therod orientation distribution, i.e. a mechanism that can be modeled by assuming adiffusion term in the Fokker-Planck equation:
∂ψ
∂t+ ∇x · (vψ) + ∇p · (pψ) = ∇p · (
Dr∇pψ), (2.47)
with the flow-induced orientation term given by Jeffery’s equation:
p = ∇v · p −(
pT · ∇v · p)
p, (2.48)
where Dr is the rotary diffusion.We can notice that in absence of flow, i.e. v(x, t) = 0the Fokker-Planck equation reduces to
∂ψ
∂t= ∇p · (
Dr∇pψ), (2.49)

56 2 Complex Flows of Micro/Nano Structured Fluids . . .
which ensures a steady-state isotropic orientation distribution: ψ(x, t → ∞, p) =12π in 2D and ψ(x, t → ∞, p) = 1
4π in 3D. The higher is the rotational diffusionthe faster the isotropic orientation distribution in reached.
Thus, at the mesoscopic level, introduction of Brownian effects seems quite sim-ple. The question is what are the microscopic and macroscopic counterparts of thisdiffusion term?
The Fokker-Planck equation can be rewritten in the form:
∂ψ
∂t+ ∇x · (vψ) + ∇p · (pψ) − ∇p · (
Dr∇pψ)
(2.50)
= ∂ψ
∂t+ ∇x · (vψ) + ∇p ·
( ˙pψ)
= 0,
where the effective rotary velocity ˙p is given by
˙p = ∇v · p −(
pT · ∇v · p)
p − Dr∇pψ
ψ, (2.51)
which contains the flow-induced Jeffery contribution pJ plus the Brownian one pB ,i.e. ˙p = pJ + pB , with
pB = −Dr∇pψ
ψ. (2.52)
The Fokker-Planck multidimensionality issue was usually circumvented by usingstochastic strategies for solving the Ito equation related to its Fokker-Planck counter-part. It is important tomention that anyFokker-Planck equationhas an Ito counterpart,however the reciprocal is not true [53].
At the mesoscopic scale, the Brownian contribution to the extra-stress tensorresults from the generalization of Eq. (2.46):
τ B = 2γ Dr
∫S
(p ⊗ p − I
2
)ψ(p) dp = 2γ Dr
(a − I
2
). (2.53)
2.2.2.3 Macroscopic Description
Whenmoving towards themacroscopic scale, the Brownian contribution to the extra-stress is defined by Eq. (2.53). However, at the macroscopic scale the microstructureis defined by the differentmoments of the orientation distribution. Inwhat follows,wederive the contribution of Brownian effects to the equation governing the evolutionof the second-order moment.
We start from the definition of the second-order moment
a =∫S
p ⊗ p ψ dp, (2.54)

2.2 Dilute and Semi-dilute Suspensions 57
whose time derivative involves now the effective rotational velocity ˙p
a =∫S
( ˙p ⊗ p + p ⊗ ˙p)
ψ dp, (2.55)
or
a =∫S
((pJ + pB
)⊗ p + p ⊗
(pJ + pB
))ψ dp
=∫S
(pJ ⊗ p + p ⊗ pJ
)ψ dp
+∫S
(pB ⊗ p + p ⊗ pB
)ψ dp = aJ + aB, (2.56)
where, as proved before, the flow-induced microstructure evolution aJ is given by
aJ = ∇v · a + a · (∇v)T − 2A : D. (2.57)
We now calculate the expression of the remaining contribution aB :
aB =∫S
(pB ⊗ p + p ⊗ pB
)ψ dp, (2.58)
with pB given by
pB = −Dr∇pψ
ψ. (2.59)
For the sake of clarity, we consider again the 2D case for which
pB = −Dr
∂ψ∂θ
ψt, (2.60)
where t is the unit tangent vector to the unit circle. In this case, Eq. (2.58) reduces to
aB = −Dr
∫S
(t ⊗ p + p ⊗ t)∂ψ
∂θdθ. (2.61)
Now, integrating Eq. (2.61) by parts and taking into account
dpdθ
= t, (2.62)
anddtdθ
= −p, (2.63)

58 2 Complex Flows of Micro/Nano Structured Fluids . . .
we obtain:
aB = −2Dr
∫S
(p ⊗ p − t ⊗ t) ψ(θ) dθ. (2.64)
It is easy to prove that
t ⊗ t + p ⊗ p = I → t ⊗ t = I − p ⊗ p, (2.65)
that allows us to write Eq. (2.64) in the form
aB = −2Dr
∫S
(2p ⊗ p − I) ψ(θ) dθ = −2Dr (2a − I) , (2.66)
or
aB = −4Dr
(a − I
2
). (2.67)
We can notice that, in absence of flow, aJ = 0, and then a = aB ,
a = −4Dr
(a − I
2
), (2.68)
thus ensuring an isotropic steady state, i.e. a(t → ∞) = I2 in the 2D case.
Thus, the macroscopic orientation equation reads:
a = ∇v · a + a · (∇v)T − 2 · A : D − 2d Dr
(a − I
d
), (2.69)
where d is the space dimension: d = 2, 3.
2.2.3 Semi-concentrated Regime
Semi-dilute and semi-concentrated regimes have been widely addressed, most oftime by using phenomenological approaches. The most common approach consistsin considering that rod-rod interactions tend to randomize the orientation distribution.Thus, a second diffusion coefficient is introduced for accounting for rod interactions.However, in the present case, that diffusion coefficient should scale with the flowintensity in order to ensure that in absence of flow the microstructure does not evolveartificially because of such a diffusion term. In general, the interaction diffusioncoefficient DI is assumed of the general form
DI = CI · f (Deq), (2.70)

2.2 Dilute and Semi-dilute Suspensions 59
where Deq is related to the second invariant of the rate of strain tensor, i.e. Deq =√2D : D. The simplest choice consists in considering the dependence f (Deq) =
Deq [22].Obviously, there are finer approaches based on the direct simulation where the
rod-rod interactions are taken into account explicitly [40, 54]. A nice mesoscopicbasedmacroscopic approachwas proposed in [35] inwhich interactions are explicitlydescribed from the introduction of some interaction tensors that can be obtained fromthe orientation moments [55].
2.3 Processing Flow Simulation
The flow model for short fibers suspensions is defined by the following equations:
• The balance of linear momentum, without inertia and mass terms,
∇ · σ = 0, (2.71)
where σ is the stress tensor.• The incompressibility condition,
∇ · v = 0, (2.72)
where v is the velocity field.• The constitutive equation, with a quadratic closure relation for the fourth-orderorientation tensor,
σ = −pI + 2ηD + 2ηNp (a : D) a. (2.73)
The flow model is defined in the volume Ω f (t) occupied by the fluid at time t .On its boundary, Γ f (t) ≡ ∂Ω f (t), either the velocity or the traction is imposed:
v (x ∈ Γ1) = vg, (2.74)
andσ · n (x ∈ Γ2) = Fg, (2.75)
with Γ1 ∪ Γ2 = Γ f (t), Γ1 ∩ Γ2 = ∅, and where n(x) is the outward unit normal tothe domain boundary.
The inflow boundary will be denoted by Γ − :
Γ − = {x ∈ Γ1, v(x) · n(x) < 0}. (2.76)

60 2 Complex Flows of Micro/Nano Structured Fluids . . .
At the flow front Γ f f , Γ f f ⊂ Γ2, a null traction is usually prescribed, i.e. Fg(x ∈Γ f f ) = 0.
For calculating the orientation tensor involved in the constitutive equation, threeroutes are possible:
• Considering a population of computational particlespi whose position xi (t) resultsfrom the integration of
dxi (t)
dt= v(xi , t), (2.77)
and whose orientation pi (t) is obtained from the integration of the Jeffery equationor its Brownian counterpart.
• Solving the Fokker-Planck equation and then evaluating the integral defining theorientation tensor a.
• Integrating the equation governing the evolution a of the second-order orientationtensor a. Taking into account its hyperbolic character, this can be performed accu-rately by using the method of characteristics or a stabilized Eulerian integration.
2.3.1 Fixed Mesh Description of the Fluid DomainEvolution and Flow Front Tracking by Usinga Volume of Fluid—VoF—Technique
As just indicated, the flow model is defined in the part Ω f (t) of the whole domainΩ (of boundary Γ ) occupied by the fluid at each time t . In order to update the fluiddomain, we introduce the fluid presence function, I (x, t). This function takes a unitvalue in the fluid region and vanishes in the empty domain:
I (x, t) ={1 i f x ∈ Ω f (t)0 i f x ∈ Ωe(t)
, (2.78)
with the empty domain Ωe(t) = Ω − Ω f (t).The evolution of this function is given by the following scalar and linear advection
equation∂ I
∂t+ v · ∇ I = 0, (2.79)
which is defined in the whole domain. The fluid presence function must verify aboundary condition on Γ − (inflow boundary), which for simulating filling processesreads:
I (x ∈ Γ −, t) = 1, (2.80)
as well as an initial condition. If we assume the domain empty at the initial timet = 0, the initial condition is
I (x, t = 0) = 0. (2.81)

2.3 Processing Flow Simulation 61
The discretization of the equations of motion can be carried out by meansof a standard mixed finite element technique, using for example an enriched P1(P1 + “bubble”)C 0 approximation of the velocity field and a linear P1−C 0 approx-imation of the pressure field. This functional approximation verifies the inf-sup con-dition, also known as the LBB (Ladyzhenskaya-Babuska-Brezzi) condition. In orderto extend the variational formulation of the flow equations defined in Ω f (t) to thewhole domain Ω , we enforce a pseudo-behavior in the empty volume, defined byv = 0 and p = 0 [56]. Combining both the flow and the pseudo-behavior variationalformulations, we obtain:Find v ∈ (H1(Ω))3 and p ∈ L2(Ω) verifying the essential boundary conditionsv(x ∈ Γ −) = vg and v(x ∈ Γ − Γ −) = 0, such that
∫Ω
f (I ) σ : D∗dΩ +∫
Ω
αv (1 − f (I )) v · v∗dΩ = 0, (2.82)
∫Ω
f (I ) ∇ · v p∗dΩ +∫
Ω
αp (1 − f (I )) p p∗dΩ = 0, (2.83)
∀v∗ ∈ (H10 (Ω))3 and ∀p∗ ∈ L2(Ω), with f (I = 1) = 1 and f (I = 0) = 0 and
where the expression of the stress tensor is given by the constitutive equation (2.73).In this variational formulation, H1(Ω) and L2(Ω) denote the usual Sobolev and
Lebesgue functional spaces and H10 (Ω) is the functional space of velocities vanishing
on the domain boundary Γ . The choice of the functions f (I ), αv and αp is a keypoint for obtaining a numerical scheme without numerical dissipation and with alow diffusion of the flow front (required to locate accurately moving boundaries).The necessity of introducing functions αv and αp follows from the dimensionalconsistency requirements of Eqs. (2.82) and (2.83).
In [56] a linear combination of both variational formulations is considered, i.e.the fluid fraction was taken as weight function, i.e. f (I ) = I , and both parametersαv and αp were considered constant.
To justify the required values of both parameters, we considered in [29] an elementΩe which just starts its filling process. In this case the fluid fraction in this elementI e takes an intermediate value 0 < I e < 1. If parameters αv and αp are too high, theover-imposition of the zero velocity condition in the empty region or in the elementswhich start their filling process, tends to perturb the natural flow front movement. Onthe other hand, if those parameters are too small, the equation of motion as well as thefluid incompressibility will be over-imposed in the element Ωe in spite of the littleamount of fluid existing in this element which just starts its filling process. Thus, thispseudo-incompressibility, derived from the small values of both parameters, retardsthe filling process. In the same way, the resulting flow front thickness increases, andthe localization of the flow front remains uncertain. In order to improve the flowfront location (reducing its numerical thickness, i.e. the number of elements in theflow direction with a fluid fraction 0 < I < 1 ), it was proposed in [56] to use smallvalues of both parameters combined with a local mesh adaptation in the flow frontneighbourhood.

62 2 Complex Flows of Micro/Nano Structured Fluids . . .
Another choice able to reduce the flow front thickness was proposed in [29]:
f (I e) ={1 i f I e ≥ Ith0 i f I e < Ith
, (2.84)
where Ith represents a threshold value, close to one. The first advantage of thischoice is that no combinations of the fluid flow and the pseudo-behavior variationalformulations are employed in the partially filled elements. Thus, only in the case thatI e ≥ Ith the flow model will be enforced in the element Ωe. However, as provedbelow, a judicious choice of parameters αv and αp will be essential to enforce themass conservation reducing the flow front thickness to one element.
To illustrate the parameters choice, we consider a one-dimensional domain. Wedenote by Ωe a generic element where a linear approximation of the velocity field isconsidered. Thus, the velocity at each point of Ωe can be expressed from their nodalvalues ve and ve+1, where the coordinates of both nodes are xe and xe+1 (xe+1 > xe)respectively. We assume the inlet located at x = 0, where the injection velocity isenforced to a value vi . Now, let I e < Ith be the fluid fraction existing in the elementΩe at time t . Wewill assume that the element located upstream ofΩe ,Ωe−1, is fullyfilled, i.e. I e−1 = 1 and that the downstream element remains empty, i.e. I e+1 = 0.
At time t , with I e−1 = 1, the flow equations are imposed in the element Ωe−1.Thus, the velocity at node xe tends to be the injection velocity as a direct consequenceof the fluid incompressibility and the one-dimensional flow regime. On the otherhand, the node xe also belongs to the element Ωe where due to the fact that I e < Itha null velocity is enforced, implying the annulation of both nodal velocities. Anevident conflict appears because each element containing the node xe enforces adifferent value of the velocity at this node. Due to the continuity assumed in thevelocity interpolation the resulting velocity at this node will be an intermediate valuebetween the injection velocity (required by the flow equations) and a null velocity(enforced by the pseudo-behavior). Therefore, the extended variational formulationto the whole domain, as has been presented until now, affects the natural flow frontprogression. To avoid these undesired effects one possibility consists in an adequatechoice of parameters αv and αp. If we consider
αp(I e) = αv(I e) = α(I e) ={1 i f I e = 0ε i f I e > 0
, (2.85)
where ε is a constant small enough, the nodal velocity at node xe is dominated bythe flow equations enforced in the element Ωe−1 (the contribution of the pseudo-behaviour imposed in the element Ωe, and consequently affected by the constant ε
is negligible). Thus the velocity at node xe approaches the exact value (the injectionvelocity vi ). The velocity at node xe+1 will be null due to the imposition of thepseudo-behavior (null velocity) in all the elements containing this node. Thus, thefilling process of the element Ωe will be accurately achieved and the flow front areais reduced to a single element improving significantly the flow front location.

2.3 Processing Flow Simulation 63
Finally, we describe a first-order discontinuous finite element technique (higher-order discretization also exist) for solving the advection problems governing theevolution of fields I (x, t) and a(x, t).
In order to alleviate the notation we consider the linear and scalar advectionequation Eq. (2.79) governing the evolution of I (x, t).
Taking into account the fluid incompressibility, ∇ · v = 0, Eq. (2.79) can berewritten in the form
∂ I
∂t+ ∇ · (v I ) = 0, (2.86)
whose integral conservation form in element Ωe reads
∫Ωe
∂ I
∂tdΩ +
∫Ωe
∇ · (v I )dΩ = 0. (2.87)
Using the divergence theorem, the previous equation becomes
∫Ωe
∂ I
∂tdΩ +
∫∂Ωe
v · n I d S = 0, (2.88)
where ∂Ωe denotes the boundary of Ωe, and n is the outward unit normal to theelement boundary. The element boundary can be divided in two parts: ∂+Ωe throughwhich the flow leaves the element (i.e. the part of the boundary verifying the relationv · n > 0); and the inflow boundary ∂−Ωe, through which the fluid is coming toelement Ωe (verifying v · n < 0). Thus, the mass balance yields
∫Ωe
∂ I
∂tdΩ +
∫∂−Ωe
v · n I d S +∫
∂+Ωev · n I d S = 0. (2.89)
Wenowconsider the simplest approximation choice, consisting of a constant valueof function I (x, t) into each element. In this case function I (x, t) is not defined onthe element boundary, and the flow coming to element Ωe is approximated takinginto account its value in the upstream neigbouring elements Ωe−
i , I e−i . In the same
way, the outflow rate will depend on the fluid fraction existing in the elementΩe, I e.Thus, the previous equation can be written as
∂ I e
∂t|Ωe| =
∑i
qe−i I e−
i − qe+I e, (2.90)
where |Ωe| is the volume of Ωe, qe+represents the flow rate leaving the element
Ωe, and qe−i denotes the flow coming to element Ωe from the upstream neigbouring
element Ωe−i .
Considering the time derivative, the Taylor’s expansion of I e(t + Δt) reads

64 2 Complex Flows of Micro/Nano Structured Fluids . . .
I e(t + Δt) = I e(t) + ∂ I e
∂t
∣∣∣∣t
Δt + 1
2
∂2 I e
∂t2
∣∣∣∣t
(Δt)2 + · · · (2.91)
With a first-order explicit scheme, the update reads:
I e(t + Δt) = I e(t) + ∂ I e
∂t
∣∣∣∣t
Δt
= I e(t) +∑
i qe−i I e−
i − qe+I e
|Ωe| Δt. (2.92)
Figure2.2 depicts different stages of the filling process of a complex 3D cavity.It represents the field I (x, t) at 6 different filling times. In addition to the evolutionof the fluid domain Ω f (t), the velocity field and the orientation state was calculatedat each time step. The velocity field resulted from solving the weak form (2.82)and (2.83), whereas the orientation state was calculated by integrating the advectionEq. (2.69)
a = ∇v · a + a · (∇v)T − 2 · A : D − 6Dr
(a − I
3
), (2.93)
which, being purely advective, was integrated by applying exactly the same schemeas just described in the case of the fluid fraction I (x, t).
Fig. 2.2 Mould fillingsimulation: evolution of thepresence of fluid field

2.3 Processing Flow Simulation 65
2.3.2 Updated Lagrangian Meshless Simulation
Even if there are many variants of techniques operating on a fixed mesh, as the onejust presented, all of them give similar results despite theirs apparent differences.
Another possibility consists in solving the flow problem in the fluid domainΩ f (t)that must be updated at each time step. One could imagine that at time t a meshF t isassociated to the fluid domain Ω f (t). This mesh consists of a number of nodes Nn ,with coordinates xi (t), and a number of elements Ne. By solving the flow problemin Ω f (t) we have access to the velocity field at each node of the mesh, from which itcan be interpolated everywhere inΩ f (t). Now, one could imagine updating the nodalpositions with the material velocity, i.e. xi (t + Δt) ≈ xi (t) + v(xi (t), t) · Δt . It isimportant to mention that during this Lagrangian update, purely advective equations,as the one governing the evolution of the orientation tensor a, can be integratedaccurately by using the method of characteristics.
Now, a tentative mesh F t+Δt could be defined, for example from the Delaunaytriangulation related to the updated nodal positions xi (t + Δt). However, it is wellknown that such procedure entails the distortion of the elements involved in theupdated meshes and thus it compromises the solution accuracy. For this reason, aremeshing step is compulsory. Nodes are redistributed within the fluid domain toensure that the associated mesh F t+Δt does not contain elements that are too dis-torted.
Thus, standard updated Lagrangian approaches involve frequent remeshing steps.In addition to their computational complexity (mainly in 3D), they require a projec-tion of all the fields depending on the flow history (e.g. the orientation state) from thetrial mesh F t+Δt to the updated oneF t+Δt , with the associated numerical diffusion.
To alleviate these drawbacks, meshless methods were introduced some years agoand intensively used in many engineering applications. Meshless methods can bedefined as those discretization techniques able to construct field approximationswhose quality does not depend on the geometrical quality of a subjacent mesh.That is, when using meshless approximations, one could expect to define the fieldsapproximation at each time t from the nodal positions resulting of moving them withthe material velocity all along the whole simulation. They constitute an appealingchoice for simulating flows involving internal variables (e.g. orientation), becauseadvective fields are integrated very accurately by using the method of characteristicsand the description of free or moving boundaries is a trivial task [57].
The interested reader can refer to [58, 59] and the references therein. The maindifficulty of most meshless methods concerns the enforcement of essential boundaryconditions because most of them (the Natural Element Method being an exception)do not verify the Kroenecker’s delta property when approximating a field u(x) byuh(x), i.e. uh(xi ) �= u(xi ), with xi the coordinates of a generic node ni .
The Natural Element Method—NEM—is a nice compromise because it allowsfor a robust interpolation despite the quality of the subjacent mesh and it allows forthe enforcement of essential boundary condition like in the finite element method,among many other appealing properties [59].

66 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.3 Delaunay triangulation and Voronoi diagram
TheNEM is based on the application of two classes of Natural Neighbour interpo-lation (Sibson [60] andBelikov [61]) to the discretization of a variational formulation.In what follows, we will refer to the first one.
Sibson interpolation relies on the concepts ofDelaunay triangulations andDirichlettesselations of a set of nodes to build the shape functions (see Fig. 2.3). A Delaunaytriangulation (tetrahedrization in three-dimensions) is the unique triangulation for agiven set of nodes that satisfies the empty circumcircle criterion, that is, given thethree nodes of a triangle (four nodes on a tetrahedron) and the circle (sphere) thatpasses through them, no one of the other nodes lies inside this circle (sphere). AVoronoi diagram or a Dirichlet tessellation is the dual structure of a Delaunay trian-gulation. For a given node ni , the associated Voronoi cell is composed by all of thepoints which are closer to the node ni than to any other node. Formally,
Ti = {x ∈ R3 : d(x, xi ) < d(x, x j ) ∀ j �= i}, (2.94)
where Ti is the Voronoi cell and d(·, ·) represents the Euclidean distance. It is clearfrom Fig. 2.3 that the Delaunay triangulation is defined over the convex hull of theset of points.
In a similar way, the second-order Voronoi cell is defined as the locus of the pointsthat have the node ni as the closest node and the node n j as the second closest node:
Ti j = {x ∈ R3 : d(x, xi ) < d(x, x j ) < d(x, xk), ∀k �= i, j; i �= j}. (2.95)
Thus, if a new point is added to a given cloud of points, the natural neighbourcoordinates of this point x with respect to one of his neighbours xi is the ratio of thecell Ti that is transferred to Tx when adding x to the initial cloud of points, to thetotal area of Tx . In other words, with κ(x) and κi (x) being the Lebesgue measuresof Tx and Txi respectively, the natural neighbour coordinates of x with respect to thenode ni is defined as
φi (x) = κi (x)
κ(x), (2.96)

2.3 Processing Flow Simulation 67
which, using the notation indicated in Fig. 2.4, with A the polygon area, gives
φ1(x) = Aabf e
Aabcd. (2.97)
It is straightforward to prove that natural element shape functions define a partitionof unity. The resulting shape function is shown in Fig. 2.5.
Amodel variableu (u represents a scalar, a vector or a tensor) can be approximatedin 1D, 2D or 3D in the form:
uh(x) =Nn∑
i=1
φi (x)ui , (2.98)
with ui = u(xi ).
Fig. 2.4 Naturalneighbourhood coordinates
Fig. 2.5 Sibson’s shapefunction

68 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.6 NEM simulation of the flow leaving an extrusion die: orientation state (left) and velocityfield (right)
The main issue related to the use of these interpolants is the treatment of non-convex domains, since, as indicated before, the Delaunay triangulation proceeds onthe convex hull of the set of nodes. In that case, the simplest alternatives are theuse of alpha-shapes [62] or the construction of the functional approximation on theso-called Constrained Voronoi Diagram—CVD—[63].
NEM-based discretization techniques are particularly appropriate for simulatingvery large thermomechanical transformations exhibiting possible free and movingboundaries [57, 64], and in particular those involving flow dependent internal vari-ables, e.g. molecules conformation [65] or rod orientation [30, 66]. Figure2.6 depictsthe orientation and velocity fields in an extrusion simulation [31]. The orientationfield is represented by an ellipse at each nodal position, whose semi axes are pro-portional to the orientation tensor eigenvalues and their orientation are given by thecorresponding eigenvectors.
In this simulation, the nodal position is updated at each time step from thematerialvelocity. Then, the fluid domain is extracted by using the alpha-shape constructor[62]. Next, the flow Eqs. (2.71), (2.72) and (2.73) are solved in the just updated fluiddomain by using a Sibson approximation of the velocity field and considering thepressure field constant in each Voronoi cell. This approximation does not verify theLBB condition but generally works very well. It is much less expensive than usingapproximation fulfilling the LBB stability condition [67].
The solution of the flow problem at time t +Δt inΩ f (t +Δt) needs specifying theorientation state a(x ∈ Ω f (t +Δt), t +Δt) that appears in the constitutive equation(2.73). Because of the meshless character of the discretization here employed, wecan consider the cloud of nodes throughout the whole simulation. As we considerthe orientation state attached to the nodes, and the orientation equation being purelyadvective, one could proceed to its integration along the nodal pathlines by using themethod of characteristics, that is, proceeding from Eq. (2.69) in 2D:

2.3 Processing Flow Simulation 69
a = ∇v · a + a · (∇v)T − 2 · A : D − 4Dr
(a − I
2
). (2.99)
We consider for each node i = 1, . . . , Nn the simplest explicit first-order integration
a(xi (t + Δt), t + Δt) − a(xi (t), t)
Δt
= ∇v · a + a · (∇v)T − 2 · A : D − 4Dr
(a − I
2
), (2.100)
wherexi (t + Δt) = xi (t) + v(xi (t), t) · Δt, (2.101)
and in the right-hand side of Eq. (2.100), orientations and velocities are computed atpositions xi (t) and time t .
2.4 Concentrated Suspensions Involving Rod Clusters
Having considered rods immersed in a flow, we extend the approach to more com-plex configurations. Suspensions of industrial interest composed of rods (a limitcase of an ellipsoid) aggregate, leading to clusters with particular shapes thatexhibit, when immersed in a flow, an almost rigid motion. These situations arecurrently encountered when considering carbon nanotubes suspensions as discussedin [33, 39, 68]. Inwhat follows,we address themodeling of both rigid and deformableclusters.
2.4.1 Rigid Clusters
We represent rigid clusters of general shape in both a discrete manner, assuming theyare all composed of N/2 rods (N being an even integer) involving N beads, and in acontinuous manner from the continuous pdf describing the configuration of those rodbeads. In a rigid cluster, there is no relative motion between the rods composing it.
2.4.1.1 Discrete Description
First, we consider a 3D rigid cluster consisting of N/2 rods R j of length 2L j . Weassume that each rod R j contains two beads at its ends on which hydrodynamicforces apply. Thus, the cluster contains N beads Bi , i = 1, . . . , N . The location ofeach bead Bi with respect to the cluster center of gravity G is represented by Si qi ,where qi is the unit vector pointing from G toBi . The cluster is sketched in Fig. 2.7.

70 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.7 Rigid clustercomposed of rods
Brownian effects are neglected and then only flow-induced hydrodynamic forcesmust be considered (hydrodynamic interactions are not considered in this work).Forces Fi apply on each bead located at position Si qi (Fig. 2.7) and are proportionalto the difference of velocity between the one of the flow unperturbed by the presenceof the cluster at the bead location and the one of the bead itself:
Fi = ξ (V0 + ∇v · qi Si − VG − qi Si ), (2.102)
where ξ is the friction coefficient, v the flow velocity field, V0 the fluid velocity atthe cluster centre of gravity G and VG the velocity of the cluster center of gravityitself.
By adding all the forces we obtain
0 =i=N∑i=1
Fi = N (V0 − VG) + ∇v ·(
i=N∑i=1
Si qi
)−
(i=N∑i=1
Si qi
). (2.103)
Both sums in Eq. (2.103) vanish, the first one as a direct consequence of thedefinition of the center of gravity, and the second because the cluster is assumedrigid. Thus, Eq. (2.103) becomes
V0 = VG, (2.104)
implying that the cluster center of gravity is moving with the fluid velocity at thatposition.
The torque created by forces applied on bead Bi is given by
Mi = Si qi × Fi . (2.105)
Neglecting inertial effects, the resulting torque for the whole cluster must vanish:

2.4 Concentrated Suspensions Involving Rod Clusters 71
i=N∑i=1
Mi = 0. (2.106)
Taking Eqs. (2.105) and (2.102) into account, we have
i=N∑i=1
S2i qi × (∇v · qi ) =
i=N∑i=1
S2i qi × qi . (2.107)
If we define the cluster angular velocity ω such that
qi = ω × qi , (2.108)
torque equilibrium reads
i=N∑i=1
S2i qi × (∇v · qi ) =
i=N∑i=1
S2i qi × (ω × qi ). (2.109)
Now, by using the vector triple product relationship a × (b × c) = b (a · c) −c (a · b), the right-hand side reads
i=N∑i=1
S2i qi × (ω × qi ) =
i=N∑i=1
S2i (ω (qi · qi ) − qi (qi · ω)) , (2.110)
which, taking into account the normality of vectors qi and the fact that qi (qi · ω) =(qi ⊗ qi ) · ω, becomes
i=N∑i=1
S2i qi × (ω × qi ) =
i=N∑i=1
S2i (I − (qi ⊗ qi )) · ω, (2.111)
where I the unit matrix.Now, the left-hand side of Eq. (2.109) can be rewritten by using the third-order
Levi-Civita permutation tensor ε such that (u × v) = ε : (v ⊗ u). We obtain
i=N∑i=1
S2i qi × (∇v · qi ) =
i=N∑i=1
S2i ε : (∇v · (qi ⊗ qi )) , (2.112)
which finally yields
i=N∑i=1
S2i ε : (∇v · (qi ⊗ qi )) =
i=N∑i=1
S2i (I − (qi ⊗ qi )) · ω. (2.113)

72 2 Complex Flows of Micro/Nano Structured Fluids . . .
Expressed in a more compact form, we have
ε :(
∇v ·(
i=N∑i=1
S2i (qi ⊗ qi )
))
=((
i=N∑i=1
S2i
)I −
(i=N∑i=1
S2i (qi ⊗ qi )
))· ω. (2.114)
2.4.1.2 Continuous Description
The continuous description considers the pdfΥ (q, S) giving the fraction of rod beadslocated at position qS, that can be expressed as
Υ (q, S) = ψ(q; S) Γ (S), (2.115)
where ψ(q; S) is the angular distribution of beads located at distance S from thecluster center of gravity G, and Γ (S) is the fraction of beads located at that distanceS. The normality condition reads
∫S
ψ(q; S) dq = 1, ∀S. (2.116)
By defining the conformation tensor cS related to the population of beads locatedat distance S with respect to the cluster center of gravity G as
cS =∫S
q ⊗ q ψ(q; S) dq, (2.117)
all sums in the previous expression (2.114) must be substituted by the correspondingintegrals in the length and orientation domains,L andS respectively, weighted bythe distribution function ψ(q; S) Γ (S).
In particular Eq. (2.114) becomes:
ε :(
∇v ·(∫
LS2
(∫S
(q ⊗ q)ψ(q; S) dq)
Γ (S) d S
))
=((∫
LS2 Γ (S) d S
)I −
(∫L
S2(∫
S(q ⊗ q)ψ(q; S) dq
)Γ (S) d S
))· ω,
(2.118)
which gives, using definition (2.117),
ε :(
∇v ·(∫
LS2 cS Γ (S) d S
))
=((∫
LS2 Γ (S) d S
)I −
(∫L
S2 cS Γ (S) d S
))· ω. (2.119)

2.4 Concentrated Suspensions Involving Rod Clusters 73
By introducing the mean square length β and tensor c according to
β =∫L
S2 Γ (S) d S, (2.120)
and
c =∫L
S2 cS Γ (S) d S, (2.121)
and due to the unit trace of cS , i.e. T r(cS) = 1, we can infer that β is in fact the traceof c, that is β = T r(c).
Thus, the particle kinematics finally results:
ε : (∇v · c) = (T r(c)I − c) · ω, (2.122)
or dividing by T r(c),ω = (I − c)−1 · (ε : (∇v · c)) , (2.123)
where the conformation tensor c is given by
c = cT r(c)
. (2.124)
Remark 3 In the 2D case, c · ω = 0 and then ω = (ε : (∇v · c)). Moreover, if allbeads are located at the same distance S, we recover the expression given in [44].
An extremely important consequence of this analysis is that rigid clusters com-posed of rods having the same conformation tensor c rotate at the same angularvelocity.
As the conformation tensor c is symmetric and positive definite, it has real eigen-values and eigenvectors. In 3D, the three mutually perpendicular eigenvectors will bedenoted by u1, u2 and u3, with the associated eigenvalues τ1, τ2 and τ3 respectively.
Imagine a rigid cluster composed of three rods oriented in directions u1, u2 andu3 with respective lengths
√τ1,
√τ2 and
√τ3. The conformation tensor of such a
three-rod cluster coincides with c and then both tensors have the same rotary velocity.Thus in [45] we proved the link between a rigid cluster compose of three mutuallyorthogonal rods and the Jeffery triaxial-ellipsoid.
2.4.1.3 Multi-scale Description
In this chapter, we have only addressed the first brick of the proposed approach tothe multi-scale modeling of suspensions involving rigid clusters composed of rigidrods. In way of perspectives for future work, we conclude with an overview of thecomplete nine-step approach to be followed:

74 2 Complex Flows of Micro/Nano Structured Fluids . . .
1. The cluster conformation has been successfully described by tensor c given inEq. (2.124). This choice was motivated by the fact that all clusters having thesame conformation tensor c have the same kinematics as just proved.
2. Cluster conformation evolution. Knowing the cluster kinematicsω, we can obtainthe expression of q in order to define the conformation evolution from c.
3. Cluster contribution to the stress. The force acting on each rod bead involved inthe rigid cluster must be taken into account by invoking Kramers’ rule.
4. Population description. The population of rigid clusters at the mesoscopic scalecan be represented by means of either a discrete or a continuous description. Inthe discrete framework, the population is described from different computationalindividuals, each one characterized by its conformation tensor ci , i = 1, . . . ,N .Within the continuous framework, the suspension is characterized by the pdf Ψ ,which now depends on the physical coordinates (space x and time t) and theconformation coordinate c. Thus, the pdf reads Ψ (x, t, c). It gives the fraction ofclusters that at position x and time t have a conformation given by c.
5. Description of the population evolution.Within the discrete framework, the popu-lation evolution is obtained by integrating the evolution equation for each clusterconformation ci . Within the continuous framework, the pdf Ψ (x, t, c) evolvesaccording to its associated Fokker-Planck equation, with the knowledge of c.
6. Contribution of cluster population to the stress requires adding the contributionof all computational clusters, within the discrete framework, or to integrate inconformation space when proceeding within the continuous framework.
7. The macroscopic description uses a coarser description based on the moments ofthe pdf. Here, the simplest choice consists of the first moment C(x, t) defined as
C(x, t) =∫C
c Ψ (x, t, c) dc. (2.125)
8. Microstructural macroscopic evolution. In order to derive the time evolution ofthe first moment C, we should consider its time derivative and propose adequateclosure relations.
9. Themoment-based stress requires consideration of the stress expression obtainedin step (6) above.Here again, introduction of a suitable closure relation is required.
2.4.2 Deformable Clusters
In this section, we consider a more realistic scenario consisting of deformable clus-ters. We consider two types of forces applied on each bead of a generic rod R (oflength 2L), one due to the fluid-rod friction once more modeled fas
FHi = ξ (vi
0 + ∇v · pi L − viG − pi L), (2.126)

2.4 Concentrated Suspensions Involving Rod Clusters 75
where the superscript “H” refers to its hydrodynamic nature. Here, vi0 is the fluid
velocity (assumed unperturbed by the presence of the cluster) at the rod Ri centreof gravity Gi , and vi
G the velocity of the rod Ri centre of gravity Gi .The other force FC
i is due to the rod entanglements. This last force is assumedscaling with the difference between the rigid motion velocity (the one that the beadwould have if the cluster would be rigid) vR
B and the real one vG + pL .As proved in the previous section, the bead velocity when assuming the cluster
rigid reads:vRB = V0 + W · r + W · pL , (2.127)
where tensor W derives from the rigid rotary velocity ω given by Eq. (2.123) from
W · p = ω × p, ∀p. (2.128)
V0 is the unperturbed fluid velocity at the cluster centre of gravity G and r is thevector connecting the cluster centre of gravity G to the rod centre of gravity G , i.e.r = G − G.
Thus, the contribution to the bead force due to collective effects (a sort of meanfield) when considering the generic rod Ri reads:
FCi = μ (V0 + W · ri + W · pi L − vi
G − pi L). (2.129)
This expresses that if the hypothetical rigid cluster is moving faster that the beadthen this sort of mean field pushes the bead.
When μ is large enough, forces FCi dominate the momentum balances enforcing
the cluster rotary velocity W to each rod composing it (rigid behaviour).The resulting force at bead pi L results Fi (pi L) = FH
i (pi L) + FCi (pi L). The
linear momentum balance, neglecting inertia effects, reads
Fi (pi L) + Fi (−pi L) = 0, (2.130)
that impliesξvi
0 − ξviG + μV0 + μW · ri − μvi
G = 0, (2.131)
or
viG = ξvi
0 + μV0
ξ + μ+ μ
ξ + μW · ri . (2.132)
When μ = 0, this gives the standard non-interacting rod model (dilute suspension),with vi
0 = viG , and when ξ = 0, we recover the solid motion vi
G = V0 + W · ri .Now, taking into account the first gradient framework
vi0 = V0 + ∇v · ri , (2.133)

76 2 Complex Flows of Micro/Nano Structured Fluids . . .
Eq. (2.132) reduces to:
viG = V0 + ξ
ξ + μ∇v · ri + μ
ξ + μW · ri . (2.134)
This equation allows for the trajectory calculation of each rod centre of gravity.Now, we consider the equation governing the evolution of the rods orientations, thatis p.
Coming back to the force applied on each rod bead,
Fi = ξ (vi0 + ∇v · pi L − vi
G − pi L)
+ μ (V0 + W · ri + W · pi L − viG − pi L), (2.135)
and taking (2.131) into account, we obtain
Fi (pi L) = L (ξ(∇v · pi − pi ) + μ(W · pi − pi )) . (2.136)
Now, if we define the equivalent traceless gradient G,
G = μ W + ξ ∇vξ + μ
, (2.137)
Eq. (2.136) can be rewritten as
Fi (pi L) = L(ξ + μ) (G · pi − pi ) , (2.138)
that allows for using all the rationale considered when developing the Jeffery model,by replacing the friction coefficient by (ξ + μ) and the gradient of velocity by G.
Thus, the rod rotary velocity becomes:
pi = G · pi − (G : (pi ⊗ pi )) pi . (2.139)
The term G : (pi ⊗ pi ) deserves some additional comment. Since W and Ω areboth skew-symmetric, we obtain: W : (pi ⊗ pi ) = 0, and the same in the case ofconsidering Ω , implying G : (pi ⊗ pi ) = ξ
ξ+μD : (pi ⊗ pi ) and then:
pi = G · pi − ξ
ξ + μ(D : (pi ⊗ pi )) pi (2.140)
This can be rewritten as
pi = μ
ξ + μW · pi + ξ
ξ + μ∇v · pi − ξ
ξ + μ(D : (pi ⊗ pi )) pi
= ξ
ξ + μpJ
i + μ
ξ + μW · pi = ξ
ξ + μpJ
i + μ
ξ + μpR
i , (2.141)

2.4 Concentrated Suspensions Involving Rod Clusters 77
where pJi represents the hydrodynamic contribution in absence of collective effects
(dilute regime described by the Jeffery equation), and pRi the one coming from the
rod entanglements that results in a rigid-like cluster kinematics.We can notice that, when ξ � μ, hydrodynamic effects are preponderant and the
rod kinematics are governed by the Jeffery equation, i.e. pi ≈ pJi . In the opposite
case, μ � ξ , the cluster is too rigid and the rods adopt the velocity dictated by therigid cluster kinematics pi ≈ pR
i .
Macroscopic description: cluster inertia and shapeFrom Eq. (2.134), the position of each rod composing the cluster can be integrated.It seems natural that knowing the location of the centre of gravity of each rod, thecluster inertia and shape could be obtained.
If we define the cluster inertia tensor S from:
S =∫R
r ⊗ r ψ(r) dr, (2.142)
its time evolution is given by
S =∫R
(r ⊗ r + r ⊗ r) ψ(r) dr, (2.143)
with r = vG − V0, where the fact that the (rigid) cluster centre of gravity is movingwith the fluid velocity at that position was taken into account. Thus, we obtain
r = ξ
ξ + μ∇v · r + μ
ξ + μW · r. (2.144)
Now, by introducing Eqs. (2.144) into (2.143) and making use of (2.142), weobtain
S = ξ
ξ + μ
(∇v · S + S · (∇v)T
)+ μ
ξ + μ(W · S − S · W) , (2.145)
where we used the fact that WT = −W. The vorticity tensor appearing in both ∇vand W ensures the objectivity of the cluster shape evolution.
In Eq. (2.145), the first term involving the velocity gradient ∇v is responsible ofthe cluster deformation, whereas the second one involving W only rotates the clusterlike a rigid solid because of collective effects. The standard flow-induced rotation(in absence of collective effects) is contained in the vorticity tensor. When μ = 0,the cluster deforms and rotates according to the flow vorticity. When μ �= 0, thereis an extra-rotation induced by collective effects. Finally, when ξ = 0 (μ �= 0), thecluster rotates without experiencing a deformation.
The trace of S gives information on the cluster size. Let us define the shape tensors from the normalized inertia tensor

78 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.8 Cluster shapes
s = ST r(S)
. (2.146)
The shape tensor being symmetric and positive definite, it can be diagonalizedand represented by an ellipsoid (ellipse in 2D) whose eigenvalues describe the clusterorientation and its eigenvalues its shape. Figure2.8 depicts different clusters and theirassociated shape tensors.
Macroscopic description: orientationNow, concerning the orientation, if we assume the orientation of the rods of adeformable cluster given by the orientation distribution ψ(p), the time derivativeof its second order moment a is given by
a =∫S
(p ⊗ p + p ⊗ p) ψ(p) dp. (2.147)
By considering the expression of the microscopic velocity p,
p = ξ
ξ + μpJ + μ
ξ + μpR, (2.148)
we obtain:
a = ξ
ξ + μaJ + μ
ξ + μaR, (2.149)
with aJ and aR resulting once Eq. (2.148) is introduced into Eq. (2.147) by assumingμ = 0 and ξ = 0, respectively:
{aJ = ∇v · a + a · (∇v)T − 2 A : DaR = W · a + a · WT (2.150)
Here, A is the fourth-order moment defined by:
A =∫S
p ⊗ p ⊗ p ⊗ p ψ(p) dp. (2.151)

2.4 Concentrated Suspensions Involving Rod Clusters 79
The objectivity of the resulting evolution equation of awasproved in [43].Usually,the fourth-order moment A is expressed from the second-order one by consideringany of the numerous closure relations proposed in the literature [47–50].
We just proved that the conformation of a deformable cluster is defined fromboth the orientation tensor a and the shape tensor S. The evolution of both tensorsmakes use of tensor W that depends itself on the conformation tensor c. Tensor c isvery close to tensor S; the first is defined from the vectors joining the cluster centreof gravity with each rod bead, whereas the second one involves vectors joining thecluster centre of gravity with the rods centre of gravity. The rod length being verysmall, both tensors are very close, and consequently tensor W can be evaluated byusing S instead of c.
To validate this approach, we come back to the definition of the conformationtensor c (2.124),
c = cT r(c)
, (2.152)
where the discrete form of c reads
c =N∑
i=1
(Si qi ) ⊗ (Si qi ). (2.153)
If we consider the contribution of the two beads of a generic rod R j , we obtain
c j = (S j1q j
1) ⊗ (S j1q j
1) + (S j2q j
2) ⊗ (S j2q j
2)
= (r j + Lp j ) ⊗ (r j + Lp j ) + (r j − Lp j ) ⊗ (r j − Lp j )
= 2r j ⊗ r j + 2L2p j ⊗ p j , (2.154)
which implies
c =N2∑
j=1
c j =N2∑
j=1
(2r j ⊗ r j + 2L2p j ⊗ p j
)= 2
(S + L2a
), (2.155)
from which we obtain conformation tensor
c = S + L2aT r(S) + L2 . (2.156)
Thus, as soon as L2 � T r(S), we can assume c ≈ S.
Cluster shape versus orientationIn themodel just proposed, the cluster conformation is described from the orientationand shape tensors and the trace of the inertia tensor. In principle, orientation andshape are considered independent from one another, even if some correlation could

80 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.9 Cluster shapes versus orientation: rods fully aligned
Fig. 2.10 Cluster shapes versus orientation: isotropic orientation
be expected froma physical point of view. Thus,we can define a spherical clusterwithall its rods aligned or a very elongated cluster with all its rods isotropically oriented.Figures2.9 and 2.10 depict different scenarios between these two limit cases.
2.5 Advanced Topics
2.5.1 On the Solution of the Fokker-Plank Equation
Since kinetic theory descriptions involve a probability distribution function depend-ing on space, time and a number of conformational coordinates, the associatedFokker-Planck equations suffer the so-called curse of dimensionality typical of prob-lems defined in highly dimensional spaces.

2.5 Advanced Topics 81
Thus, mesh-based discretization techniques fail for discretizing the problembecause the number of degrees of freedom involved in a mesh or grid increasesexponentially with the space dimension.
In what follows, we consider some alternatives to standardmesh-based discretiza-tion that are able to address the solution of Fokker-Planck equations associated withkinetic theory descriptions.
We consider, without loss of generality, a generic Fokker-Planck equation wherediffusion terms are represented by fluxes qx and qa operating respectively in thephysical and conformational spaces:
∂Ψ
∂t+ ∇x · (v Ψ ) + ∇a · (a Ψ ) = −∇x · qx − ∇a · qa . (2.157)
2.5.1.1 Method of Particles for Solving Advection-Dominated Problems
This technique described in detail in [6, 8] consists in approximating the initial distri-bution Ψ (x, t = 0, a) fromM Dirac’s masses a0i at each one of theQ positions x0j :
Ψ (x, t = 0, a) =Q∑
j=1
M∑i=1
αji δ(a − a0i ) δ(x − x0j ). (2.158)
This represents a sort of approximation based onQ ·M computational particlesPi j
with initial positions and conformations given by
{x0i j = x0j , i = 1, . . . ,M ; j = 1, . . . ,Qa0i j = a0i , i = 1, . . . ,M ; j = 1, . . . ,Q
, (2.159)
and whose position and conformation will be evaluated all along the flow simulation,from which the distribution will be reconstructed.
When considering the purely advective balance equation
∂Ψ
∂t+ ∇x · (v Ψ ) + ∇a · (a Ψ ) = 0, (2.160)
the time evolution of position and conformation of each particle Pi j is calculatedby integrating {
xi j (t) = x0i j + ∫ τ=tτ=0 v(xi j (τ )) dτ
ai j (t) = a0i j + ∫ τ=tτ=0 ai j (ai j (τ ), xi j (τ )) dτ
. (2.161)
As the position update only depends on the velocity field, that itself only dependson the position, it can be stressed that particles Pi j , i = 1, . . . ,M are followingthe same trajectory in the physical space, having x0j as departure point.

82 2 Complex Flows of Micro/Nano Structured Fluids . . .
Now, the orientation distribution at time t can be reconstructed from
Ψ (x, t, a) =Q∑
j=1
M∑i=1
αji δ(a − ai j (t)) δ(x − xi j (t)). (2.162)
Obviously, smoother representations can be obtained by considering appropriateregularizations of the Dirac’s distribution, as the one usually performed within theSPH (Smooth Particles Hydrodynamics) framework [5, 6].
When considering diffusion terms, there are two main routes based on the use ofparticles, one of stochastic nature, the other fully deterministic.
For illustrating the procedure when models involve diffusion terms, we considerthe Fokker-Planck equation
∂Ψ
∂t+ ∇x · (v Ψ ) + ∇a · (a Ψ ) = −∇x · qx − ∇a · qa, (2.163)
whereqx andqa are two diffusive fluxes operating in the physical and conformationalspaces respectively, both modeled from a Fick-type law:
{qx = −Dx · ∇xΨ
qa = −Da · ∇aΨ. (2.164)
• Within the stochastic framework, diffusion terms can be modeled from appro-priate random variables within a Lagrangian or a Eulerian description, the lastone known as Brownian Configurations Fields (BCF). Both approaches were con-sidered in our former works on the solution of Fokker-Planck equations [8, 69].Within the Lagrangian stochastic framework and starting from the initial cloud ofcomputational particles Pi j representing the initial distribution Ψ (x, t = 0, a),the simplest particles updating reads
{xi j (tn+1) = xi j (tn) + v(xi j (tn)) Δt + Rx (Δt)ai j (tn+1) = ai j (tn) + ai j (ai j (tn), xi j (tn)) Δt + Ra(Δt)
, (2.165)
where Δt is the time step and both random updates Rx and Ra depend on thechosen time step (see [53] for more details as well as for advanced stochasticintegrations).Obviously, because of the random effects operating in the physical space, the Mparticles initially located at each position x0j , j = 1, . . . ,Q, will follow differenttrajectories in the physical space along the simulation. In order to obtain accurateenough results, we must consider a rich enough representation, that is, a largepopulation of particles. For this purpose, wemust consider large enoughM andQ.The large number of particles to be tracked seems a disadvantage of the approach atfirst sight, but it must be noticed that the integration of each particle is completely

2.5 Advanced Topics 83
independent of all the others, making possible the use ofHPConmassively parallelcomputing platforms.
• The technique introduced for treating purely advective equations can be extendedfor considering diffusion contributions as was described in [5] and that we revisitin what follows, within a fully deterministic approach. Eq. (2.163) can be rewrittenas:
∂Ψ
∂t+ ∇x ·
((v + qx
Ψ
)Ψ
)+ ∇a ·
(((a + qa
Ψ
)Ψ
)= 0, (2.166)
or∂Ψ
∂t+ ∇x · (v Ψ ) + ∇a ·
( ˙a Ψ)
= 0, (2.167)
where the effective velocities v and ˙a are given by:
{v = v − 1
ΨDx · ∇xΨ˙a = a − 1
ΨDa · ∇aΨ
. (2.168)
Now, the integration scheme (2.161) can be applied by replacing material andconformation velocities, v and a, by their effective counterparts v and ˙a:
{xi j (t) = x0i j + ∫ τ=t
τ=0 v(xi j (τ )) dτ
ai j (t) = a0i j + ∫ τ=tτ=0
˙ai j (ai j (τ ), xi j (τ )) dτ. (2.169)
This fully deterministic particle description requires much less particles that itsstochastic counterpart, but as noticed in Eq. (2.168), the calculation of the effec-tive material and conformational velocities requires the derivative of the pdf Ψ
with respect to both the physical and the conformational coordinates. To do so,the distribution must be reconstructed all along the simulation (at each time step),which constitutes a serious drawback for its implementation on massively parallelcomputing platforms. Moreover, to make possible the calculation of the distribu-tion derivatives, the Dirac distribution must be regularized in order to ensure itsderivability.
2.5.1.2 Separated Representations for Solving Difusion-DominatedProblems
When the diffusion effects are dominant, the techniques presented in the previoussection become inefficient because they require an excessive number of particles toproduce accurate enough results, in particular for reconstructing the distribution. Inthis case, standard mesh-based discretizations seem a better choice. However, as dis-cussed before, mesh-based discretizations fail when addressing highly dimensionalmodels as it is the case when addressing the solution of the previous introducedFokker-Planck equation. Separated representations seem the most appealing choice.

84 2 Complex Flows of Micro/Nano Structured Fluids . . .
Considering the Fokker-Planck equation
∂Ψ
∂t+ ∇x · (v Ψ ) + ∇a · (a Ψ )
= ∇x (Dx · ∇xΨ ) + ∇a (Da · ∇aΨ ) , (2.170)
there are many separated representation choices. The most natural one consists inseparating time, physical and conformational spaces, i.e.
Ψ (x, t, a) ≈N∑
i=1
Xi (x) · Ti (t) · Ai (a). (2.171)
Thus, when proceeding with the Proper Generalized Decomposition—PGD—constructor [43], we must solve of the order of N 2D or 3D (depending on thedimension of the physical space) boundary value problems—BVP—for calculatingfunctions Xi (x), the same number of 1D initial value problems—IVP—for calcu-lating functions Ti (t), and finally the same number of 2D or 5D (the number ofcomponents of tensor a in the 2D or 3D case, where the symmetry and its unit tracehas been taking into account) BVP for calculating functions Ai (a). A discussionof the difficulties related to the solution of the former multidimensional problemsinvolving the conformational coordinates was addressed in [44].
2.5.2 Descriptions Based on Higher-Order Kinematics
The models proposed until now consider a first-order kinematics, that is, a constantvelocity gradient at the particle scale. However, when the kinematics become richenough or the particle size becomes large with respect to the characteristic flowdimension, first-order modeling must be enriched. In what follows, we address itsextension to second and third-gradient flow kinematics.
2.5.2.1 Second-Gradient Description with Concentrated Forcesat the Rod Beads
We now consider a rod R but with a higher-order description of the fluid velocityfield at the rod scale. Again, forces applied on each bead F depend on the differenceof velocities between the fluid and the bead, the first one now including the second-order velocity gradient H according to v(pL) = v0 + ∇v · pL + (H : (p ⊗ p)) L2
and the second one given by vG + pL . Thus, the force F(pL) reads:
F(pL) = ξ (v0 + ∇v · pL + (H : (p ⊗ p)) L2 − vG − pL), (2.172)
where the third-order tensor H is defined by Hi jk = 12
∂2vi∂x j ∂xk
.

2.5 Advanced Topics 85
Obviously, ifF applies on the beadpL , then at the opposite bead−pL the resultingforce reads
F(−pL) = ξ (v0 − ∇v · pL + (H : (p ⊗ p)) L2 − vG + pL). (2.173)
By adding Eqs. (2.172) and (2.173) and enforcing the force balance, neglectingagain inertial effects, we obtain
F(pL) + F(−pL) = 0, (2.174)
than implies v0 − vG = −(H : (p ⊗ p))L2, that is, the rod center of gravity has arelative velocity with respect to the fluid at this position.
Remark 4 The fact of having obtained a non-zero relative velocity v0−vG �= 0 doesnot imply the existence of a migration mechanism, as proved in [45, 70] and [71].
Since the resulting torque must also vanish, the only possibility is that force Facts along p, that is F = λp, with λ ∈ R. Thus we can write
λp = ξ (∇v · pL − pL), (2.175)
which yields the same Jeffery equation that was obtained when considering the first-order velocity gradient:
p = ∇v · p − (∇v : (p ⊗ p)) p. (2.176)
The forces being again aligned in the rod direction, one could infer that the secondgradient does not suffice for activating bending mechanisms.
Until now, forces were assumed applied at the rod ends (beads). However, we candistribute them all along the rod length as commonly considered when calculatingparticles motion by using DPD (dissipative particle dynamics) methods.
In the next section, we consider forces applied all along the rod length as wasconsidered in [70].We prove that as soon as a second-gradient description is retained,bending mechanism appears naturally.
2.5.2.2 Second-Gradient Description of Rods with Distributed Forces
We consider now the system illustrated in Fig. 2.11 consisting of a rod R and thehydrodynamical forces applied all along its length. With the same reasoning andnotation as above, the applied distributed force f(s) at position sp, s ∈ [−L , L]reads
f(s) = ξ (v0 + ∇v · ps + (H : (p ⊗ p))s2 − vG − ps). (2.177)

86 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.11 Distributed hydrodynamic forces applied on a rod immersed in a Newtonian fluid, con-sidering the second-order velocity gradient
The resultant force F must vanish, that is
F =+L∫
−L
f(s) ds = 0, (2.178)
that leads to the following expression for the sliding velocity (rod-fluid relativevelocity at the rod center of gravity):
v0 − vG = − L2
3(H : (p ⊗ p)) . (2.179)
Thus, the distributed force reads:
f(s) = ξ
(∇v · ps + (H : (p ⊗ p))
(s2 − L2
3
)− ps
), (2.180)
which leads to the moment m(s)
m(s) = sp × ξ
(∇v · ps + (H : (p ⊗ p))
(s2 − L2
3
)− ps
), (2.181)
from which we can evaluate the resultant moment M
M =+L∫
−L
m(s) ds = p × ξ α (∇v · p − p) = 0, (2.182)
with α = ∫ +L−L s2 ds = 2
3 L3. This again yields Jeffery’s equation
p = ∇v · p − (∇v : (p ⊗ p)) p, (2.183)
i.e. the same equation as that obtained by assuming forces applied at the rod beads.

2.5 Advanced Topics 87
Introducing Jeffery’s equation (2.183) into thedistributed force expression (2.180),we obtain
f(s) = ξ
((H : (p ⊗ p))
(s2 − L2
3
)+ (∇v : (p ⊗ p))ps
). (2.184)
This force can be decomposed into two components, i.e. one, f‖(s), aligned withthe rod and the other, f⊥(s), perpendicular to it:
f‖(s) = ξ
((H ∵ (p ⊗ p ⊗ p))p
(s2 − L2
3
)+ (∇v : (p ⊗ p))ps
), (2.185)
and
f⊥(s) = ξ ((H : (p ⊗ p)) − (H ∵ (p ⊗ p ⊗ p)) p)
(s2 − L2
3
). (2.186)
Remark 5 We can notice from Eq. (2.186) that, when considering distributed forceswithin a first-gradient description (H = 0), the perpendicular component of theresulting distributed forces vanishes, i.e. f⊥(s) = 0 and bending mechanisms areonce again absent. However, bending seems possible as soon as second-gradientdescriptions implying H �= 0 are retained.
The resultant axial force F‖ reads
F‖ =L∫
0
f‖(s) ds = ξL2
2(∇v : (p ⊗ p))p, (2.187)
expression that corresponds to the one obtained in the case of concentrated forces ifwe consider the following relation between the distributed and concentrated frictioncoefficients:
ξ = L
2ξ . (2.188)
The main difference with respect to the situation in which forces were assumedapplied at the rod beads, occurs when considering the distributed force perpendicularto the rod. In this case
F⊥ =L∫
0
f⊥(s) ds = 0, (2.189)
in agreement with the results found when considering concentrated forces, but thedistributed force implies the existence of a bending moment M (s)k (acting in theout-of-plane direction defined by the unit vector k)

88 2 Complex Flows of Micro/Nano Structured Fluids . . .
M (s)k =L∫
s
(r − s)p × f⊥(r) dr. (2.190)
When the rod is rigid there are no major consequences, but in the case of flexiblerods this force creates rod bending with the associated elastic effects.
Remark 6 In the case of elastic rods, the bending moment implies rod curvature.Within the small strain and displacement hypotheses, the curvature is given by
d2u
ds2= M (s)
E I, (2.191)
where u(s) is the rod deflection with respect to its undeformed configuration, E theelastic modulus and I the moment of area of the rod cross section with respect tothe out-of-plane direction. By integrating this equation twice, we can obtain the rodbent configuration that, as expected, is symmetric with respect to the rod center ofgravity.
2.5.2.3 Third-Gradient Description
Now,we assume that the forcesF that act on each bead depend again on the differenceof velocities between the fluid and the bead, but the former now including the third-order velocity gradient J, i.e. that implies the fluid velocity at the bead position givenby v(pL) = v0+∇v ·pL +(H : (p ⊗ p)) L2+(J ∵ (p ⊗ p ⊗ p)) L3 and the secondone by vG + pL . Thus, the force F(pL) reads (see Fig. 2.12):
F(pL) = ξ (v0 + ∇v · pL + (H : (p ⊗ p))L2
+ (J ∵ (p ⊗ p ⊗ p))L3 − vG − pL), (2.192)
where the third-order velocity gradient J is the fourth-rank tensor with components
Ji jkm = 16
∂3vi∂x j ∂xk∂xm
.Obviously, ifF acts on the beadpL , then for the opposite bead at−pL the resulting
force reads
F(−pL) = ξ (v0 − ∇v · pL + (H : (p ⊗ p))L2
− (J ∵ (p ⊗ p ⊗ p))L3 − vG + pL). (2.193)
By adding Eqs. (2.192) and (2.193) and enforcing the force balance
F(pL) + F(−pL) = 0, (2.194)

2.5 Advanced Topics 89
Fig. 2.12 Hydrodynamicforces acting on a rodimmersed in a Newtonianfluid, considering thethird-order velocity gradient
we obtain again v0 − vG = −(
H : (p ⊗ p)
)L2.
As the resulting torque must also vanish, the only possibility is that the force Facts along p, that is F = λp, with λ ∈ R. Thus, we can write
λp = ξ(∇v · pL + (J ∵ (p ⊗ p ⊗ p))L3 − pL
), (2.195)
which multiplyied by p yields an expression of λ:
λ = ξ L(∇v : (p ⊗ p) + L2(J :: (p ⊗ p ⊗ p ⊗ p))
). (2.196)
We thus have
F = λp = ξ L
(∇v : (p ⊗ p)p
+ L2(J :: (p ⊗ p ⊗ p ⊗ p))p)
, (2.197)
which yield the rotary velocity
p = ∇v · p − (∇v : (p ⊗ p)) p + L2(J ∵ (p ⊗ p ⊗ p)
− (J :: (p ⊗ p ⊗ p ⊗ p))p), (2.198)
where we can identify Jeffery’s contribution pJ and a third-order correction pT h thatis affected by L2:
pJ = ∇v · p − (∇v : (p ⊗ p)) p, (2.199)

90 2 Complex Flows of Micro/Nano Structured Fluids . . .
andpT h = J ∵ (p ⊗ p ⊗ p) − (J :: (p ⊗ p ⊗ p ⊗ p))p, (2.200)
with the total rotary velocity given by:
p = pJ + L2 pT h . (2.201)
2.5.3 Accounting for Rod Bending
In this section, inspired from second-order fluids, we extend this higher-order frame-work to higher-order rod suspensions.
2.5.3.1 Second-Gradient Fluid Description
Within the first-gradient formulation, the internal power for a Newtonian fluid Wint
reads
Wint =∫
Ω
T : ∇v dx, (2.202)
where T = −pI + τ with τ = 2ηD. The associated balance of momentum reads:
ρ v = ∇ · T. (2.203)
Fried and Gurtin [72] proposed a second-gradient formulation involving the vor-ticity gradient. They proposed a non-standard form of the principle of virtual powerwith the internal power given by
Wint =∫
Ω
T : ∇v dx +∫
Ω
G : ∇ω dx, (2.204)
where ω is the vorticity vectorω = ∇ × v, (2.205)
and G is the so-called hyper-stress. The associated generalized momentum balancereads:
ρ v = ∇ · T + ∇ × (∇ · G). (2.206)
The following constitutive equationwas assumed in [73] for the fluid hyper-stress:
G = ηL 2f
(∇ω + ι(∇ω)T
), (2.207)

2.5 Advanced Topics 91
where the parameter ι ∈ [−1, 1] controls the asymmetry of the hyper-stress andensures a non-negative dissipation. In the previous equation L 2
f > 0 is known asthe fluid gradient length.
In the case of an incompressible fluid, the introduction of both the stress and thehyper-stress constitutive equations into the generalized momentum balance leads to:
ρ v = −∇ p + ηΔ(
v − L 2f Δv
). (2.208)
where ηL 2f represents the so-called hyper-viscosity [73].
See [73] for a discussion on the associated boundary conditions. The higher-order velocity derivatives involved in Eq. (2.208) require the enforcement of a largernumber of boundary conditions compared to the standard first-gradient formulation.
2.5.3.2 Second-Gradient Description of a Dilute Suspensionof Flexible Rods
Inspired by the use of the vorticity ω in the above second-gradient fluid flow descrip-tion, we consider now the rod beads being subjected to two actions, as depicted inFig. 2.13:
• A hydrodynamic force F that depends on the difference of velocities between thefluid and the bead. The fluid velocity at the bead position v(pL) taking into accountsecond-gradient effects reads
v(pL) = v0 + ∇v · pL + H : (p ⊗ p)L2. (2.209)
The bead velocity is again given by vG + pL . Thus, the resulting hydrodynamicforce reads
Fig. 2.13 Hydrodynamic forces applied on a flexible rod immersed in a Newtonian fluid

92 2 Complex Flows of Micro/Nano Structured Fluids . . .
F(pL) = ξ (v0 + ∇v · pL + H : (p ⊗ p)L2 − vG − pL). (2.210)
• A hydrodynamic torque M that depends on the difference between the differen-tial vorticity at the bead position and the bead rotary velocity ϕ. The differentialvorticity is the difference between the vorticity existing at the bead position minusthe one existing at the rod center of gravity. This torque could have its origin inthe distributed forces applied along the rod length as illustrated in Sect. 2.5.2.2.
Thus, the resulting torque reads
M(pL) = ξ R (∇ω · pL − ϕ(pL)), (2.211)
where ξ R is the rotary friction coefficient.
A forces balance yields
v0 − vG = −H : (p ⊗ p)L2, (2.212)
implying a second-order relative velocity of the rod center of gravity with respectto the fluid velocity at this position. Again, for notational simplicity, we considerF = F(pL) = −F(−pL).
As soon as we consider a first gradient of the vorticity-based bending mechanism∇ω · pL , it is easy to prove [74] that the rod kinematics remains unchanged relativeto Jeffery’s model, and that this term only affects rod bending. Thus, we obtain:
• The standard expression of the forces applying on the rod beads:
F = ξ L (∇v : (p ⊗ p)) p, (2.213)
• Jeffery’s rod kinematics:
p = ∇v · p − (∇v : (p ⊗ p) p, (2.214)
• The bending mechanism. Being ϕ = ϕ(pL) = −ϕ(−pL) [74] and assuming alinear elastic behavior of the rod, the relation between the applied torque M andthe bending angle ϕ at the rod bead is given by
ϕ = L
E IM, (2.215)
or
M = E I
Lϕ = κ ϕ, (2.216)
where E is the elastic modulus and I the moment of area of the rod cross section.

2.5 Advanced Topics 93
Introducing the expression of the moment M (2.211) into Eq. (2.216), we obtain
ξ R (∇ω · pL − ϕ) = κ ϕ, (2.217)
whose integration allows calculating ϕ(t) and from it the moment M.
Remark 7 It is noteworthy that:
• In first-gradient flows, rods orient according to Jeffery’s equation without experi-encing bending effects because the vorticity gradient vanishes.
• In second-order flows, rods orient according to Jeffery’s equation experiencing abending induced by the second gradient.
• In rigid kinematics, a rod moves with the fluid without experiencing any relativemovement. Since the vorticity gradient vanishes, there are no bending effects,ensuring the formulation objectivity.
The rod kinematics are then fully described by p and ϕ. Knowing p, we canlocate both rod beads. Then, knowing the bead bending angle ϕ and all the forcesand moments being applied at both ends, the deformed rod configuration is parabolicand symmetric with respect to the center of gravity. Thus, from (p and ϕ), we canpredict the bent configuration.
The stress has two components, the standard one and the one related to the hyper-stress. The first one is related to forces applied at both opposite beads acting in therod direction and includes the suspending medium contribution τ f = 2ηD:
τ = τ f + τ r = 2ηD +N∑
i=1
pi ⊗ Fi
= 2ηD + β∇v :(
N∑i=1
pi ⊗ pi ⊗ pi ⊗ pi
), (2.218)
with the total stress T given by
T = −p I + τ, (2.219)
which, as expected, is symmetric.The second one is related to second-gradient fluid contribution and rod bending.
We consider a partition of the total hyper-stress G consisting of the fluid G f and therods Gr contributions, with G = G f + Gr .
We consider a standard form of the second-gradient fluid contribution G f ,
G f = η L 2f
(∇ω + ι(∇ω)T
), (2.220)
where L 2f is the fluid gradient length.

94 2 Complex Flows of Micro/Nano Structured Fluids . . .
On the other hand, we compute the rod contribution to the hyper-stress Gr from
Gr = υ
N∑i=1
pi ⊗ Mi , (2.221)
from which we assume the more general form
Gr = Gr + ς(Gr )T
. (2.222)
2.5.3.3 Mesoscopic Description
Making use of the orientation distribution function Ψ (x, t, p,ϕ), we can proceedto the calculation of the stress within a continuous macroscopic description. Con-sidering the stress expression (2.218) and the use of the quadratic closure relationA ≈ a ⊗ a, we obtain:
τ = τ f + τ r = 2ηD + 2ηNp (D : A) ≈ 2ηD + 2ηNp (D : a) a, (2.223)
with T = −p I + τ .On the other hand, the hyper-stress is given by:
Gr = υ
∫S×C
p ⊗ M Ψ dp dϕ, (2.224)
and, by using the expression of the moment,
Gr = υκ
∫S×C
p ⊗ ϕ Ψ dp dϕ
= κ
∫S×C
p ⊗ ϕ Ψ dp dϕ. (2.225)
In the previous expressions, the distribution function Ψ = Ψ (x, t, p,ϕ) (itsdependence on the different coordinates is omitted for the sake of clarity) givesthe fraction of rods that at position x and time t have a conformation given by (p,ϕ).The domainsS and C refer respectively to the domains in which coordinates p andϕ are defined.
Remark 8 One could expect that the moment (2.225) vanishes, however taking intoaccount that Ψ (p,ϕ) = Ψ (−p,−ϕ), the integral does not vanish.
In order to close the formulation, we consider the second-order tensor g (such thatGr = κ g):
g =∫S×C
p ⊗ ϕ Ψ dp dϕ, (2.226)

2.5 Advanced Topics 95
and compute its time derivative taking into account the expressions of p (2.214) andϕ (2.217):
g =∫S×C
(p ⊗ ϕ + p ⊗ ϕ) Ψ dp dϕ
=∫S×C
(∇v · p − (∇v : (p ⊗ p)) p) ⊗ ϕ Ψ dp dϕ
+∫S×C
p ⊗(
∇ω · pL − κ
ξ Rϕ
)Ψ dp dϕ
= ∇v · g − ∇v :(∫
S×Cp ⊗ p ⊗ p ⊗ ϕ Ψ dp dϕ
)
+ La · (∇ω)T − κ
ξ Rg. (2.227)
If we adopt the following closure relation:
∫S×C
p ⊗ p ⊗ p ⊗ ϕ Ψ dp dϕ ≈ a ⊗ g, (2.228)
then we obtain a closed form for the evolution of g:
g = ∇v · g − (∇v : a)g + La · (∇ω)T − κ
ξ Rg. (2.229)
Multiplying Eq. (2.229) by κ , we obtain the time evolution of the contribution ofrods to the hyper-stress:
Gr = ∇v · Gr − (∇v : a)Gr + L κa · (∇ω)T − κ
ξ RGr . (2.230)
If we consider the coefficient affecting the vorticity gradient in Eq. (2.230) andtake into account the relations κ = υκ and κ = E I/L , we obtain
L κ = E(υ I ) = EL 2r , (2.231)
where L 2r represents the rod gradient length. The last term in equation (2.230)
involves the coefficient κ/ξ R with reciprocal time units, which, in absence of flow,controls the relaxation to the undeformed reference configuration.Thus, the inverse ofthis coefficient has the meaning of a relaxation time that we denote byT . Moreover,taking into account the symmetry of tensor a, we have ∇v : a = D : a. Thus, Eq.(2.230) can be rewritten as
Gr = ∇v · Gr − (D : a) Gr + EL 2r a · (∇ω)T − 1
TGr . (2.232)

96 2 Complex Flows of Micro/Nano Structured Fluids . . .
It is important to notice that the above equation involves two closure relations,the one related to the fourth-order orientation tensor A and the one expressed in Eq.(2.228).
The macroscopic flow model can thus be summarized as follows:
• Generalized momentum balance:
ρ v = ∇ · T + ∇ × (∇ · G), (2.233)
• Mass balance∇ · v = 0, (2.234)
• Constitutive equation:T = −p I + τ, (2.235)
with τ = τ f + τ r :τ f = 2ηD, (2.236)
andτ r = 2ηNp(∇v : a)a = 2ηNp (D : a)a, (2.237)
• Hyper-stress G = G f + Gr :
G f = ηL 2f
(∇ω + ι(∇ω)T
), (2.238)
andGr = Gr + ς
(Gr )T
, (2.239)
with
Gr = ∇v · Gr − (D : a)Gr + EL 2r a · (∇ω)T − 1
TGr . (2.240)
2.5.4 Delaying Orientation Mechanisms
While the models proposed until now allowed the introduction of rod bending mech-anisms, the rotary velocity remained unchanged however. In this section, we proposealternative models able to control the rod rotary velocity.
A simple proposals consists in considering rods subjected to three actions:
1. The hydrodynamic force, which reads as in previous sections
F(pL) = ξ (v0 + ∇v · pL + (H : (p ⊗ p))L2 − vG − pL). (2.241)

2.5 Advanced Topics 97
2. A torque acting at each bead involving the first gradient of potential Υ . Thus, theresulting torque at bead pL reads
M(pL) = ξ I (∇Υ · pL − ϕ(pL)). (2.242)
3. A torque M at the rod centre of gravity scaling with the difference between Υ
and the objective rotary velocity θ − ω,
M = ξ R (Υ − (θ − ω)). (2.243)
Here, ω is the vorticity: ω = ∇ × v, such that ω × p = Ω · p, with Ω theantisymmetric component of the velocity gradient.
A force balance yields again
v0 − vG = −H : (p ⊗ p)L2. (2.244)
By enforcing the moment balance, we obtain
2Lp × F + M + M(pL) + M(−pL) = 0, (2.245)
which reads
2ξ L2 (p × ∇v · p − θ
)+ξ R (Υ −(θ −ω))−ξ I (ϕ(pL) + ϕ(−pL)) = 0. (2.246)
Taking into account p × Ω · p = p × ω × p = ω, we obtain the rod rotary velocity
θ = ω + 2ξ L2
2ξ L2 + ξ R(p × D · p)
+ ξ R
2ξ L2 + ξ RΥ − 2ξ I
2ξ L2 + ξ Rϕ, (2.247)
withDbeing the symmetric component of the velocity gradient and ϕ= ϕ(pL) + ϕ(−pL)2 .
The previous equation can be rewritten as:
p = Ω · p + 2ξ L2
2ξ L2 + ξ R (D · p − (D : (p ⊗ p))p)
+ ξ R
2ξ L2 + ξ RΥ × p − 2ξ I
2ξ L2 + ξ Rϕ × p, (2.248)
where it can be noticed that the objectivity is ensured, and for that, consideration ofthe relative velocity (θ − ω) in the expression of M was a key choice.

98 2 Complex Flows of Micro/Nano Structured Fluids . . .
Remark 9 With ξ R = ξ I = 0, we recover the Jeffery kinematics. With ξ I = 0, weremove elastic effects but the Jeffery kinematics are affected when considering ξ R
large enough. In the case of ξ R � 2ξ L2 (or ξ R → ∞), we obtain
p ≈ Ω · p + Υ × p = (ω + Υ ) × p. (2.249)
When Υ = −ω, rods can translate without rotating at all. On the other hand, ifΥ = 0, we obtain rigid kinematics with p = Ω · p governed by the flow vorticity.
The force acting on the bead reads
F(pL) = ξ L
(D · p
(1 − 2ξ L2
2ξ L2 + ξ R
)+ 2ξ L2
2ξ L2 + ξ R(D : (p ⊗ p))p
)
− ξ Rξ L
2ξ L2 + ξ RΥ × p + 2ξ I ξ L
2ξ L2 + ξ Rϕ × p. (2.250)
The force applied on the beads has a component acting along the rod direction
F‖(pL) = ξ L(D : (p ⊗ p))p, (2.251)
and another perpendicular to it and contained in the plane inwhich the rod orientationis defined
F⊥(pL) = ξ Rξ L
2ξ L2 + ξ R(D · p − (D : (p ⊗ p))p)
− ξ Rξ L
2ξ L2 + ξ RΥ × p + 2ξ I ξ L
2ξ L2 + ξ Rϕ × p. (2.252)
This implies thatF⊥(−pL) = −F⊥(pL). (2.253)
This modeling approach allows for modifying the Jeffery kinematics while keep-ing a first-gradient description of the induced torques able to activate rod bending.
The choice of the interaction potential Υ is the key point of this modelingapproach. A simple choice consists in assuming that at position pL the microstruc-ture is described by the second-order moment a(x, t) of the orientation distributionfunction ψ(x, t, p). The simplest choice for the interaction potential Υ is the rotaryvelocity of the eigenvectors of tensor a.
2.5.5 Collective Effects
We start by obtaining the Jeffery equation but now with the force F applied at therod beads (see Fig. 2.14) calculated from the Cauchy stress τ .

2.5 Advanced Topics 99
Fig. 2.14 Forces applied ona rod immersed in a flowingfluid
Thus, we writeF(pL) = τ · p − κ(p − Ω · p), (2.254)
where κ is a model parameter whose impact will be analyzed later. The fact ofconsidering the term involving the vorticity tensor Ω ensures the objectivity of theresulting rotary velocity.
We can notice that if F applies at bead located at pL , then the force at the oppositebead at −pL reads
F(−pL) = −F(pL), (2.255)
which ensures the equilibrium of forces. For the sake of notational simplicity, theforce acting on bead pL will be noted simply by F.
As the resulting torque must also vanish, the only possibility is that force F actsalong p, that is F = λp, with λ ∈ R. Thus, we can write
λp = τ · p − κ(p − Ω · p). (2.256)
Premultiplying Eq. (2.256) by p and taking into account that p · p = 1 andconsequently p · p = 0, and that Ω : (p ⊗ p) = 0 since Ω is skew-symmetric, wehave
λ = τ : (p ⊗ p), (2.257)
which leads to the extended Jeffery equation
p = Ω · p + 1
κ(τ · p − (τ : (p ⊗ p)) p) . (2.258)
When considering τ = 2ηD and κ = 2η, Eq. (2.258) reduces to the standardJeffery equation.

100 2 Complex Flows of Micro/Nano Structured Fluids . . .
The forces applied at the rod ends pL and −pL are respectively λp and −λp, i.e.directed along the rod and in equilibrium by construction.
With λ given by Eq. (2.257), we have
F(pL) = (τ : (p ⊗ p)) p. (2.259)
By applying Kramers’ formula, the corresponding contribution to the stress isgiven by
� p = (τ : (p ⊗ p))p ⊗ p, (2.260)
which can be rewritten as
� p = τ : (p ⊗ p ⊗ p ⊗ p). (2.261)
For considering the effect of all rods in the suspensions, it suffices to considerthe integral of each contribution averaged with the orientation distribution function,adding the Newtonian matrix contribution 2ηD. The self-consistency implies:
τ = 2ηD + A : τ . (2.262)
We now consider the equation governing the evolution of the second-ordermoment a. For this purpose, we take its time derivative
a =∫S
(p ⊗ p + p ⊗ p) ψ dp, (2.263)
and consider the extended Jeffery expression (2.258) to express the rod rotary velocityp. Thus, we obtain
a = Ω · a − a · Ω + 1
κ(τ · a + a · τ ) − 2
κA : τ . (2.264)
Remark 10 When considering again τ = 2ηD and κ = 2η, Eq. (2.264) reducesto the standard orientation evolution equation. However, by considering the sameconstitutive equation τ = 2ηD but κ �= 2η, we obtain a sort of sliding while ensuringtheobjectivity of the evolution equation that involves the so-called Johnson-Segalmanobjective derivative. Some authors introduced such sliding affecting the gradient ofvelocities, a choice that violates the objectivity of the resulting model.
2.5.5.1 Jeffery’s Model with Feedback
We consider in the case of dilute rod suspensions the Cauchy stress
τ = 2ηD + 2ηNpA : D, (2.265)
that was derived from the standard Jeffery model.

2.5 Advanced Topics 101
By considering the stress (2.265) in the extended Jeffery expression (2.258), weobtain
p = Ω · p + 2η
κ(D · p − (D : (p ⊗ p)) p)
− 2ηNp
κ((A : D) · p − ((A : D) : (p ⊗ p)) p) . (2.266)
The associated orientation equation governing the evolution of a (2.264) reads
a = Ω · a − a · Ω + 2η
κ(D · a + a · D − 2A : D)
− 2ηNp
κ((A : D) · a + a · (A : D)T − 2A : (A : D)). (2.267)
Remark 11 By considering κ = 2η and Np = 0 in Eqs. (2.266) and (2.267), weobtain the standard orientation equations. The extra-term, the one affected by thecoefficient Np, is related to the feedback.
2.5.6 Orientation Induced by an Electric Field
In this section, we propose first the equation governing the orientation of a rodimmersed in a Newtonian fluid of viscosity η considering an electrical field ε(x, t)and a velocity field v(x, t). Then, thismodelwill be introduced in coarser descriptionsof the rod population within the kinetic theory framework.
We consider a suspending medium consisting of a Newtonian fluid in which thereare suspended N rigid slender rods (e.g. CNTs) of length 2L . As first approximation,it is assumed that the rod presence and orientation do not affect the flow kinematicsthat are defined by the velocity field v(x, t), with x ∈ Ω ∈ R
d .The microstructure can be described at the microscopic scale by the unit vector
defining the orientation of each rod, i.e. pi , i = 1, . . . , N . In absence of electricalfield, one fiber can be defined by p or −p and a symmetry condition is retained inthe orientation distribution. However, when considering the electrical field inducedcharges, that symmetry is broken and the orientation is defined univocally.We assumethat p points from the negative bead to the positive one.
If the suspension is dilute enough, rod interaction can be neglected and then amicro-mechanical model can be derived by considering a single generic rod whoseorientation is defined by the unit vector p.
We consider the system illustrated in Fig. 2.15 consisting of a rod immersed in afluid flow and experiencing the effects of an external electric field.
The resulting forces applied at the rod beads, again taking into account that v0 =vG , read:
F(pL) = E + ξ L (∇v · p − p) . (2.268)

102 2 Complex Flows of Micro/Nano Structured Fluids . . .
Fig. 2.15 Hydrodynamicand electrostatic forcesapplied on a rod immersed ina Newtonian fluid
Obviously, if F applies on the bead pL , then at the opposite bead −pL , theresulting force reads
F(−pL) = −E − ξ L (∇v · p − p) , (2.269)
where both beads are assumed having an electrical charge of opposite sign. Thus,the linear momentum balance is ensured. As the resulting torque must also vanish,the only possibility is that force F acts along p, that is F = λp, with λ ∈ R. Thus wecan write
λp = E + ξ L (∇v · p − p) . (2.270)
Premultiplying Eq. (2.270) by p and taking into account that p · p = 1 andconsequently p · p = 0, we obtain:
λ = E · p + ξ L(
pT · ∇v · p)
, (2.271)
implying
F = (E · p) p + ξ L(
pT · ∇v · p)
p, (2.272)
and
p = 1
ξ L(E − (E · p)p) +
(∇v · p −
(pT · ∇v · p
)p)
. (2.273)
This can be rewritten as:
p = 1
ξ L(I − p ⊗ p) · E +
(∇v · p −
(pT · ∇v · p
)p)
= pE + pJ , (2.274)
where pE stands for the rotary velocity due to the electrostatic forces and pJ repre-sents the hydrodynamic contribution (described by the Jeffery equation).

2.5 Advanced Topics 103
2.5.6.1 Mesoscopic Description
As the rod population is very large, the description that we just proposed, despiteits conceptual simplicity, fails to address the situations usually encountered in prac-tice. For this reason, coarser descriptions are preferred. The first plausible coarserdescription applies a zoom-out, in which the rod individuality is lost in favour ofprobability distribution function based descriptions.
In the case of rods, one could describe the microstructure at a certain point x andtime t from the orientation distribution function Ψ (x, t, p) that gives the fraction ofrods that at position x and time t are oriented in direction p. Obviously, the functionΨ verifies the normality condition:
∫S
Ψ (x, t, p) dp = 1, ∀x, ∀t, (2.275)
whereS is the surface of the unit ball that defines all possible rod orientations. Thebalance ensuring the probability conservation reads:
∂Ψ
∂t+ ∇x · (x Ψ ) + ∇p · (p Ψ ) = 0, (2.276)
wherein for inertialess rods x = v(x, t) and the rod rotary velocity is given by Eq.(2.274),
p = 1
ξ L(I − p ⊗ p) · E +
(∇v · p −
(pT · ∇v · p
)p)
. (2.277)
2.5.6.2 Macroscopic Description
In this section, we illustrate the transition from the mesoscopic to the macroscopicscale. At the macroscopic scale, the orientation distribution function is substitutedby its moments for describing the microstructure. We consider the first to fourthorientation moments a(1), a(2), a(3) and a(4), respectively defined from:
a(1) =∫S
p Ψ dp, (2.278)
a(2) =∫S
p ⊗ p Ψ dp, (2.279)
a(3) =∫S
p ⊗ p ⊗ p Ψ dp (2.280)

104 2 Complex Flows of Micro/Nano Structured Fluids . . .
and
a(4) =∫S
p ⊗ p ⊗ p ⊗ p Ψ dp. (2.281)
The time derivative of a(1) reads
a(1) =∫S
p Ψ dp =∫S
(pE + pJ
)Ψ dp
= 1
ξ L
∫S
(I − p ⊗ p) · E Ψ dp +∫S
(∇v · p −
(pT · ∇v · p
)p)
Ψ dp
= 1
ξ L
(E − a(2) · E
)+ ∇v · a(1) − ∇v : a(3). (2.282)
In the previous expression, a closure issue appears related to a(2) and a(3). Wecould evaluate the time derivative of the second moment, but again higher-ordermoments are involved and the closure issue persists.
2.5.6.3 Introducing Randomizing Mechanisms
The main issue of the modeling approach just presented is that it tends to fully alignrods along a given direction, that is:
p(t → ∞) = p, (2.283)
anda(1)(t → ∞) = p, (2.284)
where p is a given orientation that results as a compromise between the ones enforcedby the flow and the electrical field.
In flowing systems, full alignment is prevented by rod-rod interactions that havea randomizing effect. This effect can be accurately modeled with a diffusion term inthe Fokker-Planck equation, that moreover accounts for Brownian effects:
∂Ψ
∂t+ ∇x · (vΨ ) + ∇p · (p Ψ ) = ∇p · (
Dr∇pΨ), (2.285)
where Dr quantifies the isotropic Brownian diffusion. The rotary velocity is givenagain by:
p = 1
ξ L(I − p ⊗ p) · E +
(∇v · p −
(pT · ∇v · p
)p)
. (2.286)
Equation (2.285) can be rewritten as:
∂Ψ
∂t+ ∇x · (v Ψ ) + ∇p ·
( ˙p Ψ)
= 0, (2.287)

2.5 Advanced Topics 105
with the equivalent rotary velocity given by
˙p = p Ψ − Dr∇pΨ
Ψ. (2.288)
Now, coming back to the macroscopic scale, the evolution of the first momentof the orientation distribution function, following the rationale considered in [43](Sect. 3.3), is obtained:
a(1) ≈ 1
ξ L
(E − a(2) · E
)+ ∇v · a(1) − ∇v : a(3) − Dr a(1), (2.289)
which ensures, in absence of electrical field E = 0 and absence of flow v(x, t) = 0,a fully random (isotropic) distribution, i.e. a(1)(t → ∞; E = 0, v = 0) = 0.
References
1. G.B. Jeffery, The motion of ellipsoidal particles immersed in a viscous fluid. Proc. R. Soc.Lond. A102, 161–179 (1922)
2. R.Keunings, inMicro-Macro Methods for the Multiscale Simulation of Viscoelastic Flow UsingMolecular Models of Kinetic Theory. eds. by D.M. Binding, K. Walters. Rheology Reviews(British Society of Rheology, Durham, 2004), pp. 67–98
3. R.B. Bird, C.F. Curtiss, R.C. Armstrong, O. Hassager, in Dynamic of Polymeric Liquid. KineticTheory, vol 2 (Wiley, New York, 1987)
4. M. Doi, S.F. Edwards, The Theory of Polymer Dynamics (Clarendon Press, Oxford, 1987)5. A. Ammar, F. Chinesta, A particle strategy for solving the Fokker-Planck equation governing
the fibre orientation distribution in steady recirculating flows involving short fibre suspensions.Lect. Notes Comput. Sci. Eng. 43, 1–16 (2005)
6. C.V. Chaubal, A. Srinivasan, O. Egecioglu, L.G. Leal, Smoothed particle hydrodynamics tech-niques for the solution of kinetic theory problems. J. Non-Newtonian FluidMech. 70, 125–154(1997)
7. C. Chauviere, A. Lozinski, Simulation of dilute polymer solutions using a Fokker-Planckequation. Comput. Fluids. 33, 687–696 (2004)
8. F. Chinesta, G. Chaidron, A. Poitou, On the solution of the Fokker-Planck equation in steadyrecirculating flows involving short fibre suspensions. J. Non-Newtonian Fluid Mech. 113, 97–125 (2003)
9. C. Cruz, L. Illoul, F. Chinesta, G. Regnier, Effects of a bent structure on the linear viscoelasticresponse of carbon nanotube diluted suspensions. Rheol. Acta 49, 1141–1155 (2010)
10. C. Cruz, F. Chinesta, G. Regnier, Review on the Brownian dynamics simulation of bead-rod-spring models encountered in computational rheology. Arch. Comput. Methods Eng. 19(2),227–259 (2012)
11. H.C. Öttinger, M. Laso, in Smart Polymers in Finite-Element calculations, eds. by P. Mold-enaers, R. Keunings. Theoretical and Applied Rheology, Proceedings on XIth InternationalCongress on Rheology, vol. 1 (Elsevier, Amsterdam, 1992), pp. 286–288
12. P. Wapperom, R. Keunings, V. Legat, The backward-tracking Lagrangian particle method fortransient viscoelastic flows. J. Non-Newtonian Fluid Mech. 91, 273–295 (2000)
13. P. Wapperom, R. Keunings, Numerical simulation of branched polymer melts in transientcomplex flows using pom-pom models. J. Non-Newtonian Fluid Mech. 97, 267–281 (2001)

106 2 Complex Flows of Micro/Nano Structured Fluids . . .
14. A. Lozinski, C. Chauviere, A fast solver for Fokker-Planck equation applied to viscoelasticflows calculations: 2D FENE model. J. Comput. Phys. 189, 607–625 (2003)
15. A. Ammar, B. Mokdad, F. Chinesta, R. Keunings, A new family of solvers for some classesof multidimensional partial differential equations encountered in kinetic theory modeling ofcomplex fluids. J. Non-Newtonian Fluid Mech. 139, 153–176 (2006)
16. A. Ammar, B. Mokdad, F. Chinesta, R. Keunings, A new family of solvers for some classesof multidimensional partial differential equations encountered in kinetic theory modeling ofcomplex fluids. Part II: transient simulation using space-time separated representations. J.Non-Newtonian Fluid Mech. 144, 98–121 (2007)
17. F. Chinesta, A. Ammar, A. Leygue, R. Keunings, An overview of the proper generalizeddecomposition with applications in computational rheology. J. Non-Newtonian Fluid Mech.166, 578–592 (2011)
18. F. Chinesta, R. Keunings, A. Leygue, The Proper Generalized Decomposition for AdvancedNumerical Simulations (Springer, New York, 2014)
19. B. Mokdad, E. Pruliere, A. Ammar, F. Chinesta, On the simulation of kinetic theory models ofcomplex fluids using the Fokker-Planck approach. Appl. Rheol. 17(2), 1–14, 26494 (2007)
20. K.Chiba,A.Ammar, F.Chinesta,On thefiber orientation in steady recirculatingflows involvingshort fibers suspensions. Rheol. Acta 44, 406–417 (2005)
21. R. Keunings, On the Peterlin approximation for finitely extensible dumbbells. J. Non-Newtonian Fluid Mech. 68, 85–100 (1997)
22. F. Folgar, C. Tucker, Orientation behavior of fibers in concentrated suspensions. J. Reinf. Plast.Comp. 3, 98–119 (1984)
23. G.K. Batchelor, The stress system in a suspension of force-free particles. J. Fluid Mech. 41,545–570 (1970)
24. G.L. Hand, A theory of anisotropic fluids. J. Fluid Mech. 13, 33–62 (1962)25. J. Hinch, G. Leal, The effect of Brownian motion on the rheological properties of a suspension
of non-spherical particles. J. Fluid Mech. 52, 683–712 (1972)26. J. Hinch, G. Leal, Constitutive equations in suspension mechanics. Part I. J. Fluid Mech. 71,
481–495 (1975)27. J. Hinch, G. Leal, Constitutive equations in suspension mechanics. Part II. J. Fluid Mech. 76,
187–208 (1976)28. S. Advani (ed.), Flow and Rheology in Polymer Composites Manufacturing (Elsevier, Amster-
dam, 1994)29. J. Azaiez, K. Chiba, F. Chinesta, A. Poitou, State-of-the-art on numerical simulation of fiber-
reinforced thermoplastic forming processes. Arch. Comput. Methods Eng. 9(2), 141–198(2002)
30. E. Cueto, R. Monge, F. Chinesta, A. Poitou, I. Alfaro, M. Mackley, Rheological modeling andforming process simulation of CNT nanocomposites. Int. J. Mater. Form. 3(2), 1327–1338(2010)
31. M.A. Martinez, E. Cueto, M. Doblar, F. Chinesta, Natural element meshless simulation ofinjection processes involving short fiber suspensions. J. Non-Newtonian Fluid Mech. 115,51–78 (2003)
32. C. Tucker, Flow regimes for fiber suspensions in narrow gaps. J. Non-Newtonian Fluid Mech.39, 239–268 (1991)
33. A. Ma, F. Chinesta, M. Mackley, The rheology and modelling of chemically treated carbonnanotube suspensions. J. Rheol. 53(3), 547–573 (2009)
34. C. Petrie, The rheology of fibre suspensions. J. Non-Newtonian Fluid Mech. 87, 369–402(1999)
35. J. Ferec, G. Ausias, M.C. Heuzey, P. Carreau, Modeling fiber interactions in semiconcentratedfiber suspensions. J. Rheol. 53(1), 49–72 (2009)
36. J. Wang, C.A. Silva, J.C. Viana, F.W.J. van Hattum, A.M. Cunha, C. Tucker, Prediction of fiberorientation in a rotating compressing and expanding mold. Polym. Eng. Sci. 48(7), 1405–1413(2008)

References 107
37. J.Wang, J. O’Gara, C. Tucker, An objective model for slow orientation kinetics in concentratedfiber suspensions: theory and rheological evidence. J. Rheol. 52(5), 1179–1200 (2008)
38. J. Phelps, C. Tucker, An anisotropic rotary diffusion model for fiber orientation in short andlong fiber thermoplastics. J. Non-Newtonian Fluid Mech. 156(3), 165–176 (2009)
39. A. Ma, F. Chinesta, A. Ammar, M. Mackley, Rheological modelling of carbon nanotube aggre-gate suspensions. J. Rheol. 52(6), 1311–1330 (2008)
40. G. Ausias, X.J. Fan, R. Tanner, Direct simulation for concentrated fibre suspensions in transientand steady state shear flows. J. Non-Newtonian Fluid Mech. 135, 46–57 (2006)
41. S. Le Corre, D. Caillerie, L. Orgéas, D. Favier, Behavior of a net of fibers linked by viscousinteractions: theory and mechanical properties. J. Mech. Phys. Solids 52(2), 395–421 (2004)
42. S. Le Corre, P. Dumont, L. Orgéas, D. Favier, Rheology of highly concentrated planar fibersuspensions. J. Rheol. 49(5), 1029 (2005)
43. F. Chinesta, From single-scale to two-scales kinetic theory descriptions of rods suspensions.Arch. Comput. Methods Eng. 20(1), 1–29 (2013)
44. E. Abisset-Chavanne, R. Mezher, S. Le Corre, A. Ammar, F. Chinesta, Kinetic theorymicrostructure modeling in concentrated suspensions. Entropy 15, 2805–2832 (2013)
45. E. Abisset-Chavanne, F. Chinesta, J. Ferec, G. Ausias, R. Keunings, On the multiscale descrip-tion of dilute suspensions of non-Brownian rigid clusters composed of rods. J. Non-NewtonianFluid Mech. (in press)
46. S. Advani, C. Tucker, The use of tensors to describe and predict fiber orientation in short fibercomposites. J. Rheol. 31, 751–784 (1987)
47. S. Advani, C. Tucker, Closure approximations for three-dimensional structure tensors. J. Rheol.34, 367–386 (1990)
48. F. Dupret, V. Verleye, in Modelling the Flow of Fibre Suspensions in Narrow Gaps, eds. byD.A. Siginer, D. De Kee, R.P. Chabra. Advances in the Flow and Rheology of Non-NewtonianFluids (Elsevier, Rheology Series, Amsterdam, 1999), pp. 1347–1398
49. M. Kroger, A. Ammar, F. Chinesta, Consistent closure schemes for statistical models ofanisotropic fluids. J. Non-Newtonian Fluid Mech. 149, 40–55 (2008)
50. E. Pruliere, A. Ammar, N. El Kissi, F. Chinesta, Recirculating flows involving short fibersuspensions: numerical difficulties and efficient advancedmicro-macro solvers. Arch. Comput.Methods Eng. State Art Rev. 16, 1–30 (2009)
51. P. Grassia, J. Hinch, L.C. Nitsche, Computer simulations of brownian motion of complexsystems. J. Fluid Mech. 282, 373–403 (1995)
52. P. Grassia, J. Hinch, Computer simulations of polymer chain relaxation via brownian motion.J. Fluid Mech. 308, 255–288 (1996)
53. H.C. Öttinger, Stochastic Processes in Polymeric Fluids (Springer, Berlin, 1996)54. P. Dumont, S. Le Corre, L. Orgeas, D. Favier, A numerical analysis of the evolution of bundle
orientation in concentrated fibre-bundle suspensions. J. Non-Newtonian Fluid Mech. 160, 76–92 (2009)
55. J. Ferec, E. Abisset-Chavanne, G. Ausias, F. Chinesta, The use of interaction tensors to describeand predict rod interactions in rod suspensions. Rheol. Acta 53(5–6), 445–456 (2014)
56. E. Pichelin, T. Coupez, Finite element solution of the 3Dmold filling for viscous incompressiblefluid. Comput. Methods Appl. Mech. Eng. 163, 359 (1998)
57. D. Gonzalez, E. Cueto, F. Chinesta,M.Doblare, A natural element updated Lagrangian strategyfor free-surface fluid dynamics. J. Comput. Phys. 223(1), 127–150 (2007)
58. T. Belytschko, Y. Krongauz, D. Organ, M. Fleming, P. Krysl, Meshless methods: an overviewand recent developments. Comput. Methods Appl. Mech. Eng. 139, 3–47 (1998)
59. F. Chinesta, S. Cescotto, E. Cueto, P. Lorong, Natural Element Method for the Simulation ofStructures and Processes (ISTE Wiley, London, 2011)
60. R. Sibson, A vector identity for the Dirichlet tesselation. Math. Proc. Camb. Philos. Soc. 87,151–155 (1980)
61. V. Belikov, V. Ivanov, V. Kontorovich, S. Korytnik, A. Semenov, The non-sibsonian interpo-lation: a new method of interpolation of the values of a function on an arbitrary set of points.Comput. Math. Math. Phys. 37(1), 9–15 (1997)

108 2 Complex Flows of Micro/Nano Structured Fluids . . .
62. E. Cueto,M. Doblare, L. Gracia, Imposing essential boundary conditions in the natural elementmethod by means of density-scaled alpha-shapes. Int. J. Numer. Methods Eng. 49(4), 519–546(2000)
63. J. Yvonnet, D. Ryckelynck, P. Lorong, F. Chinesta, A new extension of the natural elementmethod for non-convex and discontinuous problems: the constrained natural element method.Int. J. Numer. Methods Eng. 60(8), 1452–1474 (2004)
64. J.A. Garcia, Ll. Gascon, E. Cueto, I. Ordeig, F. Chinesta, Meshless methods with application toresin transfer molding simulation. Comput. Methods Appl. Mech. Eng. 198, 27002709 (2009)
65. E. Cueto, M. Laso, F. Chinesta, Meshless stochastic simulation of maicro-macro kinetic theorymodels. Int. J. Multiscale Comput. Eng. 9(1), 1–16 (2011)
66. E. Cueto, A. Ma, F. Chinesta, M. Mackley, Numerical simulation of spin coating processesinvolving functionalised carbon nanotube suspensions. Int. J. Mater. Form. 1(2), 89–99 (2008)
67. J. Yvonnet, P. Villon, F. Chinesta, Natural element approximations involving bubbles for treat-ingmechanicalmodels in incompressiblemedia. Int. J.Numer.MethodsEng. 66(7), 1125–1152(2006)
68. A. Ma, F. Chinesta, M. Mackley, A. Ammar, The rheological modelling of carbon nanotube(CNT) suspensions in steady shear flows. Int. J. Mat. Form. 2, 83–88 (2008)
69. F. Chinesta, A. Ammar, A. Falco,M. Laso, On the reduction of stochastic kinetic theorymodelsof complex fluids. Model. Simul. Mater. Sci. Eng. 15, 639–652 (2007)
70. R. Shanker, J.W. Gillespie, S.I. Güçeri, On the effect of nonhomogeneous flow fields on theorientation distribution and rheology of fiber suspensions. Polym. Eng. Sci. 31, 161–171 (1991)
71. R. Shanker, The effect of non homogeneous flow fields and hydrodynamic interactions on therheology of fiber suspensions, Ph.D. dissertation, University of Delaware, 1991
72. E. Fried, M.E. Gurtin, Tractions, balances, and boundary conditions for non-simple materialswith application to liquid flow at small length scales. Arch. Ration. Mech. Anal. 182, 513–554(2006)
73. T.Kim, J.Dolbow,E. Fried,Anumericalmethod for a second-gradient theory of incompressiblefluid flow. J. Comput. Phys. 223, 551–570 (2007)
74. E. Abisset-Chavanne, J. Ferec, G. Ausias, E. Cueto, F. Chinesta, R. Keunings, A second-gradient theory of dilute suspensions of flexible rods in a Newtonian fluid. Arch. Comput.Methods Eng. (in press)

Chapter 3Flows of Simple Fluids in ComplexMicrostructures: Composite Processingof Structural Polymer Composites
Abstract Continuous fiber reinforced polymer (CFRP) always involves a fluid flowthrough the fibrous medium, whether to create a semi-product like a prepreg that willbe further processed to make the final part or to directly manufacture a part fromdry fiber reinforcement. This chapter discusses the physics and modeling of flow ofsimple fluids within complex microstructure. Microstructure refers here to featuresof internal structure of engineered fibrous materials used to reinforce polymer com-posites. As already mentioned earlier in this book, the flow is greatly influenced bythe type of fibers being used and is viewed as key for ensuring successful fabrication.This chapter has a complementary focus as compared to Chap. 2. Here only mediamade of continuous fibers are considered. An important characteristic of continuousfibers is that they cannot flow with the polymer, even if the viscosity of the polymeris low. This chapter reviews the modeling of viscous resin into a porous network ofstationary fibers, at a variety of length scales. As far engineered fibrous materialsare concerned, the appropriate length scales are those that reveal the partition of thefibrous media into regions of nearly continuous phase such as continuous fibers andcluster of fibers called fiber bundles.
3.1 Introduction
Polymer composites are usually divided into two groups, advanced (or high perfor-mance) composites and engineering composites. They differ principally in the typeand length of the fiber reinforcement and in the characteristics of the resins used.Polymer reinforced by a high content of continuous fiber (carbon or glass) belongs tothe second one. However there is not sharp division boundary between both groups,one type of composite changes gradually into the other. An important characteristicof continuous fibers is that they cannot flowwith the polymer, even if the viscosity ofthe polymer is low. Continuous fiber reinforced polymer (CFRP) always involves afluid flow through the fibrousmedium,whether to create a semi-product like a prepregthat will be further processed to make the final part or to directly manufacture a partfrom dry fiber reinforcement. To design more efficiently and cost effectively andto develop improved composite materials, it is necessary to understand and model
© The Author(s) 2015C. Binetruy et al., Flows in Polymers, Reinforced Polymersand Composites, SpringerBriefs in Applied Sciences and Technology,DOI 10.1007/978-3-319-16757-2_3
109

110 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
several important aspects of composite manufacturing processes. It is the purposeof composite manufacturing science to develop a scientific basis for understandinghow process variables affect final properties of composite parts. The primary goalof composite manufacturing science is to develop the knowledge and engineeringtools to control the manufacturing process to ensure complete and uniform curing orsolidification, minimize chemical and thermal residual stresses, control fiber/resincontent and ensure accurate fiber placement. This requires models that can predictthe influences of key process variables and techniques for monitoring these variablesso that pressure and temperature can be adjusted accordingly. Such models wouldalso provide useful guidelines for tooling design. Modeling and simulation tools forprocesses can speed up the development cycle for new manufacturing processes andinnovative designs.
In this chapter we will focus on flow phenomena in fibrous microstructuresencountered in structural composites, which are viewed as key for ensuring success-ful fabrication. Interested readers can refer to [1, 2, 9] for more detailed informationabout composite manufacturing processes that involve flow of liquid resin withinfibrous microstructures and their modeling.
The fluid flow through the fibrous medium can be viewed as flow through tortuouschannels (also called capillaries). Figure3.1 (right) shows an example of channelsin an assembly of woven fabrics. When the porosity increases, it can be viewed asflow over objects (Fig. 3.1–left) where drag models can be applied.
Most processes for structural composites can be classified as either contact mold-ing using single-sided molds and low pressures, or closed molding using a matchedpair of molds and higher pressure. Contact molding processes include hand lay-up,liquid resin infusion inLCMtechnologies, in or out of autoclavemolding andfilamentwinding. Closed molding processes include Resin Transfer Molding, compressionmolding, and pultrusion.
Accordingly there aremanymaterial forms used in composite structures (Fig. 3.2).The fibers can be continuous or discontinuous, oriented or disoriented (random).They can be found as dry fibers or pre-impregnated with resin (prepreg or premix).
Fig. 3.1 Two cases of flow through fibrous medium: left Flow over isolated fibers (cross-sectionalview) and right Tortuous channels formed by the textile structure (image obtained by X-raytomography)

3.1 Introduction 111
Fig. 3.2 Material/process for structural composites manufacturing
If structural performance is an important design parameter, then continuous rein-forcements are usually selected because discontinuous fibers yield lower mechanicalproperties (Fig. 3.3). Rovings and tows are an unidirectional assembly of continuousfiber. The roving or yarn is the basic material form that can be chopped, transformedby textile operations to create woven, stitched or braided forms or prepregged intoother product forms.
This section provides a brief overview of primary manufacturing techniques thatare currently used to make structural composites, in which flow of resin occurs.Although almost any part can be fabricated by hand layup, this time-consumingand hand labor-intensive process is not considered here because flow phenomenaare controlled by fabrication workers and not by a mechanical device. Indeed, afterseveral dry fabrics have been laid on the tool and resin spread on them, the plies aredebulked by applying pressure to the laminate pile with a roller to remove voids andto ensure that the stacked plies are sufficiently compacted.

112 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
Fig. 3.3 Influence of fiberorientation and length onprocessing and compositeperformance
In autoclave molding, after several plies have been laid (manually or with amachine) on the tool, pressure is applied to the laminate pile to remove voids andto ensure that the stacked plies are sufficiently compacted. Then, the part is baggedand sealed before being cured in an autoclave. The bagging process involves placingmaterials such as peel ply, release fabric, bleeder ply, breather ply, a caul plate, anda flexible heat-resistant membrane over the tool and part. The main challenge is tobleed out some excess resin contained in the laminate before the resin gels. If thebleeding is insufficient, the excess resin degrades final part properties.
Automated Tape Placement (ATP) is the process bywhich plies of compositemate-rial (often carbon fiber reinforced thermoplastic tapes) are laid down with pressureon a tool surface in their proper position by an automated machine. The dispens-ing head is equipped with a heating source (Laser, IR) and a compaction roller todebulk the composite and promote bonding between successive layers. The mainchallenge regarding flow phenomena is to ensure a good polymer healing at theinterface between the former and the new deposited tapes. 3D squeeze flow is therelevant mechanism to study.
In filament winding dry fiber bundles or dry narrow tapes are pulled through aresin bath (wetting stage) and then immediatelywound onto a rotatingmandrel (tool).These impregnated layers are then left to cure. A prepreg roving can also be used inthis process, which eliminates the need for the resin bath. The applications of thisprocess are limited to cylindrical parts such as tubes, pressure vessels and cylinders.
In the pultrusion process, a continuous bundle of dry fiber is pulled through a resinbath to be wetted and then fed into a die where they are subjected to compactionand heating. The cross-sectional shape of the pulled fiber bundles is formed by thesedies. When the assembly of fibers and resin exit the die, they are compacted andcured. This process is limited to straight parts with a constant cross section (beams,frame sections). The main challenge regarding flow phenomena is to understand therelation between axial tension, pulling speed and impregnation quality.
Liquid Composite Molding (LCM) refers those processes that involve infiltrationof a dry fibrous preform with a liquid (low viscosity) polymeric resin. The most

3.1 Introduction 113
popular technique is the Resin Transfer Molding (RTM). In RTM, a low viscositycatalyzed resin matrix is injected into a mold containing a fibrous preform, and heatis then applied to cure the part. The preforming stage, prior to injection, is also aprocess. The preform is usually created by laying up layers of fabric in a preformingtool, either by hand (draping) or by vacuumbagging techniques ormatched-diemolds(preforming). Themain challenge in RTM is to predict the flow pattern, impregnationquality linked to the local saturation of fiber bundles and pressure field. The saturationof a fluid is the volume fraction of the void space filled by that fluid.
There are several variations of this process. A very popular technology for themanufacturing of large parts is called Liquid Resin Infusion (LRI). LRI is very similarto the RTM process except that the resin is drawn into the preform and mold onlywith vacuum pressure. Generally, fiber preform is placed on a single-sided moldand is covered with a flexible membrane and vacuum-sealed. The flow issues to beaddressed in this process include impregnation of the resin inside the fiber preformalong with the progressive decompaction of the fiber preform. Actually during theimpregnation stage, the liquid pressure of the flowing resin balances off some of thecompacting atmospheric pressure thus leading to a dynamic increase of the wettedfabrics. A second variation is Resin Film Infusion (RFI). In RFI, a dry preform isplaced in a mold on top of a solid resin film. Heat and pressure are then appliedso that the resin viscosity decreases and infuses throughout the preform. A thirdvariation isCompression-RTM (CRTM). InCRTM, the impregnation stage comprisesa combination of injection and compression driven flows. Unlike RTM, the mold isnot completely closed during the early stages of the injection, which results in loweroverall fiber volume fraction, and hence a lower global resin flow resistance of thepreform. In the above three variant processes the flow concern to be addressed isthe modeling of the flow in a deformable preform. Difference between all the abovementioned process are essentially in the boundary conditions.
3.2 Description of Fibrous Microstructures in Composites
Microstructure refers to features of internal structure of heterogeneous materialsat a variety of length scales. As far engineered fibrous materials are concerned, theappropriate length scales are those that reveal the partition of thematerial into regionsof nearly continuous phase such as fibers and cluster of fibers called fiber bundles.
Fibrous media with a large number of fibers and inter-fiber volumes cannot bedescribed by considering each of the fibers (view as heterogeneities here) or inter-fiber volumes, which would lead to intractable boundary value problems to solve forthe flow. In addition the geometry of the bounding surfaces at microscale, where theboundary conditions are defined are usually too complex to describe. Then, anothercontinuum approach at a coarser level is required. The classical method is to replacethis heterogeneous medium by a continuous equivalent (also called homogeneous)one, whose description is valid at the macroscopic scale.

114 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
This macroscopic scale is relevant for manufacturing engineers because it is thescale where materials and processing parameters are defined and measured. Thechange of scale from small scale to larger scale is called upscaling. Its aim is todescribe the evolution of a given physical mechanism in a given heterogeneousmediumbyanequivalentmacroscopic continuous behavior. Thederivedmacroscopicbehavior should be intrinsic to the heterogeneous medium and has to be independentof the macroscopic boundary conditions.
This raises the question of the definition of the Representative Volume Element(RVE). Practical limitations in both numerical and real representations ofmicrostruc-ture require studying samples of minimal size that are supposed to represent theoverall material [19].
The RVE is defined as an arbitrary volume chosen large enough to be statisticallyrepresentative of all the physical properties in the vicinity of a point andmuch smallerthan the exterior domain of the porous medium. The average of a physical propertytakenwith respect to theREV represents the property itself at the centroid of theRVE.In other words, it is the smallest region that one can characterize to ensure that therandomly chosen volume fully captures the important features of the microstructure.
The order of magnitude of the RVE is related to the local average porosities andlocal gradients of the average porosities in the considered fibrous medium. Note thatfor non-homogeneous fibrous structures where the spatial variance in the porosity(inter-fiber space) may be quite significant, an upper limit for the RVE is of extremeimportance. Intuitively, since the description of flow phenomena in a fibrous mediumhas to be, inmost cases, at themacroscopic level, the average of each term (takenwithrespect to the RVE) in the microscopic governing equations has to be determined.This intuitive technique is known as volume averaging.
In a recent publication Zhang et al. analyze real engineered fibrous preformswith random clustering of fibers [22]. For such a two-phase heterogeneous fibrousmedium, the size, orientation and distribution of phase clusters are significant to themacroscopic properties. For example, the average size of clusters has influence onthe magnitude of overall property, while the orientation and distribution of clusterscontrol the anisotropy. The weighted influence of each phase at any location canbe represented by the volume fraction and clusters, while the directional cluster-ing effect may lead to anisotropy. For this type of fibrous material with large scalerandomness with spatial correlation, the statistical continuum approach can be usedwith 2-point statistics [19]. It consists in deriving the up-scaled property from thegoverning constitutive relationship with the fluctuation of local property incorpo-rated. Actually 2-point statistics may be inserted naturally into averaging schemesby virtue of the ergodic assumption introduced hereafter [11]. Relations are derivedthrough perturbation expansions where the Green’s function solution are used toprovide a link between terms of the series expansion and correlation functions thatcontain different orders of geometrical information. Since the effective coefficientsare defined by the local correlation functions, it was concluded that probability func-tions play a critical role in describing the statistical distribution of different phasesin this heterogeneous fibrous medium [22].

3.2 Description of Fibrous Microstructures in Composites 115
Due to some long-range heterogeneity in engineered fabrics, the defined RVEsize may be too large for numerical analysis or experimental characterization. Thusa smaller region, often named a statistical volume element (SVE), is used instead.The overall fibrous structure statistics or response is then determined by ensembleaveraging over a set of SVEs. The size of this set must be large enough to fullysample the fibrous material characteristics. When using SVEs rather than RVE, onegenerally employs the ergodic hypothesis. This mathematical principle assumes thatthe ensemble average of integrals taken over a large number of SVEs is equivalentto an integral over a single large RVE.
The volume fraction occupied by voids or polymer, i.e., the total void/polymervolume divided by the total volume occupied by the fibers and void/polymer volumes,is called the porosity. In fibrous media each void is connected to more than one otherpore, pores are always interconnected and fluid flow is always possible through theinterconnected pores. Finally, the voids are usually non-uniform in their size and intheir distribution.
3.2.1 Monodisperse Porosity Medium
Themonodisperse porosity distribution is rigorously encountered in fibrous compos-ites in two cases: in pure unidirectional (UD) fabrics and in fiber bundle (or rovings).The Chopped Strand Mat (CSM), which is manufactured by random distribution ofchopped strands of glass fiber (usually 10–100 mm in length) into a uniform mat,has a porous structure close to be monodisperse. Compared to pure UD fabrics orbidirectional (BD) fabrics composed of orthogonal yarns, the complexity of the CSMlies in the random microstructure containing irregular pores with a large distribu-tion of density, size and form. Although the porous structure appears highly randomand disordered, the statistical properties, such as the distribution of pore sizes andshapes, the degree of correlation and the interconnectivity of pores, govern the flowprocess and the macroscopic material properties. Therefore, accurate prediction offlow properties depends on appropriate description and representation of the randommicrostructure.
The microstructure depicted in Fig. 3.4 represents the cross-section of UD arrayof fibers in polymer composites. It is an unidirectional array of discrete cylindri-cal solids. It is random in the ensemble sense, and then the mesoscale response ofthis microstructure subjected to a given physics is statistical, but tends to becomedeterministic as the scale separation LM/lm grows. If we take the fibrous mediumas a set F = (F(ω);ω ∈ Ω), defined over the sample space Ω then for an eventω ∈ Ω , we get a realization F(ω) of infinite extension. However, for practical reasonalready mentioned, a mesoscale sub-domain of finite size Lm is cut out to computethe response of a given flow. The question is to know whether this sub-domain islarge enough to get an intrinsic response, i.e. independent on the location of themesoscale sub-domain. If yes, this sub-domain is a RVE of the microstructure. Ifthis property is not verified, the flow response is said apparent. As a consequence, for

116 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
Fig. 3.4 Spherical RVE,characteristic lengths anddifferent interfaces in amonodisperse fibrousmedium
Lm
lm
Sff
Sss
Sfs
fibrous material with large scale randomness with spatial correlation, the RVE canbe several order bigger than the size of the microscale heterogeneity. If the ergodichypothesis holds, it is acceptable to replace analysis (averaging) over a large enoughRVE by the analysis (ensemble average) over a large number of sub-domains.
In practice, since this microstructure is discrete and almost always measureddigitally on a discrete grid of spatial locations, local material state descriptors arediscrete. The random microstructure can be described by a phase function (alsoindicator function) Xi(x). It is used to identify a random point x, located inside oroutside of phase i:
Xi(x) =⎧⎨⎩1 if x lies in phase i
0 otherwise. (3.1)
By definition volume fraction for phase i (here phases are fiber and inter-fibervolumes), Vi, is the one-point probability function (also called one-point correla-tion function ) Vi = P(Xi(x) = 1) if the material is statistically homogenous. If thematerial is not statistically homogenous then the one-point probability function canbe interpreted as a position dependent volume fraction.
Volume fraction alone cannot capture thewhole complexity ofmorphology in ran-dom heterogeneous fibrous media when studying effective properties. More detailsof the shape, orientation distribution andmorphology of themicrostructure includingthe spatial correlation of the components in themedia should be considered in order togive an accurate prediction of effective properties. This can only be realized by usinghigher order distribution functions. The statistical details of a heterogeneous fibrousmedium can be represented by an n-point probability distribution function (PDF).Volume fraction, commonly used to capture the complexity of a microstructure, isactually one-point probability distribution function.

3.2 Description of Fibrous Microstructures in Composites 117
The n-point probability function is defined as the probability of n points existing ina certain combination of phases [19]. For a two-phase heterogeneous fibrousmedium,the size, orientation and distribution of phase clusters are significant to the effectiveor macroscopic properties. Obviously, the average size of clusters influences theoverall property magnitude, while the orientation and distribution of clusters controlthe anisotropy. As such information is not contained in the one-point probabilityfunction, the two-point probability function has to be considered.
For any two points x and x′ in a domain composed of two phases Xi(i = 0, 1), thetwo-point probability function Pi j (x, x′) is the probability of the vector x − x′ withits head x ∈ Xi and tail x′ ∈ Xj (i, j = 0, 1). For the sake of convenience, the one-dimensional Pi j (x, x ′) for different orientation θ(0 ≤ θ < π) can be used instead.If the medium is isotropic, Pi j (x, x ′) is identical for any value of θ . For a given θ ,if the material is statistically homogenous then the function should only depend onthe relative positions and not on the absolute position, Pi j (x, x ′) is a function of thedistance r = |x − x ′|. Using a given two-phase medium, Pi j (x, x ′) is evaluated byaccumulating the number of events of each group at a certain distance r . Finally, thecondition ∑
i, j=0,1
Pi j (r) = 1, (3.2)
is imposed to normalize Pi j (r)(i, j = 0, 1).In practice it is often assumed that the ergodic hypothesis holds and it is acceptable
to replace averaging over the ensemble with averaging over a large enough volume.It can be shown that
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
Pi j (r → ∞) = pi p j
Pii (r → ∞) = p2i = Vi2
Pii (r → 0) = pi = Vi
, (3.3)
and
d Pii
dr(r → 0) =
⎧⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎩
− Siv2 , d = 1
− Siv
π, d = 2
− Siv4 , d = 3
, (3.4)
where d is the dimension of the space, pi and p j are respectively the one-pointprobability function of phases Xi and Xj, and Si
v is the specific surface or interfacearea per unit volume associated to phase i. The specific surface area is defined asthe ratio of the internal surface area of the voids over the bulk volume of the porousmedium.

118 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
Fig. 3.5 a Two-phase sampling region; b Two-point probability function in the x-direction andc two-point probability function in the y-direction (solid curves real data; dotted line fitted analyticalmodel)
Figure3.5a shows a sampling of a two-phase heterogeneous material. The phasedistribution is analyzed using the two-point probability function Pi j . The corre-sponding values of the Pi j are reported in graphs 3.5b, c for the x and y directionsrespectively (solid lines). The dotted lines are a fitted analytical model.
There is a large body of literature devoted to possible definitions of the RVE forheterogeneous media. Generally speaking, the RVE size is considered as function ofmany parameters, e.g. sample size, allowable error, the property of interest, etc. Ageneric definition of RVE size is proposed in [10, 11]. Consider a random functionQ(x) as a mapping from the phase function Xi(x) to a phase property. Q(x) can bethe fiber volume fraction field
Q(x) = V(x) = Vi x ∈ Xi, (3.5)
and the permeability field:
D(x) = k(x) = ki x ∈ Xi, (3.6)

3.2 Description of Fibrous Microstructures in Composites 119
where Vi the volume fraction associated to phase Xi and ki is the phase permeability.The point variance of the random process Q(x) is defined as [10]
D2k = p0 p1(Q0 − Q1)
2, (3.7)
where pi and Qi denote the one-point PDF and the phase property (Vi or ki ). Inaddition, an integral range, An , is defined forQ(x) as [16]
Ad = 1
C(Q, 0) − C(Q, 0)2
∫Rd
(C(Q, r) − C(Q, 0)2) dr, (3.8)
where d denotes the dimension of space, C(Q, r) is the covariance function with thesame meaning as the two-point PDF P00(r) or P11(r) (depending on the phase inconsideration) with r as the lag distance. Based on the framework of [13], the lengthof RVE (L RV E ) for a given relative error ε (i.e. ratio of the absolute error to the meanvalue K ) and number of realizations (N ) can be derived as [10]
L RV E = 4D2k Ad
ε2K2
N. (3.9)
Assuming the statistics of the fibrous medium properties are statistically homo-geneous and mean is ergodic, then the ensemble average equals the spatial average.
Q(ω) ≡ limV →Rd1
V
∫Q(x, ω)dx =
∫Ω
Q(x, ω)d P(ω) ≡ 〈Q(x)〉. (3.10)
3.2.2 Bidisperse Porosity Medium
Fabrics used as reinforcement in structural composites are usuallymade of assembledfiber tows. As a consequence, fabrics have a dual-scale porous medium (two-phasefibrous medium), i.e. porosity structure is composed of mesoscopic gaps betweenfiber tows and microscopic pores between fibers inside each tow. The meso-volumesoffer low flow resistance compared to the fiber tow with high flow resistance.
When the resin flows at a high velocity, i.e. when the pressure gradient in thevicinity of the flow front is the dominant driving forces compared to capillary pressureat the front, the microscopic pores are difficult to saturate due to the high resistanceinside the bundle, and air can be entrapped inside the bundles [6–8, 12, 16, 17]. Onthe contrary, at a low flow speed, due to the relative stronger capillary force insidethe tow, flow front direction is distorted and may form a void between fiber tows.Both themacroscopic dry spots andmicro-voids are detrimental to the strength of thecomposite parts, and the reduction of these defects in processing is a main objectiveof manufacturing engineers. Thus, it is evident that the dual-scale flow is a localphenomenon highly dependent of the fibrous microstructure.

120 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
Fig. 3.6 Dual scale porosity distribution in a woven composite: left cross section of a wovencomposite; right extraction of the meso-porosity
Anexample of such a porous structure is shown inFig. 3.6 (left). It is a cross sectionof a composite laminate made of unbalanced woven fabrics. The darkest regions arethe meso-volumes (volumes between fiber tows), while the grey scale zones arefiber bundles containing the micro-volumes. Figure3.6 (right) shows an extractionof the meso-volumes from images obtained by X-ray tomography. It demonstratesthe complex morphology of the meso-volumes. One can notice some isolated meso-volumes, however then cannot be considered as dead-end pores since meso-volumesare always connected to micro-volumes.
Fiber bundles can be viewed as cluster of fibers and meso-volumes as channelsbetween fiber bundles, as depicted in Fig. 3.7. The characteristic length of the poreswithin the tows (∼10µm) is typically one to two order of magnitude smaller than thesize of pores (meso-volumes) outside tows. For such a two-phase fibrousmedium, thesize, orientation and distribution of phase clusters are significant to the macroscopic
LM
Lm
Averaging volume
Inter-tow volume
lm
Close-up
St
nt
Fig. 3.7 Characteristic lengths in a fibrousmediumwith a bidisperse porosity and averaging volumeused to upscale the flow variables. Close-up view of the inter-tow/tow boundary

3.2 Description of Fibrous Microstructures in Composites 121
microscale mesoscale macroscale
Fig. 3.8 Three scales associated to a bidisperse porosity medium. left microscopic view, centermesoscopic view where tows are considered as continuum media, right macroscopic view wherethe fabric is considered as a homogeneous porous material
properties. For example, the average size of clusters has influence on the magnitudeof overall property, while the orientation and distribution of clusters control theanisotropy. All this information can be described by the N -point probability function,defined as the probability of N points existing in a certain combination of the two-phase porous medium. As the clustering effect and anisotropy cannot be accountedfor by the one-point PDF, the two-point PDF should be considered.
As it will be seen later in the next section, the mass and momentum balanceequations are usually derived at the mesoscopic scale, i.e. the microscopic flowwithin the tows is not considered in detail. The averaging volume encompasses boththe fibrous tows and inter-tow volumes (Fig. 3.8).
3.3 Governing Equations for Flows in Porous Media
The macroscale perspective was introduced in the previous sections with the motiva-tion to get macroscale variables helpful for manufacturing engineers. The definitionof the macroscale physical quantities must not be just a mathematical construct forconvenience but must also be a quantity that is generally measurable at the macro-scopic level.
This section starts with the microscale description of the mass and momentumbalance equations. Thenwewill present how to transform themass balance equationsin terms of microscale variables to mass and momentum balance equations in termsof macroscale variables. This transformation will be accomplished by averaging thepoint microscale conservation equation over a REV. This procedure also involvesaveraging of the time and space derivatives of those physical quantities. Therefore,additional tools needed to facilitate the transformation to the macroscale will beintroduced; the divergence and transport theorems that convert the average of aderivative to a derivative of the average.

122 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
3.3.1 Pore-Scale Isothermal Flow Description
• Continuity equation (microscopic mass balance equation)The equation of conservation for the fluid valid at all points in the fluid is
∂ρf
∂t+ ∇ · (ρfvf) = 0. (3.11)
This equation describes the conservation of total mass at a microscale point [20].The first term accounts for the rate of change of mass at the point while the secondterm is the net outward flow of mass per unit time from the point. In particular forincompressible fluid with constant density this equations simplifies in
∇ · vf = 0. (3.12)
• The momentum equation given for an incompressible and Newtonian fluid is theNavier-Stokes that writes
∂(ρfvf)∂t
+ ∇ · (ρvfvf) = ∇ · σ + ρg, (3.13)
where σ is the second-order total stress tensor and g is the field of the externalforces per unit mass. σ = −pI + τ for an incompressible and Newtonian fluid andτ = 2ηD, where D is the deformation rate tensor.
3.3.2 Macroscopic Scale: Upscaling
Upscaling techniques are continuous approaches that allow the derivation of an equiv-alent macroscopic continuous description from the description at the REV scale.There are essentially two methods to up-scale flow equations valid at the microscaleto equations valid at the larger scale: multiscale homogenization and volume averag-ing. Homogenization methods can derive for coefficients in the up-scaled equations,whereas volume averaging methods give the form of the up-scaled equations butgenerally must be accompanied with physical arguments to determine some coef-ficients (see for instance [18] for the introduction of the notion of permeability inmacroscale momentum equation). This is due to the complexity of the flow pathsand the interpore and pore-to-pore fluid dynamic interactions.
Homogenization is often performed on periodic models, while volume averagingdoes not require any assumption of periodicity and therefore is close to the realityof fibrous materials. As previously seen, other methods can take the details of thespatial statistics of some complex fibrous media directly into account, or provideadditional information about important corrections to the average equations.

3.3 Governing Equations for Flows in Porous Media 123
The averaging theorem is based on Green’s theorem and the divergence theoremand supposes that in relatively small regions volume averages of spatial gradients instatistically homogeneousmedia are close to gradients of volume averages. However,looking at the typical double-scale porosity medium in Fig. 3.7, great care has to betaken to calculate averaged quantities at the tow/inter-tow interface where abruptchanges occur. We could be tempted to use small averaging volumes to better cap-ture transitions in rapidly changing microstructure. However a too small averagingvolume implies rapid fluctuations in the quantities of interest (like the fluid velocity).On the contrary, a too large averaging volume will smooth out the effects of localinhomogeneities and the coefficients in the equations will tend to be constant. Thenthe average quantities are functions of the particular choice of averaging volume.
Now let Ψ represent any physical quantity that has a value at each point. Ingeneral, Ψ can be a scalar, a spatial vector, or a second-order tensor. The spatialaverage, denoted by angle brackets is defined as
〈Ψ 〉 = 1
V
∫
V
Ψ dV . (3.14)
Using this definition, the volume fraction of both solid (s) and fluid (f) phases arerespectively
φf = Vf
V= 1
V
∫
V
Xf dV, (3.15)
and
φs = Vs
V= 1
V
∫
V
Xs dV, (3.16)
where volume fraction of the fluid φf is the porosity of the fibrous medium when notimpregnated yet.
The phase average of a physical quantity related to the fluid phase with respect toa REV is given by
〈Ψf 〉 = 1
V
∫
V
Ψ Xf dV = 1
V
∫
Vf
Ψf dV . (3.17)
The phase average of the interstitial velocity (within the pores) with respect toa REV is called superficial velocity and corresponds to the Darcy velocity. It is theaverage velocity determined by measuring the volumetric flow rate and dividing itby the cross-sectional area of the total domain. This velocity is also referred to asthe filter velocity or the specific discharge.

124 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
The intrinsic phase average a physical quantity is defined as
〈Ψf 〉f = 1
Vf
∫
Vf
Ψf dV =
∫
V
Ψ Xf dV
∫
V
Xf dV. (3.18)
The phase and intrinsic averages are related by:
φf〈Ψf 〉f = 〈Ψf 〉. (3.19)
In order to locally average theNavier-Stokes andmass balance equations, the aver-age of a gradient (or divergence) must be replaced with the gradient (or divergence)of an average. Then, the macroscopic balance equations for mass and momentumare derived by taking the term-wise average of the corresponding balance equations.To do so, two useful relationships needed are given here.
• The general transport theorem,which is the general formof theReynolds’ transporttheorem, states that
d
dt
∫
V (t)
Ψ dV =∫
V (t)
∂Ψ
∂tdV +
∫
S(t)
Ψ v · n dS, (3.20)
where Ψ is a function with a continuous first derivative in time within the volume,v is the velocity of the surface S(t) which encompasses the volume of interest V(t)and n is the unit vector perpendicular to S(t) oriented to be positive outward fromthe volume. The velocity v can be different than the fluid velocity. When thesetwo velocities are the same, then the general and Reynolds’ transport theoremsare identical. Physically this equation states that a rate of change of the integralof a quantity over a volume is related to the change in the value of the quantity inthe volume and any change in the size of the volume due to the movement of itsboundaries (due to expansion or contraction of the volume).In particular, applying this theorem to the phase function shows that the partialderivative of the fluid volume fraction respect to time is
∂φf
∂t= 1
V
∫
Sfs
vf · n dS, (3.21)
where Sfs is the interfacial area between fluid and solid phases within the averagingvolume V .
• The second relationship is the divergence theorem (the Green’s transformation),which states that

3.3 Governing Equations for Flows in Porous Media 125
∫
V (t)
∇ · Ψ dV =∫
S(t)
Ψ v · n dS. (3.22)
The theorem for the volume average of a gradient reads
〈∇Ψ 〉 = ∇〈Ψ 〉 + 1
V
∫
Sfs
Ψ nfsdS, (3.23)
where nfs is the unit normal to that surface, directed from the fluid towards the solid.We can express the gradient of the volume fraction in terms of an integral over
the fluid/solid interface.
∇φf = − 1
V
∫
Sfs
nfs dS. (3.24)
A similar relation can easily be developed for vector and tensor quantities, referredto as the theorem for the volume average of a divergence:
〈∇ · Ψ 〉 = ∇ · 〈Ψ 〉 + 1
V
∫
Sfs
Ψ · nfs dS. (3.25)
The temporal averaging theorem relates the average of the partial time derivativeof a microscale quantity to the partial time derivative of an averaged macroscalequantity ⟨
∂Ψ
∂t
⟩= ∂
∂t〈Ψ 〉, (3.26)
where the scalar Ψ can be replaced by a vector or a second-order tensor.
3.3.2.1 Macroscopic Mass Balance Equation
For the fluid flowing between fibers, the mass balance equation at each point is givenby the equation
∇ · v = 0. (3.27)
Taking the volume (phase) average of this equation gives for a single-scale poros-ity medium with a stationary solid phase the macroscopic mass balance equation
∇ · 〈v〉 = 0. (3.28)

126 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
Now, considering fibrous medium featuring a double-scale porosity structure asdepicted in Fig. 3.7, the mass balance equation is derived at the mesoscopic scale,i.e. the microscopic flow within the tows is not considered in detail. The averagingvolume encompasses both the fibrous tows and inter-tow volumes (Figs. 3.7 and 3.8).The volume (phase) average of Eq. (3.27) for an incompressible fluid flowing in theinter-tow volumes is
∇ · 〈vit〉 = − 1
V
∫
St
vit · nt dS, (3.29)
where vit is the fluid velocity in the inter-towvolumes and St the tows/fluid interphase.The right-hand side of Eq. (3.29) represents the rate per unit volume of resin
absorption by the tows bounding the inter-tow volumes. This term is generallyreferred to as the sink term Stow in the macroscopic mass balance equation. Then,using this definition, Eq. (3.29) can be rewritten as
∇ · 〈vit〉 = Stow, (3.30)
where the sink term is by definition
Stow = − 1
V
∫
St
vit · nt dS. (3.31)
Equation (3.29) shows that the flow in the inter-tow region slows down becauseof the absorption of resin by the tows, as long as tows are not completely filled up.This transition zone where the fluid is impregnating the tows is generally referred toas the unsaturated region of the fibrous medium.
3.3.2.2 Macroscopic Momentum Balance Equation
The microscopic momentum balance equation for the fluid flowing between fibers is
∂(ρv)
∂t+ ∇ · (ρvv) = ∇ · σ + ρg, (3.32)
where σ is the total stress tensor and g represents the body force per unit mass.Assuming the solid does not move and that there is no exchange ofmatter between
the fluid and fibers, the volume (phase) average of Eq. (3.32) is obtained by applyingthe averaging theorem
∂〈ρfvf 〉∂t
+ ∇ · 〈ρfvfvf 〉 = ∇ · 〈σf 〉 + 〈ρfg〉 + 1
V
∫Sfs
σf · nfs dS. (3.33)

3.3 Governing Equations for Flows in Porous Media 127
Now assuming that the following conditions apply: (i) Constant density, (ii) New-tonian fluid, (iii) Fully saturated medium, (iv) No surface tension between the fluidand the solid, (v) Porosity is uniform in space (no gradient of porosity) and (vi)Isothermal conditions; then the volume-averaged macroscopic momentum equationwrites
∂〈ρfvf 〉∂t
+ ∇ · 〈ρfvfvf 〉 = φf∇〈Pf 〉 f + ∇ · 〈τf 〉 − fd, (3.34)
where τf is the extra stress tensor (also called deviatoric fluid stress tensor), definedfor a Newtonian fluid of constant viscosity η by
τf = η[∇vf + (∇vf)T
]= 2ηDf , (3.35)
where the superscript T indicates a tensor transpose and fd is the fluid-solid dragforce defined as
fd = − 1
V
∫
Sfs
σf · nfs dS + 1
V
∫
Sfs
ρfghnfsds + 〈Pf 〉f 1V
∫
Sfs
nfsdS. (3.36)
The first integral in the right-hand side of Eq. (3.36) represents the total forceper unit volume (other than those associated with hydrostatic and ambient pressures)exerted by the fluid on fibers or pore walls. This force is associated to the movingfluid, whereas a hydrostatic pressure produces no relative motion between fiber andfluid.
The second integral is the force per unit volume exerted on the fiber-tow by apressure gradient due to the gravity effect in the fluid. The third integral representsthe force exerted on the fiber tow due to the average intrinsic liquid pressure. Withthe help of Eq. (3.24), this third integral can be expressed
− 〈Pf 〉f 1V
∫
Sfs
nfsdS = ∇φf 〈Pf 〉f . (3.37)
When a gradient of porosity (or fiber volume fraction) exists at the scale of theRVE, then a uniform pressure in the fluid will produce of force on the fiber tows pro-portional to the intrinsic average fluid pressure. This hydrostatic force is antiparallelto the vector ∇φf . If the fibrous preform is homogeneous at the scale of the RVE,then the integral in Eq. (3.37) equals to zero.
In most of composite manufacturing processes gravity effect can be neglected,the macroscopic fluid-solid drag force reduces to the force associated to the movingfluid
fd = − 1
V
∫
Sfs
σf · nfs dS. (3.38)

128 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
3.4 Flow of Simple Fluids in Non-deformable FibrousMicrostructures
For highly compacted array of fibers, the porosity does not change in the presence ofa pressure gradient and the fibrous medium is then stationary. In deformable fibrousmedia the porosity depends on the pressure from the mechanical properties of thefiber bed.
3.4.1 Negligible Inertia and Single-Scale Porosity Medium
Formost of manufacturing processes of structural composites, the Reynolds’ numberRe < 1, the flow of polymer is a creeping-flow regime, also called Darcy regime.Then viscous forces dominate over the inertia forces and only the local (pore-level)geometry influences the flow. Then the left-hand side of Eq. (3.34) can be neglected,giving the macroscopic momentum equation
− φf∇〈Pf 〉f + ∇ · 〈τf 〉 − fd = 0. (3.39)
For a Newtonian fluid of constant viscosity η, the extra stress tensor τf is definedin Eq. (3.35). With the help of the averaging theorem, the volume average of ∇vfgives
〈∇vf 〉 = ∇〈vf 〉 + 1
V
∫
Sfs
vfnfs dS. (3.40)
If fibers do not move and the fluid does not slip at the fiber wall, the integral inEq. (3.40) vanishes. Then the volume average of the extra stress is simply expressedby the gradient of the average velocity
〈τf 〉 = η
[∇〈vf 〉 + (∇〈vf 〉)T
]. (3.41)
Taking the divergence of Eq. (3.41) it results
∇ · 〈τf 〉 = η
[∇ · ∇〈vf 〉 + ∇ · (∇〈vf 〉)T
]. (3.42)
Knowing that
∇ · (∇〈vf 〉)T = ∇(∇ · 〈vf 〉), (3.43)

3.4 Flow of Simple Fluids in Non-deformable Fibrous Microstructures 129
and using the incompressibility condition in Eq. (3.28), it comes
∇ · 〈τf 〉 = η∇ · ∇〈vf 〉 = η∇2〈vf 〉. (3.44)
Finally, the difficulty is in relating the fluid-solid drag force to the fluid velocity(relative to the fiber) and the geometrical properties of the fibrous medium. Usingdimensional analysis, it has been seen the drag force can be written as [18]
fd = φfη
K〈vf 〉, (3.45)
where K is the rank two intrinsic permeability tensor of the fibrous medium. Thepermeability is an average medium property that measures the ability of the porousmedium to transmit fluid. The components depend on the physical system as well asthe orientation of the porous structure relative to the coordinate system. The tensorcomponent Kij is the intrinsic permeability that allows for flow to take place incoordinate direction i as a result of a pressure gradient in coordinate direction j.When the coordinate directions are aligned with the principal directions of flow, theoff-diagonal components of the intrinsic permeability tensor are zero.
Within the frame of the above assumptions, it can be proved that permeability isdetermined only by the geometry of the porous phase and not by the fluid properties.These assumptions are recalled here: (i) Constant density, (ii) Newtonian fluid, (iii)Fully saturated medium, (iv) No surface tension between the fluid and the solid, (v)Porosity is uniform in space (no gradient of porosity), (vi) Isothermal conditions,(vii) Laminar flow and (viii) Stationary fibrous medium.
Dimensional analysis shows that permeability has the unit of m2 and permeabilityreflects both the magnitude and anisotropy of the fluid/fiber resistance. The morecontact a fluid has with the fiber surface of the porous medium, the more resistanceto flow it will encounter.
Inserting Eqs. (3.44) and (3.45) into Eq. (3.39) gives the Brinkman’s equation
− φf∇〈Pf 〉f + η∇2〈vf 〉 − φfηK−1 · 〈vf 〉 = 0. (3.46)
The second term of this equation is the Stokes term and is expected to be significant inareas of large averaged velocity gradients. In a typical single-scale porosity mediumdefined in Fig. 3.4, an order-of-magnitude analysis shows that this term becomesnegligiblewith respect to thefluid-solid drag force. Then themacroscopicmomentumbalance equation reduces to
〈vf 〉 = −Kη
· ∇〈Pf 〉f . (3.47)
This equation is known as the Darcy equation. If the fibrous medium is isotropic,the permeability tensor K reduces to a scalar value K. Note that Darcy’s velocity is asuperficial velocity and not the interstitial velocity at which the fluid moves between

130 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
microscale macroscale
∂ω
ω Ω
Fig. 3.9 Microscopic view of a unidirectional fiber array and the macroscopic homogenized struc-ture
fibers. Then Darcy’s velocity is not a true velocity of the fluid but represents aneffective flow rate through the porous medium. Chemical species carried with theflow move only in the pores and thus are transported relative to the fiber phase at anaverage pore velocity 〈vf 〉f .
The interstitial velocity 〈vf 〉f is deduced by combining Eq. (3.19) and the Darcyequation (3.47)
〈vf 〉f = − Kηφf
· ∇〈Pf 〉f . (3.48)
Combining Darcy’s equation with the incompressibility condition allows to elim-inate the velocity to get the pressure equation
∇ ·[
Kη
· ∇〈Pf 〉f]
= 0. (3.49)
In practice Eq. (3.49) is first solved to get the pressure field, then pressure gradientsare computed and substituted into Eq. (3.47) to find the velocities.
Beyond dimensional analysis used historically to show that permeability is ageometrical parameter attached to porous structure, some theoretical arguments canbe provided on the basis of the theory of homogenization to prove this result. Inaddition, the following shows that the computation of pressure is not required topredict the permeability of a fibrous medium.
Without loss of generality, let’s consider the fibrous microstructure depicted inFig. 3.9.
The total power dissipated by friction is
Pmicro =∫
ω
σ : ∇vf dx, (3.50)

3.4 Flow of Simple Fluids in Non-deformable Fibrous Microstructures 131
that can be rewritten taking into account the linear momentum balance ∇ · σ = 0and applying the divergence theorem
Pmicro =∫
∂ω
vf · (σf · n) dx, (3.51)
where ∂ω is the boundary of the microscale domain ω. The power dissipation cal-culated at the microscale must be equal to the power dissipation obtained from thevolume integration over that element. Then the dissipated power Pmacro reads
Pmacro = |ω|∇〈Pf 〉f · 〈vf 〉, (3.52)
and by enforcing the equality of both dissipated powers it results
〈σf : Df 〉|ω| = |ω|∇〈Pf 〉f · 〈vf 〉, (3.53)
where Df is the symmetric component of the velocity gradient
Df = 1
2(∇vf + (∇vf)T ). (3.54)
The fluid being incompressible, the total fluid stress reduces to the extra stresstensor, then Eq. (3.53) simplifies in
〈τf : Df 〉 = ∇〈Pf 〉f · 〈vf 〉. (3.55)
Replacing the extra stress tensor by its definition in Eq. (3.35), Eq. (3.55) can berewritten as
〈2ηDf : Df 〉 = ∇〈Pf 〉f · 〈vf 〉. (3.56)
Using Darcy’s law in Eq. (3.47) to eliminate the pressure gradient term in theRHS of Eq. (3.56) it comes
2η〈Df : Df 〉 = η〈vf 〉T · K−1 · 〈vf 〉. (3.57)
Introducing Eq. (3.54) in the LHS of Eq. (3.57) and developing the contractionproduct
〈Df : Df 〉 = 〈Di j · Di j 〉 = 1
4〈(vi, j + v j,i ) · (vi, j + v j,i )〉
= 1
4〈vi, j · vi, j + vi, j · v j,i + v j,i · vi, j + v j,i · v j,i 〉, (3.58)

132 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
where the subscript f in the components Di j is dropped for the sake of clarity. Wenote 〈vf 〉 = V .
It can be shown that 〈vf 〉 and vf are continuous and that the transformation of theaverage velocity into the local velocity is possible through the localization tensor Ldefined by
vf = L · 〈vf 〉 = L · V. (3.59)
This closure relation is often used to relate the deviations at the microscale to theaveraged quantities. Thus the local fluid velocity is a linear vector function of theaverage velocity. Then, the velocity components are related by
vi = Lik · Vk . (3.60)
Developing the products of Eq. (3.58)⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
vi, j · vi, j = (Lik, j · Vk) · (Lim, j · Vm) = Ukm · Vk · Vm
vi, j · v j,i = (Lik, j · Vk) · (L jm,i · Vm) = Wkm · Vk · Vm
v j,i · vi, j = (L jk,i · Vk) · (Lim, j · Vm) = Ykm · Vk · Vm
v j,i · v j,i = (L jk,i · Vk) · (L jm,i · Vm) = Zkm · Vk · Vm
(3.61)
Then Eq. (3.57) can be rewritten as
1
2ηVT · 〈U + W + Y + Z〉 · V = ηVT · K−1 · V, (3.62)
fromwhich the inverse of themacroscopic permeability tensor can be identifiedwhenenforcing that powers equality applies for any velocity V:
K−1 = 1
2〈U + W + Y + Z〉. (3.63)
Equation (3.63) shows the permeability only depends on the geometrical micro-structural features through the localization tensor components U, W, Y and Z andreflects both the magnitude and anisotropy of the fluid/fiber resistance.
3.4.2 Negligible Inertia and Double-Scale Porosity Medium
In the double scale porosity medium depicted in Fig. 3.7, the two interconnectedphases considered are the fiber tows and the inter-tow volumes. They exhibit verydistinct porous networks that can exchange fluid mass between them in a short-termrange [3, 4, 14, 15].

3.4 Flow of Simple Fluids in Non-deformable Fibrous Microstructures 133
The fiber tows play the role of the solid fiber in the single scale porosity medium.We still assume fibers do not move and that the fluid does not slip at the fiber wall.However the no-slip boundary condition at the surface of the tows is not applicablebecause the fluid can flow inside the tows. Then the integral in Eq. (3.40) does notvanish. This latter represents the rate per unit volume of fluid absorption by the tows,whose definition given in Eqs. (3.30) and (3.31) is recalled here
∇ · 〈vit〉 = − 1
V
∫
St
vit · nt dS = −Stow. (3.64)
To express the average viscous stress 〈τit〉 defined in Eq. (3.41), the transpose ofthe average velocity gradient is first expressed
〈∇vit〉T = (∇〈vit〉)T + 1
V
∫
St
ntvitdS. (3.65)
It comes
∇ · 〈τit〉 = η
[∇ · ∇〈vit〉 + ∇ · (∇〈vit〉)T + 1
V∇ ·
∫
St
(vitnt + ntvit)dS
]. (3.66)
Using the equality in Eq. (3.43) and the definition of the sink term in Eq. (3.64),we get
∇ · (∇〈vit〉)T = ∇(∇ · 〈vit〉) = −∇Stow. (3.67)
Then, Eq. (3.66) can be written as
∇ · 〈τit〉 = η
[∇2〈vit〉 − ∇Stow + 1
V∇ ·
∫
St
(vitnt + ntvit)dS
], (3.68)
or equivalently
∇ · 〈τit〉 = η
[∇2〈vit〉 + 1
V∇ ·
∫
St
[vitnt + ntvit − (vit · nt)I]dS
], (3.69)
where I is the unit tensor.The second member of the RHS of Eq. (3.69) represents the resulting force acting
on the fiber tows due to the non-zero velocity on the tow surface. It is expected to besignificant near the flow front where the normal component of the inter-tow velocityis important as a result of the tow impregnation mechanism. When fiber tows are

134 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
fully impregnated, i.e. behind the flow front region, this second member tends tozero. As a result Eq. (3.69) reduces to
∇ · 〈τit〉 = η∇2〈vit〉, (3.70)
which is identical to the expression inEq. (3.44) for the single-scale porositymedium.Substituting expressions for the average viscous resistance, Eq. (3.69) and viscous
drag, Eq. (3.45), into the macroscopic momentum balance equation (3.39) gives
−φit∇〈Pit〉it+η
[∇2〈vit〉+ 1
V∇·
∫
St
[vitnt+ntvit−(vit·nt)I
]dS
]−φitηK−1·〈vit〉 = 0,
(3.71)where φit is the inter-tow porosity defined as the ratio of inter-tow volume over thetotal averaging volume.
This expression is the equivalent of the Brinkman equation for a single-scaleporosity medium, extended here to the case where the tow saturation process occurs.
3.4.3 Fluid Inertia
It is generally believed that Darcy’s law is applicable as long as the Reynolds numberRe< 1. This is the flow regime inwhich viscous forces are predominant. Re is definedin terms of a characteristic length of the porous medium in which fluid flow occurs.√
K is usually used as the characteristic length. Using permeability as the lengthscale, Re is given by
Re = ρfV√
K
η. (3.72)
Beyond Re = 1, there is a transition zone in which inertial forces begin to besignificant and eventually predominant. If the velocity of a fluid flowing in a porousmedium is high enough, Darcy’s law breaks down. Then one must add some correc-tion terms to the basic Darcy law in order to take into account the effect of inertia.The Forchheimer’s equation adds a term that is proportional to the square of the fluidvelocity to account for the extra pressure drop at higher Reynolds numbers
− ∂
∂x〈Pf 〉f = η
Kx〈vf 〉 + ρfb√
Kx〈vf 〉||〈vf 〉||, (3.73)
where b is a constant, ||〈vf 〉|| is the norm of the volume average fluid velocity andand x is the direction of macroscopic flow. The dependence of the parameter b onthe porous media characteristics has been studied in granular media, for instance toobtain the Ergun’s equation

3.4 Flow of Simple Fluids in Non-deformable Fibrous Microstructures 135
− ∂
∂x〈Pf 〉f = c1(1 − φf)
2η
φ3f d2
p〈vx 〉 + c2ρf(1 − φf)
φ3f dp
〈vx 〉2, (3.74)
where dp is the average particle diameter, c1 and c2 are constants. The first term in theRHS of Eq. (3.74) is the Blake-Kozeny-Carman model for predicting permeability
K = φ3f d2
p
c1(1 − φf)2, (3.75)
while the second term (microscopic inertia term) contains a dependence on porosity
b = c2√c1
φ−3/2f . (3.76)
3.5 Flow of Complex Fluids in Non-deformable FibrousMicrostructures
3.5.1 Slightly Compressible Fluids
The compressibility of viscous polymer is due to volatiles or air entrapped in the resinthat does not escape from the composite before resin cures or thermoplastic polymersolidifies. For instance, impregnation of double scale porosity fabrics may lead tothe creation of micro voids according to mechanism depicted in Fig. 3.10. The fluidflow in such dual scale porous media will impregnate the larger pores faster than thesmaller pores within fiber tows. The partially saturated region is created due to thisheterogeneity in the pore distribution. It refers to the region where the macroscopic
t1 t2 > t1
Fig. 3.10 Microvoid formation mechanism in a dual scale porosity fabric [4]

136 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
front has reached all the spaces between the fiber tows but the pores between thefibers inside a tow are not yet completely filled.
The voidsmaymigrate due to the pressure gradient in the fluid or othermechanicalaction.Another source of void formation is a lack of consolidation in during processeslike robotic tape placement. If the resin pressure is too low, insufficient consolidationcould occur and the contact between the individual plies is not intimate. In addition,if the pressure in the polymer is too low, it cannot prevent voids from growing.
Physically it implies that there are small voids trapped in the viscous fluid. Consid-ering the fluidwith entrapped voids as a continuum, the compound structure becomesslightly compressible as long as voids are not squeezed out. The continuity equationfor the fluid has to be modified accordingly.
Substituting Eq. (3.11) into Eq. (3.47) yields
∂φfρf
∂t− ∇ ·
(ρf
ηK · ∇ P
)= 0. (3.77)
After carrying out the time differentiation of the LHS of Eq. (3.77) it comes(
φf∂ρf
∂ P+ ρf
∂φf
∂ P
)∂ P
∂t− ∇ ·
(ρf
ηK · ∇ P
)= 0. (3.78)
If the fibrous medium is supposed incompressible, then
∂φf
∂ P= 0. (3.79)
The fluid compressibility C f is defined by the equation of state at a fixed temper-ature T
Cf = − 1
V
∂V
∂ P
∣∣∣T
= 1
ρf
∂ρf
∂ P
∣∣∣T, (3.80)
where V stands for the volume occupied by the fluid.Combining Eqs.(3.78)–(3.80) gives a relationship for the unknowns P and ρf . In
the following the case of a slightly compressible fluid is investigated so as to havea linear relationship between P and ρf . We assume that the fluid compressibility Cfis constant over a certain range of pressures. Then the fluid compressibility can bewritten as
ρf = ρ0 eCf (P−P0), (3.81)
where ρ0 is the density at the reference pressure P0. Expressing Eq. (3.81) with aTaylor expansion, it comes
ρf = ρ0
[1 + Cf(P − P0) + 1
2!C2f (P − P0)
2 + · · ·], (3.82)

3.5 Flow of Complex Fluids in Non-deformable Fibrous Microstructures 137
which can approximated to
ρf ≈ ρ0
[1 + Cf(P − P0)
]. (3.83)
Then it follows that
∂ρf
∂ P= ρ0Cf . (3.84)
Substituting Eqs. (3.84) and (3.79) into Eq. (3.78) gives
φfρ0Cf∂ P
∂t− ∇ ·
(ρf
ηK · ∇ P
)= 0, (3.85)
which is a parabolic equation in P .
3.5.2 Reactive Fluids
We consider a fluid that flows at velocity vf between stationary fibers in the elemen-tary volume depicted in Fig. 3.11. Suppose it reacts at the contact of fibers to createsolid matter surrounding each fiber wetted by the fluid. Then the fluid/fiber interfaceS depicted in Fig. 3.11 evolves. We note W the absolute velocity of this interface.We neglect the fluctuations of vf inside the elementary volume.
Fig. 3.11 Flow in anevolving microstructure
U
U
U
S U

138 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
The conservation of mass in the elementary volume reads
∂〈ρf 〉∂t
+ ∇ · 〈ρfvf 〉 = 1
V
∫
S
ρfW · ndS − 1
V
∫
S
ρfvf · ndS. (3.86)
U is introduced as the relative velocity of the interface. If the representative vol-ume element is non deformable, U is the relative velocity due to changes betweenconstituents (chemical reactions, phase changes).
U = W − vf . (3.87)
Then the continuity equation reads
∂〈ρf 〉∂t
+ ∇ · 〈ρfvf 〉 = 1
V
∫
S
ρfU · n dS. (3.88)
3.6 Numerical Simulation
The numerical simulation of the flow of a viscous resin through a complex array offibers can be developed by discretizing the governing partial differential equation pre-sented in this chapter with numerical methods such as finite difference, finite elementor other techniques like boundary elements, meshless or element-free methods.
The goal of numerical simulation is to help to understand the flow behavior insidefabrics especially when the medium to impregnate exhibits large spatial variation ofpermeability or when the geometry of the part to manufacture is complex. As theimpregnation of the porous medium involves a moving boundary to track the flowfront, the Control Volume Finite Element Method (CVFEM) also called the FiniteVolume Method (FVM)—is often used to simulate the flow at the macroscale [1](alternative method using Level Set method, motivated by the multi-phase flow prob-lems begins to be adopted [21, 22]). It is a hybrid method that combines the advan-tages of the finite element and the finite volume methods. The CVFEM approachdoes not require remeshing at each time step. For the discretization, the approachfollows that of the finite volume method, whereas the conservation laws are appliedto the control volumes of the FVM, such that the local conservation of the propertiesis satisfied. Control volumes are created around the node points on a fixed finiteelement mesh that conforms to an arbitrarily shaped domain. The fluxes across con-trol volume faces are approximated using finite element interpolation. Each controlvolume has a fill factor (f) associated with it. It represents the ratio of the volume offluid to the total volume of the control volume. The control volumes can be empty (f= 0), partially filled (0 < f < 1), or completely filled (f = 1). The flow front is trackedby determining which control volumes are partially filled so as to connect them toobtain the flow front pattern. The numerical flow front is constituted of nodes with

3.6 Numerical Simulation 139
partially filled control volumes. As the exact location of the fluid inside the controlvolume cannot be determined, the exact flow pattern front is not known. Thus, a toocoarse mesh can lead to a poor prediction of the flow pattern.
Thepressure in thefilled control volumes is usually evaluatedby theGalerkinfiniteelement method, solving the pressure equation Eq. (3.49). Pressures are calculatedwhere nodes are full, whereas only partially filled nodes are assumed to be close to theflow front and the flow front boundary condition is applied there. After pressures atthe nodes are computed, the velocities are calculated at the centroid of each elementusing the Darcy law. It is assumed that the velocity of the fluid is constant throughouteach element. Then the flow rate is computed, and the front is advanced with thecontrol volume approach. The flow front is advanced at each time step by updating thefill factors of control volumes, using the flow rates between the connecting nodes.The time step is chosen so as to fill one additional control volume. A larger timestep induces the flow front to go beyond the control volume and yields to a lossof mass. Once the flow front is advanced, the fluid domain is changed. Then thepressure solution is computed for the new domain and this process is repeated untilthe complete domain is filled up. More details about the VOF method are given inChap.2 of this book.
References
1. S. Advani, E. Murat Sozer (eds.), Process Modeling in Composites Manufacturing, vol. 59(CRC Press, Boca Raton, 2002)
2. S.Advani,K-THsiao (eds.),Manufacturing Techniques for Polymer Matrix composites (PMCs)(Elsevier, Amsterdam, 2012)
3. C. Binetruy, B. Hilaire, J. Pabiot, The interactions between flows occurring inside and outsidefabric tows during RTM. Compos. Sci. Technol. 57(5), 587–596 (1997)
4. C. Binetruy, B. Hilaire, J. Pabiot, Tow impregnation model and void formation mechanismsduring RTM. J. Compos. Mater. 32(3), 223–245 (1998)
5. S. Comas-Cardona, B. Cosson, S. Bickerton, C. Binetruy, An optically-based inverse methodto measure in-plane permeability fields of fibrous reinforcements. Compos Part A: Appl. Sci.Manuf. 57, 41–48 (2014)
6. B. Gourichon, C. Binetruy, P. Krawczak, A new numerical procedure to predict dynamic voidcontent in liquid composite molding. Compos. Part A: Appl. Sci. Manuf. 37(11), 1961–1969(2006)
7. B. Gourichon, C. Binetruy, P. Krawczak, Experimental investigation of high fiber tow countfabric unsaturation during RTM. Compos. Sci. Technol. 66(7), 976–982 (2006)
8. B. Gourichon, Dynamic void content prediction during radial injection in liquid compositemolding. Compos. Part A: Appl. Sci. Manuf. 39(1), 46–55 (2008)
9. S. Hoa, Principles of the Manufacturing of Composite Materials (DEStech Publications Inc,Lancaster, 2009)
10. T. Kanit, S. Forest, I. Galliet, V. Mounoury, Determination of the size of the representativevolume element for random composites: statistical and numerical approach. Int. J. Solids.Struct. 40, 3647–3679 (2003)
11. M. Ostoja-Starzewski, Microstructural Randomness and Scaling in Mechanics of Materials(CRC Press, Boca Raton, 2010)

140 3 Flows of Simple Fluids in Complex Microstructures: Composite Processing …
12. C.H. Park, A. Lebel, A. Saouab, J. Breard, W.I. Lee, Modeling and simulation of voids andsaturation in liquid composite molding processes. Compos Part A: Appl. Sci. Manuf. 42(6),658–668 (2011)
13. C. Pelissou, J. Baccou, Y. Monerie, F. Perales, Determination of the size of the representativevolume element for random quasi-brittle composites. Int. J. Solids. Struct. 46, 2842–2855(2009)
14. K.M. Pillai, S. Advani, Numerical and analytical study to estimate the effect of two lengthscales upon the permeability of a fibrous porous medium. Transp. Porous Media 21(1), 1–17(1995)
15. K.M. Pillai. Governing equations for unsaturated flow throughwoven fibermats. Part 1. Isother-mal flows. Compos. Part A, 33/7, 1007–1019 (2002)
16. J.S.U. Schell, M. Deleglise, C. Binetruy, P. Krawczak, P. Ermanni, Numerical prediction andexperimental characterisation ofmeso-scale-voids in liquid compositemoulding. Compos. PartA: Appl. Sci. Manuf. 38(12), 2460–2470 (2007)
17. J. Slade,K.M. Pillai, S.Advani, Investigation of unsaturated flow inwoven, braided and stitchedfibermats duringmold-filling in resin transfermolding. Polym.Compos. 22(4), 491–505 (2001)
18. J.C. Slattery, Energy Momentum and Mass Transfer in Continua (Krieger, Huntington, 1981)19. S. Torquato, Random Heterogeneous Materials: Microstructure and Macroscopic Properties
(Springer, New York, 2002)20. C.L. Tucker III, R.B. Dessenberger, Governing Equations for Flow and Heat Transfer in
Stationary Fiber Beds. Chapter 8, ed. byS.G.Advani, Flowand rheology in polymer compositesmanufacturing (Elsevier, Amsterdam, 1994), pp. 257–323
21. F. Zhang, B. Cosson, S. Comas-Cardona, C. Binetruy, Efficient stochastic simulation approachfor RTM process with random fibrous permeability. Compos. Sci. Technol. 71(12), 1478–1485(2011)
22. F. Zhang, S. Comas-Cardona, C. Binetruy, Statistical modeling of in-plane permeability ofnon-woven random fibrous reinforcement. Compos. Sci. Technol. 72(12), 1368–1379 (2012)