Embed Size (px)
Citation preview

Real-time Ethernet Residual Bus Simulation:A Model-Based Testing Approach for the
Next-Generation In-Car Network
Florian Bartols Till Steinbach Franz Korf Bettina ButhThomas C. Schmidt
Hamburg University of Applied [email protected]
October 10th, 201422nd International Conference on Real-Time Networks and Systems
RE NET

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
RESoftware and functions in modern cars
Functions are implemented mostly in software todayUtilization of software directly influences thedevelopment costsTesting in early development stages reduces thesecostsDistributed development makes early testing difficult
2 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
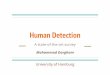
REComplex In-Car Interconnections
On-BoardSystemsOff-BoardSystems
Engine Bus (High-Speed-CAN)
Body Bus (Low-Speed-CAN) Multimedia Bus (MOST)
Diagnostics Bus (CAN / Ethernet)
Chassis Bus (FlexRay)
Doors (LIN)
Lights (LIN)
...
...
...
...
Engine Gearbox Breakes
Door AC Head-lights
Radio/Navi
Front Chassis
Rear Chassis
Dash
boar
d CD/DVD
Cent
ral
Gat
eway
Service
The complexity of current in-car interconnections ishardly manageable
3 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
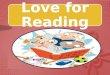
REComplex In-Car Interconnections
On-BoardSystemsOff-BoardSystems
FrontChassis
RearChassis
Engine
Gearbox
Rear Breakes
Doors
ACHead-lights
Radio/ Navi
CD/DVDDash-board
Front Breakes
InternetGPS
RTEthernet Switch
RTEthernet Backbone
Service
RTEthernet Switch
RT Ethernet for in-car interconnection reduces thecomplexity
3 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REContribution
Testing systems and applications in earlydevelopment stages is importantNew applications will rely on RT Ethernet ascommunication technologySuitable methodology is needed to validatedistributed applications
RT Ethernet Residual Bus Simulation enables earlytestingCombination of model-based testing principles tovalidate non-functional requirements
4 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAgenda
1 Motivation & Introduction
2 Background
3 Real-time Ethernet Residual Bus Simulation
4 Application & Results
5 Conclusion & Outlook
5 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REModel-based Testing Approach
The automotive development process is model drivenModels are utilized as specifications for
Representing implementation detailsModeling system requirements
Test cases are systematically inherited from modelsExecution of cases on different test platforms
MiL, SiL, PiL, HiL and Residual Bus Simulation
6 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REResidual Bus Simulation
The remaining network is simulated from theviewpoint of the SUTSUT and simulator are coupled via thecommunication interfaceBehavior and network specific characteristics arerealistically emulatedThe simulator pretends to be a physical system
7 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
RERT Ethernet as In-Car NetworkAttributes of TTEthernet
TTEthernet provides three different message classes
BE0
Multimedia
BE BE
t
BE BE BE
BE Best-Effort Message
t
RCHeadlight
RC
0
RC Rate-Constrained Message
TTE-Switch
TTE-Switch
t
Chassis
TTTT
0 Cycle
Cycle0
t
TTTT
TT Time-Triggered Message
Static designed routing for deterministic behaviorSynchronized time base for time-triggeredcommunication
8 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAgenda
1 Motivation & Introduction
2 Background
3 Real-time Ethernet Residual Bus Simulation
4 Application & Results
5 Conclusion & Outlook
9 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
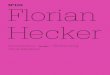
REModel-based MethodologyOverview
Requirements
Models
DownloadTest Case
Generation
T 1 s 2 s 5 s 7 s 9 s 11 sU u1 = HL_OFF u1 = LED_0 u1 = LED_100 u1 = LED_50 u1 = LED_101 u1 = LED_75
Y y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
Yact y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
L l1(u1, y1) = 500 µs�L jL1(l1) 100 µsLact l1(u1, y1) = 517 µs to 518 µs, MED = 518 µs, AVG = 518 µsR r1(y1) = 5000 µs�R jR1(r1) 10 µsRact r1(y1) = 4998 µs to 5002 µs, MED = 5000 µs, AVG = 5000µs
Table 3: Tested application with positive test result. Dark gray cells depict negative, light gray positive test results
7. REFERENCES[1] Aeronautical Radio Incorporated. Aircraft Data
Network, Part 7, Avionics Full-Duplex SwitchedEthernet Network. Standard ARINC Report 664P7-1,ARINC, 2009.
[2] E. Bringmann and A. Kramer. Model-Based Testingof Automotive Systems. In 2008 1st Int. Conf. onSoftware Testing, Verification and Validation, pages485–493, Apr. 2008.
[3] S. Demathieu, F. Thomas, C. Andre, S. Gerard, andF. Terrier. First Experiments Using the UML Profilefor MARTE. In 11th IEEE Int. Symp. on ObjectOriented Real-Time Distributed Computing 2008,pages 50–57, Piscataway, New Jersey, May 2008. IEEEPress.
[4] Eberspacher. FlexConfig RBS - Remaining BusSimulation for FlexRay and CAN with FlexConfigRBS. http://www.eberspaecher-electronics.com, 2014.
[5] FlexRay Consortium. FlexRay CommunicationsSystem Electrical Physical Layer Specification.Specification 3.0.1, FlexRay Consortium, Stuttgart,Oct. 2010.
[6] T. M. Galla. Cluster Simulation in Time-TriggeredReal-Time Systems. PhD-Thesis, TU Wien, Dec. 1999.
[7] International Organization for Standardization. Roadvehicles – Controller Area Network (CAN). ISO11898, ISO, Genf, 2003.
[8] O. Karfich, F. Bartols, T. Steinbach, F. Korf, andT. C. Schmidt. A Hardware/Software Platform forReal-time Ethernet Cluster Simulation in OMNeT++.In Proc. of the 6th Int. ICST Conf. on SimulationTools and Techniques, pages 334–337, New York, Mar.2013. ACM-DL.
[9] MOST Cooperation. MOST Specification Rev. 3.0 E2.Technical report, MOST, July 2010.
[10] K. Muller, T. Steinbach, F. Korf, and T. C. Schmidt.A Real-time Ethernet Prototype Platform forAutomotive Applications. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 221–225,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[11] Object Management Group. MARTE - Modeling AndAnalysis Of Real-Time Embedded Systems.
[12] Object Management Group. UML - Unified ModelingLanguage.
[13] OMNeT++ Community. OMNeT++ 4.4.1.
[14] A. Pretschner, M. Broy, I. H. Kruger, and T. Stauner.Software Engineering for Automotive Systems: ARoadmap. In 2007 Future of Software Engineering,
FOSE ’07, pages 55–71, Washington, DC, USA, May2007. IEEE Computer Society.
[15] P. Skruch, M. Panek, and B. Kowalczyk. Model-BasedTesting in Embedded Automotive Systems. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,Editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 19, pages 545–578.CRC Press, Boca Raton, Florida, Sept. 2011.
[16] Society of Automotive Engineers - AS-2D TimeTriggered Systems and Architecture Committee.Time-Triggered Ethernet AS6802. SAE Aerospace,Nov. 2011.
[17] T. Steinbach, H. Dieumo Kenfack, F. Korf, and T. C.Schmidt. An Extension of the OMNeT++ INETFramework for Simulating Real-time Ethernet withHigh Accuracy. In Proc. of the 4th Int. ICST Conf. onSimulation Tools and Techniques, pages 375–382, NewYork, Mar. 2011. ACM-DL.
[18] T. Steinbach, F. Korf, and T. C. Schmidt. Real-timeEthernet for Automotive Applications: A Solution forFuture In-Car Networks. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 216–220,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[19] T. Steinbach, H.-T. Lim, F. Korf, T. C. Schmidt,D. Herrscher, and A. Wolisz. Tomorrow’s In-CarInterconnect? A Competitive Evaluation of IEEE802.1 AVB and Time-Triggered Ethernet (AS6802). In2012 IEEE Vehicular Technology Conf. (VTC Fall),Piscataway, New Jersey, Sept. 2012. IEEE Press.
[20] W. Steiner and G. Bauer. Mixed-criticality Networksfor Adaptive Systems. In 2010 IEEE/AIAA 29thDigital Avionics Systems Conf. (DASC), pages5.A.3–1–5.A.3–10, Oct. 2010.
[21] M. Utter, A. Pretschner, and B. Legeard. ATaxonomy of Modelbased Testing. Technical ReportWorking Paper: 04/2006, University of Waikato,Hamilton, New Zealand, Apr. 2006.
[22] Vector Informatik. CANoe 8.2 - ECU Development &Test with CANoe. http://vector.com, 2014.
[23] J. Zander, I. Schiefdecker, and P. J. Mosterman. ATaxonomy of Modelbased Testing for EmbeddedSystems from Multiple Industry Domains. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 1, pages 3–22. CRCPress, Boca Raton, Florida, Sept. 2011.
Test Cases
T 1 s 2 s 5 s 7 s 9 s 11 sU u1 = HL_OFF u1 = LED_0 u1 = LED_100 u1 = LED_50 u1 = LED_101 u1 = LED_75
Y y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
Yact y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
L l1(u1, y1) = 500 µs�L jL1(l1) 100 µsLact l1(u1, y1) = 517 µs to 518 µs, MED = 518 µs, AVG = 518 µsR r1(y1) = 5000 µs�R jR1(r1) 10 µsRact r1(y1) = 4998 µs to 5002 µs, MED = 5000 µs, AVG = 5000µs
Table 3: Tested application with positive test result. Dark gray cells depict negative, light gray positive test results
7. REFERENCES[1] Aeronautical Radio Incorporated. Aircraft Data
Network, Part 7, Avionics Full-Duplex SwitchedEthernet Network. Standard ARINC Report 664P7-1,ARINC, 2009.
[2] E. Bringmann and A. Kramer. Model-Based Testingof Automotive Systems. In 2008 1st Int. Conf. onSoftware Testing, Verification and Validation, pages485–493, Apr. 2008.
[3] S. Demathieu, F. Thomas, C. Andre, S. Gerard, andF. Terrier. First Experiments Using the UML Profilefor MARTE. In 11th IEEE Int. Symp. on ObjectOriented Real-Time Distributed Computing 2008,pages 50–57, Piscataway, New Jersey, May 2008. IEEEPress.
[4] Eberspacher. FlexConfig RBS - Remaining BusSimulation for FlexRay and CAN with FlexConfigRBS. http://www.eberspaecher-electronics.com, 2014.
[5] FlexRay Consortium. FlexRay CommunicationsSystem Electrical Physical Layer Specification.Specification 3.0.1, FlexRay Consortium, Stuttgart,Oct. 2010.
[6] T. M. Galla. Cluster Simulation in Time-TriggeredReal-Time Systems. PhD-Thesis, TU Wien, Dec. 1999.
[7] International Organization for Standardization. Roadvehicles – Controller Area Network (CAN). ISO11898, ISO, Genf, 2003.
[8] O. Karfich, F. Bartols, T. Steinbach, F. Korf, andT. C. Schmidt. A Hardware/Software Platform forReal-time Ethernet Cluster Simulation in OMNeT++.In Proc. of the 6th Int. ICST Conf. on SimulationTools and Techniques, pages 334–337, New York, Mar.2013. ACM-DL.
[9] MOST Cooperation. MOST Specification Rev. 3.0 E2.Technical report, MOST, July 2010.
[10] K. Muller, T. Steinbach, F. Korf, and T. C. Schmidt.A Real-time Ethernet Prototype Platform forAutomotive Applications. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 221–225,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[11] Object Management Group. MARTE - Modeling AndAnalysis Of Real-Time Embedded Systems.
[12] Object Management Group. UML - Unified ModelingLanguage.
[13] OMNeT++ Community. OMNeT++ 4.4.1.
[14] A. Pretschner, M. Broy, I. H. Kruger, and T. Stauner.Software Engineering for Automotive Systems: ARoadmap. In 2007 Future of Software Engineering,
FOSE ’07, pages 55–71, Washington, DC, USA, May2007. IEEE Computer Society.
[15] P. Skruch, M. Panek, and B. Kowalczyk. Model-BasedTesting in Embedded Automotive Systems. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,Editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 19, pages 545–578.CRC Press, Boca Raton, Florida, Sept. 2011.
[16] Society of Automotive Engineers - AS-2D TimeTriggered Systems and Architecture Committee.Time-Triggered Ethernet AS6802. SAE Aerospace,Nov. 2011.
[17] T. Steinbach, H. Dieumo Kenfack, F. Korf, and T. C.Schmidt. An Extension of the OMNeT++ INETFramework for Simulating Real-time Ethernet withHigh Accuracy. In Proc. of the 4th Int. ICST Conf. onSimulation Tools and Techniques, pages 375–382, NewYork, Mar. 2011. ACM-DL.
[18] T. Steinbach, F. Korf, and T. C. Schmidt. Real-timeEthernet for Automotive Applications: A Solution forFuture In-Car Networks. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 216–220,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[19] T. Steinbach, H.-T. Lim, F. Korf, T. C. Schmidt,D. Herrscher, and A. Wolisz. Tomorrow’s In-CarInterconnect? A Competitive Evaluation of IEEE802.1 AVB and Time-Triggered Ethernet (AS6802). In2012 IEEE Vehicular Technology Conf. (VTC Fall),Piscataway, New Jersey, Sept. 2012. IEEE Press.
[20] W. Steiner and G. Bauer. Mixed-criticality Networksfor Adaptive Systems. In 2010 IEEE/AIAA 29thDigital Avionics Systems Conf. (DASC), pages5.A.3–1–5.A.3–10, Oct. 2010.
[21] M. Utter, A. Pretschner, and B. Legeard. ATaxonomy of Modelbased Testing. Technical ReportWorking Paper: 04/2006, University of Waikato,Hamilton, New Zealand, Apr. 2006.
[22] Vector Informatik. CANoe 8.2 - ECU Development &Test with CANoe. http://vector.com, 2014.
[23] J. Zander, I. Schiefdecker, and P. J. Mosterman. ATaxonomy of Modelbased Testing for EmbeddedSystems from Multiple Industry Domains. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 1, pages 3–22. CRCPress, Boca Raton, Florida, Sept. 2011.
T 1 s 2 s 5 s 7 s 9 s 11 sU u1 = HL_OFF u1 = LED_0 u1 = LED_100 u1 = LED_50 u1 = LED_101 u1 = LED_75
Y y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
Yact y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75
L l1(u1, y1) = 500 µs�L jL1(l1) 100 µsLact l1(u1, y1) = 517 µs to 518 µs, MED = 518 µs, AVG = 518 µsR r1(y1) = 5000 µs�R jR1(r1) 10 µsRact r1(y1) = 4998 µs to 5002 µs, MED = 5000 µs, AVG = 5000µs
Table 3: Tested application with positive test result. Dark gray cells depict negative, light gray positive test results
7. REFERENCES[1] Aeronautical Radio Incorporated. Aircraft Data
Network, Part 7, Avionics Full-Duplex SwitchedEthernet Network. Standard ARINC Report 664P7-1,ARINC, 2009.
[2] E. Bringmann and A. Kramer. Model-Based Testingof Automotive Systems. In 2008 1st Int. Conf. onSoftware Testing, Verification and Validation, pages485–493, Apr. 2008.
[3] S. Demathieu, F. Thomas, C. Andre, S. Gerard, andF. Terrier. First Experiments Using the UML Profilefor MARTE. In 11th IEEE Int. Symp. on ObjectOriented Real-Time Distributed Computing 2008,pages 50–57, Piscataway, New Jersey, May 2008. IEEEPress.
[4] Eberspacher. FlexConfig RBS - Remaining BusSimulation for FlexRay and CAN with FlexConfigRBS. http://www.eberspaecher-electronics.com, 2014.
[5] FlexRay Consortium. FlexRay CommunicationsSystem Electrical Physical Layer Specification.Specification 3.0.1, FlexRay Consortium, Stuttgart,Oct. 2010.
[6] T. M. Galla. Cluster Simulation in Time-TriggeredReal-Time Systems. PhD-Thesis, TU Wien, Dec. 1999.
[7] International Organization for Standardization. Roadvehicles – Controller Area Network (CAN). ISO11898, ISO, Genf, 2003.
[8] O. Karfich, F. Bartols, T. Steinbach, F. Korf, andT. C. Schmidt. A Hardware/Software Platform forReal-time Ethernet Cluster Simulation in OMNeT++.In Proc. of the 6th Int. ICST Conf. on SimulationTools and Techniques, pages 334–337, New York, Mar.2013. ACM-DL.
[9] MOST Cooperation. MOST Specification Rev. 3.0 E2.Technical report, MOST, July 2010.
[10] K. Muller, T. Steinbach, F. Korf, and T. C. Schmidt.A Real-time Ethernet Prototype Platform forAutomotive Applications. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 221–225,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[11] Object Management Group. MARTE - Modeling AndAnalysis Of Real-Time Embedded Systems.
[12] Object Management Group. UML - Unified ModelingLanguage.
[13] OMNeT++ Community. OMNeT++ 4.4.1.
[14] A. Pretschner, M. Broy, I. H. Kruger, and T. Stauner.Software Engineering for Automotive Systems: ARoadmap. In 2007 Future of Software Engineering,
FOSE ’07, pages 55–71, Washington, DC, USA, May2007. IEEE Computer Society.
[15] P. Skruch, M. Panek, and B. Kowalczyk. Model-BasedTesting in Embedded Automotive Systems. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,Editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 19, pages 545–578.CRC Press, Boca Raton, Florida, Sept. 2011.
[16] Society of Automotive Engineers - AS-2D TimeTriggered Systems and Architecture Committee.Time-Triggered Ethernet AS6802. SAE Aerospace,Nov. 2011.
[17] T. Steinbach, H. Dieumo Kenfack, F. Korf, and T. C.Schmidt. An Extension of the OMNeT++ INETFramework for Simulating Real-time Ethernet withHigh Accuracy. In Proc. of the 4th Int. ICST Conf. onSimulation Tools and Techniques, pages 375–382, NewYork, Mar. 2011. ACM-DL.
[18] T. Steinbach, F. Korf, and T. C. Schmidt. Real-timeEthernet for Automotive Applications: A Solution forFuture In-Car Networks. In 2011 IEEE Int. Conf. onConsumer Electronics - Berlin, pages 216–220,Piscataway, New Jersey, Sept. 2011. IEEE Press.
[19] T. Steinbach, H.-T. Lim, F. Korf, T. C. Schmidt,D. Herrscher, and A. Wolisz. Tomorrow’s In-CarInterconnect? A Competitive Evaluation of IEEE802.1 AVB and Time-Triggered Ethernet (AS6802). In2012 IEEE Vehicular Technology Conf. (VTC Fall),Piscataway, New Jersey, Sept. 2012. IEEE Press.
[20] W. Steiner and G. Bauer. Mixed-criticality Networksfor Adaptive Systems. In 2010 IEEE/AIAA 29thDigital Avionics Systems Conf. (DASC), pages5.A.3–1–5.A.3–10, Oct. 2010.
[21] M. Utter, A. Pretschner, and B. Legeard. ATaxonomy of Modelbased Testing. Technical ReportWorking Paper: 04/2006, University of Waikato,Hamilton, New Zealand, Apr. 2006.
[22] Vector Informatik. CANoe 8.2 - ECU Development &Test with CANoe. http://vector.com, 2014.
[23] J. Zander, I. Schiefdecker, and P. J. Mosterman. ATaxonomy of Modelbased Testing for EmbeddedSystems from Multiple Industry Domains. InJ. Zander, I. Schiefdecker, and P. J. Mosterman,editors, Model-Based Testing for Embedded Systems,Computational Analysis, Synthesis and Design ofDynamic Systems Series, Chap. 1, pages 3–22. CRCPress, Boca Raton, Florida, Sept. 2011.
Stimuli
Reaction SUTTest Case Execution
Test Data
SUT Data
Requirements are modeled within suitable diagramsTest cases are inherited from the diagramsTest cases are executed on a suitable residual bussimulation platform
10 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REModeling System RequirementsUML-MARTE
Classic UML is not sufficient for embeddedReal-time SystemsUtilization of UML-Profile Modeling and Analysis ofReal-time Embedded Systems (MARTE)
sd MessageProcessing <<TimedConstrained>>on = [MARTE_Library::TimedLibrary::idealClock]
<<timedConstrained>>{(messageReceived - replySent) = (500,µs)}{(jitter(messageReceived - replySent)) ≤ (100,µs)}
Dashboard-System Headlight-Controller
setNewLightStatus(status)
@messageReceived
@replySent
sendCurrentLightStatus(status)
11 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAbstract Test CasesDefinition
Base Model
System y(t)u(t)
ATCFR = (T ,U,Y )
Modeling specific values ofinputs and outputs atspecific points in time
Extending the Model
System y(t)u(t)
Latency
Rate
t1 t2t3
ATCNFR =(T ,U,Y , L,R,∆L,∆R)
Extending with reply time(latency) & transmission rate(rate)
12 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAbstract Test CasesUtilization
Abstract representation of to be generated test dataModeling functional requirements with expectedoutputModeling non-functional requirements with expectedtiming constraintsUtilization as simulation model to drive the simulator
13 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REImplementation of our ApproachRequirements and Architecture
RequirementsTTEthernet compliant message transmissionSupport of timing analyzesExecution of the abstract test case model
ConfiguratorUML-MARTE
Models
XML-Doc
Abstract Test Case
Residual Bus Simulator
DPM
SUT
EthernetFrames
14 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAgenda
1 Motivation & Introduction
2 Background
3 Real-time Ethernet Residual Bus Simulation
4 Application & Results
5 Conclusion & Outlook
15 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REOverview of the physical system
Drive-by-wire (W) Switch Switch Drive-by-
wire (SW)
Camera Multimedia Display
Headlight L Headlight R
Lightcontrol Dashboard
MultimediaDashboard
SuT
to be simulated by the residual bus simulator
Light control dashboard transmits new light statesHeadlights reply each received light state andPeriodically provide their current light stateLight control dashboard presents the light state tothe user
16 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REValidating the Headlight ControllerRequirement Modelling with UML-MARTE
sd MessageProcessing <<TimedConstrained>>on = [MARTE_Library::TimedLibrary::idealClock]
<<timedConstrained>>{(messageReceived - replySent) = (500,µs)}{(jitter(messageReceived - replySent)) ≤ (100,µs)}
Dashboard-System Headlight-Controller
setNewLightStatus(status)
@messageReceived
@replySent
sendCurrentLightStatus(status)
Timing requirements of the reply messageLatency: 500 µsJitter: ± 50 µs
17 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REValidating the Headlight ControllerRequirement Modelling with UML-MARTE
sd TimedStateTransmission
<<TimedConstrained>>on = [MARTE_Library::TimedLibrary::idealClock]
Dashboard-SystemHeadlight-Controller
@ sentStatusi
updateCurrentLightstatus(status)
<<timedConstrained>>{(sendStatusi - sendStatusi-1) = (5000,µs)}{(jitter(sendStatusi - sendStatusi-1)) ≤ (10,µs)}
Repeat[“timedEvent” (5,ms)]
<<TimedProcessing>>on = [MARTE_Library::TimedLibrary::idealClock]
Timing requirements of the message transmissionRate: 5000 µsJitter: ± 5 µs
18 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REValidating the Headlight Controller
T 1 s 2 s 5 s 7 s 9 s 11 sU u1 = HL_OFF u1 = LED_0 u1 = LED_100 u1 = LED_50 u1 = LED_101 u1 = LED_75Y y1 = HL_OFF y1 = LED_0 y1 = LED_100 y1 = LED_50 y1 = LED_50 y1 = LED_75Yact y1 = HL_OFF y1 = HL_OFF y1 = HL_OFF y1 = HL_OFF y1 = HL_OFF y1 = HL_OFFL l1(u1, y1) = 500 µs
∆L jL1(l1) ≤ 100 µsLact l1(u1, y1) = 518 µs to 518 µs, MED = 518 µs, AVG = 518 µsR r1(y1) = 5000 µs
∆R jR1(r1) ≤ 10 µsRact r1(y1) = 4998 µs to 5002 µs, MED = 5000 µs, AVG = 5000 µs
Functional requirements cannot be fulfilledExpected values are not located at the outputNon-functional timing requirement are fulfilledLatency of the acknowledgement lay within theallowed range
19 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REAgenda
1 Motivation & Introduction
2 Background
3 Real-time Ethernet Residual Bus Simulation
4 Application & Results
5 Conclusion & Outlook
20 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REConclusion
Residual bus simulator is directly connected with theSUTMessage classes and a synchronization procedure aresupportedNon-functional timing requirements are modeledwithin UML-MARTEAbstract test case model models functional andnon-functional test dataUtilization of abstract test cases as simulation modelSuccessful utilization for the validation of an RTEthernet application
21 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
REOutlook
Investigate how AUTOSAR and EAST-ADL couldco-exist with our approachImplement a RBS with a more suitable architecturewithout dual-port memoryAnalyze the real-time and performance aspects ofthe new architecture
22 / 23

Hochschule für Angewandte Wissenschaften Hamburg Hamburg University of Applied Sciences
RT-Ethernet ResidualBus Simulation
F. Bartols
Motivation &Introduction
Background
RT Ethernet RBS
Application & Results
Conclusion & Outlook
RE
Thank you for your attention
Visit us at:https://core.informatik.haw-hamburg.de
23 / 23