Embed Size (px)
Citation preview

Flow of Newtonian and Non-Newtonian
Fluids in a Scraped Surface Heat
Exchanger
by
Ali Imran
CMS# 11524
Supervised by
Prof. Dr. Muhammad Afzal Rana
Prof. Dr. Abdul Majeed Siddiqui
DEPARTMENT OF MATHEMATICS & STATISTICS
RIPHAH INTERNATIONAL UNIVERSITY ISLAMABAD, PAKISTAN
December, 2016

ف ٱليل وٱلنهار ٠٩١ ت وٱلرض وٱختل و إن فى خلق ٱلسمب ولى ٱللب ت ل لءاي
190 In the creation of the heavens and the earth, and in the alternation of night and day, are signs for people of understanding.
ما وقعودا وعلى جنوبهم ويتفكرون ٠٩٠ قي ٱلذين يذكرون ٱللت وٱلرض ر و نك فقنا فى خلق ٱلسم طل سبح ذا ب بنا ما خلقت ه
عذاب ٱلنار 191 Those who remember God while standing, and sitting, and on their sides; and they reflect upon the creation of the heavens and the earth: "Our Lord, You did not create this in vain, glory to You, so protect us from the punishment of the Fire."
سورۃ آل عمران

Flow of Newtonian and Non-Newtonian
Fluids in a Scraped Surface Heat
Exchanger
by
Ali Imran CMS# 11524
Supervised by
Prof. Dr. Muhammad Afzal Rana
Prof. Dr. Abdul Majeed Siddiqui
A thesis submitted in the partial fulfillment of the requirements for the degree of
DOCTOR OF PHILOSOPHY
IN
MATHEMATICS
DEPARTMENT OF MATHEMATICS & STATISTICS RIPHAH INTERNATIONAL UNIVERSITY
ISLAMABAD, PAKISTAN

i
Declaration
I Ali Imran hereby declare that this work has not previously been accepted for any degree and is
not being concurrently submitted anywhere for any degree.
__________________ (Candidate Signature)

ii
Certificate
The work presented in this thesis has been accomplished completely by the candidate under
the supervision of Prof. Dr. Muhammad Afzal Rana Department of Mathematics and Statistics,
Riphah International University, Islamabad and Prof. Dr. Abdul Majeed Siddiqui Department of
Mathematics, York Campus, Pennsylvania State University, York, USA. All source of information have
been acknowledged in this thesis.
____________________
Ali Imran
(Supervisor) Prof. Dr. Muhammad Afzal Rana
(Supervisor) Prof. Dr. Abdul Majeed Siddiqui


iv
Dedicated to my Parents, Wife, Daughter and Son

v
Acknowledgements
Firstly and foremostly I would like to thank Almighty Allah the most gracious and the
most powerful. Who made me a Muslim and among the Ummah of Prophet Muhammad
(PBUH), who made me capable of undertaking this work. Then I would like to express my
heartiest gratitude to my supervisors Prof. Dr. A. M. Siddiqui and Prof. Dr. Muhammad
Afzal Rana, for their guidance, visionary assistance, innovative ideas and for their
beneficial remarks. Their encouragement throughout my PhD work was absolutely
imperative to complete this work.
I am grateful to all my teachers at Riphah International University, whose teaching
brought me to this stage.
I am thankful to all my class fellows especially Ahsan Walait and Hameed Ashraf for
help their cooperation and moral support.
I would also like to thank all my colleagues at CIIT Attock. I always found them ready
to help me throughout the course of my Ph. D. studies, especially I am thankful to Dr.
Muhammad Zeb and Dr. Salman Saleem for their help and cooperation during my
research work.
I would like to express my gratefulness to my family especially my father, mother and
all the brothers and sister because I cannot gave them time due to burden of studies.
They have been a real source of encouragement for me.
Lastly I express my gratitude to my wife, my daughter and son, who bore with me
despite the fact that I could not spend ample time with them during the hectic task of my
research studies.
ALI IMRAN

vi
Abstract
Scraped-surface heat exchangers (SSHEs) are extremely used in the food industry to
cook, chill or sterilize certain foodstuffs swiftly and excellently without causing undesirable
changes to texture, constitution and appearance of the final product. They are widely used in the
chemical and pharmaceutical industries (for example, producing paints, etc.). A SSHE consists of
steel annulus and a bank of blades that rotates with the inner wall. The outer wall is heated or
cooled and the foodstuff is driven slowly by axial pressure gradient along the annulus. The gaps
between the blades and the device wall are considered to be narrow (the aspect ratios being of
order 10−1 and the appropriate reduced Reynolds number being of order 10−2 ) so that the
“lubrication approximation theory” may be used to analyze the flow. Steady isothermal flow of
Newtonian and non-Newtonian fluids around periodic array of pivoted scraper blades in a channel
in which the lower wall is moving and the upper wall is static, when there is an applied pressure
gradient in a direction perpendicular to the wall motion, is modeled and analyzed theoretically.
The three-dimensional flow decomposes naturally into a two-dimensional “transverse” flow driven
by the boundary motion and a “longitudinal” pressure-driven flow. Analytic expressions for
velocity profiles, flow rate, stream function and forces on the wall and blades are obtained and
visualized graphically. It is expected that this work will provide quantitative understanding of
some fundamental aspects of fluid flow inside SSHE and basis for subsequent studies of more
complicated physical effects.

vii
Notations
Symbols Interpretations
the imposed uniform magnetic field.
the drag force on the blade.
the lift force on the blade.
the force in x -direction of lower wall of
the channel.
the force in x -direction of upper wall of
the channel.
position of lower end of blade.
position of upper end of blade.
M Hartman number.
the moment of forces.
the fluid behavior index.
flow rate in the first region of SSHE.
flow rate in the second region of SSHE.
flow rate in the third region of SSHE.
velocity in the first region of SSHE.
velocity in the second region of SSHE.
velocity in the third region of SSHE.
Wi the Weisenburg number.
B0
Fx
Fy
F0
FH
h0
h1
M1
n
Q1
Q2
Q3
u1
u2
u3

Contents
1 Introduction 1
1.1 Scraped Surface Heat Exchanger . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Literature Survey . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Keynote of this Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Lubrication Approximation Theory (LAT) . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Adomian Decomposition Method (ADM) . . . . . . . . . . . . . . . . . . . . . . 9
2 MHD Flow of Newtonian Fluid in a Scraped Sur-face Heat Exchanger 11
2.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Qualitative Features of the Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Forces on the Blades and the Walls . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 Contact Between the Blade and a Channel Wall . . . . . . . . . . . . . . . . . . . 22
2.6 Graph and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 MHD Flow of Newtonian Fluid in a Scraped Surface Heat Exchanger with Slip . 25
2.8 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Flow of a Second Grade Fluid in a Scraped SurfaceHeat Exchanger 37
3.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3 Forces on the Blade and the Walls . . . . . . . . . . . . . . . . . . . . . . . . . . 43

3.4 Graph and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 Flow of a Third Grade Fluid in a Scraped SurfaceHeat Exchanger 51
4.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.2.1 Zeroth Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.2 First Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2.3 Second Order Solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.4 Velocity Pro�le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.3 Forces on the Blade and the Walls . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.4 Graphs and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5 Flow of a Sisko Fluid in a Scraped Surface HeatExchanger 70
5.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.2.1 Zeroth Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2.2 First Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.2.3 Second Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.2.4 Velocity Pro�le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.3 Forces on the Blade and the Walls . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.4 Graphs and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6 Flow of Eyring Fluid in a Scraped Surface HeatExchanger 89
6.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
6.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90

6.3 Qualitative Features of the Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
6.4 Forces on the Blade and the Walls . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.5 Graph and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7 Study of a Eyring-Powell Fluid in a Scraped Sur-face Heat Exchanger 103
7.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
7.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
7.2.1 Zeroth Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.2.2 First Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.2.3 Second Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.2.4 Velocity Pro�le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
7.3 Forces Inside Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
7.4 Graphs and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
7.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
8 Study of a Co-Rotational Maxwell Fluid in a ScrapedSurface Heat Exchanger 124
8.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
8.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
8.2.1 Zeroth Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
8.2.2 First Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
8.2.3 Second Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
8.2.4 Velocity Pro�le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
8.3 Graphs and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
8.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
9 Flow of Oldroyd 8-Constant Fluid in a ScrapedSurface Heat Exchanger 141
9.1 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141

9.2 Solution of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
9.2.1 Zeroth Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
9.2.2 First Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
9.2.3 Second Order Solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
9.2.4 Velocity Pro�le . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
9.3 Graphs and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
9.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Bibliography 174

List of Figures
1.1 A cutway piece of four bladed SSHE. . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Cut-away schematic diagram of a typical SSHE [28]. . . . . . . . . . . . . . . . . 3
2.1 Cross-sectional view of SSHE, the black dots show the position of blade pivots. . 12
2.2 E¤ect of Magnetic �eld on velocity pro�le taking H = 2:1; l = 2; xp = 0:49;
� = 1:25322; M = 2; x = 1; p1x = p2x = �2: . . . . . . . . . . . . . . . . . . . . . 25
2.3 E¤ect of pressure gradient on velocity pro�le taking H = 2:1; l = 2; xp =
0:49; � = 1:25322;M = 2; x = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4 Stream line patterns in region 1-3 taking M = 2, H = 1:7; l = 2; xp = 0:49; � =
1:25322: (a) represents stream line patterns in region 1 (below the thick line) and
region 2 (above the thick line) while (b) represents stream line patteren in region
3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Plots of p1� pL and p2� pL taking M = 2, H = 1:7; l = 2; xp = 0:49; � = 1:25322: 27
2.6 E¤ect of force on moving wall taking (a) M = 2, H = 1:7 and (b) M = 2; l = 100: 27
2.7 Volume �uxes in region 1-3 taking M = 2, H = 3 , l = 0; 0:1; 0:25; 0:5; 1; 2;
4; 1000: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.8 Stream line patterns in region 1-3 taking M = 2;H = 3; l = 12 ; xp = 0:595; � =
�1:48967: (a) represents stream line patterns in region 1 (below the thick line)
and region 2 (above the thick line) while (b) represents stream line patteren in
region 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 E¤ect of � on velocity pro�les in three region taking H = 3; l = 1; xp = 0:49;
� = 1:25322; x = 1; Re = 0:01; p1x = p2x = p3x = �2; � = 1; 2; 3; 4; 5: . . . . . . . 45

3.2 E¤ect of pressure gradient on velocity pro�les taking H = 1:7; l = 2; xp = 0:49;
� = 1:25322; x = 1; Re = 0:01; � = 1: . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 E¤ect of Reynolds number on velocity pro�les taking H = 1:7; l = 2; xp = 0:49;
� = 1:25322; x = 1; � = 1; p1x = p2x = p3x = �2: . . . . . . . . . . . . . . . . . . 47
3.4 Streamline patteren in di¤erent stations of SSHE taking � = 1, H = 1:7; l =
2; xp = 0:49; � = 1:25322; Re = 0:01: . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 Streamline patteren in di¤erent stations of SSHE taking � = 1, H = 3; l = 2;
xp = 0:595; � = �1:48967; Re = 0:01: . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.6 Plots of p1 � pL and p2 � pL taking � = 1, H = 1:7; l = 2; xp = 0:49; � = 0:5;
Re = 2; � = 1: 3.6(b) with � = 1, H = 1:7; l = 2; xp = 0:49; � = 1:25322;
Re = 2; � = 2: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.7 E¤ect of non-Newtonian parameter on �ow rate taking H = 3; � = 1:25322;
l = 1; xp = 0:595;Re = 0:01: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.8 Flow rates taking � = 1, H = 1:75 , Re = 0:01,l = 0:1; 0:25; 0:5; 1; 2; 4; 10: . . . 50
4.1 E¤ect of Non-Newtonian parameter � on velocity pro�les by �xing H = 1:7;
l = 2; xp = 0:49; � = 1:25322; x = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . 65
4.2 E¤ect of pressure gradient on the veloity pro�le by taking H = 1:7; l = 2;
xp = 0:49; � = 1:25322; x = 1; � = 0:1: . . . . . . . . . . . . . . . . . . . . . . . . 66
4.3 Srteam lines patrens in di¤erent regions of SSHE by taking H = 1:7; l = 2;
xp = 0:49; � = 1:25322; � = 0:05: . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4 Stream lines patrens in di¤erent regions of SSHE, with H = 3; l = 0:5; xp =
0:595; � = �1:48967; � = 0:05: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.5 Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 0:2, for
l = 0; 0:1; 0:25; 0:5; 1; 2; 4; 10: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.6 Plot of pressures p1 � pL and p2 � pL as a function of x with H = 1:7; l = 2;
xp = 0:49; � = 0:5; � = 0:2: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
5.1 E¤fect of behaviour index on velocity pro�le in three regions by taking H = 1:4;
l = 1; xp = 0:49; � = 0:4; � = 0:2, x = 1; n = 0:1; 0:6; 0:9; 1:3; 1:9, p1x = p2x =
p3x = �1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84

5.2 E¤ect of favourable pressure gradient on velocity pro�les in three regions by
taking H = 1:7; l = 1; xp = 0:49; � = 0:5; � = 0:4; x = 1; n = 1, p1x = p2x =
p3x = �1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3 E¤ect of Sisko �uid parameters on velocity pro�les in three regions by taking
H = 1:7; l = 1; xp = 0:49; � = 0:5; x = 1; n = 1; p1x = p2x = p3x = �1: . . . . . . 86
5.4 Stream line patterens inside SSHE by taking H = 1:7; l = 2; xp = 0:49; � =
1:25322; � = 0:4; n = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.5 Stream line patterens inside SSHE with H = 3; l = 0:5; xp = 0:595; � =
�1:48967; � = 0:2; n = 2: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.6 Flow rate grpahs by setting H = 3; � = 0:4; n = 1; l = 0; 110 ; 0:25; 0:5; 1; 2; 4; 10: . . 88
5.7 Plots of pressrue at the edge of blade by taking (a) H = 1:7; l = 2; xp = 0:49;
� = 1:25322; � = 0:2; n = 2: (b) H = 1:7; l = 2; xp = 0:49; � = 0:432872; � =
0:2; n = 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
6.1 E¤ect of on velocity pro�le in three regions taking H = 1:7; l = 2; xp = 0:49;
� = 1:25322; " = 0:3; x = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . 96
6.2 E¤ect of " on velocity pro�le in three regions taking H = 1:7; l = 2; xp = 0:49;
� = 1:25322; = 2; x = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . 97
6.3 E¤ects of favourable pressure gradient on velocity proile in three regions taking
H = 1:7; l = 2; xp = 0:49; � = 1:25322; " = 0:5; = 2; x = 1: . . . . . . . . . . . 98
6.4 Stream line patterens in three regions taking H = 1:7; l = 2; xp = 0:49; � =
1:25322; = 2; " = 0:5; x = 1; p1x = p2x = p3x = �0:5: . . . . . . . . . . . . . . . 99
6.5 Stream line patterens in three regions taking H = 1:7; l = 2; xp = 0:595;
� = �1:48967; = 2; x = 1; p1x = p2x = p3x = �0:5. . . . . . . . . . . . . . . . . 99
6.6 E¤ect of on �ow rate in three regions taking l = 2; � = 1:25322; H = 3 , = 2;
4; 6; 8; 10:p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6.7 E¤ect of " on �ow rate in three regions taking l = 2; � = 1:25322;H = 3 , = 3;
" = 0:3; 0; 6; 0:9; 1:2:p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . . . . . 101
6.8 Plots of pressure at the edge of blades inside SSHE taking (a) H = 1:7, l =
2; � = 0:5; = 2; " = 0:5:(b) H = 1:7, l = 2; � = 1:25322; = 2; " = 0:5: . . . . . 102

7.1 E¤ect of Non-Newtonian parameter �� on velocity pro�les by �xing H = 1:7;
l = 2; xp = 0:49; � = 1:25322; x = 1; �� = 1; p1x = p2x = p3x = �0:5: . . . . . . . 117
7.2 E¤ect of Non-Newtonian parameter �� on velocity pro�les in three regions by
�xing H = 1:7; l = 2; xp = 0:49; � = 1:25322; x = 1; �� = 1; p1x = p2x = p3x =
�0:5: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
7.3 Impact of favourable pressure gradient on velocity pro�le in three regions by
�xing H = 1:7; l = 2; xp = 0:49; � = 1:25322; x = 1; �� = �� = 1: . . . . . . . . . 119
7.4 Stream lines patterns in di¤erent regions of SSHE taking H = 1:7; l = 2; xp =
0:49; � = 1:25322; �� = �� = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
7.5 Stream lines patterns in di¤erent regions of SSHE taking H = 3; l = 0:5; xp =
0:595; � = �1:48967; �� = 1; �� = 0:5: . . . . . . . . . . . . . . . . . . . . . . . . 120
7.6 Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 1:25322; �� =
�� = 1, for l = 0; 0:1; 0:25; 0:5; 1; 2; 4; 10: . . . . . . . . . . . . . . . . . . . . . . . 121
7.7 Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 1:25322; �� =
�� = 1, for l = 1; �� = 1; 2; 3; 4; 5; 6; 7: . . . . . . . . . . . . . . . . . . . . . . . . 122
7.8 Plots of pressure at the edge of blades inside SSHE taking (a) H = 1:7; l = 2;
xp = 0:49; � = 0:5; �� = �� = 1:(b) H = 1:7; l = 2; xp = 0:49; � = 1:25322; �� =
�� = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
8.1 Impact of favourable pressure gradient on velocity pro�les in three region by
�xing H = 3; l = 1; xp = 0:49; � = 1:25322; x = 1;Wi = 0:02: . . . . . . . . . . . 135
8.2 Impact of favourable pressure gradient on velocty pro�le in three regions by �xing
H = 1:7; l = 0:5; xp = 0:595; � = �1:48967; x = 1; Wi = 0:8: . . . . . . . . . . . 136
8.3 E¤ect of Weisenburg number on velocity pro�les in three regions by �xing H = 3;
l = 1; xp = 0:49; � = 1:25322; x = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . 137
8.4 Stream lines patterns in di¤erent regions of SSHE taking (a) H = 3; xp = 0:49;
� = 1:25322;Wi = 0:1; p1x = p2x = p3x = �1:(b) H = 3; l = 2; xp = 0:595;
� = �1:48967;Wi = 0:001: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
8.5 Stream lines patterns in di¤erent regions of SSHE with H = 3; l = 2; xp = 0:595;
� = �1:48967;Wi = 0:001; p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . 138

8.6 Plot of �uxes Q1, Q2 and Q3 depending on xp with H = 3; � = 1:25322;Wi =
0:01 and varying p1x = p2x = p3x = �0:1;�0:2;�0:4;�0:6;�0:8;�1: . . . . . . . 138
8.7 E¤ect of Weisenburg number on volume �ow rate �xing H = 3; � = 1:25322;
p1x = p2x = p3x = �0:5 and varrying Wi = 0:1; 0:2; 0:4; 0:6; 0:8: . . . . . . . . . . 139
9.1 Impact of � on velocity pro�le in three regions by �xing H = 3; l = 1; xp = 0:49;
�1 = 1:25322; x = 1; � = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
9.2 Impact of � on velocity pro�le in three regions by �xing H = 3; l = 1; xp = 0:49;
�1 = 1:25322; x = 1; � = 1: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
9.3 Stream lines patterns in di¤erent regions of SSHE with H = 3; xp = 0:595;
�1 = 1:25322; � = 0:1; � = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . 154
9.4 Stream lines patterns in di¤erent regions of SSHE with H = 3; xp = 0:595; �1 =
�1:48967; � = 0:1; � = 1; p1x = p2x = p3x = �1: . . . . . . . . . . . . . . . . . . . 155
9.5 Plot of �uxes Q1, Q2 and Q3 depending on xp with H = 3; � = 1 by varying
� = 0:1; 0:2; 0:3; 0:4; 0:5; 0:6: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
9.6 Plot of �uxes Q1; Q2 and Q3 for di¤erent values H = 3; � = 1; p1x = p2x = p3x =
�0:5; and varrying � = 0:1; 0:2; 0:3; 0:4; 0:5; 0:6: . . . . . . . . . . . . . . . . . . . 157
.

List of Tables
5.1 Velocity distribution in region 1 of SSHE for Sisko �uid . . . . . . . . . . . . . . 82
5.2 Velocity distribution in region 2 of SSHE for Sisko �uid . . . . . . . . . . . . . . 82
5.3 Velocity distribution in region 3 of SSHE for Sisko �uid . . . . . . . . . . . . . . 82
5.4 Flow distribution inside SSHE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
7.1 Velocity distribution in Region 1 of SSHE for Eyring Powell Fluid . . . . . . . . 114
7.2 Velocity distribution in Region 2 of SSHE for Eyring Powell Fluid . . . . . . . . 115
7.3 Velocity distribution in Region 3 of SSHE for Eyring Powell Fluid . . . . . . . . 115
7.4 Flow rate distribution as function of Non-Newtonian parameter . . . . . . . . . . 116
7.5 Flow rate distribution as function of Non-Newtonian parameter . . . . . . . . . . 116
8.1 Velocity distribution in region 1 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 133
8.2 Velocity distribution in region 2 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 133
8.3 Velocity distribution in region 3 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 134
8.4 Flow rate distribution in di¤erent regions of SSHE . . . . . . . . . . . . . . . . . 134
9.1 Velocity distribution in region 1 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 151
9.2 Velocity distribution in region 2 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 152
9.3 Velocity distribution in region 3 of SSHE. . . . . . . . . . . . . . . . . . . . . . . 152
9.4 Flow rate distribution in di¤erent regions of SSHE. . . . . . . . . . . . . . . . . . 155
.

Chapter 1
Introduction
1.1 Scraped Surface Heat Exchanger
Scraped surface heat exchangers (SSHEs) are heavily used in various industrial process where
continues processing of �uid and �uid like material is involved. They are frequently used in
Pharmaceutical and chemical industries, e. g, in dewaxing oil and producing paints, however
they are mostly used in food industry, where they are used to mix, heating or cooling the
foodstu¤, in sterilization, crystallization and gelatinisation.
In comparison to the simpler plate heat exchanger which are commonly used for less viscous
process, SSHEs are engineered to cope with the problems arising during processing highly
viscous products. Foodstu¤ namely ice cream, margarine, chocolate, sauces, peanut butter,
spread, creams, caramel, purees, salad dressing, soup, jams, yoghurt are all manufactured using
SSHEs.
A SSHE primarily consists of a cylindrical rotating shaft (the rotor) within a concentric
hollow stationary cylinder (the stator) to make annular region around which the �uid being
process is pumped. The stator act as heat transfer surface and it is normally enclosed with
another cylindrical tube which provides a gap through which a heating or cooling service �uid
(e.g steam or ammonia) passes. Pivoted blades are installed with the rotor, each of these blades
scrap the foodstu¤ from the outer surface, in the manufacturing of ice cream they mix the ice
and air particles, remove the processed �uid and allow the unprocessed �uid closer to the stator.
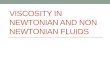
A cut way sketch of four bladed SSHE is shown in Figure 1.1 and more detail description is
1

shown in Figure 1.2.
Figure 1.1: A cutway piece of four bladed SSHE.
In order to maximize the e¢ ciency, the stator is manufactured from material which possesses
high heat transfer coe¢ cients such as nickel and it is normally coated with hard chrome plated
�nish in order to protect it from the scraping action on the blades. The blades are made using
stainless steel, however, plastic one are used for certain special application. In a typical SSHE
there are either two or four blades installed periodically around the rotor and this con�guration
is repeated periodically. In order to minimize the power consumption the blades are design
with holes while oval stators reduce �channeling�in which �uid passes through the exchanger
relatively unprocessed. The non-centrally mounted shafts enhances mixing and avoid material
from accumulating under the blades.
The rotating scraper blades do various task which are extremely important in food process-
ing. Their main advantage is that they enhance the heat transfer between the stator and
process �uid by continually replacing the �uid nearest to the stator. Which make sure that
�uid is evenly processed, reduces the probability of temperature inhomogeneities when it arise
in SSHE.
2

Figure 1.2: Cut-away schematic diagram of a typical SSHE [28].
As narrated above the stator is being scraped, the problem of decreased performance in
the heat transfer due to food deposit accumulating on the heat transfer surface is also avoided,
which means SSHE can run for longer period of time. The blades also help in mixing the
di¤erent materials which helps to get more wanted consistent quality to the texture and taste
of the product. In the manufacturing of ice cream the action of the blades helps to blend
the �uid, air and ice particle that are formed on the cooled stator surface to produce smooth
consistent quality. The process of mixing the �uid while heating or cooling also depicts that
high temperature gradient can be used without compromising the product.
On other hand, the complex structure of an SSHE makes it more expensive capital in-
vestment in comparison to some usually used heat exchanger and so due to these reasons the
food manufacturer are looking to optimize their production runs to reduce the operator cost.
For these reasons much experimental and theoretical research is being carried out on various
types of SSHEs using di¤erent operating conditions and �uid rheologies. Because of complex
3

nature of heating cooling and mixing mechanism, there are various indicators that need to be
taken into consideration in order to get complete insight of the �ow inside SSHE. Firstly, the
geometry and operating parameters of SSHE surely play a vital role, and properties such as
device dimension rotation speed, blades design and the rates require to be carefully considered
in order to optimize e¢ ciency and create the conducive atmosphere inside the heat exchangers.
The other important indicators that must be taken into consideration are the rheological char-
acteristics of the �uids, however, the �uids that are usually non-Newtonian, inhomogeneous,
visco plastics, viscoelastic, comprise of particulates, have temperature variant viscosities and/
or undergo phase changes during the cycle through the device clearly �uid characteristics will
depicts variety of �uid behaviors.
In case of SSHE the gap between the blades and the device wall is narrow. So, in order to
model the �ow the lubrication approximations theory (LAT) is employed. Steady isothermal
�ow of di¤erent Newtonian non-Newtonian �uid models around a periodic array of pivoted
scraper blade in a channel in which the lower wall is moving and the upper wall is static is
considered. Two-dimensional �ow in the transverse section of a scraped surface heat exchanger
is taken into account.
1.2 Literature Survey
Wang et al. [1] studied theoretical model to characterize the �ow patterns in two-dimensional
angular �ow in an SSHE geometry under isothermal conditions. They experimentally veri�ed
the model by a noninvasive magnetic resonance imaging (MIR) technique. Flow of a non-
Newtonian �uid under isothermal conditions has been investigated by many researchers, for
example, Russell et al. [2], Stranzinger et al. [3]. Heat-transfer mechanisms have been studied
by Trommelen et al. [4] and Qin et al. [5]. Power consumption has been analyzed by Trommelen
and Beek [6]. Researchers also paid attention to �ow patterns occurring in SSHE, that is, the
transition of �ow from laminar to vortical �ow. The condition leading to this transition and
e¤ect of vortical �ow on mixing have been studied by Sykora et al. [7]. Skelland [8], Yamomoto
et al. [9] and Cuevas [10] studied theoretically and predicted heat transfer based on the data
measured during the experiment. Corbett [11] et al. studied the �ow inside SSHE by considering
4

foodstu¤s as Newtonian �uid by taking one scraper blade in the annulus. Important complex
practical �uid �ow problem has been studied by Shankar and Deshpande [12]. Flow in screw
extruder for polymer and food processing is reported by Griifth [13]. Early �ndings on cavity
�ow were reported by Burggraf [14], Pan and Acrivos [15] and Nallasamy and Prasad [16] Grillet
et al. [17] for viscoelastic �uids, Mitsoulis and Zisis [18] for Bingham �uid and Martin [19] for
Power law �uid. Sun et al. [20] and Baccar and Abid [21,22] performed numerical simulations
involving �uid �ow and heat transfer in the context of SSHEs, while related work by Sun et al.
[23] investigated isothermal �ow of shear-thinning �uids in lid-driven cavities in the presence
of an axial through �ow. In order to develop a better understanding of some of the processes
occurring within SSHE, some workers have concentrated on speci�c aspects of the problem that
can be studied analytically. Fitt and Please [24] modelled isothermal �ow of a shear-thinning
�uid in a simpli�ed model of a narrow-gap SSHE which allowed them to determine the optimal
power distribution between rotation and pumping. Du¤y et al. [25] developed a mathematical
model for isothermal �ow of a Newtonian �uid in a narrow-gap SSHE and obtained analytical
expressions for the velocities, pressures and volume �uxes and for the forces on the device. The
latter authors also calculated the possible equilibrium positions of the blades and found that the
blades can make the desired contact with the stator when their pivots are located su¢ ciently
close to the end of the blades. In an accompanying paper, Fitt et al. [26] investigated the
phenomenon of channelling of a Newtonian �uid in a simpli�ed model of a narrow-gap SSHE.
Rodriguez et al. [27] visualized the �ow within a laboratory-scale SSHE and found qualitative
agreement with numerical simulations obtained using a lattice-Boltzmann discretization to solve
the Navier�Stokes equations, and a Lagrangian approach to particle tracking. Smith et al. [28]
investigated the steady non-isothermal �ow of a Newtonian �uid with temperature-dependent
viscosity in a narrow-gap SSHE when a constant temperature di¤erence is imposed across the
gap between the rotor and the stator. They formulated a mathematical model and obtained
exact solutions for the heat and �uid �ow of a �uid with a general dependence of viscosity
on temperature for a general blade shape. Harrod [29] has given detail of experimental and
theoretical work on SSHEs published in 1986 and Rao and Hartel [30] in 2006.
Foodstu¤ normally act as non-Newtonian material, having shear thinning, viscoplastic and/
or viscoelastic behaviour. So in order to study these e¤ects di¤erent non-Newtonian models
5

are taken to investigate the �ow inside SSHE. In chapter 3 second grade �uid model [31,32]
is considered which shows shear thickening behaviour. In chapter 4 third grade �uid model
[33,34] is studied which re�ects shear thinning behaviour. In chapter 5 Sisko �uid model [35,36]
is considered this model shows shear thinning and thickening behaviour. In chapter 6 Eyring
�uid model [37,38] is considered, this �uid model shows pseduplastic behaviour at �nite value
of stress component. In chapter 7 Eyring Powell �uid model [39, 40] is studied which also
possesses shear thinning and thickening e¤ect. In chapter 8 co-rotational Maxwell �uid model
[41, 42] is considered. This �uid acts as �uid for value of Weissenberg number from zero to one
and acts as solid for Weissenberg number greater than one. In chapter 9 Oldroyd 8 constant
�uid model [43,44] is considered. This �uid model shows viscoelastic behaviour.
1.3 Keynote of this Work
Food stu¤ behaves as non-Newtonian material possessing shear-thinning and shear-thickening
e¤ects. Therefore for the understanding of non-Newtonian e¤ects inside SSHE di¤erent non-
Newtonian �uid model have been studied in this work. In addition to food industry this work
will also be helpful in pharmaceutical and chemical industries as material mostly used in the
industry are non-Newtonian in nature.
In case of SSHE, the gaps between the blades and the device wall are assumed to be narrow
so that lubrication approximations theory is applicable. Steady isothermal �ow of Newtonian
and non-Newtonian �uid models around a periodic array of pivoted scraper blade in a channel
in which the lower wall is moving and the upper wall is static is considered. Two-dimensional
�ow in the transverse section of a scraped surface heat exchanger is taken into account.
Chapter 2 aims to develop a mathematical model of electrically conducting incompressible
Newtonian �uid �ow in a scraped surface heat exchanger in the presence of a transverse magnetic
�eld and to analyze the resulting model theoretically. Details of the �ow properties including
the possible presence of regions of reversed �ow under the blades, the forces on the blades and
walls, and the �uxes of �uid above and below the blades are calculated. Graphic representation
for involved �ow parameters is also given.
In Chapter 3, mathematical model for the �ow of a second grade �uid inside a scraped
6

surface heat exchanger is developed. Using LAT, steady incompressible isothermal �ow of a
second grade �uid around a sequence of pivoted scraper blades in a channel in which lower
wall is moving and upper wall is stationary is investigated. Flow properties, namely, velocities,
stream functions, �ow rates, expressions for pressure, the forces on the blades and walls in
di¤erent stations of device are studied. Graphic representation of di¤erent �ow parameters
involved is also incorporated.
In Chapter 4, �ow of a third grade �uid in scraped surface heat exchangers is modelled and
studied theoretically using Adomian decomposition method. Expressions for velocity pro�les for
di¤erent regions, �ow rates, stream function, forces on the wall and on the blade are obtained.
Graphs for velocity pro�le and for di¤erent �ow parameter involved are incorporated.
Flow of a Sisko �uid in scraped surface heat exchanger is studied in Chapter 5. Mathematical
model for steady isothermal �ow of a Sisko �uid model around a periodic array of pivoted scraper
blades in channel with one moving and other stationary wall in the presence of pressure gradient
applied in transverse direction to the wall motion is developed. Adomian decomposition method
is employed to obtain expressions for velocity pro�les for di¤erent regions, �ow rates, stream
functions, forces on the wall and on the blades. Graphs for velocity pro�le and for di¤erent
�ow parameters involved are included.
A mathematical model of steady incompressible isothermal �ow of Eyring �uid in a scraped
surface heat exchanger is investigated in Chapter 6. To study �ow inside SSHE lubrication
approximation theory is used to simplify the equations of motion. Flow of the �uid around a
periodic array of pivoted scraper blade in a channel in which one wall is moving and other is
at rest is analyzed. Flow properties, including the possible presence of regions of reversed �ow
under the blades, the forces on the blades and walls and the �uxes of �uid above and below the
blades are evaluated. Graphic representation for involved �ow parameters is also given.
Flow of a Eyring-Powell �uid in a scraped surface heat exchangers is analyzed in Chapter
7. As in journal every physical phenomena can be interpreted mathematically therefore in this
work a mathematical model is developed and studied for �ow inside SSHE. Steady isothermal
incompressible �ow of Eyring-Powell �uid about a periodic sequence of pivoted scraper blades
in channel with one moving wall and the other stationary when pressure gradient is imposed
in the direction transverse to the wall motion is considered and simpli�ed using lubrication
7

approximation theory. The resulting non linear boundary value problem is solved using Ado-
mian decomposition method. Expressions for velocity pro�les for di¤erent regions, �ow rates,
stream functions, forces on the wall and on the blade are calculated. Graphical representation
for velocity pro�le and for di¤erent �ow parameter involved is also discussed.
In Chapter 8, �ow of Maxwell �uid model in a scraped surface heat exchangers is studied.
Steady incompressible isothermal �ow of a Maxwell �uid model about a periodic arrangement
of pivoted scraper blades in channel for generalized Couette �ow is modeled using lubrication-
approximation theory. The resulting non linear boundary value problem is solved using Ado-
mian decomposition method. Expressions for velocity pro�les for di¤erent regions, �ow rates,
stream functions are found. Graphical representation for velocity pro�le and for di¤erent �ow
parameter involved is also discussed.
In Chapter 9, �ow of Oldroyd 8-constant �uid model in a scraped surface heat exchangers
is studied. Steady incompressible isothermal �ow of the �uid around a periodic arrangement of
pivoted scraper blades is modeled using lubrication approximation theory. The resulting nonlin-
ear boundary value problem is solved employing Adomian decomposition method. Expressions
for velocity pro�les for di¤erent regions, �ow rates, stream functions are obtained. Graphical
and tabular representation for velocity pro�le and for di¤erent �ow parameter involved is also
incorporated.
1.4 Lubrication Approximation Theory (LAT)
LAT describe the �ow of �uid in a geometry in which one dimension is very small in comparison
to others. Examples of these are �ow in SSHEs in the manufacturing of foodstu¤, �ow above
air hockey tables, in which the thickness of air layer under the puck is very small in comparison
to the dimension of puck itself, in the processing of materials in liquid form, such as polymers,
metals, composites and others. Other very important application area is lubrication of machin-
ery parts namely �uid bearings and mechanical seals. Coating is also important application
area including the preparation of thin �lms, printing, painting and adhesives. Studies of red
blood cells in narrow capillaries and of liquid �ow in the lung and eye are biological applications
of LAT.
8

LAT is also used in internal �ows in the design of �uid bearing. Major purpose of LAT is to
determine the pressure distribution in the �uid volume and forces on the bearing component.
In case of SSHE, di¤erent gaps are considered very small i.e., the aspect ratio being of order
10�1 the appropriate reduced Reynolds number being of order 10�2, so that LAT can be used
to study the �ow [25], [28]
The Navier�s Stokes equations for the �ow of the �uid in SSHE using LAT i.e., v << u and
@@x <<
@@y are
@2u
@y2= �
@p
@x; (1.1)
@p
@y= 0: (1.2)
1.5 Adomian Decomposition Method (ADM)
ADM is powerful, e¤ective and easy to handle technique with the help of which variety of linear,
non-linear, ordinary or partial di¤erential equations and linear and nonlinear equations can be
solved.
The ADM was developed and introduced by George Adomian [31] in 1986. The convergence
of Adomian decomposition method [32] was presented in 1990 and then [33] in 1993. This
method has been used by many researchers to study wide range of physical problems [34-46].
The ADM [63] comprises of decomposing the unknown function u (x; y) of an equation into
sum of in�nite number of components describe by the series of the form
u (x; y) =
1Xn=0
un (x; y) ; (1.3)
where the component un (x; y), n > 0 can be determined recursively.
In order to apply ADM, the given linear di¤erential equation is written in operator form
Lu+Ru = g; (1.4)
where L is, mostly, the lower order derivative which is supposed to be invertible, R is other
linear di¤erential operator, and g is source term.
9

Applying inverse operator L�1 to both sides of Eq. (1:4) and using the given condition to
get
u = f � L�1 (Ru) ; (1.5)
where the function f re�ects the terms yield due to integration of source term g and using the
given conditions.
Using Eq.(1:3) into Eq. (1:5) to get
1Xn=0
un = f � L�1 R
1Xn=0
un
!(1.6)
Writing Eq. (1:6) in a recursive manner
u0 = f;
u1 = L�1 (R (u0)) ;
:
:
:
uk+1 = L�1 (R (uk)) :
9>>>>>>>>>>>>=>>>>>>>>>>>>;(1.7)
By adding all the components de�ned in Eq. (1:7) and using the values of these components
into Eq. (1:3) the complete solution is obtained in the series form.
10

Chapter 2
MHD Flow of Newtonian Fluid in a Scraped Surface
Heat Exchanger
In this chapter a mathematical model of an electrically conducting incompressible Newtonian
�uid �ow in a scraped surface heat exchanger in the presence of transverse magnetic �eld is
developed and studied. The gap between the blades and device wall is assumed to be narrow
so that the lubrication approximations theory works for the �ow. Steady isothermal �ow of an
electrically conducting Newtonian �uid is considered around a periodic array of pivoted scraper
blades in the channel in which lower wall is moving and upper wall is at rest. Two dimensional
�ow in a transverse section of scraped surface heat exchanger is taken. Details of the �ow
properties including the possible presence of regions of reversed �ow under the blades, the
forces on the blades and walls and the �uxes of �uid above and below the blades are calculated.
Graphic representation for involved �ow parameters is also given.
2.1 Problem Formulation
Consider a steady isothermal incompressible �ow of an electrically conducting Newtonian �uid
in a channel of width H, in which there is a periodic array of inclined smoothly pivoted thin
plane blades. The �ow is due to the motion of the wall at y = 0 moving with speed U , the wall
at y = H is �xed. Suppose that thin blades occupy space 0 � x � L with their pivot �xed
at (xp;hp); where 0 � xp � L and 0 � hp � H << L; and separation between the blades is
11

Figure 2.1: Cross-sectional view of SSHE, the black dots show the position of blade pivots.
l. The portion L � x � L + l of the channel is in full width. This con�guration is repeated
periodically with period L + l. The channel width H; period L + l and speed U are de�ned
as H = R2 � R1; L + l = 2�R1N and U = R1w, where R1 and R2 are rotor and stator, N is
the number of blades in a cross section of the SSHE, and ! is the angular speed of the rotor.
The limit lL !1 shows the case of single blade in the channel and H
hp!1 represents �rocker
bearing in classical lubrication theory which is studied by Riamondi et al. [64].
Let � denote the angle of inclination of the blade to the x-axis. If j�j � 1, then tip of the
blade is given by y = h(x), where
h(x) = hp � �(xp � x): (2.1)
We also assume that h0 = h(0) and h1 = h(L) such that
h0 = hp � �xp; h1 = hp + �(L� xp); and � =h1 � h0L
: (2.2)
For time independent �ow the blades are in equilibrium with respect to the forces due to
the �uid, the pivot, and the wall of the channel. Firstly, consider the cases when the ends of
the blades are not in contact with the channel walls, so that h0 > 0; h1 < H:
Denote the velocities, pressures, volume �uxes and stream functions respectively by uki+vkj;
12

pk; Qk and k; where subscript k (= 1; 2; 3) give three di¤erent regions: region 1, 0 � x � L;
0 � y � h that is the region below the blade, k = 2 region 2, 0 � x � L; h � y � H this is the
region above the blade and k = 3 region 3, L � x � L + l; 0 � y � H. Here magnetic �eld is
taken in region 1 and region 3.
The constitutive equations of motion for a Newtonian �uid are
r:V = 0; (2.3)
�dV
dt= div � + �b; (2.4)
where � is the density, b is the body force and � is Cauchy stress tensor such that
� = �pI+ �A1: (2.5)
A1 is the �rst Rivlin Ericksen tensor de�ned as
A1 =rV+(rV)T ; (2.6)
The velocity �eld of the form is considered
V = [u (x; y) ; v (x; y) ; 0] (2.7)
Equations of motion for electrically conducting Newtonian �uid using lubrication approxi-
mation theory i.e.
@
@x<<
@
@yand v << u
are
@2uk@y2
� B2��
�uk =
1
�
@pk@x
; (2.8)
@pk@y
= 0: (2.9)
13

Eq. (2.9) implies that pk 6= pk(y); therefore pk = pk(x) only. Then equation of motion (2:8)
can be written as
@2uk@y2
� B2��
�uk =
1
�
dpkdx
; k = 1; 2; 3. (2.10)
The appropriate no slip boundary conditions are
u1 = U at y = 0; u1 = 0; at y = h; (2.11)
u2 = 0 at y = h; u2 = 0 at y = H; (2.12)
in 0 � x � L; and
u3 = U at y = 0; u3 = 0 on y = H; (2.13)
in L � x � L+ l:
Introducing dimensionless parameters
x = Lx; y = hpy � = h�L , l = Ll; xp = Lxp; H = hpH; h0 = hph0;
h1 = hph1; uk = Uuk; pk =�ULh2p
pk; Qk = Uhp; Qk; k = Uhp k;
fFx; F0; FHg = �ULhpfF x; F 0; FHg; Fy = �UL
h2pF y; M = B�
hp
q�� ;
9>>>>=>>>>; (2.14)
whereM = B�hp
q�� is Hartmann number, then Eq. (2:10) after ignoring bar sign for convenience
becomes
@2uk@y2
�M2uk =dpkdx
: (2.15)
The associated no slip boundary conditions for k = 1; 2; 3 are
u1 = 1 at y = 0; u1 = 0; at y = h; (2.16)
14

u2 = 0 at y = h; u2 = 0 at y = H; (2.17)
in 0 � x � 1; and
u3 = 1 at y = 0; u3 = 0 at y = H; (2.18)
in 1 � x � 1 + l:
2.2 Solution of the Problem
Solving Eq. (2.15) for uk (k = 1; 2; 3) subject to conditions (2.16) - (2.18), leads to the solutions
u1 =e�My
�ehM � eMy
�(�1 + coth[hM ])[�p1x � eM(h+y)p1x +
�ehM + eMy
� �M2 + p1x
�]
2M2;
(2.19)
u2 = �p2x2(H � y)(y � h); (2.20)
and
u3 =e�My
�eHM � eMy
�(�1 + coth[HM ])
��p3x � eM(H+y)p3x +
�eHM + eMy
� �M2 + p3x
��2M2
:
(2.21)
The volume �uxes (per unit width) in the three regions are given by
Q1 =
hZ0
u1@y; (2.22)
or
Q1 =�hMp1x +
�2p1x +M
2�tanh
�hM2
�M3
; (2.23)
and
15

Q2 =
HZh
u2@y; (2.24)
or
Q2 = �p2x12[H � y]3 ; (2.25)
Q3 =
HZ0
u3@y; (2.26)
or
Q3 =�HMp3x +
�2p3x +M
2�tanh
�HM2
�M3
: (2.27)
Expressions for pressure gradient from (2:23)-(2:27) are therefore
p1x = �M2
�MQ1 � Utanh
�hM2
��hM � 2tanh
�hM2
� ; (2.28)
p2x =�12Q2�(H � h)3 ; (2.29)
and
p3x = �M2
�MQ3 � tanh
�HM2
��HM � 2tanh
�HM2
� : (2.30)
It is observed that p3x is constant, whereas p1x and p2xvaries with x. In view of Eqs. (2:28) -
(2:30) ; the Eqs. (2:19)� (2:21) yield
u1 =e�My
�ehM � eMy
�2�hM � 2tanh
�hM2
�� h1 +MQ1 + ehM (�1 + hM �MQ1)
+eMy(1 + hM �MQ1) + eM(h+y)(�1 +MQ1)
i(�1 + coth[hM ]); (2.31)
16

u2 =6Q2 [H � y] (y � h)
(H � h)3 ; (2.32)
u3 =e�My
�eHM � eMy
�2�HM � 2tanh
�HM2
�� �1 +MQ3 + eHM (�1 +HM �MQ3)+
eMy(1 +HM �MQ3) + eM(H+y)(�1 +MQ3)
i(�1 + coth[HM ]): (2.33)
It is worth mentioning that for M = 0 in Eqs. (2:31) -(2:33), the results of Du¤y et al. [25]
are recovered.
The stream function 1; 2; and 3 satisfy the relations
@ 1@y
= u1;@ 2@y
= u2 ; 1 = 0 at y = 0; 2 = Q1 at y = h; (2.34)
in region 0 � x � 1; and
@ 3@y
= u3 ; 3 = 0 at y = 0; (2.35)
in region 1 � x � 1 + l: Therefore
1 =1
((�1 + ehM )M (2 + hM + ehM (�2 + hM)))
h1 + hM + eM(h+y)(1�MQ1)�
eM(h�y)(1 +MQ1) + eMy(�1� hM +MQ1) + e
2hM�My(1� hM +MQ1)
+2ehMM(Q1 + y)�M(Q1 + y +MQ1y) + e2hM (�1 +M(h�Q1 � y +MQ1y)
i; (2.36)
2 = Q1 +Q2(y � h)2 [3H � h� 2y]
(H � h)3 ; (2.37)
17

3 =1
((�1 + eHM )M (2 +HM + eHM (�2 +HM))) �h1 +HM + eM(H+y)(1�MQ3)
�eM(H�y)(1 +MQ3) + eMy(�1�HM +MQ3) + e
2HM�My(1�HM +MQ3)
+2eHMM(Q3 + y)�M(Q3 + y +MQ3y) + e2HM (�1 +M(H �Q3 � y +MQ3y)
�:
(2.38)
The results Du¤y et al. [25] are obtained from Eqs. (2:36) - (2:38) for M = 0 .
The global mass conservation yields
Q1 +Q2 = Q3; (2.39)
which is consistent with the fact that the wall y = H consists of the streamline 2 = Q1 +Q2
in 0 6 x < 1 and the streamline 3 = Q3 in 1 6 x 6 1 + l:
It is observed from Eq. (2.9) that the pressure in each region is independent of y. Suppose
that pressure is continuous at the ends of the blades, so that
p1(1) = p2(1) = p3(1) = pL; (2.40)
and
p1(0) = p2(0) = p3(1 + l) = p0: (2.41)
Therefore
p1 = �(h� h1)
�hh1
��12 + hh1M2
�+ 12(h+ h1)Q1
�2h2h1
2�+ pL; (2.42)
p2 =6�Q2�
[1
(H � h0)2� 1
(H � h1)2] + pL; (2.43)
18

p3 =M2(MQ3cosh
�HM2
�� 2sinh
�HM2
�)
HMcosh�HM2
�� 2sinh
�HM2
� (L� x) + pL: (2.44)
Setting x = 0 in Eq. (2:42)� (2:43) and x = 1+ l in Eq. (2:44) ; and then using Eq.(2:41) ;
the following three representations of p0 � pL are obtained,
p0 � pL =�12
�1
h1� 1
h0
��12
�1
h1+1
h0
�Q1 �
�12� h0h1M2
��; (2.45)
p0 � pL = 6Q2�
1
(H � h1)2� 1
(H � h0)2
�; (2.46)
p0 � pL =�M2
�MQ3cosh
�HM2
�� sinh
�HM2
��l�
HMcosh�HM2
�� 2sinh
�HM2
�� : (2.47)
The moment of forces on the blades about the pivot due to the pressure is of the form
M1 =M1k;
where
M1 =
LZ0
(x� xp) (p1 � p2) dx: (2.48)
Equation (2.48) reduces to the equation for blades in equilibrium for M1 = 0: Thus
(h0 � h1)12h0
2h1
�h0h1
��36(2 + h0 � h1) + h0(h0 � h1)(�3 + h0 + 2h1)M2
��
36((�2 + h1)h1 + h0(2 + h1))Q1]� 72h02h1(1 +Q1)log[h0h1] +
3Q2(H � h0)2(H � h1)
(h0 � h1)�2H2 � (2� h1)h1 + h0(2 + h1)�H(3h0 + h1)
�+ 2(H � h0)2(H � h1) log
H � h0H � h1
= 0:
(2.49)
19

2.3 Qualitative Features of the Flow
The qualitative features of the �ow can be described with the help of the calculated solution as
under. From Eqs. (2:31)� (2:33) it is noted that u2 is of one sign for all x, whereas the sign of
u1 and u3 may change, that is, there may be back �ow in region 1 and 3. Particularly, u1 = 0
not only on the blade y = h but also on the the curve y = y01(x); where
y01 =1
MLog
��1�MQ1 + e
hM (1� hM +MQ1)
1 + hM �MQ1 + ehM (�1 +MQ1)
�: (2.50)
Moreover Eq. (2:33) shows that the position y = y03 6= H; where u3y = 0 is given by
y03 =HM � 2coth[HM ] + 2cosech[HM ]
M(�1 +HMcoth[HM ]�MQ3coth[HM ] +MQ3cosech[HM ]); (2.51)
and the position y = ym3 where u3y = 0 is given by
ym3 =�1 +M(H �Q3)coth[HM ] +MQ3cosech[HM ]
M�M(H �Q3)� tanh
�HM2
�� : (2.52)
Thus, in the regions 0 < y03 < H and 0 < ym3 < H there is back �ow near the upper wall
y = H.
2.4 Forces on the Blades and the Walls
If Fx and Fy are the per unit width drag and lift forces respectively in the x and y direction
acting on the blades due to the �uid, then
Fx = �1Z0
(
�@u1@y
� @u2@y
�y=h
dx� �1Z0
(p1 � p2)dx; (2.53)
Fy =
1Z0
(p1 � p2)dx: (2.54)
Thus
20

Fx =(h1 � h0)
�
�1
h1h0(6Q1 +
h02M2
2880
��480h0 + h03M2 + 1440Q1
�) +
6Q2(H � h1)2
+
�h0h1
�24 + h1(�h0 + h1)M2
�+ 24(�h0 + h1)Q1
�4h0h1
2 + 6Log[h1h0]
#; (2.55)
and
Fy =1
�2
"(h1 � h0)
(�h0h1
�24 + h1(�h0 + h1)M2
�+ 24(�h0 + h1)Q1
�4h0h1
2
+6(h1 � h0)Q2
(H � h0)(H � h1)2
�� Log
�h1h0
��: (2.56)
The force (per unit width) in the x-direction on the portion 0 � x � 1 + l of the lower wall
y = 0 due to the �uid is
F0 =
1Z0
�@u1@y
�y=0
dx+
1+lZ1
�@u3@y
�y=0
dx; (2.57)
or
F0 =1
�
�(h1 � h0)
�Q1(
6
h1h0� 12M2) +
1
12(h1 + h0)M
2 +M4
2880(h21 + h
20)(h1 + h0)
��4Log[h1
h0]
�+ 2
M(1 +M(Q3 �H)coth[HM ]�MQ3cosech[HM ])
HM � 2tanh�HM2
� l: (2.58)
Similarly, the force (per unit width) in the x-direction on the portion 0 � x � 1 + l of the
upper wall y = H due to the �uid is
FH = �1Z0
�@u2@y
�y=H
dx�1+lZ1
�@u3@y
�y=H
dx; (2.59)
or
21

FH =6Q2(h1 � h0)
�(H � h0)(H � h1)+Mh1� e2HM +M
���1 + eHM
�2Q3 + 2e
HMH�i
(�1 + e2HM )�HM � 2tanh
�HM2
�� l: (2.60)
Du¤y et al. [25] have pointed out that the pivot must exert forces �Fx and �Fy on the
blade in order to maintain its equilibrium. Likewise, forces �F0 and �FH must be exerted on
the walls y = 0 and y = H respectively to maintain the �ow. Dimensional estimates of the
torque and power (per unit length in the axial direction) required to turn the rotor of the SSHE
are therefore provided by �NF0R1 and �NF0U respectively, where again R1 is the radius of
the rotor and N = 2�R1L+l is the number of blades.
2.5 Contact Between the Blade and a Channel Wall
Suppose that the blade touches the moving wall at y = 0. Thus at the left end x = 0, so that
h0 = 0, and as a consequence Q1 = 0 and Q2 = Q3 = Q, (say). The blade could alternatively
contact the walls at x = 0, y = H, at x = 1, y = 0, or at x = 1, y = H, but these cases are
of less importance to a real SSHE, and so we will not consider them, except to say that the
solution for a case when the blade just touches the stationary wall y = H may be obtained
simply by taking the appropriate (regular) limit of the results in Sect. 2.2.
Now, consider position of the blade of the form
y = h(x);
where
h(x) = �x; (� > 0): (2.61)
Eqs. (2:15)-(2:47) again hold (with h0 = 0, Q1 = 0, and h1 = � < H), apart from Eq.
(2.41) that must be replaced by
p2(0) = p3(1 + l) (= p0; say): (2.62)
22

Eqs. (2.46)-(2.47) become
Q =H2lM2(H � �)2 sinh
�HM2
�HM (H (12 + lM2(H � �)2)� 6�) cosh
�HM2
�+ 12(�2H + �)sinh
�HM2
� ; (2.63)
p0 � pL =6lM2(2H � �)sinh
�HM2
�HM (H (12 + lM2(H � �)2)� 6�) cosh
�HM2
�+ 12(�2H + �)sinh
�HM2
� : (2.64)
There is back �ow in the region 0 � y � h under the blade which is also studied by Du¤y
et al. [25], with u1y = 0 on y = ym3 =23h and u1 = 0 on y = y01 =
13h. Also, y03 and ym3 as
discussed in Eqs. (2.51) and (2.52) for this case are given by
y03 =H � 2tanh[HM2 ]
M
�1 + c1; (2.65)
where
c1 =HM
��2�H�24 + lM2(H � �)2
�� 12�
�cosh
�HM2
�+�H�12 + lM2(H � �)2
�� 6�
�2HM (H (12 + lM2(H � �)2)� 6�) cosh
�HM2
�+ 24(�2H + �)sinh
�HM2
��HMcosh[HM ]cosech
�HM
2
�+ 2sech
�HM
2
���;
and
ym3 =�1 +M(H �Q3)coth[HM ] +MQ3cosech[HM ]
M�M(H �Q3)� tanh
�HM2
�� : (2.66)
But this solution has some drawbacks. Eqs. (2.31) and (2.42) show that when the limit
x! 0
@u1@y
����y=0
= �M�1 + hM + e2hM (�1 + hM)
�(�1 + coth[hM ])
2�hM � 2tanh
�hM2
�� ! �1; (2.67)
23

@u1@y
����y=h
=�e�hMM
�ehM � e3hM � e2hM (1� hM)� e2hM (1 + hM)
�(1� coth[hM ])
2�hM � 2tanh
�hM2
�� !1;
(2.68)
p1 = �(h� �)
��12 + hM2�
�2h�2
! �1; (2.69)
and the forces Fx, Fy and F0 becomes in�nite. Moreover, there is an in�nite moment M1 on
the blade about a pivot at x = xp tending to keep it in contact with the wall.
Several alternative modelling assumptions may be used to get rid of these singularities,
namely, allowing slip at solid boundaries, or by taking non-Newtonian �uid, or cavitation in
region of low pressure. Silliman et al. [65] showed that stress singularity in viscous �ow can be
removed by taking slip condition at boundaries. Weidner et al. [66] showed that this can be
done by taking Power law �uid. In section 2.7, Silliman et al. [65] approach is used by allowing
slip at the rigid boundaries.
2.6 Graph and Discussion
The steady isothermal incompressible �ow of an electrically conducting Newtonian �uid in a
scraped surface heat exchanger is studied. The gap between blades and walls of the scraped
surface heat exchanger is assumed to be narrow. Lubrication approximation theory is employed
to simplify the equations of motion. E¤ects of di¤erent �ow parameters on the velocity pro�le,
stream function and on the volume �ow rates are presented. Figure 2.2 shows the e¤ect of
increasing the value of magnetic parameter M on velocity �eld. It is observed that velocities
in region 1 and region 3 decreases with an increase in the value of parameter M which show
that magnetic parameter can be used to control the �ow: Figure 2.3 shows e¤ect of pressure
gradient on the velocity pro�les. It is seen that velocity pro�les increases with an increase in
the value of pressure gradient. In Figure 2.3 parabolic velocity pro�les are obtained in di¤erent
stations inside SSHE which are in broad agreement with the experimental results obtained by
MRI on an �idealized� SSHE geometry [1]. Figure 2.4 and Figure 2.8 show the stream line
pattern inside SSHE which re�ects velocity distribution inside the device. Figure 2.5 shows
24

Figure 2.2: E¤ect of Magnetic �eld on velocity pro�le taking H = 2:1; l = 2; xp = 0:49;� = 1:25322; M = 2; x = 1; p1x = p2x = �2:
plot of p1 � pL and p2 � pL as a function of x: Figure 2.6 shows the force F0 on the moving
wall y = 0 as a function of xp and H respectively. Each of the plots of F0 is symmetric about a
maximum xp =12 : It is noted that these graphs are in good agreement with the result obtained
by Du¤y et al. [25]. Figure 2.7 shows plot of �ow rate for di¤erent values of l: It is observed
that volume �ow rate pro�les are symmetric about xp = 12 :
2.7 MHD Flow of Newtonian Fluid in a Scraped Surface Heat
Exchanger with Slip
In this section an electrically conducting Newtonian �uid with slip along the lower wall y = 0
and the lower face y = h� of the blade, with relative velocity proportional to the local shear
rate [67] and [68] is studied. Moreover, it is assumed that there is no slip at y = h+ at the
blade and at the upper wall y = H:
Now, h(x) is taken of the form (2.61), and therefore, Q1 = 0 and Q2 = Q3:
The slip boundary conditions are
u1 � U = b�u1y at y = 0; u1 = �b�u1y at y = h; (2.70)
u2 = 0 at y = h; u2 = 0 at y = H; (2.71)
25

Figure 2.3: E¤ect of pressure gradient on velocity pro�le taking H = 2:1; l = 2; xp = 0:49; � =1:25322;M = 2; x = 1:
Figure 2.4: Stream line patterns in region 1-3 taking M = 2, H = 1:7; l = 2; xp = 0:49; � =1:25322: (a) represents stream line patterns in region 1 (below the thick line) and region 2(above the thick line) while (b) represents stream line patteren in region 3.
26

Figure 2.5: Plots of p1 � pL and p2 � pL taking M = 2, H = 1:7; l = 2; xp = 0:49; � = 1:25322:
Figure 2.6: E¤ect of force on moving wall taking (a) M = 2, H = 1:7 and (b) M = 2; l = 100:
27

Figure 2.7: Volume �uxes in region 1-3 taking M = 2, H = 3 , l = 0; 0:1; 0:25; 0:5; 1; 2;4; 1000:
28

Figure 2.8: Stream line patterns in region 1-3 taking M = 2;H = 3; l = 12 ; xp = 0:595; � =
�1:48967: (a) represents stream line patterns in region 1 (below the thick line) and region 2(above the thick line) while (b) represents stream line patteren in region 3.
in 0 � x � L; and
u3 � U = b�u3y at y = 0; u3 = 0 at y = H; (2.72)
in L � x � L+ l; where b� is a slip parameter. For simplicity, b� is taken to be constant for twoboundaries y = 0 and y = h�:
Using nondimensional parameters (2:14) ; Eqs. (2:71)-(2:72) become
u1 � 1 = b�u1y at y = 0; u1 = �b�u1y at y = h; (2.73)
u2 = 0 at y = h; u2 = 0 at y = H; (2.74)
in 0 � x � 1; and
u3 � 1 = b�u3y at y = 0; u3 = 0 at y = H: (2.75)
29

Solving the equation (2:15) under the boundaries conditions (2:73) - (2:75) to obtain
u1 =1
M2��(�1 +Mb�)2 + e2hM (1 +Mb�)2� � e�My
hehMp1x(�1 +Mb�) + e2My
�M2 + p1x
�(�1 +Mb�) + eMyp1x(�1 +Mb�)2 + eM(h+2y)p1x(1 +Mb�)+e2hM
�M2 + p1x
�(1 +Mb�)� eM(2h+y)p1x(1 +Mb�)2i ; (2.76)
u2 =6Q2(H � y)(y � h)
(H � h)3 ; (2.77)
u3 =e�My
�eHM � eMy
�M2
��1 +Mb� + e2HM (1 +Mb�)�
heHM
�M2 + p3x
�+ eMy
�M2 + p3x
�+ p3x(�1 +Mb�)
�eM(H+y)p3x(1 +Mb�)i ; (2.78)
Q1 =�p1x
�2 + hM � hM2b� + ehM (�2 + hM(1 +Mb�))�+ ��1 + ehM�M2
M3�1�Mb� + ehM (1 +Mb�)� ; (2.79)
Q2 = �p2x12(H � y)3; (2.80)
Q3 =�2eHM
M3��1 +Mb� + e2HM (1 +Mb�)� �2p3x +M2+
�p3x
��2 +HM2b���M2
�cosh[HM ] +Mp3x(H � b�)sinh[HM ]i (2.81)
and
p1x =
��1 + ehM
�M2
2� 2ehM + hM + ehMhM � hM2b� + ehMhM2b� ; (2.82)
30

p2x =�12Q2(H � h)3 ; (2.83)
p3x =e�HMM2
2�2� 2cosh[HM ] +HM2b�cosh[HM ] +HMsinh[HM ]�Mb�sinh[HM ]��
eHM�eHMMQ3 + 2 + e
HMM2Q3b� � 2cosh [HM ]��MQ3 +M2Q3b�� : (2.84)
It is obvious that p3x is constant, whereas p1x varies with x. Now Eqs.(2:76) - (2:78) yield
u1 =1�
�1 +Mb� + ehM (1 +Mb�)��2 + h�M �M2b��+ ehM (�2 + hM(1 +Mb�))� �e�My
�ehM + 2eM(h+y) + eM(h+2y) + eMy(�1 +Mb�)� eM(2h+y)(1 +Mb�)+
e2My(�1 + hM(�1 +Mb�)) + e2hM (�1 + hM(1 +Mb�� ; (2.85)
u2 =6Q2(H � y)(y � h)
(H � h)3 ; (2.86)
u3 =e�M(H+y)
�eHM � eMy
� �1� eHM (1�HM +MQ3)+
2�2 +
��2 +HM2b�� cosh[HM ] +M(H � b�)sinh[HM ]�
eMy(1 +HM �MQ3) +MQ3(1�Mb�) + eM(H+y)(�1 +MQ3(1 +Mb�))� ;(2.87)
1 =e�My
��ehM + eM(h+2y) + 2eM(h+y)My
M��1 +Mb� + ehM (1 +Mb�)��2 + h�M �M2b��+ ehM (�2 + hM(1 +Mb�))�
+e2My(�1 + hM(�1 +Mb�)) + eMy(1�M(h� y)(�1 +Mb�))+e2hM (1� hM(1 +Mb�)) + eM(2h+y)(�1 +M(h� y)(1 +Mb�))� ; (2.88)
31

2 =Q2(y � h)2(3H � h� 2y)
(H � h)3 ; (2.89)
3 =
�e�M(H+y)
�e2My(�1�HM +MQ3)) + e
2HM (1�HM +MQ3)
2M�2 +
��2 +HM2b�� cosh[HM ] +M(H � b�)sinh[HM ]�
+2eM(H+y)M(Q3 + y) + eMy�1 +HM �M(Q3 + y +MQ3y) +M
3Q3yb��+eHM (�1 +MQ3(�1 +Mb�)) + eM(H+2y)(1�MQ3(1 +Mb�))+
eM(2H+y)(�1 +M(H � y +Q3(�1 +My(1 +Mb�))))� ; (2.90)
p1 =
�M2Ub��(h� h1)� 2U�Log[h1 �h+ 6b� � 3hM2b�2�h�h1+6b��3h1M2b�2� ]
2�b� + pL; (2.91)
p2 =6�Q2�
[1
(H � h1)2� 1
(H � h)2] + pL; (2.92)
p3 = �e�HM
�M2 �MQ3 + e
2HMMQ3 + 2eHM
2�2� 2cosh[HM ] +HM2b�cosh[HM ] +HMsinh[HM ]�Mb�sinh[HM ]�
+M2Q3b� + e2HMM2Q3b� � 2eHMcosh[HM ]i (x� L): (2.93)
Setting x = 0 in Eqs. (2:91)-(2:92) and x = 1 + l in Eq. (2.93) and using Eq. (2.40) to get
p0 � pL =6Q2�
�1
(H � h1)2� 1
H2
�
= �e�HMM2
�Q3M
��1 + e2HM +Mb� + e2HMMb��+ 2eHM (1� cosh[HM ])�
2�2� cosh[HM ]
�2�HM2b��+Msinh[HM ]�H � b��� l; (2.94)
which gives
32

Q2 = Q3 =
���1 + eHM
�2H2(H � h1)2lM2�
�2eHM (�12h1(�2H + h1)�
(1 + e2HM )�12h1
2 +H2M2 (12h1 + (H � h1)2lM2�) b��+�6Hh1
�4 + h1M
2b�� cosh[HM ] +M (H(6(2H � h1)h1
+�H(H � h1)2lM2�
�+ 6h1(�2H + h1)b�sinh[HM ]�� : (2.95)
Using Eq. (2:95) in Eq. (2:94) to get
p0 � pL =�6(2H � h1)h1lM2(�1 + cosh[HM ])
�(12(2H � h1)h1 + (12h1(�2H + h1)+
+HM2�6(2H � h1)h1 +H(H � h1)2lM2�
� b�)cosh[HM ] +M�H�6(2H � h1)h1 +H(H � h1)2lM2�
�+ 6h1(�2H + h1)b�� sinh[HM ]� : (2.96)
By putting b� = 0 in Eqs. (2:70)-(2:96), the results for velocities, stream functions, pressure
rise and �uxes are in good agreement with the results as obtained in the no-slip case.
Eq. (2.85) shows that there is back �ow in the region at 0 � y � h under the blade, with
u1y = 0 at y = ym1 and u1 = 0 at y = y01 where
ym1 =1
C2
�M2
�1�Mb� + e2hM (1 +Mb�)� 2h��6b� + h��1 + 3M2b�2����
�1 + ehM���1 +Mb� + ehM (1 +Mb�)��12 + hM2
��6b� + h��1 + 3M2b�2���� ; (2.97)
C2 =�MM2
��1 +Mb� + e2hM (1 +Mb�)� 2h��6b� + h��1 + 3M2b�2��
��1 + ehM
� ��1 +Mb� + ehM (1 +Mb�)��12 + hM2
��6b� + h��1 + 3M2b�2���� ;
y01 =�M � e2hMM + hM2 + e2hMhM2 � hM3b� + e2hMhM3b� � C3 (2.98)
and
33

C3 =
vuuuuuuutM2
��1 + h
�M �M2b��+ e2hM (�1 + hM(1 +Mb�))�2 � 2(�1 + 2ehM
+hM(�1 +Mb�) + e2hM (�1 + hM(1 +Mb�)))��2 + 4ehM +Mb� + hM(�1 +Mb�)+e2hM (�2�Mb� + hM(1 +Mb�))�� :
The slip velocities on y = 0 and y = h� are
u1 jy=0 = 1�Mb� �1 + h�M �M2b��+ e2hM (�1 + hM(1 +Mb�))��
�1 +Mb� + ehM (1 +Mb�)��2 + h�M �M2b��+ ehM (�2 + hM(1 +Mb�))� ;(2.99)
u1��y=h� =
e�hMMb� �ehM � e3hM + e2hM (�1 + hM(1 +Mb�)) + e2hM �1 + h�M �M2b������1 +Mb� + ehM (1 +Mb�)��2 + h�M �M2b��+ ehM (�2 + hM(1 +Mb�))� :
(2.100)
Slips velocities vanishes as the corner at x = 0 is approached.
Fx =1
192���1 + 3M2b�2�
"1
(H � h1)2b�4�h1
��1 + 3M2b�2���3(H � h1)2h13 + 8(H � h1)2h12b�+
(H � h1)2h1��24 + h12M2
� b�2 + 96(H � h1)2b�3 � 24 ��48Q2 + (H � h1)2h1M2� b�4��
�576Log"h1 + 6b� � 3h1M2b�2
6b�##
; (2.101)
Fy =1
�3
[(h21(�24Q2 +H(H � h1)2M2(�1 + 3M2b�2) + 24H(H � h1)2Log[h1+6b��3h1M2b�26b� ]
4H(H � h1)2(�1 + 3M2b�2) ;
(2.102)
34

F0 =1
192�
24 1b�4 ��1 + 3M2b�2��h21
��1 + 3M2b�2�� 8h1b� � 96b�3 + h12 �3�M2b�2�
+24�b�2 +M2b�4��� 576Log "h1 + 6b� � 3h1M2b�2
6b�#!
+1
2 +��2 +HM2b�� cosh[HM ] +M(H � b�)sinh[HM ] �
96e�HM lM���1 + e2HM
�+M
���1 + eHM
�2Q3 �
�1 + e2HM
�H��i
; (2.103)
FH =6Q2h1
�H(H � h1)+
1
2�2 +
��2 +HM2b�� cosh[HM ] +M(H � b�)sinh[HM ]� :
e�2HMM�MQ3 � (1 +HM)) + e2HM (1 +M(Q3 �H)) + eHM (�1 +MQ3(�1 +Mb�))
+e3HM (1�MQ3(1 +Mb�))� ; (2.104)
M1 =1
6�1� 3M2b�2�2
��6h12
�1� 3M2b�2�2 log6 + b� � h1 ��1 + 3M2b�2�
�36 + h1(h1 � 3)M2
��1 + 3M2b�2��+ 216b�log6) + 6��1 + 3M2b�2� ��
�12b� + h12 ��1 + 3M2b�2�� log 6b�h1 + 6b� � 3h1M2b�2
!+ 6
�36b�2 � h12 �1� 3M2b�2�2�!
log
�6 + h1
�1b� � 3M2b���� 3Q2
�h1��2H2 + 3Hh1 � 2h1
�+ 2H(H � h1)2(log H
H�h1
�H(H � h1)2�3
:
(2.105)
2.8 Conclusion
In this chapter a mathematical model of electrically conducting �uid �ow in a scraped surface
heat exchanger in the presence of transverse magnetic �eld is studied. Lubrication approxi-
mation theory for the problem under consideration has been applied as the gap between the
35

blades and device walls is narrow. Magnetic �eld e¤ect can be signi�cant in studying �ow
properties inside SSHE so steady isothermal �ow of a electrically conducting Newtonian �uid
around a periodic array of pivoted scraper blade in a channel in which lower wall is moving and
upper wall is at rest, when there is an applied pressure gradient in a direction perpendicular
to the wall motion is considered. Two dimensional �ow in a transverse section of SSHE is
considered. In this work details of the �ow properties in the presence of magnetic �eld with no
slip condition is presented. Secondly magnetic �eld e¤ect with slip at the boundaries is also
incorporated. Expressions for velocity pro�les for di¤erent regions inside SSHE, the possible
presence of regions of reversed �ow under the blades, �ow rates, stream functions, and forces
on the wall and on the blade are obtained. Graphs for velocity pro�le and for di¤erent �ow
parameter involved are included.
It is noted that locating the pivot su¢ ciently near the end x = 1 (as is usually used in SSHE
design) will ensure that the blade tip at x = 0 will de�nitely make the desired contact with the
scraped surface. However, the solution in this case predicts that the forces on the blades are
singular and that an in�nitely large torque is required to turn the rotor. In order to get rid of
these singularities, slip at the boundaries is taken into account.
Work presented in this work will provide quantitative understanding of some basic features of
the �uid �ow within a SSHE and will provide a basis for subsequent studies of more complicated
physical e¤ects.
36

Chapter 3
Flow of a Second Grade Fluid in a Scraped Surface
Heat Exchanger
In this chapter a mathematical model of the �ow of a second grade �uid inside scraped surface
heat exchanger is developed and studied theoretically. Steady incompressible isothermal �ow
of a second grade �uid is considered about a sequence of pivoted scraper blades in a channel
in which lower wall is moving and upper wall is stationary. Flow properties, namely velocities,
stream functions, �ow rates, expressions for pressure, the forces on the blades and walls in
di¤erent stations of device are investigated. Graphic representation of di¤erent �ow parameters
involved is also incorporated.
3.1 Problem Formulation
Steady isothermal incompressible �ow of a second grade �uid in a porous channel of breadth H,
in which there is a sequence of inclined smoothly pivoted thin plane blades is taken. The lower
boundary of the channel at y = 0 is in motion with velocity U , the wall at y = H is stationary.
The constitutive equations of motion for a second grade �uid are
r:V = 0; (3.1)
37

�dV
dt= div �+�b; (3.2)
where � is the density, b is the body force and � [31] is Cauchy stress tensor such that
� = �pI+ �A1 + �1A2 + �2A21; (3.3)
in which � is the dynamic viscosity, �1, �2; are material constants, A1 is de�ned in chapter 2
A2 second Rivlin Ericksen tensor (or rate of strain tensor) de�ned as
A2 =@A1@t
+ (rV)T A1 +A1rV; (3.4)
where V is the velocity �eld, T is transpose.
Velocity �eld for studying �ow inside the porous channel is
V = [u(x; y); v0; 0]; (3.5)
where v0 > 0 is for injection, and v0 < 0 is for suction.
The Eq. (3.2) in view of the velocity �eld (3.5) and LAT yields
�v0@uk@y
= �@pk@x
+ �@2uk@y2
+ �1v0@3uk@y3
; (3.6)
0 = �@pk@y
+ (2�1 + �2)@
@y
�@uk@y
�2: (3.7)
De�ne modi�ed pressure gradient as
bpk = pk � (2�1 + �2)�@uk@y
�2;
then Eqs. (3:6)-(3:7) become
�v0@uk@y
= �@bpk@x
+ �@2uk@y2
+ �1v0@3uk@y3
; (3.8)
38

0 = �@bpk@y
: (3.9)
Eq. (3.9) implies that bpk 6= bpk(y) therefore bpk=bpk(x) only. Thus, Eq. (3:8) becomes�v0
@uk@y
= �dbpkdx
+ �@2uk@y2
+ �1v0@3uk@y3
: (3.10)
The appropriate boundary conditions are
u1 = U; u01 = 0 at y = 0; u1 = 0; at y = h; (3.11)
u2 = 0 u02 = 0 at y = h; u2 = 0 at y = H; (3.12)
in 0 � x � L; and
u3 = U u03 = 0 at y = 0; u3 = 0 on y = H; (3.13)
in L � x � L+ l:
Using dimensionless parameters de�ned in Eq. (2:14) and following parameters
� =�1v0hp
;Re =�v0hp�
:
then the Eqs. (3:10) to (3:13) after neglecting the bar sign for simplicity yield
�@3uk@y3
+@2uk@y2
� Re @uk@y
=dpkdx
; k = 1; 2; 3; (3.14)
the respective boundary conditions are
u1 = 1 u01 = 0 at y = 0; u1 = 0; at y = h; (3.15)
u2 = 0 u02 = 0 at y = h; u2 = 0 at y = H; (3.16)
in 0 � x � 1; and
39

u3 = 1 u03 = 0 at y = 0; u3 = 0 at y = H: (3.17)
in 1 � x � 1 + l:
3.2 Solution of the Problem
Solving Eq. (3.14) subject to boundary conditions (3:15)-(3:17) leads to the solutions
u1 = c1 + c2eA1y + c3e
A2y � p1xy
Re; (3.18)
u2 = c4 + c5eA1y + c6e
A2y � p2xy
Re; (3.19)
u3 = c7 + c8eA1y + c9e
A2y � p3xy
Re; (3.20)
where A1, A2 are variables terms and c1, c2;...,c9 are function of integration and their values
are given in the Appendix B.
The volume �ow rates in three stations of SSHE using Eqs. (2.22), (2.24) and (2.25) are
given by
Q1 =c2��1 + eA1h
�A1
+c3��1 + eA2h
�A2
+ c1h�h2p1x2Re
; (3.21)
Q2 = �c5�eA1h � eA1H
�A1
�2c6�eA2h � eA2H
�Re�A2(h�H)(hp2x +Hp2x � 2c4Re)
2A2Re; (3.22)
Q3 =c8��1 + eA1H
�A1
+c9��1 + eA2H
�A2
+ c7H � H2p3x2Re
: (3.23)
Then, the expressions for pressure gradient from Eqs. (3:21)-(3:23) are
40

p1x =
2
0@A22 �1� eA1h�+A1A22 �eA1h(h�Q1) +Q1��A120@ 1 +A2Q1�
eA2h(1�A2h+A2Q1)
1A1ARe0@ 2A2
��1 + eA1h
� ��1 + eA2h �A2h
��A12h
�2 +A2h+ e
A2h(�2 +A2h)�+
A1��2� 2e(A1+A2)h +A22h2 + eA2h(2� 2A2h) + eA1h(2 +A2h(2 +A2h))
�1A ;
(3.24)
p2x =�(2A1A2Q2Re)26664
�A1A2h2 +A1A2H2 +Re�2A2A5e
A1h + 2A1A7eA2h � 2A2A5eA1H
�2A1A7eA2H + 2A1A2A3h+ 2A2A6eA1hh+ 2A1A8eA2hh
�2A2A6eA1Hh� 2A1A8eA2Hh+ 2A1A2A4h2 � 2A1A2A3H � 2A1A2A4hH�37775;
(3.25)
p3x =
2
0@ A22�1� eA1H
�+A1A2
2�eA1H(H �Q3) +Q3
��
A12�1 +A2Q3�eA2H(1�A2H +A2Q3)
�1ARe
0@ 2A2��1 + eA1H
� ��1 + eA2H �A2H
��A12H
�2 +A2H + eA2H(�2 +A2H)
�+
A1��2� 2e(A1+A2)H +A22H2 + eA2H(2� 2A2H) + eA1H(2 +A2H(2 +A2H))
�1A :
(3.26)
From above equations it is seen that p3x is constant, on the other hand p1x and p2xare function
of x.
The stream function 1; 2; and 3 satisfying Eqs. (2:34)� (2:35) are
1 =�2A2c2Re�2A1c3Re+2A2c2eA1y Re+2A1c3eA2y Re+2A1A2c1Re y �A1A2p1xy2
2A1A2Re;
(3.27)
2 =1
2A1A2Re
24 A1A2h2p2x �A1A2p2xy2 +Re
��2A2c5eA1h � 2A1c6eA2h + 2A2c5eA1y+
2A1c6eA2y � 2A1A2c4h+ 2A1A2Q1 + 2A1A2c4y
�35 ;
(3.28)
41

3 =�2A2c8Re�2A1c9Re+2A2c8eA1y Re+2A1c9eA2y Re+2A1A2c7Re y �A1A2p3xy2
2A1A2Re:
(3.29)
It is extremely di¢ cult to obtain expression for pressures from Eqs. (3:24)-(3:26). To meet
the situation, Maclaurin�s series is employed. Therefore
p1 =1
A1(A1 +A2)�[(A1 �A2)Re(�A1A2Q1log[h] + (2(A1 +A2) +A1A2Q1)log[2(A1 +A2)+
A1A2h] +A1A2Q1log[h1]� (2(A1 +A2) +A1A2Q1)log[2(A1 +A2) +A1A2h1])] + pL; (3.30)
p2 =2A9hQ2 +A10h
2Q2 � 2A9h1Q2 �A10h12Q22�
+ pL; (3.31)
p3 =�A11 +Q3 +A11x�Q3x
A12+ pL: (3.32)
where A3, A4, ..., A12 are variables expressions used for simpli�cation, their vales are given in
Appendix B.
Taking x = 0 in Eqs. (3:30) � (3:31) and x = 1 + l in Eq. (3:32) ; and using Eq. (2:41) to
get three representations of p0 � pL :
p0 � pL =[(A1 �A2)Re(�A1A2Q1logh0 + (2(A1 +A2) +A1A2Q1)log [2(A1 +A2)]
A1(A1 +A2)�
+A1A2h0] +A1A2Q1log[h1]� (2(A1 +A2) +A1A2Q1)log[2(A1 +A2) +A1A2h1])] ; (3.33)
p0 � pL =2A9h0Q2 +A10h0
2Q2 � 2A9h1Q2 �A10h12Q22�
; (3.34)
p0 � pL =l(A11 �Q3)
A12: (3.35)
42

3.3 Forces on the Blade and the Walls
The drag Fx and lift Fy forces respectively in the x- and y-direction acting on the blades are
using Eqs. (2:53)� (2:54) are
Fx =1
36(A1 +A2)�
��(h0 � h1)
�12A1
2 + 24A1A2 +A13(h0 + h1) +A2
2(12 +A2(h0 + h1))
+3A1A22(�A1 +A2)(h0 + h1)Q1
+ 72(A1 +A2)log
h1h0
��
1
6�A12A2(A1 +A2)
[A1A2(A1 +A2)(h0 � h1)(A1(h0 � h1)(3A9 +A10(h0 + 2h1))Q2+
12(A1 �A2)Re) + 6(A1 �A2)Re�A1
2A22h0Q1logh0 � (2(A1 +A2) +A1A2h0)(2(A1 +A2)
+A1A2Q1)log[2(A1 +A2) +A1A2h0]�A12A22h0Q1logh1 + (2(A1 +A2) +A1A2h0)
(2(A1 +A2) +A1A2Q1)log[2(A1 +A2) +A1A2h1]g] : (3.36)
Fy =1
6�A12A2(A1 +A2)
[A1A2(A1 +A2)(h0 � h1)(A1(h0 � h1)(3A9 +A10(h0 + 2h1))Q2+
12(A1 �A2)Re) + 6(A1 �A2)Re�A1
2A22h0Q1Log[h0]� (2(A1 +A2) +A1A2h0)(2(A1 +A2)
+A1A2Q1)Log[2(A1 +A2) +A1A2h0]�A12A22h0Q1Log[h1] + (2(A1 +A2) +A1A2h0)
(2(A1 +A2) +A1A2Q1)Log[2(A1 +A2) +A1A2h1]g] : (3.37)
The force in the x-direction on the portion 0 � x � 1 of the lower boundary y = 0 and
upper boundary at y = H using Eqs. (2:57)-(2:58) respectively are
F0 =�A1c8e
A1y +A2c9eA2y � p3x
Re
�l; (3.38)
43

FH = �1
Re
"A9�A2�1� eA1H
� �1� eA2H
�+A1
��1� e(A1+A2)H+
A1 �A1eA2H +A2 (�1 + eA1H)�
eA2H(1�A2H) + eA1H(1 +A2H)(�h0 + h1)+
1
2
(A9�A1e
A1H �A2eA2H � (A1 �A2)e(A1+A2)H�
(A2 �A2eA1H +A1 (�1 + eA2H))2�A2
2�1� eA1H
�+A1A2
2H �A12�1� eA2H +A2H
��+
A10�A2��1 + eA1H
� ��1 + eA2H
�+A1
��1� e(A1+A2)H + eA2H(1�A2H)
A1 �A1eA2H +A2 (�1 + eA1H)
+eA1H(1 +A2H)�� �
�h02 + h12��Q2 �
hA1c8e
A1H +A2c9eA2H � p3x
Re
il (3.39)
The pivot should put forth forces �Fx and �Fy on the blade to maintain its equilibrium,
likewise forces �F0 and �FH must be applied on the boundaries y = 0 and y = H correspond-
ingly to have the �ow.
3.4 Graph and Discussion
In this section graphical behaviour of various �ow parameters on the velocity pro�le, stream
function and on the volume �ow rates are discussed. Figure 3.1 shows the impact of non-
Newtonian parameter � on velocity pro�les in three stations. It is seen that velocities in all
the stations of SSHE decreases with an increase in the value of parameter � which indicate
the shear thickening behaviour: Figure 3.2 shows e¤ect of pressure gradient on the velocity
pro�les. It is observed that velocity pro�le increases with the increase in the value of pressure
gradient. In Figure 3.3, e¤ect of Reynolds number on velocity pro�le is studied. It is noticed
that velocities in the three regions of SSHE increase with the increase in the values of Reynolds
number which re�ect that Reynolds number can be used as controlling �ow parameter. Figures
3.4 and 3.6 show the stream line pattern indicating velocity distribution inside SSHE. Figure
3.6 shows plot of p1�pL and p2�pL as a function of x: In Figure 3.7, impact of non-Newtonian
parameter on �ow rates is shown. It is observed that �ow increases in region 1 and 3 whereas
�ow in region 2 decreases. Moreover, in Figure 3.1(b)- 3.2(b), 3.3(b) parabolic velocity pro�les
44

are obtained which are in broad agreement with the experimental results obtained by MRI on
an �idealized�SSHE geometry Wang et al. [1].
Figure 3.1: E¤ect of � on velocity pro�les in three region taking H = 3; l = 1; xp = 0:49;� = 1:25322; x = 1; Re = 0:01; p1x = p2x = p3x = �2; � = 1; 2; 3; 4; 5:
45

Figure 3.2: E¤ect of pressure gradient on velocity pro�les taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; x = 1; Re = 0:01; � = 1:
3.5 Conclusion
In this chapter a mathematical model of the �ow of a second grade �uid in SSHE is developed
and analyzed theoretically. LAT is applied to simplify the equations of motion as in the case of
SSHE the aspect ratio and Reynolds number are very small. The foodstu¤s normally acts as
non-Newtonian in nature having shear-thinning, shear-thickening e¤ects, so it is more realistic
to take non-Newtonian model. The �ow of a second grade �uid about a periodic arrangement
of pivoted scraper blade in a channel in which lower boundary is moving and upper wall is
stationery is studied, when pressure gradient is taken in a direction perpendicular to the wall
motion. Details of the �ow properties with no slip condition are studied. Velocity pro�les for
di¤erent regions inside SSHE, �ow rates, stream functions, and forces on the wall and on the
46

Figure 3.3: E¤ect of Reynolds number on velocity pro�les taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; x = 1; � = 1; p1x = p2x = p3x = �2:
blade are obtained. Graphical representation for velocity pro�le and for various important �ow
parameter involved is incorporated.
This work will be helpful in quantitative understanding of some fundamental aspects of the
�uid �ow inside SSHE specially considering non-Newtonian behaviour of foodstu¤ and will give
a basis for further investigations of more complicated physical characteristics.
47

Figure 3.4: Streamline patteren in di¤erent stations of SSHE taking � = 1, H = 1:7; l = 2; xp =0:49; � = 1:25322; Re = 0:01:
Figure 3.5: Streamline patteren in di¤erent stations of SSHE taking � = 1, H = 3; l = 2;xp = 0:595; � = �1:48967; Re = 0:01:
48

Figure 3.6: Plots of p1 � pL and p2 � pL taking � = 1, H = 1:7; l = 2; xp = 0:49; � = 0:5;Re = 2; � = 1: 3.6(b) with � = 1, H = 1:7; l = 2; xp = 0:49; � = 1:25322; Re = 2; � = 2:
Figure 3.7: E¤ect of non-Newtonian parameter on �ow rate taking H = 3; � = 1:25322; l =1; xp = 0:595;Re = 0:01:
49

Figure 3.8: Flow rates taking � = 1, H = 1:75 , Re = 0:01,l = 0:1; 0:25; 0:5; 1; 2; 4; 10:
50

Chapter 4
Flow of a Third Grade Fluid in a Scraped Surface
Heat Exchanger
In this chapter the �ow of a third grade �uid in scraped surface heat exchangers is studied.
Solutions for steady isothermal �ow of the �uid model around a periodic array of pivoted
scraper blade in channel with one moving wall are obtained, when there is an applied pressure
gradient in direction to the wall motion using Adomian decomposition method. Expressions for
velocity pro�les for di¤erent regions, �ow rates, stream functions, forces on the wall and on the
blade are obtained. Graphical representation for studying impact of various �ow parameters
on velocity pro�le, stream lines, �ow rate is incorporated. Foodstu¤ behaves as non-Newtonian
material possessing shear thinning and shear thickening e¤ects. So, for the understanding of
non-Newtonian e¤ects inside SSHE, a third grade �uid model is considered. In addition to food
industry this work will be also helpful in Pharmaceutical and chemical industries as mostly
material used in these industries are non- Newtonian in nature.
4.1 Problem Formulation
Consider a steady isothermal incompressible �ow of a third grade �uid in a channel of width
H containing a periodic array of inclined smoothly pivoted thin plane blades. The �ow is due
to motion of the wall at y = 0 moving with speed U and pressure gradient applied along the
direction perpendicular to the moving wall. The wall at y = H is �xed.
51

The Cauchy stress tensor � for third grade �uid [33] is de�ned as
� = �pI+�A1 + �1A2 + �2A21 + �1A3 + �2(A1A2 +A2A1) + �3(trA21)A1
where �1, �2; �1; �2; �3 are material constants, A1; A2;A3 are Rivlin Ericksen tensors.
Now, Clausius-Duhem inequality and the assumption that the speci�c Helmholtz free energy
is minimum at equilibrium which provides the resistance [45], imply that
� > 0, �1 > 0; j�1 + �2j 6p24��3; �1 = �2 = 0; �3 = � > 0: In view of these assumptions
the Cauchy stress tensor � becomes
� = �pI+�A1 + �1A2 + �2A21 + �(trA21)A1; (4.1)
Equations of motions for a third grade �uid using velocity �eld de�ned in Eq. (2:7) and
LAT become
@2uk@y2
+ 6�
�@uk@y
�2 @2uk@y2
=1
�
@pk@x
; k = 1; 2; 3; (4.2)
and
@pk@y
� @
@y
"(2�1 + �2)
�@uk@y
�2#= 0; k = 1; 2; 3: (4.3)
Eq. (4.3) implies that
@
@y
"pk � (2�1 + �2)
�@uk@y
�2#= 0;
or
@P �k@y
= 0; (4.4)
where P �k = pk � (2�1 + �2)(@uk@y )2:
Eq. (4.4) implies that P �k 6= P �k (y); therefore, Eq. (4.2) can be written as
52

@2uk@y2
+ 6�
�@uk@y
�2 @2uk@y2
=1
�
dP �kdx
: (4.5)
Using dimensionless parameters de�ned in Eq. (2:14)and setting
P �k =�UL
h2ppk; � =
��h2pU2
;
then the Eq. (4:5) after ignoring bar sign for convenience yields
@2uk@y2
+ 6�
�@uk@y
�2 @2uk@y2
=dpkdx
; k = 1; 2; 3: (4.6)
4.2 Solution of the Problem
The Eq. (4.6) is highly non linear di¤erential equation, therefore its analytical solution is
not possible. Adomian decomposition method [46] is employed to solve Eq. (4.6) subject to
boundary conditions (2:16)-(2:18). Re-writing the Eq. (4.6) in the form
Lyy(uk) = �6�(@uk@y)2@2uk@y2
+dpkdx
; k = 1; 2; 3; (4.7)
where Lyy = @2
@y2is di¤erential operator and assumed to be invertible so that
L�1yy =
Z Z(�)@y@y:
Applying L�1yy on both sides of Eq. (4:7) to get
uk = c1 + c2y � 6�L�1yy�(@uk@y)2@2uk@y2
�+ L�1yy
dpkdx
; k = 1; 2; 3: (4.8)
where c1 and c2 are arbitrary functions of integration of x and can be determined using boundary
conditions. According to the procedure of ADM, uk can be written in component form as
uk =1Xn=0
ukn; k = 1; 2; 3: (4.9)
Thus, Eq. (4.8) takes the form
53

1Xn=0
ukn = c1 + c2y � 6�L�1yy
0@ @
@y
1Xn=0
ukn
!2 @2
@y2
1Xn=0
ukn
!1A+ L�1yy dpkdx : (4.10)
Adomian also suggested that the nonlinear terms can be expanded in the form of Adomian
polynomial, say, An given by,
An = (@
@y
1Xn=0
ukn)2
@2
@y2
1Xn=0
ukn
!: (4.11)
Thus, Eq. (4.10) takes the form
1Xn=0
ukn = c1 + c2y � 6�L�1yy (An) + L�1yydpkdx
; k = 1; 2; 3; (4.12)
and the boundary conditions Eq. (2:11)� (2:13) become
1Pn=0
u1n = 1 at y = 0;1Pn=0
u1n = 0; at y = h;
1Pn=0
u2n = 0 at y = h;1Pn=0
u2n = 0 at y = H;
in 0 � x � 1; and1Pn=0
u3n = 1 at y = 0;1Pn=0
u3n = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>>>>=>>>>>>>>>>>>;(4.13)
From recursive relation Eq. (4.12), the zeroth order problem is identi�ed as
uk0 = c1 + c2y + L�1yy
dpkdx
(4.14)
with boundary conditions
u10 = 1 at y = 0; u10 = 0; at y = h;
u20 = 0 at y = h; u20 = 0 at y = H;
in 0 � x � 1; and
u30 = 1 at y = 0; u30 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(4.15)
54

The remaining order problems can be written in the following form:
ukn = �6�L�1yy (An�1) ; n � 1; k = 1; 2; 3 (4.16)
with boundary conditions
1Pn=1
u1n = 0 at y = 0;1Pn=1
u1n = 0; at y = h;
1Pn=1
u2n = 0 at y = h;1Pn=1
u2n = 0 at y = H;
in 0 � x � 1; and1Pn=1
u3n = 0 at y = 0;1Pn=1
u3n = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>>>>=>>>>>>>>>>>>;(4.17)
4.2.1 Zeroth Order Solutions
The Eq. (4.14) along with the boundary conditions (4.15) gives the zeroth order solution as
u10 = �(h� y)(�2 + hp1xy)
2h; (4.18)
u20 =1
2p2x(h� y)(H � y); (4.19)
u30 = �(H � y)(�2 +Hp3xy)
2H: (4.20)
4.2.2 First Order Solutions
For n = 1; Eq. .(4.16) and boundary conditions (4.15) yield
uk1 = �6�L�1yy (A0) ; k = 1; 2; 3; (4.21)
where
A0 =@uk0@y
@2uk0@y2
; k = 1; 2; 3; (4.22)
55

u11 = 0 at y = 0; u11 = 0; at y = h;
u21 = 0 at y = h; u21 = 0 at y = H;
in 0 � x � 1; and
u31 = 0 at y = 0; u31 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(4.23)
Thus using the zeroth order solutions (4.18)-(4:20) and boundary conditions (4.23) to get
u11 = ��(p1xy + 1)
4
2p1x+ 2 + y 3; (4.24)
u21 = ��(p2xy + �1)
4
2p2x+ �2 + y�3; (4.25)
u31 = ��(p3xy + �1)
4
2p3x+ �2 + y�3: (4.26)
4.2.3 Second Order Solution
For n = 2; Eqs. (4.16)-(4.17) yield
uk2 = �6�L�1yy (A1) ; k = 1; 2; 3; (4.27)
where
A1 =
�@uk0@y
�2 @2uk1@y2
+ 2@uk0@y
@2uk0@y2
@uk1@y
; k = 1; 2; 3; (4.28)
and
u12 = 0 at y = 0; u12 = 0; at y = h;
u22 = 0 at y = h; u22 = 0 at y = H;
in 0 � x � 1; and
u32 = 0 at y = 0; u32 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(4.29)
Thus, using the zeroth order solution (4.18)-(4.20) and �rst order solutions (4.24)-(4.26) in
56

Eq. (4.27) along with the boundary conditions (4.29) to obtain
u12 = 2p1x5y6�2 + 12p1x
4y5�2 1 + 30p1x3y4�2 1
2 + 40p1x2y3�2 1
3 + 30p1xy2�2 1
4
� 2p1x2y3� 3 � 6p1xy2� 1 3 + y 4; (4.30)
u22 = 2p2x5y6�2 + 12p2x
4y5�2�1 + 30p2x3y4�2�1
2 + 40p2x2y3�2�1
3 + 30p2xy2�2�1
4
� 2p2x2y3��3 � 6p2xy2��1�3 + �4 + y�5; (4.31)
u31 = 2p3x5y6�2 + 12p3x
4y5�2�1 + 30p3x3y4�2�1
2 + 40p3x2y3�2�1
3 + 30p3xy2�2�1
4
� 2p3x2y3��3 � 6p3xy2��1�3 + y�4: (4.32)
4.2.4 Velocity Pro�le
Using zeroth, �rst and second order solutions in Eq. (4.9), the following results are obtained:
u1 = �(h� y)(�2 + hp1xy)
2h+ 2p1x
5y6�2 + 12p1x4y5�2 1 + 30p1x
3y4�2 12 � �(p1xy + 1)
4
2p1x
+ 2 + 6p1xy2� 1
�5� 1
3 � 3�+ 2p1x
2y3��20� 1
3 � 3�+ y 3 + y 4; (4.33)
u2 =1
2p2x(h� y)(H � y) + 2p2x5y6�2 + 12p2x4y5�2�1 + 30p2x3y4�2�12 + 40p2x2y3�2�13
+ 30p2xy2�2�1
4 � �(p2xy + �1)4
2p2x+ �2 + y�3 � 2p2x2y3��3 � 6p2xy2��1�3 + �4 + y�5; (4.34)
and
57

u3 = �(H � y)(�2 +Hp3xy)
2H+ 2p3x
5y6�2 + 12p3x4y5�2�1 + 30p3x
3y4�2�12 + 40p3x
2y3�2�13+
30p3xy2�2�1
4 � �(p3xy + �1)4
2p3x+ �2 + y�3 � 2p3x2y3��3 � 6p3xy2��1�3 + y�4; (4.35)
where 1; 2; 3; 4; �1; �2; �3; �4; �1; �2; �3; and �4 are the variables terms taken for simplicity
their values are given in Appendix C.
If the third grade �uid parameter � = 0; is put in Eqs. (4.33)-(4.35), the results of Du¤y et
al. [25] are recovered.
The volume �uxes (per unit width) in the three regions are given by using Eqs. (2:22) ; (2:24)
and (2:26) as follow:
Q1 =
�h
2� h3p1x
12� 1
10h5p1x
3� +2
7h7p1x
5�2 � 12h4p1x
2� 1 + 2h6p1x
4�2 1 � h3p1x� 12
+ 6h5p1x3�2 1
2 � h2� 13 + 10h4p1x2�2 13 �h� 1
4
2p1x+ 10h3p1x�
2 14
+h 2 +h2 32
� 12h4p1x
2� 3 � 2h3p1x� 1 3 +h2 42
�; (4.36)
Q2 =1
12(h�H)3p2x �
1
40(h�H)5p2x3� +
3
112(h�H)7p2x5�2; (4.37)
Q3 =H
420p3x
�120H6p3x
6�2 + 840H5p3x5�2�1 � 210��14 � 42H4p3x
4��1� 60��12
�� 210H3p3x
3���1�20��13 + �3
�+ 35H2p3x
2��1 + 120�2�14 � 12��1(�1 + 2�3)
�+210p3x
�1 + 2�2 +H
��2��13 + �3 + �4
���: (4.38)
To �nd the values of pressure gradient in the three regions, the Eqs. (4.36)-(4.37) are
approximated using Maclaurin�s series. Therefore
p1x =6h(h� 2Q1)
h4 � 6h2� + 36�2; (4.39)
58

p2x =12Q2
(h�H)3 ; (4.40)
p3x =6�H2 � 2HQ3
�H4 � 6H2� � 72�2
: (4.41)
It is observed that p3x is constant, whereas p1x and p2xvaries with x.
The stream function 1; 2; and 3 satisfying Eqs.(2:34� 2:35) are, therefore
1 =1
420hp1x
�420hp1xy � 210p1xy2 � 105h2p1x2y2 + 70hp1x2y3 � 42hp1x4y5�+
120hp1x6y7�2 � 210hp1x3y4� 1 + 840hp1x5y6�2 1 � 420hp1x2y3� 12 + 2520hp1x4y5�2 12
�420hp1xy2� 13 + 4200hp1x3y4�2 13 � 210hy� 14 + 4200hp1x2y3�2 14 + 420hp1xy 2+
210hp1xy2 3 � 210hp1x3y4� 3 � 840hp1x2y3� 1 3 + 210hp1xy2 4
�; (4.42)
2 =1
420p2x
��120h7p2x6�2 + 120p2x6y7�2 � 840h6p2x5�2�1 + 840p2x5y6�2�1 � 210y��14
+ 42h5p2x4��1� 60��12
�+ 42p2x
4y5���1 + 60��12
�+ 210p2x
3y4����1 + 20��13 � �3
�+
210h4p2x3���1 � 20��13 + �3
�+ 35h3p2x
2�1 + 12��1
��1 � 10��13 + 2�3
��+
35p2x2y2��3H + 2y
�1 + 60�2�1
4 � 6��1(�1 + 2�3)��+ 105h
�2��1
4 + p2x(p2x(2H � y)y
�4(�2 + �4)))� 105h2p2x�Hp2x + 2
��2��13 + �3 + �5
��++210p2x�
2Q1 + y�2(�2 + �4) + y
��2��13 + �3 + �5
����; (4.43)
3 =1
420Hp3x��420Hp3xy � 210p3xy2 � 105H2p3x
2y2 + 70Hp3x2y3 � 42Hp3x4y5�
+120Hp3x6y7�2 � 210Hp3x3y4��1 + 840Hp3x5y6�2�1 � 420Hp3x2y3��12 + 2520Hp3x4y5�2�12
�420Hp3xy2��13 + 4200Hp3x3y4�2�13 � 210Hy��14 + 4200Hp3x2y3�2�14 + 420Hp3xy�2
+210Hp3xy2�3 � 210Hp3x3y4��3 � 840Hp3x2y3��1�3 + 210Hp3xy2�4
�: (4.44)
59

If � = 0; is put then from Eqs. (4:42)� (4:44); the results of Du¤y et al. [25] are obtained.
By global mass conservation,
Q1 +Q2 = Q3 (4.45)
which is consistent with the fact that the wall y = H consists of the streamline 2 = Q1 +Q2
in 0 6 x < 1 and the streamline 3 = Q3 in 1 6 x 6 1 + l:
From Eq. (4.3), the pressure in each region is independent of y. Suppose that pressure is
continuous at the ends of the blades, then Eqs. (2:40)� (2:41) yield
p1 =6h4h1
3 � 6h3h14 � 6h4h12Q1 + 6h2h14Q1 + 6��2h4h1 � 2hh14 � 3h4Q1 + 3h14Q1
�h4h1
4�+ pL;
(4.46)
p2 =6�Q2�
[1
(H � h1)2� 1
(H � h)2] + pL; (4.47)
p3 =6(H2 � 2HQ3)
�(H4 � 6H2� � 72�2)(x� 1) + pL: (4.48)
Setting x = 0 in Eqs. (4:46) � (4:47) and x = 1 + l in Eq. (4:48) ; and using Eq. (2:41) ;
three representations of p0 � pL are as follow:
p0 � pL =1
h04h1
4�
�6h0
4h13 � 6h03h14 � 6h04h12Q1 + 6h02h14Q1+
12h04h1� � 12h0h14� � 18h04Q1� + 18h14Q1�
�; (4.49)
p0 � pL = 6Q2[1
(H � h1)2� 1
(H � h0)2]; (4.50)
p0 � pL =6(H2 � 2HQ3)
�(H4 � 6H2� � 72�2)l: (4.51)
60

The moment of forces on the blades about the pivot due to the pressure is of the form
M1 = M1k. The Eq. (2:48), reduces to the equation for blades in equilibrium by assuming
M1 = 0: Therefore
(1�H) (h0 � h1)Q2(H � h0)(H � h1)
+Q1�(h
30 � h31)
h30h31
� (2 + 3Q1)�(h20 � h21)
2h20h21
+(Q1 + 2�)(h0 � h1)
h0h1+
(h20 � h21)2h20h
21(H � h1)2h14
�H2�h13 � h12Q1 + 2h1� � 3Q1�
�� 2Hh1
�h13 � h12Q1 + 2h1� � 3Q1�
��+h1
2�h13 � h12(Q1 +Q2) + 2h1� � 3Q1�
��+ (1 +Q1)Log[
h1h0] +Q2Log[
h1 �Hh0 �H
]+
=(h0 � h1)
(H � h1)2h14�H2�h13 + h1
4 � h12Q1 + 2h1� � 3Q1��� 2Hh1
�h13 + h1
4 � h12Q1
+2h1� � 3Q1�) + h12�h13 + h1
4 � h12(Q1 +Q2) + 2h1� � 3Q1���: (4.52)
4.3 Forces on the Blade and the Walls
The drag and lift forces Fx; Fy respectively acting per unit width on the blades due to the �uid
in the x- and y-directions using Eqs. (2:53) and (2:54) are given by
61

Fx =
(h0 � h1)f
6Q1h0h1
� 6Q2(H � h1)2
�6�H2 � 2Hh1 + h12
�Q2
(H � h0)(H � h1)3� 6Q1h0h1�
+
6Q2(H � h0)(H � h1)�
+9(h0 + h1)�
h20h21
+6�(h0 + h1)
h20h21�
� (h20 + h0h1 + h
21)
h30h31
(60Q1�
�6Q1��
) +6�h13 � h12Q1 + 2h1� � 3Q1�
�h14�
g � 432Q23�((H � h0)5 � (H � h1)5)5(H � h0)5(H � h1)5�3
+
10368Q25�2((H � h0)9 � (H � h1)9)(H � h0)9(H � h1)9�5
� 100776960Q14�7(h180 � h181 )
h180 h181
+
725594112Q15�7(h190 � h191 )
19h190 h191
+18�7Q1
2� � 15�2�(h40 � h41)
h40h41
�432
�Q1
3� � 28Q1�2�(h50 � h51)
5h50h51
�
36�266Q1
2�2 + 207�3�(h60 � h61)
h60h61
+6480
�22Q1
3�2 + 73Q1�3�(h70 � h71)
7h70h71
� 162
h80h81
�140Q1
4�2+
1618Q12�3 + 459�4
�(h80 � h81) +
864�12Q1
5�2 + 622Q13�3 + 825Q1�
4�(h90 � h91)
h90h91
�7776
�370Q1
4�3
5h100 h101
+1821Q12�4 + 261�5
�(h100 � h101 ) +
93312�30Q1
5�3 + 683Q13�4 + 471Q1�
5�(h110 � h111 )
11h110 h111
�
11664�520Q1
4�4
h120 h121
+ 1368Q12�5 + 105�6
!(h120 � h121 ) +
279936�4
13h130 h131
�
�120Q1
5 + 1496Q13� + 555Q1�
2�(h130 � h131 ) +
139968�1640Q1
4�5 + 2340Q12�6 + 81�7
�(h140 � h141 )
7h140 h141
+559872
�24Q1
5�5 + 164Q13�6 + 27Q1�
7�(h150 � h151 )
h150 h151
�2099520
�43Q1
4�6 + 27Q12�7�
h160 h161
(h160 � h161 ) +604661760
�Q1
5�6 + 3Q13�7�(h170 � h171 )
17h170 h171
+ (2� 6�)Log[
h1h0]
!; (4.53)
and
Fy =6
�2
"(h1 � h0)
(Q2
(H � h1)2��H2 � 2Hh1 + h12
�Q2
(H � h0)(H � h1)3� Q1�h0h1
+�(h0 + h1)
h20h21�
�
Q1�
h30h31�(h20 + h0h1 + h
21)�
�h13 � h12Q1 + 2h1� � 3Q1�
�h14�
)� Logh1
h0
#: (4.54)
The force (per unit width) due to the �uid in the x- direction on the portion 0 � x � 1 of
the lower wall y = 0 can be found using Eq. (2:57). Therefore,
62

F0 =1
�
"2
�3Q1(h0 � h1)
h0h1� 45�(h
20 � h21)
2h20h21
+78Q1�(h
30 � h31)
h30h31
+216Q1
�Q1
2 � 152���
5h50h51
(h50 � h51) +50388480Q1
4�7(h180 � h181 )h180 h
181
� 362797056Q15�7(h190 � h191 )
19h190 h191
� 302330880Q117h170 h
171
3�6�Q1
2 + 3��(h170 � h171 ) +
1049760Q12�6
�47Q1
2 + 27��(h160 � h161 )
h160 h161
� 9720Q1�2
7h70h71�
18Q12 + 91�
�(h70 � h71) +
126�2�142Q1
2 + 141��(h60 � h61)
h60h61
� 279936Q1�5
h150 h151�
24Q14 + 196Q1
2� + 27�2�(h150 h
151 ) +
69984�5�1960Q1
4 + 3060Q12� + 81�2
�(h140 � h141 )
7h140 h141
+
5832�4�680Q1
4 + 2328Q12� + 165�2
�(h120 � h121 )
h120 h121
� 419904Q1�4
13h130 h131�
40Q14 + 712Q1
2� + 265�2�(h130 � h131 ) +
3888�3�530Q1
4 + 3993Q12� + 621�2
�(h100 � h101 )
5h100 h101
�46656Q1�
3�30Q1
4 + 1163Q12� + 951�2
�(h110 � h111 )
11h110 h111
+�99Q12� + 999�2
h40h41
(h40 � h41)+
81�2�220Q1
4 + 4538Q12� + 1575�2
�(h80 � h81)
h80h81
�432Q1�
2�12Q1
4 + 1262Q12� + 2289�2
�(h90 � h91)
h90h91
432Q1�2�12Q1
4 + 1262Q12� + 2289�2
�(h90 � h91)
h90h91
� logh21
h20
!+ l
�1
H+Hp32
+ 2��13 � �3� �4
�#:
(4.55)
The force (per unit width) due to the �uid in the x- direction on the portion 0 � x � L of
the upper wall y = H using Eq. (2:59) is
FH =3Q22�
�4(h1 � h0)
(H � h0)(H � h1)+288Q2
2�((H � h0)5 � (H � h1)5)5(H � h0)5(H � h1)5�2
� 6912Q24�2
(H � h0)9(H � h1)9�4
((H � h0)9(H � h1)9)����2 +H2p3x
2H+ 12H5p3x
5�2 + 60H4p3x4�2�1
+120H3p3x3�2�1
2 + 120H2p3x2�2�1
3 + 60Hp3x�2�1
4 � 2�(Hp3x + �1)3
+�3� 6H2p3x2��3� 12Hp3x��1�3 + �4
�l: (4.56)
63

4.4 Graphs and Discussion
The steady isothermal incompressible �ow of a third grade �uid in a scraped surface heat
exchanger is studied. The gap between blades and walls of the scraped surface heat exchanger
is assumed to be narrow. Figure 4.1 shows the e¤ect of non- Newtonian �ow parameter � on
the velocities in region 1-3. It is observed that velocities in region 1 and region 3 (Figure 4.1(a)
& 4.1 (c)) increase with an increase in the value of parameter � which depicts shear thinning
behaviour; whereas in region 2 (Figure 4.1(b)) velocity pro�le remains constant due to very
weak �ow in this region in comparison to the other regions of SSHE. Figure 4.2 shows e¤ect of
pressure gradient on the velocity pro�les. It is seen that velocity pro�les in all the three stations
increase with the increase in the value of favourable pressure gradient. In Figure 4.1 and Figure
4.2, parabolic velocity pro�les are obtained in di¤erent station inside SSHE which are in broad
agreement with the experimental results obtained by MRI on an �idealized�SSHE geometry
[1]. Figure 4.3 and Figure 4.4 show the stream line pattern inside SSHE which indicate velocity
distribution. Figure 4.5 shows plot of �ow rate for di¤erent values of l. It is observed that
volume �ow rate pro�les are symmetric about xp = 12 : Figure 4.6 shows plot of p1 � pL and
p2 � pL as a function of x.
64

Figure 4.1: E¤ect of Non-Newtonian parameter � on velocity pro�les by �xing H = 1:7; l = 2;xp = 0:49; � = 1:25322; x = 1; p1x = p2x = p3x = �1:
4.5 Conclusion
In this Chapter steady incompressible �ow of a third grade �uid in scraped surface heat ex-
changers is analyzed. The gaps between the blades and the device walls are assumed to be
narrow so that lubrication approximation theory for the �ow is applicable. The solutions for
a third grade �uid model around a periodic array of pivoted scraper blade in channel with
one moving wall and other stationary in the presence of pressure gradient applied in direction
transverse to the wall motion using Adomian decomposition method are obtained. Velocity
pro�les for di¤erent regions inside SSHE, �ow rates, stream functions, forces on the wall and on
the blade are presented. To visualize the e¤ects of various parameters on velocity pro�le and
di¤erent �ow parameters, various graphs are sketched. Under identical physical conditions, the
results of Du¤y et al. [25] are recovered. Work presented in this chapter will provide quanti-
65

Figure 4.2: E¤ect of pressure gradient on the veloity pro�le by taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; x = 1; � = 0:1:
tative understanding of some basic features of the �uid �ow within a SSHE and will provide a
basis for subsequent studies of more complicated physical e¤ects.
66

Figure 4.3: Srteam lines patrens in di¤erent regions of SSHE by taking H = 1:7; l = 2;xp = 0:49; � = 1:25322; � = 0:05:
Figure 4.4: Stream lines patrens in di¤erent regions of SSHE, with H = 3; l = 0:5; xp = 0:595;� = �1:48967; � = 0:05:
67

Figure 4.5: Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 0:2, forl = 0; 0:1; 0:25; 0:5; 1; 2; 4; 10:
68

Figure 4.6: Plot of pressures p1 � pL and p2 � pL as a function of x with H = 1:7; l = 2;xp = 0:49; � = 0:5; � = 0:2:
69

Chapter 5
Flow of a Sisko Fluid in a Scraped Surface Heat
Exchanger
Flow of a Sisko �uid in a scraped surface heat exchanger is studied. Solution for steady isother-
mal �ow of a Sisko �uid model around a periodic array of pivoted scraper blade in channel with
one moving and other stationary wall, when there is an applied pressure gradient in transverse
direction to the wall motion using Adomian decomposition method is found. Expressions for
velocity pro�les for di¤erent regions, �ow rates, stream function, forces on the wall and on the
blades are obtained and their variation with respect to di¤erent non-dimensional parameters
are visualized graphically.
5.1 Problem Formulation
Consider a steady isothermal incompressible �ow of a Sisko �uid in channel of width H having
a periodic array of inclined smoothly pivoted thin plane blades. The �ow is due to motion of
the wall at y = 0 moving with speed U , the wall at y = H is �xed.
The constitutive equations of motion for a Sisko �uid [35] are
�dV
dt= divS+ �b; (5.1)
70

where
S =
24a+ b �����r1
2trA21
�����n�135A1; (5.2)
and A1 is de�ned in Eq. (2:6), a; b are material constants and n is the �uid behaviour index.
If a = 0; the constitutive equation for the power law �uid model and if b = 0 (or n = 1) for
Newtonian �uid are obtained.
Using the velocity �eld de�ned in Eq. (2:7) and lubrication approximations theory Eq. (5:2)
becomes
Sxx = 0; (5.3)
Sxy =
"a+ b
����@uk@y����n�1
#�@uk@y
�; (5.4)
Syy = 0: (5.5)
The momentum equation (5:1) using Velocity �eld de�ned in Eq. (2:7) and lubrication
approximations theory yields
a@2uk@y2
+ b@
@y
�@uk@y
�n=@pk@x
; k = 1; 2; 3; (5.6)
@pk@y
= 0; k = 1; 2; 3: (5.7)
Eq. (5.7) implies that pk 6= pk(y); therefore, Eq. (5.6) can be written as,
a@2uk@y2
+ b@
@y
�@uk@y
�n=dpkdx
; k = 1; 2; 3: (5.8)
Using dimensionless parameters de�ned in Eq. (2:14) and setting
� = �a
�hpU
�n Uhp;
then Eq. (5.8) after ignoring bar sign for convenience in dimensionless form becomes
71

@2uk@y2
+ �@
@y(@uk@y)n =
dpkdx
: (5.9)
5.2 Solution of the Problem
The Eq. (5.9) is highly nonlinear di¤erential equation, therefore its analytical solution is not
possible. Adomian decomposition method [46] is employed to solve Eq.(5.9) subject to boundary
conditions (2:16)-(2:18). Re-writing the Eq. (5.9) in the form
Lyy(uk) =dpkdx
� � @@y(@uk@y)n; (5.10)
where Lyy = @2
@y2is di¤erential operator and is assumed to be invertible so that
L�1yy =
Z Z(�)@y@y:
Applying L�1yy on both sides of Eq. (5:10) to obtain
uk = L�1yydpkdx
+ c1 + c2y � �L�1yy�@
@y(@uk@y)n�; k = 1; 2; 3: (5.11)
where c1 and c2 are arbitrary function of integration and can be determined using boundary
conditions. According to the procedure of ADM, uk can be written in component form as
uk =1Xm=0
ukm; k = 1; 2; 3: (5.12)
Thus, Eq. (5.11) takes the form,
1Xm=0
ukm = c1 + c2y � �L�1yy
@
@y
@
@y
1Xm=0
ukm
!n!+ L�1yy
dpkdx
: (5.13)
Adomian also suggested that the nonlinear terms can be explored in the form of Adomian
polynomial, say Am given by,
Am =
@
@y
@
@y
1Xn=0
ukm
!n!; k = 1; 2; 3: (5.14)
72

Thus, Eq. (5.13) takes the form
1Xm=0
ukm = L�1yydpkdx
+ c1 + c2y � �L�1yy (Am) ; k = 1; 2; 3: (5.15)
and the boundary conditions become
1Pm=0
u1m = 1 at y = 0;1Pm=0
u1m = 0; at y = h;
1Pm=0
u2m = 0 at y = h;1Pm=0
u2m = 0 at y = H;
in 0 � x � 1; and1Pm=0
u3m = 1 at y = 0;1Pm=0
u3m = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>>>>=>>>>>>>>>>>>;(5.16)
From recursive relation (5.15) and boundary conditions (5.16), the zeroth order problem is
uk0 = c1 + c2y + L�1yy
dpkdx
; k = 1; 2; 3; (5.17)
with boundary conditions
u10 = 1 at y = 0; u10 = 0; at y = h;
u20 = 0 at y = h; u20 = 0 at y = H;
in 0 � x � 1; and
u30 = 1 at y = 0; u30 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(5.18)
The remaining order problems are of the form
ukm = ��L�1yy (Am) ; m � 1; (5.19)
with boundary conditions
73

1Pm=1
u1m = 0 at y = 0;1Pm=1
u1m = 0; at y = h;
1Pm=1
u2m = 0 at y = h;1Pm=1
u2m = 0 at y = H;
in 0 � x � 1; and1Pm=1
u3m = 0 at y = 0;1Pm=1
u3m = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>>>>=>>>>>>>>>>>>;(5.20)
5.2.1 Zeroth Order Solutions
The Eq. (5.19) together with the boundary condition (5.20) gives the zeroth order solutions as
u10 = �(h� y)(�2 + hp1xy)
2h; (5.21)
u20 =1
2p2x(h� y)(H � y); (5.22)
u30 = �(H � y)(�2 +Hp3xy)
2H: (5.23)
5.2.2 First Order Solutions
For m = 1; Eqs. (5.19)-(5.20) yield
uk1 = ��L�1yy (A0) ; k = 1; 2; 3; (5.24)
where
A0 =@
@y
�@uk0@y
�n; (5.25)
u11 = 0 at y = 0; u11 = 0; at y = h;
u21 = 0 at y = h; u21 = 0 at y = H;
in 0 � x � 1; and
u31 = 0 at y = 0; u31 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(5.26)
74

Thus, using the zeroth order solutions (5:21)� (5:23) in Eq. (5.24) along with the boundary
conditions (5.26) yields
u11 =(�p1xy + 1)1+n�
p1x + np1x+ 2 + y 3; (5.27)
u21 =(�p2xy + �1)1+n�
p2x + np2x+ �2 + y�3; (5.28)
u31 =�(�p3xy + �1)1+n
p3x + np3x+ �2 + y�3: (5.29)
5.2.3 Second Order Solutions
For m = 2; Eqs. (5.19)-(5.20) yield
uk2 = ��L�1yy (A1) ; k = 1; 2; 3; (5.30)
where
A1 = m@
@y
�@uk0@y
�m�1 @uk1@y
!; k = 1; 2; 3; (5.31)
u12 = 0 at y = 0; u12 = 0; at y = h;
u22 = 0 at y = h; u22 = 0 at y = H;
in 0 � x � 1; and
u32 = 0 at y = 0; u32 = 0 at y = H;
in 1 � x � 1 + l:
9>>>>>>>>>=>>>>>>>>>;(5.32)
In view of the zeroth order solution Eqs. (5:21) � (5:23) and �rst order solutions (5.27)-
(5:29) ; the second order solutions with the boundary conditions (5.32) yields
u12 = �(�p1xy + 1)n� (�2 3 + (�p1xy + 1)n�)
2p1x+ 4 + y 5; (5.33)
u22 = �(�p2xy + �1)n� (�2�3 + (�p2xy + �1)n�)
2p2x+ �4 + y�5; (5.34)
75

u32 = ��(�p3xy + �1)n (�(�p3xy + �1)n � 2�3)
2p3x+�3 + y�4: (5.35)
5.2.4 Velocity Pro�le
Using zeroth, �rst and second order solutions in Eq. (5.12) the following results are obtained:
u1 = �(h� y)(�2 + hp1xy)2h
+(�p1xy + 1)1+n�
p1x + np1x� (�p1xy + 1)
n� (�2 3 + (�p1xy + 1)n�)2p1x
+ 2 + y( 3 + 5) + 4; (5.36)
u2 =1
2p2x(h� y)(H � y) + (�p2xy + �1)
1+n�
p2x + np2x� (�p2xy + �1)
n� (�2�3 + (�p2xy + �1)n�)2p2x
+�2 + y�3 + �4 + y�5; (5.37)
u3 = �(H � y)(�2 +Hp3xy)2H
+�(�p3xy + �1)1+n
p3x + np3x� �(�p3xy + �1)n (�(�p3xy + �1)n � 2�3)
2p3x
+�2 + y�3+�3 + y�4: (5.38)
If the Sisko �uid parameter � = 0 is put in Eqs. (5.36)-(5.38) the results of Du¤y et al. [25]
are recovered.
The volume �uxes (per unit width) in the three regions using Eqs. (2:22) ; (2:24) and (2:26)
are given by
Q1 =
�h
2� h3p1x
12+ h 2 +
h2 32
+ h 4 +h2 52
� (�hp1x + 1)2+n�(2 + 3n+ n2) p1x2
� (�hp1x + 1)1+n 3�
(1 + n)p1x2
+(�hp1x + 1)1+2n�22p1x2 + 4np1x2
+ 11+n�
�2( 1+(2+n) 3)(1+n)(2+n) � 1
n�1+2n
�2p1x2
1A ; (5.39)
76

Q2 =1
12
�h3p2 � 3h2Hp2 + 3hH2p2 �H3p2 � 12h�2 + 12H�2 � 6h2�3 + 6H2�3 � 12h�4+
12H�4 � 6h2�5 + 6H2�5 +12(hp2 + �1)
2+n�
(2 + 3n+ n2) p22� 12(Hp2 + �1)
2+n�
(2 + 3n+ n2) p22+
12(hp2 + �1)1+n�3�
(1 + n)p22� 12(Hp2 + �1)
1+n�3�
(1 + n)p22� 6(hp2 + �1)
1+2n�2
(1 + 2n)p22+6(Hp2 + �1)
1+2n�2
(1 + 2n)p22
�;
(5.40)
and
Q3 =H
2� H3p3x
12� �(�Hp3x + �1)2+n(2 + 3n+ n2) p3x2
+�2(�Hp3x + �1)1+2n2p3x2 + 4np3x2
+H�2 +H2�32
�
�(�Hp3x + �1)1+n�3(1 + n)p3x2
���1
1+n��2(1 + 2n)�1 +
�2 + 3n+ n2
���1
n � 2�2 + 5n+ 2n2
��3�
2 (2 + 7n+ 7n2 + 2n3) p3x2
+H�4 +H2�52
: (5.41)
To �nd the values of pressure gradient in the three regions, the Eqs. (5.39), (5.40) and
(5.41), are approximated using Maclaurin�s series. Therefore
p1x = �6(h� 2Q1)
h3��1�
�1h
��1+nn�+
�1h
��2+2nn2�2
� ; (5.42)
p2x =12Q2
(h�H)3 ; (5.43)
p3x =6(H � 2Q3)
H3��1 +
�1H
�nHn�+
�1H
�2nH2n2�2
� : (5.44)
We observe that p3x is constant, whereas p1x and p2xvaries with x.
The stream functions 1; 2; and 3 satisfying the relations de�ned in Eqs. (2:34)� (2:35)
are
77

1 =y [�6y + h(12(1 + 2 + 4) + y(�3hp1x + 2p1xy + 6( 3 + 5)))]
12h�
(�p1xy + 1)1+n(�p1xy + 1 + (2 + n) 3)�(1 + n)(2 + n)p1x2
+(�p1xy + 1)1+2n�22p1x2 + 4np1x2
+ 6; (5.45)
2 =1
12(y(h(6Hp2 � 3p2y) + 12(�2 + �4) + y(�3Hp2 + 2p2y + 6(�3 + �5)))
�12(�p2y + �1)1+n(�p2y + �1 + (2 + n)�3)�(1 + n)(2 + n)p22
+6(�p2y + �1)1+2n�2
(1 + 2n)p22+ 12�6
�; (5.46)
3 =1
2H(1 + n)p3x
��(1 + n)p3xy2 �
1
2H2(1 + n)p3x
2y2 +1
3H(1 + n)p3x
2y3+
H(1 + n)�2(�p3xy + �1)1+2n�2p3x + 2np3x
� 2H�(�p3xy + �1)1+n(�p3xy�2 + �1�2 + (2 + n)�3)(2 + n)p3x
+2H(1 + n)p3xy(1 + �4) +H(1 + n)p3xy2(�3 + �5)
�+ �6: (5.47)
If � = 0; then from Eqs. (5:45)� (5:47); the results of Du¤y et al. [25] are recovered.
The Eq. (5.7) shows that the pressure in each region is independent of y. Suppose that
pressure is continuous at the ends of the blades as de�ned in Eqs.(2:40)� (2:41) ; then
p1 =6h1
2Q1 � 6hh12(1 + 2nQ1�) + h2(�6Q1 + h1(6 + 12nQ1�))� 6h2h12n�(Log[ hh1 ])h2h1
2�+ pL;
(5.48)
p2 =6�Q2�
[1
(H � h1)2� 1
(H � h)2] + pL; (5.49)
p3 =�6(H � 2Q3)(�1 + x)
H3��1 +
�1H
��1+nn���1 +
�1H
��1+nn��� + pL: (5.50)
78

Setting x = 0 in Eqs. (5:48)� (5:49) ; x = 1+ l in Eq. (5:50) ; and using Eq. (2:41) ; then three
representations of p0 � pL are given by
p0 � pL =1
h02h1
2�
�6h0
2h1 � 6h0h12 � 6h02Q1 + 6h12Q1 + 12h02h1nQ1�� ;
12h0h12nQ1�+ 6h0
2h12n�Log[
h1h0] (5.51)
p0 � pL = 6Q2�
1
(H � h1)2� 1
(H � h0)2
�; (5.52)
p0 � pL =�6(H � 2Q3)
H3��1 +
�1H
��1+nn���1 +
�1H
��1+nn��� l: (5.53)
The moment of forces on the blades about the pivot due to the pressure is of the form
M1 =M1k. Eq. (2:48) reduces to the equation for blades in equilibrium by assuming M1 = 0:
Thus
�(h0 � h1)
�h0h1
2�22h1(Q1 +Q2�)� h02(h1 �Q1 �Q2�) + h0(2(Q1 +Q2�)+
(H � h0)h0(H � h1)h1�
h1(�2� 3h1 +Q1 +Q2�))) �h0h1n(h1(4 + h0 + h1) + 4(2 + h0 + 3h1)Q1)�) +H3(2h0h1
+H3(2h0h1(2 + h0 + 3h1)� 2(2 + h0)(h0 + h1)Q1 + h0h1n(h1(4 + h0 + h1)
+4(2 + h0 + 3h1)Q1)�) +Hh1(2(2h0 + h1)(h0h1(2 + h0 + 3h1)� (2 + h0)(h0 + h1)Q1)
�h0h1(2 + h0 + 3h1) + (2 + h0)(h0 + h1)Q1) + 4h0h12Q2� � h0h1(h0 + 2h1)n(h1(4 + h0 + h1)
+4(2 + h0 + 3h1)Q1)�) + 2(H � h0)h0(H � h1)2h12 ((2 + (�2 + h0)h0n�+Q1(2 + 4n�))logh0+��2(1 +Q1) + n
�h0(2 + h0)� 2
�h12 + 2Q1
����log[h1] + 2Q2�(log
�H + h0�H + h1
)
�= 0: (5.54)
5.3 Forces on the Blade and the Walls
The drag and lift forces Fx; Fy respectively acting per unit width on the blades due to the �uid
in the x� and y�directions using Eqs. (2:53)� (2:54) are given by
79

Fx =1
�
��6 + 6h0
h1� 6h0Q1
h12 +
6Q1h1
+6Q2
H � h0+6h0Q2H2
+6h0
2Q2H3
� 6h0Q2(H � h1)2
�
6h1Q2H2
+6h1Q2
(H � h1)2� 6h1
2Q2H3
+6Q2
h1 �H+(h1 � h0)n
�h1(h0 + h1)� 12h1Q1 � 144Q12
��
12h1Q1
�2(2 + 3n(h0 +Q1)�)logh0 +1
24Q148Q1(2 + 3n(h0 +Q1)�)logh1 + (h0 � h1)n��
�(h0 + h1 � 12Q1)log�Q1 + (h0 + h1 � 12Q1)logQ1 + 12Q1��log� Q2
H2+ log
Q2H2
���;
(5.55)
Fy =6
�2
�1 +
Q1h0� 2Q1
h1+
�1
�H + h0+
1
H � h1
�Q2 �
h1Q2(H � h1)2
+ h1n�+ 2nQ1�++
h0
�Q2
(H � h1)2� n�+ Q1 � h1(1 + 2nQ1�)
h12
�� (1 + n(h0 + 2Q1)�)Log[
h1h0]
�: (5.56)
The force (per unit width) in the x-direction on the portion 0 � x � 1 of the lower wall
y = 0 due to the �uid can be given by using Eq. (2:57) : Therefore
F0 =1
�24h0h1Q1
�2(�h0 + h1)
�72Q1
2 + h0h1n(h0 + h1 + 24Q1)��+ h0h1(48Q1(2 + 3nQ1�)Logh0
�48Q1(2 + 3nQ1�)logh1 + (h0 � h1)n(h0 + h1 + 12Q1)�(log[�Q1]� log[Q1]))]
+l
��2(2H � 3Q3)
H2+
n
3H(H � 2Q3)
�6H2�� 30HQ3�+ 36Q23��H2�Log
�4
H� 6Q3H2
�+3HQ3�log
�4
H� 6Q3H2
�+H2�log
�� 2H+6Q3H2
�� 3HQ3�log
�� 2H+6Q3H2
���: (5.57)
The force (per unit width) in the x-direction on the portion 0 � x � L of the upper wall
y = H due to the �uid can be given by using in Eq. (2:59) : Thus
80

FH =1
�
24�(h0 � h1)�12(H + h0 + h1)Q2 + 2H
3n�+H3n���Log
h�Q2H2
i+ Log
hQ2H2
i��2H3
35+
0@4H � 6Q3H2
�(H � 3Q3)�
�6(H � 2Q3) +HLog
h�H�3Q3
H2
i�HLog
h2H�3Q3H2
i�n
3H(H � 2Q3)
1A l:
(5.58)
5.4 Graphs and Discussion
The steady isothermal incompressible �ow of a Sisko �uid in a scraped surface heat exchanger
is studied. Tables 5.1, 5.2 and 5.3 show velocity distribution of Sisko �uid in di¤erent station
of SSHE for �uid behaviour index n, Sisko �uid parameter �. From Tables 5.1 and 5.3, it is
observed that velocity decreases as one moves towards the upper part of the channel, while
Table 5.2 shows increase in the velocity. Table 5.4 shows �ow rate distribution as function of
�ow behaviour index n: It is observed that value of �ow rate increases in three regions with the
an increase in value of n.
Figure 5.1 shows the e¤ect of �uid behaviour index n on velocity in the three regions. It is
observed that velocities in region 1, region 2 and region 3 decrease with increase in the values of
Sisko �uid parameter � which re�ect shear thickening aspect of �uid. Figure 5.2 shows the e¤ect
of increasing the value of Sisko �uid parameter � for n = 2. It is observed that velocities in region
1, region 2 and region 3 increase with the increase in the value of Sisko �uid parameter � which
depicts shear thinning behaviour. Figure 5.3 shows e¤ect of pressure gradient on the velocity
pro�les. It is seen that velocity pro�les in all the three stations increase with the increase in
the value of favourable pressure gradient. In Figure 5.3 parabolic velocity pro�les are obtained
in di¤erent station inside SSHE which are in broad agreement with the experimental results
obtained by MRI on an �idealized� SSHE geometry [1]. Figure 5.4 and Figure 5.5 show the
stream line pattern inside SSHE indicating velocity distribution. Figure 5.6 shows plot of �ow
rate with increase in the values of l. It is observed that volume �ow rates are symmetric about
xp =12 , this behaviour is same as studied by Du¤y et al. [25]: Figure 5.7 shows plot of p1 � pL
and p2 � pL as a function of x.
81

Fixing H = 1:4; l = 1; xp = 0:49; � = 0:4.Shear Thinning �uid Shear Thickening �uid Newtonian Fluid,
y n = 0:5; � = 0:2 n = 1:5; � = 0:2 � = 0
0:0 1:000000 1:000000 1:0000000:1 0:892139 0:894235 0:8922270:2 0:788749 0:792594 0:7889320:3 0:689836 0:695073 0:6901140:4 0:595407 0:601672 0:5957740:5 0:505467 0:512386 0:5059120:6 0:420024 0:427213 0:4205270:7 0:339086 0:34615 0:3396200:8 0:262659 0:269192 0:2631900:9 0:190752 0:196337 0:1912381:0 0:123373 0:127579 0:1237641:1 0:060531 0:0629143 0:0607671:2 0:002237 0:002338 0:002247
Table 5.1: Velocity distribution in region 1 of SSHE for Sisko �uid
Fixing H = 1:4; l = 1; xp = 0:49; � = 0:4.Shear Thinning �uid Shear Thickening �uid Newtonian Fluid,
y n = 0:5; � = 0:2 n = 1:5; � = 0:2 � = 0
1:204 0:000000 0:000000 0:0000001:304 0:015477 0:015476 0:0154767
Table 5.2: Velocity distribution in region 2 of SSHE for Sisko �uid
Fixing H = 1:4; l = 1; xp = 0:49; � = 0:4.Shear Thinning �uid Shear Thickening �uid Newtonian Fluid,
y n = 0:5; � = 0:2 n = 1:5; � = 0:2 � = 00:0 1:000000 1:000000 1:0000000:1 0:882816 0:884057 0:8827770:2 0:772599 0:775002 0:77260:3 0:669363 0:672829 0:6694680:4 0:573125 0:577531 0:5733810:5 0:483899 0:489100 0:4843390:6 0:401704 0:407524 0:4023420:7 0:326561 0:332793 0:3273910:8 0:258489 0:264894 0:2594850:9 0:197512 0:203812 0:1986251:0 0:143656 0:149531 0:1448091:1 0:096947 0:102031 0:0980391:2 0:057414 0:061293 0:0583141:3 0:025089 0:027291 0:0256341:4 0:000000 0:000000 0:000000
Table 5.3: Velocity distribution in region 3 of SSHE for Sisko �uid
82

Fixing H = 1:4; l = 1; xp = 0:49; � = 0:4; � = 0:2.n Q1 Q2 Q30:0 0:536875 0:002023 0:5388990:2 0:536331 0:001935 0:5382660:4 0:536329 0:001867 0:5381960:6 0:536745 0:001813 0:5385580:8 0:5375 0:001768 0:5392681:0 0:538543 0:001729 0:5402721:2 0:539843 0:001695 0:5415381:4 0:541382 0:001663 0:5430461:6 0:543155 0:001633 0:5447891:8 0:545163 0:00160 0:546767
Table 5.4: Flow distribution inside SSHE.
5.5 Conclusion
In this Chapter steady incompressible �ow of a Sisko �uid in scraped surface heat exchanger
is studied. The solutions for a Sisko �uid model around a periodic array of pivoted scraper
blades in channel with one moving wall and other stationary, when there is an applied pressure
gradient in direction to the wall motion using Adomian decomposition method are presented.
Expressions for velocity pro�les for di¤erent regions inside SSHE, �ow rates, stream functions,
forces on the wall and on the blade are obtained. Graphs for velocity pro�le and for di¤erent
�ow parameter involved are sketched. The result by Du¤y et al. [25] under identical conditions
are recovered. Work presented in this chapter will provide quantitative understanding of some
basic features of the Non- Newtonian �uid �ow within a SSHE and will provide a basis for
subsequent studies of more complicated physical e¤ects.
83

Figure 5.1: E¤fect of behaviour index on velocity pro�le in three regions by taking H = 1:4;l = 1; xp = 0:49; � = 0:4; � = 0:2, x = 1; n = 0:1; 0:6; 0:9; 1:3; 1:9, p1x = p2x = p3x = �1:
84

Figure 5.2: E¤ect of favourable pressure gradient on velocity pro�les in three regions by takingH = 1:7; l = 1; xp = 0:49; � = 0:5; � = 0:4; x = 1; n = 1, p1x = p2x = p3x = �1:
85

Figure 5.3: E¤ect of Sisko �uid parameters on velocity pro�les in three regions by takingH = 1:7; l = 1; xp = 0:49; � = 0:5; x = 1; n = 1; p1x = p2x = p3x = �1:
86

Figure 5.4: Stream line patterens inside SSHE by taking H = 1:7; l = 2; xp = 0:49; � =1:25322; � = 0:4; n = 1:
Figure 5.5: Stream line patterens inside SSHE with H = 3; l = 0:5; xp = 0:595; � =�1:48967; � = 0:2; n = 2:
87

Figure 5.6: Flow rate grpahs by setting H = 3; � = 0:4; n = 1; l = 0; 110 ; 0:25; 0:5; 1; 2; 4; 10:
Figure 5.7: Plots of pressrue at the edge of blade by taking (a) H = 1:7; l = 2; xp = 0:49;� = 1:25322; � = 0:2; n = 2: (b) H = 1:7; l = 2; xp = 0:49; � = 0:432872; � = 0:2; n = 2
88

Chapter 6
Flow of Eyring Fluid in a Scraped Surface Heat
Exchanger
A mathematical model of steady incompressible isothermal �ow of a Eyring �uid in a scraped
surface heat exchanger is investigated. To study �ow inside SSHE, lubrication approximation
theory is employed for the simpli�cation of equations of motion. Flow around a periodic array
of pivoted scraper blade in a channel in which one wall is moving and other is at rest in the
presence of axial pressure in a scraped surface heat exchanger is analyzed. Flow properties,
including the possible presence of regions of reversed �ow under the blades, the forces on the
blades and walls and the �uxes of �uid above and below the blades are evaluated. Graphic
representation for involved �ow parameters is also given.
6.1 Problem Formulation
Consider a steady isothermal incompressible �ow of a Eyring �uid in channel of width H, in
which there is a periodic array of inclined smoothly pivoted thin plane blades. The �ow is due
to motion of the boundary at y = 0 moving with speed U while the boundary at y = H is �xed.
The extra stress tensor S for a Eyring �uid model [37] is de�ned as
S ="
jA1j
�sinh�1(�1
jA1j)
�A1; (6.1)
89

here " and are material constants, A1 is the �rst Rivlin-Ericksen tensor de�ned in Eq. (2:6).
This model shows pseduplastic behaviour at �nite values of stress components. Also, this
model reduces to Newtonian �uid model when � = " :
Equations of motion for Eyring �uid using velocity �eld de�ned in Eq. (2:7) lubrication
approximation become
Sxy = Syx = " sinh�1��1
@uk@y
�; (6.2)
Syz = Szy = 0; (6.3)
@
@y
�sinh�1(�1
@uk@y)
�=1
"
@pk@x
; (6.4)
@pk@y
= 0: (6.5)
Eq. (6.5) implies that pk 6= pk(y); therefore pk = pk(x) only. Thus Eq. (6:4) can be written as
@
@y
�sinh�1(�1
@uk@y)
�=1
"
dpkdx
: (6.6)
Using dimensionless parameters de�ned in Eq.(2:14) and setting
" =�U"
hp; =
U
hp;
then Eq. (6:6) after ignoring bar for convenience, becomes
@
@y
�sinh�1(�1
@uk@y)
�=1
"
dpkdx
; (6.7)
6.2 Solution of the Problem
Solving Eq. (6.7) for uk (k = 1; 2; 3) subject to boundary conditions (2.16) - (2.18) to obtain
90

u1 = 2 �" cosh
�p1xy" + 1
�p1x
; (6.8)
u2 = �2 �" cosh
�p2xy" + �1
�p2x
; (6.9)
u3 = �2 �" cosh
�p3xy" + �1
�p3x
: (6.10)
where 1; 2; �1; �2; �1 and �2 are variable term used for brevity their values are given in
Appendix E.
The volume �uxes (per unit width) in the three regions using Eqs. (2:22) ; (2:24) and (2:26)
are given by
Q1 = h 2 +"2
�sinh[ 1]� sinh
hhp1x" + 1
i�p1x2
; (6.11)
Q2 = �h�2 +H�2 +"2
�sinh
hhp2x" + �1
i� sinh
hHp2x" + �1
i�p2x2
; (6.12)
Q3 = H�2 +"2
�sinh[�1]� sinh
hHp3x" + �1
i�p3x2
: (6.13)
Expressions for pressure gradient from Eqs. (6:11)-(6:13) are therefore
p1x =12(3h� 2Q1)"
h2; (6.14)
p2x =24Q2"
H3 � 216(Q2")h
H4 +2160Q2"h
2
H5 ; (6.15)
p3x =12(3H � 2Q3)"
H2: (6.16)
It is obvious from Eqs. (6:14)� (6:16) that p3x is constant, whereas p1x and p2x depend upon
x.
91

The stream function 1; 2; and 3 satisfying Eqs. (2:34)� (2:35) are
1 =p1x
2y 2 � "2 cosh[ 1]sinh�p1xy
"
�+ "2 sinh[ 1]� "2 cosh
�p1xy"
�sinh[ 1]
p1x2; (6.17)
2 =p2x
2(Q1 + (�h+ y)�2) + "2 �sinh
hhp2x" + �1
i� sinh
�p2xy" + �1
��p2x2
; (6.18)
and
3 =p3x
2y�2 � "2 cosh[�1]sinh�p3xy
"
�+ "2 sinh[�1]� "2 cosh
�p3xy"
�sinh[�1]
p3x2: (6.19)
It is noted from Eq. (6.5) that pressure in each region is independent of y. Assume that
pressure is continuous at the ends of the blades then using Eqs. (2:40)� (2:41) to obtain
p1 =�24hQ1"+ 24h1Q1"� 36hh1"Log
�hh1
�hh1�
+ pL; (6.20)
p2 =720h3Q2"� 108h2HQ2"+ 24hH2Q2"� 24H2h1Q2"+ 108Hh1
2Q2"� 720h13Q2"H5�
+ pL;
(6.21)
p3 =12(3H � 2Q3)"
H2(x� 1) + pL: (6.22)
Setting x = 0 in Eqs. (6:20)� (6:21) and x = 1 + l in Eq. (6:22) ; and using Eq. (2:41) to get
three representations of p0 � pL as follow:
p0 � pL =�24h0Q1"+ 24h1Q1"+ 36h0h1"Log[h0]� 36h0h1"Log[h1]
h0h1�; (6.23)
92

p0 � pL =Q2"
�24H2h0 � 108Hh02 + 720h03 � 24H2h1 + 108Hh1
2 � 720h13�
H5� ; (6.24)
p0 � pL =12(3H � 2Q3)"
H2l: (6.25)
6.3 Qualitative Features of the Flow
The qualitative features of the �ow can be described with the help of the computed solutions
as under. From Eqs. (6:8)� (6:9) ; it is noted that u2 does not change sign for each value of x,
whereas the sign of u1 and u3 may change, that is, there may be back �ow in region 1 and 3.
Particularly, u1 = 0 not only on the blade y = h but also on the the curve y = y01(x) where
y01 =�" 1 � "Arccosh
hp1x 2"
ip1x
: (6.26)
Moreover, Eq. (6:9) shows that the position y = y03 6= H where u3 = 0 is given by
y03 =�"�1 � "Arccosh
hp3x�2"
ip3x
; (6.27)
and the position y = ym3 where u3y = 0 is given by
ym3 = � sinh�p3xH
"+ �1
�: (6.28)
Thus, in regions
0 < y03 < H and 0 < ym3 < H
there is a back �ow near the upper wall y = H.
93

6.4 Forces on the Blade and the Walls
The drag and lift forces (per unit width) Fx and Fy respectively in the x- and y-direction acting
on the blades due to the �uid can be given by using Eqs. (2:53)� (2:54) as follow:
Fx =6Q1 (h1 � h0)
h1h0� 6 (h1 � h0)Q2
(H � h1)2+6�H2 � 2Hh1 + h12
�(h1 � h0)Q2
(h0 �H)(H � h1)3� 6Q1 (h1 � h0)
h1h0�
+6Q2 (h1 � h0)
(h1 �H)(h0 �H)�+9"��h21 � h20
��h21h
20
� 60Q1"h31h
30
�432Q2
3"�(h1 �H)5 � (h0 �H)5
�5(h1 �H)5(h0 �H)5�3
+
6"�h21 � h20
�h21h
20�
�6Q1"
�h31 � h30
�h31h
30�
+10368Q2
5"2�(h1 �H)9(h0 �H)9
�(h1 �H)9(h0 �H)9�5
�100776960Q1
4"7�h181 � h180
�h181 h
180
+725594112Q1
5"7�h191 � h190
�19h191 h
190
+ 6 (h1 � h0)�h13 � h12Q1 + 2h1"� 3Q1"
�h14�
�11664
�520Q1
4"4 + 1368Q12"5 + 105"6
� �h121 � h120
�h121 h
120
�432
�Q1
3"� 28Q1"2� �h51 � h50
�5h51h
50
�139968
�1640Q1
4"5 + 2340Q12"6 + 81"7
� �h141 � h140
�7h141 h
140
+
6480�22Q1
3"2 + 73Q1"3� �h71 � h70
�7h71h
70
�162
�140Q1
4"2 + 1618Q12"3 + 459"4
� �h81 � h80
�h81h
80
+
864�12Q1
5"2 + 622Q13"3 + 825Q1"
4� �h91 � h90
�h91h
90
�7776
�370Q1
4"3 + 1821Q12"4 + 261"5
�5h101 h
100�
h101 � h100�+93312
�30Q1
5"3 + 683Q13"4 + 471Q1"
5� �h111 � h110
�11h111 h
110
+18�7Q1
2"� 15"2� �h41 � h40
�h41h
40
279936�120Q1
5"4 + 1496Q13"5 + 555Q1"
6� �h131 h
130
�13h131 h
130
�36�266Q1
2"2 + 207"3� �h61 � h60
�h61h
60
+559872
�24Q1
5"5 + 164Q13"6 + 27Q1"
7� �h151 � h150
�h151 h
150
�2099520
�43Q1
4"6 + 27Q12"7�
h161 h160�
h161 � h160�+604661760
�Q1
5"6 + 3Q13"7� �h171 � h170
�17h171 h
170
+ logh21h20�6logh1h0�
� Fy; (6.29)
Fy =12"
H5h1�
�(h0 � h1)(h0 � h1)h1
�H2 � 3H(h0 + 2h1) + 15
�h02 + 2h0h1 + 3h1
2��
Q2 +H5(3h1 + 2Q1) +H
5h1(3h0 + 2Q1) logh1h0
�:
94

The force (per unit width) in the x-direction on the portion 0 � x � 1 of the lower wall
y = 0 due to the �uid using Eq. (2:57) is
F0 =1
h02h1
2 212�192(h0 � h1)
�27h0
2h12 + 36h0h1Q1
2 � 4(h0 + h1)Q13�
+h02h1
2�6h0 � h03 + h02Q1 + h1
��6 + h12 � h1Q1
�� 2 + h0
2h12�h03 � h02Q1+
h12(�h1 +Q1)
� 3 � 4h02h12Q1
�2592 + 2
�log
h0h1
�+ lsinh[�1]: (6.30)
The force (per unit width) in the x-direction on the portion 0 � x � 1 of the upper wall
y = H due to the �uid using Eq. (2:59) is
FH =�36H2
H6
��3H(h0 � h1)(h0 + h1) + 20
��h03 + h13
��Q2 cosh
�24Q2H2
�+
�7776
�h03 � h13
�Q2
2 +H6(h0 � h1) 2�sinh
�24Q2H2
��+ sinh
�Hp2x"
+ �1
�l: (6.31)
6.5 Graph and Discussion
In this section e¤ects of di¤erent �ow parameters on the velocity pro�le, stream function and on
the volume �ow rates of the steady isothermal incompressible �ow of a Eyring �uid in a scraped
surface heat exchanger are presented. Figure 6.1 shows the e¤ect of non-Newtonian parameter
on the velocities in three regions. It is observed that velocity pro�les in three regions increase
with an increase parameter which re�ects shear thinning behaviour : Figure 6.2 shows shear
thickening e¤ect with the increasing value of " on velocity pro�le in di¤erent stations of SSHE.
It is observed that velocity decrease in each region by increasing the value of ": Figure 6.3 shows
e¤ect of favourable pressure gradient on the velocity pro�les. It is seen that velocity pro�les
increase with the increase in the value of favouarble pressure gradient. The parabolic velocity
pro�les are obtained in di¤erent stations inside SSHE which are in broad agreement with the
experimental results obtained by MRI on an �idealized� SSHE geometry [1]. In Figure 6.4
and Figure 6.5, the stream line plots show velocity distribution inside SSHE. In Figure 6.6 and
Figure 6.7, �ow rate graphs are plotted for di¤erent values of and " respectively. Figure 6.8
95

Figure 6.1: E¤ect of on velocity pro�le in three regions taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; " = 0:3; x = 1; p1x = p2x = p3x = �1:
shows plot of p1 � pL and p2 � pL as a function of x: These results are in agreement with the
result obtained by Du¤y et al. [25].
96

Figure 6.2: E¤ect of " on velocity pro�le in three regions taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; = 2; x = 1; p1x = p2x = p3x = �1:
97

Figure 6.3: E¤ects of favourable pressure gradient on velocity proile in three regions takingH = 1:7; l = 2; xp = 0:49; � = 1:25322; " = 0:5; = 2; x = 1:
98

Figure 6.4: Stream line patterens in three regions taking H = 1:7; l = 2; xp = 0:49; � =1:25322; = 2; " = 0:5; x = 1; p1x = p2x = p3x = �0:5:
Figure 6.5: Stream line patterens in three regions taking H = 1:7; l = 2; xp = 0:595; � =�1:48967; = 2; x = 1; p1x = p2x = p3x = �0:5.
99

Figure 6.6: E¤ect of on �ow rate in three regions taking l = 2; � = 1:25322; H = 3 , = 2;4; 6; 8; 10:p1x = p2x = p3x = �1:
100

Figure 6.7: E¤ect of " on �ow rate in three regions taking l = 2; � = 1:25322;H = 3 , = 3;" = 0:3; 0; 6; 0:9; 1:2:p1x = p2x = p3x = �1:
101

Figure 6.8: Plots of pressure at the edge of blades inside SSHE taking (a) H = 1:7, l = 2; � =0:5; = 2; " = 0:5:(b) H = 1:7, l = 2; � = 1:25322; = 2; " = 0:5:
6.6 Conclusion
A mathematical model of Eyring �uid �ow in a scraped surface heat exchanger is developed and
studied theoretically. Lubrication theory approximation for the �ow has been applied to simply
the equations of motion as in the case of SSHE the gaps between the blades and device walls
are assumed to be narrow. Steady isothermal �ow of a Eyring �uid around a periodic array of
pivoted scraper blade in the channel in which lower wall is moving and upper wall is at rest,
in the presence of applied pressure gradient in a direction perpendicular to the wall motion
is considered. Taking two dimensional �ow in a transverse section of SSHE, expressions for
velocity pro�les for di¤erent regions inside SSHE, the probable presence of regions of reversed
�ow under the blades, �ow rates, stream functions, and forces on the wall and on the blade are
obtained. Graphs for velocity pro�le and for di¤erent �ow parameter involved are incorporated.
It is noted that our results are in good agreement to those obtained by Du¤y et al. [25].
102

Chapter 7
Study of a Eyring-Powell Fluid in a Scraped Surface
Heat Exchanger
Flow of a Eyring-Powell �uid in a scraped surface heat exchangers is analyzed. Steady isothermal
incompressible �ow of Eyring-Powell �uid about a periodic sequence of pivoted scraper blade in
channel with one moving wall and other stationary in the presence of pressure gradient applied
in the direction transverse to the wall motion is modelled. Lubrication approximation theory
is employed to simplify the equations of motion as the gaps between the blades and device
wall are narrow. The resulting nonlinear boundary value problem is solved using Adomian
decomposition method. Expressions for velocity pro�les for di¤erent regions, �ow rates, stream
function, forces on the wall and on the blade are found. Graphical representation for velocity
pro�le and for di¤erent �ow parameters involved is also discussed.
7.1 Problem Formulation
Consider the time independent isothermal incompressible �ow of a Eyring-Powell �uid in a
channel of breadth H, in which there is a periodic sequence of properly thin plane blades
installed on slope region. The wall at y = 0 is moving with velocity U while the wall at y = H
is stationary.
The extra stress tensor S for Eyring- Powell �uid [39] is given by
103

S = �A1 +
�( 1B ) sinh
�1( 1C jA1j)�
jA1jA1; (7.1)
where � is the dynamic viscosity, C, and B are material constants with dimensions second�1
and Pascal�1 respectively.
Equations of motion for Eyring-Powell �uid using the velocity �eld de�ned in Eq. (2:7) and
LAT become
�@2uk@y2
+1
B
@
@ysinh�1
�1
C
@uk@y
�=@pk@x
; k = 1; 2; 3; (7.2)
and
@pk@y
= 0; k = 1; 2; 3: (7.3)
Eq. (7.3) implies that pk 6= pk(y); therefore, Eq. (7.2) can be written as
�@2uk@y2
+1
B
@
@ysinh�1
�1
C
@uk@y
�=dpkdx
; k = 1; 2; 3: (7.4)
Using Macluarin series expansion of the inverse sine hyperbolic function and neglecting
higher power as��� 1C @uk
@y
���� 1; then above equation becomes
�@2uk@y2
+1
B
@
@y
"1
C
@uk@y
� 16
�1
C
@uk@y
�3#=dpkdx
; (7.5)
or
@2uk@y2
=CB
(�CB + 1)
dpkdx
+1
2C2 (�CB + 1)
�@uk@y
�2 @2uk@y2
; k = 1; 2; 3: (7.6)
Using dimensionless parameters de�ned in Eq. (2:14) ; setting
�� =CB�
�CB + 1; �� =
U2
2h2pC2(�CB + 1)
;
and ignoring bar sign for simpli�cation to obtain
104

@2uk@y2
= ��dpkdx
+ ��
�@uk@y
�2 @2uk@y2
; k = 1; 2; 3: (7.7)
7.2 Solution of the Problem
The Eq. (7.7) is highly nonlinear di¤erential equation, therefore its analytical solution is not
possible. Adomian decomposition method (ADM) [46] is used to solve Eq. (7.7) subject to
boundary conditions (2:16)-(2:18). Re-writing the Eq. (7.7) in the form
Lyy(uk) = ��dpkdx
+ ��
�@uk@y
�2 @2uk@y2
; k = 1; 2; 3; (7.8)
where Lyy = @2
@y2is the di¤erential operator and assumed to be invertible such that
L�1yy =
Z Z(�)@y@y:
Applying L�1yy on both sides of Eq. (7:8) to get
uk = c1 + c2y + ��L�1yy
�dpkdx
�+ ��L
�1yy
�@uk@y
�2 @2uk@y2
!; k = 1; 2; 3; (7.9)
where c1 and c2 are function of integration. Using Eq. (4:9) ; Eq. (7.9) takes the form
1Xn=0
ukn = c1 + c2y + �� L�1yy
�dpkdx
�+ ��L
�1yy
0@ @
@y
1Xn=0
ukn
!2 @2
@y2
1Xn=0
ukn
!1A ; k = 1; 2; 3:
(7.10)
The nonlinear terms can be expanded in term of Adomian polynomial, say An given by
An = (@
@y
1Xn=0
ukn)2
@2
@y2
1Xn=0
ukn
!; k = 1; 2; 3: (7.11)
Thus, Eq. (7.10) takes the form
105

1Xn=0
ukn = c1 + c2y + ��L�1yy
dpkdx
+ ��L�1yy (An) ; k = 1; 2; 3: (7.12)
From recursive relation (7.12), we can identify the zeroth order problem as
1Xn=0
uk0 = c1 + c2y + ��L�1yy
dpkdx
; k = 1; 2; 3: (7.13)
The remaining order problems can be written in the following form:
ukn = ��L�1yy (An�1) ; k = 1; 2; 3; n � 1: (7.14)
7.2.1 Zeroth Order Solutions
The Eq. (7.13) in view of Eqs. (4.15) gives the zeroth order solutions as follow:
u10 = �(h� y)(�2 + hp1xy��)
2h; (7.15)
u20 =1
2p2x(h� y)(H � y)��; (7.16)
u30 = �(H � y)(�2 + hp3xy��)
2H: (7.17)
7.2.2 First Order Solutions
For n = 1; Eqs. (7.14) yield
uk1 = ��L�1yy (A0) ; k = 1; 2; 3; (7.18)
where
A0 =@uk0@y
@2uk0@y2
; k = 1; 2; 3: (7.19)
Thus, using the zeroth order solutions (7:15)� (7:17) ; Eq. (7.18) along with the boundary
conditions (4.23) yields
106

u11 =
�2 + h2p1x�� � 2hp1xy��
�4��
192h4p1x����2 + h2p1x��
�4��
192h4p1x��� �4�� � h
4p1x2�2���
12h3y; (7.20)
u21 =1
192p2x
3(h+H � 2y)4�3��� �1
192(h�H)4p2x3�3���; (7.21)
u31 =
�2 +H2p3x�� � 2Hp3xy��
�4��
192H4p3x����2 +H2p3x��
�4��
192H4p3x��� �4�� �H
4p3x2�2���
12H3y: (7.22)
7.2.3 Second Order Solutions
For n = 2; Eq. (7.14) yield
uk2 = ��L�1yy (A1) ; k = 1; 2; 3; (7.23)
where
A1 =
�@uk0@y
�2 @2uk1@y2
+ 2@uk0@y
@2uk0@y2
@uk1@y
; k = 1; 2; 3: (7.24)
Thus, using the zeroth order solutions (7.15)-(7.17) and �rst order solutions (7.20)-(7.22),
Eq. (7.23) along with the boundary conditions (4.29) yields
u12 = �p1x(h� y)y��288h4
�144 + hp1x��
��288y + h
�48�2h2 � 5hy + 5y2
�+ 4hp1x(h� 2y)�
5h2 � 12hy + 12y2��� + h
2p1x2�3h2 � 6hy + 4y2
� �h2 � 2hy + 4y2
��2���
; (7.25)
u22 =1
288p2x
5(h� y)(H � y)�3h2 +H2 � 2(3h+H)y + 4y2
��h2 + 3H2 � 2(h+ 3H)y + 4y2
��5��
2�; (7.26)
107

u31 = �p3x(H � y)y��
288H4
�144 +Hp3x��
��288y +H
�48�2H2 � 5Hy + 5y2
�+ 4Hp3x(H � 2y)�
5H2 � 12Hy + 12y2��� +H
2p3x2�3H2 � 6Hy + 4y2
� �H2 � 2Hy + 4y2
��2���
: (7.27)
7.2.4 Velocity Pro�le
Using zeroth, �rst and second order solutions in Eq. (4.9) to get the following results:
u1 =(y � h)288h4
�144h3(hp1xy�� � 2) + 12h2p1xy�� (12� hp1x�� (8y � h (4+)
p1x�h2 � 2hy + 2y2
����)�� + p1xy�� f144+
hp1x����288y + h
�144 + p1x��
�48�2h2 � 5hy + 5y2
�+ 4hp1x(h� 2y)�
5h2 � 12hy + 12y2���+h
2p1x2�3h2 � 6hy + 4y2
� �h2 � 2hy + 4y2
��2����
�2��; (7.28)
u2 =1
288p2x(h� y)(H � y)��
�144 + 12p2x
2�h2 +H2�
2(h+H)y) + 2y2�2��� + p2x4�3h2 +H2 � 2(3h+H)y + 4y2
��h2 + 3H2 � 2(h+ 3H)y + 4y2
��4��
2��; (7.29)
and
u3 =(y �H)288H4
�144H3(Hp3xy�� � 2) + 12H2p3xy�� (12�Hp3x�� (8y �H�
4 + p3x�H2 � 2Hy + 2y2
������
�� + fp3xy��144 +Hp3x����288y +H
�144 + p3x��
�48�2H2 � 5Hy + 5y2
�+ 4Hp3x(H � 2y)�
5H2 � 12Hy + 12y2���++H
2p3x2�3H2 � 6Hy + 4y2
� �H2 � 2Hy + 4y2
��2����
�2��:
(7.30)
The volume �ow rates in various stations of SSHE using Eqs. (2:22) ; (1:18) and (2:26) are
108

Q1 =h
2� 1
12h3p1x�� �
1
12hp1x���� �
1
240h5p1x
3�3��� �p1x���
2�
12h�
1
36h3p1x
3�3��2� �
h7p1x5�5��
2�
1344; (7.31)
Q2 =560(h�H)3p2x�� + 28(h�H)5p2x3�3��� + 5(h�H)7p2x5�5��2�
6720; (7.32)
and
Q3 =H
2� 1
12H3p3x�� �
1
12Hp3x���� �
1
240H5p3x
3�3��� �p3x���
2�
12H�
1
36H3p3x
3�3��2� �
H7p3x5�5��
2�
1344: (7.33)
To �nd the values of pressure gradient in the three regions the Eqs. (7.31)-(7.33) are
approximated using Maclaurin�s series. Therefore
p1x =6(h� 2Q1)h�� (h2 + ��)
; (7.34)
p2x =12Q2
(h�H)3��; (7.35)
p3x =6(H � 2Q3)
H�� (H2 + ��): (7.36)
It is observed that Eq.: (7:36) is constant, whereas Eqs.: (7:34 )- (7.35)varies with x.
The stream function 1; 2; and 3 satisfying Eqs. (2:34)� (2:35) are
109

1 =1
20160h4y�1680h3(�6y + h(12 + p1xy(�3h+ 2y)��))� 84h2p1xy�� f�40y�
�40y + h�60 + p1x��
�20(h� y)2 + hp1x
�5h3 � 10h2y + 10hy2 � 4y3
������
���
�5p1xy���672y + h
�1008 + p1x��
�1008(h� y)2 + 112hp1x
�6h3 � 14h2y + 15hy2 � 6y3
���
+28h2p1x2(h� y)2
�5h2 � 8hy + 8y2
��2� + h
3p1x3�21h5 � 70h4y + 140h3y2�
�168h2y3 + 112hy4 � 32y5��3����
; (7.37)
2 =1
20160
�20160Q1 + p2x(h� y)2��
�1680(h� 3H + 2y) + 84p2x
2
�h3 � 5h2H + 5hH2 � 5H3 + 2
�h2 + 5H2
�y � 2(h+ 5H)y2 + 4y3
��2���
+5p2x4�3h5 � 21h4H + 42h3H2 � 70h2H3 + 35hH4 � 21H5
+2�3h4 + 42h2H2 + 35H4
�y � 4
�3h3 + 21h2H + 21hH2 + 35H3
�y2
+8�5h2 + 14hH + 21H2
�y3 � 16(3h+ 7H)y4 + 32y5
��4��
2��; (7.38)
3 =1
20160H4y�1680H3(�6y +H(12 + p3xy(�3H + 2y)��))� 84H2p3xy�� f�40y�
�40y +H�60 + p3x��
�20(H � y)2 +Hp3x
�5H3 � 10H2y + 10Hy2 � 4y3
������
���
�5p3xy���672y +H
�1008 + p3x��
�1008(H � y)2 + 112Hp3x
�6H3 � 14H2y + 15Hy2 � 6y3
���
+28H2p3x2(H � y)2
�5H2 � 8Hy + 8y2
��2� +H
3p3x3�21H5 � 70H4y + 140H3y2�
�168H2y3 + 112Hy4 � 32y5��3����
: (7.39)
Eq. (7.3) shows that pk 6= pk (y). Assuming that pressure is continuous at the edge of the
blades, then Eqs. (2:40)� (2:41) yield
p1 =
6p��
�Arctan hp
���Arctan h1p
��
�+ 6Q1
��2log hh1 + log
h2+��h1
2+��
�����1��
+ pL; (7.40)
110

p2 =6(h� h1)(h� 2H + h1)Q2(h�H)2(H � h1)2���1
+ pL; (7.41)
p3 =6(H � 2Q3)(�1 + x)H�� (H2 + ��)
+ pL: (7.42)
Taking x = 0 in Eqs. (7:40)� (7:41) ; x = 1 + l in Eq. (7:42) ; and using Eq. (2:41) to get
three representations of p0 � pL as follow:
p0 � pL =6p��
�Arctan h0p
���Arctan h1p
��
�+ 6Q1
�2logh1h0 � log
h12+��
h02+��
����1��
; (7.43)
p0 � pL =6(h0 � h1)(�2H + h0 + h1)Q2(�H + h0)2(H � h1)2���1
; (7.44)
p0 � pL =6l(H � 2Q3)H�� (H2 + ��)
: (7.45)
7.3 Forces Inside Channel
The drag and lift forces Fx; Fy respectively acting per unit width on the blades due to the �uid
in the x� and y� directions can be given by using Eqs. (2:53)� (2:54) respectively. Thus
111

Fx =(h0 � h1)
2H11h03h1
3��3�
��144H11h0
3h13(85(h0 + h1)� 36Q1)Q14 � 12H11h0
3h13(401(h0 + h1)
�756Q1)Q12�� + 3H11h02h1
2�35h0h1(h0 + h1)� 372h0h1Q1 � 384Q13
��2�
+12H8h0h1��6H3Q1(�2h0h1 + (h0 + h1)Q1) + h02h12(�H + h0 + h1)Q2
��3�+
H4�H7�3h0h1(h0 + h1)� 4
�h02 + h0h1 + h1
2�Q1�+ 144h0
3h13(�H + 3(h0 + h1))Q2
3��4�
+5184h03h1
3(�H + 5(h0 + h1))Q25�5�
�� 3
��
244Q1cot�1 h0p��p
���4Q1cot�1 h1p
��p��
+�2(h0 � h1)2Q2 � (H � h0)(H � h1)2logh1
2+��h0
2+��
(H � h0)(H � h1)2+
2h0
�p��
��Arctan h0p
��+Arctan h1p
��
�+Q1
��2logh1h0 + log
h12+��
h02+��
����
3775 ; (7.46)
Fy =3
��
244Q1cot�1 h0p��p
���4Q1cot�1 h1p
��p��
+�2(h0 � h1)2Q2 � (H � h0)(H � h1)2logh1
2+��h0
2+��
(H � h0)(H � h1)2
+
2h0
�p��
��tan�1 h0p
��+ tan�1 h1p
��
�+Q1
��2logh1h0 + log
h12+��
h02+��
����
3775 : (7.47)
The force in the x- direction on the segment 0 � x � 1 of the lower wall y = 0 and upper
wall y = H due to the �uid using Eqs. (2:57) and (2:59) are
112

F0 =1
2h03h1
3��3�
�144h0
3(h0 � h1)h13(5(h0 + h1)� 36Q1)Q14
�12h03(h0 � h1)h13Q12(13(h0 + h1) + 204Q1)�� + 3h02(h0 � h1)h12�15h0h1(h0 + h1)� 212h0h1Q1 � 384Q13
��2� + 72h0h1(�h0 + h1)Q1(2h0h1 � (h0 + h1)Q1)�3�+�
�3h0h13 + h03(3h1 � 4Q1) + 4h13Q1��4� � 2h03h13��
�1440Q1
4 + 744Q12�� + 19�
2��log
h1h0
�+l
�� 1H� 1
288H3
�144H4p3x�� + 12H
2p3x���12 +H2p3x��
�4 +H2p3x��
����
+p3x���144 +H2p3x��
�144 + p3x��
�96H2 + 20H4p3x�� + 3H
6p3x2�2����
�2��; (7.48)
FH =6
5Q2
��5(H � h0)8 + 12(H � h0)4Q22�� + 240Q24�2�
(H � h0)9+
5(H � h1)8 + 12(H � h1)4Q22�� + 240Q24�2�(H � h1)9
�� 1
288H4
�144H3
��2 +H2p3x��
�+12H3p3x��
�12 +Hp3x��
��8H +H
�4 +H2p3x��
����� +Hp3x���
144 +Hp3x����288H +H
�144 + p3x��
�96H2 � 20H4p3x�� + 3H
6p3x2�2�����
�2��l: (7.49)
7.4 Graphs and Discussion
The time independent isothermal incompressible �ow of a Eyring-Powell �uid in a SSHE is
analyzed. Impact of various �ow parameters on the velocity pro�le, stream function and volume
�ow rates is studied via Tables and graphs. Tables 7.1 , 7.2, 7.3 show velocity distribution
in various stations of SSHE while Tables 7.4-7.5 present �ow rate distributions. Figure 7.1
indicates the impact of non- Newtonian �ow parameter �� on velocity pro�les in three regions.
It is observed that velocities in each region increase with an increase in the value of parameter
��. Figure 7.2 shows the e¤ect of non- Newtonian �ow parameter �� in three regions. It is
observed that velocities in region 1 and region 3 rise with an increase in the value of parameter
��; on the other hand, in region 2 velocity pro�le remain the same as �ow is very weak in
this region in comparison to the other regions of SSHE. Both non-Newtonian parameters ��
113

Fixing H = 3; xp = 0:49; x = 1; p1x = p2x = p3x = �1y �� = 0:2,�� = 1 �� = 1.2, �� = 1 �� = 1; �� = 0:2 �� = 1; �� = 1:20:0 1:00000 1:00000 1:00000 1:000000:1 0:96078 1:08979 1:02090 1:065860:2 0:91912 1:16502 1:03175 1:120880:3 0:87495 1:22713 1:03260 1:165830:4 0:82822 1:27712 1:02344 1:201200:5 0:77885 1:31563 1:00424 1:227240:6 0:72677 1:34291 0:97491 1:243840:7 0:67188 1:35867 0:93532 1:250370:8 0:61411 1:36182 0:88529 1:245550:9 0:55334 1:35018 0:82458 1:227141:0 0:48948 1:32001 0:75287 1:191631:1 0:42241 1:26548 0:66978 1:133921:2 0:35201 1:17805 0:57482 1:046831:3 0:27817 1:04569 0:46743 0:920671:4 0:20071 0:85212 0:34688 0:742661:5 0:11952 0:57579 0:21235 0:496351:6 0:03441 0:18890 0:06284 0:16096
Table 7.1: Velocity distribution in Region 1 of SSHE for Eyring Powell Fluid..
and �� depict shear thinning behavior. Figure 7.3 re�ects the impact of pressure gradient on
the velocity pro�les. It is seen that velocity pro�les in all the three stations increase with the
increase in the value of favourable pressure gradient. In Figure 7.1(b) Figure 7.2(b) and Figure
7.3(b) parabolic velocity pro�les are obtained in various region of SSHE are obtained which are
good agreement with the experimental results obtained through MRI [1]. Figure 7.4 and Figure
7.5 show the stream line patterns which re�ect velocity distribution inside SSHE. Figure 7.6
shows plot of �ow rate in three regions for di¤erent values of l. It is observed that volume �ow
rate pro�les are symmetric about xp = 12 : Figure 7 shows plot of �ow rate in three regions for
di¤erent values of ��: It is observed that �ow rate increases in each region with the increase
in the values non-Newtonian parameter ��: Figure 7.8 shows plot of p1 � pL and p2 � pL as a
function of x.
114

Fixing H = 3; xp = 0:49; x = 1; p1x = p2x = p3x = �1y �� = 0:2; �� = 1 �� = 1:2; �� = 1 �� = 1; �� = 0:2 �� = 1; �� = 1:2
1:63914 0:000000 0:000000 0:000000 0:0000001:73914 0:012676 0:098607 0:074837 0:0748371:83914 0:023326 0:174518 0:134339 0:1343391:93914 0:031956 0:232105 0:180591 0:1805912:03914 0:038574 0:274234 0:215005 0:2150052:13914 0:043186 0:302686 0:238500 0:2385002:23914 0:045796 0:318489 0:251630 0:2516302:33914 0:046405 0:322146 0:254676 0:2546762:43914 0:045013 0:313768 0:247702 0:2477022:53914 0:041620 0:293099 0:230562 0:2305622:63914 0:036223 0:259452 0:202877 0:2028772:73914 0:028818 0:211536 0:163962 0:1639622:83914 0:019398 0:147190 0:112725 0:1127252:93914 0:0079569 0:063017 0:047512 0:047512
Table 7.2: Velocity distribution in Region 2 of SSHE for Eyring Powell Fluid..
Fixing H = 3; xp = 0:49; x = 1; p1x = p2x = p3x = �1y �� = 0:2; �� = 1 �� = 1:2; �� = 1 �� = 1; �� = 0:2 �� = 1; �� = 1:20:0 1:000000 1:000000 1:000000 1:0000000:2 0:994369 2:117930 1:249780 1:7209100:4 0:980718 2:883250 1:448790 2:2400100:6 0:959000 3:437780 1:601420 2:6319700:8 0:929139 3:862960 1:710640 2:9399301:0 0:891027 4:202760 1:778360 3:1877801:2 0:844520 4:480410 1:805670 3:3887401:4 0:789434 4:708590 1:792930 3:5503201:6 0:725543 4:893360 1:739890 3:6755201:8 0:652566 5:031660 1:645540 3:7603602:0 0:570168 5:102490 1:507990 3:7877802:2 0:477946 5:051680 1:324170 3:7177502:4 0:375425 4:770270 1:089470 3:4738202:6 0:262045 4:066610 0:797251 2:9258502:8 0:137156 2:632000 0:438270 1:8691703:0 0:000000 0:000000 0:000000 0:000000
Table 7.3: Velocity distribution in Region 3 of SSHE for Eyring Powell Fluid..
115

With H = 1:4, � = 0:4; x = 1; p1x = p2x = p3x = �1;�� = 1:
�� Q1 Q2 Q30:00 0:602000 0:000000 0:7000000:25 0:681673 0:000157 0:8027630:50 0:766959 0:000314 0:9150030:75 0:863792 0:000471 1:0471101:00 0:978744 0:000629 1:2113301:25 1:119350 0:000787 1:4226501:50 1:294410 0:000945 1:6997301:75 1:514350 0:001105 2:0658402:00 1:791500 0:001265 2:5497502:25 2:140410 0:001426 3:1866902:50 2:578220 0:001589 4:0192002:75 3:124920 0:001752 5:0981503:00 3:803730 0:001917 6:483540
Table 7.4: Flow rate distribution as function of Non-Newtonian parameter..
Fixing H = 1:4,� = 0:4; x = 1; p1x = p2x = p3x = �1;�� = 1:
�� Q1 Q2 Q30:00 0:747445 0:000627 0:928670:25 0:782690 0:000628 0:972410:50 0:832989 0:000628 1:034100:75 0:898340 0:000628 1:113741:00 0:978744 0:000629 1:211331:25 1:074200 0:000629 1:326871:50 1:184710 0:000629 1:460361:75 1:310280 0:000629 1:611792:00 1:450890 0:000629 1:781182:25 1:606560 0:0006302 1:968512:50 1:777280 0:0006305 2:173792:75 1:963060 0:000631 2:397023:00 2:163890 0:000631 2:63820
Table 7.5: Flow rate distribution as function of Non-Newtonian parameter..
116

Figure 7.1: E¤ect of Non-Newtonian parameter �� on velocity pro�les by �xing H = 1:7; l = 2;xp = 0:49; � = 1:25322; x = 1; �� = 1; p1x = p2x = p3x = �0:5:
117

Figure 7.2: E¤ect of Non-Newtonian parameter �� on velocity pro�les in three regions by �xingH = 1:7; l = 2; xp = 0:49; � = 1:25322; x = 1; �� = 1; p1x = p2x = p3x = �0:5:
118

Figure 7.3: Impact of favourable pressure gradient on velocity pro�le in three regions by �xingH = 1:7; l = 2; xp = 0:49; � = 1:25322; x = 1; �� = �� = 1:
119

Figure 7.4: Stream lines patterns in di¤erent regions of SSHE taking H = 1:7; l = 2; xp = 0:49;� = 1:25322; �� = �� = 1:
Figure 7.5: Stream lines patterns in di¤erent regions of SSHE taking H = 3; l = 0:5; xp = 0:595;� = �1:48967; �� = 1; �� = 0:5:
120

Figure 7.6: Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 1:25322; �� =�� = 1, for l = 0; 0:1; 0:25; 0:5; 1; 2; 4; 10:
121

Figure 7.7: Plots of �uxes Q1, Q2 and Q3 as a function of xp with H = 3; � = 1:25322; �� =�� = 1, for l = 1; �� = 1; 2; 3; 4; 5; 6; 7:
Figure 7.8: Plots of pressure at the edge of blades inside SSHE taking (a) H = 1:7; l = 2;xp = 0:49; � = 0:5; �� = �� = 1:(b) H = 1:7; l = 2; xp = 0:49; � = 1:25322; �� = �� = 1:
122

7.5 Conclusion
Flow of a Eyring-Powell �uid model around a periodic array of pivoted scraper blade in channel
with one moving wall and other stationary in the presence of pressure gradient applied in the
direction of moving wall is analyzed. Adomian decomposition method is employed to obtain
expressions for velocity pro�les in di¤erent regions inside SSHE, �ow rates, stream functions,
forces on the wall and on the blade. Graphs for velocity pro�le and for di¤erent �ow parameters
involved are incorporated. It is noted that results obtained in this chapter are in good agreement
to those obtained by Du¤y et al. [25] under same physical conditions. Work presented in this
chapter will provide quantitative understanding of some basic features of the non-Newtonian
�uid �ow within a SSHE and will provide some bene�cial information for subsequent studies of
more complicated physical e¤ects.
123

Chapter 8
Study of a Co-Rotational Maxwell Fluid in a
Scraped Surface Heat Exchanger
In this Chapter �ow of a Maxwell �uid model in a scraped surface heat exchangers (SSHE)
is modelled and studied theoretically. Flow for steady incompressible isothermal �ow of a
Maxwell �uid model about a periodic arrangement of pivoted scraper blade in channel for
generalized Couette �ow is considered and equations of motion are simpli�ed using lubrication-
approximation theory (LAT) as in SSHE the gaps between the blades and the device walls
are assumed to be narrow. The resulting non linear boundary value problem is solved using
Adomian decomposition method. Expressions for velocity pro�les in di¤erent regions, �ow rates
and stream function are found. Graphical representation for velocity pro�le and for di¤erent
�ow parameter involved is also discussed.
8.1 Problem Formulation
Consider the steady incompressible, isothermal �ow of a Maxwell �uid in channel of width H
when there is arrangement of several inclined thin plane blades. The wall at y = 0 is moving
with stream velocity U while the other wall at y = H is stationary.
The constitutive equations of motion for a co-rotational Maxwell �uid are
�DV
Dt= div �+�b; (8.1)
124

� = �pI+ S; (8.2)
and DDt denotes the material time derivative de�ned as
D (�)Dt
=@
@t(�) + (V:r) (�) ; (8.3)
and S is the extra stress tensor de�ned for a co-rotational Maxwell �uid model [41,42] as
S+ �1rS+
1
2�1 (A1S+ SA1) = �0A1; (8.4)
where �0 and �1 are zero shear viscosity and relaxation time, respectively. The upper con-
travariant convected derivative designated by r over S is de�ned as
rS =
D (S)
Dt� f(rV)T S+ S (rV)g: (8.5)
Using the velocity �eld de�ned in Eq. (2:7) and LAT, equations of motion take the form
@pk@x
=@
@y
264 �0@uk@y
1 + �21
�@uk@y
�2375 ; k = 1; 2; 3; (8.6)
and
0 =@pk@y
� @Syy@y
; k = 1; 2; 3: (8.7)
De�ning modi�ed pressure epk = pk � Syy; Eqs. (8:6)� (8:7) becomes
@epk@x
=@
@y
264 �0@uk@y
1 + �21
�@uk@y
�2375 ; k = 1; 2; 3; (8.8)
0 =@epk@y
; k = 1; 2; 3: (8.9)
Eq. (8.9) implies that epk 6= epk(y); therefore, Eq. (8.8) yields
125

depkdx
=@
@y
264 �0@uk@y
1 + �21
�@uk@y
�2375 ; k = 1; 2; 3: (8.10)
Using dimensionless parameters de�ned in Eq. (2:14) and setting
Wi =�1U
hp;
Thus Eq. (8:10) yield
dpkdx
=@
@y
264 @uk@y
1 +Wi2�@uk@y
�2375 ; k = 1; 2; 3: (8.11)
For convenience, bar sign in Eq. (8:11) are dropped.
8.2 Solution of the Problem
Integrating Eq. (8:11) with respect to y to obtain
@uk@y
=
�dpkdx
y + c1
� 1 +Wi2
�@uk@y
�2!; k = 1; 2; 3: (8.12)
The Eq. (8.12) is nonlinear di¤erential equation, and its analytical solution is not possible.
Adomian decomposition method [46] is used to handle the nonlinearity of the governing equation
of motion. Re-writing the Eq. (8.12) in the form
Ly(uk) =
�dpkdx
y + c1
� 1 +Wi2
�@uk@y
�2!; k = 1; 2; 3; (8.13)
where Ly = @@y di¤erential operator assumed to be invertible and its inverse is de�ned by
L�1y =
Z(�)@y:
Applying L�1y on both sides of Eq. (8:13); to get
126

uk = c2 + L�1y
"�dpkdx
y + c1
� 1 +Wi2
�@uk@y
�2!#; k = 1; 2; 3; (8.14)
where c1 and c2 are functions of integration. In term of ADM, uk can be written in component
form as
uk =1Xn=0
ukn; k = 1; 2; 3: (8.15)
Thus, Eq. (8.14) takes the form
1Xn=0
ukn = c2 +
�dpkdx
y2
2+ c1y
�+Wi2L�1y
"�dpkdx
y + c1
��@uk@y
�2#; k = 1; 2; 3: (8.16)
Adomian also suggested that the nonlinear terms can be expanded in the form of Adomian
polynomial, say An given by
An =
"�dpkdx
y + c1
��@ukn@y
�2#; k = 1; 2; 3: (8.17)
Thus, Eq. (8.16) takes the form
1Xn=0
ukn = c2 +
�dpkdx
y2
2+ c1y
�+Wi2L�1y [An] ; k = 1; 2; 3: (8.18)
From recursive relation (8.18), the zeroth order problem can be signify as
uk0 = c2 +
�dpkdx
y2
2+ c1y
�; k = 1; 2; 3; (8.19)
subject to boundary conditions de�ned in Eq. (4:15) :
The remaining order problems are in the following form:
ukn =Wi2L�1y (An�1) ; n � 1; k = 1; 2; 3; (8.20)
with boundary conditions de�ned in Eq. (4:17) :
127

8.2.1 Zeroth Order Solutions
Solving Eq. (8.19) subject to the boundary conditions (4.15) to obtain
u10 = �(h� y)(�2 + hp1xy)
2h; (8.21)
u20 =1
2p2x(h� y)(H � y); (8.22)
u30 = �(H � y)(�2 +Hp3xy)
2H: (8.23)
8.2.2 First Order Solutions
For n = 1; Eq. (8.20) yield
uk1 =Wi2L�1y (A0) ; k = 1; 2; 3; (8.24)
where
A0 =
"�dpkdx
y + c1
��@uk0@y
�2#: (8.25)
Thus using the zeroth order solutions (8:21) � (8:23), Eq. (8.20) along with the boundary
conditions (4.23) yields
u11 =Wi2
4h2
�h2p1x
3y4 +�2 + h2p1x
�2y�4 +
1
2p1x�2 + h2p1x
�y2�2 + h2p1x � 4h�4
��43hp1x
2y3�2 + h2p1x � h�4
��; (8.26)
u21 =1
4p2x
2Wi2�p2xy
4 +1
2(h+H)y2(hp2x +Hp2x � 4�4)�
4
3y3(hp2x +Hp2x � �4)
+(h+H)2y�4�+ �5; (8.27)
128

u31 =Wi2
4H2
�H2p3x
3y4 +�2 +H2p3x
�2y�4 +
1
2p3x�2 +H2p3x
�y2�2 +H2p3x � 4H�4
��43Hp3x
2y3�2 +H2p3x �H�4
��: (8.28)
8.2.3 Second Order Solutions
For n = 2; Eq. (8.20) yields
uk2 =Wi2L�1y (A1) ; k = 1; 2; 3; (8.29)
where
A1 =
�dpkdx
y + c1
��duk1dy
�2; k = 1; 2; 3: (8.30)
Thus, using �rst order solutions (8.26)-(8.28) in Eq. (8.29) along with the boundary condi-
tions (4.29) to obtain
u12 =1
3360h4Wi6y
�7p1xy
�3y2
�10�2
2 � 24y�2�3 + 15y2�32�+ 5y�1(8�2 � 9y�3)�4 + 15�12�24
�+14
�y2�20�2
2 � 45y�2�3 + 27y2�32�+ 30y�1(�2 � y�3)�4 + 15�12�24
��5
+60h4p1x6y6(7p1xy + 8�5) + 4h
2p1x3y3 f4p1xy(5y(7�2 � 9y�3) + 21�1�4)+
+21�8y�2 � 10y2�3 + 5�1�4
��5�; (8.31)
u22 =1
16p42xWi6
�2p2x
3y8 � 167p2x
2y7(��13 + 2�2) +4
3p2xy
6(p2x�1 + 2�2(�2�13 + �2))
+y�13�32�4
2 +1
2y2�3�4(2�1�13 + p2x�3�4) +
8
5y5 (p2x�1(�13 � �2)
+2�13�22 + p2x
2�3�4�+1
4y4��8�1�13�2 + p2x
��12 + 8(�13 � �2)�3�4
��+
1
3y3�2p2x�1�3�4 + �13
��12 � 8�2�3�4
���+ �14; (8.32)
129

u31 =1
3360H4Wi6y
�7p3xy
�3y2
�10�2
2 � 24y�2�3 + 15y2�32+
5y�1(8�2 � 9y�3)�4 + 15�12�42�+ 14
�y2�20�2
2 � 45y�2�3 + 27y2�32�+
30y�1(�2 � y�3)�4 + 15�12�42��5 + 60H
4p3x6y6(7p3xy + 8�5)+
4H2p3x3y3�4p3xy(5y(7�2 � 9y�3) + 21�1�4) + 21
�8y�2 � 10y2�3 + 5�1�4
��5��: (8.33)
8.2.4 Velocity Pro�le
Using zeroth, �rst and second order solutions in Eq. (8.15), the following result are obtained:
u1 = 1 +1
8p1x
7Wi6y8 + y2�10 + y3�11 + y�12 + y
7�6 + y6�7 + y
5�8 + y4�9; (8.34)
u2 =hHp2x2
+1
8p72xWi6y8 + �14 +
1
12p52xWi6y6�15 +
1
10p42xWi6y5�16 + y�17
+y2�18 + y4�19 �
1
7p62xWi6y7(��13 + 2�2) + y3�20 + �5; (8.35)
and
u3 = 1 +1
8p3x
7Wi6y8 + y2�10 + y3�11 + y�12 + y
7�6 + y6�7 + y
5�8 + y4�9; (8.36)
where �1;�2; :::;�12 and �1;�2; :::;�20 and �1;�2; :::;�12 are variables terms used to simplify
above velocities expressions, there values are given in Appendix F.
The volume �ow rate in three stations using Eq. (2:22) ; (2:24) and (2:26) are given by
Q1 = h+1
72h9p1x
7Wi6 +h3�103
+h4�114
+h2�122
+h8�68
+h7�77
+h6�86
+h5�95
; (8.37)
130

Q2 = �12h2Hp2x +
1
2hH2p2x �
1
72h9p72xWi6 +
1
72H9p72xWi6 � 1
56h8p62xWi6�13 +
1
56H8p62xWi6�13
�h�14 +H�14 �1
84h7p52xWi6�15 +
1
84H7p52xWi6�15 �
1
60h6p42xWi6�16 +
1
60H6p42xWi6�16�
h2�172
+H2�172
� h3�183
+H3�183
� h5�195
+H5�195
+1
28h8p62xWi6�2 �
1
28H8p62xWi6�2 �
h4�204
+H4�204
� h�5 +H�5; (8.38)
and
Q3 = H+1
72H9p3x
7Wi6+H3�103
+H4�114
+H2�122
+H8�68
+H7�77
+H6�86
+H5�95
: (8.39)
The stream function 1; 2; and 3 satisfying Eq.(2:34)� (2:35), are
1 =1
25202520y + 35p1x
7Wi6y9 + 840y3�10 + 630y4�11 + 1260y
2�12 +
315y8�6 + 360y7�7 + 420y
6�8 + 504y5�9; (8.40)
2 =1
2520
��1260h2Hp2x + 2520Q1 � 35h9p2x7Wi6 + 1260hHp2xy + 35p2x
7Wi6y9
�45h8p2x6Wi6�13 + 45p2x6Wi6y8�13 � 2520h�14 + 2520y�14�
30h7p2x5Wi6�15 + 30p2x
5Wi6y7�15 � 42h6p2x4Wi6�16 + 42p2x4Wi6y6�16�
1260h2�17 + 1260y2�17 � 840h3�18 + 840y3�18 � 504h5�19 + 504y5�19
+90h8p2x6Wi6�2 � 90p2x6Wi6y8�2 � 630h4�20 + 630y4�20 � 2520h�5 + 2520y�5
�; (8.41)
3 =1
25202520y + 35p3x
7Wi6y9 + 840y3�10 + 630y4�11 + 1260y
2�12 + 315y8�6
+360y7�7 + 420y6�8 + 504y
5�9: (8.42)
131

8.3 Graphs and Discussion
The steady isothermal incompressible �ow of a co-rotational Maxwell �uid in a SSHE is studied.
The equations of motion governing the �uid �ow are simpli�ed using lubrication approximation
theory as for the �ow inside SSHE, Reynolds number and aspect ratios are assumed to be
very small. Tables 8.1, 8.2 and 8.3 show velocity distribution in di¤erent station of SSHE. It is
observed that velocities decreases in region 1 and 3 whereas in region 2 �rst velocity increases at
the middle of region and then decreases, moreover for Wi = 0; 0:2 velocities decreases similarly
and more rapidly in comparison to value of Wi = 1:2. Table 8.4 shows �ow rate distribution in
di¤erent station of SSHE, it is observed that values of �ow rate increases with increase in the
values of Weisenberg number.
Figure 8.1 and Figure 8.2 re�ect the impact of pressure gradient on velocity �eld in three
regions for two di¤erent values of a. It is observed that velocity in each region increases with
increasing favourable pressure gradient. Figure 8.3 shows the e¤ect of non- Newtonian �ow
parameterWi for Maxwell �uid on velocity pro�le in three regions . It is observed that velocities
in all three regions increases with increasing value of parameter Wi: It is also seen that this
rise in velocity is more rapid in region 3. Figure 8.4 and 8.5 show stream lines pattern which
indicate velocity distribution inside SSHE for di¤erent values of favourable pressure gradient
and Weisenberg number. Figure 8.6 and 8.7 show that �ow rate increases with increasing
favourable pressure gradient and Weissenberg number respectively.
132

Fixing xp = 0:49; � = 1:25322; x = 1; p1x = �1:y Wi = 0:2 Wi = 1:2 Wi = 0
0:0 1:00000 1:00000 1:000000:1 1:01608 1:02113 1:015950:2 1:02205 1:02782 1:021900:3 1:01801 1:02413 1:017850:4 1:00403 1:01292 1:003800:5 0:98018 0:99648 0:979750:6 0:94646 0:97642 0:945690:7 0:90290 0:95322 0:901650:8 0:84946 0:92592 0:847590:9 0:78611 0:89209 0:783551:0 0:71278 0:84813 0:709491:1 0:62937 0:78982 0:625451:2 0:53576 0:71285 0:531391:3 0:43183 0:61299 0:427351:4 0:31739 0:48526 0:313291:5 0:19228 0:32145 0:189241:6 0:05626 0:10525 0:05519
Table 8.1: Velocity distribution in region 1 of SSHE.
xp = 0:49; � = 1:25322; x = 1; p2x = �1y Wi = 0:2 Wi = 1:2 Wi = 0
1:63914 5.55� 10�17 6.82� 10�13 0:0000001:73914 0:064052 0:111692 0:0630431:83914 0:117697 0:190165 0:1160861:93914 0:161063 0:245742 0:1591292:03914 0:194254 0:284248 0:1921722:13914 0:217348 0:309150 0:2152142:23914 0:230401 0:322559 0:2282572:33914 0:233444 0:325617 0:2313002:43914 0:226485 0:318587 0:2243432:53914 0:209507 0:300864 0:2073862:63914 0:182469 0:270951 0:1804292:73914 0:145306 0:226274 0:1434722:83914 0:097929 0:162615 0:0965152:93914 0:040227 0:072722 0:039558
Table 8.2: Velocity distribution in region 2 of SSHE.
133

Fixing xp = 0:49; � = 1:25322; x = 1;H = 3; p3x = �1:y Wi = 0:2 Wi = 1:2 Wi = 0
0:0 1:00000 1:00000 1:000000:2 1:23157 6:64769 1:213330:4 1:41573 8:69677 1:386670:6 1:55477 9:39438 1:520000:8 1:65057 9:63448 1:613331:0 1:70462 9:71805 1:666671:2 1:71802 9:73376 1:680001:4 1:69148 9:71164 1:653331:6 1:62533 9:66369 1:586671:8 1:51951 9:58692 1:480002:0 1:37358 9:46557 1:333332:2 1:18673 9:27116 1:146672:4 0:957745 8:91997 0:9200002:6 0:685024 8:10941 0:6533332:8 0:366579 5:91614 0:3466673:0 1.72� 10�16 2.15� 10�12 0:000000
Table 8.3: Velocity distribution in region 3 of SSHE.
Fixing xp = 0:49; � = 0:4; x = 1;H = 1:4; p1x = p2x = p3x = �1.Wi Q1 Q2 Q30:00 0:747445 0:000628 0:9286670:05 0:747625 0:000628 0:9288430:10 0:748166 0:000628 0:9293740:15 0:749068 0:000628 0:9302580:20 0:750331 0:000627 0:9314960:25 0:751956 0:000627 0:9330890:30 0:753943 0:000627 0:9350360:35 0:756295 0:000627 0:9373410:40 0:759015 0:000628 0:9400060:45 0:762108 0:000628 0:9430360:50 0:765581 0:000628 0:9464360:55 0:769444 0:000628 0:9502170:60 0:773711 0:000628 0:9543910:65 0:778400 0:000628 0:9589730:70 0:783534 0:000629 0:9639840:75 0:789142 0:000629 0:969450:80 0:795260 0:000629 0:975404
Table 8.4: Flow rate distribution in di¤erent regions of SSHE.
134

Figure 8.1: Impact of favourable pressure gradient on velocity pro�les in three region by �xingH = 3; l = 1; xp = 0:49; � = 1:25322; x = 1;Wi = 0:02:
135

Figure 8.2: Impact of favourable pressure gradient on velocty pro�le in three regions by �xingH = 1:7; l = 0:5; xp = 0:595; � = �1:48967; x = 1; Wi = 0:8:
136

Figure 8.3: E¤ect of Weisenburg number on velocity pro�les in three regions by �xing H = 3;l = 1; xp = 0:49; � = 1:25322; x = 1; p1x = p2x = p3x = �1:
Figure 8.4: Stream lines patterns in di¤erent regions of SSHE taking (a) H = 3; xp = 0:49; � =1:25322;Wi = 0:1; p1x = p2x = p3x = �1:(b) H = 3; l = 2; xp = 0:595; � = �1:48967;Wi =0:001:
137

Figure 8.5: Stream lines patterns in di¤erent regions of SSHE with H = 3; l = 2; xp = 0:595;� = �1:48967;Wi = 0:001; p1x = p2x = p3x = �1:
Figure 8.6: Plot of �uxes Q1, Q2 and Q3 depending on xp with H = 3; � = 1:25322;Wi = 0:01and varying p1x = p2x = p3x = �0:1;�0:2;�0:4;�0:6;�0:8;�1:
138

Figure 8.7: E¤ect of Weisenburg number on volume �ow rate �xing H = 3; � = 1:25322;p1x = p2x = p3x = �0:5 and varrying Wi = 0:1; 0:2; 0:4; 0:6; 0:8:
139

8.4 Conclusion
Du¤y et al. [25] in there work discussed that Foodstu¤s normally behaves as non-Newtonian
in nature having shear thinning/ thickening and viscoplastic or viscoelastic behaviour. Co-
rotational Maxwell �uid model possess di¤erent �uid behaviours, that is, forWi = 0 Newtonian
behaviour for 0 < Wi < 1 shear thinning for Wi > 1 shows viscoplastic behaviour, so it is more
realistic to study �ow inside SSHE by taking this �uid model. Steady incompressible �ow of a
co-rotational Maxwell �uid in SSHE is studied, in which the Reynolds number and aspect ratio
are assumed to be very small so LAT is applicable to simplify the equations of motion. Solution
for co-rotational Maxwell �uid around a periodic arrangement of pivoted scraper blade in the
channel considering generalized Couette �ow using Adomian decomposition method is studied.
Expressions for velocity pro�les for di¤erent regions inside SSHE, �ow rates, stream functions
are obtained. Impact of di¤erent parameters on velocity �eld, �ow rate are tabulated and
presented graphically. This work will be helpful in quantitative understanding of some primary
features considering non-Newtonian nature of foodstu¤ within a SSHE and will provide worth
insight for further investigations to incorporate more physical e¤ects.
140

Chapter 9
Flow of Oldroyd 8-Constant Fluid in a Scraped
Surface Heat Exchanger
In this Chapter �ow of the Oldroyd 8-constant �uid model in a scraped surface heat exchanger
(SSHE) is studied. Steady incompressible isothermal �ow of the �uid around a periodic arrange-
ment of pivoted scraper blades in channel for generalized Couette �ow is studied and �ow is
modeled using LAT as in SSHE the gaps between the blades and the device walls are narrow.
Using these approximations the problem is transformed into nonlinear boundary value problem
which is solved using Adomian decomposition method. Expression for velocity pro�les for dif-
ferent region, �ow rates, stream function are obtained. Graphical and tabular representation
for velocity pro�le and for di¤erent �ow parameter involved is also incorporated.
9.1 Problem Formulation
Steady incompressible, isothermal �ow of an Oldroyd 8-constant �uid in a channel of width H
when there is a periodic array of thin plane blades is considered. The wall at y = 0 is moving
with stream velocity U , the other wall at y = H is stationary.
The extra stress tensor S for the Oldroyd 8-constant �uid model [43], [44] is de�ned as
141

S+�1rS+
1
2(�1 � �1) (A1S+ SA1) +
1
2�0 (tr (S))A1 +
1
2�1 (tr (SA1)) I
= �0
�A1 + �2
rA1 + (�2 � �2)A21 +
1
2�2�tr�A21��I
�; (9.1)
In Eq. (9:1) �0; �1 and �2 are zero shear viscosity and relaxation and retardation time, respec-
tively, while �0; �1; �2; �1; and �2 are constants. The upper contravariant convected derivative
r is de�ned as
r(�) = D (�)
Dt� f(rV)T (�) + (�) (rV)g: (9.2)
Using the velocity �eld de�ned in Eq. (2:7) and LAT, the component of extra stress tensor
S take the form
tr (S) = Sxx + Syy + Szz (9.3)
tr (S) =
266640 (Sxx + Syy + Szz)
@uk@y 0
(Sxx + Syy + Szz)@uk@y 0 0
0 0 0
37775 (9.4)
SA1 =
26664Sxy
@uk@y Sxx
@uk@y 0
Syy@uk@y Syx
@uk@y 0
Szx@uk@y Szy
@uk@y 0
37775 (9.5)
tr (SA1) = 2Syx@uk@y
(9.6)
tr (SA1) I =
266642Syx
@uk@y 0 0
0 2Syx@uk@y 0
0 0 2Syx@uk@y
37775 (9.7)
142

rA1 = �
266642@uk@y 0 0
0 2@uk@y 0
0 0 0
37775 (9.8)
(V:r)A1 = 0 (9.9)
tr�A21�I =
266664�@uk@y
�20 0
0�@uk@y
�20
0 0�@uk@y
�2377775 (9.10)
Using Eqs. (9:3� 9:11) in Eq. (9:1) to get,
Sxx = �0 (�2 � �2 � �2)�@uk@y
�2� (�1 � �1 � �1)Sxy
@uk@y
; (9.11)
Sxy = Syx = �0
2641 + ��@uk@y
�21 + �
�@uk@y
�2375 @uk@y
; (9.12)
Sxz = Szx =1
2(�1 + �1)Syz
�@uk@y
�;
Syy = �0 (�2 + �2 � �2)�@uk@y
�2� (�1 + �1 � �1)Sxy
@uk@y
;
Syz = Szy = �0
2641 + ��@uk@y
�21 + �
�@uk@y
�2375 @uk@y
;
Szz = �0�2
�@uk@y
�2� �1Sxy
@uk@y
;
where
143

� = �1�2 + �1 (�2 � �2) + �0��2 �
3
2�2
�;
� = �21 + �1 (�1 � �1) + �0��1 �
3
2�1
�;
which are the dilatant constant and the pseduplastic constant respectively.
Similarly, equations of motion become
�@pk@x
+@
@y
264�08><>:1 + �
�@uk@y
�21 + �
�@uk@y
�29>=>; @uk
@y
375 = 0; k = 1; 2; 3;0 = �@pk
@y+dSyydy
: (9.13)
Introducing modi�ed pressure epk = pk � Syy;
then equations of motion become
@epk@x
=@
@y
264�08><>:1 + �
�@uk@y
�21 + �
�@uk@y
�29>=>; @uk
@y
375 ; k = 1; 2; 3; (9.14)
0 =@epk@y
; k = 1; 2; 3: (9.15)
Eq. (9.15) implies that epk 6= epk(y), therefore, Eq. (9:14) yielddepkdx
=@
@y
264�08><>:1 + �
�@uk@y
�21 + �
�@uk@y
�29>=>; @uk
@y
375 ; k = 1; 2; 3: (9.16)
The associated boundary conditions are given in Eqs. (2:11)� (2:13). Using dimensionless
parameters de�ned in Eq. (2:14) and setting
144

� = �h2pU2
; � = �h2pU2
;
then equations of motion (9:16) after ignoring the bar sign for convenience, become
depkdx
=@
@y
2641 + ��@uk@y
�21 + �
�@uk@y
�2 @uk@y375 ; ; k = 1; 2; 3; (9.17)
and the respective boundary conditions in nondimensional form are given in Eqs. (2:16)�
(2:18) :
9.2 Solution of the Problem
Integrating Eq. (9:17) with respect to y to obtain
2641 + ��@uk@y
�21 + �
�@uk@y
�2375 @uk@y
=
�dpkdx
y + c1
�; k = 1; 2; 3: (9.18)
The Eq. (9.18) is nonlinear PDE, and its analytic solution is impossible, so ADM [46] will
be employed to solve Eq. (9.18) subject to boundary conditions (2:16)� (2:18). Re-writing the
Eq. (9.18) in the form
Ly(uk) =
�dpkdx
y + c1
�+ �
�dpkdx
y + c1
��@uk@y
�2� � @uk
@y
�@uk@y
�2; k = 1; 2; 3; (9.19)
where Ly = @@y is di¤erential operator assumed to be invertible and its inverse is de�ned by
L�1y =
Z(�)@y:
Applying L�1y on both sides of Eq. (9:19 to get
uk = c2 + L�1y
"�dpkdx
y + c1
�+ �
�dpkdx
y + c1
��@uk@y
�2� � @uk
@y
�@uk@y
�2#; k = 1; 2; 3; (9.20)
145

where c1 and c2 are arbitrary function of x. In term of ADM, uk and c1 can be written in
component form as
uk =1Xn=0
ukn; c1 =1Xn=0
c1n; k = 1; 2; 3: (9.21)
Thus, Eq. (9.20) takes the form
1Xn=0
ukn = c2 +
�dpkdx
y2
2+ c1y
�+ L�1y
"�
�dpkdx
y + c1
��@uk@y
�2� � @uk
@y
�@uk@y
�2#; k = 1; 2; 3:
(9.22)
Adomian also suggested that the nonlinear terms can be expanded in the form of Adomian
polynomial, say An and is given by
An =
"�
�dpkdx
y + c1
��@uk@y
�2� � @uk
@y
�@uk@y
�2#; k = 1; 2; 3: (9.23)
Thus, Eq. (9.22) takes the form
1Xn=0
ukn = c2 +
�dpkdx
y2
2+ c1y
�+ L�1y [An] ; k = 1; 2; 3: (9.24)
From recursive relation (9.24) the zeroth order problem is given by
uk0 = c2 +
�dpkdx
y2
2+ c1y
�; k = 1; 2; 3: (9.25)
with boundary conditions given in Eq. (4:15) :
The remaining order problems are in the following form:
ukn = L�1y (An�1) ; n � 1; k = 1; 2; 3; (9.26)
subject to the boundary conditions (4:17)
9.2.1 Zeroth Order Solutions
Solving Eq. (9.25) subject to the boundary conditions (4.15) to yield
146

u10 = �(h� y)(�2 + hp1xy)
2h; (9.27)
u20 =1
2p2x(h� y)(H � y); (9.28)
u30 = �(H � y)(�2 +Hp3xy)
2H: (9.29)
9.2.2 First Order Solutions
For n = 1; Eq. (9.26) and (9.23) yields
uk1 = L�1y (A0) ; k = 1; 2; 3; (9.30)
where
A0 =
"�
�dpkdx
y + c10
��@uk0@y
�2� � @uk0
@y
�@uk0@y
�2#; k = 1; 2; 3: (9.31)
Thus, using the zeroth order solutions (9.27) -(9.29) the Eq. (9:30) subject to the boundary
conditions (4.23) yields
u11 = �1y +�2y2 +�3y
3 +�4y4; (9.32)
u21 = d2 +1y +2y2 +3y
3 +4y4; (9.33)
u31 = 1y +2y2 +3y
3 +4y4: (9.34)
9.2.3 Second Order Solutions
For n = 2; Eq. (9.26) yields
uk2 = L�1y (A1) ; k = 1; 2; 3; (9.35)
147

where
A1 =
"�
�dpkdx
y + c11
��@uk1@y
�2� � @uk1
@y
�@uk1@y
�2#; k = 1; 2; 3: (9.36)
Thus, using �rst order solutions (9.32)-(9.34) in Eq. (9.35) along with the boundary condi-
tions (4.29) to obtain
u12 = y6�10 + y7�11+ y
8�12� 16y9��3�42�32
5y10��4
3+ y�5+ y2�6+ y
3�7+ y4�8+ y
5�9;
(9.37)
u22 = d4+y610+y711+y812�16y9�342�32
5y10�4
3+y5+y26+y
37+y48+y
59;
(9.38)
u31 = y610+y711+y
812�16y9�342�32
5y10�4
3+y5+y26+y
37+y48+y
59: (9.39)
9.2.4 Velocity Pro�le
Using zeroth, �rst and second orders solutions in Eq. (9.21) to get the following results:
u1 = �(h� y)(�2 + hp1xy)2h
+ y�1 + y6�10 + y
7�11 + y8�12 + y
2�2 + y3�3 + y
4�4
�16y9��3�24 �32
5y10��34 + y�5 + y
2�6 + y3�7 + y
4�8 + y5�9; (9.40)
u2 =1
2p2x(h� y)(H � y) + y1 + y610 + y711 + y812 + y22 + y33 + y44 �
16y9�324 �
32
5y10�4
3 + y5 + y26 + y
37 + y48 + y
59 + d2 + d4; (9.41)
and
148

u3 = �(H � y)(�2 +Hp3xy)2H
+ y1 + y610 + y
711 + y812 + y
22 + y33 + y
44
�16y9�324 �32
5y10�34 + y5 + y
26 + y37 + y
48 + y59; (9.42)
where �1;�2; :::;�12, 1;2; :::;12 and 1;2; :::;12 are variables terms used to simplify
above velocity expressions (9:40)� (9:42), their values are given in Appendix G:
The volume �ow rate in three stations using Eqs. (2:22) ; (2:24) and (2:26) are
Q1 =h
2� h3p1x
12+h2�12
+h7�107
+h8�118
+h9�129
+h3�23
+h4�34
+h5�45
�85h10��3�
24 �
32
55h11��34 +
h2�52
+h3�63
+h4�74
+h5�85
+h6�96
; (9.43)
Q2 = �d2h� d4h+ d2H + d4H +h3p2x12
� 14h2Hp2x +
1
4hH2p2x �
H3p2x12
�h212
+H212
� h7107
+H7107
� h8118
+H8118
� h9129
+
H9129
� h323
+H323
� h434
+H434
� h545
+H545
+8
5h10�3
24
�85H10�3
24 +
32
55h11�34 �
32
55H11�34 �
h252
+H252
� h363
+H363
� h474
+H474
� h585
+H585
� h696
+H696
; (9.44)
and
Q3 =H
2� H3p3x
12+H212
+H7107
+H8118
+H9129
+H323
+H434
+H545
�
8
5H10�3
24 �
32
55H11�34 +
H252
+H363
+H474
+H585
+H696
: (9.45)
The stream function 1; 2; and 3 satisfying Eqs. (2:34)� (2:35) are
149

1 = y +y7�107
+y8�118
+y9�129
� 3255y11��4 �
8
5y10��3�4
2 �
y2�2 + h2p1x � 2h(�1 +�5)
�4h
+1
6y3(p1x + 2(�2 +�6)) +
1
4y4(�3 +�7) +
1
5y5(�4 +�8) +
y6�96
; (9.46)
2 =h3p2x12
� 14h2Hp2x +Q1 +
1
2hHp2xy �
1
4hp2xy
2 � 14Hp2xy
2 +p2xy
3
6+
d2(�h+ y) + d4(�h+ y)�h212
+y212
� h7107
+y7107
� h8118
+y8118
� h9129
+y9129
� h323
+y323
� h434
+y434
� h545
+8
5h10�34
2 � 85y10�34
2 +32
55h11�4
3 � 3255y11�4
3 � h252
+y252
� h363
+y363
� h474
+y474
� h585
+y585
+1
6
��h6 + y6
�9; (9.47)
3 = y +y7107
+y8118
+y9129
� 85y10�3
24 �
32
55y11�34 �
y2�2 +H2p3x � 2H(1 +5)
�4H
+1
6y3(p3x + 2(2 +6)) +
1
4y4(3 +7) +
1
5y5(4 +8) +
y696
: (9.48)
9.3 Graphs and Discussion
The steady isothermal incompressible �ow of the Oldroyd 8-Constant �uid model in a SSHE
is studied. Lubrication approximation theory is used to simplify the equations of motion as
for the �ows inside SSHE values of Reynolds number and aspect ratios are assumed to be
small. Analytical expressions for physical quantities such as velocity �eld, �ow rates and stream
function are obtained. In this section the impact of various �ow parameters on the velocity
pro�le, stream function and on the volume �ow rates is discussed. Tables 9.1, 9.2 and 9.3 show
velocity distribution in di¤erent stations of SSHE. It is observed that velocities decrease in all
regions. Moreover, for increasing value of shear thickening parameter velocities decrease more
150

With p1x = �1; xp = 0:49; �1 = 1:25322; x = 1:y � = 0, � = 1 � = 0:1; � = 1 � = 1; � = 0:10:0 1:00000 1:00000 1:000000:1 1:01937 1:01901 1:013070:2 1:02583 1:02541 1:018570:3 1:02202 1:02159 1:014300:4 1:00990 1:00927 0:998570:5 0:99089 0:98973 0:970270:6 0:96590 0:96375 0:928920:7 0:93513 0:93149 0:874540:8 0:89799 0:89244 0:807700:9 0:85312 0:84537 0:729291:0 0:79841 0:78846 0:640551:1 0:73125 0:71943 0:543201:2 0:64870 0:63566 0:439591:3 0:54753 0:53418 0:333031:4 0:42393 0:41153 0:227801:5 0:27274 0:26304 0:128221:6 0:08573 0:08192 0:035625
Table 9.1: Velocity distribution in region 1 of SSHE.
rapidly. Table 9.4 shows �ow rate distribution inside SSHE. It is observed that values of �ow
rate increase with the increase in the values of �.
Figure 9.1 re�ects the impact of � on velocity pro�le in three regions of SSHE. It is observed
that velocities in region 1 region 2 and region 3 decreases with increase in � indicating shear
thickening behaviour which is important physical phenomena that foodstu¤ possesses. Figure
9.2 shows impact of non-Newtonian parameter � on velocity pro�le in three regions of SSHE.
It is noted that velocity increases in each region with an increase in non-Newtonian parameter
indicating shear thinning behaviour which is also very crucial characteristic of foodstu¤. Figures
9.3 and 9.4 show stream line plots which indicates velocity distribution inside SSHE for di¤erent
inclination of the blade pivot. Figures 9.5 and 9.6 show �ow rate as a function of xp: It is
observed that value of �ow rate decreases with increasing value of non-Newtonian parameter �
whereas �ow rate increases with increasing value of non-Newtonian parameter �.
151

with H = 3; p2x = �1; xp = 0:49; �1 = 1:25322; x = 1:y � = 0, � = 1 � = 0:1, � = 1 � = 1, � = 0:1
1:63914 �6.82� 10-13 5.68� 10-14 �5.45� 10�121:73914 0:092389 0:088959 0:0419201:83914 0:161744 0:156543 0:0817821:93914 0:213169 0:207099 0:1176192:03914 0:249953 0:243503 0:1473492:13914 0:274281 0:267703 0:1692392:23914 0:287579 0:280975 0:1820532:33914 0:290632 0:284027 0:1850872:43914 0:283624 0:277024 0:1781762:53914 0:266136 0:259589 0:1616952:63914 0:23714 0:230798 0:1365602:73914 0:194936 0:189130 0:1042092:83914 0:136964 0:132317 0:0665392:93914 0:059336 0:056992 0:025671
Table 9.2: Velocity distribution in region 2 of SSHE.
With H = 3; p3x = �1; xp = 0:49; �1 = 1:25322; x = 1:y � = 0, � = 1 � = 0:1, � = 1 � = 1, � = 0:10:0 1:00000 1:00000 1:000000:2 3:26806 2:71831 2:936560:4 4:20928 3:49181 3:368490:6 4:60534 3:84273 3:46380:8 4:77976 4:00635 3:512581:0 4:85251 4:07697 3:550451:2 4:86747 4:09176 3:562341:4 4:84394 4:06792 3:532891:6 4:79019 4:01285 3:454881:8 4:70451 3:92503 3:329742:0 4:57594 3:79464 3:16682:2 4:38429 3:60351 2:984362:4 4:08588 3:31364 2:807582:6 3:55881 2:8273 2:619392:8 2:46826 1:9006 2:123943:0 �4.5� 10-13 �1.1� 10-13 1.09� 10-11
Table 9.3: Velocity distribution in region 3 of SSHE.
152

Figure 9.1: Impact of � on velocity pro�le in three regions by �xing H = 3; l = 1; xp = 0:49;�1 = 1:25322; x = 1; � = 1:
153

Figure 9.2: Impact of � on velocity pro�le in three regions by �xing H = 3; l = 1; xp = 0:49;�1 = 1:25322; x = 1; � = 1:
Figure 9.3: Stream lines patterns in di¤erent regions of SSHE with H = 3; xp = 0:595; �1 =1:25322; � = 0:1; � = 1; p1x = p2x = p3x = �1:
154

with H = 1:4; ; xp = 0:49; �1 = 1:25322; x = 1;p1x = p2x = p3x = �1:
� Q1 Q2 Q30:1 0:736641 0:0006267 0:9180750:2 0:743840 0:0006273 0:9251330:3 0:751057 0:0006276 0:9322070:4 0:758319 0:0006280 0:9393220:5 0:765655 0:0006284 0:9465030:6 0:773092 0:0006287 0:9537770:7 0:780661 0:0006291 0:9611700:8 0:788389 0:0006294 0:9687060:9 0:796304 0:0006298 0:9764121:0 0:804435 0:0006302 0:9843131:1 0:812811 0:0006305 0:9924361:2 0:821459 0:0006309 1:0008101:3 0:830408 0:0006312 1:0094501:4 0:839687 0:0006316 1:0183901:5 0:849323 0:0006320 1:027660
Table 9.4: Flow rate distribution in di¤erent regions of SSHE.
Figure 9.4: Stream lines patterns in di¤erent regions of SSHE with H = 3; xp = 0:595; �1 =�1:48967; � = 0:1; � = 1; p1x = p2x = p3x = �1:
155

Figure 9.5: Plot of �uxes Q1, Q2 and Q3 depending on xp with H = 3; � = 1 by varying� = 0:1; 0:2; 0:3; 0:4; 0:5; 0:6:
156

Figure 9.6: Plot of �uxes Q1; Q2 and Q3 for di¤erent values H = 3; � = 1; p1x = p2x = p3x =�0:5; and varrying � = 0:1; 0:2; 0:3; 0:4; 0:5; 0:6:
157

9.4 Conclusion
Foodstu¤s normally has non-Newtonian properties in nature having shear thinning, shear thick-
ening and viscoplastic or viscoelastic behaviour. The Oldroyd 8-constant �uid model has the
ability to behave as shear thinning and shear thickening �uid so it would be more practical
to study �ow inside SSHE by taking this �uid model. So, steady incompressible �ow of the
Oldroyd 8-constant �uid inside SSHE is modelled assuming the Reynolds number and aspect
ratio to be very small so that LAT is applicable. Solutions for Oldroyd 8-constant �uid around
a periodic arrangement of pivoted scraper blade in the channel considering generalized Couette
�ow are found using ADM. Various important physical properties inside SSHE are investigated
and examined for the impact of di¤erent �ow indicators via Tables and graphical representation.
This work will be bene�cial in quantitative understanding of some basic features considering
non-Newtonian nature of foodstu¤ within a SSHE and will provide worth insight for further
investigations to incorporate more physical e¤ects.
158

Appendix A
Constant involved in solutions presented in Chapter 2.
The Qk (k = 1, 2, 3) obtained from (2.39) and (2.45)-(2:47) take the forms
Q1 = � 1
12M�1
�6(2H � h0 � h1)� + (H � h0)2(H � h1)2lM3cosh
HM
2
�sech
HM
2�h0h1M
��12 + h0h1M2
�cosh
HM
2+ 12(h0 + h1)sinh
HM
2
��h0h1M
��12 + h0h1M2
�cosh
HM
2+ 12(h0 + h1)sinh
HM
2
�+tanhHM2
M;
Q2 =(H � h0)2(H � h1)2
12�1lM2
�h0h1M
��12 + h0h1M2
�cosh
HM
2+ 12(h0 + h1)sinh
HM
2
�;
Q3 =1
2�1h0h1(�2H + h0 + h1)
��12 + h0h1M2
��+ 2H
�H3(h0 + h1)� 2H2(h0 + h1)
2�
2h0h1�h02 + h0h1 + h1
2�+H(h0 + h1)
�h02 + 4h0h1 + h1
2��lM2sinh
HM
2;
�1 =�6(2H � h0 � h1)(h0 + h1)� +H
�H3(h0 + h1)� 2H2(h0 + h1)
2
�2h0h1�h02 + h0h1 + h1
2�+H(h0 + h1)
�h02 + 4h0h1 + h1
2��lM3cosh
�HM2
��;
� = HMcosh�HM2
�� 2sinh
�HM2
�:
159

Appendix B
Constant and variable terms involved in solutions presented in Chapter 3.
A1 =�1�
p1 + 4Re�
2�;
A2 =�1 +
p1 + 4Re�
2�;
c1 =(�A1 +A2)hp1x + eA2h(�p1x +A1Re) + eA1h(p1x �A2Re)
(A2 �A2eA1h +A1 (�1 + eA2h))Re;
c2 =
��1 + eA2h �A2h
�p1x +A2Re
(A2 �A2eA1h +A1 (�1 + eA2h))Re;
c3 =
��1 + eA1h �A1h
�p1x +A1Re
(A1 �A1eA2h +A2 (�1 + eA1h))Re;
c4 =
�eA1h+A2H(1�A1h) + eA2h+A1H(�1 +A2h) + (A1 �A2)e(A1+A2)hH
�p2x�
A1eA1h (eA2h � eA2H) +A2��e(A1+A2)h + eA2h+A1H
��Re
;
c5 = ��eA2H + eA2h(�1 +A2(h�H))
�p2x�
A1eA1h (eA2h � eA2H) +A2��e(A1+A2)h + eA2h+A1H
��Re;
c6 =
�eA1H + eA1h(�1 +A1(h�H))
�p2x�
A1eA1h (eA2h � eA2H) +A2��e(A1+A2)h + eA2h+A1H
��Re;
c7 =(�A1 +A2)Hp3x + eA2H(�p3x +A1Re) + eA1H(p3x �A2Re)
(A2 �A2eA1H +A1 (�1 + eA2H))Re;
c8 =
��1 + eA2H �A2H
�p3x +A2Re
(A2 �A2eA1H +A1 (�1 + eA2H))Re;
c9 =
��1 + eA1H �A1H
�p3x +A1Re
(A1 �A1eA2H +A2 (�1 + eA1H))Re;
A3 =eA1H � eA2H + (�A1 +A2)H
(A2 �A2eA1H +A1 (�1 + eA2H))Re;
A4 =
�eA1H � eA2H
� �A2
2��1 + eA1H
��A1A22H +A1
2�1� eA2H +A2H
��(A2 �A2eA1H +A1 (�1 + eA2H))2Re
;
A5 =�1 + eA2H �A2H
(A2 �A2eA1H +A1 (�1 + eA2H))Re;
A6 = ���1 + eA2H
� ��A22
��1 + eA1H
�+A1A2
2H +A12��1 + eA2H �A2H
��(A2 �A2eA1H +A1 (�1 + eA2H))2Re
;
160

A7 =1� eA1H +A1H
(A2 �A2eA1H +A1 (�1 + eA2H))Re;
A8 = ���1 + eA1H
� �A2
2��1 + eA1H
��A1A22H +A1
2�1� eA2H +A2H
��(A2 �A2eA1H +A1 (�1 + eA2H))2Re
;
A9 =2A1A2Re
2A2A5 (�1 + eA1H)Re+A1 (2A7 (�1 + eA2H)Re�A2H(H � 2A3Re));
A10 =4A1A2
��A2A6
��1 + eA1H
�+A1
�A8 �A8eA2H +A2(A3 +A5 +A7 �A4H)
��Re2
(�2A2A5 (�1 + eA1H)Re+A1 (�2A7 (�1 + eA2H)Re+A2H(H � 2A3Re)))2
A11 =A2
2��1 + eA1H
��A1A22eA1HH +A1
2�1 + eA2H(�1 +A2H)
�A1A2 (A2 �A2eA1H +A1 (�1 + eA2H))
;
A12 =
�2A2
��1 + eA1H
� �1� eA2H +A2H
�+A1
2H�2 +A2H + eA2H(�2 +A2H)
�2A1A2 (A2 �A2eA1H +A1 (�1 + eA2H))Re
�A1��2� 2e(A1+A2)H +A22H2 + eA2H(2� 2A2H) + eA1H
�2 + 2A2H +A2
2H2��i
:
161

Appendix C
Constant and variable terms involved in solutions presented in Chapter 4.
1 = �1h� hp1x
2;
2 =� 1
4
2p1x;
3 =1
2��h3p1x
3 + 4h2p1x2 1 + 6hp1x 1
2 + 4 13�;
4 = �2hp1x��h4p1
4� + 6h3p1x3� 1 + 15h
2p1x2� 1
2 + 15� 14 + hp1x
�20� 1
3 � 3�� 3 1 3
�;
�1 = �12(h+H)p2x,
�2 =1
32(h�H)4p32x�;
�3 = �
��hp2x � 1
2(h+H)p2x�4 � �Hp2x � 1
2(h+H)p2x�4�
�
2(�h+H)p2,
�4 =1
8hH
�3h4 + 10h2H2 + 3H4
�p52x�
2;
�5 = �38(h+H)5p52x�
2;
�1 = � 1H� Hp3x
2;
�2 =
�2 +H2p3x
�4�
32H4p3;
�3 = ��4 +H4p3x
2��
2H3;
�4 = �2hp3x��h4p3x
4� + 6h3p3x3��1 + 15h
2p3x2��1
2 + 15��14 + hp3x
�20��1
3 � �3�� 3�1�3
�:
162

Appendix D
Constant and variable terms involved in solutions presented in chapter 5.
1 =1
h� hp1x
2;
2 = 11+n�
p1x + np1x;
3 =
�� 11+n + hp1x(hp1x + 1)n + 1(hp1x + 1)n
��
h(1 + n)p1x;
4 = � 1n (hp1x ((1 + n) 1
n � 2(hp1x + 1)n) + 2 1 ( 1n � (hp1x + 1)n))�2
2h(1 + n)p1x2;
5 =( 1
n � (hp1x + 1)n) (2 1 ( 1n � (hp1x + 1)n) + hp1x2h2(1 + n)p1x2
(1 + n) 1n + (�1 + n)(hp1x + 1)n)�2;
6 = � 11+n�
��2 1 � 4n 1 � 4 3 � 10n 3 � 4n2 3 + 2 1n� + 3n 1n� + n2 1n�
�2 (2 + 7n+ 7n2 + 2n3) p1x2
;
�1 = �12(h+H)p2x;
�2 = �2�1�n (H((h�H)p2x)n + h((�h+H)p2x)n)�
1 + n;
�3 =2�1�n (((h�H)p2x)n + ((�h+H)p2x)n)�
1 + n:
�4 =2�1�2n
�Hn((h�H)p2x)2n �H
��(h�H)2p2x2
�n+
(h�H)(1 + n)p2xh��n((�h+H)p2x)2n +
��(h�H)2p2x2
�n���2;
�5 = �2�1�2nn
�((h�H)p2x)2n � ((�h+H)p2x)2n
��2
(h�H)(1 + n)p2x;
�6 = Q1 �1
12h(h(�3hp2 + 6Hp2) + 12(�2 + �4) + h(2hp2 � 3Hp2 + 6(�3 + �5)))
+(�hp2 + �1)1+n(�hp2 + �1 + (2 + n)�3)�
(1 + n)(2 + n)p22� (�hp2 + �1)
1+2n�2
2(1 + 2n)p22;
163

�1 = � 1H� Hp3x
2;
�2 =
�� 1H �
Hp3x2
�1+n�
(1 + n)p3x;
�3 = �
���� 1H �
Hp3x2
�1+n+�� 1H +
Hp3x2
�1+n��
H(1 + n)p3x:
�4 =
�� 1H �
Hp3x2
�n ��� 1H +
Hp3x2
�n ��2 +H2p3x
�+�� 1H �
Hp3x2
�n �2�H2np3x
���2
2H2(1 + n)p3x2;
�5 =
��2��� 1H �
Hp3x2
�n��� 1H +
Hp3x2
�n�2+H2np3x
2H3(1 + n)p3x2 �� 1H� Hp3x
2
�2n��� 1H+Hp3x2
�2n!!�2;
�6 = ���1
1+n��2�1�2 � 4n�1�2 + 2��1n�2 + 3n��1n�2 + n2��1n�2�
2 (2 + 7n+ 7n2 + 2n3) p3x2
4�3 � 10n�3 � 4n2�3�:
164

Appendix E
Constant and variable terms involved in solutions presented in Chapter 6.
1 = Arccoshp1x� + p1x� cosh
hp1x� �
r�2 2
�p1x2 � 2�2 2 + 2�2 2coshhp1x�
�sinhhp1x�
2
2�2 2��1 + coshhp1x�
� ;
2 =
p1x� � p1x� coshhp1x� +
r�2 2
�p1x2 � 2�2 2 + 2�2 2coshhp1x�
�sinhhp1x�
2
2p1x� � 2p1x� coshhp1x�;
�1 = Arcsech
2664� 2
r�sinh
h(h�H)p2x
2�
i2r��sinhhp2x� � sinhHp2x�
�23775 ;
�2 =� sinh
h(h�H)p2x
�
i �sinh
hhp2x�
i� sinh
hHp2x�
i�p2x
r2� 2cosh
h(h�H)p2x
�
ir��sinh
hhp2x�
i� sinh
hHp2x�
i�2 ;
�1 = Arccoshp3x � p3xcoshHp3x� �
r�p3x2 � 2�2 2 + 2�2 2coshHp3x�
�sinh
hHp3x�
i22�
��1 + coshHp3x�
� ;
�2 =p3x � p3xcoshHp3x� +
r�p3x2 � 2�2 2 + 2�2 2coshHp3x�
�sinh
hHp3x�
i22p3x � 2p3xcoshHp3x�
:
165

Appendix F
Constant and variable terms involved in solutions presented in Chapter 8.
�1 =�2 + h2p1x
�2;
�2 =1
2p1x�2 + h2p1x
� �2 + h2p1x � 4h�4
�;
�3 =4
3hp1x
2�2 + h2p1x � h�4
�;
�4 = �h�12p1x � 4h2p1x2 + h4p1x3
�2 (12 + h4p1x2)
;
�5 =
hp1x
24 h2��70
�6h8p1x
6 + 8h4p1x3�2 + 3�2
2�+ 72h
�10h4p1x
3 + 7�2��3
�315h2�32�� 7h�1
�48h4p1x
3 + 40�2 � 45h�3��4 � 105�12�42
3524 8h2 �60h8p1x6 + 84h4p1x3�2 + 35�22�� 210h3 �4h4p1x3 + 3�2��3+
378h4�32 + 420h�1
�h4p1x
3 + �2 � h�3��4 + 210�1
2�42
35 ;
�6 =��3p1x
4Wi6�314h2
+1
7p1x
6Wi6�5
�;
�7 =�p1x
4Wi6�26h2
+3p1xWi6�3
2
32h4� p1x
3Wi6�3�54h2
�;
�8 =��3p1xWi6�2�3
20h4+p1x
4Wi6�1�410h2
+p1x
3Wi6�2�55h2
+9Wi6�3
2�580h4
��8;
�9 =�p1x
3Wi2
4+p1xWi6�2
2
16h4� 3p1xWi6�1�3�4
32h4� 3Wi6�2�3�5
16h4+p1x
3Wi6�1�4�58h2
�;
�10 =
p1x2+p1xWi6�1
2�42
32h4+p1x�2 + h2p1x
�Wi2
�2 + h2p1x � 4h�4
�8h2
+Wi6�1�2�4�5
8h4
!;
�11 =
p1xWi6�1�2�4
12h4�p1x
2Wi2�2 + h2p1x � h�4
�3h
+Wi6�2
2�512h4
� Wi6�1�3�4�58h4
!;
�12 =
�1h� hp1x
2+
�2 + h2p1x
�2Wi2�4
4h2+Wi6�1
2�42�5
16h4
!;
166

�1 = (h+H)(hp2x +Hp2x � 4�4);
�2 = (hp2x +Hp2x � �4);
�3 = (h+H)2;
�4 = �12(h+H)p2x;
�5 =1
8
�h3Hp2x
3Wi2 + hH3p2x3Wi2
�;
�6 = �840h8p72xWi6 � 560h6p62xWi6�1 � 105h4p52xWi6�21 + 1920h7p62xWi6�2;
�7 = �1120h6p2x5Wi6�22 � 672h5p2x6Wi6�3�4 � 280h3p2x5Wi6�1�3�4 + h
5p2x5Wi6�1�2672,
�8 = �210h2p2x5Wi6�32�4
2 + h4p2x5Wi6�2�3�4840,
�9 = 4hp42xWi6�240h6p2x
2 + 168h4p2x�1 + 35h2�1
2 � 560h5p2x�2 � 210h3�1�2+
336h4�22 + 210h3p2x�3�4 + 105h�1�3�4 � 280h2�2�3�4 + 105�23�24
�;
�10 =��840H8p2x
7Wi6 � 560H6p2x6Wi6�1 � 105H4p2x
5Wi6�12 + 1920H7p2x
6Wi6�2
+672H5p2x5Wi6�1�2 � 1120H6p2x
5Wi6�22;
�11 =
�672H5p2x
6Wi6�3�4 � 280H3p2x5Wi6�1�3�4 + 840H
4p2x5Wi6�2�3�4�
210H2p2x5Wi6�3
2�42� ;
�12 = 4Hp2x4Wi6
�240H6p2x
2 + 168H4p2x�1 + 35H2�1
2 � 560H5p2x�2 � 210H3�1�2
+336H4�22 + 210H3p2x�3�4 + 105H�1�3�4 � 280H2�2�3�4 + 105�3
2�42�;
�13 = ���10 + �11 + �6 + �7 + �8�12 � �9
;
�14 = ���12�6 � �12�7 � �12�8 + �10�9 � �11�96720(�12 � �9)
;
�15 = (p2x�1 + 2�2(�2�13 + �2));
�16 =�p2x�1(�13 � �2) + 2�13�22 + p2x2�3�4
�;
�17 =
��hp2x
2� Hp2x
2+1
4(h+H)2p2x
2Wi2�4 +1
16p2x
4Wi6�13�32�4
2
�;
�18 =p2x2+1
8(h+H)p2x
2Wi2(hp2x +Hp2x � 4�4) +1
32p2x
4Wi6�3�4(2�1�13 + p2x�3�4);
�19 =
�p2x
3Wi2
4+1
64p2x
4Wi6��8�1�13�2 + p2x
��12 + 8(�13 � �2)�3�4
���;
�20 =
��13p2x
2Wi2(hp2x +Hp2x � �4) +1
48p2x
4Wi6�2p2x�1�3�4 + �13
��12 � 8�2�3�4
���;
167

�1 =�2 +H2p3x
�2;
�2 =1
2p3x�2 +H2p3x
� �2 +H2p3x � 4H�4
�;
�3 =4
3Hp3x
2�2 +H2p3x �H�4
�;
�4 = �H�12p3x � 4H2p3x
2 +H4p3x3�
2 (12 +H4p3x2);
�5 =
Hp3x
24 H2��70
�6H8p3x
6 + 8H4p3x3�2 + 3�2
2�+ 72H
�10H4p3x
3 + 7�2��3 � 315H2�3
2�
�7H�1�48H4p3x
3 + 40�2 � 45H�3��4 � 105�12�42
3524 8H2
�60H8p3x
6 + 84H4p3x3�2 + 35�2
2�� 210H3
�4H4p3x
3 + 3�2��3 + 378H
4�32+
420H�1�H4p3x
3 +�2 �H�3��4 + 210�1
2�42
35 ;
�6 =��3p3x
4Wi6�314H2
+1
7p3x
6Wi6�5
�;
�7 =�p3x
4Wi6�26H2
+3p3xWi6�3
2
32H4� p3x
3Wi6�3�54H2
�;
�8 =��3p3xWi6�2�3
20H4+p3x
4Wi6�1�410H2
+p3x
3Wi6�2�55H2
+9Wi6�3
2�580H4
��8;
�9 =�p3x
3Wi2
4+p3xWi6�2
2
16H4� 3p3xWi6�1�3�4
32H4� 3Wi6�2�3�5
16H4+p3x
3Wi6�1�4�58H2
�;
�10 =
p3x2+p3xWi6�1
2�42
32H4+p3x�2 +H2p3x
�Wi2
�2 +H2p3x � 4H�4
�8H2
+Wi6�1�2�4�5
8H4
!;
�11 =
p3xWi6�1�2�4
12H4�p3x
2Wi2�2 +H2p3x �H�4
�3H
+Wi6�2
2�512H4
� Wi6�1�3�4�58H4
!;
�12 =
� 1H� Hp3x
2+
�2 +H2p3x
�2Wi2�4
4H2+Wi6�1
2�42�5
16H4
!:
168

Appendix G
Constant and variable terms involved in solutions presented in Chapter 9.
�1 =p1x�48 + 32h2p1x + h
8p1x4�(� � �)
8h (12 + h4p1x2);
�2 = �3p1x
�16 + 32h2p1x + 8h
4p1x2 + h8p1x
4�(� � �)
8h2 (12 + h4p1x2);
�3 =p1x
2�16 + 12h2p1x + h
6p1x3�(� � �)
2h (12 + h4p1x2);
�4 = �14p1x
3(� � �);
�5 = �12(���1 + ��13);
�6 =1
2�1(p1x��1 � 6��1�2 + 4��13�2);
�7 =1
3
�4p1x��1�2 + 2��13
�2�2
2 + 3�1�3�� 3��1
�4�2
2 + 3�1�3��;
�8 = p1x�
��2
2 +3�1�32
�+ ��13(3�2�3 + 2�1�4)� �
�2�2
3 + 9�1�2�3 + 3�12�4
�;
�9 =1
5
�4p1x�(3�2�3 + 2�1�4) + ��13
�9�3
2 + 16�2�4�� 3��
12�22�3 + 9�1�3
2 + 16�1�2�4��;
�10 = 4��13�3�4 +1
6p1x�
�9�3
2 + 16�2�4�� �
�9�2�3
2 + 8�22�4 + 12�1�3�4
�;
�11 =1
7
�8��4(3p1x�3 + 2�13�4)� 3�
�9�3
3 + 48�2�3�4 + 16�1�42��;
�12 =1
2�4�4p1x��4 � 3�
�9�3
2 + 8�2�4��;
�13 =��14 ��15 +�16 ��17 + 8h6��22�4 � 1
2h8�4
��27��32 + 4p1x��4 � 24��2�4
��18
;
�14 =1
2h2p1x��1
2 � h��13 +4
3h3p1x��1�2 � 3h2��12�2 + h4p1x��22 � 4h3��1�22
�2h4��23;
�15 =3
2h4p1x��1�3 � 3h3��12�3 +
12
5h5p1x��2�3 � 9h4��1�2�3 �
36
5h5��2
2�3
+3
2h6p1x��3
2 � 275h5��1�3
2;
�16 = 9h6��2�32 � 27
7h7��3
3 +8
5h5p1x��1�4 � 3h4��12�4 +
8
3h6p1x��2�4 �
48
5h5��1�2�4 � 8h6��22�4;
169

�17 =24
7h7p1x��3�4 � 12h6��1�3�4 �
144
7h7��2�3�4 �
48
7h7��1�4
2 �
16h9��3�42 � 32
5h10��4
3;
�18 = h��12 + 2h2��1�2 +
4
3h3��2
2 + 2h3��1�3 + 3h4��2�3 +
9
5h5��3
2 + 2h4��1�4
+16
5h5��2�4 + 4h
6��3�4 +16
7h7��4
2;
1 =1
8(h+H)2p2x
2((h+H)p2x� + 2d1�);
d1 = �12(h+H)p2x;
d2 =1
8
��h3Hp2x3� � hH3p2x
3� + h3Hp2x3� + hH3p2x
3��;
2 =1
8(h+H)p2x
2(�3(h+H)p2x� � 4d1� + (h+H)p2x�);
3 =1
6p2x
2(3(h+H)p2x� + 2d1� � 2(h+H)p2x�);
4 =1
4p2x
3(�� + �);
5 = 12(d3� � �1);
6 =1
21(p2x�1 + 4d3�2 � 6�12);
7 =4
3p2x�12 � �1
�42
2 + 313�;
8 = p2x�
�2
2 +3132
�+ d3�(323 + 214)� �
�22
3 + 9123 + 3124
�;
9 =1
5
�4p2x�(323 + 214) + d3�
�93
2 + 1624�� 3��
12223 + 913
2 + 16124��;
10 = 4d3�34 +1
6p2x�
�93
2 + 1624�� �
�923
2 + 8224 + 12134
�;
11 =1
7
�8�4(3p2x3 + 2d34)� 3�
�93
3 + 48234 + 16142��;
12 =1
24�4p2x�4 � 3�
�93
2 + 824��;
13 = �12h2p2x�
21 + h�
31 �
4
3h3p2x�12 + 3h
2�212 � h4p2x�22;
14 = 4h3�122 + 2h
4�32 �3
2h4p2x�13 + 3h
3�213 �12
5h5p2x�23;
15 = 9h4�123 +36
5h5�223 �
3
2h6p2x�
23 +
27
5h5�1
23;
16 = 9h6�223 +
27
7h7�33 �
8
5h5p2x�14 + 3h
4�214 �8
3h6p2x�24;
170

17 =48
5h5�124 + 8h
6�224 �24
7h7p2x�34 + 12h
6�134 +144
7h7�234;
18 =48
7h7�1
24 + 16h
9�324 +
32
5h10�34;
19 =
�h�1
2 + 2h2�12 +43h3�2
2 + 2h3�13 + 3h4�23 +
95h5�3
2
+2h4�14 +165 h
5�24 + 4h6�34 +
167 h
7�42� ;
20 =
��h�1
2 + 2h2�12 +4
3h3�2
2 + 2h3�13 + 3h4�23 +
9
5h5�3
2+
16
5h5�24 + 4h
6�34 +16
7h7�4
2
��h�1
2 �H�12 + 2h2�12 � 2H2�12
2h4�14 +4
3h3�2
2 � 43H3�2
2 + 2h3�13 � 2H3�13 + 3h4�23�
3H4�23 +9
5h5�3
2 � 95H5�3
2 + 2h4�14 � 2H4�14 +16
5h5�24�
16
5H5�24 + 4h
6�34 � 4H6�34 +16
7h7�4
2 � 167H7�4
2
��d3 =
1
19
�13 +14 +15 +16 +17 +18 �
1
2h84
��27�32 + 4p2x�4 � 24�24
��+
1
20;
21 =
��H�12 � 2H2�12 � 4
3H3�2
2 � 2H3�13 � 3H4�23 � 95H
5�32�
2H4�14 � 165 H
5�24 � 4H6�34 � 167 H
7�42�;
22 =1
2h2p2x�
21 � h�31 +
4
3h3p2x�12 � 3h2�212 + h4p2x�22 � 4h3�122 � 2h4�32+
3
2h4p2x�13;
23 = 3h3�213 +
12
5h5p2x�23 � 9h4�123 �
36
5h5�223 +
3
2h6p2x�
23
� 275h5�1
23 � 9h6�223 �
27
7h7�33;
24 =8
5h5p2x�14 � 3h4�214 +
8
3h6p2x�24 �
48
5h5�124 � 8h6�224
+24
7h7p2x�34 � 12h6�134 �
144
7h7�234;
25 =48
7h7�1
24 � 16h9�324 �
32
5h10�34 +
1
2h84
��27�32 + 4p2x�4 � 24�24
�;
26 = h�21 + 2h2�12 +
4
3h3�22 + 2h
3�13 + 3h4�23 +
9
5h5�23 + 2h
4�14
+16
5h5�24 + 4h
6�34 +16
7h7�24;
171

27 =1
2H2p2x�
21 �H�31 +
4
3H3p2x�12 � 3H2�212 +H
4p2x�22 � 4H3�1
22
�2H4�32 +3
2H4p2x�13 � 3H3�213;
28 =12
5H5p2x�23 � 9H4�123 �
36
5H5�223 +
3
2H6p2x�
23 �
27
5H5�1
23
�9H6�223 �
27
7H7�33 +
8
5H5p2x�14
29 = 3H4�214 +8
3H6p2x�24 �
48
5H5�124 � 8H6�224 +
24
7H7p2x�34 �
12H6�134 �144
7H7�234;
30 =48
7H7�1
24 � 16H9�3
24 �
32
5H10�34 +
1
2H84
��27�32 + 4p2x�4 � 24�24
�31 = h�21 �H�21 + 2h2�12 � 2H2�12 +
4
3h3�22 �
4
3H3�22 + 2h
3�13 �
2H3�13 + 3h4�23;
32 = 3H4�23 +9
5h5�23 �
9
5H5�23 + 2h
4�14 � 2H4�14 +16
5h5�24 �
16
5H5�24 + 4h
6�34;
d4 =(21 � (22 �23 +24 �25)� (26) (27 +28 �29 �30))
(31 �32 � 4H6�34+167 h
7�42 � 16
7 H7�4
2� ;
1 =p3x�48 + 32H2p3x +H
8p3x4�(� � �)
8H (12 +H4p3x2);
2 = �3p3x
�16 + 32H2p3x + 8H
4p3x2 +H8p3x
4�(� � �)
8H2 (12 +H4p3x2);
3 =p3x
2�16 + 12H2p3x +H
6p3x3�(� � �)
2H (12 +H4p3x2);
4 = �14p3x
3(� � �);
5 = 21(��1 + �13);
6 =1
21(p3x�1 � 6�12 + 4�132);
7 =1
3
�4p3x�12 + 2�13
�22
2 + 313�� 3�1
�42
2 + 313��;
172

8 = p3x�
�2
2 +3132
�+ �13(323 + 214)� �
�22
3 + 9123 + 3124
�;
9 =1
5
�4p3x�(323 + 214) + �13
�93
2 + 1624��
3��122
23 + 9132 + 16124
��;
10 = 4�1334 +1
6p3x�
�93
2 + 1624�� �
�923
2 + 8224 + 12134
�;
11 =1
7
�8�4(3p3x3 + 2134)� 3�
�93
3 + 48234 + 16142��;
12 =1
24�4p3x�4 � 3�
�93
2 + 824��;
13 =�14 � 15 +16 � 17 + 8H6�2
24 � 12H
84��27�32 + 4p3x�4 � 24�24
�18
;
14 =1
2H2p3x�1
2 �H�13 +4
3H3p3x�12 � 3H2�1
22 +H4p3x�2
2 �
4H3�122 � 2H4�2
3;
15 =3
2H4p3x�13 � 3H3�1
23 +12
5H5p3x�23 � 9H4�123 �
36
5H5�2
23
+3
2H6p3x�3
2 � 275H5�13
2;
16 = 9H6�232 � 27
7H7�3
3 +8
5H5p3x�14 � 3H4�1
24 +8
3H6p3x�24 �
48
5H5�124 � 8H6�2
24;
17 =24
7H7p3x�34 � 12H6�1134 �
144
7H7�234 �
48
7H7�14
2 �
16H9�342 � 32
5H10�4
3:
18 = H�12 + 2H2�12 +
4
3H3�2
2 + 2H3�13 + 3H4�23 +
9
5H5�3
2;
+2H4�14 +16
5H5�24 + 4H
6�34 +16
7H7�4
2:
173

Bibliography
[1] W. Wang, J. H. Walton, K. L, McCarthy, Flow pro�les of power law �uids in scraped
surface heat exchanger geometry using MRI, J. Food Proc. Eng., 22, 11-27, (1999).
[2] A. B. Russell, S. S. H. Burmester, P. J, Winch, Characterization of shear thinning �ow
within a scraped surface heat exchanger, Food and Bio. pro. Proc., 75, 191-197, (1997).
[3] M. Stranzinger, K. Feigl, E. Windhab, Non-Newtonian �ow behavior in narrow annular
gap reactors, Chem. Engng Sci. 56, 3347-3363, (2001).
[4] A. M. Trommelen, W. J. Beek, H. C. Van de Westelaken, A mechanism for heat transfer
in a Votator-type scraped-surface heat exchanger, Chem. Eng. Sci. 26, 1987-2001, (1971).
[5] F. G. F. Qin, X. D. Chen, A. B. Russell, Heat transfer at the subcooled-scraped surface
with/without phase change, AIChE J, 49, 1947-1955, (2003).
[6] A. M. Trommelen, W. J. Beek, The mechanism of power consumption in a Votator-type
scraped-surface heat exchanger, Chem. Eng. Sci. 26, 1977-1986, (1971).
[7] S. Sykora, B. Navratil, O. Karasek, Heat transfer on scraped walls in the laminar and
transitional regions, Coll. Czec. Chem. Comm. 33, 518-528, (1968).
[8] A. P. H. Skelland, Correlation of scraped-9lm heat transfer in the votator, Chem. Eng. Sci.
7, 166-175, (1958).
[9] H. Yamamoto, K. Itoh, S. Taneya, Y. Sogo, Heat transfer in a scraped surface heat ex-
changer, Nippon Shokuhin Kogyo Gakkaishi, 34, 559�565, (1987).
174

[10] R. Cuevas, M. Cheryan, V. L, Porter. Performance of a scraped-surface heat exchanger
under ultra high temperature conditions a dimensional analysis, J. of Food Proc. Eng. 1,
283, (1982).
[11] A. M. Corbett, R. J. Phillips, R. J. Kauten, K. L. McCarthy, Magnetic resonance imag-
ing of concentration and velocity pro�les of pure �uids and solid suspensions in rotating
geometries, J. of Rheol. 39, 907�924, (1995).
[12] P. N. Shankar, M. D. Deshpande, Fluid mechanics in the driven cavity, Ann. Rev. Fluid
Mech., 32, 93-136, (2000).
[13] R. M. Gri¤th, Fully developed �ow in screw extruders, IEC Fund. 1, 180-187, (1962).
[14] O. R. Burggraf, Analytical and numerical studies of the structure of steady separated �ows,
J. Fluid Mech., 24, 113-151, (1966).
[15] F. Pan, A. Acrivos, Steady �ows in rectangular cavities, J. Fluid Mech., 28, 643-655,
(1967).
[16] M. Nallasamy, K. K. Prasad, On cavity �ow at high Reynolds numbers, J. Fluid Mech.,
79, 391-414, (1977).
[17] A. M. Grillet, B. Yang, B. Khomani, E. S. G, Shaqfeh. Modelling of viscoelastic lid driven
cavity �ow using �nite element simulations, J. Non-Newtonian Fluid Mech., 88, 99-131,
(1999).
[18] E. Mitsoulis, T. Zisis, Flow of Bingham plastics in a lid driven cavity, J. Non-Newtonian
Fluid Mech., 101, 173-180, (2001).
[19] B. Martin, Numerical studies of steady state extrusion process. PhD thesis Cambridge
University (1969).
[20] K. H. Sunn, D. L. Pyle, A. D. Fitt, C. P. Please, M. J. Baines, N. Hall-Taylor, Numerical
study of 2D heat transfer in a scraped surface heat exchanger, Comput. Fluid 33, 869�880,
(2004).
175

[21] M. Baccar, M. S. Abid, Numerical analysis of three-dimensional �ow and thermal behaviour
in a scraped-surface heat exchanger, Rev. Gén. Therm. 36, 782-790, (1997).
[22] M. Baccar, M. S. Abid, Simulation numérique des comportements hydrodynamiques et
thermiques des échangeurs racleurs opérant en régime turbulent, Int J Therm Sci 38, 634-
644, (1999).
[23] K. H. Sunn, D. L. Pyle, M. J. Baines, N. Hall-Taylor, A. D. Fitt, Velocity pro�les and fric-
tional pressure drop for shear thinning materials in lid-driven cavities with fully developed
axial �ow, Chem Eng Sci 61, 4697-4706, (2006).
[24] A. D. Fitt, C. Please, Asymptotic analysis of the �ow of shear-thinning food-stu¤s in
annular scraped heat exchangers, J. Engng Maths 39, 345-366, (2001).
[25] B. R. Du¤y, S. N. Wilson, M. E. M. Lee, A model of �uid �ow in a scraped-surface heat
exchanger. J Eng Math 57, 381-405, (2007).
[26] A. D. Fitt, M. E. M. Lee, C. P. Please, Analysis of heat �ow and channelling in a scraped-
surface heat exchanger, J Eng Math 57, 407-422, (2007).
[27] Rodriguez, M. Pascual, J. J. Derksen, G. M. Van Rosmalen, G. J. Witkamp, Flow and par-
ticle motion in scraped heat exchanger crystallizers, Chem Eng Sci 64, 5153-5161, (2009).
[28] A. A. T. Smith, S. K. Wilson, B. R. Du¤y, N. H. Taylor, Heat and �uid �ow in a scraped-
surface heat exchanger containing a �uid with temperature-dependent viscosity, J Eng
Math 68, 301-325, (2010).
[29] M. Härröd, Scraped surface heat exchangers: a literature survey of �ow patterns, mixing
e¤ects, residence time distribution, heat transfer and power requirements, J Food Proc.
Eng 9 1-62, (1986).
[30] C. S. Rao, R. W. Hartel. Scraped surface heat exchangers, Crit Rev Food Sci Nutr 46,
207-219, (2006) .
[31] R. L. Fosdick, K. R. Rajagopal, Uniqueness and drag for �uids of second grade in steady
motion, Int. J. Non-Linear Mech., 13, 131, (1978).
176

[32] T. E. Akinbobola, S. S. Okoya, The �ow of second grade �uid over a stretching sheet with
variable thermal conductivity and viscosity in the presence of heat source/sink , J. Nieg.
Math. Soc., Vol. 34, 331�342(2016) :
[33] T. Hayat, Y. Wang, A.M. Siddiqui, K. Hutter, S. Asghar, Peristaltic transport of a third-
order �uid in a circular cylindrical tuber Math. Models Methods Appl. Sci., 12, 1691�
1706,(2002).
[34] N. Ahmed, S. U. Jan, U. Khan, S. T. MohyudDin, Heat transfer analysis of third-grade �uid
�ow between parallel plates analytical solutions, Appl. Comput. Math., pp 1�11 (2015).
[35] A. W. Sisko, The �ow of lubricating greases, Ind. Eng. Chem. Res. 50, 1789�1792 (1958).
[36] M. Khan, R. Malik, Forced convective heat transfer to Sisko �uid �ow past a stretching
cylinder A I P. Adv., 2158-3226, (2015).
[37] K. L. Johnson, J. L. Tevaarwerk, Shear behaviour of elastohydrodynamic oil �lms. Proc
R. Soc. Lond. A, 356(12), 215-236(1977).
[38] B. Jacod, P. M. Lugt., M. L. Dumont, J. H. Tripp, C H Venner, Amplitude reduction of
waviness in elastohydrodynamic lubrication using an Eyring �uid model, Proc Instn Mech
Engrs Vol 214 Part J, 343-350; (2000)
[39] P. Filip and J. David, Axial Couette �ow of power-law viscoplastic �uids in concentric
annuli, Journal of Petroleum Science and Engineering, vol. 40, no. 3-4, pp. 111�119, 2003.
[40] S. A. Ga¤ar, V. R. Prasad, E. K. Reddy, MHD free convection �ow of Eyring�Powell �uid
from vertical surface in porous media with Hall/ionslip currents and ohmic dissipation,
Alex. Eng. J., 55, 875�905,(2016).
[41] A. Giacomin, R. B. Bird, L. M. Johnson, A. W. Mix, Ghori. Large-amplitude oscillatory
shear �ow from the corotational Maxwell model, J. Fuel Eng. 166(19), 1081-1099, (2011) :
[42] M. A. Imran, M. Tahir, M. Javaid, M. Imran, Exact solutions for unsteady �ow of a
fractional Maxwell �uid through moving co-axial circular cylinders, J. of Comp. and Theo.
Nano. 13.5,3405-3413 (2016).
177

[43] R. B. Bird, C. A. Robert, O. Hassager, Dynamics of polymeric liquids. Vol. 1, Fluid
mechanics, (1987).
[44] R. R. Huilgol, Continuum mechanics of viscoelastic liquids. Wiley, New York, (1975).
[45] R. L. Fosdick, K. R. Rajagopal, Thermodynamics and stability of �uids of third grade,
Proc R Soc; A339, 351�377, (1980).
[46] G. Adomian, Analytical solutions for ordinary and partial di¤erential equations, Center
for Applied Mathematics, University of Georgia, Athens, Georgia 30602, (1987) U. S. A.
[47] G. Adomian, Nonlinear Stochastic operator equations, Academic Press, San Diego, (1986).
[48] Y. Cherruault, Convergence of Adomian�s method, Kybernotes, 18(20), 31�38, (1990).
[49] Y. Cherruault, G. Adomian, Decomposition methods a new proof of convergence, Math.
Comput. Modelling, 18(12), 103�106, (1993).
[50] G. Adomian, Solving frontier problems of Physics, The Decomposition Method, Kluwer,
Boston, (1994).
[51] A. M. Wazwaz, A reliable modi�cation of Adomian�s decomposition method, Appl. Math.
Comput., 92(1), 1�7, (1998).
[52] A. M. Wazwaz, Partial Di¤erential Equations: Methods and Applications, Balkema Pub-
lishers, Leiden, (2002).
[53] A. M. Wazwaz, The modi�ed decomposition method for analytic treatment of di¤erential
equations, Appl. Math. Comput., 173(1), 165�176, (2006).
[54] A. M. Wazwaz, A new algorithm for solving di¤erential equations of the Lane-Emden type,
Appl. Math. Comput., 118(2/3), 287�310, (2001).
[55] V. Adanhounme, F. P. Code, Solving problme by Adomian decomposition method, Int. J.
of Sci. Eng. Res., 3(1), 220-226, (2012).
[56] A. M. Wazwaz, The modi�ed decomposition method applied to unsteady �ow of gas
through a Porous Medium, Appl. Math. Comput., 118,123-132, (2001).
178

[57] A. Quarteroni, A. Vali, Decomposition method for partial di¤erentials, Oxford Science
Publications, (1999) :
[58] F. A. Hendi, H. O. Bakodah, M. Almazmumy, H. Alzumi, A simple program for solving
non-linear Initial Value Problem using Adomian decomposition method, Int. J. Res. Rev.
Appl. Sci., 12(3), 397-406. (2012) :
[59] A. M. Wazwaz, The modi�ed decomposition method and pade Approximation for solving
the Thomas-Fermi equation, Appl. Math. and Comput., 105(1) ; 11-19; (1999) :
[60] X. G. Luo, A two step Adomian decompsition method, Appl. Math. and Comput., 170(1) ;
570-583; (2005) :
[61] B. Q. Zhang, Q. B. Wu and X. G. Luo, Experimentation with two step Adomian de-
compsition method to solve evolution models, Appl. Math. Comput. 175(2) ,1495-1502;
(2006) :
[62] S. Somal, G. Gokman, Adomian decomposition method for non-linear Sturm-Liouville
problems, Surv. Math. Appli., 2, 11-20, (2007) :
[63] A. M. Wazwaz, Partial di¤erential equations and solitary waves Theory, Higher Education
Press and Springer and Verlag, (2009).
[64] A. A. Raimondi, J. Boyd, The in�uence of surface pro�le on the load capacity of thrust
bearing with centerally pivoted pads, Trans. ASME 77, 321-330, (1955).
[65] W. J. Silliman, L. E. Scriven, Slip of liquid inside a channel exit. Phys. Fluids, 21, 2115�
2116, (1978).
[66] D. E. Weidner, L. W. Schwartz, Contact-line motion of shear-thinning liquids, Phys. Fluids
6, 3535�3538, (1994).
[67] H. P. Greenspan, On the motion of a small viscous droplet that wets a surface, J. Fluid
Mech. 84, 125-143, (1978).
[68] L. M. Hocking, Sliding and spreading of thin two-dimensional drops, Q. J. Mech.
Aple.Math. 34, 37-55, (1981).
179

viii
Greek Letters
the non-Newtonian parameter for second
grade fluid.
are material constants of Eyring-Powell
model.
Non-Newtonian parameter for third
grade fluid.
the slip parameter.
material constant for Eyring fluid.
the Sisko fluid parameter.
material constant for Eyring fluid.
Non-Newtonian parameters for Oldroyd
8-constant fluid model.
the angle of inclination of the blade.
electric conductivity.
stream function in the first region of
SSHE.
stream function in the second region of
SSHE.
stream function in the third region of
SSHE.
,
,
1
2
3