-
7/29/2019 Flow Estimation (1)
1/38
Flow Estimation and Routing
14 . 1 INTRODUCTION
This chapter presents methods and procedures for the estimation,
routing, and attenuation of peakflows and flow volumes for
sub-catchments as a prerequisite to the design of
stormwaterconveyance systems, and detention and retention
facilities. These methods and procedures may beused in conjunction
with Chapter 16 to design stormwater system networks.
14 . 2 Design ARI
Ideally, the design ARI should be selected on the basis of
economic efficiency. In practice,however, economic efficiency is
typically replaced by the concept of level of protection.
Theselection of this level of protection (or ARI), that actually
refers to the exceedance probability of thedesign storm rather than
the probability of failure of the drainage system, is largely based
on localexperience. ARIs to be adopted for the design of minor and
major stormwater systems are providedin Chapter 4.
A fundamental assumption which is made in flow calculations is
that the design flow with a givenARI is produced by a design storm
rainfall of the same ARI. Strictly speaking, the ARI of the
flow
is influenced by other variable factors such as catchment
antecedent wetness. However, the methodspresented in this Manual
have been designed such that the above assumption is
reasonable.
Regardless of the design basis, it is recommended that
performance of the drainage system beexamined for a range of ARIs.
A comparison of results for the various ARIs may indicate the
needfor a different design basis.
14 . 3 STEPS IN FLOW ESTIMATION
The process of flow estimation generally involves the following
main steps. These apply both forestimating design flows, and in
estimating flows for historical events.
determination of time of concentration
rainfall estimation (see Chapter 13)
calculation of rainfall excess
conversion of rainfall excess to runoff
hydrologic/ hydraulic routing
Modern computer models generally use all of the above steps.
Some earlier manual procedures,
such as the Rational Method, simplify or combine one or more
steps to reduce computations. Thissimplification is acceptable on
small, simple catchments but is a significant source of error in
morecomplex situations.
-
7/29/2019 Flow Estimation (1)
2/38
The time of concentration (tc) is often considered to be the sum
of the time of travel to an inlet and
the time of travel in the stormwater conveyance system. In the
design of stormwater drainagesystems, this can be the sum of the
overland flow time and the times of travel in street
gutters,roadside swales, stormwater drains, drainage channels,
small streams, and other waterways. Anumber of methods, mostly
using empirical equations, are provided below for estimating the
time ofconcentration for urban catchments.
14.4.1 Components of Flow Time
Depending on the particular location, the calculation oftc
will include one or a number of
components as shown in Table 14.1.
Table 14. 1 Flow Time Components
Flow Type Components
Overland or 'sheet'flow
natural surfaces landscaped surfaces impervious surfaces
Roof to main pipesystem
residential roofs commercial/industrial
roofs
Open channel open drains kerbs and gutters roadside table drains
monsoon drains engineered waterways natural channels
Underground pipe downpipe to streetgutter
pipe flow within lotsincluding roof drainage,car parks, etc
street drainage pipeflow
14.4.2 Calculation of Flow Time
This section gives procedures for the calculation for each of
the components in Table 14.1. Some ofthese procedures are subject
to uncertainty; the designer should therefore check that the
results arephysically meaningful.
-
7/29/2019 Flow Estimation (1)
3/38
Overland flow over unpaved surfaces initially occurs as sheet
flow for a short time and distance afterwhich it begins to form a
runnel or rill and travels thereafter in a natural channel
form.
In urban areas, the length of overland flow will typically be
less than 50 metres after which the flowwill become concentrated
against fences, paths or structures or intercepted by open
drains.
The formula shown below, known as Friends formula, should be
used to estimate overland sheetflow times. The formulae was derived
from previous work (Friend, 1954) in the form of anomograph (Figure
14.1) for shallow sheet flow over a plane surface.
( 14 . 1 )
where,
to = overland sheet flow travel time (minutes)
L = overland sheet flow path length (m)
n = Horton's roughness value for the surface
S = slope of surface (%)
Note : Values for Horton's 'n ' are similar to those for
Manning's 'n ' for similar surfaces. Values aregiven in Table
14.2.
Some texts recommend an alternative equation, the Kinematic Wave
Equation. However thistheoretical equation is only valid for
uniform planar homogeneous flow. It is not recommended forpractical
application.
Table 14. 2 Values of Mannings 'n' for Overland Flow
Surface Type Manningsn
Range
Concrete/Asphalt** 0.011 0.01-0.013
Bare Sand** 0.01 0.01-0.06
Bare Clay-Loam(eroded)**
0.02 0.012-0.033
Gravelled Surface** 0.02 0.012-0.03
Packed Clay** 0.03
Short Grass** 0.15 0.10-0.20
Light Turf* 0.20Lawns* 0.25 0.20-0.30
Dense Turf* 0.35
-
7/29/2019 Flow Estimation (1)
4/38
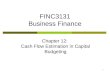
Figure 14.1 Nomograph for Estimating Overland Sheet Flow Times
(Source: ARR, 1977)
( ii ) Overland Flow Time over Multiple Segments
Where the characteristics of segments of a sub-catchment are
different in terms of land cover or
surface slope, the sub-catchment should be divided into these
segments, and the calculated traveltimes for each combined.
However, it is incorrect to simply add the values oft0for each
segment as Equation 14.1 is based on
the assumption that segments are independent of each other, i.e.
flow does not enter a segment fromupstream.
Utilising Equation 14.1, the following method for estimating the
total overland flow travel time for
segments in series is recommended. For two segments, termed a
and b (Figure 14.2):
( 14 . 2 a)
where,
La = length of flow for Segment a
Lb = length of flow for Segment b
ta,(La) = time of flow calculated for Segment a over
lengthLa
tb ,(...) = time for Segment b over the lengths indicated
-
7/29/2019 Flow Estimation (1)
5/38
Figure 14.2 Overland Flow over Multiple Segments
For each additional segment, the following value should be
added:
( 14 . 2 b)
where,
! = segment name
L total = total length of flow, including the current segment
!
L!
= length of flow for current segment !
t!
(...) = time for the current segment a over the lengths
indicated
( iii ) Roof Drainage Flow Time
While considerable uncertainty exists in relation to flow travel
time on roofs, the time of flow in a lotdrainage system to the
street drain, or rear of lot drainage system is generally very
small forresidential lots and may be adopted as the minimum time of
5 minutes. However, for largerresidential, commercial, and
industrial developments the travel time may be longer than 5
minutes in
which case it should be estimated using the procedures for pipe
and/or channel flow as appropriate.
( iv ) Kerb Gutter Flow Time
The velocity of water flowing in kerb gutters is affected
by:
the roughness of the kerb gutter and road surface
the cross-fall of the road pavement the longitudinal grade of
the kerb gutter
-
7/29/2019 Flow Estimation (1)
6/38
An approximate kerb gutter flow time can be estimated from
Figure 14.3 or by the followingempirical equation:
( 14 . 3 )
where,
tg = kerb gutter flow time (minutes)
L = length of kerb gutter flow (m)
S = longitudinal grade of the kerb gutter (%)
Kerb gutter flow time is generally only a small portion of the
time of concentration for a catchment.The errors introduced by
these approximate methods of calculation of the kerb gutter flow
time resultin only small errors in the time of concentration for a
catchment, and hence only small errors in thecalculated peak
flow.
( v ) Channel Flow Time
The time stormwater takes to flow along a open channel may be
determined by dividing the length ofthe channel by the average
velocity of the flow. The average velocity of the flow is
calculated usingthe hydraulic characteristics of the open
channel.
The Manning's Equation is suitable for this purpose:
( 14 . 4 a)
From which,
( 14 . 4 b)
Where,
V = average velocity (m/s)
n = Manning's roughness coefficient
R = hydraulic radius (m)
S = friction slope (m/m)
L = length of reach (m)
t = travel time (minutes)
Wh h l h i h d th it idth it b t
-
7/29/2019 Flow Estimation (1)
7/38
Chapter 25 (derived from Mannings equation) where the flow, pipe
diameter and pipe slope areknown. The time of flow, tp , is then
given by:
( 14 . 5 )
where,
L = pipe length (m)
Where the pipe diameter is not known, the diameter can be first
estimated given the flow at theupstream end of the pipe reach and
the average grade of the land surface between its ends.
As is the case with kerb gutter flow time, pipe flow time is
generally only a small portion of the timeof concentration for a
sub-catchment. The error in the estimated pipe flow time introduced
by theadoption of the wrong diameter or slope, or by the assumption
that the pipe is flowing full when infact it is only flowing part
full, will not introduce major errors into the calculated peak
flow.
In many situations an experienced user will be able to estimate
the velocity of flow in a pipe within areasonable accuracy.
Therefore, the pipe flow time can be estimated directly from
Equation 14.5.
14.4.3 Time of Concentration for Rural Catchment
For larger systems times of concentration should preferably be
estimated on the basis of locallyobserved data such as the time of
occurrence of flood peaks at or near the catchment outlet
comparedwith the time of commencement of associated storms. In the
absence of such information recoursemay be made to empirical
formulae as for instance that of Bransby-Williams.
-
7/29/2019 Flow Estimation (1)
8/38
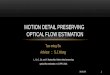
Figure 14. 3 Kerb Gutter Flow Time
For rural catchments and mixed flow paths the time of
concentration can be found by use of theBransby-Williams' Equation
14.6. In these cases the times for overland flow and channel or
streamflow are included in the time calculated.
Here the overland flow time including the travel time in natural
channels is expressed:
( 14 . 6 )
where,
tc
= the time of concentration (minute)
F = a coefficient, 58.5 when areaA in km2
= 92.5 when area in ha
L = Length (km) of flow path from catchment divided to
outlet
A = Catchment Area (km2 or ha, based on value ofF)
S = Equal area slope of stream flow path (m/km).
14.4.4 Standard Time of Concentration for Small Catchments
Although travel time from individual elements of a system may be
very short, the total nominal flowtravel time to be adopted for all
individual elements within any catchment to its point of entry into
the
stormwater drainage network shall not be less than 5
minutes.
For small catchments up to 0.4 hectare in area, it is acceptable
to use the standard minimum times ofconcentration given in Table
14.3 instead of detailed calculation.
Table 14. 3 Standard Minimum Times of Concentration
Location Standard tc (minutes)
Roof and propertydrainage
5
Road inlet pits 5
Small areas < 0.4 hectare 10
14 . 5 RATIONAL METHOD
There are two basic approaches to computing stormwater flows
from rainfall. The first approach is the Rational
-
7/29/2019 Flow Estimation (1)
9/38
The Rational Formula is one of the most frequently used urban
hydrology methods in Malaysia.The formula is:
( 14 . 7 )
where,
Qy = y year ARI peak flow (m3/s)
C = dimensionless runoff coefficient
y
It = y year ARI average rainfall intensity over time of
concentration, tc , (mm/hr)
A = drainage area (ha)
Traditionally, design discharges for street inlets and
stormwater drains have been computed usingthe Rational Method,
although hydrograph methods also can be used for these purposes.
Theprimary attraction of the Rational Method has been its
simplicity. However, now that computerisedprocedures for hydrograph
generation are readily available, computational simplicity no
longer need
be the primary consideration.
Experience has shown that the Rational Method can provide
satisfactory estimates of peak dischargeon most small catchments.
For larger catchments, storage and timing effects can become
significant,and therefore a hydrograph method is needed. Various
methods have been devised to formpseudo-hydrographs based on the
rational formula, but their reliability is uncertain and they
shouldonly be used for the design of on-site stormwater detention
and retention facilities.
14.5.2 Analysis Procedure
A procedure for estimating a peak flow from a single
sub-catchment for a particular ARI using theRational Method is
outlined in Figure 14.4. Peak flow estimates should be obtained for
both theminor and major drainage systems. An example of peak flow
estimation by rational method formulti-subcatchments is given in
Table 16.A9 in Chapter 16.
14.5.3 Assumptions
Assumptions inherent in the Rational Method are as follows:
1. The peak flow occurs when the entire catchment is
contributing to the flow.
2. The rainfall intensity is the same over the entire catchment
area.
3. The rainfall intensity is uniform over a time duration equal
to the time of concentration, tc..
-
7/29/2019 Flow Estimation (1)
10/38
Figure 14. 4 General Procedure for Estimating Peak Flow for a
Single Sub-catchment Using the Rational Method
4 The ARI of the computed peak flow is the same as that of the
rainfall intensity i e a
-
7/29/2019 Flow Estimation (1)
11/38
ponding of stormwater in the catchment might affect peak
discharge.
the design and operation of large (and hence more costly)
drainage facilities is to be undertaken,particularly if they
involve storage.
14.5.4 Rainfall Intensity
The rainfall intensity, I, in the rational formula represents
the average rainfall intensity over aduration equal to the time of
concentration for the catchment.
Refer to Chapter 13 for details on IDF relationships for
estimating design rainfall intensity.
14.5.5 Runoff Coefficient
The runoff coefficient, C, in Equation 14.7 is a function of the
ground cover and a host of otherhydrologic abstractions. The runoff
coefficient accounts for the integrated effects of
rainfallinterception, infiltration, depression storage, and
temporary storage in transit of the peak rate ofrunoff. When
estimating a value for the runoff coefficient, the roles played by
these hydrologicprocesses should be considered. The runoff
coefficient depends on rainfall intensity and duration aswell as
the catchment characteristics. During a rainstorm the actual runoff
coefficient increases asthe soil become saturated. The greater the
rainfall intensity, the lesser the relative effect of
rainfallabstractions on the peak discharge, and therefore the
greater the runoff coefficient. Recommended
runoff coefficient values may be obtained for urban and rural
catchments from Figure 14.5 andFigure 14.6, respectively.
14.5.6 Equivalent Impervious Area
Design flow rates for stormwater inlets are calculated for local
contributing sub-catchments, whilethose for pipes and open drains
are calculated for the accumulated areas draining through each
pipeor open channel section or reach. Except for small lot drainage
systems, it is inappropriate to simplyadd the separate flows from
each sub-catchment. This over-estimates flow rates.
Whentimes-to-peak differ, the total flow from a number of
sub-catchments will have a maximum valueless than the sum of the
separate flows from each sub-catchment.
A more accurate procedure is to sum the equivalent impervious
areas, i.e. the product ofCand Avalues for each sub-catchment.
Design flow rates can be calculated by multiplying total
equivalentimpervious areas by average rainfall intensity values
corresponding to the times of concentration atvarious points along
the drainage line. Use of equivalent impervious areas also allows
segments of
different land use or surface slope within a sub-catchment to be
combined. For example, if asub-catchment consists of three segments
with different land use or surface slope denoted by a, b,and c, the
combined equivalent impervious area is:
( 14 . 8 )
where,
C = runoff coefficient
A = segment area (ha)
-
7/29/2019 Flow Estimation (1)
12/38
intensityyIt (resulting from a lower tc), produces a greater
peak discharge than that if the whole
upstream catchment is considered. This is known as the partial
area effect.
Usually the above effect results from the existence of a
sub-catchment of relatively small C.A,but aconsiderably longer than
average tc . This can result from differences in the shapes and/or
surface
slopes of sub-catchments within a catchment. Typical catchments
that can produce partial areaeffects are shown in Figure 14.7.
It is important to note that particular sub-catchments may not
produce partial area effects whenconsidered individually, but when
combined at some downstream point with other sub-catchments,the
peak discharge may result when only parts of these sub-catchments
are contributing.
The onus is on the designer to be aware of the possibility of
the partial area effect and to check as
necessary to ensure that the correct peak discharge is
obtained.
14.5.8 Limitations
A principal limitation of the Rational Method is that only a
peak discharge is produced. Therefore,the simple form of the
Rational Method cannot be used to calculate the volume or shape of
the runoffhydrograph, which is required for the design of
facilities that use storage such as detention andretention
basins.
-
7/29/2019 Flow Estimation (1)
13/38
-
7/29/2019 Flow Estimation (1)
14/38
-
7/29/2019 Flow Estimation (1)
15/38
Figure 14. 7 Urban Catchments Likely to Exhibit Partial Area
Effects
-
7/29/2019 Flow Estimation (1)
16/38
14 . 6 HYDROGRAPH METHODS
14.6.1 Basic Concepts
This section discusses methods that should be used to develop a
design hydrograph. Hydrographmethods must be used whenever rainfall
spatial and temporal variations or flow routing/storageeffects need
to be considered. Flow routing is important in the design of
stormwater detention,water quality facilities, and pump stations,
and also in the design of large stormwater drainagesystems to more
precisely reflect flow peaking conditions in each segment of
complex systems.
Hydrograph methods can be computationally involved and computer
programs (refer Chapter 17)are usually used to generate runoff
hydrographs.
( a ) Storm Intensity, Duration and Frequency
Design storm duration is an important parameter that defines the
rainfall depth or intensity for agiven ARI, and therefore affects
the resulting runoff peak. The design storm duration that
producesthe maximum runoff peak traditionally defined as the time
of concentration. Design storminformation is provided in Chapter
13.
The rainfall intensity, yIt, used in hydrograph methods
represents the average rainfall intensity over aparticular duration
t. This combination of average intensity and duration must have an
ARI y equalto the desired ARI of the peak discharge. Rainfall
intensity therefore depends on:
the desired ARI of the peak discharge
the duration under consideration
the local IDF relationship
Refer to Chapter 13 for details on IDF relationships for
estimating design rainfall intensity.
Current practice is to select the design storm duration as one
equal to or longer than the time ofconcentration for the catchment
(or some minimum value when the time of concentration is
short).Intense rainfalls of short durations usually occur within
longer-duration storms rather than asisolated events. It is common
practice (Packman and Kidd, 1980) to compute discharge for
severaldesign storms with different durations, and then base the
design on the "critical" storm whichproduces the maximum discharge.
However the "critical" storm duration determined in this waymay not
be the most critical for storage design.
Recommended practice is to compute the design flood hydrograph
for several storms with differentdurations equal to or longer than
the time of concentration for the catchment, and to use the
onewhich produces the most severe effect on the pond size and
discharge for design.
( b ) Spatial Distribution
Storm spatial characteristics are important for larger
catchments. In general, the larger the catchmentd h h h i f ll d i
h l if l h i f ll i di ib d h h
Spatial distributions can be represented in hydrograph methods
However for areas of less than 10
-
7/29/2019 Flow Estimation (1)
17/38
Spatial distributions can be represented in hydrograph methods.
However for areas of less than 10
km2 in urban drainage systems the areal reduction factor can be
neglected. It is also commonpractice to neglect any effects due to
storm movement direction.
( c ) Temporal Distribution
Commonly used approaches to distribute rainfall within a design
storm were discussed inChapter 13. The temporal distribution
adopted can have a significant effect on the shape of therunoff
hydrograph, and on the peak discharge.
The recommended design temporal patterns are presented in
Chapter 13.
( d ) Rainfall Excess
Not all of the rainfall that falls on a catchment, produces
runoff. Some rainfall losses occur, such asevaporation,
infiltration and depression storage. The remaining rainfall after
subtracting rainfalllosses is called the rainfall excess.
In the Rational Method, described in the previous section, the
concept of rainfall excess is not useddirectly. Instead the runoff
coefficient allows for rainfall losses. Rainfall excess concepts
are usedin most hydrograph methods and this discussion focuses
mainly on those methods.
The physical processes of interception of rainfall by
vegetation, infiltration of water into the soilsurface, and storage
of water in surface depressions are commonly termed rainfall
abstractions.Although these three processes are physically complex,
simplified modeling procedures have beenfound give acceptable
results for urban stormwater drainage.
Values can be derived by analysing observed rainfall and runoff
data. Since individual values aredependent on the particular
rainfall and catchment wetness characteristics of the event,
individual
values have little meaning except as indicators of those
particular events. For design, an averagevalue is usually needed,
and since there is no reason for expecting loss rate values for a
catchment toconform to any particular distribution, the median of
the derived values is probably the mostappropriate for design.
In discussing losses it is important to distinguish between
directly connected impervious areas(DCIA) and pervious areas. The
main rainfall losses only apply to pervious areas. Imperviousareas
that are not directly connected to the pipe system, such as tennis
courts and concrete paths that
are surrounded by pervious (grassed) surfaces, are also subject
to losses because water must passover these and possibly infiltrate
before reaching a point of entry to a pipe or open drain.
(i) Evaporation Losses
Evaporation is generally insignificant and is neglected during
the short-duration storms of concern instormwater drainage
design.
(ii) Interception/ Depression Storage Losses
The predominant form of loss on pervious surfaces is by
infiltration. Some of the most frequently
-
7/29/2019 Flow Estimation (1)
18/38
The predominant form of loss on pervious surfaces is by
infiltration. Some of the most frequentlyused types of loss models
are illustrated in Figure 14.8.
Figure 14. 8 Typical Loss Models for Estimating Rainfall
Excess
These five types of loss models are described below.
(a) loss (and hence runoff) is a constant fraction of rainfall
in each time period : this is similar tothe Rational Method runoff
coefficient concept.
(b) constant loss rate : where the rainfall excess is the
residual left after a selected constant rate ofinfiltration
capacity is satisfied.
(c) initial loss and continuing loss: which is similar to (2)
except that no runoff is assumed tooccur until a given initial loss
capacity has been satisfied, regardless of the rainfall rate.
Thecontinuing loss is at a constant rate. A variation of this model
is to have an initial loss followed by a
It should be noted that loss values derived according to one of
the models are not directly
-
7/29/2019 Flow Estimation (1)
19/38
g ytransferable to other models. The choice of loss model
therefore depends in part on the choice offlow estimation method.
In most urban stormwater drainage applications this is not a
seriousproblem as the losses are generally only small in comparison
to rainfall, and therefore a high degreeof accuracy in estimation
is not necessary.
Loss values are derived by analysing observed rainfall and
runoff data. Since individual values are
dependent on the particular rainfall and catchment wetness
characteristics of the event, individualvalues have little meaning
except as indicators of those particular events. For design, an
averagevalue is usually needed, and since there is no reason for
expecting loss rate values for a catchment toconform to any
particular distribution, the median of the derived values is
probably the mostappropriate for design.
(iv) Choice of Infiltration Loss Model
Choice and validity of the 5 models depend on the data available
and the likely runoff processes.
Models (a) and (b) are not often used in current practice. Model
(e), the U.S. Soil ConservationService approach is not very
suitable for urban drainage. It has given only fair results when
tested inthe United States. Models (c) or (d) are recommended for
use in Malaysian urban drainagesituations. Table 14.4 contains
recommended values for use by drainage designers.
Table 14. 4 Recommended Loss Models and Values for Pervious
Areas (Note 1)
Condition Loss Model (Note2)
Recommended Values
Urban areasgenerally
Initial loss-Lossrate
Initial loss: 10 mm Loss rate: 5mm/hr
Urban areas
>80 hectares
As above, or Initial
loss proportionalloss
Initial loss: 10 mm Proportional
Loss: 20% ofrainfall
Continuoussimulation
Horton model withregeneration ofinfiltration
Initial Infiltration Capacity f0
A. DRY soils (little or no vegetation)
Sandy soils: 125 mm/hrLoam soils: 75 mm/hrClay soils: 25
mm/hr
For dense vegetation, multiply valuesgiven in A by 2
B. MOIST soils
Soils which have drained but not driedout: divide values from A
by 3
Soils close to saturation: value close to
saturated hydraulic conductivity
Soils partially dried out: divide valuesfrom A by 1.5-2.5
Hydrologic SoilGroup (Note 3),UltimateInfiltration Ratefc
(mm/hr)
A 10 7.5B 7.5 3.8C 3.8 1.3D 1.3 - 0
If a subcatchment contains areas of different surface condition
or land use weighted average values
-
7/29/2019 Flow Estimation (1)
20/38
If a subcatchment contains areas of different surface condition
or land use, weighted average valuesof losses for different
conditions or land uses, such as proportions of pervious and
imperviousareas, can be derived using methods similar to those in
Section 14.5.6.
For continuous modeling, the choice of loss model becomes much
more significant. The modelmust provide for infiltration capacity
to be 'restored' during dry periods in between rainfall events.
The Horton model with regeneration is recommended, as used in
SWMM.
Hortons equation is widely used for describing infiltration
capacity in a soil. It describes thedecrease in capacity as more
water is absorbed by the soil, and has the form:
( 14 . 9 )
where,
f= the infiltration capacity (mm/hr) at time t,
f0 andfc = the initial and final constant rates of infiltration
(mm/hr)
k= a shape factor (recommended value of 4 /hr)
t= the time from the start of rainfall (hours)
14 6 2 Ti A M h d
-
7/29/2019 Flow Estimation (1)
21/38
14.6.2 Time-Area Method
Time-area methods utilise a convolution of the rainfall excess
hyetograph with a time-area diagramrepresenting the progressive
area contributions within a catchment in set time increments.
Separatehydrographs are generated for the impervious and pervious
surfaces within the catchment. These arecombined to estimate the
total flow inputs to individual sub-catchment entries to the
underground
urban drain network.
The time-area method dates from the research of Ross in 1922.
Networked urban drainage adoptionsof the procedure however only
date back to 1963. This computerised program known as the
TRRLMethod was developed by the UK Transport and Road Research
Laboratory (TRRL), described byWatkins (1963). In the US Terstriep
and Stall (1974) further developed the method to includepervious
runoff. In South Africa Watson (1981) made a number of additional
changes particularlyto the way infiltration was estimated. Between
1982 and 1986 OLoughlin (1988) using Watsonsmodel as a basis
carried out extensive changes once again to formulate a
computerised package known
as ILSAX. The sub-catchment runoff estimating procedure still
utilises the basic time-area method toestimate both pervious and
impervious portion runoff.
The peak discharge, Qp , is the sum of flow contributions from
subdivisions of the catchment defined
by time contours (called isochrones), which are lines of equal
flow time to the point where Qp is
required. The method is illustrated in Figure 14.9. The flow
from each contributing area bounded bytwo isochrones (T- !T, T) is
obtained from the product of the mean intensity of effective
rainfall ( i )from time T- !T to the area (!A). Thus, QA,, the flow
atXat time 4 hours is given by:
( 14 . 10 a)
i.e.,
( 14 . 10 b)
As with the Rational Method, the whole catchment is taken to be
contributing to the flow after Tequals Tc..
Using the above nomenclature, the peak flow at X when the whole
catchment is contributing to theflow, a period Tc after the
commencement of rain, is:
( 14 . 11 )
where,
n = the number of incremental areas between successive
isochrones, given by (Tc/ !T)
k = a counter
The unrealistic assumption made in the Rational Method of
uniform rainfall intensity over the wholecatchment during the whole
ofTc is avoided in the timearea method, where the catchment
contributions are subdivided in time. The varying intensities
within a storm are averaged over discrete
constructed. From the beginning of the flow in drain 1 at T = 0
there is a steady increase in area
-
7/29/2019 Flow Estimation (1)
22/38
ycontributing until T= T1 which is the value ofTc for area A 1.
Drain 2 begins to contribute to the
outfall flow at T= T3 before T= T1. After a further period, T2 ,
area 2 reaches its own Tc at time T=
T2 + T3. Between times T3 and T1 , both drains have been flowing
and the joint contributing area (at
C) at T= T1 is given by:
(14. 12 )
Figure 14. 9 TimeArea Method
From T= (T2 + T3), both areas are contributing fully. The
timearea curve for the combined drains is
the composite line OBCD.
The principle of the TRRL Hydrograph Method is outlined in
Figure 14.10. In Figure 14.10 (a), acatchment area, divided into
four sub-areas, is drained by a single channel to the outfall where
thehydrograph is required. Sub-area 1 begins contributing to the
flow first, to be followed sequentiallyby the other three
sub-areas. The individual timearea curves are shown in Figure 14.10
(b) and
i th b t ib ti t l ti i t l d th it f th h l
rainfall will contribute to the direct runoff from the catchment
area. Excess rainfall rates are computedi d i h S i 14 6 1(d) Fi 14
10 ( ) h h ff i f i f ll f
-
7/29/2019 Flow Estimation (1)
23/38
in accordance with Section 14.6.1(d). Figure 14.10 (c) shows the
effective rates of rainfall excess foreach time unit i1, i2, i3,
etc, for the storm duration (9 time units).
The discharge rates after each time interval are given by:
Figure 14.10 (d) shows the sequence of discharges forming the
runoff hydrograph at the outfall.
Figure 14.10 TRRL Hydrograph Method
Two further considerations are necessary. A time of entry from
the onset of the storm rainfall to the
time of flow into the pipe is usually taken to be 2 minutes and
must be allowed for in thecomputations. Secondly, experience has
shown that there is a certain amount of retention of water inthe
channel, and amendments to the hydrograph must be made to account
for channel storage(Watkins, 1962).
14 .6.3 Kinematic Wave Method
The kinematic-wave method is a hydraulic method for routing
runoff across planar surfaces and
through small channels and pipes. The kinematic-wave formulation
couples the continuity equationwith a simplified form of the
momentum equation that includes only the bottom-slope
andfriction-slope terms. Kinematic-wave theory is only valid for
one-dimensional overland flow on aplanar surface. It therefore has
little practical use in urban drainage applications.
Figure 14.11 shows the catchment conceptualised as a reservoir
with rainfall as inflow, and infiltrationand surface discharge as
outflows The depth y represents the average depth of surface runoff
and the
-
7/29/2019 Flow Estimation (1)
24/38
and surface discharge as outflows. The depth y represents the
average depth of surface runoff, and thedepth ydrepresents the
average depression storage in the catchment. The continuity
relationship for
this system is:
( 14 . 13 )
where,
A = catchment area
I = rainfall intensity
f = the infiltration rate
Q = the discharge at the catchment outlet
The model assumes uniform overland flow at the catchment outlet
at a depth equal to the differencebetween y andyd. Based on the
Manning friction relationship, the catchment discharge, Q is
given
by:
( 14 . 14 )
where,
W = a representative width for the catchment
n = the average value of the Manning roughness coefficient for
the catchment
S = average surface slope
Substituting Equation 14.14 into Equation 14.13 yields a
non-linear differential equation for y. A simple finite
difference form of the equation is used to solve for the depth y
at the end of each time step. Thisequation is:
( 14 . 15 )
where,
!t = time step increment
y1 = depth at the beginning of the time step
y2 = depth at the end of the time step
I = average rainfall rate over the time step
-
7/29/2019 Flow Estimation (1)
25/38
Figure 14. 11 Definition Sketch for Non-linear Reservoir
Model
For each time step, three separate calculations are performed.
First, an infiltration equation is used tocompute the average
potential infiltration rate over the time step (in the SWMM
program, the userselects either the Green-Ampt or the Horton
infiltration equation), then Equation 14.15 is solvediteratively
for y
2, and, finally, Equation 14.14 yields the corresponding
discharge.
Unlike the time-area method, which uses excess rainfall as
input, the non-linear-reservoir methodcouples the processes of
infiltration and surface runoff. The non-linear-reservoir model
assumes thatinfiltration occurs at the potential rate over the
entire surface area whenever the ponded depth isnon-zero. The
excess-rainfall models, on the other hand, entirely neglect
infiltration of pondedwater. This difference becomes important
following cessation of rainfall, or whenever the rainfallintensity
drops below the potential infiltration rate. In reality,
infiltration does continue for some timeafter rainfall ceases, but
the area over which infiltration continues to occurs after rainfall
ceases would
tend to be underestimated by the non-linear-reservoir methods
and overestimated by theexcess-rainfall methods, though the
difference will depend on the degree of discretisation used, since
amore detailed schematisation can partially account for the
phenomenon of decreasing area ofinfiltration.
14.6.5 Generalised Analysis Procedure
A procedure for estimating a runoff hydrograph from a single
sub-catchment for a particular ARI and
duration is outlined in Figure 14.12. Hydrographs should be
obtained for both minor and majordrainage systems.
-
7/29/2019 Flow Estimation (1)
26/38
Flow routing is the process of converting a hydrograph that
passes through some part of a flow systemto allow for the changes
that occur during its passage. There are three main types of flow
routing:
-
7/29/2019 Flow Estimation (1)
27/38
g g p g yp g
catchment routing, which converts a rainfall excess hyetograph
into a hydrograph at thecatchment outlet, allowing for the
distribution of rainfalls over the catchment surface, and various
lagsor delays along flow paths;
channel routing, which allows for the changes in hydrographs as
they flow along river or channelreaches, caused by variations in
the channel geometry which result in storage effects,
reservoir routing, which allows for storage effects in a
concentrated, level pool reservoir.Broadly defined, flow routing is
an analytical procedure intended to trace the flow of water through
ahydrological system, pond, conveyance, or porous media, given some
runoff event hydrograph asinput. The procedure determines the flow
hydrograph at a point downstream, from known or
assumed flow hydrographs at one or more points upstream. If the
flow is a runoff event such as aflood, then the procedure is
specifically known as flood routing. Routing by lumped system
methodsis called hydrological routing. These methods calculate the
flow as a function of time alone. Routingby distributed system
methods is called hydraulic routing, and the flow is calculated as
a function ofboth space and time throughout the system.
For hydrologic routing the input I (t), output Q(t), and storage
S(t) are related by the continuityequation:
( 14 . 16 )
If an inflow I(t) is known Equation 14.16 cannot be solved
directly to obtain the outflow Q (t),because both Q and Sare
unknown. A second relationship, the storage function, is required
to relateI ,S, and Q. Coupling the continuity equation with the
storage function provides a solvablecombination of two equations
and two unknowns.
The specific form of the storage functions to be employed in
hydrologic routing depends on thenature of the system being
analysed. In reservoir routing by the level-pool method, storage is
anon-linear function ofQ only, i.e. S= f(Q ), and the function, f(Q
), is determined by relating reservoirstorage and outflow to
reservoir water level. In channel routing by theMuskingum method,
storage islinearly related to Iand Q. Similarly, in porous media,
storage is a function of outflow which dependson storage in the
media and the underlying soils.
14 . 8 FLOW THROUGH POND AND RESERVOIR
14. 8 .1 Hydrologic Routing
Level-pool routing is a procedure for calculating the outflow
hydrograph from a pond reservoir,assuming a horizontal water
surface, given its inflow hydrograph and
storage-dischargecharacteristics. When a reservoir has a horizontal
water surface, its storage is a function of itswater-surface
elevation, or depth in the pool. Likewise, the discharge is a
function of the watersurface elevation, or head on the outlet
works. Combining these two functions yields the
invariablesingle-valued function.
Integration of the continuity equation (Equation 14.16) over the
discrete time intervals provides an
are pre-specified (i.e. the inflow hydrograph ordinates). The
values Qj and Sj are known at the jth
time interval Hence Equation 14 17 contains two unknowns Q j +1
and S j +1 which are isolated by
-
7/29/2019 Flow Estimation (1)
28/38
time interval. Hence Equation 14.17 contains two unknowns, Qj +1
and Sj +1, which are isolated by
multiplying Equation 14.17 by 2/!tand rearranging the result to
produce:
( 14 . 18 )
In order to calculate the outflow Qj +1 from Equation 14.18, a
storage-discharge function relating
2S /!t+ Q and Q is needed. The method of developing this
function using stage-storage andstage-discharge relationship is
shown in Figure 14.13.
For a given water-surface elevation, the values of storage Sand
discharge Q are determined. Then,
the value of2S /!t+Q is calculated and plotted against Q. In
routing the flow through thejth time
-
7/29/2019 Flow Estimation (1)
29/38
S Q p g Q g g jinterval, all terms in the right-hand-side of
Equation 14.18 are known, and so the value of2Sj+1/! t+Q can be
computed. The corresponding value ofQj+1 can be determined from
the
storage-discharge function 2S /!t+Q versus Q. To set up the data
for the next time interval, the value2Sj+1/! t -Qj+1 is calculated
by:
( 14 . 19 )
The computation is repeated iteratively for subsequent routing
periods. Input requirements for thisrouting method are:
the storage-discharge relationship the storage-indication
relationship the inflow hydrograph initial values of the outflow
rate (Q1) and storage (S1)
the routing interval (!t)An analysis procedure for hydrologic
routing is shown in Figure 14.14.
-
7/29/2019 Flow Estimation (1)
30/38
Figure 14. 14 General Analysis Procedure for Hydrologic
Routing
14.8.2 Two-Dimensional Hydraulic Routing
Two-dimensional hydraulic routing is especially useful for pond
and lake design that involvesstructures and water quality The
governing equations of a depth averaged two dimensional model
Continuity Equation
-
7/29/2019 Flow Estimation (1)
31/38
( 14 . 20 )
Momentum Equations
x - direction:
( 14 . 21 a)
y - direction:
( 14 . 21 b)
where,
H = h + !
h = still water depth
! = free surface displacement
and are bottom shear stresses in which it is generally assumed
that:
( 14 . 21 c)
( 14 . 21 d)
where,
u and v are depth-averaged velocity components
n = the Manning roughness coefficient
For flows in small and medium size waterbodies such as detention
ponds, the effects of wind and earthrotation are insignificant
compared to the driving forces neglected.
The equations are normally solved by finite differences or
finite elements methods. Theirnon-linearity is handled by the
Newton Raphson technique. There are only a few general
softwareprograms such as WASP4 (USEPA, 1987) commercially
available. Others are available from R&Dinstitutes such as
RESPOND from the University of Virginia USA (Wu 1992) The flow
equations
The constant infiltration model provides a method of analysis
and evaluating the hydraulics ofsoakage pits. This model can be
used to calculate the maximum water level occurring in a
giveninfiltration system during a design storm event, thus allowing
the required depth of a system to be
-
7/29/2019 Flow Estimation (1)
32/38
infiltration system during a design storm event, thus allowing
the required depth of a system to becalculated. This section
introduces equations for a maximum water level for both plane
andthree-dimensional infiltration drainage systems.
Applying the flow balance approach (Equation 14.16) to
infiltration drainage facilities where,
S = S(h ) , the volume of water stored in the infiltration
system
Q in = I(t ) , the inflow of runoff
Qout = O (t ) , the outflow through infiltration
and,
h = water level above the depth of water in the infiltration
system
t = time since the start of the rainfall event
Considering the Storage
The storage available depends on whether or not the facility is
rubble-filled.
( 14 . 22 )
where,
V = V(h) , the volume of the water filled part of the facility
and is a function of the geometry of thesystem
n = effective porosity of any fill material and is unity if the
system is not rubble-filled
The hydrological balance equation may therefore be written
as:
( 14 . 23 )
The water level in the system, h(t) , can be found at any time,
t, by inserting appropriate functions ofQ in (t), Qout(t), and V(h)
into Equation 14.23, rearranging for h , and integrating with
respect to time.
Considering the Inflow
It is assumed that the facility receives a constant rate of
runoff, estimated from the Rational Formula.
, for a duration D ( 14 . 24 )
where,
I = intensity of the rainfall
A D = impermeable area drained
AW= wetted infiltration surface area of the facility which
depends on the geometry of the system and
is a function of the water depth, h
-
7/29/2019 Flow Estimation (1)
33/38
qf = the infiltration coefficient which includes an appropriate
factor of safety
With these assumptions, a flow balance equation may be written
for h from Equation 14.23:
( 14 . 26 )
The design method requires integration of Equation 14.26 in
order to derive formulae describing thewater level, h, at given
times, t. These formulae depend on the geometrical functionsAW(h)
and
V(h). For simple geometries, Equation 14.26 may be solved
analytically. For complex geometries, it
can only be solved using an approximate method or numerical
integration.
Once a solution to Equation 14.26 is found for a particular type
of infiltration system, the highestwater level, hmax , can be found
for a particular storm event. Using the constant inflow
function
described above, the highest water level will occur at the end
of the storm event when tequals thestorm duration, D.
14.9.2 Hydraulic Routing
Infiltration drainage systems are founded in the unsaturated
zone above the water table. Adiagrammatic representation of the
conceptual model of soakage pit hydraulics in which groundwaterflow
in the unsaturated zone is taken into account is shown in Figure
12.13. It is envisaged that a'bulb' of saturation becomes
established around the pit. As groundwater flows away from the pit
areathrough which it passes increases due to the three-dimensional
nature of the flow and the soil becomesunsaturated. Thus to provide
a realistic description of the hydraulic behaviour of infiltration
system,both saturated and unsaturated groundwater flows have been
considered in this section.
( a ) Saturated Groundwater Hydraulics
Allowing for storage to occur in the soil for non-steady flow
conditions, the general 3-dimensionalequations of motion for
homogeneous-isotropic saturated phreatic groundwater flow is:
( 14 . 27 )
where,
N = stormwater recharge (+ve) or abstraction (-ve) rate
S = the specific yield/ effective porosity
t = time
h = phreatic water level
k = saturated hydraulic conductivity
Unsaturated groundwater flow differs from saturated groundwater
flow in that the hydraulic propertiesof the soil, the hydraulic
conductivity and the storage coefficient both depend on the degree
ofsaturation of the soil. As there is both water and air present in
the soil, capillary action exerts a force,
-
7/29/2019 Flow Estimation (1)
34/38
or soil suction, and so the water in the soil is below
atmospheric pressure. The degree of soil suction,or negative
pressure, also depends on the degree of saturation and the soil
properties.
From Darcys equation (Chapter 12), the one-dimensional
infiltration equation of motion forunsaturated groundwater flow
is:
( 14 . 28 )
where,
! = the volumetric moisture content
z = elevation head
k = unsaturated hydraulic conductivity
The equation is often referred to as the modified Richards
equations (1931) and can be simplyextended to 3-dimensions for real
world problems. The hydraulic conductivity - pressure headfunction
may be defined as:
( 14 . 29 )
where,
k = the hydraulic conductivity
ks = the saturated hydraulic conductivity
kr = the relative hydraulic conductivity
The moisture content - pressure head function may be defined
as:
( 14 . 30 )
where,
! = moisture content
n = porosity
q r = relative saturation (Sr < !r
-
7/29/2019 Flow Estimation (1)
35/38
14 . 10 FLOW THROUGH CONVEYANCE
14.10.1 Hydrologic Routing
A widely used hydrologic method for routing flows in conveyance
systems is the Muskingum method.It models the storage volume of
flow in a channel reach by a combination of wedge andprism
storage(Figure 14.15). When the flood wave is advancing, inflow
exceeds outflow and a positive wedge ofstorage is produced. When
the flood is receding, outflow exceeds inflow and a negative
wedgeresults. In addition, a prism of storage is formed by a volume
of (approximately) constantcross-section along the length of the
channel reach.
Assuming that the cross-sectional area of the flow is directly
proportional to the discharge at the
section, the volume of prism storage is KQ , where K is a
coefficient of proportionality. The volumeof wedge storage is
assumed to be equal to KX(I-Q), whereX is a weighting factor having
the range0!X!0.5. The total storage is defined as the sum of the
two storage components S=KQ+KX(I-Q)which can be rearranged to give
the linear storage function for the Muskingum method:
( 14 . 31 )
Figure 14.15 Prism and Wedge Storage in a Channel Reach
The value ofXdepends on the shape of the modeled wedge storage,
X= 0 corresponds to reservoir
(level-pool) storage and Equation 14.31 reduces to S= KQ.X= 0.5
for a full wedge. In most naturalstream channels, X is between 0
and 0.3, with a mean value near 0.2. Great accuracy in
determiningXis usually not necessary because the Muskingum method
is not sensitive to this parameter.
The parameter K is the time of travel of the flood wave through
the reach. Although techniques existthat allow for the values
ofKandX to vary according to flow rate and channel characteristics
(e.g.,the Muskingum-Cunge method), for hydrologic routing the
values ofKandXare assumed to bespecified and constant throughout
the range of flow. The change in storage over the time interval
!t(fromj toj+1) is:
( 14 .32 )
( 14 . 34 a )
-
7/29/2019 Flow Estimation (1)
36/38
( 14 . 34 b )
( 14 . 34 c )
Note that C1 +C2 +C3 = 1.
The values ofKandX are determined usingobserved inflow and
outflow hydrographs in thechannel reach. By assuming various values
ofXand known values of inflow, successive values ofKcan be computed
using:
( 14 . 35 )
Equation 14.35 is derived from Equations 14.17and 14.32. The
computed values of thenumerator and denominator of Equation
14.35are plotted for each time interval !t, with thenumerator on
the vertical axis and thedenominator on the horizontal axis. This
usuallyproduces a graph in the form of a loop (see
Figure 14.16). The value ofX that produces aloop closest to a
single line is taken to be thecorrect value for the reach. The
parameter K,from Equation 14.35 is the slope of the line forthe
value ofX.
Figure 14.16 Procedure for DeterminingXand K
Values
14.10.2 One-dimensional Hydraulic Routing
Procedures for distributed-flow hydraulic routing are popular
because they compute flow rate andwater level as functions of both
space and time. The methodologies are based upon the
Saint-Venantequations of one-dimensional flow. In contrast, the
lumped hydrologic-routing procedures discussedin the previous
sections compute flow rate as a function of time alone
( 14 . 36 a)
-
7/29/2019 Flow Estimation (1)
37/38
Momentum:
( 14 . 36 b)
where,
x = longitudinal distance along the conveyance
t = time
A = cross-sectional area of flow
A0 = cross-sectional area of dead storage (off-channel)
q = lateral inflow per unit length along the conveyance
h = water-surface elevation
vx = velocity of lateral flow in the direction of flow
Sf = friction slope
Se = eddy loss slope
B = width of the conveyance at the water surface
Wf = wind shear force
! = momentum correction factor
g = acceleration due to gravity
The Saint-Venant equations operate under the following
assumptions:1. The flow is one-dimensional with depth and velocity
varying only in the longitudinal direction of
the conveyance. This implies that the velocity is constant and
the water surface is horizontal acrossany section perpendicular to
the longitudinal axis.
2. There is gradually varied flow along the channel so that
hydrostatic pressure prevails and verticalaccelerations can be
neglected.
3. The longitudinal axis of the channel is approximated as a
straight line.4.
The bottom slope of the channel is small and the bed is fixed,
resulting in negligible effects ofscour and deposition.
5. Resistance coefficients for steady uniform turbulent flow are
applicable, allowing for a use ofManning's equation to described
resistance effects
Hydrologic (lumped) routing methods may not perform well in
simulating the flow conditions whenbackwater effects are
significant and the drain or channel slope is mild, because these
methods have nohydraulic mechanisms to describe upstream
propagation of changes in the flow momentum.
-
7/29/2019 Flow Estimation (1)
38/38
APPENDIX 14 .A WORKED EXAMPLES
Time-Area Calculation
A worked example is shown in Table 14.A.1. There are four
increments of area (ha) resulting in a time of
concentration for the catchment equivalent to four time units.
The storm duration extends over 10 time units. A
runoff coefficient of 0.64 has been assumed and thus the total
areal rainfalls in column 2 have been multiplied by 0.64
to give the corresponding effective rainfalls (i mm/hr). The
values ofq for each increment (a ) and effective rainfall
rate (i ) are calculated from:
where q is in m3/s, i is in mm/hr, a is in hectares, and 360 is
the conversion factor for the units used.
Table 14.A1 The TRRL Hydrograph Method (Runoff Coefficient =
0.64)
Time Unit
Areal rate of rain Increment of area (ha)Discharge
q (l/s)Total Effective i
(mm/hr)
a1
0.25
a2
0.82
a3
0.92
a4
0.34
1 13.7 8.8 6.1 6.1
2 90.0 57.6 40.0 20.0 60.0
3 59.4 38.0 26.4 131.2 22.5 180.14 18.3 11.7 8.1 86.6 147.2 8.3
250.2
5 16.3 10.8 7.5 26.7 97.1 54.4 185.7
6 13.7 8.8 6.1 24.6 29.9 35.9 96.5
7 5.3 3.4 2.4 20.0 27.6 11.1 61.1
8 5.1 3.3 2.3 7.7 22.5 10.2 42.7
9 6.1 3.9 2.7 7.5 8.7 8.3 27.2
10 4.6 2.9 2.0 8.9 8.4 3.2 22.5
11 6.6 10.0 3.1 19.7
12 7.4 3.7 11.1
13 2.7 2.7
The summation of the rows across a1 to a4 gives the discharge
values after each time increment, and thus the requiredhydrograph.
It will be noted that the peak flow occurs after the fourth time
interval, the time of concentration of the
catchment. This does not always happen, e.g. with late peaking
rainfalls.